Research Article Average Consensus Analysis of Distributed...
8
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 505848, 7 pages http://dx.doi.org/10.1155/2013/505848 Research Article Average Consensus Analysis of Distributed Inference with Uncertain Markovian Transition Probability Won Il Kim, 1,2 Rong Xiong, 1 Qiuguo Zhu, 1 and Jun Wu 1 1 State Key Laboratory of Industrial Control Technology, Zhejiang University, Hangzhou 310027, China 2 Kimchaek Industry University, Pyongyang 999093, Democratic People’s Republic of Korea Correspondence should be addressed to Rong Xiong; [email protected] Received 18 June 2013; Revised 9 October 2013; Accepted 29 October 2013 Academic Editor: Shuli Sun Copyright © 2013 Won Il Kim et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e average consensus problem of distributed inference in a wireless sensor network under Markovian communication topology of uncertain transition probability is studied. A sufficient condition for average consensus of linear distributed inference algorithm is presented. Based on linear matrix inequalities and numerical optimization, a design method of fast distributed inference is provided. 1. Introduction During the past few decades, consensus problems of multia- gent systems by information exchange have been extensively studied by many researchers, due to their widespread appli- cations in autonomous spacecraſt, unmanned air vehicles, mobile robots, and distributed sensor networks. Olfati-Saber and Murray introduced in [1, 2] a theoretical framework for solving consensus problems. In [3, 4], consensus problems of first-order integrator systems were proposed based on algebra graph theory. In [5, 6], consensus problems of directed second-order systems were presented. In [5], the authors pro- vided necessary and sufficient condition for reaching mean square consensus of discrete-time second order systems. Consensus conditions were studied in [6] of continuous- time second order systems by Linear Matrix Inequality (LMI) approach. Among consensus problems, the average consensus prob- lem is challenging which requires distributed computation of the average of the initial state of a network [1, 2]. For a strongly connected network, [1] proved that the average consensus problem is solvable if and only if the network is balanced. e discrete-time average consensus plays a key role in distributed inference in sensor networks. In networks of fixed topology, [7] gave necessary and sufficient conditions for linear distributed inference to achieve aver- age consensus. A design method was presented in [7] to implement linear distributed inference of fastest consensus. Because of noisy communication channels, link failures oſten occur in a real network. erefore, it is meaningful to study distributed inference in networks of swing topology. rough a common Lyapunov function, a result of [1] stated that distributed inference reaches average consensus in a network of swing topology if the network holds strongly connected and balanced topology. Reference [8] modeled a network of swing topology using a Bernoulli process and established a necessary and sufficient condition for average consensus of distributed inference. e condition is related to a mean Laplacian matrix. e Bernoulli process in [8] means that the network link failure events are temporally independent. From the viewpoint of engineering, it is more reasonable to consider network link failures of temporal independence. e most famous and most tractable stochastic process of temporal independence is Markovian chain in which any future event is independent of the past events and depends only on the present event. is motivates us to model a network of swing topology using a Markovian chain and hence to study distributed inference using Markovian jump linear system method [9–12]. In practice, transition probabilities of a Markovian chain are not known precisely a priori, and only estimated values of transition probabilities are available. Hence, this paper thinks of networks with Markovian com- munication of uncertain transition probability.
Transcript of Research Article Average Consensus Analysis of Distributed...

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 505848 7 pageshttpdxdoiorg1011552013505848
Research ArticleAverage Consensus Analysis of Distributed Inference withUncertain Markovian Transition Probability
Won Il Kim12 Rong Xiong1 Qiuguo Zhu1 and Jun Wu1
1 State Key Laboratory of Industrial Control Technology Zhejiang University Hangzhou 310027 China2 Kimchaek Industry University Pyongyang 999093 Democratic Peoplersquos Republic of Korea
Correspondence should be addressed to Rong Xiong rxiongiipczjueducn
Received 18 June 2013 Revised 9 October 2013 Accepted 29 October 2013
Academic Editor Shuli Sun
Copyright copy 2013 Won Il Kim et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The average consensus problem of distributed inference in a wireless sensor network underMarkovian communication topology ofuncertain transition probability is studied A sufficient condition for average consensus of linear distributed inference algorithm ispresented Based on linearmatrix inequalities andnumerical optimization a designmethod of fast distributed inference is provided
1 Introduction
During the past few decades consensus problems of multia-gent systems by information exchange have been extensivelystudied by many researchers due to their widespread appli-cations in autonomous spacecraft unmanned air vehiclesmobile robots and distributed sensor networks Olfati-Saberand Murray introduced in [1 2] a theoretical framework forsolving consensus problems In [3 4] consensus problems offirst-order integrator systemswere proposed based on algebragraph theory In [5 6] consensus problems of directedsecond-order systems were presented In [5] the authors pro-vided necessary and sufficient condition for reaching meansquare consensus of discrete-time second order systemsConsensus conditions were studied in [6] of continuous-time second order systems by LinearMatrix Inequality (LMI)approach
Among consensus problems the average consensus prob-lem is challenging which requires distributed computationof the average of the initial state of a network [1 2] Fora strongly connected network [1] proved that the averageconsensus problem is solvable if and only if the networkis balanced The discrete-time average consensus plays akey role in distributed inference in sensor networks Innetworks of fixed topology [7] gave necessary and sufficientconditions for linear distributed inference to achieve aver-age consensus A design method was presented in [7] to
implement linear distributed inference of fastest consensusBecause of noisy communication channels link failures oftenoccur in a real network Therefore it is meaningful to studydistributed inference in networks of swing topologyThrougha common Lyapunov function a result of [1] stated thatdistributed inference reaches average consensus in a networkof swing topology if the network holds strongly connectedand balanced topology Reference [8] modeled a networkof swing topology using a Bernoulli process and establisheda necessary and sufficient condition for average consensusof distributed inference The condition is related to a meanLaplacian matrix
The Bernoulli process in [8] means that the networklink failure events are temporally independent From theviewpoint of engineering it is more reasonable to considernetwork link failures of temporal independence The mostfamous and most tractable stochastic process of temporalindependence is Markovian chain in which any future eventis independent of the past events and depends only onthe present event This motivates us to model a networkof swing topology using a Markovian chain and hence tostudy distributed inference using Markovian jump linearsystem method [9ndash12] In practice transition probabilitiesof a Markovian chain are not known precisely a priori andonly estimated values of transition probabilities are availableHence this paper thinks of networks with Markovian com-munication of uncertain transition probability
2 Mathematical Problems in Engineering
In fact in the research on networked control systemsMarkovian chain has been used by several authors todescribe random communication in networks Reference[13] provided packet-loss model by Markovian chain in119867infin
networked control Under network communication ofupdate times driven by Markovian chain [14] gave stabil-ity conditions of model-based networked control systemsNetworked control systems with bounded packet losses andtransmission delays aremodeled throughMarkovian chain in[15]The networked predictive control system in [16] adopted2 Markovian chains to express date transmission in boththe controller-actuator channel and the sensor-controllerchannel
In this paperZ is used to denote the set of all nonnegativeintegersThe real identitymatrix of 119899times119899 is denoted by 119868
119899 Let 1
be the vector whose elements are all equal to 1The Euclideannorm is denoted by ∙ If a matrix 119875 is positive (negative)definite it is denoted by 119875 gt 0(lt0) The notation ⋇ withina matrix represents the symmetric term of the matrix Theexpected value is represented by 119864[∙]
The paper is organized as follows Section 2 containsa description of the network and linear distributed infer-ence Section 3 presents average consensus conditions and adesignmethodNumerical simulation results are in Section 4Finally Section 5 draws conclusions
2 Network Description
Consider distributed inference in a wireless sensor networkconsisting of 119899 sensor Each sensor 119894 isin 119873 ≜ 1 2 119899
collects a local measurement 119910119894isin R about the situation of
environment It is assumed that these local measurements1199101 1199102 119910
119899are independent and identically distributed
random variables The goal of inference is for all sensors toreach the global measurement
119910 =1
119899
119899
sum
119894=1
119910119894
(1)
such that the true situation of environment can be monitoredconvincingly
This paper studies iterative distributed inference Define
119880 = (119904 119905) | 119904 lt 119905 119904 isin 119873 119905 isin 119873 (2)
which includes all realizable undirected links in the wirelesssensor network At the 119896th iteration 119896 isin Z the successfulcommunication links in the wireless sensor network aredescribed by the set
119864 (119896) sub 119880 (3)
A pair (1199041 1199051) isin 119864(119896) means that the sensors 119904
1and 119905
1
communicate with each other at 119896 A pair (1199042 1199052) isin 119880
but (1199042 1199052) notin 119864(119896) means that there is no communication
link between the sensors 1199042and 119905
2at 119896 Due to noisy
communication channels and limited network power budget119864(119896) is assumed to be random and to be modeled as followsGiven 119898 distinct subsets 119865
1 1198652 119865
119898sub 119880 Let 120579
119896be
a stochastic process taking values in 119872 = 1 2 119898 anddriven by aMarkov chain with a transition probability matrixΓ = [120574
ℎ119897] isin R119898times119898 where 120574
ℎ119897= Pr(120579
119896+1= 119897 | 120579
119896= ℎ) for all
ℎ isin 119872 for all 119897 isin 119872 However these 120574ℎ119897s are not known
precisely Each 120574ℎ119897is expressed as
120574ℎ119897= 120574ℎ119897+ Δ120574ℎ119897 (4)
with a known 120574ℎ119897and a unknownΔ120574
ℎ119897whose absolute value is
less than a given positive constant 2120587ℎ119897 For any for all ℎ isin 119872
sum119898
119897=1120574ℎ119897= 1 and sum119898
119897=1Δ120574ℎ119897= 0 This paper models
119864 (119896) = 119865120579119896 (5)
The neighborhood of sensor 119894 at 119896 is denoted by
Ω119894(119896) = 119895 isin 119873 | (119894 119895) isin 119865
120579119896or (119895 119894) isin 119865
120579119896 (6)
and the element number of set Ω119894(119896) is denoted by 119889
119894(119896)
For sensor 119894 set its initial state 119909119894(0) = 119910
119894 At the
119896th iteration each sensor 119894 obtains its neighborsrsquo states andupdates its state using the following linear iteration law
119909119894(119896 + 1) = 119909
119894(119896) + 120572 sum
119895isinΩ119894(119896)
(119909119895(119896) minus 119909
119894(119896))
119894 isin 119873
(7)
where 120572 gt 0 is the weight parameter which is assignedby designers Our study on the above distributed inferencehas two objectives one is to derive a condition on theconvergence of 119909
119894(119896) to 119910 in the sense of mean square the
other is how to find 120572 such that a fast convergence is achieved
3 Average Consensus Analysis
31 Convergence Condition Denote
119909 (119896) =
[[[[
[
1199091(119896)
1199092(119896)
119909119899(119896)
]]]]
]
isin R119899
(8)
The system in Section 2 can be described as
119909 (119896 + 1) = 119882(120572 120579119896) 119909 (119896) 119896 isin Z
119909 (0) = [11991011199102sdot sdot sdot 119910119899]119879
(9)
where119882(120572 120579119896) is a 119899 times 119899 matrix with entries 119908
119894119895(120572 120579119896) For
119894 = 119895
119908119894119895(120572 120579119896) =
120572 when 119895 isin Ω119894(119896)
0 when 119895 notin Ω119894(119896) (10)
For 119894 = 119895
119908119894119894(120572 120579119896) = 1 minus 120572119889
119894(119896) (11)
Mathematical Problems in Engineering 3
1 2 3 4 51 2 3 4 5
678910 678910
1 2 3 4 5
678910
(1) (2) (3)
Figure 1 Three communication situations
05
04
03
02
01
0
minus01
minus02
0 01 02 03 04 05 06
120572
120588
Figure 2 Graph of 120588(120572)
0 10 20 30 40 50142
144
146
148
15
152
154
156
158
k
State
Figure 3 State curve when 120572opt = 04812
From (2)sim(6) it is seen that 119894 isin Ω119895(119896) if and only if 119895 isin Ω
119894(119896)
and hence
119882(120572 120579119896) = 119882
119879
(120572 120579119896) (12)
Furthermore (10)sim(12) imply that for all 119896 isin Z
1119879119882(120572 120579119896) = 1119879
119882 (120572 120579119896) 1 = 1
(13)
142
144
146
148
15
152
154
156
158
State
0 10 20 30 40 50k
Figure 4 State curve when 1205721= 05528
0 10 20 30 40 50142
144
146
148
15
152
154
156
158
k
State
Figure 5 State curve when 1205722= 05359
Then we have
119882(120572 120579119896) 1199101 = 119910119882(120572 120579
119896) 1 = 1199101 (14)
1
11989911119879119909 (119896 + 1) = 1
11989911119879119882(120572 120579
119896) 119909 (119896) =
1
11989911119879119909 (119896)
(15)
which means that for all 119896 isin Z1
11989911119879119909 (119896) = 1
11989911119879119909 (119896 minus 1) = sdot sdot sdot = 1
11989911119879119909 (0) = 1199101
(16)
4 Mathematical Problems in Engineering
Denote 119890(119896) = 119909(119896) minus 1199101 The iterative distributed inferenceis said to be average consensus in mean square sense iflim119896rarrinfin
119864[119890(119896)2
] = 0 for any initial condition 119909(0) isin R119899
and 1205790isin 119872
Theorem 1 The linear distributed inference (7) reaches aver-age consensus by choice of 120572 if there exist m positive definitematrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎlt 0
(17)
with 119876(120572 ℎ) = 119882(120572 ℎ) minus 111989911119879
Proof Assume 120579119896= ℎ isin 119872 at time step 119896 From (9) (14) and
(16) one has
119890 (119896 + 1) = 119909 (119896 + 1) minus 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896) + 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896)
+1
119899111198791199101
= (119882(120572 ℎ) minus1
11989911119879) (119909 (119896) minus 1199101)
= 119876 (120572 ℎ) 119890 (119896)
(18)
We now consider the stochastic Lyapunov function
119881 (119890 (119896) 120579119896) = 119890119879
(119896) 119875120579119896119890 (119896) (19)
Then for all 120579119896= ℎ isin 119872 we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) minus 119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
(120574ℎ119897+Δ120574ℎ119897) 119875119897119876 (120572 ℎ)minus119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times (
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875119897+ Δ120574ℎℎ119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1119897 = ℎ
Δ120574ℎ119897119875119897minus
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897(119875119897minus 119875ℎ))
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1
4Δ1205742
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1205872
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+119876119879
(120572 ℎ)
119898
sum
119897=1
(119875119897minus 119875ℎ)2
119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
(20)
Denote
Θℎ= 119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎ
(21)
When the conditions inTheorem 1 are satisfied we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
le minus120582min (minusΘℎ) 119890 (119896)2
le minus120578119890 (119896)2
(22)
where 120582min(minusΘℎ) denotes theminimal eigenvalue ofminusΘℎand
120578 = inf 120582min (minusΘℎ) ℎ isin 119872 (23)
Mathematical Problems in Engineering 5
Therefore for all 119890(0) isin R119899 for all 1205790isin 119872 for all 119879 isin Z
119879
sum
119896=0
119864 [119890 (119896)2
] le1
120578
119879
sum
119896=0
(119864 [119881 (119890 (119896) 120579119896)]
minus119864 [119881 (119890 (119896 + 1) 120579119896+1)])
le1
120578(119881 (119890 (0) 120579
0) minus 119864 [119881 (119890 (119879 + 1) 120579
119879+1)])
le1
120578119881 (119890 (0) 120579
0)
(24)
This means lim119896rarrinfin
119864[119890(119896)2
] = 0
32 Optimal Design From the above proof it is seen thatthe conditions in Theorem 1 result in not only lim
119896rarrinfin119864 [
119890(119896)2
] = 0 but also decreasing 119864[119881(119890(119896) 120579119896)] Moreover
lim119896rarrinfin
119864[ 119890(119896)2
] = 0 implies lim119896rarrinfin
119864[119881(119890(119896) 120579119896)] = 0
that is 119864[119881(119890(119896) 120579119896)] also converges to zero Therefore the
decrease rate of 119864[119881(119890(119896) 120579119896)] can express the convergence
speed of distributed inference The following theorem isabout the decrease rate of 119864[119881(119890(119896) 120579
119896)]
Theorem 2 Given 120572 gt 0 and 120588 isin R if there exist m positivedefinite matrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
[[[[[[[
[
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) minus (1 + 120588) 119875
ℎ⋇
(119875ℎminus 1198751) 119876 (120572 ℎ)
minus119868119898119899
(119875ℎminus 119875119898) 119876 (120572 ℎ)
]]]]]]]
]
lt 0 (25)
then in linear distributed inference (7) for any nonzero 119890(119896) isinR119899
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (26)
Proof According to Schur complement [17] condition (25)can be rewritten as
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)2
)119876 (120572 ℎ) minus (1 + 120588) 119875ℎlt 0
(27)
From (27) for any nonzero 119890(119896) isin R119899 one has
119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)
2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
lt 120588119890119879
(119896) 119875ℎ119890 (119896)
(28)
for all 120579119896= ℎ isin 119872 and for all 120579
119896+1= 119897 isin 119872 From (28) (19)
and (20) it is known that119864 [119881 (119890 (119896 + 1) 120579
119896+1| 119890 (119896) 120579
119896)]
minus 119881 (119890 (119896) 120579119896) lt 120588119881 (119890 (119896) 120579
119896)
(29)
and hence
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (30)
Condition (25) in Theorem 2 is a LMI We denote condi-tion (25) as Ξ(120572 120588) lt 0 and for any 120572 gt 0 define
120588 (120572) = inf 120588 | 120588 isin R Ξ (120572 120588) lt 0 has solutions (31)
Using the LMI toolbox of MATLAB 120588(120572) can be computedby Algorithm 1
For a 120572 gt 0with 120588 lt 0 it is known fromTheorems 1 and 2that linear distributed inference (7) is average consensus andthat 120588 is a bound of convergence speed Since a less value of120588 lt 0 gives a faster convergence speed the fast distributedinference problem is addressed as
120583 = inf120572gt0
120588 (120572) (32)
which is an unconstrainted optimization problem of only onevariable Many existing numerical optimizationmethods [18]can be utilized to solve this problem efficiently When 120583 lt 0the optimal parameter
120572opt = arginf120572gt0
120588 (120572) (33)
provides a fast linear distributed inference which reachesaverage consensus
6 Mathematical Problems in Engineering
Choose TOL gt 0Choose enough large 120588
1isin R such that Ξ(120572 120588
1) has solutions
Choose enough small 1205882isin R such that Ξ(120572 120588
2) has no solution
repeat until 1205881minus 1205882lt TOL
1205880larr (1205881+ 1205882)2
Solve Ξ(120572 1205880) lt 0
if Ξ(120572 1205880) lt 0 has solutions
1205881larr 1205880
else1205882larr 1205880
end (repeat)Set 120588(120572) larr 120588
1
Algorithm 1
4 Numerical Example
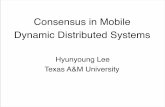
In this section we present simulation results for averageconsensus of distributed inference in a simple sensor net-work The network has 10 sensor nodes and switched inthree possible communication situations Figure 1 illustrates3 communication situations The estimated transition proba-bilities of 120579
119896is
Γ = [120574ℎ119897] = [
[
07 02 01
045 03 025
05 01 04
]
]
(34)
The estimate error Δ120574ℎ119897satisfies
1003816100381610038161003816Δ120574ℎ1198971003816100381610038161003816 le 2120587ℎ119897 = 01 forallℎ isin 1 2 3 forall119897 isin 1 2 3 (35)
Using the computation procedure in Section 3 the optimiza-tion problem (32) is solved Graph of 120588(120572) is displayed inFigure 2 The result is 120583 = minus02407 lt 0 and 120572opt = 04812For the communication situation in Figure 1(1) we use thedesign method in [7] of minimizing asymptotic convergencefactor and obtain 120572
1= 05528 The design method in [7]
is also applied to the other 2 situations in Figure 1 and get1205722= 1205723= 05359
In order to compare our method with that in [7] theinitial states of each sensor node is selected as
119909 (0) = [11991011199102119910311991041199105119910611991071199108119910911991010]119879
= [152 146 143 156 153 145 157 149 151 148]119879
(36)
Thus from (1) we have 119910 = 15 The real transition probabilitymatrix is set as
Γ = [120574ℎ119897] = [
[
068 024 008
04 027 033
053 011 036
]
]
(37)
Figures 3 4 and 5 show state curves of all sensor nodesunder 120572opt 1205721 and 1205722 respectively It can be seen that allsensor states convergence to 119910 = 15 and that our 120572opt hasfaster convergence rate than 120572
1or 1205722has Achieving faster
convergence is because our method considers the randomswitching among the 3 communication situations while [7]rsquosmethod considers only 1 communication situation
5 Conclusion
The distributed average consensus problem in sensor net-works has been studied under a Markovian switching com-munication topology of uncertain transition probabilities
Stochastic Lyapunov functions have been employed to inves-tigate average consensus of linear distributed inference Asufficient condition of average consensus has been proposedbased on feasibility of a set of coupled LMIs The designproblem of fast distributed inference has been solved bynumerical optimization techniques
Acknowledgment
This work was supported by 973 Program of China (Grant2009CB320603)
References
[1] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[2] R Olfati-Saber and R M Murray ldquoConsensus protocols fornetworks of dynamic agentsrdquo in Proceedings of the AmericanControl Conference pp 951ndash956 June 2003
Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
In fact in the research on networked control systemsMarkovian chain has been used by several authors todescribe random communication in networks Reference[13] provided packet-loss model by Markovian chain in119867infin
networked control Under network communication ofupdate times driven by Markovian chain [14] gave stabil-ity conditions of model-based networked control systemsNetworked control systems with bounded packet losses andtransmission delays aremodeled throughMarkovian chain in[15]The networked predictive control system in [16] adopted2 Markovian chains to express date transmission in boththe controller-actuator channel and the sensor-controllerchannel
In this paperZ is used to denote the set of all nonnegativeintegersThe real identitymatrix of 119899times119899 is denoted by 119868
119899 Let 1
be the vector whose elements are all equal to 1The Euclideannorm is denoted by ∙ If a matrix 119875 is positive (negative)definite it is denoted by 119875 gt 0(lt0) The notation ⋇ withina matrix represents the symmetric term of the matrix Theexpected value is represented by 119864[∙]
The paper is organized as follows Section 2 containsa description of the network and linear distributed infer-ence Section 3 presents average consensus conditions and adesignmethodNumerical simulation results are in Section 4Finally Section 5 draws conclusions
2 Network Description
Consider distributed inference in a wireless sensor networkconsisting of 119899 sensor Each sensor 119894 isin 119873 ≜ 1 2 119899
collects a local measurement 119910119894isin R about the situation of
environment It is assumed that these local measurements1199101 1199102 119910
119899are independent and identically distributed
random variables The goal of inference is for all sensors toreach the global measurement
119910 =1
119899
119899
sum
119894=1
119910119894
(1)
such that the true situation of environment can be monitoredconvincingly
This paper studies iterative distributed inference Define
119880 = (119904 119905) | 119904 lt 119905 119904 isin 119873 119905 isin 119873 (2)
which includes all realizable undirected links in the wirelesssensor network At the 119896th iteration 119896 isin Z the successfulcommunication links in the wireless sensor network aredescribed by the set
119864 (119896) sub 119880 (3)
A pair (1199041 1199051) isin 119864(119896) means that the sensors 119904
1and 119905
1
communicate with each other at 119896 A pair (1199042 1199052) isin 119880
but (1199042 1199052) notin 119864(119896) means that there is no communication
link between the sensors 1199042and 119905
2at 119896 Due to noisy
communication channels and limited network power budget119864(119896) is assumed to be random and to be modeled as followsGiven 119898 distinct subsets 119865
1 1198652 119865
119898sub 119880 Let 120579
119896be
a stochastic process taking values in 119872 = 1 2 119898 anddriven by aMarkov chain with a transition probability matrixΓ = [120574
ℎ119897] isin R119898times119898 where 120574
ℎ119897= Pr(120579
119896+1= 119897 | 120579
119896= ℎ) for all
ℎ isin 119872 for all 119897 isin 119872 However these 120574ℎ119897s are not known
precisely Each 120574ℎ119897is expressed as
120574ℎ119897= 120574ℎ119897+ Δ120574ℎ119897 (4)
with a known 120574ℎ119897and a unknownΔ120574
ℎ119897whose absolute value is
less than a given positive constant 2120587ℎ119897 For any for all ℎ isin 119872
sum119898
119897=1120574ℎ119897= 1 and sum119898
119897=1Δ120574ℎ119897= 0 This paper models
119864 (119896) = 119865120579119896 (5)
The neighborhood of sensor 119894 at 119896 is denoted by
Ω119894(119896) = 119895 isin 119873 | (119894 119895) isin 119865
120579119896or (119895 119894) isin 119865
120579119896 (6)
and the element number of set Ω119894(119896) is denoted by 119889
119894(119896)
For sensor 119894 set its initial state 119909119894(0) = 119910
119894 At the
119896th iteration each sensor 119894 obtains its neighborsrsquo states andupdates its state using the following linear iteration law
119909119894(119896 + 1) = 119909
119894(119896) + 120572 sum
119895isinΩ119894(119896)
(119909119895(119896) minus 119909
119894(119896))
119894 isin 119873
(7)
where 120572 gt 0 is the weight parameter which is assignedby designers Our study on the above distributed inferencehas two objectives one is to derive a condition on theconvergence of 119909
119894(119896) to 119910 in the sense of mean square the
other is how to find 120572 such that a fast convergence is achieved
3 Average Consensus Analysis
31 Convergence Condition Denote
119909 (119896) =
[[[[
[
1199091(119896)
1199092(119896)
119909119899(119896)
]]]]
]
isin R119899
(8)
The system in Section 2 can be described as
119909 (119896 + 1) = 119882(120572 120579119896) 119909 (119896) 119896 isin Z
119909 (0) = [11991011199102sdot sdot sdot 119910119899]119879
(9)
where119882(120572 120579119896) is a 119899 times 119899 matrix with entries 119908
119894119895(120572 120579119896) For
119894 = 119895
119908119894119895(120572 120579119896) =
120572 when 119895 isin Ω119894(119896)
0 when 119895 notin Ω119894(119896) (10)
For 119894 = 119895
119908119894119894(120572 120579119896) = 1 minus 120572119889
119894(119896) (11)
Mathematical Problems in Engineering 3
1 2 3 4 51 2 3 4 5
678910 678910
1 2 3 4 5
678910
(1) (2) (3)
Figure 1 Three communication situations
05
04
03
02
01
0
minus01
minus02
0 01 02 03 04 05 06
120572
120588
Figure 2 Graph of 120588(120572)
0 10 20 30 40 50142
144
146
148
15
152
154
156
158
k
State
Figure 3 State curve when 120572opt = 04812
From (2)sim(6) it is seen that 119894 isin Ω119895(119896) if and only if 119895 isin Ω
119894(119896)
and hence
119882(120572 120579119896) = 119882
119879
(120572 120579119896) (12)
Furthermore (10)sim(12) imply that for all 119896 isin Z
1119879119882(120572 120579119896) = 1119879
119882 (120572 120579119896) 1 = 1
(13)
142
144
146
148
15
152
154
156
158
State
0 10 20 30 40 50k
Figure 4 State curve when 1205721= 05528
0 10 20 30 40 50142
144
146
148
15
152
154
156
158
k
State
Figure 5 State curve when 1205722= 05359
Then we have
119882(120572 120579119896) 1199101 = 119910119882(120572 120579
119896) 1 = 1199101 (14)
1
11989911119879119909 (119896 + 1) = 1
11989911119879119882(120572 120579
119896) 119909 (119896) =
1
11989911119879119909 (119896)
(15)
which means that for all 119896 isin Z1
11989911119879119909 (119896) = 1
11989911119879119909 (119896 minus 1) = sdot sdot sdot = 1
11989911119879119909 (0) = 1199101
(16)
4 Mathematical Problems in Engineering
Denote 119890(119896) = 119909(119896) minus 1199101 The iterative distributed inferenceis said to be average consensus in mean square sense iflim119896rarrinfin
119864[119890(119896)2
] = 0 for any initial condition 119909(0) isin R119899
and 1205790isin 119872
Theorem 1 The linear distributed inference (7) reaches aver-age consensus by choice of 120572 if there exist m positive definitematrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎlt 0
(17)
with 119876(120572 ℎ) = 119882(120572 ℎ) minus 111989911119879
Proof Assume 120579119896= ℎ isin 119872 at time step 119896 From (9) (14) and
(16) one has
119890 (119896 + 1) = 119909 (119896 + 1) minus 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896) + 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896)
+1
119899111198791199101
= (119882(120572 ℎ) minus1
11989911119879) (119909 (119896) minus 1199101)
= 119876 (120572 ℎ) 119890 (119896)
(18)
We now consider the stochastic Lyapunov function
119881 (119890 (119896) 120579119896) = 119890119879
(119896) 119875120579119896119890 (119896) (19)
Then for all 120579119896= ℎ isin 119872 we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) minus 119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
(120574ℎ119897+Δ120574ℎ119897) 119875119897119876 (120572 ℎ)minus119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times (
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875119897+ Δ120574ℎℎ119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1119897 = ℎ
Δ120574ℎ119897119875119897minus
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897(119875119897minus 119875ℎ))
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1
4Δ1205742
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1205872
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+119876119879
(120572 ℎ)
119898
sum
119897=1
(119875119897minus 119875ℎ)2
119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
(20)
Denote
Θℎ= 119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎ
(21)
When the conditions inTheorem 1 are satisfied we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
le minus120582min (minusΘℎ) 119890 (119896)2
le minus120578119890 (119896)2
(22)
where 120582min(minusΘℎ) denotes theminimal eigenvalue ofminusΘℎand
120578 = inf 120582min (minusΘℎ) ℎ isin 119872 (23)
Mathematical Problems in Engineering 5
Therefore for all 119890(0) isin R119899 for all 1205790isin 119872 for all 119879 isin Z
119879
sum
119896=0
119864 [119890 (119896)2
] le1
120578
119879
sum
119896=0
(119864 [119881 (119890 (119896) 120579119896)]
minus119864 [119881 (119890 (119896 + 1) 120579119896+1)])
le1
120578(119881 (119890 (0) 120579
0) minus 119864 [119881 (119890 (119879 + 1) 120579
119879+1)])
le1
120578119881 (119890 (0) 120579
0)
(24)
This means lim119896rarrinfin
119864[119890(119896)2
] = 0
32 Optimal Design From the above proof it is seen thatthe conditions in Theorem 1 result in not only lim
119896rarrinfin119864 [
119890(119896)2
] = 0 but also decreasing 119864[119881(119890(119896) 120579119896)] Moreover
lim119896rarrinfin
119864[ 119890(119896)2
] = 0 implies lim119896rarrinfin
119864[119881(119890(119896) 120579119896)] = 0
that is 119864[119881(119890(119896) 120579119896)] also converges to zero Therefore the
decrease rate of 119864[119881(119890(119896) 120579119896)] can express the convergence
speed of distributed inference The following theorem isabout the decrease rate of 119864[119881(119890(119896) 120579
119896)]
Theorem 2 Given 120572 gt 0 and 120588 isin R if there exist m positivedefinite matrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
[[[[[[[
[
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) minus (1 + 120588) 119875
ℎ⋇
(119875ℎminus 1198751) 119876 (120572 ℎ)
minus119868119898119899
(119875ℎminus 119875119898) 119876 (120572 ℎ)
]]]]]]]
]
lt 0 (25)
then in linear distributed inference (7) for any nonzero 119890(119896) isinR119899
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (26)
Proof According to Schur complement [17] condition (25)can be rewritten as
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)2
)119876 (120572 ℎ) minus (1 + 120588) 119875ℎlt 0
(27)
From (27) for any nonzero 119890(119896) isin R119899 one has
119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)
2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
lt 120588119890119879
(119896) 119875ℎ119890 (119896)
(28)
for all 120579119896= ℎ isin 119872 and for all 120579
119896+1= 119897 isin 119872 From (28) (19)
and (20) it is known that119864 [119881 (119890 (119896 + 1) 120579
119896+1| 119890 (119896) 120579
119896)]
minus 119881 (119890 (119896) 120579119896) lt 120588119881 (119890 (119896) 120579
119896)
(29)
and hence
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (30)
Condition (25) in Theorem 2 is a LMI We denote condi-tion (25) as Ξ(120572 120588) lt 0 and for any 120572 gt 0 define
120588 (120572) = inf 120588 | 120588 isin R Ξ (120572 120588) lt 0 has solutions (31)
Using the LMI toolbox of MATLAB 120588(120572) can be computedby Algorithm 1
For a 120572 gt 0with 120588 lt 0 it is known fromTheorems 1 and 2that linear distributed inference (7) is average consensus andthat 120588 is a bound of convergence speed Since a less value of120588 lt 0 gives a faster convergence speed the fast distributedinference problem is addressed as
120583 = inf120572gt0
120588 (120572) (32)
which is an unconstrainted optimization problem of only onevariable Many existing numerical optimizationmethods [18]can be utilized to solve this problem efficiently When 120583 lt 0the optimal parameter
120572opt = arginf120572gt0
120588 (120572) (33)
provides a fast linear distributed inference which reachesaverage consensus
6 Mathematical Problems in Engineering
Choose TOL gt 0Choose enough large 120588
1isin R such that Ξ(120572 120588
1) has solutions
Choose enough small 1205882isin R such that Ξ(120572 120588
2) has no solution
repeat until 1205881minus 1205882lt TOL
1205880larr (1205881+ 1205882)2
Solve Ξ(120572 1205880) lt 0
if Ξ(120572 1205880) lt 0 has solutions
1205881larr 1205880
else1205882larr 1205880
end (repeat)Set 120588(120572) larr 120588
1
Algorithm 1
4 Numerical Example
In this section we present simulation results for averageconsensus of distributed inference in a simple sensor net-work The network has 10 sensor nodes and switched inthree possible communication situations Figure 1 illustrates3 communication situations The estimated transition proba-bilities of 120579
119896is
Γ = [120574ℎ119897] = [
[
07 02 01
045 03 025
05 01 04
]
]
(34)
The estimate error Δ120574ℎ119897satisfies
1003816100381610038161003816Δ120574ℎ1198971003816100381610038161003816 le 2120587ℎ119897 = 01 forallℎ isin 1 2 3 forall119897 isin 1 2 3 (35)
Using the computation procedure in Section 3 the optimiza-tion problem (32) is solved Graph of 120588(120572) is displayed inFigure 2 The result is 120583 = minus02407 lt 0 and 120572opt = 04812For the communication situation in Figure 1(1) we use thedesign method in [7] of minimizing asymptotic convergencefactor and obtain 120572
1= 05528 The design method in [7]
is also applied to the other 2 situations in Figure 1 and get1205722= 1205723= 05359
In order to compare our method with that in [7] theinitial states of each sensor node is selected as
119909 (0) = [11991011199102119910311991041199105119910611991071199108119910911991010]119879
= [152 146 143 156 153 145 157 149 151 148]119879
(36)
Thus from (1) we have 119910 = 15 The real transition probabilitymatrix is set as
Γ = [120574ℎ119897] = [
[
068 024 008
04 027 033
053 011 036
]
]
(37)
Figures 3 4 and 5 show state curves of all sensor nodesunder 120572opt 1205721 and 1205722 respectively It can be seen that allsensor states convergence to 119910 = 15 and that our 120572opt hasfaster convergence rate than 120572
1or 1205722has Achieving faster
convergence is because our method considers the randomswitching among the 3 communication situations while [7]rsquosmethod considers only 1 communication situation
5 Conclusion
The distributed average consensus problem in sensor net-works has been studied under a Markovian switching com-munication topology of uncertain transition probabilities
Stochastic Lyapunov functions have been employed to inves-tigate average consensus of linear distributed inference Asufficient condition of average consensus has been proposedbased on feasibility of a set of coupled LMIs The designproblem of fast distributed inference has been solved bynumerical optimization techniques
Acknowledgment
This work was supported by 973 Program of China (Grant2009CB320603)
References
[1] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[2] R Olfati-Saber and R M Murray ldquoConsensus protocols fornetworks of dynamic agentsrdquo in Proceedings of the AmericanControl Conference pp 951ndash956 June 2003
Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
1 2 3 4 51 2 3 4 5
678910 678910
1 2 3 4 5
678910
(1) (2) (3)
Figure 1 Three communication situations
05
04
03
02
01
0
minus01
minus02
0 01 02 03 04 05 06
120572
120588
Figure 2 Graph of 120588(120572)
0 10 20 30 40 50142
144
146
148
15
152
154
156
158
k
State
Figure 3 State curve when 120572opt = 04812
From (2)sim(6) it is seen that 119894 isin Ω119895(119896) if and only if 119895 isin Ω
119894(119896)
and hence
119882(120572 120579119896) = 119882
119879
(120572 120579119896) (12)
Furthermore (10)sim(12) imply that for all 119896 isin Z
1119879119882(120572 120579119896) = 1119879
119882 (120572 120579119896) 1 = 1
(13)
142
144
146
148
15
152
154
156
158
State
0 10 20 30 40 50k
Figure 4 State curve when 1205721= 05528
0 10 20 30 40 50142
144
146
148
15
152
154
156
158
k
State
Figure 5 State curve when 1205722= 05359
Then we have
119882(120572 120579119896) 1199101 = 119910119882(120572 120579
119896) 1 = 1199101 (14)
1
11989911119879119909 (119896 + 1) = 1
11989911119879119882(120572 120579
119896) 119909 (119896) =
1
11989911119879119909 (119896)
(15)
which means that for all 119896 isin Z1
11989911119879119909 (119896) = 1
11989911119879119909 (119896 minus 1) = sdot sdot sdot = 1
11989911119879119909 (0) = 1199101
(16)
4 Mathematical Problems in Engineering
Denote 119890(119896) = 119909(119896) minus 1199101 The iterative distributed inferenceis said to be average consensus in mean square sense iflim119896rarrinfin
119864[119890(119896)2
] = 0 for any initial condition 119909(0) isin R119899
and 1205790isin 119872
Theorem 1 The linear distributed inference (7) reaches aver-age consensus by choice of 120572 if there exist m positive definitematrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎlt 0
(17)
with 119876(120572 ℎ) = 119882(120572 ℎ) minus 111989911119879
Proof Assume 120579119896= ℎ isin 119872 at time step 119896 From (9) (14) and
(16) one has
119890 (119896 + 1) = 119909 (119896 + 1) minus 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896) + 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896)
+1
119899111198791199101
= (119882(120572 ℎ) minus1
11989911119879) (119909 (119896) minus 1199101)
= 119876 (120572 ℎ) 119890 (119896)
(18)
We now consider the stochastic Lyapunov function
119881 (119890 (119896) 120579119896) = 119890119879
(119896) 119875120579119896119890 (119896) (19)
Then for all 120579119896= ℎ isin 119872 we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) minus 119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
(120574ℎ119897+Δ120574ℎ119897) 119875119897119876 (120572 ℎ)minus119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times (
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875119897+ Δ120574ℎℎ119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1119897 = ℎ
Δ120574ℎ119897119875119897minus
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897(119875119897minus 119875ℎ))
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1
4Δ1205742
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1205872
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+119876119879
(120572 ℎ)
119898
sum
119897=1
(119875119897minus 119875ℎ)2
119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
(20)
Denote
Θℎ= 119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎ
(21)
When the conditions inTheorem 1 are satisfied we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
le minus120582min (minusΘℎ) 119890 (119896)2
le minus120578119890 (119896)2
(22)
where 120582min(minusΘℎ) denotes theminimal eigenvalue ofminusΘℎand
120578 = inf 120582min (minusΘℎ) ℎ isin 119872 (23)
Mathematical Problems in Engineering 5
Therefore for all 119890(0) isin R119899 for all 1205790isin 119872 for all 119879 isin Z
119879
sum
119896=0
119864 [119890 (119896)2
] le1
120578
119879
sum
119896=0
(119864 [119881 (119890 (119896) 120579119896)]
minus119864 [119881 (119890 (119896 + 1) 120579119896+1)])
le1
120578(119881 (119890 (0) 120579
0) minus 119864 [119881 (119890 (119879 + 1) 120579
119879+1)])
le1
120578119881 (119890 (0) 120579
0)
(24)
This means lim119896rarrinfin
119864[119890(119896)2
] = 0
32 Optimal Design From the above proof it is seen thatthe conditions in Theorem 1 result in not only lim
119896rarrinfin119864 [
119890(119896)2
] = 0 but also decreasing 119864[119881(119890(119896) 120579119896)] Moreover
lim119896rarrinfin
119864[ 119890(119896)2
] = 0 implies lim119896rarrinfin
119864[119881(119890(119896) 120579119896)] = 0
that is 119864[119881(119890(119896) 120579119896)] also converges to zero Therefore the
decrease rate of 119864[119881(119890(119896) 120579119896)] can express the convergence
speed of distributed inference The following theorem isabout the decrease rate of 119864[119881(119890(119896) 120579
119896)]
Theorem 2 Given 120572 gt 0 and 120588 isin R if there exist m positivedefinite matrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
[[[[[[[
[
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) minus (1 + 120588) 119875
ℎ⋇
(119875ℎminus 1198751) 119876 (120572 ℎ)
minus119868119898119899
(119875ℎminus 119875119898) 119876 (120572 ℎ)
]]]]]]]
]
lt 0 (25)
then in linear distributed inference (7) for any nonzero 119890(119896) isinR119899
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (26)
Proof According to Schur complement [17] condition (25)can be rewritten as
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)2
)119876 (120572 ℎ) minus (1 + 120588) 119875ℎlt 0
(27)
From (27) for any nonzero 119890(119896) isin R119899 one has
119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)
2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
lt 120588119890119879
(119896) 119875ℎ119890 (119896)
(28)
for all 120579119896= ℎ isin 119872 and for all 120579
119896+1= 119897 isin 119872 From (28) (19)
and (20) it is known that119864 [119881 (119890 (119896 + 1) 120579
119896+1| 119890 (119896) 120579
119896)]
minus 119881 (119890 (119896) 120579119896) lt 120588119881 (119890 (119896) 120579
119896)
(29)
and hence
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (30)
Condition (25) in Theorem 2 is a LMI We denote condi-tion (25) as Ξ(120572 120588) lt 0 and for any 120572 gt 0 define
120588 (120572) = inf 120588 | 120588 isin R Ξ (120572 120588) lt 0 has solutions (31)
Using the LMI toolbox of MATLAB 120588(120572) can be computedby Algorithm 1
For a 120572 gt 0with 120588 lt 0 it is known fromTheorems 1 and 2that linear distributed inference (7) is average consensus andthat 120588 is a bound of convergence speed Since a less value of120588 lt 0 gives a faster convergence speed the fast distributedinference problem is addressed as
120583 = inf120572gt0
120588 (120572) (32)
which is an unconstrainted optimization problem of only onevariable Many existing numerical optimizationmethods [18]can be utilized to solve this problem efficiently When 120583 lt 0the optimal parameter
120572opt = arginf120572gt0
120588 (120572) (33)
provides a fast linear distributed inference which reachesaverage consensus
6 Mathematical Problems in Engineering
Choose TOL gt 0Choose enough large 120588
1isin R such that Ξ(120572 120588
1) has solutions
Choose enough small 1205882isin R such that Ξ(120572 120588
2) has no solution
repeat until 1205881minus 1205882lt TOL
1205880larr (1205881+ 1205882)2
Solve Ξ(120572 1205880) lt 0
if Ξ(120572 1205880) lt 0 has solutions
1205881larr 1205880
else1205882larr 1205880
end (repeat)Set 120588(120572) larr 120588
1
Algorithm 1
4 Numerical Example
In this section we present simulation results for averageconsensus of distributed inference in a simple sensor net-work The network has 10 sensor nodes and switched inthree possible communication situations Figure 1 illustrates3 communication situations The estimated transition proba-bilities of 120579
119896is
Γ = [120574ℎ119897] = [
[
07 02 01
045 03 025
05 01 04
]
]
(34)
The estimate error Δ120574ℎ119897satisfies
1003816100381610038161003816Δ120574ℎ1198971003816100381610038161003816 le 2120587ℎ119897 = 01 forallℎ isin 1 2 3 forall119897 isin 1 2 3 (35)
Using the computation procedure in Section 3 the optimiza-tion problem (32) is solved Graph of 120588(120572) is displayed inFigure 2 The result is 120583 = minus02407 lt 0 and 120572opt = 04812For the communication situation in Figure 1(1) we use thedesign method in [7] of minimizing asymptotic convergencefactor and obtain 120572
1= 05528 The design method in [7]
is also applied to the other 2 situations in Figure 1 and get1205722= 1205723= 05359
In order to compare our method with that in [7] theinitial states of each sensor node is selected as
119909 (0) = [11991011199102119910311991041199105119910611991071199108119910911991010]119879
= [152 146 143 156 153 145 157 149 151 148]119879
(36)
Thus from (1) we have 119910 = 15 The real transition probabilitymatrix is set as
Γ = [120574ℎ119897] = [
[
068 024 008
04 027 033
053 011 036
]
]
(37)
Figures 3 4 and 5 show state curves of all sensor nodesunder 120572opt 1205721 and 1205722 respectively It can be seen that allsensor states convergence to 119910 = 15 and that our 120572opt hasfaster convergence rate than 120572
1or 1205722has Achieving faster
convergence is because our method considers the randomswitching among the 3 communication situations while [7]rsquosmethod considers only 1 communication situation
5 Conclusion
The distributed average consensus problem in sensor net-works has been studied under a Markovian switching com-munication topology of uncertain transition probabilities
Stochastic Lyapunov functions have been employed to inves-tigate average consensus of linear distributed inference Asufficient condition of average consensus has been proposedbased on feasibility of a set of coupled LMIs The designproblem of fast distributed inference has been solved bynumerical optimization techniques
Acknowledgment
This work was supported by 973 Program of China (Grant2009CB320603)
References
[1] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[2] R Olfati-Saber and R M Murray ldquoConsensus protocols fornetworks of dynamic agentsrdquo in Proceedings of the AmericanControl Conference pp 951ndash956 June 2003
Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Denote 119890(119896) = 119909(119896) minus 1199101 The iterative distributed inferenceis said to be average consensus in mean square sense iflim119896rarrinfin
119864[119890(119896)2
] = 0 for any initial condition 119909(0) isin R119899
and 1205790isin 119872
Theorem 1 The linear distributed inference (7) reaches aver-age consensus by choice of 120572 if there exist m positive definitematrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎlt 0
(17)
with 119876(120572 ℎ) = 119882(120572 ℎ) minus 111989911119879
Proof Assume 120579119896= ℎ isin 119872 at time step 119896 From (9) (14) and
(16) one has
119890 (119896 + 1) = 119909 (119896 + 1) minus 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896) + 1199101
= 119882(120572 ℎ) 119909 (119896) minus 119882 (120572 ℎ) 1199101 minus 111989911119879119909 (119896)
+1
119899111198791199101
= (119882(120572 ℎ) minus1
11989911119879) (119909 (119896) minus 1199101)
= 119876 (120572 ℎ) 119890 (119896)
(18)
We now consider the stochastic Lyapunov function
119881 (119890 (119896) 120579119896) = 119890119879
(119896) 119875120579119896119890 (119896) (19)
Then for all 120579119896= ℎ isin 119872 we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) minus 119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
(120574ℎ119897+Δ120574ℎ119897) 119875119897119876 (120572 ℎ)minus119875
ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ) + 119876
119879
(120572 ℎ)
times (
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875119897+ Δ120574ℎℎ119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1119897 = ℎ
Δ120574ℎ119897119875119897minus
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897119875ℎ)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
= 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)(
119898
sum
119897=1 119897 = ℎ
Δ120574ℎ119897(119875119897minus 119875ℎ))
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1
4Δ1205742
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)
119898
sum
119897=1
120574ℎ119897119875119897119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1 119897 = ℎ
(1205872
ℎ119897119868119899+ (119875119897minus 119875ℎ)2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
le 119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+119876119879
(120572 ℎ)
119898
sum
119897=1
(119875119897minus 119875ℎ)2
119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
(20)
Denote
Θℎ= 119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ)
+ 119876119879
(120572 ℎ)
119898
sum
119897=1
(119875ℎminus 119875119897)2
119876 (120572 ℎ) minus 119875ℎ
(21)
When the conditions inTheorem 1 are satisfied we have
119864 [119881 (119890 (119896 + 1) 120579119896+1| 119890 (119896) 120579
119896)] minus 119881 (119890 (119896) 120579
119896)
le minus120582min (minusΘℎ) 119890 (119896)2
le minus120578119890 (119896)2
(22)
where 120582min(minusΘℎ) denotes theminimal eigenvalue ofminusΘℎand
120578 = inf 120582min (minusΘℎ) ℎ isin 119872 (23)
Mathematical Problems in Engineering 5
Therefore for all 119890(0) isin R119899 for all 1205790isin 119872 for all 119879 isin Z
119879
sum
119896=0
119864 [119890 (119896)2
] le1
120578
119879
sum
119896=0
(119864 [119881 (119890 (119896) 120579119896)]
minus119864 [119881 (119890 (119896 + 1) 120579119896+1)])
le1
120578(119881 (119890 (0) 120579
0) minus 119864 [119881 (119890 (119879 + 1) 120579
119879+1)])
le1
120578119881 (119890 (0) 120579
0)
(24)
This means lim119896rarrinfin
119864[119890(119896)2
] = 0
32 Optimal Design From the above proof it is seen thatthe conditions in Theorem 1 result in not only lim
119896rarrinfin119864 [
119890(119896)2
] = 0 but also decreasing 119864[119881(119890(119896) 120579119896)] Moreover
lim119896rarrinfin
119864[ 119890(119896)2
] = 0 implies lim119896rarrinfin
119864[119881(119890(119896) 120579119896)] = 0
that is 119864[119881(119890(119896) 120579119896)] also converges to zero Therefore the
decrease rate of 119864[119881(119890(119896) 120579119896)] can express the convergence
speed of distributed inference The following theorem isabout the decrease rate of 119864[119881(119890(119896) 120579
119896)]
Theorem 2 Given 120572 gt 0 and 120588 isin R if there exist m positivedefinite matrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
[[[[[[[
[
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) minus (1 + 120588) 119875
ℎ⋇
(119875ℎminus 1198751) 119876 (120572 ℎ)
minus119868119898119899
(119875ℎminus 119875119898) 119876 (120572 ℎ)
]]]]]]]
]
lt 0 (25)
then in linear distributed inference (7) for any nonzero 119890(119896) isinR119899
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (26)
Proof According to Schur complement [17] condition (25)can be rewritten as
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)2
)119876 (120572 ℎ) minus (1 + 120588) 119875ℎlt 0
(27)
From (27) for any nonzero 119890(119896) isin R119899 one has
119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)
2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
lt 120588119890119879
(119896) 119875ℎ119890 (119896)
(28)
for all 120579119896= ℎ isin 119872 and for all 120579
119896+1= 119897 isin 119872 From (28) (19)
and (20) it is known that119864 [119881 (119890 (119896 + 1) 120579
119896+1| 119890 (119896) 120579
119896)]
minus 119881 (119890 (119896) 120579119896) lt 120588119881 (119890 (119896) 120579
119896)
(29)
and hence
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (30)
Condition (25) in Theorem 2 is a LMI We denote condi-tion (25) as Ξ(120572 120588) lt 0 and for any 120572 gt 0 define
120588 (120572) = inf 120588 | 120588 isin R Ξ (120572 120588) lt 0 has solutions (31)
Using the LMI toolbox of MATLAB 120588(120572) can be computedby Algorithm 1
For a 120572 gt 0with 120588 lt 0 it is known fromTheorems 1 and 2that linear distributed inference (7) is average consensus andthat 120588 is a bound of convergence speed Since a less value of120588 lt 0 gives a faster convergence speed the fast distributedinference problem is addressed as
120583 = inf120572gt0
120588 (120572) (32)
which is an unconstrainted optimization problem of only onevariable Many existing numerical optimizationmethods [18]can be utilized to solve this problem efficiently When 120583 lt 0the optimal parameter
120572opt = arginf120572gt0
120588 (120572) (33)
provides a fast linear distributed inference which reachesaverage consensus
6 Mathematical Problems in Engineering
Choose TOL gt 0Choose enough large 120588
1isin R such that Ξ(120572 120588
1) has solutions
Choose enough small 1205882isin R such that Ξ(120572 120588
2) has no solution
repeat until 1205881minus 1205882lt TOL
1205880larr (1205881+ 1205882)2
Solve Ξ(120572 1205880) lt 0
if Ξ(120572 1205880) lt 0 has solutions
1205881larr 1205880
else1205882larr 1205880
end (repeat)Set 120588(120572) larr 120588
1
Algorithm 1
4 Numerical Example
In this section we present simulation results for averageconsensus of distributed inference in a simple sensor net-work The network has 10 sensor nodes and switched inthree possible communication situations Figure 1 illustrates3 communication situations The estimated transition proba-bilities of 120579
119896is
Γ = [120574ℎ119897] = [
[
07 02 01
045 03 025
05 01 04
]
]
(34)
The estimate error Δ120574ℎ119897satisfies
1003816100381610038161003816Δ120574ℎ1198971003816100381610038161003816 le 2120587ℎ119897 = 01 forallℎ isin 1 2 3 forall119897 isin 1 2 3 (35)
Using the computation procedure in Section 3 the optimiza-tion problem (32) is solved Graph of 120588(120572) is displayed inFigure 2 The result is 120583 = minus02407 lt 0 and 120572opt = 04812For the communication situation in Figure 1(1) we use thedesign method in [7] of minimizing asymptotic convergencefactor and obtain 120572
1= 05528 The design method in [7]
is also applied to the other 2 situations in Figure 1 and get1205722= 1205723= 05359
In order to compare our method with that in [7] theinitial states of each sensor node is selected as
119909 (0) = [11991011199102119910311991041199105119910611991071199108119910911991010]119879
= [152 146 143 156 153 145 157 149 151 148]119879
(36)
Thus from (1) we have 119910 = 15 The real transition probabilitymatrix is set as
Γ = [120574ℎ119897] = [
[
068 024 008
04 027 033
053 011 036
]
]
(37)
Figures 3 4 and 5 show state curves of all sensor nodesunder 120572opt 1205721 and 1205722 respectively It can be seen that allsensor states convergence to 119910 = 15 and that our 120572opt hasfaster convergence rate than 120572
1or 1205722has Achieving faster
convergence is because our method considers the randomswitching among the 3 communication situations while [7]rsquosmethod considers only 1 communication situation
5 Conclusion
The distributed average consensus problem in sensor net-works has been studied under a Markovian switching com-munication topology of uncertain transition probabilities
Stochastic Lyapunov functions have been employed to inves-tigate average consensus of linear distributed inference Asufficient condition of average consensus has been proposedbased on feasibility of a set of coupled LMIs The designproblem of fast distributed inference has been solved bynumerical optimization techniques
Acknowledgment
This work was supported by 973 Program of China (Grant2009CB320603)
References
[1] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[2] R Olfati-Saber and R M Murray ldquoConsensus protocols fornetworks of dynamic agentsrdquo in Proceedings of the AmericanControl Conference pp 951ndash956 June 2003
Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Therefore for all 119890(0) isin R119899 for all 1205790isin 119872 for all 119879 isin Z
119879
sum
119896=0
119864 [119890 (119896)2
] le1
120578
119879
sum
119896=0
(119864 [119881 (119890 (119896) 120579119896)]
minus119864 [119881 (119890 (119896 + 1) 120579119896+1)])
le1
120578(119881 (119890 (0) 120579
0) minus 119864 [119881 (119890 (119879 + 1) 120579
119879+1)])
le1
120578119881 (119890 (0) 120579
0)
(24)
This means lim119896rarrinfin
119864[119890(119896)2
] = 0
32 Optimal Design From the above proof it is seen thatthe conditions in Theorem 1 result in not only lim
119896rarrinfin119864 [
119890(119896)2
] = 0 but also decreasing 119864[119881(119890(119896) 120579119896)] Moreover
lim119896rarrinfin
119864[ 119890(119896)2
] = 0 implies lim119896rarrinfin
119864[119881(119890(119896) 120579119896)] = 0
that is 119864[119881(119890(119896) 120579119896)] also converges to zero Therefore the
decrease rate of 119864[119881(119890(119896) 120579119896)] can express the convergence
speed of distributed inference The following theorem isabout the decrease rate of 119864[119881(119890(119896) 120579
119896)]
Theorem 2 Given 120572 gt 0 and 120588 isin R if there exist m positivedefinite matrices 119875
1 1198752 119875
119898isin R119899times119899 such that for all ℎ isin 119872
[[[[[[[
[
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1 119897 = ℎ
1205872
ℎ119897119868119899)119876 (120572 ℎ) minus (1 + 120588) 119875
ℎ⋇
(119875ℎminus 1198751) 119876 (120572 ℎ)
minus119868119898119899
(119875ℎminus 119875119898) 119876 (120572 ℎ)
]]]]]]]
]
lt 0 (25)
then in linear distributed inference (7) for any nonzero 119890(119896) isinR119899
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (26)
Proof According to Schur complement [17] condition (25)can be rewritten as
119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)2
)119876 (120572 ℎ) minus (1 + 120588) 119875ℎlt 0
(27)
From (27) for any nonzero 119890(119896) isin R119899 one has
119890119879
(119896)(119876119879
(120572 ℎ)(
119898
sum
119897=1
120574ℎ119897119875119897+
119898
sum
119897=1119897 = ℎ
1205872
ℎ119897119868119899
+
119898
sum
119897=1
(119875ℎminus 119875119897)
2
)
times119876 (120572 ℎ) minus 119875ℎ)119890 (119896)
lt 120588119890119879
(119896) 119875ℎ119890 (119896)
(28)
for all 120579119896= ℎ isin 119872 and for all 120579
119896+1= 119897 isin 119872 From (28) (19)
and (20) it is known that119864 [119881 (119890 (119896 + 1) 120579
119896+1| 119890 (119896) 120579
119896)]
minus 119881 (119890 (119896) 120579119896) lt 120588119881 (119890 (119896) 120579
119896)
(29)
and hence
119864 [119881 (119890 (119896 + 1) 120579119896+1)] minus 119864 [119881 (119890 (119896) 120579
119896)]
119864 [119881 (119890 (119896) 120579119896)]
lt 120588 (30)
Condition (25) in Theorem 2 is a LMI We denote condi-tion (25) as Ξ(120572 120588) lt 0 and for any 120572 gt 0 define
120588 (120572) = inf 120588 | 120588 isin R Ξ (120572 120588) lt 0 has solutions (31)
Using the LMI toolbox of MATLAB 120588(120572) can be computedby Algorithm 1
For a 120572 gt 0with 120588 lt 0 it is known fromTheorems 1 and 2that linear distributed inference (7) is average consensus andthat 120588 is a bound of convergence speed Since a less value of120588 lt 0 gives a faster convergence speed the fast distributedinference problem is addressed as
120583 = inf120572gt0
120588 (120572) (32)
which is an unconstrainted optimization problem of only onevariable Many existing numerical optimizationmethods [18]can be utilized to solve this problem efficiently When 120583 lt 0the optimal parameter
120572opt = arginf120572gt0
120588 (120572) (33)
provides a fast linear distributed inference which reachesaverage consensus
6 Mathematical Problems in Engineering
Choose TOL gt 0Choose enough large 120588
1isin R such that Ξ(120572 120588
1) has solutions
Choose enough small 1205882isin R such that Ξ(120572 120588
2) has no solution
repeat until 1205881minus 1205882lt TOL
1205880larr (1205881+ 1205882)2
Solve Ξ(120572 1205880) lt 0
if Ξ(120572 1205880) lt 0 has solutions
1205881larr 1205880
else1205882larr 1205880
end (repeat)Set 120588(120572) larr 120588
1
Algorithm 1
4 Numerical Example
In this section we present simulation results for averageconsensus of distributed inference in a simple sensor net-work The network has 10 sensor nodes and switched inthree possible communication situations Figure 1 illustrates3 communication situations The estimated transition proba-bilities of 120579
119896is
Γ = [120574ℎ119897] = [
[
07 02 01
045 03 025
05 01 04
]
]
(34)
The estimate error Δ120574ℎ119897satisfies
1003816100381610038161003816Δ120574ℎ1198971003816100381610038161003816 le 2120587ℎ119897 = 01 forallℎ isin 1 2 3 forall119897 isin 1 2 3 (35)
Using the computation procedure in Section 3 the optimiza-tion problem (32) is solved Graph of 120588(120572) is displayed inFigure 2 The result is 120583 = minus02407 lt 0 and 120572opt = 04812For the communication situation in Figure 1(1) we use thedesign method in [7] of minimizing asymptotic convergencefactor and obtain 120572
1= 05528 The design method in [7]
is also applied to the other 2 situations in Figure 1 and get1205722= 1205723= 05359
In order to compare our method with that in [7] theinitial states of each sensor node is selected as
119909 (0) = [11991011199102119910311991041199105119910611991071199108119910911991010]119879
= [152 146 143 156 153 145 157 149 151 148]119879
(36)
Thus from (1) we have 119910 = 15 The real transition probabilitymatrix is set as
Γ = [120574ℎ119897] = [
[
068 024 008
04 027 033
053 011 036
]
]
(37)
Figures 3 4 and 5 show state curves of all sensor nodesunder 120572opt 1205721 and 1205722 respectively It can be seen that allsensor states convergence to 119910 = 15 and that our 120572opt hasfaster convergence rate than 120572
1or 1205722has Achieving faster
convergence is because our method considers the randomswitching among the 3 communication situations while [7]rsquosmethod considers only 1 communication situation
5 Conclusion
The distributed average consensus problem in sensor net-works has been studied under a Markovian switching com-munication topology of uncertain transition probabilities
Stochastic Lyapunov functions have been employed to inves-tigate average consensus of linear distributed inference Asufficient condition of average consensus has been proposedbased on feasibility of a set of coupled LMIs The designproblem of fast distributed inference has been solved bynumerical optimization techniques
Acknowledgment
This work was supported by 973 Program of China (Grant2009CB320603)
References
[1] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[2] R Olfati-Saber and R M Murray ldquoConsensus protocols fornetworks of dynamic agentsrdquo in Proceedings of the AmericanControl Conference pp 951ndash956 June 2003
Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Choose TOL gt 0Choose enough large 120588
1isin R such that Ξ(120572 120588
1) has solutions
Choose enough small 1205882isin R such that Ξ(120572 120588
2) has no solution
repeat until 1205881minus 1205882lt TOL
1205880larr (1205881+ 1205882)2
Solve Ξ(120572 1205880) lt 0
if Ξ(120572 1205880) lt 0 has solutions
1205881larr 1205880
else1205882larr 1205880
end (repeat)Set 120588(120572) larr 120588
1
Algorithm 1
4 Numerical Example
In this section we present simulation results for averageconsensus of distributed inference in a simple sensor net-work The network has 10 sensor nodes and switched inthree possible communication situations Figure 1 illustrates3 communication situations The estimated transition proba-bilities of 120579
119896is
Γ = [120574ℎ119897] = [
[
07 02 01
045 03 025
05 01 04
]
]
(34)
The estimate error Δ120574ℎ119897satisfies
1003816100381610038161003816Δ120574ℎ1198971003816100381610038161003816 le 2120587ℎ119897 = 01 forallℎ isin 1 2 3 forall119897 isin 1 2 3 (35)
Using the computation procedure in Section 3 the optimiza-tion problem (32) is solved Graph of 120588(120572) is displayed inFigure 2 The result is 120583 = minus02407 lt 0 and 120572opt = 04812For the communication situation in Figure 1(1) we use thedesign method in [7] of minimizing asymptotic convergencefactor and obtain 120572
1= 05528 The design method in [7]
is also applied to the other 2 situations in Figure 1 and get1205722= 1205723= 05359
In order to compare our method with that in [7] theinitial states of each sensor node is selected as
119909 (0) = [11991011199102119910311991041199105119910611991071199108119910911991010]119879
= [152 146 143 156 153 145 157 149 151 148]119879
(36)
Thus from (1) we have 119910 = 15 The real transition probabilitymatrix is set as
Γ = [120574ℎ119897] = [
[
068 024 008
04 027 033
053 011 036
]
]
(37)
Figures 3 4 and 5 show state curves of all sensor nodesunder 120572opt 1205721 and 1205722 respectively It can be seen that allsensor states convergence to 119910 = 15 and that our 120572opt hasfaster convergence rate than 120572
1or 1205722has Achieving faster
convergence is because our method considers the randomswitching among the 3 communication situations while [7]rsquosmethod considers only 1 communication situation
5 Conclusion
The distributed average consensus problem in sensor net-works has been studied under a Markovian switching com-munication topology of uncertain transition probabilities
Stochastic Lyapunov functions have been employed to inves-tigate average consensus of linear distributed inference Asufficient condition of average consensus has been proposedbased on feasibility of a set of coupled LMIs The designproblem of fast distributed inference has been solved bynumerical optimization techniques
Acknowledgment
This work was supported by 973 Program of China (Grant2009CB320603)
References
[1] R Olfati-Saber and R M Murray ldquoConsensus problems innetworks of agents with switching topology and time-delaysrdquoIEEE Transactions onAutomatic Control vol 49 no 9 pp 1520ndash1533 2004
[2] R Olfati-Saber and R M Murray ldquoConsensus protocols fornetworks of dynamic agentsrdquo in Proceedings of the AmericanControl Conference pp 951ndash956 June 2003
Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
[3] L Moreau ldquoStability of multiagent systems with time-depend-ent communication linksrdquo IEEE Transactions on AutomaticControl vol 50 no 2 pp 169ndash182 2005
[4] A Jadbabaie J Lin andA SMorse ldquoCoordination of groups ofmobile autonomous agents using nearest neighbor rulesrdquo IEEETransactions on Automatic Control vol 48 no 6 pp 988ndash10012003
[5] W Ren and R W Beard ldquoConsensus seeking in multiagentsystems under dynamically changing interaction topologiesrdquoIEEE Transactions on Automatic Control vol 50 no 5 pp 655ndash661 2005
[6] YHatano andMMesbahi ldquoAgreement over randomnetworksrdquoIEEE Transactions on Automatic Control vol 50 no 11 pp1867ndash1872 2005
[7] L Xiao and S Boyd ldquoFast linear iterations for distributedaveragingrdquo Systems amp Control Letters vol 53 no 1 pp 65ndash782004
[8] S Kar and J M F Moura ldquoSensor networks with random linkstopology design for distributed consensusrdquo IEEE Transactionson Signal Processing vol 56 no 7 part 2 pp 3315ndash3326 2008
[9] Y Ji H J Chizeck X Feng and K A Loparo ldquoStability andcontrol of discrete-time jump linear systemsrdquo Control Theoryand Advanced Technology vol 7 no 2 pp 247ndash270 1991
[10] O L V Costa and M D Fragoso ldquoStability results for discrete-time linear systems with Markovian jumping parametersrdquoJournal of Mathematical Analysis and Applications vol 179 no1 pp 154ndash178 1993
[11] J Xiong J Lam H Gao and D W C Ho ldquoOn robust stabi-lization of Markovian jump systems with uncertain switchingprobabilitiesrdquo Automatica vol 41 no 5 pp 897ndash903 2005
[12] L Zhang and E-K Boukas ldquo119867infin
control for discrete-timeMarkovian jump linear systems with partly unknown transitionprobabilitiesrdquo International Journal of Robust and NonlinearControl vol 19 no 8 pp 868ndash883 2009
[13] P Seiler and R Sengupta ldquoAn 119867infin
approach to networkedcontrolrdquo IEEE Transactions on Automatic Control vol 50 no3 pp 356ndash364 2005
[14] L A Montestruque and P Antsaklis ldquoStability of model-basednetworked control systems with time-varying transmissiontimesrdquo IEEE Transactions on Automatic Control vol 49 no 9pp 1562ndash1572 2004
[15] J Yu L Wang and M Yu ldquoSwitched system approach to sta-bilization of networked control systemsrdquo International Journalof Robust and Nonlinear Control vol 21 no 17 pp 1925ndash19462011
[16] Y Xia G-P Liu M Fu and D Rees ldquoPredictive control ofnetworked systems with random delay and data dropoutrdquo IETControl Theory and Applications vol 3 no 11 pp 1476ndash14862009
[17] S Boyd L El Ghaoui E Feron and V Balakrishnan LinearMatrix Inequalities in SystemandControlTheory vol 15 of SIAMStudies in Applied Mathematics SIAM Philadelphia Pa USA1994
[18] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of