Research Article Distributed Kalman-Consensus Filtering...
8
Research Article Distributed Kalman-Consensus Filtering for Sparse Signal Estimation Yisha Liu, 1 Haiyang Yu, 2 and Jian Wang 3 1 School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China 2 Research Center of Information and Control, Dalian University of Technology, Dalian 116024, China 3 China Nuclear Power Technology Research Institute Beijing Division, Beijing 100872, China Correspondence should be addressed to Haiyang Yu; [email protected] Received 24 December 2013; Accepted 21 February 2014; Published 23 March 2014 Academic Editor: Ge Guo Copyright © 2014 Yisha Liu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A Kalman filtering-based distributed algorithm is proposed to deal with the sparse signal estimation problem. e pseudomeasurement-embedded Kalman filter is rebuilt in the information form, and an improved parameter selection approach is discussed. By introducing the pseudomeasurement technology into Kalman-consensus filter, a distributed estimation algorithm is developed to fuse the measurements from different nodes in the network, such that all filters can reach a consensus on the estimate of sparse signals. Some numerical examples are provided to demonstrate the effectiveness of the proposed approach. 1. Introduction In the past few years, the problems of sparse signal recovery have received a great deal of attention since the emergence of the new signal sampling theory which is known as com- pressed sampling or compressed sensing [1–3]. Using fewer observations than what is required in the Shannon sample principle, sparse signals can be recovered with overwhelming probability through solving a 1-norm minimization problem. A variety of approaches have been developed for this convex optimization problem, for example, Least Absolute Shrinkage and Selection Operator (LASSO), Basis Pursuit Denoising (BPDN), and Dantzig Selector (DS). Recently, many researchers have attempted to deal with the sparse signal recovery problem in the classic framework of signal estimation, such as the Kalman filter. In fact, the traditional Kalman filter is not effective for the sparse signals estimation [4]; therefore some improved approaches were proposed. In [5], the problem of reconstructing time sequences of spatially sparse signals was considered. Com- pressed sensing was used to estimate the support set of the initial signal’s transform vector, and a reduced-order Kalman filter was designed to recover the signal. Based on a pseudomeasurement technology of the underlying constrained optimization problem, Carmi et al. proposed a new Kalman filtering approach for the recovery of possibly time-varying sparse signals in [6]. In [7], an algorithm based on a hierarchical probabilistic model was proposed, which used reweighted ℓ 1 minimization as its core computation and propagated second order statistics through time similar to the classic Kalman filtering. Encouraged by the exciting progress on sensor networks and multiagent systems, the distributed technology is having an important role in many fields, such as communication, multirobot systems, and production scheduling. Recently, the study of the distributed estimation or filtering has attracted considerable research interests, and some results have been reported in the literature. In [8, 9], a diffusion strategy was established for the design of distributed Kalman filtering and smoothing, in which nodes communicate with their direct neighbors only, and the information is diffused across the network through a sequence of Kalman iterations and data aggregation. A class of diffusion LMS strategies was proposed for distributed estimation over adaptive networks in [10]. ese methods can make the network with the ability to learn the sparse structure from the incoming data in real time and also track variations in the sparsity of the model. Recently, the consensus protocol has been introduced into distributed Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 138146, 7 pages http://dx.doi.org/10.1155/2014/138146
Transcript of Research Article Distributed Kalman-Consensus Filtering...

Research ArticleDistributed Kalman-Consensus Filtering forSparse Signal Estimation
Yisha Liu1 Haiyang Yu2 and Jian Wang3
1 School of Information Science and Technology Dalian Maritime University Dalian 116026 China2 Research Center of Information and Control Dalian University of Technology Dalian 116024 China3 China Nuclear Power Technology Research Institute Beijing Division Beijing 100872 China
Correspondence should be addressed to Haiyang Yu yuhaiyang08gmailcom
Received 24 December 2013 Accepted 21 February 2014 Published 23 March 2014
Academic Editor Ge Guo
Copyright copy 2014 Yisha Liu et alThis is an open access article distributed under the Creative CommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
A Kalman filtering-based distributed algorithm is proposed to deal with the sparse signal estimation problem Thepseudomeasurement-embedded Kalman filter is rebuilt in the information form and an improved parameter selection approach isdiscussed By introducing the pseudomeasurement technology into Kalman-consensus filter a distributed estimation algorithm isdeveloped to fuse the measurements from different nodes in the network such that all filters can reach a consensus on the estimateof sparse signals Some numerical examples are provided to demonstrate the effectiveness of the proposed approach
1 Introduction
In the past few years the problems of sparse signal recoveryhave received a great deal of attention since the emergenceof the new signal sampling theory which is known as com-pressed sampling or compressed sensing [1ndash3] Using fewerobservations than what is required in the Shannon sampleprinciple sparse signals can be recovered with overwhelmingprobability through solving a 1-normminimization problemA variety of approaches have been developed for this convexoptimization problem for example Least Absolute Shrinkageand Selection Operator (LASSO) Basis Pursuit Denoising(BPDN) and Dantzig Selector (DS)
Recently many researchers have attempted to deal withthe sparse signal recovery problem in the classic frameworkof signal estimation such as the Kalman filter In factthe traditional Kalman filter is not effective for the sparsesignals estimation [4] therefore some improved approacheswere proposed In [5] the problem of reconstructing timesequences of spatially sparse signals was considered Com-pressed sensing was used to estimate the support set ofthe initial signalrsquos transform vector and a reduced-orderKalman filter was designed to recover the signal Basedon a pseudomeasurement technology of the underlying
constrained optimization problem Carmi et al proposed anew Kalman filtering approach for the recovery of possiblytime-varying sparse signals in [6] In [7] an algorithm basedon a hierarchical probabilistic model was proposed whichused reweighted ℓ
1minimization as its core computation and
propagated second order statistics through time similar to theclassic Kalman filtering
Encouraged by the exciting progress on sensor networksand multiagent systems the distributed technology is havingan important role in many fields such as communicationmultirobot systems and production scheduling Recently thestudy of the distributed estimation or filtering has attractedconsiderable research interests and some results have beenreported in the literature In [8 9] a diffusion strategy wasestablished for the design of distributed Kalman filtering andsmoothing in which nodes communicate with their directneighbors only and the information is diffused across thenetwork through a sequence of Kalman iterations and dataaggregation A class of diffusion LMS strategies was proposedfor distributed estimation over adaptive networks in [10]Thesemethods canmake the network with the ability to learnthe sparse structure from the incoming data in real time andalso track variations in the sparsity of the model Recentlythe consensus protocol has been introduced into distributed
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 138146 7 pageshttpdxdoiorg1011552014138146
2 Mathematical Problems in Engineering
filtering problems In [11] three types of distributed Kalmanfiltering algorithms were proposed A distributed high-passfilter was used to fuse the local sensor measurements basedon average consensus such that the nodes in sensor networktrack the average measurement of the overall network Thealgorithms were established based on the information formof Kalman filter and the analysis of stability and performanceof the Kalman-consensus filter was provided in [12]
In this paper we aim to develop a distributed filteringmethod to estimate a sparse signal using somemeasurementsfrom a sensor network The proposed method is establishedby means of the Kalman-consensus filter and the pseu-domeasurement technology The remainder of this paper isorganized as follows Section 2 gives a brief overview of thebasic problems in compressed sampling and summarizes theKalman filter with embedded pseudomeasurement equationA dynamic parameter selection strategy is discussed aswell to improve the performance In Section 3 the Kalmanfiltering with embedded pseudomeasurement is rebuilt inthe information form The pseudomeasurement equation isintroduced into the Kalman-consensus filter to develop adistributed sparse signal estimation algorithm Simulationresults are given in Section 4 to demonstrate the effectivenessof the proposed method Some concluding remarks areprovided in Section 5
Notation The notation used here is fairly standard exceptwhere otherwise stated R denotes the set of real numbersand R119899 denotes the 119899 dimensional Euclidean space whoseelements are 119899 times 1 column vectors The support set of119909 isin R119899 is defined as Supp119909 = 119894 | 119909(119894) = 0 and 119909
0
is the cardinality of Supp119909 The 1-norm and 2-norm of119909 are defined as 119909
1= sum119899
119894=1|119909(119894)| and 119909
2= radic119909119879119909
respectively sign(sdot) is the sign function E[120585] stands for themathematical expectation of random variable 120585 N(120583 120590
2)
stands for normal distribution with mean 120583 and variance1205902 Uint[119886 119887] represents the integer uniform distribution
in the interval [119886 119887] Tr119860 denotes the trace of matrix 119860119860119865
= radicTr119860119860119879 is the Frobenius norm of matrix 119860kec119909
1 119909
119899 = [119909
119879
1sdot sdot sdot 119909119879
119899]119879
diag1198601 119860
119899 denotes
a block-diagonal matrix whose diagonal blocks are givenby 1198601 119860
119899 119878 ⪰ 0 means a real symmetric matrix 119878 is
semidefinite
2 Sparse Signal Estimation UsingKalman Filter
This section briefly overviews some basic concepts in com-pressed sensing and the method proposed in [6] In orderto recover a sparse signal a pseudomeasurement equation isembedded into the classic Kalman filter Some more detailscan be found in [1 6 13]
21 Sparse Signals Recovery Consider a signal 119909 isin R119899 119909is sparse if 119909
0is much less than 119899 Moreover 119909 is called
119904-sparse if 1199090
= 119904 Assume that 119909119896infin
119896=0is an unknown
sparse discrete-time process in R119899 119909119896evolves according to
the following dynamic model
119909119896+1
= 119860119896119909119896+ 119908119896 (1)
where 119860119896isin R119899times119899 is the state transition matrix 119908
119896infin
119896=0is a
zero-mean white Gaussian sequence with covariance 119876119896⪰ 0
and 1199090sim N(120583
0 1198750) The 119898-dimensional linear measurement
of 119909119896is
119910119896= 119867119896119909119896+ V119896 (2)
where119867119896isin R119898times119899 is the measurement matrix and V
119896infin
119896=0is a
zero-mean white Gaussian sequence with covariance 119877119896⪰ 0
The scenariowe are interested in is the underdetermined casethat is when119898 lt 119899
As shown in [1 13] 119909119896can be accurately recovered by
solving the following optimization problem
min119909119896isinR119899
100381710038171003817100381711990911989610038171003817100381710038170 st 1003817100381710038171003817119910119896 minus 119867
119896119909119896
1003817100381710038171003817
2
2le 120576 (3)
But the optimization problem (3) is NP-hard and cannotbe solved effectively Fortunately it has been proved in [1]that if the measurement matrix 119867
119896obeys the so-called
Restricted Isometry Property (RIP) the solution of (3) canbe obtained with overwhelming probability by solving thefollowing convex optimization problem
min119909119896isinR119899
100381710038171003817100381711990911989610038171003817100381710038171 st 1003817100381710038171003817119910119896 minus 119867
119896119909119896
1003817100381710038171003817
2
2le 120576 (4)
For 119904-sparse signal 119909 isin R119899 only on the order of 119898 = 119904 log 119899samples are needed to reconstruct it
22 Sparse Signal Estimation Using Kalman Filter with Pseu-domeasurement For the system given in (1) and (2) theclassic Kalman filter can provide an estimate of 119909
119896which is
the solution of the following unconstrained ℓ2minimization
problem
min119909119896isinR119899
E119909119896|1199101 119910119896
[1003817100381710038171003817119909119896 minus 119909
119896
1003817100381710038171003817
2
2] (5)
In [6] Carmi et al have discussed the stochastic case of (4)
min119909119896isinR119899
100381710038171003817100381711990911989610038171003817100381710038171 st E
119909119896|1199101 119910119896[1003817100381710038171003817119909119896 minus 119909
119896
1003817100381710038171003817
2
2] le 120576 (6)
and its dual problem
min119909119896isinR119899
E119909119896|1199101 119910119896
[1003817100381710038171003817119909119896 minus 119909
119896
1003817100381710038171003817
2
2] st 1003817100381710038171003817119909119896
10038171003817100381710038171 le 1205761015840 (7)
By constructing a pseudomeasurement equation
0 = 119896119909119896minus 1205761015840 (8)
where 119896= sign(119909119879
119896) 1205761015840 is the fictitious measurement noise
assumed to obey N(0 1205902) and the constrained optimization
problem (7) can be solved in the framework of Kalmanfilter The specific method has been summarized as CSKF-1algorithm in [6]
Mathematical Problems in Engineering 3
In pseudomeasurement equation (8) the measurementmatrix
119896is state dependent and it can be approximated by
119896
= sign(119909119879119896|119896minus1
) The divergence of this approximationhas been discussed by Theorem 1 in [14] Furthermore 120590is a tunable parameter which determines the tightness ofthe constraint on 1-norm of the state estimate 119909 In [14]the authors have proved that the performance of CSKF-1algorithm can be improved by increasing parameter 120590 andthe pseudomeasurement update time 119903 However a big 120590
means a loose constraint on sparseness and thus leads toslow convergence On the contrary a tiny 120590 can result in fastconvergence but there is a big overshoot at the beginningand an enormous steady-state error Therefore in this paperwe employ a dynamic parameter 120590 which increases over timefroma specific initial value for example set1205902 = 119886+119887119896 where119886 determines the initial convergence rate and 119887 determinesthe increase rate of parameter 120590 By selecting the parameters119886 and 119887 properly the convergence rate and the steady-stateerror of CSKF-1 algorithm can be significantly improvedThe effectiveness will be demonstrated by an example inSection 4
3 Distributed Sparse Signal Estimation
Kalman-consensus filter (KCF) is a distributed estimationalgorithm in sensor networks proposed in [11] A detailedanalysis on its stability and performance is given in [12]The KCF is developed based on the information form ofKalman filter by attaching a consensus update structure onthe measurement update procedure In this section CSKF-1 algorithm will be rebuilt in the information form ofKalman filter and the pseudomeasurement technology willbe embedded in the KCF to develop a distributed sparsesignal estimation algorithm in sensor networks
Consider a sensor networkwhose topology is representedby an undirected graphG = (VEA) of order119873with the setof nodesV = 1 2 119873 the set of edges E sube V timesV andthe adjacency matrix A = [119886
119894119895] with nonnegative adjacency
element 119886119894119895 An edge ofG is denoted by unordered pair (119894 119895)
The adjacency elements associatedwith the edges of the graphare positive that is 119886
119894119895gt 0 hArr (119894 119895) isin E The node 119895 is
called a neighbor of node 119894 if (119894 119895) isin E and 119895 = 119894 The setof neighbors of node 119894 is denoted by N
119894 Assume that G is
strongly connectedAssume that the measurement of sensor node 119894 is in
accordance with the linear model (2) Denote 119910119894119896
= [119910119894119896
0]
119867119894119896
= [119867119894119896
119896
] and V119894119896
= [V1198941198961205761015840
119894
] We can get the followingaugmented measurement equation of sensor 119894
119910119894119896
= 119867119894119896119909119896+ V119894119896 (9)
where 119867119894119896
is the measurement matrix of sensor 119894 V119894119896
is zero-mean Gaussian white noise with covariance 119877119894119896
119896
= sign(119909119879119896) and 120576
1015840
119894is the fictitious measurement noise
which obeys N(0 1205902
119894) Defining the global measurement
Y119896
= kec1199101119896 119910
119873119896 V119896
= kecV1119896 V
119873119896 H119896
=
kec1198671119896 119867
119873119896 andR
119896= diag119877
1119896 119877
119873119896 we have
Y119896= H119896119909119896+V119896 (10)
The state estimates of (1) from Kalman filter based onY1 Y
119896 can be defined as
119909119896|119896minus1
= E 119909119896| Y1 Y
119896minus1
119909119896|119896
= E 119909119896| Y1 Y
119896
(11)
and the estimate error covariance matrices can be obtainedby
119875119896|119896minus1
= E (119909119896minus 119909119896|119896minus1
) (119909119896minus 119909119896|119896minus1
)119879
| Y1 Y
119896minus1
119875119896|119896
= E (119909119896minus 119909119896|119896
) (119909119896minus 119909119896|119896
)119879
| Y1 Y
119896
(12)
The inverses of estimate error covariance matrices Σ119896|119896minus1
=
119875minus1
119896|119896minus1and Σ
119896|119896= 119875minus1
119896|119896 are known as information matrices
According to the information form of Kalman filter defining
119911119896= H119879
119896Rminus1
119896Y119896=
119873
sum
119894=1
119867119879
119894119896119877minus1
119894119896119910119894119896 (13)
119878119896= H119879
119896Rminus1
119896H119896=
119873
sum
119894=1
119867119879
119894119896119877minus1
119894119896119867119894119896
+
119873
sum
119894=1
120590minus1
119894Ω119896 (14)
whereΩ119896= sign(119909
119896)sign(119909119879
119896) we can get
Σ119896|119896
= Σ119896|119896minus1
+ 119878119896 (15)
The state estimate from the filter is
119909119896|119896
= 119909119896|119896minus1
+ Σminus1
119896|119896(119911119896minus 119878119896119909119896|119896minus1
) (16)
and the time update procedure is
119909119896+1|119896
= 119860119896119909119896|119896
(17)
Σminus1
119896+1|119896= 119860119896Σminus1
119896|119896119860119879
119896+ 119876119896 (18)
Equations (13)ndash(18) have defined the Kalman informationfilter with embedded pseudomeasurement
Remark 1 From (14) and (15) it is obvious that the intro-duction of pseudomeasurement equation impacts on theevolution of state error covariance by the sparseness ofstate since TrΩ
119896= 1199091198960 As mentioned in Section 2 Ω
119896
will be approximated by Ω119896
= sign(119909119896|119896minus1
)sign(119909119879119896|119896minus1
) inapplications
Based on the conclusion of Theorem 2 in [12] we canconstruct the following Kalman-consensus information filter
4 Mathematical Problems in EngineeringMagnitude
Magnitude
Magnitude
50 100 150 200 250
Magnitude
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
100
minus10
100
minus10
100
minus10
100
minus10
x
x with 1205902 = 500
x with 1205902 = 80
x with 1205902 = 10 + 19k
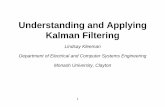
Figure 1 Sparse signal 119909 and its estimate 119909 using CSKF-1 algorithmwith different 1205902
with embedded pseudomeasurement (KCIF-PM) on eachnode in the network
119911119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119910119895119896 (19)
119878119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119867119895119896
+ sum
119895isinN119894
120590minus1
119895Ω119896 (20)
Σ119894119896|119896
= Σ119894119896|119896minus1
+ 119878119894119896 (21)
119909119894119896|119896
= 119909119894119896|119896minus1
+ Σminus1
119894119896|119896(119911119894119896
minus 119878119894119896119909119894119896|119896minus1
)
+ 120574119894Σminus1
119894119896|119896minus1sum
119895isinN119894
(119909119895119896|119896minus1
minus 119909119894119896|119896minus1
) (22)
119909119894119896+1|119896
= 119860119896119909119894119896|119896
(23)
Σminus1
119894119896+1|119896= 119860119896Σminus1
119894119896|119896119860119879
119896+ 119876119896 (24)
where 120574119894= 120598(1 + Σ
minus1
119894119896|119896minus1119865) and 120598 is a tunable parameter
which determines the weight of the consensus update suchthat the error dynamics is globally asymptotically stable andall filters asymptotically reach a consensus on state estimatesthat is 119909
1= 1199092= sdot sdot sdot = 119909
119873
Remark 2 Theglobal sensingmatrixH119896is assumed to satisfy
the Restricted Isometry Property and the 119898-dimensionalglobal measurement Y
119896is obtained through the sensor
network It is important that for any one node in the networkthere is no constraint on the dimension of its measurementwhich means it can be less than the lower bound 119904 log 119899
Even though each node can only get a one-dimensionalmeasurement we can still recover the signal as long as theglobal measurement meets the lower bound and there areenough communications between nodesThis will be verifiedby an example in the next section
Remark 3 Unlike CSKF-1 algorithm there are no iterativepseudomeasurement updates in the filter This procedureis implemented simultaneously with the consensus updateduring the communications between the nodes in thenetwork
The intact version of the algorithm given by (19)ndash(24) issummarized as Algorithm 1
4 Illustrative Examples
In this section we will verify the effectiveness of the methodsproposed in the previous sections by some numerical exam-ples
41 Sparse Signal Estimation Using CSKF-1 with DynamicParameter 120590
2 In this part we will test CSKF-1 algorithmwith two constant parameters 1205902 and a dynamic parameter1205902 which varies according to a linear function of time Here
we attempt to estimate a static sparse signal 119909 isin R256which is 10 sparse For system (1) we have 119860 = 119868
256and
119876119896
= 0 The index 119894 in Supp119909 and the values of 119909(119894)
are unknown The sparse signal 119909 is generated by creatingthe support set from 119894 sim Uint[1 256] and setting the value119909(119894) sim N(0 5) The sensing matrix 119867 isin R72times256 consisted ofentries sampled according to N(0 172) This type of matrixhas been shown to satisfy the Restricted Isometry Propertywith overwhelming probability The measurement noise isV sim N(0 001
2times 11986872) Set 119909
0= 0 define the a posteriori
estimation error 119890119896
= 119909 minus 119909119896|119896 The parameter 1205902 is set to
be 500 80 and 10 + 19119896 respectively The results are shownin Figures 1 and 2 The actual signal 119909 and its estimates withparameter 1205902 = 500 80 and 10 + 19119896 are shown in Figure 1respectively It is evident that the best estimate of 119909 can beobtained with the dynamic parameter 1205902 = 10 + 19119896 Theevolutions of 119909
1and 119890
2are shown in Figure 2 These
results imply that the dynamic parameter 120590 with properlyselected 119886 and 119887 can lead to superior performance of CSKF-1algorithm on both the rate of convergence and the steady-state error
42 Sparse Signal EstimationUsing KCIF-PM inGrid TopologyNetwork In this part we will estimate a sparse signal usingAlgorithm 1 and all of measurements are obtained through asensor network Without loss of generality consider a sensornetwork with 6 nodes as shown in Figure 3 whose topologyis represented by an undirected graph G = (VEA) withthe set of nodes V = 1 2 3 4 5 6 the set of edges E =
(1 2) (1 3) (2 3) (2 4) (2 5) (3 5) (3 6) (4 5) (5 6)and the adjacency matrix
Mathematical Problems in Engineering 5
(1) Set Σ1198941|0
= 119875minus1
0 1199091198941|0
= 1205830
(2) for 119896 = 1 2 3 do(3) Compute 119906
119894119896= 119867119879
119894119896119877119894119896119910119894119896and 119880
119894119896= 119867119879
119894119896119877119894119896119867119894119896
+ 120590minus1
119894Ω119894119896
(4) Send [119909119894119896|119896minus1
119906119894119896 119880119894119896] to node 119895 isin N
119894
(5) Receive [119909119895119896|119896minus1
119906119895119896 119880119895119896] from node 119895 isin N
119894
(6) Fuse local information using (19) and (20)(7) Compute measurement update using (21) and (22)(8) Compute time update using (23) and (24)(9) end for
Algorithm 1 KCIF-PM
10 20 30 40 50 60 70 80050100150
1-no
rm
05101520
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1 with 1205902= 500
x1 with 1205902= 80
x1 with 1205902= 10 + 19k
x1
e2 with 1205902= 500
e2 with 1205902= 80
e2 with 1205902= 10 + 19k
Figure 2 The evolutions of 1199091and 119890
2with different 1205902
1
2 3
4 5 6
Figure 3 Topology structure of the sensor network
A =
[[[[[[[
[
1 1 1 0 0 0
1 1 1 1 1 0
1 1 1 0 1 1
0 1 0 1 1 0
0 1 1 1 1 1
0 0 1 0 1 1
]]]]]]]
]
(25)
In this simulation the 72-dimensional measurements areobtained through the network Here we assume that eachnode can get a 12-dimensional measurement that is 119867
119894isin
R12times256 with its entries sampled according to N(0 172) Set1199091198940|0
= 0 1205902119894
= 5 + 17119896 and 120598 = 1 The performance
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
50 100 150 200 250Magnitude 1
0
minus1
Magnitude 1
0
minus1Magnitude 1
0
minus1
Magnitude 1
0
minus1
x
x1
x2
x3
Figure 4 The sparse signal 119909 and its estimates 119909119894(119894 = 1 2 3) using
Algorithm 1
of Algorithm 1 is depicted by Figures 4ndash6 Figures 4 and 5present the actual signal 119909 and its estimates 119909
119894(119894 = 1 2 6)
from all filters The 1-norm of 119909 and 119909119894(119894 = 1 2 6) are
shown in the top figure of Figure 6 The bottom figure ofFigure 6 presents the 2-norm of errors 119890
119894(119894 = 1 2 6)
These results show that the Kalman-consensus filter withpseudomeasurement can fuse the measurements from thenodes and satisfactory estimates can be obtained for theactual sparse signal recovery It should be noted that for anysingle node the measurement dimension is not necessaryto satisfy the lower bound 119904 log 119899 For instance in the aboveexample the lower bound on the dimension of measurementis 10 log 256 asymp 56 but only 12 measurements are obtainedby each node The estimation accuracy of Algorithm 1 isdetermined by the global measurement obtained from thewhole network and the convergence speed is influenced bythe topology structure of the network
6 Mathematical Problems in Engineering
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
x
x4
x5
x6
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Figure 5 The sparse signal 119909 and its estimates 119909119894(119894 = 4 5 6) using
Algorithm 1
051015
1-no
rm
10 20 30 40 50 60 70 800
051
15
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x11x21x31
x41x51x61
e12e22e32
e42e52e62
Figure 6 The evolution of 1199091198941(119894 = 1 2 6) and 119890
1198942(119894 =
1 2 6)
43 Sparse Signal Estimation Using KCIF-PM in All-to-AllNetwork In this part an extreme example is presented todemonstrate the ability of Algorithm 1 to fuse the measure-ments in the whole network Assume that each node onlygets a one-dimensional measurement that is 119867
119894isin R1times256
with its entries sampled according to N(0 172) Every node
012
Magnitude
50 100 150 200 250Index
50 100 150 200 250Index
x
minus1
minus2
012
Magnitude
minus1
minus2
xi
Figure 7 The sparse signal 119909 and its estimates 119909119894using Algorithm 1
in all-to-all network
10 20 30 40 50 60 70 80010203040
1-no
rm
0
1
2
3
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x1
e2
Figure 8 The evolution of 1199091198941and 119890
1198942in all of nodes in the all-
to-all network
communicates with all the others Set parameters 1205902119894= 150 +
7119896 and 120598 = 02 As shown in Figures 7 and 8 the 1-norm of allof 119909119894reaches to a consensus gradually and converges to 119909
1
1198901198942converges to zero whichmeans all of the node filters are
stable and satisfactory estimates of the actual signal 119909 can beobtained
5 Conclusion
This paper has demonstrated an effective approach to theproblem of distributed sparse signal estimation in sensornetworks The filter has been designed by introducing thepseudomeasurement equation into the Kalman-consensusfilter A dynamic parameter selection strategy has been dis-cussed to improve the performance of the existed algorithmSome numerical examples have verified the effectiveness ofthe proposed method In the future we will try to test our
Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
filtering problems In [11] three types of distributed Kalmanfiltering algorithms were proposed A distributed high-passfilter was used to fuse the local sensor measurements basedon average consensus such that the nodes in sensor networktrack the average measurement of the overall network Thealgorithms were established based on the information formof Kalman filter and the analysis of stability and performanceof the Kalman-consensus filter was provided in [12]
In this paper we aim to develop a distributed filteringmethod to estimate a sparse signal using somemeasurementsfrom a sensor network The proposed method is establishedby means of the Kalman-consensus filter and the pseu-domeasurement technology The remainder of this paper isorganized as follows Section 2 gives a brief overview of thebasic problems in compressed sampling and summarizes theKalman filter with embedded pseudomeasurement equationA dynamic parameter selection strategy is discussed aswell to improve the performance In Section 3 the Kalmanfiltering with embedded pseudomeasurement is rebuilt inthe information form The pseudomeasurement equation isintroduced into the Kalman-consensus filter to develop adistributed sparse signal estimation algorithm Simulationresults are given in Section 4 to demonstrate the effectivenessof the proposed method Some concluding remarks areprovided in Section 5
Notation The notation used here is fairly standard exceptwhere otherwise stated R denotes the set of real numbersand R119899 denotes the 119899 dimensional Euclidean space whoseelements are 119899 times 1 column vectors The support set of119909 isin R119899 is defined as Supp119909 = 119894 | 119909(119894) = 0 and 119909
0
is the cardinality of Supp119909 The 1-norm and 2-norm of119909 are defined as 119909
1= sum119899
119894=1|119909(119894)| and 119909
2= radic119909119879119909
respectively sign(sdot) is the sign function E[120585] stands for themathematical expectation of random variable 120585 N(120583 120590
2)
stands for normal distribution with mean 120583 and variance1205902 Uint[119886 119887] represents the integer uniform distribution
in the interval [119886 119887] Tr119860 denotes the trace of matrix 119860119860119865
= radicTr119860119860119879 is the Frobenius norm of matrix 119860kec119909
1 119909
119899 = [119909
119879
1sdot sdot sdot 119909119879
119899]119879
diag1198601 119860
119899 denotes
a block-diagonal matrix whose diagonal blocks are givenby 1198601 119860
119899 119878 ⪰ 0 means a real symmetric matrix 119878 is
semidefinite
2 Sparse Signal Estimation UsingKalman Filter
This section briefly overviews some basic concepts in com-pressed sensing and the method proposed in [6] In orderto recover a sparse signal a pseudomeasurement equation isembedded into the classic Kalman filter Some more detailscan be found in [1 6 13]
21 Sparse Signals Recovery Consider a signal 119909 isin R119899 119909is sparse if 119909
0is much less than 119899 Moreover 119909 is called
119904-sparse if 1199090
= 119904 Assume that 119909119896infin
119896=0is an unknown
sparse discrete-time process in R119899 119909119896evolves according to
the following dynamic model
119909119896+1
= 119860119896119909119896+ 119908119896 (1)
where 119860119896isin R119899times119899 is the state transition matrix 119908
119896infin
119896=0is a
zero-mean white Gaussian sequence with covariance 119876119896⪰ 0
and 1199090sim N(120583
0 1198750) The 119898-dimensional linear measurement
of 119909119896is
119910119896= 119867119896119909119896+ V119896 (2)
where119867119896isin R119898times119899 is the measurement matrix and V
119896infin
119896=0is a
zero-mean white Gaussian sequence with covariance 119877119896⪰ 0
The scenariowe are interested in is the underdetermined casethat is when119898 lt 119899
As shown in [1 13] 119909119896can be accurately recovered by
solving the following optimization problem
min119909119896isinR119899
100381710038171003817100381711990911989610038171003817100381710038170 st 1003817100381710038171003817119910119896 minus 119867
119896119909119896
1003817100381710038171003817
2
2le 120576 (3)
But the optimization problem (3) is NP-hard and cannotbe solved effectively Fortunately it has been proved in [1]that if the measurement matrix 119867
119896obeys the so-called
Restricted Isometry Property (RIP) the solution of (3) canbe obtained with overwhelming probability by solving thefollowing convex optimization problem
min119909119896isinR119899
100381710038171003817100381711990911989610038171003817100381710038171 st 1003817100381710038171003817119910119896 minus 119867
119896119909119896
1003817100381710038171003817
2
2le 120576 (4)
For 119904-sparse signal 119909 isin R119899 only on the order of 119898 = 119904 log 119899samples are needed to reconstruct it
22 Sparse Signal Estimation Using Kalman Filter with Pseu-domeasurement For the system given in (1) and (2) theclassic Kalman filter can provide an estimate of 119909
119896which is
the solution of the following unconstrained ℓ2minimization
problem
min119909119896isinR119899
E119909119896|1199101 119910119896
[1003817100381710038171003817119909119896 minus 119909
119896
1003817100381710038171003817
2
2] (5)
In [6] Carmi et al have discussed the stochastic case of (4)
min119909119896isinR119899
100381710038171003817100381711990911989610038171003817100381710038171 st E
119909119896|1199101 119910119896[1003817100381710038171003817119909119896 minus 119909
119896
1003817100381710038171003817
2
2] le 120576 (6)
and its dual problem
min119909119896isinR119899
E119909119896|1199101 119910119896
[1003817100381710038171003817119909119896 minus 119909
119896
1003817100381710038171003817
2
2] st 1003817100381710038171003817119909119896
10038171003817100381710038171 le 1205761015840 (7)
By constructing a pseudomeasurement equation
0 = 119896119909119896minus 1205761015840 (8)
where 119896= sign(119909119879
119896) 1205761015840 is the fictitious measurement noise
assumed to obey N(0 1205902) and the constrained optimization
problem (7) can be solved in the framework of Kalmanfilter The specific method has been summarized as CSKF-1algorithm in [6]
Mathematical Problems in Engineering 3
In pseudomeasurement equation (8) the measurementmatrix
119896is state dependent and it can be approximated by
119896
= sign(119909119879119896|119896minus1
) The divergence of this approximationhas been discussed by Theorem 1 in [14] Furthermore 120590is a tunable parameter which determines the tightness ofthe constraint on 1-norm of the state estimate 119909 In [14]the authors have proved that the performance of CSKF-1algorithm can be improved by increasing parameter 120590 andthe pseudomeasurement update time 119903 However a big 120590
means a loose constraint on sparseness and thus leads toslow convergence On the contrary a tiny 120590 can result in fastconvergence but there is a big overshoot at the beginningand an enormous steady-state error Therefore in this paperwe employ a dynamic parameter 120590 which increases over timefroma specific initial value for example set1205902 = 119886+119887119896 where119886 determines the initial convergence rate and 119887 determinesthe increase rate of parameter 120590 By selecting the parameters119886 and 119887 properly the convergence rate and the steady-stateerror of CSKF-1 algorithm can be significantly improvedThe effectiveness will be demonstrated by an example inSection 4
3 Distributed Sparse Signal Estimation
Kalman-consensus filter (KCF) is a distributed estimationalgorithm in sensor networks proposed in [11] A detailedanalysis on its stability and performance is given in [12]The KCF is developed based on the information form ofKalman filter by attaching a consensus update structure onthe measurement update procedure In this section CSKF-1 algorithm will be rebuilt in the information form ofKalman filter and the pseudomeasurement technology willbe embedded in the KCF to develop a distributed sparsesignal estimation algorithm in sensor networks
Consider a sensor networkwhose topology is representedby an undirected graphG = (VEA) of order119873with the setof nodesV = 1 2 119873 the set of edges E sube V timesV andthe adjacency matrix A = [119886
119894119895] with nonnegative adjacency
element 119886119894119895 An edge ofG is denoted by unordered pair (119894 119895)
The adjacency elements associatedwith the edges of the graphare positive that is 119886
119894119895gt 0 hArr (119894 119895) isin E The node 119895 is
called a neighbor of node 119894 if (119894 119895) isin E and 119895 = 119894 The setof neighbors of node 119894 is denoted by N
119894 Assume that G is
strongly connectedAssume that the measurement of sensor node 119894 is in
accordance with the linear model (2) Denote 119910119894119896
= [119910119894119896
0]
119867119894119896
= [119867119894119896
119896
] and V119894119896
= [V1198941198961205761015840
119894
] We can get the followingaugmented measurement equation of sensor 119894
119910119894119896
= 119867119894119896119909119896+ V119894119896 (9)
where 119867119894119896
is the measurement matrix of sensor 119894 V119894119896
is zero-mean Gaussian white noise with covariance 119877119894119896
119896
= sign(119909119879119896) and 120576
1015840
119894is the fictitious measurement noise
which obeys N(0 1205902
119894) Defining the global measurement
Y119896
= kec1199101119896 119910
119873119896 V119896
= kecV1119896 V
119873119896 H119896
=
kec1198671119896 119867
119873119896 andR
119896= diag119877
1119896 119877
119873119896 we have
Y119896= H119896119909119896+V119896 (10)
The state estimates of (1) from Kalman filter based onY1 Y
119896 can be defined as
119909119896|119896minus1
= E 119909119896| Y1 Y
119896minus1
119909119896|119896
= E 119909119896| Y1 Y
119896
(11)
and the estimate error covariance matrices can be obtainedby
119875119896|119896minus1
= E (119909119896minus 119909119896|119896minus1
) (119909119896minus 119909119896|119896minus1
)119879
| Y1 Y
119896minus1
119875119896|119896
= E (119909119896minus 119909119896|119896
) (119909119896minus 119909119896|119896
)119879
| Y1 Y
119896
(12)
The inverses of estimate error covariance matrices Σ119896|119896minus1
=
119875minus1
119896|119896minus1and Σ
119896|119896= 119875minus1
119896|119896 are known as information matrices
According to the information form of Kalman filter defining
119911119896= H119879
119896Rminus1
119896Y119896=
119873
sum
119894=1
119867119879
119894119896119877minus1
119894119896119910119894119896 (13)
119878119896= H119879
119896Rminus1
119896H119896=
119873
sum
119894=1
119867119879
119894119896119877minus1
119894119896119867119894119896
+
119873
sum
119894=1
120590minus1
119894Ω119896 (14)
whereΩ119896= sign(119909
119896)sign(119909119879
119896) we can get
Σ119896|119896
= Σ119896|119896minus1
+ 119878119896 (15)
The state estimate from the filter is
119909119896|119896
= 119909119896|119896minus1
+ Σminus1
119896|119896(119911119896minus 119878119896119909119896|119896minus1
) (16)
and the time update procedure is
119909119896+1|119896
= 119860119896119909119896|119896
(17)
Σminus1
119896+1|119896= 119860119896Σminus1
119896|119896119860119879
119896+ 119876119896 (18)
Equations (13)ndash(18) have defined the Kalman informationfilter with embedded pseudomeasurement
Remark 1 From (14) and (15) it is obvious that the intro-duction of pseudomeasurement equation impacts on theevolution of state error covariance by the sparseness ofstate since TrΩ
119896= 1199091198960 As mentioned in Section 2 Ω
119896
will be approximated by Ω119896
= sign(119909119896|119896minus1
)sign(119909119879119896|119896minus1
) inapplications
Based on the conclusion of Theorem 2 in [12] we canconstruct the following Kalman-consensus information filter
4 Mathematical Problems in EngineeringMagnitude
Magnitude
Magnitude
50 100 150 200 250
Magnitude
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
100
minus10
100
minus10
100
minus10
100
minus10
x
x with 1205902 = 500
x with 1205902 = 80
x with 1205902 = 10 + 19k
Figure 1 Sparse signal 119909 and its estimate 119909 using CSKF-1 algorithmwith different 1205902
with embedded pseudomeasurement (KCIF-PM) on eachnode in the network
119911119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119910119895119896 (19)
119878119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119867119895119896
+ sum
119895isinN119894
120590minus1
119895Ω119896 (20)
Σ119894119896|119896
= Σ119894119896|119896minus1
+ 119878119894119896 (21)
119909119894119896|119896
= 119909119894119896|119896minus1
+ Σminus1
119894119896|119896(119911119894119896
minus 119878119894119896119909119894119896|119896minus1
)
+ 120574119894Σminus1
119894119896|119896minus1sum
119895isinN119894
(119909119895119896|119896minus1
minus 119909119894119896|119896minus1
) (22)
119909119894119896+1|119896
= 119860119896119909119894119896|119896
(23)
Σminus1
119894119896+1|119896= 119860119896Σminus1
119894119896|119896119860119879
119896+ 119876119896 (24)
where 120574119894= 120598(1 + Σ
minus1
119894119896|119896minus1119865) and 120598 is a tunable parameter
which determines the weight of the consensus update suchthat the error dynamics is globally asymptotically stable andall filters asymptotically reach a consensus on state estimatesthat is 119909
1= 1199092= sdot sdot sdot = 119909
119873
Remark 2 Theglobal sensingmatrixH119896is assumed to satisfy
the Restricted Isometry Property and the 119898-dimensionalglobal measurement Y
119896is obtained through the sensor
network It is important that for any one node in the networkthere is no constraint on the dimension of its measurementwhich means it can be less than the lower bound 119904 log 119899
Even though each node can only get a one-dimensionalmeasurement we can still recover the signal as long as theglobal measurement meets the lower bound and there areenough communications between nodesThis will be verifiedby an example in the next section
Remark 3 Unlike CSKF-1 algorithm there are no iterativepseudomeasurement updates in the filter This procedureis implemented simultaneously with the consensus updateduring the communications between the nodes in thenetwork
The intact version of the algorithm given by (19)ndash(24) issummarized as Algorithm 1
4 Illustrative Examples
In this section we will verify the effectiveness of the methodsproposed in the previous sections by some numerical exam-ples
41 Sparse Signal Estimation Using CSKF-1 with DynamicParameter 120590
2 In this part we will test CSKF-1 algorithmwith two constant parameters 1205902 and a dynamic parameter1205902 which varies according to a linear function of time Here
we attempt to estimate a static sparse signal 119909 isin R256which is 10 sparse For system (1) we have 119860 = 119868
256and
119876119896
= 0 The index 119894 in Supp119909 and the values of 119909(119894)
are unknown The sparse signal 119909 is generated by creatingthe support set from 119894 sim Uint[1 256] and setting the value119909(119894) sim N(0 5) The sensing matrix 119867 isin R72times256 consisted ofentries sampled according to N(0 172) This type of matrixhas been shown to satisfy the Restricted Isometry Propertywith overwhelming probability The measurement noise isV sim N(0 001
2times 11986872) Set 119909
0= 0 define the a posteriori
estimation error 119890119896
= 119909 minus 119909119896|119896 The parameter 1205902 is set to
be 500 80 and 10 + 19119896 respectively The results are shownin Figures 1 and 2 The actual signal 119909 and its estimates withparameter 1205902 = 500 80 and 10 + 19119896 are shown in Figure 1respectively It is evident that the best estimate of 119909 can beobtained with the dynamic parameter 1205902 = 10 + 19119896 Theevolutions of 119909
1and 119890
2are shown in Figure 2 These
results imply that the dynamic parameter 120590 with properlyselected 119886 and 119887 can lead to superior performance of CSKF-1algorithm on both the rate of convergence and the steady-state error
42 Sparse Signal EstimationUsing KCIF-PM inGrid TopologyNetwork In this part we will estimate a sparse signal usingAlgorithm 1 and all of measurements are obtained through asensor network Without loss of generality consider a sensornetwork with 6 nodes as shown in Figure 3 whose topologyis represented by an undirected graph G = (VEA) withthe set of nodes V = 1 2 3 4 5 6 the set of edges E =
(1 2) (1 3) (2 3) (2 4) (2 5) (3 5) (3 6) (4 5) (5 6)and the adjacency matrix
Mathematical Problems in Engineering 5
(1) Set Σ1198941|0
= 119875minus1
0 1199091198941|0
= 1205830
(2) for 119896 = 1 2 3 do(3) Compute 119906
119894119896= 119867119879
119894119896119877119894119896119910119894119896and 119880
119894119896= 119867119879
119894119896119877119894119896119867119894119896
+ 120590minus1
119894Ω119894119896
(4) Send [119909119894119896|119896minus1
119906119894119896 119880119894119896] to node 119895 isin N
119894
(5) Receive [119909119895119896|119896minus1
119906119895119896 119880119895119896] from node 119895 isin N
119894
(6) Fuse local information using (19) and (20)(7) Compute measurement update using (21) and (22)(8) Compute time update using (23) and (24)(9) end for
Algorithm 1 KCIF-PM
10 20 30 40 50 60 70 80050100150
1-no
rm
05101520
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1 with 1205902= 500
x1 with 1205902= 80
x1 with 1205902= 10 + 19k
x1
e2 with 1205902= 500
e2 with 1205902= 80
e2 with 1205902= 10 + 19k
Figure 2 The evolutions of 1199091and 119890
2with different 1205902
1
2 3
4 5 6
Figure 3 Topology structure of the sensor network
A =
[[[[[[[
[
1 1 1 0 0 0
1 1 1 1 1 0
1 1 1 0 1 1
0 1 0 1 1 0
0 1 1 1 1 1
0 0 1 0 1 1
]]]]]]]
]
(25)
In this simulation the 72-dimensional measurements areobtained through the network Here we assume that eachnode can get a 12-dimensional measurement that is 119867
119894isin
R12times256 with its entries sampled according to N(0 172) Set1199091198940|0
= 0 1205902119894
= 5 + 17119896 and 120598 = 1 The performance
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
50 100 150 200 250Magnitude 1
0
minus1
Magnitude 1
0
minus1Magnitude 1
0
minus1
Magnitude 1
0
minus1
x
x1
x2
x3
Figure 4 The sparse signal 119909 and its estimates 119909119894(119894 = 1 2 3) using
Algorithm 1
of Algorithm 1 is depicted by Figures 4ndash6 Figures 4 and 5present the actual signal 119909 and its estimates 119909
119894(119894 = 1 2 6)
from all filters The 1-norm of 119909 and 119909119894(119894 = 1 2 6) are
shown in the top figure of Figure 6 The bottom figure ofFigure 6 presents the 2-norm of errors 119890
119894(119894 = 1 2 6)
These results show that the Kalman-consensus filter withpseudomeasurement can fuse the measurements from thenodes and satisfactory estimates can be obtained for theactual sparse signal recovery It should be noted that for anysingle node the measurement dimension is not necessaryto satisfy the lower bound 119904 log 119899 For instance in the aboveexample the lower bound on the dimension of measurementis 10 log 256 asymp 56 but only 12 measurements are obtainedby each node The estimation accuracy of Algorithm 1 isdetermined by the global measurement obtained from thewhole network and the convergence speed is influenced bythe topology structure of the network
6 Mathematical Problems in Engineering
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
x
x4
x5
x6
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Figure 5 The sparse signal 119909 and its estimates 119909119894(119894 = 4 5 6) using
Algorithm 1
051015
1-no
rm
10 20 30 40 50 60 70 800
051
15
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x11x21x31
x41x51x61
e12e22e32
e42e52e62
Figure 6 The evolution of 1199091198941(119894 = 1 2 6) and 119890
1198942(119894 =
1 2 6)
43 Sparse Signal Estimation Using KCIF-PM in All-to-AllNetwork In this part an extreme example is presented todemonstrate the ability of Algorithm 1 to fuse the measure-ments in the whole network Assume that each node onlygets a one-dimensional measurement that is 119867
119894isin R1times256
with its entries sampled according to N(0 172) Every node
012
Magnitude
50 100 150 200 250Index
50 100 150 200 250Index
x
minus1
minus2
012
Magnitude
minus1
minus2
xi
Figure 7 The sparse signal 119909 and its estimates 119909119894using Algorithm 1
in all-to-all network
10 20 30 40 50 60 70 80010203040
1-no
rm
0
1
2
3
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x1
e2
Figure 8 The evolution of 1199091198941and 119890
1198942in all of nodes in the all-
to-all network
communicates with all the others Set parameters 1205902119894= 150 +
7119896 and 120598 = 02 As shown in Figures 7 and 8 the 1-norm of allof 119909119894reaches to a consensus gradually and converges to 119909
1
1198901198942converges to zero whichmeans all of the node filters are
stable and satisfactory estimates of the actual signal 119909 can beobtained
5 Conclusion
This paper has demonstrated an effective approach to theproblem of distributed sparse signal estimation in sensornetworks The filter has been designed by introducing thepseudomeasurement equation into the Kalman-consensusfilter A dynamic parameter selection strategy has been dis-cussed to improve the performance of the existed algorithmSome numerical examples have verified the effectiveness ofthe proposed method In the future we will try to test our
Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
In pseudomeasurement equation (8) the measurementmatrix
119896is state dependent and it can be approximated by
119896
= sign(119909119879119896|119896minus1
) The divergence of this approximationhas been discussed by Theorem 1 in [14] Furthermore 120590is a tunable parameter which determines the tightness ofthe constraint on 1-norm of the state estimate 119909 In [14]the authors have proved that the performance of CSKF-1algorithm can be improved by increasing parameter 120590 andthe pseudomeasurement update time 119903 However a big 120590
means a loose constraint on sparseness and thus leads toslow convergence On the contrary a tiny 120590 can result in fastconvergence but there is a big overshoot at the beginningand an enormous steady-state error Therefore in this paperwe employ a dynamic parameter 120590 which increases over timefroma specific initial value for example set1205902 = 119886+119887119896 where119886 determines the initial convergence rate and 119887 determinesthe increase rate of parameter 120590 By selecting the parameters119886 and 119887 properly the convergence rate and the steady-stateerror of CSKF-1 algorithm can be significantly improvedThe effectiveness will be demonstrated by an example inSection 4
3 Distributed Sparse Signal Estimation
Kalman-consensus filter (KCF) is a distributed estimationalgorithm in sensor networks proposed in [11] A detailedanalysis on its stability and performance is given in [12]The KCF is developed based on the information form ofKalman filter by attaching a consensus update structure onthe measurement update procedure In this section CSKF-1 algorithm will be rebuilt in the information form ofKalman filter and the pseudomeasurement technology willbe embedded in the KCF to develop a distributed sparsesignal estimation algorithm in sensor networks
Consider a sensor networkwhose topology is representedby an undirected graphG = (VEA) of order119873with the setof nodesV = 1 2 119873 the set of edges E sube V timesV andthe adjacency matrix A = [119886
119894119895] with nonnegative adjacency
element 119886119894119895 An edge ofG is denoted by unordered pair (119894 119895)
The adjacency elements associatedwith the edges of the graphare positive that is 119886
119894119895gt 0 hArr (119894 119895) isin E The node 119895 is
called a neighbor of node 119894 if (119894 119895) isin E and 119895 = 119894 The setof neighbors of node 119894 is denoted by N
119894 Assume that G is
strongly connectedAssume that the measurement of sensor node 119894 is in
accordance with the linear model (2) Denote 119910119894119896
= [119910119894119896
0]
119867119894119896
= [119867119894119896
119896
] and V119894119896
= [V1198941198961205761015840
119894
] We can get the followingaugmented measurement equation of sensor 119894
119910119894119896
= 119867119894119896119909119896+ V119894119896 (9)
where 119867119894119896
is the measurement matrix of sensor 119894 V119894119896
is zero-mean Gaussian white noise with covariance 119877119894119896
119896
= sign(119909119879119896) and 120576
1015840
119894is the fictitious measurement noise
which obeys N(0 1205902
119894) Defining the global measurement
Y119896
= kec1199101119896 119910
119873119896 V119896
= kecV1119896 V
119873119896 H119896
=
kec1198671119896 119867
119873119896 andR
119896= diag119877
1119896 119877
119873119896 we have
Y119896= H119896119909119896+V119896 (10)
The state estimates of (1) from Kalman filter based onY1 Y
119896 can be defined as
119909119896|119896minus1
= E 119909119896| Y1 Y
119896minus1
119909119896|119896
= E 119909119896| Y1 Y
119896
(11)
and the estimate error covariance matrices can be obtainedby
119875119896|119896minus1
= E (119909119896minus 119909119896|119896minus1
) (119909119896minus 119909119896|119896minus1
)119879
| Y1 Y
119896minus1
119875119896|119896
= E (119909119896minus 119909119896|119896
) (119909119896minus 119909119896|119896
)119879
| Y1 Y
119896
(12)
The inverses of estimate error covariance matrices Σ119896|119896minus1
=
119875minus1
119896|119896minus1and Σ
119896|119896= 119875minus1
119896|119896 are known as information matrices
According to the information form of Kalman filter defining
119911119896= H119879
119896Rminus1
119896Y119896=
119873
sum
119894=1
119867119879
119894119896119877minus1
119894119896119910119894119896 (13)
119878119896= H119879
119896Rminus1
119896H119896=
119873
sum
119894=1
119867119879
119894119896119877minus1
119894119896119867119894119896
+
119873
sum
119894=1
120590minus1
119894Ω119896 (14)
whereΩ119896= sign(119909
119896)sign(119909119879
119896) we can get
Σ119896|119896
= Σ119896|119896minus1
+ 119878119896 (15)
The state estimate from the filter is
119909119896|119896
= 119909119896|119896minus1
+ Σminus1
119896|119896(119911119896minus 119878119896119909119896|119896minus1
) (16)
and the time update procedure is
119909119896+1|119896
= 119860119896119909119896|119896
(17)
Σminus1
119896+1|119896= 119860119896Σminus1
119896|119896119860119879
119896+ 119876119896 (18)
Equations (13)ndash(18) have defined the Kalman informationfilter with embedded pseudomeasurement
Remark 1 From (14) and (15) it is obvious that the intro-duction of pseudomeasurement equation impacts on theevolution of state error covariance by the sparseness ofstate since TrΩ
119896= 1199091198960 As mentioned in Section 2 Ω
119896
will be approximated by Ω119896
= sign(119909119896|119896minus1
)sign(119909119879119896|119896minus1
) inapplications
Based on the conclusion of Theorem 2 in [12] we canconstruct the following Kalman-consensus information filter
4 Mathematical Problems in EngineeringMagnitude
Magnitude
Magnitude
50 100 150 200 250
Magnitude
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
100
minus10
100
minus10
100
minus10
100
minus10
x
x with 1205902 = 500
x with 1205902 = 80
x with 1205902 = 10 + 19k
Figure 1 Sparse signal 119909 and its estimate 119909 using CSKF-1 algorithmwith different 1205902
with embedded pseudomeasurement (KCIF-PM) on eachnode in the network
119911119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119910119895119896 (19)
119878119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119867119895119896
+ sum
119895isinN119894
120590minus1
119895Ω119896 (20)
Σ119894119896|119896
= Σ119894119896|119896minus1
+ 119878119894119896 (21)
119909119894119896|119896
= 119909119894119896|119896minus1
+ Σminus1
119894119896|119896(119911119894119896
minus 119878119894119896119909119894119896|119896minus1
)
+ 120574119894Σminus1
119894119896|119896minus1sum
119895isinN119894
(119909119895119896|119896minus1
minus 119909119894119896|119896minus1
) (22)
119909119894119896+1|119896
= 119860119896119909119894119896|119896
(23)
Σminus1
119894119896+1|119896= 119860119896Σminus1
119894119896|119896119860119879
119896+ 119876119896 (24)
where 120574119894= 120598(1 + Σ
minus1
119894119896|119896minus1119865) and 120598 is a tunable parameter
which determines the weight of the consensus update suchthat the error dynamics is globally asymptotically stable andall filters asymptotically reach a consensus on state estimatesthat is 119909
1= 1199092= sdot sdot sdot = 119909
119873
Remark 2 Theglobal sensingmatrixH119896is assumed to satisfy
the Restricted Isometry Property and the 119898-dimensionalglobal measurement Y
119896is obtained through the sensor
network It is important that for any one node in the networkthere is no constraint on the dimension of its measurementwhich means it can be less than the lower bound 119904 log 119899
Even though each node can only get a one-dimensionalmeasurement we can still recover the signal as long as theglobal measurement meets the lower bound and there areenough communications between nodesThis will be verifiedby an example in the next section
Remark 3 Unlike CSKF-1 algorithm there are no iterativepseudomeasurement updates in the filter This procedureis implemented simultaneously with the consensus updateduring the communications between the nodes in thenetwork
The intact version of the algorithm given by (19)ndash(24) issummarized as Algorithm 1
4 Illustrative Examples
In this section we will verify the effectiveness of the methodsproposed in the previous sections by some numerical exam-ples
41 Sparse Signal Estimation Using CSKF-1 with DynamicParameter 120590
2 In this part we will test CSKF-1 algorithmwith two constant parameters 1205902 and a dynamic parameter1205902 which varies according to a linear function of time Here
we attempt to estimate a static sparse signal 119909 isin R256which is 10 sparse For system (1) we have 119860 = 119868
256and
119876119896
= 0 The index 119894 in Supp119909 and the values of 119909(119894)
are unknown The sparse signal 119909 is generated by creatingthe support set from 119894 sim Uint[1 256] and setting the value119909(119894) sim N(0 5) The sensing matrix 119867 isin R72times256 consisted ofentries sampled according to N(0 172) This type of matrixhas been shown to satisfy the Restricted Isometry Propertywith overwhelming probability The measurement noise isV sim N(0 001
2times 11986872) Set 119909
0= 0 define the a posteriori
estimation error 119890119896
= 119909 minus 119909119896|119896 The parameter 1205902 is set to
be 500 80 and 10 + 19119896 respectively The results are shownin Figures 1 and 2 The actual signal 119909 and its estimates withparameter 1205902 = 500 80 and 10 + 19119896 are shown in Figure 1respectively It is evident that the best estimate of 119909 can beobtained with the dynamic parameter 1205902 = 10 + 19119896 Theevolutions of 119909
1and 119890
2are shown in Figure 2 These
results imply that the dynamic parameter 120590 with properlyselected 119886 and 119887 can lead to superior performance of CSKF-1algorithm on both the rate of convergence and the steady-state error
42 Sparse Signal EstimationUsing KCIF-PM inGrid TopologyNetwork In this part we will estimate a sparse signal usingAlgorithm 1 and all of measurements are obtained through asensor network Without loss of generality consider a sensornetwork with 6 nodes as shown in Figure 3 whose topologyis represented by an undirected graph G = (VEA) withthe set of nodes V = 1 2 3 4 5 6 the set of edges E =
(1 2) (1 3) (2 3) (2 4) (2 5) (3 5) (3 6) (4 5) (5 6)and the adjacency matrix
Mathematical Problems in Engineering 5
(1) Set Σ1198941|0
= 119875minus1
0 1199091198941|0
= 1205830
(2) for 119896 = 1 2 3 do(3) Compute 119906
119894119896= 119867119879
119894119896119877119894119896119910119894119896and 119880
119894119896= 119867119879
119894119896119877119894119896119867119894119896
+ 120590minus1
119894Ω119894119896
(4) Send [119909119894119896|119896minus1
119906119894119896 119880119894119896] to node 119895 isin N
119894
(5) Receive [119909119895119896|119896minus1
119906119895119896 119880119895119896] from node 119895 isin N
119894
(6) Fuse local information using (19) and (20)(7) Compute measurement update using (21) and (22)(8) Compute time update using (23) and (24)(9) end for
Algorithm 1 KCIF-PM
10 20 30 40 50 60 70 80050100150
1-no
rm
05101520
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1 with 1205902= 500
x1 with 1205902= 80
x1 with 1205902= 10 + 19k
x1
e2 with 1205902= 500
e2 with 1205902= 80
e2 with 1205902= 10 + 19k
Figure 2 The evolutions of 1199091and 119890
2with different 1205902
1
2 3
4 5 6
Figure 3 Topology structure of the sensor network
A =
[[[[[[[
[
1 1 1 0 0 0
1 1 1 1 1 0
1 1 1 0 1 1
0 1 0 1 1 0
0 1 1 1 1 1
0 0 1 0 1 1
]]]]]]]
]
(25)
In this simulation the 72-dimensional measurements areobtained through the network Here we assume that eachnode can get a 12-dimensional measurement that is 119867
119894isin
R12times256 with its entries sampled according to N(0 172) Set1199091198940|0
= 0 1205902119894
= 5 + 17119896 and 120598 = 1 The performance
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
50 100 150 200 250Magnitude 1
0
minus1
Magnitude 1
0
minus1Magnitude 1
0
minus1
Magnitude 1
0
minus1
x
x1
x2
x3
Figure 4 The sparse signal 119909 and its estimates 119909119894(119894 = 1 2 3) using
Algorithm 1
of Algorithm 1 is depicted by Figures 4ndash6 Figures 4 and 5present the actual signal 119909 and its estimates 119909
119894(119894 = 1 2 6)
from all filters The 1-norm of 119909 and 119909119894(119894 = 1 2 6) are
shown in the top figure of Figure 6 The bottom figure ofFigure 6 presents the 2-norm of errors 119890
119894(119894 = 1 2 6)
These results show that the Kalman-consensus filter withpseudomeasurement can fuse the measurements from thenodes and satisfactory estimates can be obtained for theactual sparse signal recovery It should be noted that for anysingle node the measurement dimension is not necessaryto satisfy the lower bound 119904 log 119899 For instance in the aboveexample the lower bound on the dimension of measurementis 10 log 256 asymp 56 but only 12 measurements are obtainedby each node The estimation accuracy of Algorithm 1 isdetermined by the global measurement obtained from thewhole network and the convergence speed is influenced bythe topology structure of the network
6 Mathematical Problems in Engineering
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
x
x4
x5
x6
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Figure 5 The sparse signal 119909 and its estimates 119909119894(119894 = 4 5 6) using
Algorithm 1
051015
1-no
rm
10 20 30 40 50 60 70 800
051
15
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x11x21x31
x41x51x61
e12e22e32
e42e52e62
Figure 6 The evolution of 1199091198941(119894 = 1 2 6) and 119890
1198942(119894 =
1 2 6)
43 Sparse Signal Estimation Using KCIF-PM in All-to-AllNetwork In this part an extreme example is presented todemonstrate the ability of Algorithm 1 to fuse the measure-ments in the whole network Assume that each node onlygets a one-dimensional measurement that is 119867
119894isin R1times256
with its entries sampled according to N(0 172) Every node
012
Magnitude
50 100 150 200 250Index
50 100 150 200 250Index
x
minus1
minus2
012
Magnitude
minus1
minus2
xi
Figure 7 The sparse signal 119909 and its estimates 119909119894using Algorithm 1
in all-to-all network
10 20 30 40 50 60 70 80010203040
1-no
rm
0
1
2
3
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x1
e2
Figure 8 The evolution of 1199091198941and 119890
1198942in all of nodes in the all-
to-all network
communicates with all the others Set parameters 1205902119894= 150 +
7119896 and 120598 = 02 As shown in Figures 7 and 8 the 1-norm of allof 119909119894reaches to a consensus gradually and converges to 119909
1
1198901198942converges to zero whichmeans all of the node filters are
stable and satisfactory estimates of the actual signal 119909 can beobtained
5 Conclusion
This paper has demonstrated an effective approach to theproblem of distributed sparse signal estimation in sensornetworks The filter has been designed by introducing thepseudomeasurement equation into the Kalman-consensusfilter A dynamic parameter selection strategy has been dis-cussed to improve the performance of the existed algorithmSome numerical examples have verified the effectiveness ofthe proposed method In the future we will try to test our
Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in EngineeringMagnitude
Magnitude
Magnitude
50 100 150 200 250
Magnitude
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
100
minus10
100
minus10
100
minus10
100
minus10
x
x with 1205902 = 500
x with 1205902 = 80
x with 1205902 = 10 + 19k
Figure 1 Sparse signal 119909 and its estimate 119909 using CSKF-1 algorithmwith different 1205902
with embedded pseudomeasurement (KCIF-PM) on eachnode in the network
119911119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119910119895119896 (19)
119878119894119896
= sum
119895isinN119894
119867119879
119895119896119877minus1
119895119896119867119895119896
+ sum
119895isinN119894
120590minus1
119895Ω119896 (20)
Σ119894119896|119896
= Σ119894119896|119896minus1
+ 119878119894119896 (21)
119909119894119896|119896
= 119909119894119896|119896minus1
+ Σminus1
119894119896|119896(119911119894119896
minus 119878119894119896119909119894119896|119896minus1
)
+ 120574119894Σminus1
119894119896|119896minus1sum
119895isinN119894
(119909119895119896|119896minus1
minus 119909119894119896|119896minus1
) (22)
119909119894119896+1|119896
= 119860119896119909119894119896|119896
(23)
Σminus1
119894119896+1|119896= 119860119896Σminus1
119894119896|119896119860119879
119896+ 119876119896 (24)
where 120574119894= 120598(1 + Σ
minus1
119894119896|119896minus1119865) and 120598 is a tunable parameter
which determines the weight of the consensus update suchthat the error dynamics is globally asymptotically stable andall filters asymptotically reach a consensus on state estimatesthat is 119909
1= 1199092= sdot sdot sdot = 119909
119873
Remark 2 Theglobal sensingmatrixH119896is assumed to satisfy
the Restricted Isometry Property and the 119898-dimensionalglobal measurement Y
119896is obtained through the sensor
network It is important that for any one node in the networkthere is no constraint on the dimension of its measurementwhich means it can be less than the lower bound 119904 log 119899
Even though each node can only get a one-dimensionalmeasurement we can still recover the signal as long as theglobal measurement meets the lower bound and there areenough communications between nodesThis will be verifiedby an example in the next section
Remark 3 Unlike CSKF-1 algorithm there are no iterativepseudomeasurement updates in the filter This procedureis implemented simultaneously with the consensus updateduring the communications between the nodes in thenetwork
The intact version of the algorithm given by (19)ndash(24) issummarized as Algorithm 1
4 Illustrative Examples
In this section we will verify the effectiveness of the methodsproposed in the previous sections by some numerical exam-ples
41 Sparse Signal Estimation Using CSKF-1 with DynamicParameter 120590
2 In this part we will test CSKF-1 algorithmwith two constant parameters 1205902 and a dynamic parameter1205902 which varies according to a linear function of time Here
we attempt to estimate a static sparse signal 119909 isin R256which is 10 sparse For system (1) we have 119860 = 119868
256and
119876119896
= 0 The index 119894 in Supp119909 and the values of 119909(119894)
are unknown The sparse signal 119909 is generated by creatingthe support set from 119894 sim Uint[1 256] and setting the value119909(119894) sim N(0 5) The sensing matrix 119867 isin R72times256 consisted ofentries sampled according to N(0 172) This type of matrixhas been shown to satisfy the Restricted Isometry Propertywith overwhelming probability The measurement noise isV sim N(0 001
2times 11986872) Set 119909
0= 0 define the a posteriori
estimation error 119890119896
= 119909 minus 119909119896|119896 The parameter 1205902 is set to
be 500 80 and 10 + 19119896 respectively The results are shownin Figures 1 and 2 The actual signal 119909 and its estimates withparameter 1205902 = 500 80 and 10 + 19119896 are shown in Figure 1respectively It is evident that the best estimate of 119909 can beobtained with the dynamic parameter 1205902 = 10 + 19119896 Theevolutions of 119909
1and 119890
2are shown in Figure 2 These
results imply that the dynamic parameter 120590 with properlyselected 119886 and 119887 can lead to superior performance of CSKF-1algorithm on both the rate of convergence and the steady-state error
42 Sparse Signal EstimationUsing KCIF-PM inGrid TopologyNetwork In this part we will estimate a sparse signal usingAlgorithm 1 and all of measurements are obtained through asensor network Without loss of generality consider a sensornetwork with 6 nodes as shown in Figure 3 whose topologyis represented by an undirected graph G = (VEA) withthe set of nodes V = 1 2 3 4 5 6 the set of edges E =
(1 2) (1 3) (2 3) (2 4) (2 5) (3 5) (3 6) (4 5) (5 6)and the adjacency matrix
Mathematical Problems in Engineering 5
(1) Set Σ1198941|0
= 119875minus1
0 1199091198941|0
= 1205830
(2) for 119896 = 1 2 3 do(3) Compute 119906
119894119896= 119867119879
119894119896119877119894119896119910119894119896and 119880
119894119896= 119867119879
119894119896119877119894119896119867119894119896
+ 120590minus1
119894Ω119894119896
(4) Send [119909119894119896|119896minus1
119906119894119896 119880119894119896] to node 119895 isin N
119894
(5) Receive [119909119895119896|119896minus1
119906119895119896 119880119895119896] from node 119895 isin N
119894
(6) Fuse local information using (19) and (20)(7) Compute measurement update using (21) and (22)(8) Compute time update using (23) and (24)(9) end for
Algorithm 1 KCIF-PM
10 20 30 40 50 60 70 80050100150
1-no
rm
05101520
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1 with 1205902= 500
x1 with 1205902= 80
x1 with 1205902= 10 + 19k
x1
e2 with 1205902= 500
e2 with 1205902= 80
e2 with 1205902= 10 + 19k
Figure 2 The evolutions of 1199091and 119890
2with different 1205902
1
2 3
4 5 6
Figure 3 Topology structure of the sensor network
A =
[[[[[[[
[
1 1 1 0 0 0
1 1 1 1 1 0
1 1 1 0 1 1
0 1 0 1 1 0
0 1 1 1 1 1
0 0 1 0 1 1
]]]]]]]
]
(25)
In this simulation the 72-dimensional measurements areobtained through the network Here we assume that eachnode can get a 12-dimensional measurement that is 119867
119894isin
R12times256 with its entries sampled according to N(0 172) Set1199091198940|0
= 0 1205902119894
= 5 + 17119896 and 120598 = 1 The performance
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
50 100 150 200 250Magnitude 1
0
minus1
Magnitude 1
0
minus1Magnitude 1
0
minus1
Magnitude 1
0
minus1
x
x1
x2
x3
Figure 4 The sparse signal 119909 and its estimates 119909119894(119894 = 1 2 3) using
Algorithm 1
of Algorithm 1 is depicted by Figures 4ndash6 Figures 4 and 5present the actual signal 119909 and its estimates 119909
119894(119894 = 1 2 6)
from all filters The 1-norm of 119909 and 119909119894(119894 = 1 2 6) are
shown in the top figure of Figure 6 The bottom figure ofFigure 6 presents the 2-norm of errors 119890
119894(119894 = 1 2 6)
These results show that the Kalman-consensus filter withpseudomeasurement can fuse the measurements from thenodes and satisfactory estimates can be obtained for theactual sparse signal recovery It should be noted that for anysingle node the measurement dimension is not necessaryto satisfy the lower bound 119904 log 119899 For instance in the aboveexample the lower bound on the dimension of measurementis 10 log 256 asymp 56 but only 12 measurements are obtainedby each node The estimation accuracy of Algorithm 1 isdetermined by the global measurement obtained from thewhole network and the convergence speed is influenced bythe topology structure of the network
6 Mathematical Problems in Engineering
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
x
x4
x5
x6
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Figure 5 The sparse signal 119909 and its estimates 119909119894(119894 = 4 5 6) using
Algorithm 1
051015
1-no
rm
10 20 30 40 50 60 70 800
051
15
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x11x21x31
x41x51x61
e12e22e32
e42e52e62
Figure 6 The evolution of 1199091198941(119894 = 1 2 6) and 119890
1198942(119894 =
1 2 6)
43 Sparse Signal Estimation Using KCIF-PM in All-to-AllNetwork In this part an extreme example is presented todemonstrate the ability of Algorithm 1 to fuse the measure-ments in the whole network Assume that each node onlygets a one-dimensional measurement that is 119867
119894isin R1times256
with its entries sampled according to N(0 172) Every node
012
Magnitude
50 100 150 200 250Index
50 100 150 200 250Index
x
minus1
minus2
012
Magnitude
minus1
minus2
xi
Figure 7 The sparse signal 119909 and its estimates 119909119894using Algorithm 1
in all-to-all network
10 20 30 40 50 60 70 80010203040
1-no
rm
0
1
2
3
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x1
e2
Figure 8 The evolution of 1199091198941and 119890
1198942in all of nodes in the all-
to-all network
communicates with all the others Set parameters 1205902119894= 150 +
7119896 and 120598 = 02 As shown in Figures 7 and 8 the 1-norm of allof 119909119894reaches to a consensus gradually and converges to 119909
1
1198901198942converges to zero whichmeans all of the node filters are
stable and satisfactory estimates of the actual signal 119909 can beobtained
5 Conclusion
This paper has demonstrated an effective approach to theproblem of distributed sparse signal estimation in sensornetworks The filter has been designed by introducing thepseudomeasurement equation into the Kalman-consensusfilter A dynamic parameter selection strategy has been dis-cussed to improve the performance of the existed algorithmSome numerical examples have verified the effectiveness ofthe proposed method In the future we will try to test our
Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
(1) Set Σ1198941|0
= 119875minus1
0 1199091198941|0
= 1205830
(2) for 119896 = 1 2 3 do(3) Compute 119906
119894119896= 119867119879
119894119896119877119894119896119910119894119896and 119880
119894119896= 119867119879
119894119896119877119894119896119867119894119896
+ 120590minus1
119894Ω119894119896
(4) Send [119909119894119896|119896minus1
119906119894119896 119880119894119896] to node 119895 isin N
119894
(5) Receive [119909119895119896|119896minus1
119906119895119896 119880119895119896] from node 119895 isin N
119894
(6) Fuse local information using (19) and (20)(7) Compute measurement update using (21) and (22)(8) Compute time update using (23) and (24)(9) end for
Algorithm 1 KCIF-PM
10 20 30 40 50 60 70 80050100150
1-no
rm
05101520
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1 with 1205902= 500
x1 with 1205902= 80
x1 with 1205902= 10 + 19k
x1
e2 with 1205902= 500
e2 with 1205902= 80
e2 with 1205902= 10 + 19k
Figure 2 The evolutions of 1199091and 119890
2with different 1205902
1
2 3
4 5 6
Figure 3 Topology structure of the sensor network
A =
[[[[[[[
[
1 1 1 0 0 0
1 1 1 1 1 0
1 1 1 0 1 1
0 1 0 1 1 0
0 1 1 1 1 1
0 0 1 0 1 1
]]]]]]]
]
(25)
In this simulation the 72-dimensional measurements areobtained through the network Here we assume that eachnode can get a 12-dimensional measurement that is 119867
119894isin
R12times256 with its entries sampled according to N(0 172) Set1199091198940|0
= 0 1205902119894
= 5 + 17119896 and 120598 = 1 The performance
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
50 100 150 200 250Magnitude 1
0
minus1
Magnitude 1
0
minus1Magnitude 1
0
minus1
Magnitude 1
0
minus1
x
x1
x2
x3
Figure 4 The sparse signal 119909 and its estimates 119909119894(119894 = 1 2 3) using
Algorithm 1
of Algorithm 1 is depicted by Figures 4ndash6 Figures 4 and 5present the actual signal 119909 and its estimates 119909
119894(119894 = 1 2 6)
from all filters The 1-norm of 119909 and 119909119894(119894 = 1 2 6) are
shown in the top figure of Figure 6 The bottom figure ofFigure 6 presents the 2-norm of errors 119890
119894(119894 = 1 2 6)
These results show that the Kalman-consensus filter withpseudomeasurement can fuse the measurements from thenodes and satisfactory estimates can be obtained for theactual sparse signal recovery It should be noted that for anysingle node the measurement dimension is not necessaryto satisfy the lower bound 119904 log 119899 For instance in the aboveexample the lower bound on the dimension of measurementis 10 log 256 asymp 56 but only 12 measurements are obtainedby each node The estimation accuracy of Algorithm 1 isdetermined by the global measurement obtained from thewhole network and the convergence speed is influenced bythe topology structure of the network
6 Mathematical Problems in Engineering
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
x
x4
x5
x6
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Figure 5 The sparse signal 119909 and its estimates 119909119894(119894 = 4 5 6) using
Algorithm 1
051015
1-no
rm
10 20 30 40 50 60 70 800
051
15
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x11x21x31
x41x51x61
e12e22e32
e42e52e62
Figure 6 The evolution of 1199091198941(119894 = 1 2 6) and 119890
1198942(119894 =
1 2 6)
43 Sparse Signal Estimation Using KCIF-PM in All-to-AllNetwork In this part an extreme example is presented todemonstrate the ability of Algorithm 1 to fuse the measure-ments in the whole network Assume that each node onlygets a one-dimensional measurement that is 119867
119894isin R1times256
with its entries sampled according to N(0 172) Every node
012
Magnitude
50 100 150 200 250Index
50 100 150 200 250Index
x
minus1
minus2
012
Magnitude
minus1
minus2
xi
Figure 7 The sparse signal 119909 and its estimates 119909119894using Algorithm 1
in all-to-all network
10 20 30 40 50 60 70 80010203040
1-no
rm
0
1
2
3
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x1
e2
Figure 8 The evolution of 1199091198941and 119890
1198942in all of nodes in the all-
to-all network
communicates with all the others Set parameters 1205902119894= 150 +
7119896 and 120598 = 02 As shown in Figures 7 and 8 the 1-norm of allof 119909119894reaches to a consensus gradually and converges to 119909
1
1198901198942converges to zero whichmeans all of the node filters are
stable and satisfactory estimates of the actual signal 119909 can beobtained
5 Conclusion
This paper has demonstrated an effective approach to theproblem of distributed sparse signal estimation in sensornetworks The filter has been designed by introducing thepseudomeasurement equation into the Kalman-consensusfilter A dynamic parameter selection strategy has been dis-cussed to improve the performance of the existed algorithmSome numerical examples have verified the effectiveness ofthe proposed method In the future we will try to test our
Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250
50 100 150 200 250Index
x
x4
x5
x6
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Magnitude 1
0
minus1
Figure 5 The sparse signal 119909 and its estimates 119909119894(119894 = 4 5 6) using
Algorithm 1
051015
1-no
rm
10 20 30 40 50 60 70 800
051
15
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x11x21x31
x41x51x61
e12e22e32
e42e52e62
Figure 6 The evolution of 1199091198941(119894 = 1 2 6) and 119890
1198942(119894 =
1 2 6)
43 Sparse Signal Estimation Using KCIF-PM in All-to-AllNetwork In this part an extreme example is presented todemonstrate the ability of Algorithm 1 to fuse the measure-ments in the whole network Assume that each node onlygets a one-dimensional measurement that is 119867
119894isin R1times256
with its entries sampled according to N(0 172) Every node
012
Magnitude
50 100 150 200 250Index
50 100 150 200 250Index
x
minus1
minus2
012
Magnitude
minus1
minus2
xi
Figure 7 The sparse signal 119909 and its estimates 119909119894using Algorithm 1
in all-to-all network
10 20 30 40 50 60 70 80010203040
1-no
rm
0
1
2
3
Index
2-no
rm
10 20 30 40 50 60 70 80Index
x1x1
e2
Figure 8 The evolution of 1199091198941and 119890
1198942in all of nodes in the all-
to-all network
communicates with all the others Set parameters 1205902119894= 150 +
7119896 and 120598 = 02 As shown in Figures 7 and 8 the 1-norm of allof 119909119894reaches to a consensus gradually and converges to 119909
1
1198901198942converges to zero whichmeans all of the node filters are
stable and satisfactory estimates of the actual signal 119909 can beobtained
5 Conclusion
This paper has demonstrated an effective approach to theproblem of distributed sparse signal estimation in sensornetworks The filter has been designed by introducing thepseudomeasurement equation into the Kalman-consensusfilter A dynamic parameter selection strategy has been dis-cussed to improve the performance of the existed algorithmSome numerical examples have verified the effectiveness ofthe proposed method In the future we will try to test our
Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
KCIF-PM algorithm in some real-world applications such asvisual surveillance with multiple cameras or dynamic sparsesignal tracking in wireless networks
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by National Natural Science Foun-dation of China (Grant no 61305128) and the FundamentalResearch Funds for the Central Universities of China (Grantno 3132014214)
References
[1] E J Candes J Romberg and T Tao ldquoRobust uncertaintyprinciples exact signal reconstruction from highly incompletefrequency informationrdquo IEEE Transactions on InformationThe-ory vol 52 no 2 pp 489ndash509 2006
[2] T T Cai and LWang ldquoOrthogonal matching pursuit for sparsesignal recovery with noiserdquo IEEE Transactions on InformationTheory vol 57 no 7 pp 4680ndash4688 2011
[3] G Chinn P D Olcott and C S Levin ldquoSparse signal recoverymethods formultiplexing PET detector readoutrdquo IEEE Transac-tions on Medical Imaging vol 32 no 5 pp 932ndash942 2013
[4] E Karseras K Leung and W Dai ldquoTracking dynamic sparsesignals using Hierarchical Bayesian Kalman filtersrdquo in Proceed-ings of the IEEE International Conference on Acoustics Speechand Signal Processing (ICASSP rsquo13) pp 6546ndash6550 VancouverCanada 2013
[5] N Vaswani ldquoKalman filtered compressed sensingrdquo in Proceed-ings of the IEEE International Conference on Image Processing(ICIP rsquo08) pp 893ndash896 San Diego Calif USA October 2008
[6] A Carmi P Gurfil and D Kanevsky ldquoMethods for sparsesignal recovery using Kalman filtering with embedded pseudo-measurement norms and quasi-normsrdquo IEEE Transactions onSignal Processing vol 58 no 4 pp 2405ndash2409 2010
[7] A Charles and C Rozell ldquoDynamic filtering of sparse signalsusing reweighted ℓ
1rdquo in Proceedings of the IEEE International
Conference on Acoustics Speech and Signal Processing (ICASSPrsquo13) pp 6451ndash6455 Vancouver Canada 2013
[8] F Cattivelli C Lopes and A Sayed ldquoDiffusion strategiesfor distributed Kalman filtering formulation and performanceanalysisrdquo in Proceedings of the Cognitive Information Processingpp 36ndash41 Santorini Greece 2008
[9] F S Cattivelli and A H Sayed ldquoDiffusion strategies fordistributedKalman filtering and smoothingrdquo IEEETransactionson Automatic Control vol 55 no 9 pp 2069ndash2084 2010
[10] P Di Lorenzo and A H Sayed ldquoSparse distributed learningbased on diffusion adaptationrdquo IEEE Transactions on SignalProcessing vol 61 no 6 pp 1419ndash1433 2013
[11] R Olfati-Saber ldquoDistributed Kalman filtering for sensor net-worksrdquo in Proceedings of the 46th IEEE Conference on Decisionand Control (CDC rsquo07) pp 5492ndash5498 Los Angeles Calif USADecember 2007
[12] R Olfati-Saber ldquoKalman-Consensus filter optimality stabilityand performancerdquo in Proceedings of the 48th IEEE Conference
on Decision and Control held jointly with 28th Chinese ControlConference (CDCCCC rsquo09) pp 7036ndash7042 Shanghai ChinaDecember 2009
[13] E J Candes and M B Wakin ldquoAn introduction to compressivesampling a sensingsampling paradigm that goes against thecommon knowledge in data acquisitionrdquo IEEE Signal ProcessingMagazine vol 25 no 2 pp 21ndash30 2008
[14] D Kanevsky A Carmi L Horesh P Gurfil B Ramabhadranand T N Sainath ldquoKalman filtering for compressed sensingrdquo inProceedings of the 13thConference on Information Fusion (Fusionrsquo10) pp 1ndash8 Edinburgh UK July 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of