Research Article Dynamic Output Feedback Based Active...
15
Research Article Dynamic Output Feedback Based Active Decentralized Fault-Tolerant Control for Reconfigurable Manipulator with Concurrent Failures Yuanchun Li, 1 Fan Zhou, 1 and Bo Zhao 1,2 1 Department of Control Engineering, Changchun University of Technology, Changchun 130012, China 2 State Key Laboratory of Management and Control for Complex Systems, Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China Correspondence should be addressed to Bo Zhao; [email protected] Received 10 July 2014; Revised 27 November 2014; Accepted 29 November 2014 Academic Editor: Gerhard-Wilhelm Weber Copyright © 2015 Yuanchun Li et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e goal of this paper is to describe an active decentralized fault-tolerant control (ADFTC) strategy based on dynamic output feedback for reconfigurable manipulators with concurrent actuator and sensor failures. Consider each joint module of the reconfigurable manipulator as a subsystem, and treat the fault as the unknown input of the subsystem. Firstly, by virtue of linear matrix inequality (LMI) technique, the decentralized proportional-integral observer (DPIO) is designed to estimate and compensate the sensor fault online; hereaſter, the compensated system model could be derived. en, the actuator fault is estimated similarly by another DPIO using LMI as well, and the sufficient condition of the existence of ∞ fault-tolerant controller in the dynamic output feedback is presented for the compensated system model. Furthermore, the dynamic output feedback controller is presented based on the estimation of actuator fault to realize active fault-tolerant control. Finally, two 3-DOF reconfigurable manipulators with different configurations are employed to verify the effectiveness of the proposed scheme in simulation. e main advantages of the proposed scheme lie in that it can handle the concurrent faults act on the actuator and sensor on the same joint module, as well as there is no requirement of fault detection and isolation process; moreover, it is more feasible to the modularity of the reconfigurable manipulator. 1. Introduction e rapid development of robotics leads the reconfigurable manipulators to be variously applied to the potential unstruc- tured environments, especially in the fields where human cannot intervene directly, such as the space station, nuclear power plant, and battle field. However, once the fault appeared in the system, it might deteriorate the performance or cause the loss of the system functionality, even stabil- ity. As a result, there is an increasing demand for safety, reliability, and performance of reconfigurable manipulator systems. erefore, it is an urgent requirement to design control systems which can tolerate the occurrence of failures during the operation, in order to guarantee the stability and functionality and maintain the acceptable performance as well. Generally speaking, two strategies, namely, the passive fault-tolerant control (PFTC) and the active fault-tolerant control (AFTC), were carried out to achieve the aim at FTC [1]. For the PFTC, the control structure and parameters have been redesigned to go against the occurring of failures. is means that the FTC was fixed to tolerate a certain set of faults without any change in the controller. Du et al. [2] obtained the fault information by estimating the outputs of the actuators and then compared them with the corresponding prescribed control inputs; hereaſter, the FTC was developed by choosing a safe-park point. Jiang et al. [3] presented the sliding mode FTC method in the view of the nonlinear flexible spacecraſt flywheel failure, while in fact it was difficult to obtain the minimum value of the spacecraſt flywheel fault. Brambilla et al. [4] adopted an optimal second-order sliding mode control method to design observer-control law, by using Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2015, Article ID 528086, 14 pages http://dx.doi.org/10.1155/2015/528086
Transcript of Research Article Dynamic Output Feedback Based Active...
Research ArticleDynamic Output Feedback Based ActiveDecentralized Fault-Tolerant Control for ReconfigurableManipulator with Concurrent Failures
Yuanchun Li1 Fan Zhou1 and Bo Zhao12
1Department of Control Engineering Changchun University of Technology Changchun 130012 China2State Key Laboratory of Management and Control for Complex Systems Institute of AutomationChinese Academy of Sciences Beijing 100190 China
Correspondence should be addressed to Bo Zhao zhaob09mailsjlueducn
Received 10 July 2014 Revised 27 November 2014 Accepted 29 November 2014
Academic Editor Gerhard-WilhelmWeber
Copyright copy 2015 Yuanchun Li et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The goal of this paper is to describe an active decentralized fault-tolerant control (ADFTC) strategy based on dynamic outputfeedback for reconfigurable manipulators with concurrent actuator and sensor failures Consider each joint module of thereconfigurable manipulator as a subsystem and treat the fault as the unknown input of the subsystem Firstly by virtue oflinear matrix inequality (LMI) technique the decentralized proportional-integral observer (DPIO) is designed to estimate andcompensate the sensor fault online hereafter the compensated systemmodel could be derivedThen the actuator fault is estimatedsimilarly by another DPIO using LMI as well and the sufficient condition of the existence of 119867
infinfault-tolerant controller in the
dynamic output feedback is presented for the compensated system model Furthermore the dynamic output feedback controlleris presented based on the estimation of actuator fault to realize active fault-tolerant control Finally two 3-DOF reconfigurablemanipulators with different configurations are employed to verify the effectiveness of the proposed scheme in simulationThemainadvantages of the proposed scheme lie in that it can handle the concurrent faults act on the actuator and sensor on the same jointmodule as well as there is no requirement of fault detection and isolation process moreover it is more feasible to the modularityof the reconfigurable manipulator
1 Introduction
The rapid development of robotics leads the reconfigurablemanipulators to be variously applied to the potential unstruc-tured environments especially in the fields where humancannot intervene directly such as the space station nuclearpower plant and battle field However once the faultappeared in the system it might deteriorate the performanceor cause the loss of the system functionality even stabil-ity As a result there is an increasing demand for safetyreliability and performance of reconfigurable manipulatorsystems Therefore it is an urgent requirement to designcontrol systems which can tolerate the occurrence of failuresduring the operation in order to guarantee the stability andfunctionality and maintain the acceptable performance aswell
Generally speaking two strategies namely the passivefault-tolerant control (PFTC) and the active fault-tolerantcontrol (AFTC) were carried out to achieve the aim at FTC[1] For the PFTC the control structure and parameters havebeen redesigned to go against the occurring of failures Thismeans that the FTC was fixed to tolerate a certain set of faultswithout any change in the controller Du et al [2] obtained thefault information by estimating the outputs of the actuatorsand then compared them with the corresponding prescribedcontrol inputs hereafter the FTC was developed by choosinga safe-park point Jiang et al [3] presented the sliding modeFTC method in the view of the nonlinear flexible spacecraftflywheel failure while in fact it was difficult to obtain theminimum value of the spacecraft flywheel fault Brambillaet al [4] adopted an optimal second-order sliding modecontrol method to design observer-control law by using
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 528086 14 pageshttpdxdoiorg1011552015528086
2 Mathematical Problems in Engineering
the unknown input observer and generalized observer toanalyze residuals but this method can only detect a singlecomponent failure In [5] a decentralized tuning PID outputfeedback controller was utilized to ensure the stability of largeflexible space structures (LFSS) suffered sensor and actuatorfailures Moreover a common solution in the PFTC whensome severe failures are taken into account does not alwaysexist In addition it usually presented a low performanceeven though it exists On the other hand the AFTC maychange the control structure andor parameters to overcomethe bad effect on the whole control systems aroused by thefault Even when necessary it needs to introduce a detectionand estimation module to detect and estimate when thefault occurs Hereafter a supervisory controller should bereconstructed based on the estimated information in the caseof the occurrence of severe faults [6 7] such that it canguarantee the faulty systemrsquos stability and provide acceptablecontrol performance In [8ndash12] only single fault is handledwith AFTC but the concurrent failures on actuator andsensor always occur in actual fact In this regard Rotondo etal [13] used virtual actuator and sensor to correct the actualactuator and sensor faults which achieved the objective ofFTC based on the dynamical controller reconfiguration Samiand Patton [14] proposed a new architecture based on acombination of actuator and sensor Takagi-Sugeno (T-S)proportional state estimators augmented with proportionaland integral feedback (PPI) fault estimators together witha T-S dynamic output feedback control for time-varyingreference tracking
In recent literatures some effort has been made forthe reconfigurable manipulators in fault Yuan et al [15]introduced an energy efficiency monitor approach to detectthe fault where the operation failure was reflected by theefficiency decline of mechanical systemThemeasurement ofeach joint torque is used not only to control the running statebut also to reflect the output capacity The method based ontorque measurement is independent of the whole dynamicmodel of robot systems Ahmad et al [16] presented a dis-tributed fault detection method which can gain the forecasterror through comparing the joint torque signal and torqueestimation being filtered Zhao and Li [17] were concernedwith the active fault-tolerant control problem for reconfig-urablemanipulator actuator based on local joint informationThis scheme processed a simple control structure as well asthe fault could be isolated and tolerated in subsystem and itcan be easily applied to different configurations without anyparameters modification However only a single fault in theactuator or sensor was taken into account to be handled inthe aforementioned methods which limited the availabilityin practice
There are severalmethods successfully used in controllingreconfigurable manipulator In centralized control approachLi et al [18] utilized the elastic parameters of joint modulewhich were identified by fuzzy logic to build finite elementmodel of reconfigurable robot then based on the BP neuralnetwork and genetic algorithm the vibration control methodwas proposed based on the finite element model Sun et al[19] divided 4-DOF module into posture coupled subsys-tems and position feedback subsystem and simultaneously
decomposedworkspace into the above two subspaces to solvethe inverse position problem through forecasting methodBiglarbegian et al [20] presented Type-2 TSK fuzzy logiccontrol method aimed at the reconfigurable manipulatorswith uncertain dynamic parameters This control structurehad a complex and fixed control structure and lackedflexibility thus it was difficult to be implemented to thereconfigurable manipulator when its configuration changedThe other one was distributed control method Muller etal [21] simplified the hardware of control system to ensurethe flexibility of system reconstruction and coordinated tooperate all modular robots through independent centralcontrol Zhu and Lamarche [22] described the system as aset of subsystems through virtual decomposition and thenused the exchange information amongmodules to design thesubsystemrsquos controller The distributed control method canreduce computational complexity and has a more harmo-nious and flexible structure compared to those in centralizedcontrol it makes the system compatibility not only betterbut also more suitable to the concept of modularizationThisdistributed control could conduct more thorough coordinatecontrol however the time delay in communication can resultin imprecise control performance To reduce the difficultyin controller design the decentralized control strategy isdeveloped in a large-scale system In fact the main propertyof the reconfigurable manipulator system lies in differentconfigurations and different degree of freedom Therefore itis more suitable to take a jointmodule as a subsystem and thedecentralized control method can satisfy its main propertyKirchoff and Melek [23] designed a PID robust controllerbased on independent joint information for industrial robotLi [24] introduced a dispersion saturated type of robustcontrol method only considering the single joint dynamicsafter the system was decoupled and treated the influence ofother jointsrsquo dynamics as external disturbanceThe controllerdesign in decentralized control approach utilizes only localinformation thus it is more suitable for the system with anuncertain degree of freedom and different configurations
This paper tries to address an ADFTC for reconfigurablemanipulator with concurrent failures This idea focuses onthe observer design for isolating and estimating the actuatorand sensor faults for the purpose of fault compensation Itdecomposes the entire system into a set of interconnectedsubsystems for developing decentralized control architectureADPIO is designed through using LMI technique to estimateand compensate the sensor fault online and the compen-sated system model is derived Similarly another DPIO isestablished with the sufficient condition of the existence of119867infinfault-tolerant controller and presented in the presence of
the dynamic output feedback Simultaneously the ADFTC isrealized by the estimation of the faults based on the dynamicoutput feedback Finally simulation results show the stabilityand accuracy in the tracking system with simultaneouslyacting actuators and sensors faults
The main advantages of the proposed approach lie inthe following (i) Only local information is used to designthe ADFTC for reconfigurable manipulator with the conceptof decentralized control which can tolerate the concurrentfaults acting in actuator and sensor in an independent joint
Mathematical Problems in Engineering 3
module (ii) LMI technique is used in the design procedure ofDPIOs and dynamic output feedback controller simplifyingthe control structure and making the proof process of systemstability easier on the condition of ensuring the systemstability (iii) There is no requirement of FDI unit here soit saves the reconfiguration time which is necessary in theconventional AFTC (iv) Compared to the existing resultsthe dynamic output feedback is utilized as the state feedbackin the proposed scheme meanwhile it could balance thecontradictions between the irreplaceable state feedback andthe difficulty in physical realization
This paper is presented in the following order Section 2describes nonlinear interconnected subsystem dynamicmodel of the reconfigurable manipulator including thesystems with fault or without fault Section 3 enters into adescription of the observers followed by two subsectionswhich illustrate the stability and performance designconditions for (i) sensor fault estimate observer and (ii)the actuator fault estimate observer In Section 4 thedynamic output feedback controller is designed and itillustrates the stability and performance design conditionsIn Section 5 the effectiveness of the proposed ADFTCmethod is verified by the simulation results of two 3-DOFreconfigurable manipulators with different configurationsSome conclusions are drawn in Section 6
2 Problem Description
For the development of decentralized control consider theentire reconfigurable manipulator with 119899-DOF as a set ofnonlinear interconnected subsystems which are composedof a general joint module And the subsystem 119868 in thereconfigurable manipulator system can be presented by thefollowing state equation [25]
119878119894
119894= 119860119894119909119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) 119906119894+ ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894
(1)
where 119909119894= [1199091198941 1199091198942]119879
= [119902119894 119902119894]119879
(119894 = 1 2 119899) is the statevector of the subsystem 119878
119894and 119910
119894is the output of the sub-
system 119878119894 The matrices
119860119894= [
0 1
0 0] 119861
119894= [
0
1] 119862
119894= [
1 0
0 1]
119891119894(119902119894 119902119894) = 119872
minus1
119894(119902119894) [minus119862119894(119902119894 119902119894) 119902119894minus 119866119894(119902119894)]
119892119894(119902119894) = 119872
minus1
119894(119902119894)
ℎ119894(119902 119902 119902) = minus119872
minus1
119894(119902119894) 119885119894(119902 119902 119902)
(2)
For the subsystem suffering actuator and sensor failuresconcurrently the faulty dynamic model can be expressed as
119878119894119891
119894= 119860119894119909119894+ 119861119894[119892119894(119902119894) (119906119894+ 119891119894119886)
+119891119894(119902119894 119902119894) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119891119894119904
(3)
here 119891119894119886(119902119894 119902119894 119894) denotes the actuator fault function 119863
119894=
[1 0
0 1] is the sensor fault distribution matrix and 119891
119894119904=
[11989111989411990411198911198941199042]119879 satisfies 119891
119894119904 le 120588119894(119905) where 120588
119894(119905) is a continuous
positive-definite functionThe control objective is to design an active decentralized
fault-tolerant controller in order to guarantee the wholeclosed-loop system stability in the case of the system sufferingconcurrent actuator and sensor faults In other words theproposed fault-tolerant control scheme should make theoutputs of the entire system follow the desired trajectorieseven though concurrent faults occur
3 Decentralized Proportional-IntegralObserver Design
31 Sensor Fault Observer Design In this subsection adecentralized proportional-integral observer is designed forthe faulty dynamic model (3) in order to estimate the sensorfault
Assumption 1 The desired trajectories 119902119889119894 119902119889
119894 and 119902
119889
119894are
bounded
Assumption 2 The subsystem actuator fault function119891119894119886(119902119894 119902119894 119894) and the sensor fault function 119891
119894119904are bounded as
119891119894119886 le 119891lowast
119894119886and 119891
1198941199041 le 119891lowast
1198941199041
Introduce a first order filter as [26]
119894= minus119860
119894119886119911119894+ 119861119894119886119910119894 (4)
Next putting the output of (3) into (4) we have
119894= minus119860
119894119886119911119894+ 119861119894119886119862119894119909119894+ 119861119894119886119863119894119891119894119904 (5)
where 119911119894= [11991111989411199111198942]119879 119910119894is the joint position sensor and
velocity sensor output signal and minus119860119894119886isin 1198772times2 is a Hurwitz
matrix with det(119861119894119886) = 0
Combining the states of (3) and (5) it is gained that
119878119894119891
119894= 119860119894119909119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+ℎ119894(119902 119902 119902)] + 119863
119894119891119894119904
119910119894= 119862119894119909119894
(6)
where 119909119894= [119909119894
119911119894] 119860119894= [119860119894 0
119861119894119886119862119894 minus119860119894119886
] 119861119894= [119861119894
0] 119862119894= [0 119868] and
119863119894= [0
119861119894119886119863119894]
Now utilize the RBF neural networks to approximatethe unknown term 119891
119894(119902119894 119902119894) and uncertainty term 119892
119894(119902119894) as
follows
119891119894(119902119894 119902119894119882119894119891) = 119882
119879
119894119891Φ119894119891(119902119894 119902119894) + 120576119894119891
119892119894(119902119894119882119894119892) = 119882
119879
119894119892Φ119894119892(119902119894) + 120576119894119892
(7)
where 119882119894119891
and 119882119894119892
are the ideal neural network weightsrespectively Φ(sdot) is the neural network basis function and120576119894119891
and 120576119894119892
are the neural network approximation errorsrespectively
4 Mathematical Problems in Engineering
Define 119894119891
and 119894119892
as the estimations of 119882119894119891
and119882119894119892 119891119894(119902119894 119902119894 119894119891) and 119892
119894(119902119894 119894119892) expressed as (8) are the
estimations of 119891119894(119902119894 119902119894119882119894119891) and 119892
119894(119902119894119882119894119892) respectively
119891119894(119902119894 119902119894 119879
119894119891) =
119879
119894119891Φ119894119891(119902119894 119902119894)
119892119894(119902119894 119879
119894119892) =
119879
119894119892Φ119894119892(119902119894)
(8)
where the adjustable parameters are updated by the followingadaptive laws
119882119894119891= 120578119894119891119890119879
119894119875119894119861119894Φ119894119891(119902119894 119902119894)
119882119894119892= 120578119894119892119890119879
119894119875119894119861119894Φ119894119892(119902119894) 119906119894
(9)
where 120578119894119891and 120578119894119892are positive constants
Note that a challenge in implementing the decentralizedcontrol is to compensate the coupling torque caused bythe interconnected joint modules In such a scenario thefollowing assumption is presented
Assumption 3 The interconnection term ℎ119894(119902 119902 119902) is
bounded by [25]
1003816100381610038161003816ℎ119894 (119902119902 119902)1003816100381610038161003816 le
119899
sum
119895=1
119889119894119895119864119895 (10)
with 119889119894119895ge 0 and 119864
119895= 1 + 119890
119879
119894119875119894119861119894 + 119890
119879
1198941198751198941198611198942
Similarly another RBF neural network term 119894(119890119879
119894119875119894119861119894
119894119901) is introduced to compensate the effect of interconnec-
tion term and defined as follows
V119894(119905) = minus sgn (119890119879
119894119875119894119861119894) 119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) (11)
Similarly another RBF neural network expressed as (12)is proposed to achieve this goal
119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) =
119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817) (12)
where 119882119894119901
is the ideal neural network weight and Φ119894119901(sdot)
is the neural network basis function 119894119901
and Φ119894119901
are theestimations of 119882
119894119901and Φ
119894119901 respectively
119894119901= 119894119901minus 119882119894119901
and Φ119894119901= Φ119894119901minus Φ119894119901are relative estimation errors And
119894119901
can be updated by
119882119894119901= 120578119894119901
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817Φ119894119901 (13)
also 120578119894119901is a positive constant
Finally define approximation error
1205961198941= 119882119879
119894119891Φ119894119891(119902119894 119902119894) + 119882
119879
119894119892Φ119894119892(119902119894) 119906119894+ 120576119894119891+ 120576119894119892119906119894
1205961198942= 119877119894
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817minus 119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817)
120596119894=100381610038161003816100381612059611989411003816100381610038161003816 +100381610038161003816100381612059611989421003816100381610038161003816
(14)
where 119877119894(119890119879
119894119875119894119861119894) = 119899max
119894119895119889119894119895119864119894
Next the decentralized proportional-integral observer(DPIO) as (15) is proposed to simultaneously estimate thesystem states and sensor fault [27]
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + V119894
minus120573119894sgn (119890119879
119894119875119894119861119894)]
+119863119894119891119894119904+ 119870119894119901(119910119894minus 119894)
119894= 119862119894119894
119891119894119904= 119870119894V119862119894 119890119894119909 + 119870119894119897119862119894119890119894119909
(15)
where 120573119894sgn(119890119879119894119875119894119861119894) is a robust term which is utilized to go
against the effects of neural network approximation error onthe observer
Now define the state estimation errors as 119890119894119909= 119909119894minus 119894and
sensor fault estimation errors as 119890119891119894119904= 119891119894119904minus 119891119894119904 where
119894is
the estimation of the state vector 119909119894and 119891
119894119904is the estimation
of the sensor fault 119891119894119904
Combining (6) and (15) the error dynamics are as follows
119890119894119909= 119894minus119909119894= (119860119894minus 119870119901119904119862119894) 119890119894+ 119863119894119890119891119894119904+ 119861119894119898119904
119890119891119894119904= 119891119894119897minus 119891119894119897
= 119891119894119897minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894119909
+ 119870119894V119862119894119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119904
(16)
where
119898119904= [(119891119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119894119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(17)
Note that the augmented estimator will then be of thefollowing form
119890119894119904= 119860119894119904119890119894119904+ 119873119894119904119911119894119904 (18)
where 119890119894119904= [119890119894119909
119890119891119894119904] and
119860119894119904= [
119860119894minus 119870119901119904119862119894
119863119894
119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894) 119870119894V119862119894119863119894
]
119873119894119904= [
119861119894
0
119870119894V119862119894119861119894 119868
] 119911119894119904= [
119898119904
119891119894119904
]
(19)
Lemma4 (see [28]) In the given system the eigenvalues of thesystem are located in a LMI region in the complex plane definedby 119863(119902 119903) which is defined by merging different eigenvaluesconstraints to produce a119863(119902 119903)LMI region inwhich 119902 and 119903 arethe radius and center of the disc region If there exist symmetric
Mathematical Problems in Engineering 5
positive-definite matrices 119875 and 119876 and matrices 119870119894119901 119870119894119897 and
119870119894V as well as the corresponding LMI such that
[[[[[[[
[
11986011
11986012
119875119861119894
0
119860119879
1211986022
119870119894V119862119894119861119894 119868
119875119861119894119870119894V119862119894119861119894 120574119868
10
0 119868 0 1205741198681
]]]]]]]
]
lt 0 (20)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119863
119894+ [119876 (119870
119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119863119894 + (119876119870119894V119862119894119863119894)119879
+ 119868119904
(21)
hold the system is stable and the 119867infin
performance is guaran-teed with an attenuation level 120574
Theorem 5 Based on Lemma 4 given 120574 gt 0 and error systemmodel (18) if there exist symmetric positive-definite matrices 119875and 119876 and matrices 119870
119894119901 119870119894119897 and 119870
119894V as well as matrix LMIsuch that (20) holds then system (18) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171198901198941199041003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941199041003817100381710038171003817
2
+ 119881 (0) (22)
where 1198901198941199042
= int1199051
0
(119890119894119904
119879
119890119894119904)119889119905 119911
1198941199042
= int1199051
0
(119911119894119904
119879
119911119894119904)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the Lyapunov candidate as 119881 = 119890119879
1198941199041198751119890119894119904
combine (16) along with the time derivative of 119881 is given by
= 119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904) 119890119894119904+ 2119890119879
1198941199041198751119873119894119904119911119894119904 (23)
Consider the following index
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904) 119889119905 (24)
Thus
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904+ 119868) 119890
119894119904
+119890119879
1198941199041198751119873119894119911119894119904minus 120574119911119879
119894119904119911119894119904] 119889119905 + 119881 (0)
= int
1199051
0
([
119890119894119904
119911119894119904
]
119879
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894
119873119879
1198941198751
minus1205741198681
][
119890119894119904
119911119894119904
])119889119905
+ 119881 (0)
(25)
Considering that the estimation error is bounded definethe following inequality
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894119904
119873119879
1198941199041198751
minus1205741198681
] lt 0 (26)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119873119894119904= [
119875119861119894
0
119870119894V119862119894119861119894 119868
]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(27)
where 11986011 11986012 and 119860
22are defined in (21) then
int
1199051
0
(119890119879
119894119904119890119894119904) 119889119905 le int
1199051
0
120574119911119879
119894119904119911119894119904119889119905 + 119881 (0) (28)
Inequality (22) can be obtained Therefore the observersatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 5
32 Actuator Fault Observer Design This subsection designsthe actuator fault estimator alongwith the observer driven bythe corrected (sensor fault compensated) output and controlsignalsTherefore the system given in (3) can be converted to
119878119894119891
119894= 119860119894119909119894+ 119861119894
sdot [119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119890119891119894119904
(29)
Equivalently design another DPIO as (30) to simultane-ously estimate the system states and actuator fault
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+V119894minus 120573119894sgn (119890119879
119894119875119894119861119894)]
+119870119894119901(119910119894minus 119894+ 119863119894119890119891119894119904)
119894= 119862119894119894+ 119863119894119890119891119894119904
119891119894119886= 119870119894119897119862119894119890119894119909+ 119870119894V119862119894119890119894119909
(30)
6 Mathematical Problems in Engineering
By using (29) and (30) the error dynamics can be changedas follows
119890119894= 119894minus119909119894
= (119860119894minus 119870119894119901119862119894) 119890119894+ 119870119894119901119863119894119890119891119894119904
+ 119861119894119898119886+ 119861119894119892119894119890119891119894119886
119890119891119894119886= 119891119894119886minus119891119894119886
= 119891119894119886minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894
+ 119870119894V119862119894119870119894119901119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119886
+ 119870119894V119862119894119861119894119892119894119890119891119894119886
(31)
where
119898119886= [(119891
119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(32)
Therefore the augmented estimator will then be of thefollowing form
119890119894119886= 119860119894119886119890119894119886+ 119873119894119886119911119894119886+ 119864119894119886119861119894119898119886 (33)
where 119890119894119886= [119890119894
119890119891119894119886] and
119860119894119886= [
119860119894minus 119870119894119901119862119894
119861119894119892119894
minus119870119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119901119886119862119894) 119870119894V119862119894119861119894119892119894
]
119873119894119886= [
119870119894119901119863119894
0
119870119894V119862119894119870119894119901119863119894 119868
]
119911119894119886= [
119890119891119894119904
119891119894119886
] 119864119894119886= [
119868
119870119894V119862119894]
(34)
Theorem 6 Also based on Lemma 4 given 120574 gt 0 and errorsystem model (31) if there exist symmetric positive-definitematrices 119875 and 119876 and matrices 119870
119875119886 119870119894119886 and 119870V119886 as well as
matrix LMI such that
[[[[[[[[
[
1198601111986012
119875119870119894119901119863119894
0 119875
lowast 11986022119870119894V119862119894119870119894119901119863119894 119868 119870
119894V119862119894
lowast lowast 1205741198681
0 0
lowast lowast lowast 1205741198681
0
lowast lowast lowast lowast 1205741198681
]]]]]]]]
]
lt 0 (35)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119861119894119892119894+ [119876 (minus119870
119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119861119894119892119894 + (119876119870119894V119862119894119861119894119892119894)119879
+ 119868119904
(36)
hold then system (31) is robust asymptotically stable andsatisfies the119867
infinperformance indicator as follows10038171003817100381710038171198901198941198861003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941198861003817100381710038171003817
2
+ 119881 (0) (37)
where 1198901198941198862
= int1199051
0
(119890119894119886
119879
119890119894119886)119889119905 119911
1198941198862
= int1199051
0
(119911119894119886
119879
119911119894119886)119889119905 and 119868
119890
119868119904 and 119868
1are unit matrices
Proof The proof procedure ofTheorem 6 is similar to that ofTheorem 5 here it is omitted
4 Active Decentralized Fault-TolerantController Design
In this section the ADFTC based on dynamic output feed-back is designed to ensure the stability and tracking accuracyof a reconfigurable manipulator with acting actuator andsensor faults concurrently
Considering the faulty subsystem dynamic model (29)the decentralized fault-tolerant controller is designed asfollows
119894119888= 119860119894119888119909119894119888+ 119861119894119888119910119894
119906119894= 119862119894119888119909119894119888+ 119863119894119888119910119894minus 119891119894119886
(38)
Aggregation of (29) and (38) gives the following system
119894119897= 119860119894119897119909119894119897+ 119864119894119897119889119894119897+119882119894119897119861119894
119910119894= 119862119894119897119909119894119897+ 119863119894119897119889119894119897
(39)
where
119909119894119897= [
119909119894
119909119894119888
] 119860119894119897= [
119860119894+ 119861119894119892119894119863119894119888119862119894119861119894119892119894119862119894119888
119861119894119888119862119894
119860119894119888
]
119889119894119897= [
119890119891119894119886
119890119891119894119904
] 119882119894119897= [
119891119894+ ℎ119894
0]
119864119894119897= [
119861119894119892119894119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
119862119894119897= [1198621198940] 119863
119894119897= [0 119863
119894]
(40)
Similarly based on Lemma 4 the existing conditionof dynamic output feedback robust control is given inTheorem 7
Theorem 7 Given 120574 gt 0 and fault subsystems dynamic model(29) if there exist symmetric positive-definite matrices119875 and119876and matrices 119860
119894119888 119861119894119888 119862119894119888 and 119863
119894119888as well as matrix LMI such
that
[[[[[[[[
[
1198601111986012119875119861119894119892119894119875 (119861119894119892119894119863119894119888119863119894) 119875 (119891
119894+ ℎ119894)
119860119879
1211986022
0 119861119894119888119863119894
0
lowast lowast 120574119868 0 0
lowast lowast lowast 120574119868 0
lowast lowast lowast lowast 120574119868
]]]]]]]]
]
lt 0 (41)
Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
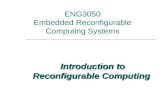
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
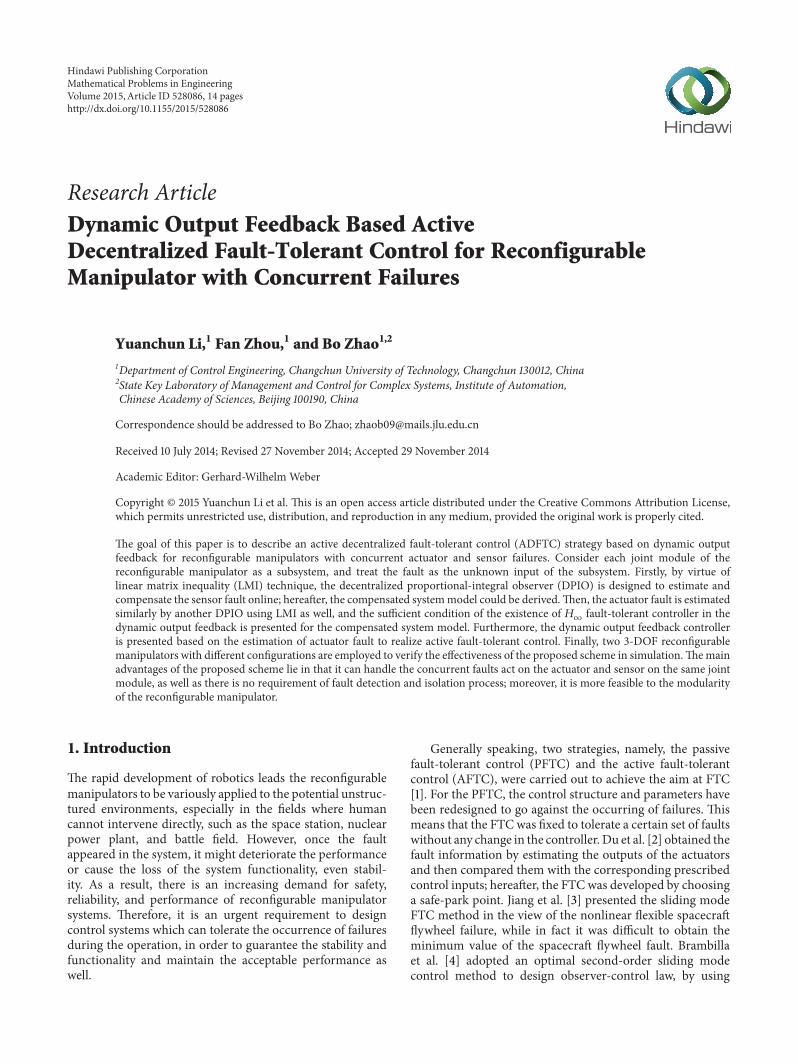
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
the unknown input observer and generalized observer toanalyze residuals but this method can only detect a singlecomponent failure In [5] a decentralized tuning PID outputfeedback controller was utilized to ensure the stability of largeflexible space structures (LFSS) suffered sensor and actuatorfailures Moreover a common solution in the PFTC whensome severe failures are taken into account does not alwaysexist In addition it usually presented a low performanceeven though it exists On the other hand the AFTC maychange the control structure andor parameters to overcomethe bad effect on the whole control systems aroused by thefault Even when necessary it needs to introduce a detectionand estimation module to detect and estimate when thefault occurs Hereafter a supervisory controller should bereconstructed based on the estimated information in the caseof the occurrence of severe faults [6 7] such that it canguarantee the faulty systemrsquos stability and provide acceptablecontrol performance In [8ndash12] only single fault is handledwith AFTC but the concurrent failures on actuator andsensor always occur in actual fact In this regard Rotondo etal [13] used virtual actuator and sensor to correct the actualactuator and sensor faults which achieved the objective ofFTC based on the dynamical controller reconfiguration Samiand Patton [14] proposed a new architecture based on acombination of actuator and sensor Takagi-Sugeno (T-S)proportional state estimators augmented with proportionaland integral feedback (PPI) fault estimators together witha T-S dynamic output feedback control for time-varyingreference tracking
In recent literatures some effort has been made forthe reconfigurable manipulators in fault Yuan et al [15]introduced an energy efficiency monitor approach to detectthe fault where the operation failure was reflected by theefficiency decline of mechanical systemThemeasurement ofeach joint torque is used not only to control the running statebut also to reflect the output capacity The method based ontorque measurement is independent of the whole dynamicmodel of robot systems Ahmad et al [16] presented a dis-tributed fault detection method which can gain the forecasterror through comparing the joint torque signal and torqueestimation being filtered Zhao and Li [17] were concernedwith the active fault-tolerant control problem for reconfig-urablemanipulator actuator based on local joint informationThis scheme processed a simple control structure as well asthe fault could be isolated and tolerated in subsystem and itcan be easily applied to different configurations without anyparameters modification However only a single fault in theactuator or sensor was taken into account to be handled inthe aforementioned methods which limited the availabilityin practice
There are severalmethods successfully used in controllingreconfigurable manipulator In centralized control approachLi et al [18] utilized the elastic parameters of joint modulewhich were identified by fuzzy logic to build finite elementmodel of reconfigurable robot then based on the BP neuralnetwork and genetic algorithm the vibration control methodwas proposed based on the finite element model Sun et al[19] divided 4-DOF module into posture coupled subsys-tems and position feedback subsystem and simultaneously
decomposedworkspace into the above two subspaces to solvethe inverse position problem through forecasting methodBiglarbegian et al [20] presented Type-2 TSK fuzzy logiccontrol method aimed at the reconfigurable manipulatorswith uncertain dynamic parameters This control structurehad a complex and fixed control structure and lackedflexibility thus it was difficult to be implemented to thereconfigurable manipulator when its configuration changedThe other one was distributed control method Muller etal [21] simplified the hardware of control system to ensurethe flexibility of system reconstruction and coordinated tooperate all modular robots through independent centralcontrol Zhu and Lamarche [22] described the system as aset of subsystems through virtual decomposition and thenused the exchange information amongmodules to design thesubsystemrsquos controller The distributed control method canreduce computational complexity and has a more harmo-nious and flexible structure compared to those in centralizedcontrol it makes the system compatibility not only betterbut also more suitable to the concept of modularizationThisdistributed control could conduct more thorough coordinatecontrol however the time delay in communication can resultin imprecise control performance To reduce the difficultyin controller design the decentralized control strategy isdeveloped in a large-scale system In fact the main propertyof the reconfigurable manipulator system lies in differentconfigurations and different degree of freedom Therefore itis more suitable to take a jointmodule as a subsystem and thedecentralized control method can satisfy its main propertyKirchoff and Melek [23] designed a PID robust controllerbased on independent joint information for industrial robotLi [24] introduced a dispersion saturated type of robustcontrol method only considering the single joint dynamicsafter the system was decoupled and treated the influence ofother jointsrsquo dynamics as external disturbanceThe controllerdesign in decentralized control approach utilizes only localinformation thus it is more suitable for the system with anuncertain degree of freedom and different configurations
This paper tries to address an ADFTC for reconfigurablemanipulator with concurrent failures This idea focuses onthe observer design for isolating and estimating the actuatorand sensor faults for the purpose of fault compensation Itdecomposes the entire system into a set of interconnectedsubsystems for developing decentralized control architectureADPIO is designed through using LMI technique to estimateand compensate the sensor fault online and the compen-sated system model is derived Similarly another DPIO isestablished with the sufficient condition of the existence of119867infinfault-tolerant controller and presented in the presence of
the dynamic output feedback Simultaneously the ADFTC isrealized by the estimation of the faults based on the dynamicoutput feedback Finally simulation results show the stabilityand accuracy in the tracking system with simultaneouslyacting actuators and sensors faults
The main advantages of the proposed approach lie inthe following (i) Only local information is used to designthe ADFTC for reconfigurable manipulator with the conceptof decentralized control which can tolerate the concurrentfaults acting in actuator and sensor in an independent joint
Mathematical Problems in Engineering 3
module (ii) LMI technique is used in the design procedure ofDPIOs and dynamic output feedback controller simplifyingthe control structure and making the proof process of systemstability easier on the condition of ensuring the systemstability (iii) There is no requirement of FDI unit here soit saves the reconfiguration time which is necessary in theconventional AFTC (iv) Compared to the existing resultsthe dynamic output feedback is utilized as the state feedbackin the proposed scheme meanwhile it could balance thecontradictions between the irreplaceable state feedback andthe difficulty in physical realization
This paper is presented in the following order Section 2describes nonlinear interconnected subsystem dynamicmodel of the reconfigurable manipulator including thesystems with fault or without fault Section 3 enters into adescription of the observers followed by two subsectionswhich illustrate the stability and performance designconditions for (i) sensor fault estimate observer and (ii)the actuator fault estimate observer In Section 4 thedynamic output feedback controller is designed and itillustrates the stability and performance design conditionsIn Section 5 the effectiveness of the proposed ADFTCmethod is verified by the simulation results of two 3-DOFreconfigurable manipulators with different configurationsSome conclusions are drawn in Section 6
2 Problem Description
For the development of decentralized control consider theentire reconfigurable manipulator with 119899-DOF as a set ofnonlinear interconnected subsystems which are composedof a general joint module And the subsystem 119868 in thereconfigurable manipulator system can be presented by thefollowing state equation [25]
119878119894
119894= 119860119894119909119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) 119906119894+ ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894
(1)
where 119909119894= [1199091198941 1199091198942]119879
= [119902119894 119902119894]119879
(119894 = 1 2 119899) is the statevector of the subsystem 119878
119894and 119910
119894is the output of the sub-
system 119878119894 The matrices
119860119894= [
0 1
0 0] 119861
119894= [
0
1] 119862
119894= [
1 0
0 1]
119891119894(119902119894 119902119894) = 119872
minus1
119894(119902119894) [minus119862119894(119902119894 119902119894) 119902119894minus 119866119894(119902119894)]
119892119894(119902119894) = 119872
minus1
119894(119902119894)
ℎ119894(119902 119902 119902) = minus119872
minus1
119894(119902119894) 119885119894(119902 119902 119902)
(2)
For the subsystem suffering actuator and sensor failuresconcurrently the faulty dynamic model can be expressed as
119878119894119891
119894= 119860119894119909119894+ 119861119894[119892119894(119902119894) (119906119894+ 119891119894119886)
+119891119894(119902119894 119902119894) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119891119894119904
(3)
here 119891119894119886(119902119894 119902119894 119894) denotes the actuator fault function 119863
119894=
[1 0
0 1] is the sensor fault distribution matrix and 119891
119894119904=
[11989111989411990411198911198941199042]119879 satisfies 119891
119894119904 le 120588119894(119905) where 120588
119894(119905) is a continuous
positive-definite functionThe control objective is to design an active decentralized
fault-tolerant controller in order to guarantee the wholeclosed-loop system stability in the case of the system sufferingconcurrent actuator and sensor faults In other words theproposed fault-tolerant control scheme should make theoutputs of the entire system follow the desired trajectorieseven though concurrent faults occur
3 Decentralized Proportional-IntegralObserver Design
31 Sensor Fault Observer Design In this subsection adecentralized proportional-integral observer is designed forthe faulty dynamic model (3) in order to estimate the sensorfault
Assumption 1 The desired trajectories 119902119889119894 119902119889
119894 and 119902
119889
119894are
bounded
Assumption 2 The subsystem actuator fault function119891119894119886(119902119894 119902119894 119894) and the sensor fault function 119891
119894119904are bounded as
119891119894119886 le 119891lowast
119894119886and 119891
1198941199041 le 119891lowast
1198941199041
Introduce a first order filter as [26]
119894= minus119860
119894119886119911119894+ 119861119894119886119910119894 (4)
Next putting the output of (3) into (4) we have
119894= minus119860
119894119886119911119894+ 119861119894119886119862119894119909119894+ 119861119894119886119863119894119891119894119904 (5)
where 119911119894= [11991111989411199111198942]119879 119910119894is the joint position sensor and
velocity sensor output signal and minus119860119894119886isin 1198772times2 is a Hurwitz
matrix with det(119861119894119886) = 0
Combining the states of (3) and (5) it is gained that
119878119894119891
119894= 119860119894119909119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+ℎ119894(119902 119902 119902)] + 119863
119894119891119894119904
119910119894= 119862119894119909119894
(6)
where 119909119894= [119909119894
119911119894] 119860119894= [119860119894 0
119861119894119886119862119894 minus119860119894119886
] 119861119894= [119861119894
0] 119862119894= [0 119868] and
119863119894= [0
119861119894119886119863119894]
Now utilize the RBF neural networks to approximatethe unknown term 119891
119894(119902119894 119902119894) and uncertainty term 119892
119894(119902119894) as
follows
119891119894(119902119894 119902119894119882119894119891) = 119882
119879
119894119891Φ119894119891(119902119894 119902119894) + 120576119894119891
119892119894(119902119894119882119894119892) = 119882
119879
119894119892Φ119894119892(119902119894) + 120576119894119892
(7)
where 119882119894119891
and 119882119894119892
are the ideal neural network weightsrespectively Φ(sdot) is the neural network basis function and120576119894119891
and 120576119894119892
are the neural network approximation errorsrespectively
4 Mathematical Problems in Engineering
Define 119894119891
and 119894119892
as the estimations of 119882119894119891
and119882119894119892 119891119894(119902119894 119902119894 119894119891) and 119892
119894(119902119894 119894119892) expressed as (8) are the
estimations of 119891119894(119902119894 119902119894119882119894119891) and 119892
119894(119902119894119882119894119892) respectively
119891119894(119902119894 119902119894 119879
119894119891) =
119879
119894119891Φ119894119891(119902119894 119902119894)
119892119894(119902119894 119879
119894119892) =
119879
119894119892Φ119894119892(119902119894)
(8)
where the adjustable parameters are updated by the followingadaptive laws
119882119894119891= 120578119894119891119890119879
119894119875119894119861119894Φ119894119891(119902119894 119902119894)
119882119894119892= 120578119894119892119890119879
119894119875119894119861119894Φ119894119892(119902119894) 119906119894
(9)
where 120578119894119891and 120578119894119892are positive constants
Note that a challenge in implementing the decentralizedcontrol is to compensate the coupling torque caused bythe interconnected joint modules In such a scenario thefollowing assumption is presented
Assumption 3 The interconnection term ℎ119894(119902 119902 119902) is
bounded by [25]
1003816100381610038161003816ℎ119894 (119902119902 119902)1003816100381610038161003816 le
119899
sum
119895=1
119889119894119895119864119895 (10)
with 119889119894119895ge 0 and 119864
119895= 1 + 119890
119879
119894119875119894119861119894 + 119890
119879
1198941198751198941198611198942
Similarly another RBF neural network term 119894(119890119879
119894119875119894119861119894
119894119901) is introduced to compensate the effect of interconnec-
tion term and defined as follows
V119894(119905) = minus sgn (119890119879
119894119875119894119861119894) 119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) (11)
Similarly another RBF neural network expressed as (12)is proposed to achieve this goal
119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) =
119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817) (12)
where 119882119894119901
is the ideal neural network weight and Φ119894119901(sdot)
is the neural network basis function 119894119901
and Φ119894119901
are theestimations of 119882
119894119901and Φ
119894119901 respectively
119894119901= 119894119901minus 119882119894119901
and Φ119894119901= Φ119894119901minus Φ119894119901are relative estimation errors And
119894119901
can be updated by
119882119894119901= 120578119894119901
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817Φ119894119901 (13)
also 120578119894119901is a positive constant
Finally define approximation error
1205961198941= 119882119879
119894119891Φ119894119891(119902119894 119902119894) + 119882
119879
119894119892Φ119894119892(119902119894) 119906119894+ 120576119894119891+ 120576119894119892119906119894
1205961198942= 119877119894
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817minus 119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817)
120596119894=100381610038161003816100381612059611989411003816100381610038161003816 +100381610038161003816100381612059611989421003816100381610038161003816
(14)
where 119877119894(119890119879
119894119875119894119861119894) = 119899max
119894119895119889119894119895119864119894
Next the decentralized proportional-integral observer(DPIO) as (15) is proposed to simultaneously estimate thesystem states and sensor fault [27]
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + V119894
minus120573119894sgn (119890119879
119894119875119894119861119894)]
+119863119894119891119894119904+ 119870119894119901(119910119894minus 119894)
119894= 119862119894119894
119891119894119904= 119870119894V119862119894 119890119894119909 + 119870119894119897119862119894119890119894119909
(15)
where 120573119894sgn(119890119879119894119875119894119861119894) is a robust term which is utilized to go
against the effects of neural network approximation error onthe observer
Now define the state estimation errors as 119890119894119909= 119909119894minus 119894and
sensor fault estimation errors as 119890119891119894119904= 119891119894119904minus 119891119894119904 where
119894is
the estimation of the state vector 119909119894and 119891
119894119904is the estimation
of the sensor fault 119891119894119904
Combining (6) and (15) the error dynamics are as follows
119890119894119909= 119894minus119909119894= (119860119894minus 119870119901119904119862119894) 119890119894+ 119863119894119890119891119894119904+ 119861119894119898119904
119890119891119894119904= 119891119894119897minus 119891119894119897
= 119891119894119897minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894119909
+ 119870119894V119862119894119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119904
(16)
where
119898119904= [(119891119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119894119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(17)
Note that the augmented estimator will then be of thefollowing form
119890119894119904= 119860119894119904119890119894119904+ 119873119894119904119911119894119904 (18)
where 119890119894119904= [119890119894119909
119890119891119894119904] and
119860119894119904= [
119860119894minus 119870119901119904119862119894
119863119894
119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894) 119870119894V119862119894119863119894
]
119873119894119904= [
119861119894
0
119870119894V119862119894119861119894 119868
] 119911119894119904= [
119898119904
119891119894119904
]
(19)
Lemma4 (see [28]) In the given system the eigenvalues of thesystem are located in a LMI region in the complex plane definedby 119863(119902 119903) which is defined by merging different eigenvaluesconstraints to produce a119863(119902 119903)LMI region inwhich 119902 and 119903 arethe radius and center of the disc region If there exist symmetric
Mathematical Problems in Engineering 5
positive-definite matrices 119875 and 119876 and matrices 119870119894119901 119870119894119897 and
119870119894V as well as the corresponding LMI such that
[[[[[[[
[
11986011
11986012
119875119861119894
0
119860119879
1211986022
119870119894V119862119894119861119894 119868
119875119861119894119870119894V119862119894119861119894 120574119868
10
0 119868 0 1205741198681
]]]]]]]
]
lt 0 (20)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119863
119894+ [119876 (119870
119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119863119894 + (119876119870119894V119862119894119863119894)119879
+ 119868119904
(21)
hold the system is stable and the 119867infin
performance is guaran-teed with an attenuation level 120574
Theorem 5 Based on Lemma 4 given 120574 gt 0 and error systemmodel (18) if there exist symmetric positive-definite matrices 119875and 119876 and matrices 119870
119894119901 119870119894119897 and 119870
119894V as well as matrix LMIsuch that (20) holds then system (18) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171198901198941199041003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941199041003817100381710038171003817
2
+ 119881 (0) (22)
where 1198901198941199042
= int1199051
0
(119890119894119904
119879
119890119894119904)119889119905 119911
1198941199042
= int1199051
0
(119911119894119904
119879
119911119894119904)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the Lyapunov candidate as 119881 = 119890119879
1198941199041198751119890119894119904
combine (16) along with the time derivative of 119881 is given by
= 119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904) 119890119894119904+ 2119890119879
1198941199041198751119873119894119904119911119894119904 (23)
Consider the following index
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904) 119889119905 (24)
Thus
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904+ 119868) 119890
119894119904
+119890119879
1198941199041198751119873119894119911119894119904minus 120574119911119879
119894119904119911119894119904] 119889119905 + 119881 (0)
= int
1199051
0
([
119890119894119904
119911119894119904
]
119879
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894
119873119879
1198941198751
minus1205741198681
][
119890119894119904
119911119894119904
])119889119905
+ 119881 (0)
(25)
Considering that the estimation error is bounded definethe following inequality
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894119904
119873119879
1198941199041198751
minus1205741198681
] lt 0 (26)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119873119894119904= [
119875119861119894
0
119870119894V119862119894119861119894 119868
]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(27)
where 11986011 11986012 and 119860
22are defined in (21) then
int
1199051
0
(119890119879
119894119904119890119894119904) 119889119905 le int
1199051
0
120574119911119879
119894119904119911119894119904119889119905 + 119881 (0) (28)
Inequality (22) can be obtained Therefore the observersatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 5
32 Actuator Fault Observer Design This subsection designsthe actuator fault estimator alongwith the observer driven bythe corrected (sensor fault compensated) output and controlsignalsTherefore the system given in (3) can be converted to
119878119894119891
119894= 119860119894119909119894+ 119861119894
sdot [119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119890119891119894119904
(29)
Equivalently design another DPIO as (30) to simultane-ously estimate the system states and actuator fault
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+V119894minus 120573119894sgn (119890119879
119894119875119894119861119894)]
+119870119894119901(119910119894minus 119894+ 119863119894119890119891119894119904)
119894= 119862119894119894+ 119863119894119890119891119894119904
119891119894119886= 119870119894119897119862119894119890119894119909+ 119870119894V119862119894119890119894119909
(30)
6 Mathematical Problems in Engineering
By using (29) and (30) the error dynamics can be changedas follows
119890119894= 119894minus119909119894
= (119860119894minus 119870119894119901119862119894) 119890119894+ 119870119894119901119863119894119890119891119894119904
+ 119861119894119898119886+ 119861119894119892119894119890119891119894119886
119890119891119894119886= 119891119894119886minus119891119894119886
= 119891119894119886minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894
+ 119870119894V119862119894119870119894119901119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119886
+ 119870119894V119862119894119861119894119892119894119890119891119894119886
(31)
where
119898119886= [(119891
119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(32)
Therefore the augmented estimator will then be of thefollowing form
119890119894119886= 119860119894119886119890119894119886+ 119873119894119886119911119894119886+ 119864119894119886119861119894119898119886 (33)
where 119890119894119886= [119890119894
119890119891119894119886] and
119860119894119886= [
119860119894minus 119870119894119901119862119894
119861119894119892119894
minus119870119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119901119886119862119894) 119870119894V119862119894119861119894119892119894
]
119873119894119886= [
119870119894119901119863119894
0
119870119894V119862119894119870119894119901119863119894 119868
]
119911119894119886= [
119890119891119894119904
119891119894119886
] 119864119894119886= [
119868
119870119894V119862119894]
(34)
Theorem 6 Also based on Lemma 4 given 120574 gt 0 and errorsystem model (31) if there exist symmetric positive-definitematrices 119875 and 119876 and matrices 119870
119875119886 119870119894119886 and 119870V119886 as well as
matrix LMI such that
[[[[[[[[
[
1198601111986012
119875119870119894119901119863119894
0 119875
lowast 11986022119870119894V119862119894119870119894119901119863119894 119868 119870
119894V119862119894
lowast lowast 1205741198681
0 0
lowast lowast lowast 1205741198681
0
lowast lowast lowast lowast 1205741198681
]]]]]]]]
]
lt 0 (35)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119861119894119892119894+ [119876 (minus119870
119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119861119894119892119894 + (119876119870119894V119862119894119861119894119892119894)119879
+ 119868119904
(36)
hold then system (31) is robust asymptotically stable andsatisfies the119867
infinperformance indicator as follows10038171003817100381710038171198901198941198861003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941198861003817100381710038171003817
2
+ 119881 (0) (37)
where 1198901198941198862
= int1199051
0
(119890119894119886
119879
119890119894119886)119889119905 119911
1198941198862
= int1199051
0
(119911119894119886
119879
119911119894119886)119889119905 and 119868
119890
119868119904 and 119868
1are unit matrices
Proof The proof procedure ofTheorem 6 is similar to that ofTheorem 5 here it is omitted
4 Active Decentralized Fault-TolerantController Design
In this section the ADFTC based on dynamic output feed-back is designed to ensure the stability and tracking accuracyof a reconfigurable manipulator with acting actuator andsensor faults concurrently
Considering the faulty subsystem dynamic model (29)the decentralized fault-tolerant controller is designed asfollows
119894119888= 119860119894119888119909119894119888+ 119861119894119888119910119894
119906119894= 119862119894119888119909119894119888+ 119863119894119888119910119894minus 119891119894119886
(38)
Aggregation of (29) and (38) gives the following system
119894119897= 119860119894119897119909119894119897+ 119864119894119897119889119894119897+119882119894119897119861119894
119910119894= 119862119894119897119909119894119897+ 119863119894119897119889119894119897
(39)
where
119909119894119897= [
119909119894
119909119894119888
] 119860119894119897= [
119860119894+ 119861119894119892119894119863119894119888119862119894119861119894119892119894119862119894119888
119861119894119888119862119894
119860119894119888
]
119889119894119897= [
119890119891119894119886
119890119891119894119904
] 119882119894119897= [
119891119894+ ℎ119894
0]
119864119894119897= [
119861119894119892119894119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
119862119894119897= [1198621198940] 119863
119894119897= [0 119863
119894]
(40)
Similarly based on Lemma 4 the existing conditionof dynamic output feedback robust control is given inTheorem 7
Theorem 7 Given 120574 gt 0 and fault subsystems dynamic model(29) if there exist symmetric positive-definite matrices119875 and119876and matrices 119860
119894119888 119861119894119888 119862119894119888 and 119863
119894119888as well as matrix LMI such
that
[[[[[[[[
[
1198601111986012119875119861119894119892119894119875 (119861119894119892119894119863119894119888119863119894) 119875 (119891
119894+ ℎ119894)
119860119879
1211986022
0 119861119894119888119863119894
0
lowast lowast 120574119868 0 0
lowast lowast lowast 120574119868 0
lowast lowast lowast lowast 120574119868
]]]]]]]]
]
lt 0 (41)
Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
module (ii) LMI technique is used in the design procedure ofDPIOs and dynamic output feedback controller simplifyingthe control structure and making the proof process of systemstability easier on the condition of ensuring the systemstability (iii) There is no requirement of FDI unit here soit saves the reconfiguration time which is necessary in theconventional AFTC (iv) Compared to the existing resultsthe dynamic output feedback is utilized as the state feedbackin the proposed scheme meanwhile it could balance thecontradictions between the irreplaceable state feedback andthe difficulty in physical realization
This paper is presented in the following order Section 2describes nonlinear interconnected subsystem dynamicmodel of the reconfigurable manipulator including thesystems with fault or without fault Section 3 enters into adescription of the observers followed by two subsectionswhich illustrate the stability and performance designconditions for (i) sensor fault estimate observer and (ii)the actuator fault estimate observer In Section 4 thedynamic output feedback controller is designed and itillustrates the stability and performance design conditionsIn Section 5 the effectiveness of the proposed ADFTCmethod is verified by the simulation results of two 3-DOFreconfigurable manipulators with different configurationsSome conclusions are drawn in Section 6
2 Problem Description
For the development of decentralized control consider theentire reconfigurable manipulator with 119899-DOF as a set ofnonlinear interconnected subsystems which are composedof a general joint module And the subsystem 119868 in thereconfigurable manipulator system can be presented by thefollowing state equation [25]
119878119894
119894= 119860119894119909119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) 119906119894+ ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894
(1)
where 119909119894= [1199091198941 1199091198942]119879
= [119902119894 119902119894]119879
(119894 = 1 2 119899) is the statevector of the subsystem 119878
119894and 119910
119894is the output of the sub-
system 119878119894 The matrices
119860119894= [
0 1
0 0] 119861
119894= [
0
1] 119862
119894= [
1 0
0 1]
119891119894(119902119894 119902119894) = 119872
minus1
119894(119902119894) [minus119862119894(119902119894 119902119894) 119902119894minus 119866119894(119902119894)]
119892119894(119902119894) = 119872
minus1
119894(119902119894)
ℎ119894(119902 119902 119902) = minus119872
minus1
119894(119902119894) 119885119894(119902 119902 119902)
(2)
For the subsystem suffering actuator and sensor failuresconcurrently the faulty dynamic model can be expressed as
119878119894119891
119894= 119860119894119909119894+ 119861119894[119892119894(119902119894) (119906119894+ 119891119894119886)
+119891119894(119902119894 119902119894) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119891119894119904
(3)
here 119891119894119886(119902119894 119902119894 119894) denotes the actuator fault function 119863
119894=
[1 0
0 1] is the sensor fault distribution matrix and 119891
119894119904=
[11989111989411990411198911198941199042]119879 satisfies 119891
119894119904 le 120588119894(119905) where 120588
119894(119905) is a continuous
positive-definite functionThe control objective is to design an active decentralized
fault-tolerant controller in order to guarantee the wholeclosed-loop system stability in the case of the system sufferingconcurrent actuator and sensor faults In other words theproposed fault-tolerant control scheme should make theoutputs of the entire system follow the desired trajectorieseven though concurrent faults occur
3 Decentralized Proportional-IntegralObserver Design
31 Sensor Fault Observer Design In this subsection adecentralized proportional-integral observer is designed forthe faulty dynamic model (3) in order to estimate the sensorfault
Assumption 1 The desired trajectories 119902119889119894 119902119889
119894 and 119902
119889
119894are
bounded
Assumption 2 The subsystem actuator fault function119891119894119886(119902119894 119902119894 119894) and the sensor fault function 119891
119894119904are bounded as
119891119894119886 le 119891lowast
119894119886and 119891
1198941199041 le 119891lowast
1198941199041
Introduce a first order filter as [26]
119894= minus119860
119894119886119911119894+ 119861119894119886119910119894 (4)
Next putting the output of (3) into (4) we have
119894= minus119860
119894119886119911119894+ 119861119894119886119862119894119909119894+ 119861119894119886119863119894119891119894119904 (5)
where 119911119894= [11991111989411199111198942]119879 119910119894is the joint position sensor and
velocity sensor output signal and minus119860119894119886isin 1198772times2 is a Hurwitz
matrix with det(119861119894119886) = 0
Combining the states of (3) and (5) it is gained that
119878119894119891
119894= 119860119894119909119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+ℎ119894(119902 119902 119902)] + 119863
119894119891119894119904
119910119894= 119862119894119909119894
(6)
where 119909119894= [119909119894
119911119894] 119860119894= [119860119894 0
119861119894119886119862119894 minus119860119894119886
] 119861119894= [119861119894
0] 119862119894= [0 119868] and
119863119894= [0
119861119894119886119863119894]
Now utilize the RBF neural networks to approximatethe unknown term 119891
119894(119902119894 119902119894) and uncertainty term 119892
119894(119902119894) as
follows
119891119894(119902119894 119902119894119882119894119891) = 119882
119879
119894119891Φ119894119891(119902119894 119902119894) + 120576119894119891
119892119894(119902119894119882119894119892) = 119882
119879
119894119892Φ119894119892(119902119894) + 120576119894119892
(7)
where 119882119894119891
and 119882119894119892
are the ideal neural network weightsrespectively Φ(sdot) is the neural network basis function and120576119894119891
and 120576119894119892
are the neural network approximation errorsrespectively
4 Mathematical Problems in Engineering
Define 119894119891
and 119894119892
as the estimations of 119882119894119891
and119882119894119892 119891119894(119902119894 119902119894 119894119891) and 119892
119894(119902119894 119894119892) expressed as (8) are the
estimations of 119891119894(119902119894 119902119894119882119894119891) and 119892
119894(119902119894119882119894119892) respectively
119891119894(119902119894 119902119894 119879
119894119891) =
119879
119894119891Φ119894119891(119902119894 119902119894)
119892119894(119902119894 119879
119894119892) =
119879
119894119892Φ119894119892(119902119894)
(8)
where the adjustable parameters are updated by the followingadaptive laws
119882119894119891= 120578119894119891119890119879
119894119875119894119861119894Φ119894119891(119902119894 119902119894)
119882119894119892= 120578119894119892119890119879
119894119875119894119861119894Φ119894119892(119902119894) 119906119894
(9)
where 120578119894119891and 120578119894119892are positive constants
Note that a challenge in implementing the decentralizedcontrol is to compensate the coupling torque caused bythe interconnected joint modules In such a scenario thefollowing assumption is presented
Assumption 3 The interconnection term ℎ119894(119902 119902 119902) is
bounded by [25]
1003816100381610038161003816ℎ119894 (119902119902 119902)1003816100381610038161003816 le
119899
sum
119895=1
119889119894119895119864119895 (10)
with 119889119894119895ge 0 and 119864
119895= 1 + 119890
119879
119894119875119894119861119894 + 119890
119879
1198941198751198941198611198942
Similarly another RBF neural network term 119894(119890119879
119894119875119894119861119894
119894119901) is introduced to compensate the effect of interconnec-
tion term and defined as follows
V119894(119905) = minus sgn (119890119879
119894119875119894119861119894) 119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) (11)
Similarly another RBF neural network expressed as (12)is proposed to achieve this goal
119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) =
119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817) (12)
where 119882119894119901
is the ideal neural network weight and Φ119894119901(sdot)
is the neural network basis function 119894119901
and Φ119894119901
are theestimations of 119882
119894119901and Φ
119894119901 respectively
119894119901= 119894119901minus 119882119894119901
and Φ119894119901= Φ119894119901minus Φ119894119901are relative estimation errors And
119894119901
can be updated by
119882119894119901= 120578119894119901
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817Φ119894119901 (13)
also 120578119894119901is a positive constant
Finally define approximation error
1205961198941= 119882119879
119894119891Φ119894119891(119902119894 119902119894) + 119882
119879
119894119892Φ119894119892(119902119894) 119906119894+ 120576119894119891+ 120576119894119892119906119894
1205961198942= 119877119894
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817minus 119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817)
120596119894=100381610038161003816100381612059611989411003816100381610038161003816 +100381610038161003816100381612059611989421003816100381610038161003816
(14)
where 119877119894(119890119879
119894119875119894119861119894) = 119899max
119894119895119889119894119895119864119894
Next the decentralized proportional-integral observer(DPIO) as (15) is proposed to simultaneously estimate thesystem states and sensor fault [27]
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + V119894
minus120573119894sgn (119890119879
119894119875119894119861119894)]
+119863119894119891119894119904+ 119870119894119901(119910119894minus 119894)
119894= 119862119894119894
119891119894119904= 119870119894V119862119894 119890119894119909 + 119870119894119897119862119894119890119894119909
(15)
where 120573119894sgn(119890119879119894119875119894119861119894) is a robust term which is utilized to go
against the effects of neural network approximation error onthe observer
Now define the state estimation errors as 119890119894119909= 119909119894minus 119894and
sensor fault estimation errors as 119890119891119894119904= 119891119894119904minus 119891119894119904 where
119894is
the estimation of the state vector 119909119894and 119891
119894119904is the estimation
of the sensor fault 119891119894119904
Combining (6) and (15) the error dynamics are as follows
119890119894119909= 119894minus119909119894= (119860119894minus 119870119901119904119862119894) 119890119894+ 119863119894119890119891119894119904+ 119861119894119898119904
119890119891119894119904= 119891119894119897minus 119891119894119897
= 119891119894119897minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894119909
+ 119870119894V119862119894119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119904
(16)
where
119898119904= [(119891119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119894119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(17)
Note that the augmented estimator will then be of thefollowing form
119890119894119904= 119860119894119904119890119894119904+ 119873119894119904119911119894119904 (18)
where 119890119894119904= [119890119894119909
119890119891119894119904] and
119860119894119904= [
119860119894minus 119870119901119904119862119894
119863119894
119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894) 119870119894V119862119894119863119894
]
119873119894119904= [
119861119894
0
119870119894V119862119894119861119894 119868
] 119911119894119904= [
119898119904
119891119894119904
]
(19)
Lemma4 (see [28]) In the given system the eigenvalues of thesystem are located in a LMI region in the complex plane definedby 119863(119902 119903) which is defined by merging different eigenvaluesconstraints to produce a119863(119902 119903)LMI region inwhich 119902 and 119903 arethe radius and center of the disc region If there exist symmetric
Mathematical Problems in Engineering 5
positive-definite matrices 119875 and 119876 and matrices 119870119894119901 119870119894119897 and
119870119894V as well as the corresponding LMI such that
[[[[[[[
[
11986011
11986012
119875119861119894
0
119860119879
1211986022
119870119894V119862119894119861119894 119868
119875119861119894119870119894V119862119894119861119894 120574119868
10
0 119868 0 1205741198681
]]]]]]]
]
lt 0 (20)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119863
119894+ [119876 (119870
119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119863119894 + (119876119870119894V119862119894119863119894)119879
+ 119868119904
(21)
hold the system is stable and the 119867infin
performance is guaran-teed with an attenuation level 120574
Theorem 5 Based on Lemma 4 given 120574 gt 0 and error systemmodel (18) if there exist symmetric positive-definite matrices 119875and 119876 and matrices 119870
119894119901 119870119894119897 and 119870
119894V as well as matrix LMIsuch that (20) holds then system (18) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171198901198941199041003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941199041003817100381710038171003817
2
+ 119881 (0) (22)
where 1198901198941199042
= int1199051
0
(119890119894119904
119879
119890119894119904)119889119905 119911
1198941199042
= int1199051
0
(119911119894119904
119879
119911119894119904)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the Lyapunov candidate as 119881 = 119890119879
1198941199041198751119890119894119904
combine (16) along with the time derivative of 119881 is given by
= 119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904) 119890119894119904+ 2119890119879
1198941199041198751119873119894119904119911119894119904 (23)
Consider the following index
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904) 119889119905 (24)
Thus
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904+ 119868) 119890
119894119904
+119890119879
1198941199041198751119873119894119911119894119904minus 120574119911119879
119894119904119911119894119904] 119889119905 + 119881 (0)
= int
1199051
0
([
119890119894119904
119911119894119904
]
119879
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894
119873119879
1198941198751
minus1205741198681
][
119890119894119904
119911119894119904
])119889119905
+ 119881 (0)
(25)
Considering that the estimation error is bounded definethe following inequality
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894119904
119873119879
1198941199041198751
minus1205741198681
] lt 0 (26)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119873119894119904= [
119875119861119894
0
119870119894V119862119894119861119894 119868
]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(27)
where 11986011 11986012 and 119860
22are defined in (21) then
int
1199051
0
(119890119879
119894119904119890119894119904) 119889119905 le int
1199051
0
120574119911119879
119894119904119911119894119904119889119905 + 119881 (0) (28)
Inequality (22) can be obtained Therefore the observersatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 5
32 Actuator Fault Observer Design This subsection designsthe actuator fault estimator alongwith the observer driven bythe corrected (sensor fault compensated) output and controlsignalsTherefore the system given in (3) can be converted to
119878119894119891
119894= 119860119894119909119894+ 119861119894
sdot [119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119890119891119894119904
(29)
Equivalently design another DPIO as (30) to simultane-ously estimate the system states and actuator fault
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+V119894minus 120573119894sgn (119890119879
119894119875119894119861119894)]
+119870119894119901(119910119894minus 119894+ 119863119894119890119891119894119904)
119894= 119862119894119894+ 119863119894119890119891119894119904
119891119894119886= 119870119894119897119862119894119890119894119909+ 119870119894V119862119894119890119894119909
(30)
6 Mathematical Problems in Engineering
By using (29) and (30) the error dynamics can be changedas follows
119890119894= 119894minus119909119894
= (119860119894minus 119870119894119901119862119894) 119890119894+ 119870119894119901119863119894119890119891119894119904
+ 119861119894119898119886+ 119861119894119892119894119890119891119894119886
119890119891119894119886= 119891119894119886minus119891119894119886
= 119891119894119886minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894
+ 119870119894V119862119894119870119894119901119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119886
+ 119870119894V119862119894119861119894119892119894119890119891119894119886
(31)
where
119898119886= [(119891
119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(32)
Therefore the augmented estimator will then be of thefollowing form
119890119894119886= 119860119894119886119890119894119886+ 119873119894119886119911119894119886+ 119864119894119886119861119894119898119886 (33)
where 119890119894119886= [119890119894
119890119891119894119886] and
119860119894119886= [
119860119894minus 119870119894119901119862119894
119861119894119892119894
minus119870119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119901119886119862119894) 119870119894V119862119894119861119894119892119894
]
119873119894119886= [
119870119894119901119863119894
0
119870119894V119862119894119870119894119901119863119894 119868
]
119911119894119886= [
119890119891119894119904
119891119894119886
] 119864119894119886= [
119868
119870119894V119862119894]
(34)
Theorem 6 Also based on Lemma 4 given 120574 gt 0 and errorsystem model (31) if there exist symmetric positive-definitematrices 119875 and 119876 and matrices 119870
119875119886 119870119894119886 and 119870V119886 as well as
matrix LMI such that
[[[[[[[[
[
1198601111986012
119875119870119894119901119863119894
0 119875
lowast 11986022119870119894V119862119894119870119894119901119863119894 119868 119870
119894V119862119894
lowast lowast 1205741198681
0 0
lowast lowast lowast 1205741198681
0
lowast lowast lowast lowast 1205741198681
]]]]]]]]
]
lt 0 (35)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119861119894119892119894+ [119876 (minus119870
119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119861119894119892119894 + (119876119870119894V119862119894119861119894119892119894)119879
+ 119868119904
(36)
hold then system (31) is robust asymptotically stable andsatisfies the119867
infinperformance indicator as follows10038171003817100381710038171198901198941198861003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941198861003817100381710038171003817
2
+ 119881 (0) (37)
where 1198901198941198862
= int1199051
0
(119890119894119886
119879
119890119894119886)119889119905 119911
1198941198862
= int1199051
0
(119911119894119886
119879
119911119894119886)119889119905 and 119868
119890
119868119904 and 119868
1are unit matrices
Proof The proof procedure ofTheorem 6 is similar to that ofTheorem 5 here it is omitted
4 Active Decentralized Fault-TolerantController Design
In this section the ADFTC based on dynamic output feed-back is designed to ensure the stability and tracking accuracyof a reconfigurable manipulator with acting actuator andsensor faults concurrently
Considering the faulty subsystem dynamic model (29)the decentralized fault-tolerant controller is designed asfollows
119894119888= 119860119894119888119909119894119888+ 119861119894119888119910119894
119906119894= 119862119894119888119909119894119888+ 119863119894119888119910119894minus 119891119894119886
(38)
Aggregation of (29) and (38) gives the following system
119894119897= 119860119894119897119909119894119897+ 119864119894119897119889119894119897+119882119894119897119861119894
119910119894= 119862119894119897119909119894119897+ 119863119894119897119889119894119897
(39)
where
119909119894119897= [
119909119894
119909119894119888
] 119860119894119897= [
119860119894+ 119861119894119892119894119863119894119888119862119894119861119894119892119894119862119894119888
119861119894119888119862119894
119860119894119888
]
119889119894119897= [
119890119891119894119886
119890119891119894119904
] 119882119894119897= [
119891119894+ ℎ119894
0]
119864119894119897= [
119861119894119892119894119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
119862119894119897= [1198621198940] 119863
119894119897= [0 119863
119894]
(40)
Similarly based on Lemma 4 the existing conditionof dynamic output feedback robust control is given inTheorem 7
Theorem 7 Given 120574 gt 0 and fault subsystems dynamic model(29) if there exist symmetric positive-definite matrices119875 and119876and matrices 119860
119894119888 119861119894119888 119862119894119888 and 119863
119894119888as well as matrix LMI such
that
[[[[[[[[
[
1198601111986012119875119861119894119892119894119875 (119861119894119892119894119863119894119888119863119894) 119875 (119891
119894+ ℎ119894)
119860119879
1211986022
0 119861119894119888119863119894
0
lowast lowast 120574119868 0 0
lowast lowast lowast 120574119868 0
lowast lowast lowast lowast 120574119868
]]]]]]]]
]
lt 0 (41)
Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Define 119894119891
and 119894119892
as the estimations of 119882119894119891
and119882119894119892 119891119894(119902119894 119902119894 119894119891) and 119892
119894(119902119894 119894119892) expressed as (8) are the
estimations of 119891119894(119902119894 119902119894119882119894119891) and 119892
119894(119902119894119882119894119892) respectively
119891119894(119902119894 119902119894 119879
119894119891) =
119879
119894119891Φ119894119891(119902119894 119902119894)
119892119894(119902119894 119879
119894119892) =
119879
119894119892Φ119894119892(119902119894)
(8)
where the adjustable parameters are updated by the followingadaptive laws
119882119894119891= 120578119894119891119890119879
119894119875119894119861119894Φ119894119891(119902119894 119902119894)
119882119894119892= 120578119894119892119890119879
119894119875119894119861119894Φ119894119892(119902119894) 119906119894
(9)
where 120578119894119891and 120578119894119892are positive constants
Note that a challenge in implementing the decentralizedcontrol is to compensate the coupling torque caused bythe interconnected joint modules In such a scenario thefollowing assumption is presented
Assumption 3 The interconnection term ℎ119894(119902 119902 119902) is
bounded by [25]
1003816100381610038161003816ℎ119894 (119902119902 119902)1003816100381610038161003816 le
119899
sum
119895=1
119889119894119895119864119895 (10)
with 119889119894119895ge 0 and 119864
119895= 1 + 119890
119879
119894119875119894119861119894 + 119890
119879
1198941198751198941198611198942
Similarly another RBF neural network term 119894(119890119879
119894119875119894119861119894
119894119901) is introduced to compensate the effect of interconnec-
tion term and defined as follows
V119894(119905) = minus sgn (119890119879
119894119875119894119861119894) 119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) (11)
Similarly another RBF neural network expressed as (12)is proposed to achieve this goal
119894(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817 119894119901) =
119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817) (12)
where 119882119894119901
is the ideal neural network weight and Φ119894119901(sdot)
is the neural network basis function 119894119901
and Φ119894119901
are theestimations of 119882
119894119901and Φ
119894119901 respectively
119894119901= 119894119901minus 119882119894119901
and Φ119894119901= Φ119894119901minus Φ119894119901are relative estimation errors And
119894119901
can be updated by
119882119894119901= 120578119894119901
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817Φ119894119901 (13)
also 120578119894119901is a positive constant
Finally define approximation error
1205961198941= 119882119879
119894119891Φ119894119891(119902119894 119902119894) + 119882
119879
119894119892Φ119894119892(119902119894) 119906119894+ 120576119894119891+ 120576119894119892119906119894
1205961198942= 119877119894
10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817minus 119879
119894119901Φ119894119901(10038171003817100381710038171003817119890119879
119894119875119894119861119894
10038171003817100381710038171003817)
120596119894=100381610038161003816100381612059611989411003816100381610038161003816 +100381610038161003816100381612059611989421003816100381610038161003816
(14)
where 119877119894(119890119879
119894119875119894119861119894) = 119899max
119894119895119889119894119895119864119894
Next the decentralized proportional-integral observer(DPIO) as (15) is proposed to simultaneously estimate thesystem states and sensor fault [27]
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + V119894
minus120573119894sgn (119890119879
119894119875119894119861119894)]
+119863119894119891119894119904+ 119870119894119901(119910119894minus 119894)
119894= 119862119894119894
119891119894119904= 119870119894V119862119894 119890119894119909 + 119870119894119897119862119894119890119894119909
(15)
where 120573119894sgn(119890119879119894119875119894119861119894) is a robust term which is utilized to go
against the effects of neural network approximation error onthe observer
Now define the state estimation errors as 119890119894119909= 119909119894minus 119894and
sensor fault estimation errors as 119890119891119894119904= 119891119894119904minus 119891119894119904 where
119894is
the estimation of the state vector 119909119894and 119891
119894119904is the estimation
of the sensor fault 119891119894119904
Combining (6) and (15) the error dynamics are as follows
119890119894119909= 119894minus119909119894= (119860119894minus 119870119901119904119862119894) 119890119894+ 119863119894119890119891119894119904+ 119861119894119898119904
119890119891119894119904= 119891119894119897minus 119891119894119897
= 119891119894119897minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894119909
+ 119870119894V119862119894119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119904
(16)
where
119898119904= [(119891119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119894119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(17)
Note that the augmented estimator will then be of thefollowing form
119890119894119904= 119860119894119904119890119894119904+ 119873119894119904119911119894119904 (18)
where 119890119894119904= [119890119894119909
119890119891119894119904] and
119860119894119904= [
119860119894minus 119870119901119904119862119894
119863119894
119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894) 119870119894V119862119894119863119894
]
119873119894119904= [
119861119894
0
119870119894V119862119894119861119894 119868
] 119911119894119904= [
119898119904
119891119894119904
]
(19)
Lemma4 (see [28]) In the given system the eigenvalues of thesystem are located in a LMI region in the complex plane definedby 119863(119902 119903) which is defined by merging different eigenvaluesconstraints to produce a119863(119902 119903)LMI region inwhich 119902 and 119903 arethe radius and center of the disc region If there exist symmetric
Mathematical Problems in Engineering 5
positive-definite matrices 119875 and 119876 and matrices 119870119894119901 119870119894119897 and
119870119894V as well as the corresponding LMI such that
[[[[[[[
[
11986011
11986012
119875119861119894
0
119860119879
1211986022
119870119894V119862119894119861119894 119868
119875119861119894119870119894V119862119894119861119894 120574119868
10
0 119868 0 1205741198681
]]]]]]]
]
lt 0 (20)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119863
119894+ [119876 (119870
119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119863119894 + (119876119870119894V119862119894119863119894)119879
+ 119868119904
(21)
hold the system is stable and the 119867infin
performance is guaran-teed with an attenuation level 120574
Theorem 5 Based on Lemma 4 given 120574 gt 0 and error systemmodel (18) if there exist symmetric positive-definite matrices 119875and 119876 and matrices 119870
119894119901 119870119894119897 and 119870
119894V as well as matrix LMIsuch that (20) holds then system (18) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171198901198941199041003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941199041003817100381710038171003817
2
+ 119881 (0) (22)
where 1198901198941199042
= int1199051
0
(119890119894119904
119879
119890119894119904)119889119905 119911
1198941199042
= int1199051
0
(119911119894119904
119879
119911119894119904)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the Lyapunov candidate as 119881 = 119890119879
1198941199041198751119890119894119904
combine (16) along with the time derivative of 119881 is given by
= 119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904) 119890119894119904+ 2119890119879
1198941199041198751119873119894119904119911119894119904 (23)
Consider the following index
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904) 119889119905 (24)
Thus
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904+ 119868) 119890
119894119904
+119890119879
1198941199041198751119873119894119911119894119904minus 120574119911119879
119894119904119911119894119904] 119889119905 + 119881 (0)
= int
1199051
0
([
119890119894119904
119911119894119904
]
119879
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894
119873119879
1198941198751
minus1205741198681
][
119890119894119904
119911119894119904
])119889119905
+ 119881 (0)
(25)
Considering that the estimation error is bounded definethe following inequality
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894119904
119873119879
1198941199041198751
minus1205741198681
] lt 0 (26)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119873119894119904= [
119875119861119894
0
119870119894V119862119894119861119894 119868
]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(27)
where 11986011 11986012 and 119860
22are defined in (21) then
int
1199051
0
(119890119879
119894119904119890119894119904) 119889119905 le int
1199051
0
120574119911119879
119894119904119911119894119904119889119905 + 119881 (0) (28)
Inequality (22) can be obtained Therefore the observersatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 5
32 Actuator Fault Observer Design This subsection designsthe actuator fault estimator alongwith the observer driven bythe corrected (sensor fault compensated) output and controlsignalsTherefore the system given in (3) can be converted to
119878119894119891
119894= 119860119894119909119894+ 119861119894
sdot [119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119890119891119894119904
(29)
Equivalently design another DPIO as (30) to simultane-ously estimate the system states and actuator fault
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+V119894minus 120573119894sgn (119890119879
119894119875119894119861119894)]
+119870119894119901(119910119894minus 119894+ 119863119894119890119891119894119904)
119894= 119862119894119894+ 119863119894119890119891119894119904
119891119894119886= 119870119894119897119862119894119890119894119909+ 119870119894V119862119894119890119894119909
(30)
6 Mathematical Problems in Engineering
By using (29) and (30) the error dynamics can be changedas follows
119890119894= 119894minus119909119894
= (119860119894minus 119870119894119901119862119894) 119890119894+ 119870119894119901119863119894119890119891119894119904
+ 119861119894119898119886+ 119861119894119892119894119890119891119894119886
119890119891119894119886= 119891119894119886minus119891119894119886
= 119891119894119886minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894
+ 119870119894V119862119894119870119894119901119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119886
+ 119870119894V119862119894119861119894119892119894119890119891119894119886
(31)
where
119898119886= [(119891
119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(32)
Therefore the augmented estimator will then be of thefollowing form
119890119894119886= 119860119894119886119890119894119886+ 119873119894119886119911119894119886+ 119864119894119886119861119894119898119886 (33)
where 119890119894119886= [119890119894
119890119891119894119886] and
119860119894119886= [
119860119894minus 119870119894119901119862119894
119861119894119892119894
minus119870119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119901119886119862119894) 119870119894V119862119894119861119894119892119894
]
119873119894119886= [
119870119894119901119863119894
0
119870119894V119862119894119870119894119901119863119894 119868
]
119911119894119886= [
119890119891119894119904
119891119894119886
] 119864119894119886= [
119868
119870119894V119862119894]
(34)
Theorem 6 Also based on Lemma 4 given 120574 gt 0 and errorsystem model (31) if there exist symmetric positive-definitematrices 119875 and 119876 and matrices 119870
119875119886 119870119894119886 and 119870V119886 as well as
matrix LMI such that
[[[[[[[[
[
1198601111986012
119875119870119894119901119863119894
0 119875
lowast 11986022119870119894V119862119894119870119894119901119863119894 119868 119870
119894V119862119894
lowast lowast 1205741198681
0 0
lowast lowast lowast 1205741198681
0
lowast lowast lowast lowast 1205741198681
]]]]]]]]
]
lt 0 (35)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119861119894119892119894+ [119876 (minus119870
119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119861119894119892119894 + (119876119870119894V119862119894119861119894119892119894)119879
+ 119868119904
(36)
hold then system (31) is robust asymptotically stable andsatisfies the119867
infinperformance indicator as follows10038171003817100381710038171198901198941198861003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941198861003817100381710038171003817
2
+ 119881 (0) (37)
where 1198901198941198862
= int1199051
0
(119890119894119886
119879
119890119894119886)119889119905 119911
1198941198862
= int1199051
0
(119911119894119886
119879
119911119894119886)119889119905 and 119868
119890
119868119904 and 119868
1are unit matrices
Proof The proof procedure ofTheorem 6 is similar to that ofTheorem 5 here it is omitted
4 Active Decentralized Fault-TolerantController Design
In this section the ADFTC based on dynamic output feed-back is designed to ensure the stability and tracking accuracyof a reconfigurable manipulator with acting actuator andsensor faults concurrently
Considering the faulty subsystem dynamic model (29)the decentralized fault-tolerant controller is designed asfollows
119894119888= 119860119894119888119909119894119888+ 119861119894119888119910119894
119906119894= 119862119894119888119909119894119888+ 119863119894119888119910119894minus 119891119894119886
(38)
Aggregation of (29) and (38) gives the following system
119894119897= 119860119894119897119909119894119897+ 119864119894119897119889119894119897+119882119894119897119861119894
119910119894= 119862119894119897119909119894119897+ 119863119894119897119889119894119897
(39)
where
119909119894119897= [
119909119894
119909119894119888
] 119860119894119897= [
119860119894+ 119861119894119892119894119863119894119888119862119894119861119894119892119894119862119894119888
119861119894119888119862119894
119860119894119888
]
119889119894119897= [
119890119891119894119886
119890119891119894119904
] 119882119894119897= [
119891119894+ ℎ119894
0]
119864119894119897= [
119861119894119892119894119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
119862119894119897= [1198621198940] 119863
119894119897= [0 119863
119894]
(40)
Similarly based on Lemma 4 the existing conditionof dynamic output feedback robust control is given inTheorem 7
Theorem 7 Given 120574 gt 0 and fault subsystems dynamic model(29) if there exist symmetric positive-definite matrices119875 and119876and matrices 119860
119894119888 119861119894119888 119862119894119888 and 119863
119894119888as well as matrix LMI such
that
[[[[[[[[
[
1198601111986012119875119861119894119892119894119875 (119861119894119892119894119863119894119888119863119894) 119875 (119891
119894+ ℎ119894)
119860119879
1211986022
0 119861119894119888119863119894
0
lowast lowast 120574119868 0 0
lowast lowast lowast 120574119868 0
lowast lowast lowast lowast 120574119868
]]]]]]]]
]
lt 0 (41)
Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
positive-definite matrices 119875 and 119876 and matrices 119870119894119901 119870119894119897 and
119870119894V as well as the corresponding LMI such that
[[[[[[[
[
11986011
11986012
119875119861119894
0
119860119879
1211986022
119870119894V119862119894119861119894 119868
119875119861119894119870119894V119862119894119861119894 120574119868
10
0 119868 0 1205741198681
]]]]]]]
]
lt 0 (20)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119863
119894+ [119876 (119870
119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119863119894 + (119876119870119894V119862119894119863119894)119879
+ 119868119904
(21)
hold the system is stable and the 119867infin
performance is guaran-teed with an attenuation level 120574
Theorem 5 Based on Lemma 4 given 120574 gt 0 and error systemmodel (18) if there exist symmetric positive-definite matrices 119875and 119876 and matrices 119870
119894119901 119870119894119897 and 119870
119894V as well as matrix LMIsuch that (20) holds then system (18) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171198901198941199041003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941199041003817100381710038171003817
2
+ 119881 (0) (22)
where 1198901198941199042
= int1199051
0
(119890119894119904
119879
119890119894119904)119889119905 119911
1198941199042
= int1199051
0
(119911119894119904
119879
119911119894119904)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the Lyapunov candidate as 119881 = 119890119879
1198941199041198751119890119894119904
combine (16) along with the time derivative of 119881 is given by
= 119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904) 119890119894119904+ 2119890119879
1198941199041198751119873119894119904119911119894119904 (23)
Consider the following index
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904) 119889119905 (24)
Thus
119869 = int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119890119879
119894119904119890119894119904minus 120574119911119879
119894119904119911119894119904+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119890119879
119894119904(119860119879
1198941199041198751+ 1198751119860119894119904+ 119868) 119890
119894119904
+119890119879
1198941199041198751119873119894119911119894119904minus 120574119911119879
119894119904119911119894119904] 119889119905 + 119881 (0)
= int
1199051
0
([
119890119894119904
119911119894119904
]
119879
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894
119873119879
1198941198751
minus1205741198681
][
119890119894119904
119911119894119904
])119889119905
+ 119881 (0)
(25)
Considering that the estimation error is bounded definethe following inequality
[
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 119875
1119873119894119904
119873119879
1198941199041198751
minus1205741198681
] lt 0 (26)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119873119894119904= [
119875119861119894
0
119870119894V119862119894119861119894 119868
]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(27)
where 11986011 11986012 and 119860
22are defined in (21) then
int
1199051
0
(119890119879
119894119904119890119894119904) 119889119905 le int
1199051
0
120574119911119879
119894119904119911119894119904119889119905 + 119881 (0) (28)
Inequality (22) can be obtained Therefore the observersatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 5
32 Actuator Fault Observer Design This subsection designsthe actuator fault estimator alongwith the observer driven bythe corrected (sensor fault compensated) output and controlsignalsTherefore the system given in (3) can be converted to
119878119894119891
119894= 119860119894119909119894+ 119861119894
sdot [119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886) + ℎ119894(119902 119902 119902)]
119910119894= 119862119894119909119894+ 119863119894119890119891119894119904
(29)
Equivalently design another DPIO as (30) to simultane-ously estimate the system states and actuator fault
119878119894119891
119909119894= 119860119894119894+ 119861119894[119891119894(119902119894 119902119894) + 119892119894(119902119894) (119906119894+ 119891119894119886)
+V119894minus 120573119894sgn (119890119879
119894119875119894119861119894)]
+119870119894119901(119910119894minus 119894+ 119863119894119890119891119894119904)
119894= 119862119894119894+ 119863119894119890119891119894119904
119891119894119886= 119870119894119897119862119894119890119894119909+ 119870119894V119862119894119890119894119909
(30)
6 Mathematical Problems in Engineering
By using (29) and (30) the error dynamics can be changedas follows
119890119894= 119894minus119909119894
= (119860119894minus 119870119894119901119862119894) 119890119894+ 119870119894119901119863119894119890119891119894119904
+ 119861119894119898119886+ 119861119894119892119894119890119891119894119886
119890119891119894119886= 119891119894119886minus119891119894119886
= 119891119894119886minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894
+ 119870119894V119862119894119870119894119901119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119886
+ 119870119894V119862119894119861119894119892119894119890119891119894119886
(31)
where
119898119886= [(119891
119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(32)
Therefore the augmented estimator will then be of thefollowing form
119890119894119886= 119860119894119886119890119894119886+ 119873119894119886119911119894119886+ 119864119894119886119861119894119898119886 (33)
where 119890119894119886= [119890119894
119890119891119894119886] and
119860119894119886= [
119860119894minus 119870119894119901119862119894
119861119894119892119894
minus119870119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119901119886119862119894) 119870119894V119862119894119861119894119892119894
]
119873119894119886= [
119870119894119901119863119894
0
119870119894V119862119894119870119894119901119863119894 119868
]
119911119894119886= [
119890119891119894119904
119891119894119886
] 119864119894119886= [
119868
119870119894V119862119894]
(34)
Theorem 6 Also based on Lemma 4 given 120574 gt 0 and errorsystem model (31) if there exist symmetric positive-definitematrices 119875 and 119876 and matrices 119870
119875119886 119870119894119886 and 119870V119886 as well as
matrix LMI such that
[[[[[[[[
[
1198601111986012
119875119870119894119901119863119894
0 119875
lowast 11986022119870119894V119862119894119870119894119901119863119894 119868 119870
119894V119862119894
lowast lowast 1205741198681
0 0
lowast lowast lowast 1205741198681
0
lowast lowast lowast lowast 1205741198681
]]]]]]]]
]
lt 0 (35)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119861119894119892119894+ [119876 (minus119870
119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119861119894119892119894 + (119876119870119894V119862119894119861119894119892119894)119879
+ 119868119904
(36)
hold then system (31) is robust asymptotically stable andsatisfies the119867
infinperformance indicator as follows10038171003817100381710038171198901198941198861003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941198861003817100381710038171003817
2
+ 119881 (0) (37)
where 1198901198941198862
= int1199051
0
(119890119894119886
119879
119890119894119886)119889119905 119911
1198941198862
= int1199051
0
(119911119894119886
119879
119911119894119886)119889119905 and 119868
119890
119868119904 and 119868
1are unit matrices
Proof The proof procedure ofTheorem 6 is similar to that ofTheorem 5 here it is omitted
4 Active Decentralized Fault-TolerantController Design
In this section the ADFTC based on dynamic output feed-back is designed to ensure the stability and tracking accuracyof a reconfigurable manipulator with acting actuator andsensor faults concurrently
Considering the faulty subsystem dynamic model (29)the decentralized fault-tolerant controller is designed asfollows
119894119888= 119860119894119888119909119894119888+ 119861119894119888119910119894
119906119894= 119862119894119888119909119894119888+ 119863119894119888119910119894minus 119891119894119886
(38)
Aggregation of (29) and (38) gives the following system
119894119897= 119860119894119897119909119894119897+ 119864119894119897119889119894119897+119882119894119897119861119894
119910119894= 119862119894119897119909119894119897+ 119863119894119897119889119894119897
(39)
where
119909119894119897= [
119909119894
119909119894119888
] 119860119894119897= [
119860119894+ 119861119894119892119894119863119894119888119862119894119861119894119892119894119862119894119888
119861119894119888119862119894
119860119894119888
]
119889119894119897= [
119890119891119894119886
119890119891119894119904
] 119882119894119897= [
119891119894+ ℎ119894
0]
119864119894119897= [
119861119894119892119894119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
119862119894119897= [1198621198940] 119863
119894119897= [0 119863
119894]
(40)
Similarly based on Lemma 4 the existing conditionof dynamic output feedback robust control is given inTheorem 7
Theorem 7 Given 120574 gt 0 and fault subsystems dynamic model(29) if there exist symmetric positive-definite matrices119875 and119876and matrices 119860
119894119888 119861119894119888 119862119894119888 and 119863
119894119888as well as matrix LMI such
that
[[[[[[[[
[
1198601111986012119875119861119894119892119894119875 (119861119894119892119894119863119894119888119863119894) 119875 (119891
119894+ ℎ119894)
119860119879
1211986022
0 119861119894119888119863119894
0
lowast lowast 120574119868 0 0
lowast lowast lowast 120574119868 0
lowast lowast lowast lowast 120574119868
]]]]]]]]
]
lt 0 (41)
Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
By using (29) and (30) the error dynamics can be changedas follows
119890119894= 119894minus119909119894
= (119860119894minus 119870119894119901119862119894) 119890119894+ 119870119894119901119863119894119890119891119894119904
+ 119861119894119898119886+ 119861119894119892119894119890119891119894119886
119890119891119894119886= 119891119894119886minus119891119894119886
= 119891119894119886minus [119870119894119897119862119894+ 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894)] 119890119894
+ 119870119894V119862119894119870119894119901119863119894119890119891119894119904 + 119870119894V119862119894119861119894119898119886
+ 119870119894V119862119894119861119894119892119894119890119891119894119886
(31)
where
119898119886= [(119891
119894minus 119891119894) + (119892
119894minus 119892119894) (119906119894+ 119891119886)
minusV119894+ ℎ119894+ 120573119894sgn (119890119879
119894119875119894119861119894)]
(32)
Therefore the augmented estimator will then be of thefollowing form
119890119894119886= 119860119894119886119890119894119886+ 119873119894119886119911119894119886+ 119864119894119886119861119894119898119886 (33)
where 119890119894119886= [119890119894
119890119891119894119886] and
119860119894119886= [
119860119894minus 119870119894119901119862119894
119861119894119892119894
minus119870119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119901119886119862119894) 119870119894V119862119894119861119894119892119894
]
119873119894119886= [
119870119894119901119863119894
0
119870119894V119862119894119870119894119901119863119894 119868
]
119911119894119886= [
119890119891119894119904
119891119894119886
] 119864119894119886= [
119868
119870119894V119862119894]
(34)
Theorem 6 Also based on Lemma 4 given 120574 gt 0 and errorsystem model (31) if there exist symmetric positive-definitematrices 119875 and 119876 and matrices 119870
119875119886 119870119894119886 and 119870V119886 as well as
matrix LMI such that
[[[[[[[[
[
1198601111986012
119875119870119894119901119863119894
0 119875
lowast 11986022119870119894V119862119894119870119894119901119863119894 119868 119870
119894V119862119894
lowast lowast 1205741198681
0 0
lowast lowast lowast 1205741198681
0
lowast lowast lowast lowast 1205741198681
]]]]]]]]
]
lt 0 (35)
where
11986011= 119875119860119894+ 119860119879
119894119875 minus 119875119870
119894119901119862119894minus (119875119870
119894119901119862)119879
+ 119868119890
11986012= 119875119861119894119892119894+ [119876 (minus119870
119894119897119862119894minus 119870119894V119862119894 (119860119894 minus 119870119894119901119862119894))]
119879
11986022= 119876119870
119894V119862119894119861119894119892119894 + (119876119870119894V119862119894119861119894119892119894)119879
+ 119868119904
(36)
hold then system (31) is robust asymptotically stable andsatisfies the119867
infinperformance indicator as follows10038171003817100381710038171198901198941198861003817100381710038171003817
2
le 12057410038171003817100381710038171199111198941198861003817100381710038171003817
2
+ 119881 (0) (37)
where 1198901198941198862
= int1199051
0
(119890119894119886
119879
119890119894119886)119889119905 119911
1198941198862
= int1199051
0
(119911119894119886
119879
119911119894119886)119889119905 and 119868
119890
119868119904 and 119868
1are unit matrices
Proof The proof procedure ofTheorem 6 is similar to that ofTheorem 5 here it is omitted
4 Active Decentralized Fault-TolerantController Design
In this section the ADFTC based on dynamic output feed-back is designed to ensure the stability and tracking accuracyof a reconfigurable manipulator with acting actuator andsensor faults concurrently
Considering the faulty subsystem dynamic model (29)the decentralized fault-tolerant controller is designed asfollows
119894119888= 119860119894119888119909119894119888+ 119861119894119888119910119894
119906119894= 119862119894119888119909119894119888+ 119863119894119888119910119894minus 119891119894119886
(38)
Aggregation of (29) and (38) gives the following system
119894119897= 119860119894119897119909119894119897+ 119864119894119897119889119894119897+119882119894119897119861119894
119910119894= 119862119894119897119909119894119897+ 119863119894119897119889119894119897
(39)
where
119909119894119897= [
119909119894
119909119894119888
] 119860119894119897= [
119860119894+ 119861119894119892119894119863119894119888119862119894119861119894119892119894119862119894119888
119861119894119888119862119894
119860119894119888
]
119889119894119897= [
119890119891119894119886
119890119891119894119904
] 119882119894119897= [
119891119894+ ℎ119894
0]
119864119894119897= [
119861119894119892119894119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
119862119894119897= [1198621198940] 119863
119894119897= [0 119863
119894]
(40)
Similarly based on Lemma 4 the existing conditionof dynamic output feedback robust control is given inTheorem 7
Theorem 7 Given 120574 gt 0 and fault subsystems dynamic model(29) if there exist symmetric positive-definite matrices119875 and119876and matrices 119860
119894119888 119861119894119888 119862119894119888 and 119863
119894119888as well as matrix LMI such
that
[[[[[[[[
[
1198601111986012119875119861119894119892119894119875 (119861119894119892119894119863119894119888119863119894) 119875 (119891
119894+ ℎ119894)
119860119879
1211986022
0 119861119894119888119863119894
0
lowast lowast 120574119868 0 0
lowast lowast lowast 120574119868 0
lowast lowast lowast lowast 120574119868
]]]]]]]]
]
lt 0 (41)
Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
where
11986011= 119875119860119894+ 119860119879
119894119875 + 119875119861
119894119892119894119863119894119888119862119894
+ (119875119861119894119892119894119863119894119888119862119894)119879
+ 119868119890
11986012= 119875119861119894119892119894119862119894119888+ (119876119861
119894119888119862119894)119879
11986022= 119876119860
119894119888+ (119876119860
119894119888)119879
+ 119868119904
(42)
hold then the closed-loop system (39) is robust asymptoticallystable and satisfies the119867
infinperformance indicator as follows
10038171003817100381710038171199091198941198971003817100381710038171003817
2
le 12057410038171003817100381710038171198891198941003817100381710038171003817
2
+ 119881 (0) (43)
where 1199091198941198972
= int1199051
0
(119909119894119897
119879
119909119894119897)119889119905 119889
1198942
= int1199051
0
(119889119894
119879
119889119894)119889119905 and 119868
119890 119868119904
and 1198681are unit matrices
Proof Choosing the candidate function 119881 = 1199091198791198941198971198751119909119894119897 along
with the trajectories of (39) is then given by
= 119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897) 119909119894119897+ 119909119879
1198941198971198751119864119894119897119889119894
+ 119889119879
119894119864119879
1198941198971198751119909119894119897+ 2119909119879
1198941198971198751119882119894119897119861119894
(44)
Given the index
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119897119889119894119897) 119889119905 (45)
thus
119869 = int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus int
1199051
0
119889119905
= int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 minus 119881 (119905
1) + 119881 (0)
le int
1199051
0
(119909119879
119894119897119909119894119897minus 120574119889119879
119894119889119894119897+ ) 119889119905 + 119881 (0)
= int
1199051
0
[119909119879
119894119897(119860119879
1198941198971198751+ 1198751119860119894119897+ 119868) 119909
119894119897
+ 119909119879
1198941198971198751119864119894119897119889119894+ 119889119879
119894119864119879
1198941198971198751119909119894119897
+ 2119909119879
1198941198971198751119882119894119897119861119894minus 120574119889119879
119894119889119894] 119889119905 + 119881 (0)
= int
1199051
0
(
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
119879
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
sdot
[[[
[
119909119894119897
119889119894
119861119894
]]]
]
)119889119905 + 119881 (0)
(46)
Considering that estimation error is bounded define thefollowing inequality
[[[
[
119860119879
1198941198971198751+ 1198751119860119894119897+ 119868 119875
11198641198941198971198751119882119894119897
1198751119864119879
119894119897minus1205741198681
0
1198751119882119879
1198941198970 minus120574119868
1
]]]
]
lt 0 (47)
Next define symmetric positive-definite matrix 1198751=
[119875 0
0 119868] then
1198751119864119894119897= [
119875119861119894119892119894119875119861119894119892119894119863119894119888119863119894
0 119861119894119888119863119894
]
1198751119882119894119897= [
119875 (119891119894+ ℎ119894)
0]
119860119879
1198941199041198751+ 1198751119860119894119904+ 119868 = [
1198601111986012
119860119879
1211986022
]
(48)
where 11986011 11986012 and 119860
22are defined in (42) then
int
1199051
0
(119909119879
119894119897119909119894119897) 119889119905 le int
1199051
0
120574119889119879
119894119889119894119889119905 + 119881 (0) (49)
Inequality (43) can be obtained Therefore the systemsatisfies the119867
infinperformance indicator and this completes the
proof of Theorem 7
5 Simulation Results
To verify the effectiveness of the proposed ADFTC strategyin this subsection two 3-DOF reconfigurable manipulatorswith different configurations shown in Figure 1 are employedto illustrate the simulation results
The initial position and velocity are set as 1199021(0) = 119902
2(0) =
1199023(0) = 1 and 119902
1(0) = 119902
2(0) = 119902
3(0) = 0 respectively
By solving the LMI conditions given in 1 2 and 3 thedynamic output feedback controller and observer gains are
1198601119888=
[[[[[
[
17261 29781 44521 63562
11781 21535 33562 53070
minus10682 minus15344 45082 51247
minus09344 minus14606 31247 41075
]]]]]
]
1198602119888=
[[[[[
[
10261 28531 40951 59062
11141 20031 31639 50250
minus10009 minus13614 41163 49428
minus08314 minus12171 27319 40014
]]]]]
]
8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
I[1]
I[2]
I[2]
I[2]
I[2]
I[2]
O[2]
O[2]
O[2]O[2]
O[2]O[2]
L[0]
L[0]
L[1]L[0]
L[0]
L[1]
L[3]
L[3]
T
T
BB
Configuration bConfiguration a
Figure 1 Configurations of 3-DOF reconfigurable manipulators
1198603119888=
[[[[[
[
09841 20781 40194 58376
10781 19535 30062 49030
minus09718 minus10981 35462 50007
minus09004 minus09261 29654 99612
]]]]]
]
1198611119888=
[[[[[
[
215639 404866 404866 208926
29584 minus228672 270025 441431
249533 57852 minus82747 193143
minus59514 132063 388838 348115
]]]]]
]
1198612119888=
[[[[[
[
211543 400039 398753 200034
27635 minus220753 265025 439471
246494 50735 minus80415 190001
minus56401 129083 381307 340671
]]]]]
]
1198613119888=
[[[[[
[
209680 401496 394986 205639
26835 minus220681 264517 431931
242583 51327 minus80017 189153
minus53454 128963 380818 339911
]]]]]
]
1198621119888= [07261 minus10665 minus09665 03214]
1198622119888= [03274 minus07765 minus05665 02341]
1198623119888= [00661 minus01735 minus00913 00648]
1198631119888= [26557 minus19799 minus20486 51928]
1198632119888= [19471 minus10006 minus20936 49718]
1198633119888= [09557 minus08799 minus10486 31928]
(50)
The sensor fault observer gains are calculated as
1198701119901=
[[[[[[
[
minus142064 99445 85239 113651
05600 minus124741 106921 142561
74114 51880 44468 minus59291
36582 25608 21949 minus29266
]]]]]]
]
1198702119901=
[[[[[[
[
minus122064 86255 79152 108921
04725 minus110031 98513 129151
64164 51880 43518 minus4831
26532 19375 21949 minus20216
]]]]]]
]
1198703119901=
[[[[[[
[
minus122257 86415 79514 103621
04651 minus124741 106921 142561
69416 49480 39723 minus53611
22418 15308 20009 minus25136
]]]]]]
]
1198701V = [105289 51970 132071 65190]
1198702V = [104079 41870 129731 60520]
1198703V = [99539 40940 128070 59510]
1198701119897= [75289 31970 82071 55190]
1198702119897= [65636 30070 79872 50079]
1198703119897= [65258 29963 72547 49130]
(51)
Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
0 1 2 3 4 5 6 7 8 9 10
0
2
4
6
8
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimated fault
minus8
minus6
minus4
minus2
(a)
0 1 2 3 4 5 6 7 8 9 10
0
02
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimated fault
minus04
minus02
(b)
0 1 2 3 4 5 6 7 8 9 10
0
05
1
15
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor faults compensation trajectory
minus15
minus1
minus05
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Time (s)
Join
t 3 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensation trajectory
minus08
minus06
minus04
minus02
(f)
Figure 2 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 3 p
ositi
on (r
ad)
minus1
minus05
minus08
minus06
minus04
minus02
minus06
minus04
minus02
Figure 3 The tolerant tracking performance of configuration 119886
The actuator fault observer gains are calculated as
1198701119901=
[[[[[[
[
271343 minus224461 157691 08612
40364 01558 177803 11852
141557 117100 82266 minus129699
69872 57800 40606 minus64019
]]]]]]
]
1198702119901=
[[[[[[
[
258643 minus204813 125191 07132
40374 01098 137013 10352
13977 117100 80136 minus119819
58924 51320 39836 minus53419
]]]]]]
]
1198703119901=
[[[[[[
[
221463 minus204001 117251 0702112
40364 09958 129803 09562
138937 117100 82266 minus129699
58924 50972 39001 minus52919
]]]]]]
]
1198701V = [65289 31970 52071 65190]
1198702V = [60963 30023 51325 62351]
1198703V = [59235 28971 50701 61180]
1198701119897= [50231 35576 75657 64152]
1198702119897= [49421 30893 71097 62321]
1198703119897= [48511 29416 65725 60757]
(52)
Here the control law (39) is applied to the whole controlsystem and the control parameters are selected as 120578
119894119891= 0002
120578119894119892= 0002 and 120578
119894119901= 500 and the 119867
infinperformance
indicator is defined as 120574 = 10First considering configuration 119886 fault signals are added
to the actuators of joint 1 the position sensor of joint 2 andboth velocity sensor and actuator of joint 3 at 119905 = 3 s 119905 = 5 s119905 = 6 s and 119905 = 3 s respectively
Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 1 ac
tuat
or fa
ult r
econ
struc
tion
(rad
)
Actuator faultEstimatede fault
minus1
minus05
(a)
0 1 2 3 4 5 6 7 8 9 10
0
5
Time (s)
Join
t 2 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus5
(b)
0 1 2 3 4 5 6 7 8 9 10
002040608
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryWithout sensor fault compensatsion trajectory
minus1
minus08
minus06
minus04
minus02
(c)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
Time (s)
Join
t 3 ac
uato
r fau
lt re
cons
truc
tion
(rad
)
Actuator faultEstimated fault
(d)
0 1 2 3 4 5 6 7 8 9 10
0
01
02
03
04
Time (s)
Join
t 3 se
nsor
faul
t rec
onstr
uctio
n (r
ad)
Sensor faultEstimatede fault
minus04
minus03
minus02
minus01
(e)
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Without sensor fault compensation trajectoryDesired trajectory
minus04
minus02
(f)
Figure 4 (a) Actuator fault estimation of joint 1 (b) sensor fault estimation of joint 2 (c) tracking performance with uncompensated sensorfault of joint 2 (d) actuator fault estimation of joint 3 (e) sensor fault estimation of joint 3 (f) tracking performance with uncompensatedsensor fault of joint 3
12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
08
1
Time (s)
Join
t 1 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
05
1
Time (s)
Join
t 2 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
0 1 2 3 4 5 6 7 8 9 10
0
02
04
06
Time (s)
Join
t 3 p
ositi
on (r
ad)
Desired trajectoryActual trajectory
minus06
minus04
minus02
minus1
minus05
minus04
minus02
Figure 5 The tolerant tracking performance of configuration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
5 sin (1199021) 1199021 119905 gt 3
1198912119904=
0 119905 le 5
minus03 cos (1199022) 119905 gt 5
1198913119886=
0 119905 le 3
15 119905 gt 3
1198913119904=
0 119905 le 6
minus031199022 119905 gt 6
(53)
As illustrated in Figure 2 from Figures 2(a) 2(b) 2(d)and 2(e) it can be obtained that the sensor faults and actuatorfaults can be detected online in real time when the faultsoccur via DPIO and the actual trajectory cannot track thedesired trajectory due to without sensor fault compensationfrom Figures 2(c) and 2(f) Figure 3 shows the tolerant
tracking performance of configuration 119886 in which it canbe seen that the actual trajectories can follow the desiredtrajectories in each joint
To further test the effectiveness of the proposed schemeunder different configurations the same scheme applies toconfiguration 119887
The fault functions are as follows
1198911119886=
0 119905 le 3
2 sin (1199021) 119905 gt 3
1198912119904=
0 119905 le 5
3 sin (119905) 119905 gt 5
1198913119886=
0 119905 le 6
20 119905 gt 6
1198913119904=
0 119905 le 4
minus051199022 119905 gt 4
(54)
Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
The simulation results are shown as in Figures 4 and 5 thatillustrate that the proposed active decentralized fault-tolerantcontrol can be applied to different configurations of reconfig-urable manipulator without any parameters modification
6 Conclusion
The paper develops a novel tolerant control strategy forreconfigurable manipulator with simultaneous actuator andsensor faults based on dynamic output feedback controlUsing LMI technology the DPIO is designed to estimate andcompensate the actuator and sensor faults on line and theestimator of actuator fault is put into the designed dynamicoutput feedback controller to realize active fault-tolerantcontrol The method obviates the disturbance of time delayfor system by cancelling the need for the use of a faultdiagnosis and isolation (FDI) unit and the controller not onlycan make fault system robust stability but also can meet therequirement of119867
infinperformance indicatorsThe effectiveness
of the proposed scheme is verified under the conditions ofdifferent configurations without modifying any parameter
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Thiswork is supported by theNational Natural Science Foun-dation of China under Grants 61374051 and 60974010 andthe Scientific and Technological Development Plan Project inJilin Province of China under Grant 20150520112JH
References
[1] D Rupp G Ducard E Shafai and H P Geering ldquoExtendedmultiple model adaptive estimation for the detection of sensorand actuator faultsrdquo in Proceedings of the 44th IEEE Conferenceon Decision and Control and the European Control Conference(CDC-ECC rsquo05) pp 3079ndash3084 December 2005
[2] M Du J Nease and P Mhaskar ldquoAn integrated fault diagnosisand safe-parking framework for fault-tolerant control of non-linear systemsrdquo International Journal of Robust and NonlinearControl vol 22 no 1 pp 105ndash122 2012
[3] Y Jiang Q Hu and G Ma ldquoAdaptive backstepping fault-tolerant control for flexible spacecraft with unknown boundeddisturbances and actuator failuresrdquo ISATransactions vol 49 no1 pp 57ndash69 2010
[4] D Brambilla L M Capisani A Ferrara and P Pisu ldquoSecondorder sliding mode observers for fault detection of robotmanipulatorsrdquo in Proceedings of the 47th IEEE Conferenceon Decision and Control (CDC rsquo08) pp 2949ndash2954 CancunMexico December 2008
[5] S T Huang E J Davison and R Kwong ldquoDecentralizedrobust servomechanism problem for large flexible space struc-tures under sensor and actuator failuresrdquo IEEE Transactions onAutomatic Control vol 57 no 12 pp 3219ndash3224 2012
[6] J Jiang and Y Zhang ldquoAccepting performance degradationin fault-tolerant control system designrdquo IEEE Transactions onControl Systems Technology vol 14 no 2 pp 284ndash292 2006
[7] L Liu Y Shen E H Dowell and C Zhu ldquoA general 119867infin
fault tolerant control and management for a linear system withactuator faultsrdquo Automatica vol 48 no 8 pp 1676ndash1682 2012
[8] H H Niemann ldquoA model-based approach to fault-tolerantcontrolrdquo International Journal of Applied Mathematics andComputer Science vol 22 no 1 pp 67ndash86 2012
[9] J C D Silva A Saxena E Balaban and K Goebel ldquoAknowledge-based system approach for sensor fault modelingdetection andmitigationrdquo Expert Systems with Applications vol39 no 12 pp 10977ndash10989 2012
[10] M Petkovic M R Rapaic Z D Jelicic and A Pisano ldquoOn-lineadaptive clustering for process monitoring and fault detectionrdquoExpert SystemswithApplications vol 39 no 11 pp 10226ndash102352012
[11] Y Xu S Tong and Y Li ldquoAdaptive fuzzy fault-tolerant controlof static var compensator based on dynamic surface controltechniquerdquo Nonlinear Dynamics vol 73 no 3 pp 2013ndash20232013
[12] S J Yoo ldquoActuator fault detection and adaptive accommodationcontrol of flexible-joint robotsrdquo IET Control Theory and Appli-cations vol 6 no 10 pp 1497ndash1507 2012
[13] D Rotondo F Nejjari and V Puig ldquoA virtual actuator andsensor approach for fault tolerant control of LPV systemsrdquoJournal of Process Control vol 24 no 3 pp 203ndash222 2014
[14] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[15] J Yuan G Liu and B Wu ldquoPower efficiency estimation-basedhealth monitoring and fault detection of modular and reconfig-urable robotrdquo IEEE Transactions on Industrial Electronics vol58 no 10 pp 4880ndash4887 2011
[16] S AhmadH Zhang andG Liu ldquoDistributed fault detection formodular and reconfigurable robots with joint torque sensing aprediction error based approachrdquo Mechatronics vol 23 no 6pp 607ndash616 2013
[17] B Zhao and Y Li ldquoLocal joint information based activefault tolerant control for reconfigurablemanipulatorrdquoNonlinearDynamics vol 77 no 3 pp 859ndash876 2014
[18] Y Li Y Liu X Liu and Z Peng ldquoParameter identificationand vibration control in modular manipulatorsrdquo IEEEASMETransactions on Mechatronics vol 9 no 4 pp 700ndash705 2004
[19] T Sun Y M Song Y G Li and J Zhang ldquoWorkspacedecomposition based dimensional synthesis of a novel hybridreconfigurable robotrdquo Journal of Mechanisms and Robotics vol2 no 3 Article ID 031009 8 pages 2010
[20] M Biglarbegian W W Melek and J M Mendel ldquoDesign ofnovel interval type-2 fuzzy controllers for modular and recon-figurable robots theory and experimentsrdquo IEEETransactions onIndustrial Electronics vol 58 no 4 pp 1371ndash1384 2011
[21] RMuller M Esser M Jansen and B Corves ldquoModular controlsystem for reconfigurable robot applicationsrdquo in Proceedings ofthe IEEE International Symposium on Assembly and Manufac-turing pp 1ndash5 May 2011
[22] W-H Zhu and T Lamarche ldquoModular robot manipulatorsbased on virtual decomposition controlrdquo in Proceedings of theIEEE International Conference on Robotics and Automation(ICRA rsquo07) pp 2235ndash2240 Rome Italy April 2007
14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
[23] S Kirchoff and W W Melek ldquoA saturation-type robust con-troller for modular manipulators armsrdquo Mechatronics vol 17no 4-5 pp 175ndash190 2007
[24] Z LiDevelopment and Control of aModular and ReconfigurableRobot with Harmonic Drive Transmission System University ofWaterloo Waterloo Canada 2007
[25] B Zhao and Y Li ldquoMultisensor fault identification schemebased on decentralized sliding mode observers applied toreconfigurable manipulatorsrdquo Mathematical Problems in Engi-neering vol 2013 Article ID 327916 9 pages 2013
[26] R N Murray Z X Li and S S Sastry A MathematicalIntroduction to Robotic Manipulation CRC Press Boca RatonFla USA 1994
[27] M Sami and R J Patton ldquoActive fault tolerant control for non-linear systems with simultaneous actuator and sensor faultsrdquoInternational Journal of Control Automation and Systems vol11 no 6 pp 1149ndash1161 2013
[28] L Bai Z Tian and S Shi ldquoRobust fault detection for a class ofnonlinear time-delay systemsrdquo Journal of the Franklin Institutevol 344 no 6 pp 873ndash888 2007
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of