
Design and Implementation of Attitude-control Flywheel Controller Based on RTOS

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013, Article ID 587098, 9 pageshttp://dx.doi.org/10.1155/2013/587098
Research ArticleAttitude and Altitude Controller Design forQuad-Rotor Type MAVs
Wei Wang, Hao Ma, Min Xia, Liguo Weng, and Xuefei Ye
School of Information and Control, Nanjing University of Information Science & Technology, No. 219 Ningliu Road,Nanjing 210044, Jiangsu, China
Correspondence should be addressed to Wei Wang; [email protected]
Received 23 December 2012; Revised 24 March 2013; Accepted 25 March 2013
Academic Editor: Engang Tian
Copyright © 2013 Wei Wang et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Micro air vehicles (MAVs) have a wide application such as the military reconnaissance, meteorological survey, environmentalmonitoring, and other aspects. In this paper, attitude and altitude control for Quad-Rotor type MAVs is discussed and analyzed.For the attitude control, a newmethod by using three gyroscopes and one triaxial accelerometer is proposed to estimate the attitudeangle information. Then with the approximate linear model obtained by system identification, Model Reference Sliding ModeControl (MRSMC) technique is applied to enhance the robustness. In consideration of the relatively constant altitude model, aLinear Quadratic Gaussian (LQG) controller is adopted. The outdoor experimental results demonstrate the superior stability androbustness of the controllers.
1. Introduction
Recently, a new class of flight vehicles calledmicro air vehicles(MAVs) which have a great potential for military, industrialas well as civilian applications, has been gaining tremendousattention.
Since 1990s, with the development of the Micro Elec-tro Mechanical Systems (MEMS) technology, the singlerotor helicopter has been the favorable platform for MAVsresearch. However, the limitations such as complexity, insta-bility, and payload limitation slowed the trend down. Mean-while, the multirotor vehicle especially the Quad-Rotor typeMAVs become more attractive. The Quad-Rotor, comparedwith single rotor helicopter and dual-rotor vehicle, hasexcellent capabilities of superior payload, low cost, andsimple construction. As a result, it can be widely used inmilitary reconnaissance,meteorological survey, environmen-tal monitoring, delivering light goods in emergency, andother aspects [1]. Normally, the Quad-Rotor needs to flyautonomously to accomplish such difficult missions. How-ever, there are many technical problems caused by theirsmall size and structure, especially the installment failure ofthe communication apparatus and sensors. Until now, greatachievements have been made in solving these difficulties
by research groups and institutions, such as MIT, AscendingTechnology, Microdrones, Draganfly, Heudiasyc University,PennsylvaniaUniversity, andChibaUniversity [2–6]. Varioustypes of control techniques have been attempted such asback stepping (BS) control, nonlinear control, and robustcontrol [7]. Recently, the autonomous flight control of Quad-Rotor is driven to a maturity stage and the attention of MAVresearch is transferred to vision-based stunt flight, indoorobstacle avoidance, SLAM-based control, or the developmentof novel structure MAVs [8–11]. However, the stability of theattitude controller in jamming environment becomes a mainlimitation with these deeper research continues.
In this paper, system dynamics for attitude and altitudecontrol as well as the control algorithms of a typically Quad-Rotor type MAV are discussed. With the historical flight dataof the vehicle obtained by experiments, the mathematicalmodel is determined by system identification tools inMatlab.For the attitude control, instead of using the IMU unit orthe extended Kalman filter (EKF), we select three gyroscopesand a triaxial accelerometer to estimate the attitude angleby Kalman flitre. The main advantages of this method arethe low price and less computation which will promote theindustrialization process. In consideration of the parameteruncertainties, model errors, and other interference, we apply

2 Mathematical Problems in Engineering
Table 1: Specification of Quad-Rotor type MAV.
Parameter Value UnitMaximum Diameter 500 mmHeight 250 mmTotal mass 1.1 kgMaximum lift 1 kg
Figure 1: Quad-Rotor type MAV.
the MRSMC to pursue good robustness. As to altitudecontrol, we propose to use barometer and accelerometerinstead of thewidely usedGPS to improve the precision.Thena model-based controller by optimal control methodology isdesigned.
2. Controlled Object
Our research platform is a 4-channel radio controlled Quad-Rotor type MAV designed by our research group.The vehicleairframe is constructed by carbonfiberwhich can provide sig-nificant stiffness and rigidity while keeping the weight down.The lift results from four AKE brushless motors. In orderto drive these brushless motors, Pentium-18A Ultra-PWMbrushless controllers which support 50Hz–500Hz PWMsignal communication are selected. By using the brushlesscontrollers, the maximum rotational speed can reach about8000 rpm and acquire about 1 Kg payload with four APC1245propellers. The flight time is about 20 minutes with a three-cell-2100mAh LiPo battery without payload. Figure 1 showsan overview of our platform and the specification is shown inTable 1.
The embedded control system consists of three gyro-scopes, one triaxial accelerometer, one barometer, one 12 bitADC chip MCP3204, and one Arm7 micro controller. Thegyroscope ADXRS610 and triaxial accelerometer ADXL335from Analog Devices Corporation are used to stabilize theattitude of the vehicle. The MPX5100Ap barometer togetherwith the accelerometer is used for altitude control.
The running process of the embedded control systemis as follows. Firstly, the Arm7 receives digital sensor datafrom ADC chip and control instruction from a 72MHz PPMreceiver. Then run the control program to draw a controloutput for each axis, respectively. At last, the summarizedrotational control instructions are sent to themotor drivers to
complete the specified movement. All the processing is doneat a frequency of 400Hz. The configuration of the overallsystem can be seen in Figure 2. In order to monitor thevehicle state and record the flight data, a wireless modemXBee-pro whose communication range can reach 1.6 Kmwith its maximum power of 63mW is used to accomplish thecommunication between the MAV and the ground station.
3. Attitude Modeling and Controller Design
For the𝑋 and𝑌 directions, the autonomous flight control canbe divided into three loops of attitude (Roll, Pitch), velocity,and position. This chapter mainly illustrates the attitudemodeling and controller design which is the foundation ofthe study. In order to achieve attitude control, the attitudedynamics must be reviewed at first. Therefore, the relevanttheoretical derivation and system identification are appliedto acquire the mathematic model. In view of the necessity ofrobustness, a novel sliding mode controller combined withthe model following control theory is proposed.
3.1. Attitude Modeling. The tuning of rotational speed ofevery rotor leads to one degree of freedom of the MAV;coupledmotion and nonlinearity are very obvious.Therefore,it is quite difficult to analyze such system. In this research, weneglect the coupled motion and gain an approximate linearattitude model. Plus, the Roll attitude model is the same asPitch owing to the symmetry structure, and the modeling isconducted aiming at roll angle only.
As an assumption, no coupling exists and the variationrange of attitude angle is small. The following relationshipbetween the torque around the center and the obtained rollangle can be described as [12, 13]
𝜏 = 𝐽 𝜙, (1)
where 𝜏 is a torque vector, 𝐽 is a moment of inertia, and 𝜙 isthe Euler angle of attitude. Assuming that the transfer func-tion between the instruction value and the torque actuallyobtained is the first-order inertial system. Then the transferfunction is given
𝐺𝑢𝜙(𝑠) =
𝜙 (𝑠)
𝑢 (𝑠)=
𝑘
𝐽 (1 + 𝑇𝑠) 𝑠2. (2)
Here, 𝑢 represents the control input; 𝑘 and 𝑇 are theparameters of the inertial system.
In general, the angular is estimated by the IMU sensor. Inthis research, we propose one accelerometer and three gyro-scopes to estimate the angle. In particular, the accelerometermeasures not only dynamic acceleration but also gravity. Therelationship can be represented as
𝑎𝑚= 𝑔𝜙 + 𝑎
𝑑, (3)
where 𝑔 is the acceleration of gravity, 𝑎𝑚is the measured
acceleration, and 𝑎𝑑is the dynamic acceleration.
Considering that the air resistance exits and the coef-ficient is 𝐾, the mass of the plant is 𝑚. Then the force

Mathematical Problems in Engineering 3
PPM RS-232
A/D
A/DA/D
Wireless modemX-Bee
Embedded control system
3 gyros
PWM
Brushlessmotor controller
Brushlessmotor controller
Brushlessmotor controller
Brushlessmotor controller
M4 M3 M2 M1
AT91
SAM7S
64 3 axisaccelerarion
6Ch 72MHzreceiver
Barometer
Figure 2: Configuration of 4 rotors type MAV system.
equilibrium equation of the vehicle is written as the followingform:
𝑚𝑎𝑑= 𝑚𝑔𝜙 − 𝐾∫𝑎
𝑑𝑑𝑡. (4)
Thereby, the transfer function from the attitude angle to thedynamic acceleration is derived as
𝑎𝑑(𝑠) =
(𝑚𝑔/𝐾) 𝑠
(𝑚/𝐾) 𝑠 + 1𝜙 (𝑠) . (5)
The following block diagram in Figure 3 gives a more conciseexpression of the previous equations.
Consequently, the complete dynamic state model whichgoverns the MAVs is formed by selecting angular accelera-tion, angular velocity, angle, dynamic acceleration as the statevariables and angular velocity, measured acceleration as theoutput
[[[
[
��1
��2
��3
��4
]]]
]
=
[[[[[[
[
−1
𝑇0 0 0
1 0 0 0
0 1 0 0
0 𝑔 0 −𝐾
𝑚
]]]]]]
]
[[[
[
𝑥1
𝑥2
𝑥3
𝑥4
]]]
]
+
[[[[
[
𝑘
𝐽𝑇
0
0
0
]]]]
]
𝑢,
[𝑦1
𝑦2
] = [0 1 0 0
0 0 𝑔 −1] .
(6)
The unknown parameters mentioned previously are deter-mined by the system identification tool in Matlab with thehistorical flight data supplied. To verify the model accuracy,a comparison of the real plant model and the simulated
Angularvelocity
𝑔 Acc
1
𝑠Roll
𝑚𝑔𝑠/𝐾
/𝐾 + 1
+
+
𝑚s𝑎
𝑎
𝑑
Figure 3: Block diagram of the transfer function.
model output for the same control instruction is conductedin Figure 4.The similar shape of the curves indicates the highaccuracy of the identified model.
3.2.MRSMCControllerDesign. Considering the nonlinearityand the strong coupling of the real Quad-Rotor model, itis of great importance to design the controller with goodrobustness in both stability and performance. Hence, theMRSMC technique is adopted to enhance the robustness.
The basic idea of MRSMC is to minimize the trackingerror of state variables between the vehicle and the referencemodel in sliding mode. The block diagram of MRSMC isshown in Figure 5. Slidingmode control (SMC) is well knownfor its reliable performance which can be proven by its widerange of application. In this paper, the MRC structure isintroduced to provide the reference variables so that theservo problem and the regulator problem are separated.Thereby, the task of the feedback controller is just to drivethe error between the output of the process and the outputof the reference model to zero. In view of the antidisturbanceperformance, the sliding mode control (SMC) is selected asthe feedback controller [14].

4 Mathematical Problems in Engineering
0 2 4 6 8 10 12 14 16 18 20
0
1
2
Time (s)
Simulated modelMeasured output
−2
−1
Ang
ular
vel
ocity
(rad
/s)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
0.5
1
Time (s)
−0.5
−1
Simulated modelMeasured output
Acc.
(m/s2)
(b)
Figure 4: Cross-validation result of angular velocity and acceleration output.
Figure 5: Block diagram of MRSMC.
3.2.1. Design of the ReferenceModel. To generate the referencesignals, a specified reference model whose states variablescorrespond directly to the identified model is built
��𝑚= 𝐴𝑚𝑥𝑚+ 𝐵𝑚𝑟,
𝑦𝑚= 𝐶𝑚𝑥𝑚.
(7)
Here 𝑟 is the reference input. By setting 𝐶𝑚= 𝐶, 𝑒 = 𝑥 − 𝑥
𝑚,
the error dynamics of the state variables can be computed bysubtracting (7) from the plant model
𝑒 = 𝐴𝑚𝑒 + (𝐴 − 𝐴
𝑚) 𝑥 + 𝐵𝑢 − 𝐵
𝑚𝑟. (8)
Making the system satisfies the following conditions:
𝐴𝑚− 𝐴 = 𝐵𝐾
1, 𝐵
𝑚= 𝐵𝐾2. (9)
Then
𝑒 = 𝐴𝑚𝑒 − 𝐵 (𝐾
1𝑥 + 𝐾
2𝑟 − 𝑢) . (10)
To ensure the output 𝑦𝑚
tracks 𝑟, the DC gain must beadjusted to 1. When the time variable tends to infinity, thefollowing equation is obtained:
𝐴𝑚𝑥𝑚+ 𝐵𝑚𝑟 = 0. (11)
The output 𝑦𝑚can be given as
𝑦𝑚= −𝐶𝑚𝐴−1
𝑚𝐵𝑚𝑟 = −𝐶
𝑚𝐴−1
𝑚𝐵𝐾2𝑟. (12)
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
Time (s)
Ang
ular
(rad
)
Reference inputReference model output
Figure 6: Step response of the reference model.
So 𝐾2= (−𝐶
𝑚𝐴−1
𝑚𝐵)−1 and 𝐵
𝑚can be computed by
𝐵𝑚= 𝐵𝐾2= 𝐵(−𝐶
𝑚𝐴−1
𝑚𝐵)−1
. (13)
𝐴𝑚is determined by adjusting in Matlab simulation
𝐴𝑚=
[[[[
[
−𝑎1−𝑎2−𝑎3
0
1 0 0 0
0 1 0 0
0 𝑔 0 −0.55
]]]]
]
. (14)
In this work, the parameters are chosen as 𝑎1= 18, 𝑎
2=
160 and 𝑎3= 600. Figure 6 shows the step response of the
reference model. The model output can track the referencewell in about 1 second with little overshoot, so the desiredperformance of the reference model is obtained.
3.2.2. Design of the SMCControl Loop. Todesign the feedbackcontroller, the sliding mode control technique is proposed

Mathematical Problems in Engineering 5
0 2 4 6 8
0
100C
ontro
l inp
ut
−300
−200
−100
Time (s)
(a)
0 2 4 6 8
0
20
40
Stat
e var
iabl
es
−20
Time (s)
(b)
0 2 4 6 8
0
10
Switc
hing
func
tion
−30
−20
−10
Time (s)
(c)
0 2 4 6 80
0.5
1
1.5
Ang
ular
(rad
/s)
Time (s)
(d)
Figure 7: Simulation result of MRSMC.
because of its high robustness to exogenous disturbances andparametric uncertainties.
Considering that the control goal is to make the realplant output angle to track the angle of the reference model.Thus, a novel state 𝜀
𝑦is introduced to enhance the tracking
performance
𝜀𝑦= 𝑦 − 𝑦
𝑚. (15)
And the expansion system can be given as
𝑒𝑠= [
𝑒
𝜀𝑦
] = [𝐴𝑚
0
𝐶𝑚
0] [
𝑒
𝜀𝑦
] + [𝐵
0] 𝑢𝑠= 𝐴𝑠𝑒𝑠+ 𝐵𝑠𝑢𝑠
(16)
with 𝑢𝑠= −(𝐾
1𝑥 + 𝐾
2𝑟 − 𝑢).
The switching function 𝜎 ∈ 𝑅 is selected as
𝜎 = 𝑆𝑒𝑠,
�� = 𝑆𝐴𝑠𝑒𝑠− 𝑆𝐵𝑠(𝐾1𝑥 + 𝐾
2𝑟 − 𝑢) .
(17)
When the state variables are subject to the sliding surface, 𝜎 =
�� = 0, the equivalent input is derived
𝑢eq = −(𝑆𝐵𝑠)−1
𝑆𝐴𝑠𝑒𝑠+ 𝐾1𝑥 + 𝐾
2𝑟. (18)
Substituting 𝑢eq into (16) as the control input, (19) is obtained:
𝑒𝑠= {𝐼 − 𝐵
𝑠(𝑆𝐵𝑠)−1
𝑆}𝐴𝑠𝑒𝑠. (19)
The previous system described by (19) gains stability bystabilizing zeros.Then the optimal feedback gain 𝐹 is selectedas hyper plane 𝑆 to stabilize it
𝐹 = 𝑆 = 𝐵𝑇
𝑠𝑃, (20)
where 𝑃 is the solution of the following Riccati equation and𝑆 satisfied the condition of 𝑆𝐵
𝑠> 0:
𝑃𝐴𝑠+ 𝐴𝑇
𝑠𝑃 − 𝑃𝐵
𝑠𝐵𝑇
𝑠𝑃 + 𝑄 = 0. (21)
The nonlinear term of SMC is selected as
𝑢nl = 𝐾nl𝑓 (𝜎) (22)
6 Mathematical Problems in Engineering
0 10 20 30 40 50 60 70
0
1
2
3
Alti
tude
(m)
Simulated modelMeasured output
−3
−2
−1
𝑡 (s)
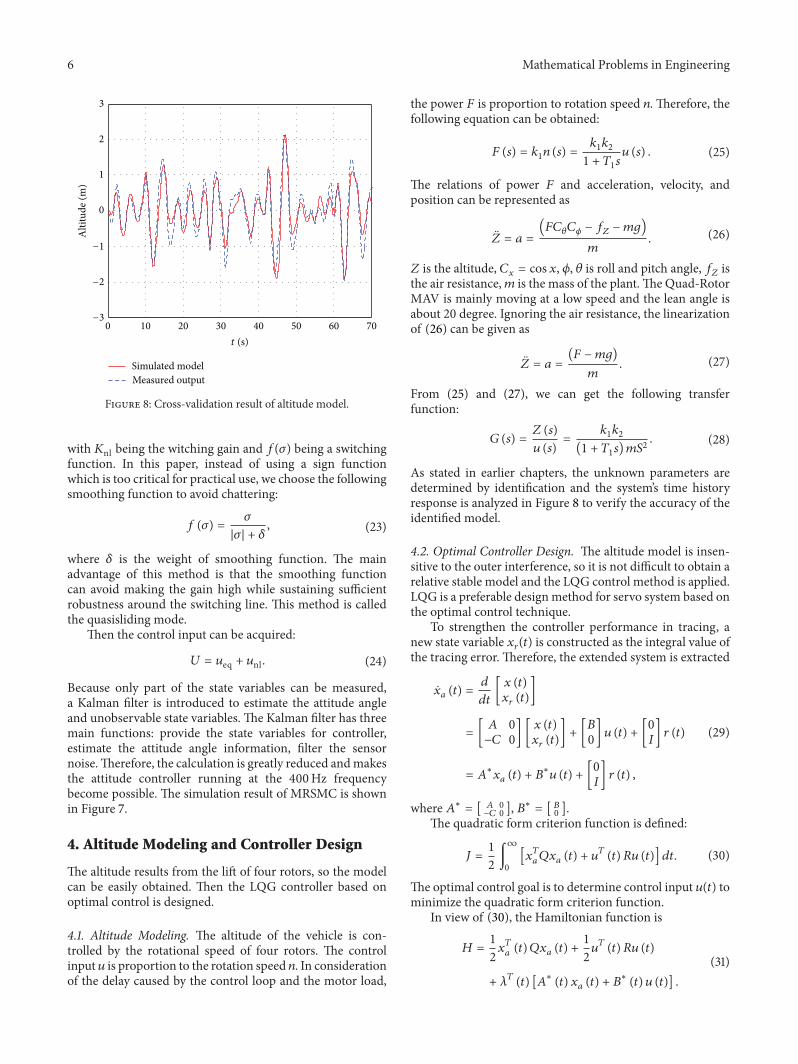
Figure 8: Cross-validation result of altitude model.
with 𝐾nl being the witching gain and 𝑓(𝜎) being a switchingfunction. In this paper, instead of using a sign functionwhich is too critical for practical use, we choose the followingsmoothing function to avoid chattering:
𝑓 (𝜎) =𝜎
|𝜎| + 𝛿, (23)
where 𝛿 is the weight of smoothing function. The mainadvantage of this method is that the smoothing functioncan avoid making the gain high while sustaining sufficientrobustness around the switching line. This method is calledthe quasisliding mode.
Then the control input can be acquired:
𝑈 = 𝑢eq + 𝑢nl. (24)
Because only part of the state variables can be measured,a Kalman filter is introduced to estimate the attitude angleand unobservable state variables. The Kalman filter has threemain functions: provide the state variables for controller,estimate the attitude angle information, filter the sensornoise.Therefore, the calculation is greatly reduced andmakesthe attitude controller running at the 400Hz frequencybecome possible. The simulation result of MRSMC is shownin Figure 7.
4. Altitude Modeling and Controller Design
The altitude results from the lift of four rotors, so the modelcan be easily obtained. Then the LQG controller based onoptimal control is designed.
4.1. Altitude Modeling. The altitude of the vehicle is con-trolled by the rotational speed of four rotors. The controlinput 𝑢 is proportion to the rotation speed 𝑛. In considerationof the delay caused by the control loop and the motor load,
the power 𝐹 is proportion to rotation speed 𝑛. Therefore, thefollowing equation can be obtained:
𝐹 (𝑠) = 𝑘1𝑛 (𝑠) =
𝑘1𝑘2
1 + 𝑇1𝑠𝑢 (𝑠) . (25)
The relations of power 𝐹 and acceleration, velocity, andposition can be represented as
�� = 𝑎 =
(𝐹𝐶𝜃𝐶𝜙− 𝑓𝑍− 𝑚𝑔)
𝑚. (26)
𝑍 is the altitude, 𝐶𝑥= cos𝑥, 𝜙, 𝜃 is roll and pitch angle, 𝑓
𝑍is
the air resistance,𝑚 is the mass of the plant.The Quad-RotorMAV is mainly moving at a low speed and the lean angle isabout 20 degree. Ignoring the air resistance, the linearizationof (26) can be given as
�� = 𝑎 =(𝐹 − 𝑚𝑔)
𝑚. (27)
From (25) and (27), we can get the following transferfunction:
𝐺 (𝑠) =𝑍 (𝑠)
𝑢 (𝑠)=
𝑘1𝑘2
(1 + 𝑇1𝑠)𝑚𝑆2
. (28)
As stated in earlier chapters, the unknown parameters aredetermined by identification and the system’s time historyresponse is analyzed in Figure 8 to verify the accuracy of theidentified model.
4.2. Optimal Controller Design. The altitude model is insen-sitive to the outer interference, so it is not difficult to obtain arelative stable model and the LQG control method is applied.LQG is a preferable designmethod for servo system based onthe optimal control technique.
To strengthen the controller performance in tracing, anew state variable 𝑥
𝑟(𝑡) is constructed as the integral value of
the tracing error. Therefore, the extended system is extracted
��𝑎(𝑡) =
𝑑
𝑑𝑡[𝑥 (𝑡)
𝑥𝑟(𝑡)]
= [𝐴 0
−𝐶 0] [
𝑥 (𝑡)
𝑥𝑟(𝑡)] + [
𝐵
0] 𝑢 (𝑡) + [
0
𝐼] 𝑟 (𝑡)
= 𝐴∗
𝑥𝑎(𝑡) + 𝐵
∗
𝑢 (𝑡) + [0
𝐼] 𝑟 (𝑡) ,
(29)
where 𝐴∗ = [𝐴 0
−𝐶 0], 𝐵∗ = [
𝐵
0].
The quadratic form criterion function is defined:
𝐽 =1
2∫
∞
0
[𝑥𝑇
𝑎𝑄𝑥𝑎(𝑡) + 𝑢
𝑇
(𝑡) 𝑅𝑢 (𝑡)] 𝑑𝑡. (30)
The optimal control goal is to determine control input 𝑢(𝑡) tominimize the quadratic form criterion function.
In view of (30), the Hamiltonian function is
𝐻 =1
2𝑥𝑇
𝑎(𝑡) 𝑄𝑥
𝑎(𝑡) +
1
2𝑢𝑇
(𝑡) 𝑅𝑢 (𝑡)
+ 𝜆𝑇
(𝑡) [𝐴∗
(𝑡) 𝑥𝑎(𝑡) + 𝐵
∗
(𝑡) 𝑢 (𝑡)] .
(31)

Mathematical Problems in Engineering 7
0 5 10 15 20 25 30 35 40 45 50
0
20
40
60
Ang
ular
(deg
)
Reference inputExperiment output
−60
−40
−20
Time (s)
(a)
0
5 10 15 20 25 30 35 40 45 500
50
100
Con
trol i
nput
Time (s)
−200
−150
−100
−50
(b)
Figure 9: Attitude experimental result.
Then the adjoint equation and boundary condition can beobtained:
�� (𝑡) = −𝜕𝐻
𝜕𝑥𝑎
= −𝐴∗𝑇
(𝑡) 𝜆 (𝑡) − 𝑄𝑥𝑎(𝑡) ,
𝜆 (𝑇) = 𝑆𝑥𝑎(𝑇) ,
𝜕𝐻
𝜕𝑢= 𝑅𝑢 (𝑡) + 𝐵
∗𝑇
(𝑡) 𝜆 (𝑡) = 0.
(32)
With condition 𝑅 is positive, the control input is obtained
𝑢 (𝑡) = −𝑅−1
𝐵∗𝑇
(𝑡) 𝜆 (𝑡) . (33)
Assuming the relationship between 𝜆(𝑡) state valuables, 𝑥𝑎(𝑡)
can be described as
𝜆 (𝑡) = 𝑃 (𝑡) 𝑥𝑎(𝑡) . (34)
When the time variable 𝑡 tends to infinity, the matrix 𝑃(𝑡)
becomes a constant, and it can be obtained from the Riccatiequation
𝑃𝐴∗
+ 𝐴∗𝑇
𝑃 − 𝑃𝐵∗
𝑅−1
𝐵∗𝑇
𝑃 + 𝑄 = 0. (35)
The feedback gain 𝐹 can be given as follows and the controlinput is obtained accordingly:
𝐹 = [𝐹1𝐹2] = 𝑅−1
𝐵∗𝑇
𝑃, (36)
𝑢 (𝑡) = −𝐹1𝑥 (𝑡) − 𝐹
2𝑥𝑟(𝑡) = −𝐹
1𝑥 (𝑡) − 𝐹
2∫
𝑡
0
𝑒 (𝑡) 𝑑𝑡.
(37)
0 5 10 15 20 25 30 35 40 45 50
0
100
200
Rollr
ate (
deg/
s)
Gyro measuredKalman calculated
−300
−200
−100
Time (s)
(a)
0 5 10 15 20 25 30 35 40 45 50
0123
Time (s)
Acceleration measuredKalman calculated
−4−3−2−1
Acc.
(m/s2)
(b)
Figure 10: Estimate result of roll angle and acceleration.
Since the controller is designed based on state feedback, itis necessary to obtain all the state conditions. In the altitudemodel obtained previously, the acceleration and the altitudevariable can be observed by the onboard sensors, and thereis still one state variable that is unavailable. Then a Kalmanfilter is designed to estimate the unavailable state variable, andit can also filter the noise in the meanwhile. Therefore, thecontrol performance is improved.
5. Experiments and Experimental Results
In order to verify the performance of our platform as wellas the properties of attitude and altitude controller, outdoorflight experiments are carried out. The operator sends thereference instruction to the Quad-Rotor by using a 72MhzPPM Propo. The flight data is transmitted to the groundstation by the XBee-pro wireless model.
5.1. Attitude Experiments. Firstly, a flight test of letting theMAV keep hovering and high-speed moving is performed.Figures 9 and 10 show the demonstration result. FromFigure 9, it is obvious that the output angle trajectory tracksthe reference angle well. Some beating points around 10 s and20 s may be caused by external force-like gust, but it canregain the stability soon. Figure 10 presents the comparison

8 Mathematical Problems in Engineering
0 10 20 30 40 50 60
0
20
40
60
80
Time (s)
Ang
ular
(deg
)
Reference inputExperiment output
−60
−40
−20
Figure 11: Robust experimental result.
ReferenceRealSimulation
0 5
0
2
4
6
10 15 20 25−2
Hei
ght (
m)
Time (s)
(a)
−50
0
0 5 10 15 20 25
50
100
150
200
Con
trol i
nput
Time (s)
(b)
Figure 12: Altitude experimental result.
result of the Roll angle velocity and the related accelerationby Kalman estimation and measured from sensors. It showsthat the estimated smooth lines keep the trend of the originalsensor data and the good filter result is obtained.
As to the system’s robustness, a comparison experimentis conducted between LQG and MRSMC technology for
attitude control with a 300 g payload. But when the LQGcontroller is installed, the flight performance degrades badlyand the operation of the vehicle becomes a difficulty. There-fore, only the MRSMC robust experiment is carried outsuccessfully.The corresponding plots can be seen in Figure 11.The tracking performance is acceptable considering the heavypayload and it shows that theMRSMC is insensitive to modelchange, so the good robustness is obtained.
5.2. Altitude Experiments. In the altitude test, a step signal of5m is given to the MAV after hovering stably for some timein a fixed altitude. Result from the flight test is shown in Fig-ure 12. The real-time experimental result follows simulationresult well and the outputs successfully tracks the referenceinput in about 5 s with a 0.5m overshoot. The controller alsohas a good stability by stable control input.
6. Conclusion
In this research, a brief introduction is given to the Quad-Rotor, which is selected as our controlled object. Then theattitude and altitude control is discussed. For the attitude,MRSMC is proposed due to its insensitiveness to parametricuncertainties, model errors, and outer disturbances.Whereasin altitude control, the model-based optimal controller isdesigned. To verify the performance of the controllers, thehovering control and guidance control are conducted in flightexperiments. By using MRSMC, the attitude controller alsoobtains good robustness. In the future, we will focus onvelocity and position control, so that the fully autonomousflight will be accomplished.
Acknowledgment
This work was supported by the scientific research fund ofNanjing University of Information Science & Technology.
References
[1] K. Nonami, F. Kendoul, S. Suzuki et al., Autonomous FlyingRobots: Unmanned Aerial Vehicles and Micro Aerial Vehicles,Springer, 2010.
[2] L. Doitsidis, S. Weiss, A. Renzaglia et al., “Optimal surveillancecoverage for teams of micro aerial vehicles in GPS-deniedenvironments using onboard vision,” Autonomous Robots, vol.33, no. 1-2, pp. 173–188, 2012.
[3] “Ascending Technologies GmbH,” http://www.asctec.de.[4] http://www.draganfly.com/.[5] W. Wang, K. Nonami, and Y. Ohira, “Model reference sliding
mode control of small helicopter X.R.B based on vision,”International Journal of Advanced Robotic Systems, vol. 5, no. 3,pp. 235–242, 2008.
[6] F. Kendoul, “Nonlinear hierarchical flight controller forunmanned rotorcraft: design, stability, and experiments,”Journal of Guidance, Control, and Dynamics, vol. 32, no. 6, pp.1954–1958, 2009.
[7] A. Drouot, E. Richard, and M. Boutayeb, “Nonlinear backstep-ping based trajectory tracking control of a gun launched micro

Mathematical Problems in Engineering 9
aerial vehicle,” in Proceedings of the AIAAGuidance, Navigation,and Control Conference, 2012.
[8] V. Ghadiok, J. Goldin, and W. Ren, “On the design anddevelopment of attitude stabilization, vision-based navigation,and aerial gripping for a low-cost quadrotor,” AutonomousRobots, vol. 33, no. 1-2, pp. 41–68, 2012.
[9] H. Yu and R. Beard, “A vision-based collision avoidance tech-nique formicro air vehicles using local-level framemapping andpath planning,” Autonomous Robots, vol. 34, no. 1-2, pp. 93–109,2013.
[10] X. B. Wang, C. Song, G. R. Zhao et al., “Obstacles avoidancefor UAV SLAM based on improved artificial potential field,”Applied Mechanics and Materials, vol. 241, pp. 1118–1121, 2013.
[11] G. R. Flores, J. Escareno, R. Lozano et al., “Quad-tilting rotorconvertible MAV: modeling and real-time hover flight control,”Journal of Intelligent & Robotic Systems, vol. 65, no. 1, pp. 457–471, 2012.
[12] W. Wang, F. Wang, Y. Zhou et al., “Modeling and embeddedautonomous control for quad-rotor MAV,” Applied Mechanicsand Materials, vol. 130, pp. 2461–2464, 2012.
[13] F. Kendoul, D. Lara, I. Fantoni-Coichot, and R. Lozano, “Real-timenonlinear embedded control for an autonomous quadrotorhelicopter,” Journal of Guidance, Control, and Dynamics, vol. 30,no. 4, pp. 1049–1061, 2007.
[14] T. Li, Y. Zhang, and B. W. Gordon, “Nonlinear fault-tolerantcontrol of a quadrotor uav based on sliding mode controltechnique,” in Proceedings of the 8th IFAC Symposium on FaultDetection, Supervision and Safety of Technical Processes, vol. 8,no. 1, pp. 1317–1322.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of


















