Research Article Assessment of Prestress Force in Bridges...
10
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 435939, 9 pages http://dx.doi.org/10.1155/2013/435939 Research Article Assessment of Prestress Force in Bridges Using Structural Dynamic Responses under Moving Vehicles Hao Li, Zhongrong Lv, and Jike Liu Department of Applied Mechanics and Engineering, Sun Yat-sen University, Guangzhou 510006, China Correspondence should be addressed to Zhongrong Lv; [email protected] Received 1 July 2013; Revised 7 August 2013; Accepted 10 August 2013 Academic Editor: Zhiqiang Hu Copyright © 2013 Hao Li et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is study carries out numerical simulations to identify the magnitude of prestress force in a highway bridge by making use of the dynamic responses from moving vehicular loads. e prestressed bridges are modeled using four-node isoparametric flat shell element taking into account the transverse shearing deformation in the finite element model. e vehicle is modeled as a multiple degrees-of-freedom system. An approach based on dynamic response sensitivity-based finite element model updating is proposed to identify the elemental prestress force. e identified results are obtained iteratively with the penalty function method with regularization from the measured structural dynamic responses. A single-span prestressed Tee beam and two-span prestressed box-girder bridge are studied as two numerical examples. e effects of road surface roughness, measurement noise, and speed of moving vehicle on the identification results are investigated. Studies indicate that the proposed method is efficient and robust for prestress force identification. Good identified results can be obtained from several measured acceleration responses. 1. Introduction ere are many researches in the literature which deal with the bridge vibration caused by the passing of vehicles or trains [1–11]. Akin and Mofid [1] proposed a combined analytical- numerical method to determine the dynamic behavior of beams with a moving mass. Hwang and Nowak [2] developed the models for trucks, road surface, and the bridge, and the calculated static and dynamic deflections are obtained as a function of gross vehicle weight, span, and axle distance. Yang and Lin [3] and Yang and Yau [4] studied dynamic responses of vehicle-bridge systems with the finite element method. Law and Zhu [5] investigated the bridge dynamic responses due to road surface roughness and braking of vehicle. Yau [7] investigated the interaction response of a train running over a suspension bridge. Wang et al. [9] studied the nonlinear dynamic response of a long-span suspension bridge under running train and turbulent wind. ese researches can be classified into the following categories: models of the vehicle, road surface roughness, bridge-vehicle interaction, the effect of vehicle braking, and so forth. In these studies, the parameters of the bridge and the vehicles are known and the dynamic responses of the bridge and/or the vehicle-bridge system can be obtained from forward analysis. In this study, we try to identify the prestress force from the dynamic responses induced by the passing vehicles on top of the bridges. It is known that the prestress force is one of the most important parameters in prestressed concrete bridges to control the cracks in concrete, to reduce deflection of the structure, and to add strength to the prestressed members. erefore, a substantial difference between the desired and the in-service prestress forces can result in severe serviceabil- ity and safety problems [12, 13]. It is known that the loss of pre- stress force occurs due to the friction between the prestressing tendon and the surrounding concrete, creep, and shrinkage of the concrete, steel relaxation or damage of the prestress strands. erefore, it is very important to estimate the real prestress level when the prestressed structures are in service. Abraham et al. [13] tried to predict the loss of prestress force based on a damage index derived from the derivatives of mode shapes without success. Miyamoto et al. [14] studied the behavior of a beam with unbonded tendons, and a formula was proposed for the prediction of the modal frequency for a given prestress force with laboratory and field test verifications. Saiidi et al. [15] also reported a study on modal frequencies due to the prestress force with laboratory test results. Recently, Kim et al. [16] proposed an approach to
Transcript of Research Article Assessment of Prestress Force in Bridges...

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 435939 9 pageshttpdxdoiorg1011552013435939
Research ArticleAssessment of Prestress Force in Bridges Using StructuralDynamic Responses under Moving Vehicles
Hao Li Zhongrong Lv and Jike Liu
Department of Applied Mechanics and Engineering Sun Yat-sen University Guangzhou 510006 China
Correspondence should be addressed to Zhongrong Lv lvzhrmailsysueducn
Received 1 July 2013 Revised 7 August 2013 Accepted 10 August 2013
Academic Editor Zhiqiang Hu
Copyright copy 2013 Hao Li et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This study carries out numerical simulations to identify the magnitude of prestress force in a highway bridge by making use ofthe dynamic responses from moving vehicular loads The prestressed bridges are modeled using four-node isoparametric flatshell element taking into account the transverse shearing deformation in the finite element model The vehicle is modeled as amultiple degrees-of-freedom system An approach based on dynamic response sensitivity-based finite element model updating isproposed to identify the elemental prestress force The identified results are obtained iteratively with the penalty function methodwith regularization from themeasured structural dynamic responses A single-span prestressed Tee beam and two-span prestressedbox-girder bridge are studied as two numerical examples The effects of road surface roughness measurement noise and speed ofmoving vehicle on the identification results are investigated Studies indicate that the proposed method is efficient and robust forprestress force identification Good identified results can be obtained from several measured acceleration responses
1 Introduction
There are many researches in the literature which deal withthe bridge vibration caused by the passing of vehicles or trains[1ndash11] Akin and Mofid [1] proposed a combined analytical-numerical method to determine the dynamic behavior ofbeams with amovingmass Hwang andNowak [2] developedthe models for trucks road surface and the bridge and thecalculated static and dynamic deflections are obtained as afunction of gross vehicle weight span and axle distance Yangand Lin [3] and Yang and Yau [4] studied dynamic responsesof vehicle-bridge systemswith the finite elementmethod Lawand Zhu [5] investigated the bridge dynamic responses dueto road surface roughness and braking of vehicle Yau [7]investigated the interaction response of a train running overa suspension bridge Wang et al [9] studied the nonlineardynamic response of a long-span suspension bridge underrunning train and turbulent wind These researches canbe classified into the following categories models of thevehicle road surface roughness bridge-vehicle interactionthe effect of vehicle braking and so forth In these studiesthe parameters of the bridge and the vehicles are known andthe dynamic responses of the bridge andor the vehicle-bridgesystem can be obtained from forward analysis
In this study we try to identify the prestress force from thedynamic responses induced by the passing vehicles on top ofthe bridges It is known that the prestress force is one of themost important parameters in prestressed concrete bridgesto control the cracks in concrete to reduce deflection of thestructure and to add strength to the prestressed membersTherefore a substantial difference between the desired andthe in-service prestress forces can result in severe serviceabil-ity and safety problems [12 13] It is known that the loss of pre-stress force occurs due to the friction between the prestressingtendon and the surrounding concrete creep and shrinkageof the concrete steel relaxation or damage of the prestressstrands Therefore it is very important to estimate the realprestress level when the prestressed structures are in service
Abraham et al [13] tried to predict the loss of prestressforce based on a damage index derived from the derivatives ofmode shapeswithout successMiyamoto et al [14] studied thebehavior of a beam with unbonded tendons and a formulawas proposed for the prediction of the modal frequencyfor a given prestress force with laboratory and field testverifications Saiidi et al [15] also reported a study on modalfrequencies due to the prestress force with laboratory testresults Recently Kim et al [16] proposed an approach to
2 Mathematical Problems in Engineering
identify the prestress loss in prestressed concrete beams usingthe modal information Lu and Law [17] presented a methodto identify the elemental prestress force using the structuraldynamic responses
In this paper the dynamic behavior of the Tee beambridge and the box-girder bridge is investigated using four-node isoparametric flat shell element the transverse shearingdeformation is taken into account in the finite elementmodelThen the coupling equation of motion of the bridge-vehiclesystem is established and the dynamic responses of the sys-tem are obtained from numerical integration method In theinverse analysis we attempt to identify the elemental prestressforce level making use of the dynamic responses induced bythe passing vehicles An approach based ondynamic responsesensitivity-based finite element model updating is proposedto identify the prestress force Two numerical examples arestudied to illustrate the correctness of the proposed methodSome aspects such as the effects of road surface roughnessmeasurement noise and speed of the moving vehicle onthe identification results are investigated Simulation studiesindicate that the proposedmethod is efficient and robust andgood identified results can be obtained
2 Formulation
21 Strain-Displacement Relationship In this paper the platshell element is used to establish the finite element model ofthe bridge This kind of element has five degrees-of-freedomfor each node and can be obtained from superimposing theplanar stress element on the plate bending element [18]
The strains of the flat shell include the inplane membranestrains 120576
119901 the curvature owing to the bending 120576119887 and the
transverse shearing strains 120576119904For the inplane membrane strains
120576119901=
120576119909
120576119910
120574119909119910
=
120597119906
120597119909
120597V
120597119910
120597V
120597119909
+
120597119906
120597119910
(1)
For bending strains
120576119887= minus119911
120581119909
120581119910
120581119909119910
= minus119911
120597120579119909
120597119909
120597120579119910
120597119910
120597120579119909
120597119910
+
120597120579119910
120597119909
(2)
For transverse shearing strains
120576119904=
120574119909119911
120574119910119911
=
120597119908
120597119909
minus 120579119909
120597119908
120597119910
minus 120579119910
(3)
The expressions for the strains-displacement matrices arededuced from (1)ndash(3) as
120576119901=
119873
sum
119894=1
[
[
[
[
[
119873(119898)
119894119909
119873(119898)
119894119910
119873(119898)
119894119910119873(119898)
119894119909
]
]
]
]
]
119906119894
V119894 =
119873
sum
119894=1
119861119898
119894119886(119898)
119894
120576119904=
119873
sum
119894=1
[
[
119873119908
119894119909minus119873120579
1198940
119873119908
1198941199100 minus119873
120579
119894
]
]
119908119894
(120579119909)119894
(120579119910)119894
=
119873
sum
119894=1
119861119904
119894119886(119904)
119894
120576119887=
119873
sum
119894=1
[
[
[
[
[
[
0 119873120579
1198941199090
0 0 119873120579
119894119910
0 119873120579
119894119910119873120579
119894119909
]
]
]
]
]
]
119908119894
(120579119909)119894
(120579119910)119894
=
119873
sum
119894=1
119861119887
119894119886(119887)
119894
(4)
where 119873 is the number of nodes of the element 119873(119898)119894
119873(119904)119894
and 119873(119887)
119894are the isoparametric shape functions of the plane
stress shear stress and bending stress respectively
22TheElementalMass and StiffnessMatrices Theconsistentelemental mass matrix can be expressed as
119898119890= int
119860
Θ119879120588119898Θ119889119860 (5)
where
120588119898 =
[
[
[
[
[
[
[
[
[
[
[
120588119905 0 0 0 0 0
0 120588119905 0 0 0 0
0 0 120588119905 0 0 0
0 0 0
1205881199053
12
0 0
0 0 0 0
1205881199053
12
0
0 0 0 0 0 0
]
]
]
]
]
]
]
]
]
]
]
Θ = [Θ1 Θ2 Θ119873]
(6)
in which
Θ119894 =
[
[
[
[
[
[
[
119873(119898)
119906119894
119873(119898)
V119894
119873(119908)
119894
119873(120579119909)
119894
119873
(120579119910)
119894
]
]
]
]
]
]
]
(7)
It is known that the global stiffness is singular or ill-conditioned because of the null diagonal terms due to thedrilling degrees of freedom in the transformed elementalstiffness matrix To solve this problem in this paper weartificially insert a rotational stiffness coefficient as it wasdone by Lee and Yhim [19] the artificial stiffness for thedrilling DOF is taken as 120574119896 = 10
7 in this study
Mathematical Problems in Engineering 3
1015
10
02
Tendon at support
Tendon at midspan
2
15
Symmetric
zy
x
m1 z1
k1m2 c
z2k2
(a)
1 2 3 19 20
22 2321 4039middot middot middot
middot middot middot
(b)
4241 43 6059middot middot middot
(c)
Figure 1 (a) Vehicle models and the geometry of the simply supported Tee beam (dimension in meter) (b) Element number for the flangeof the Tee beam (c) Element number for the web of the Tee beam
Elemental stiffness matrix of the concrete bridge isexpressed as
119870119890= int
119860
(119861119901
119894)
119879
119863119901119861119901
119895119889119860 + int
119860
(119861119904
119894)119879119863119904119861119904
119895119889119860
+ int
119860
(119861119887
119894)
119879
119863119887119861119887
119895119889119860
+ int
119860
119866119879
119894[
119879119901
11990900
0 119879119901
1199100
]119866119895119889119860
(8)
where 119863119901 119863119904 and 119863
119887 are the material property matrices forplane stress shear stress and bending stress
119866119894 =[
[
119873119906
119894119909119873
V119894119909
119873119908
1198941199090 0 0
119873119906
119894119910119873
V119894119910
119873119908
1198941199100 0 0
]
]
(9)
119879119901
1199090and 119879
119901
1199100are the two components of the prestress force in
119909- and 119910-axis respectivelyAfter assembling the elemental stiffness and mass matri-
ces into systemmatrices the equation ofmotion of the bridgestructure can be written as
119872119887
119889 + 119862119887
119889 + 119870119887119889 = 119867119888119875int (10)
where119872119887 and119870119887 are the system mass and stiffness matricesrespectively119862119887 is the damping matrix in this study Rayleighdamping model is used that is 119862 = 1205721119872119887 + 1205722119870119887 where1205721 and 1205722 are two constants
119889 119889 and 119889 are the acceleration
velocity and displacement responses of the structure respec-tively 119875int is the interaction force between the bridge andthe vehicle 119867119888 is a matrix with zero entries except at theDOFs corresponding to the nodal displacements of the shellelements on which the load is acting
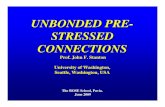
23 Equation of Motion for the Vehicle-5-Parameter VehicleModel The five-parameter vehicle model of the two degree-of-freedom system shown in Figure 1 comprises five compo-nents an upper mass119898V1 of the suspension a lowermass119898V2
of the bogie and axle connected to the suspension damper119888V and a suspension spring 119896V1 together with another spring119896V2 which is used to represent the stiffness of the tyre Theequations of motion of the masses 119898V1 and 119898V2 are
119898V11 + 119888V (1 minus 2) + 119896V1 (1199111 minus 1199112) = 0 (11)
119898V22 + 119888V (2 minus 1) + 119896V1 (1199112 minus 1199111)
+ 119896V2 (1199112 minus (119908 (119909 119910 119905) + 119903 (119909))) = 0
(12)
where 1 1 and 1199111 are the vertical acceleration velocity anddisplacement responses of the suspension mass of vehiclerespectively and 2 2 and 1199112 are the vertical accelerationvelocity and displacement responses of the bogie and axle119903(119909) is the road surface roughness at the location of thetyre [20] which will be given in the next subsection Itshould be pointed out that in (12) the additional velocityand acceleration due to road surface roughness may be takeninto account to determine the movement of the vehicle wheelas discussed by Chang et al [21] The interaction force 119875intbetween the bridge and the vehicle can be expressed as
119875int = (119898V1 + 119898V2) 119892 + 119896V2 (1199112 minus (119908 (119909 119910 119905) + 119903 (119909)))
= (119898V1 + 119898V2) 119892 minus 119898V11 minus 119898V22
(13)
4 Mathematical Problems in Engineering
Equations (10) (11) and (12) can be combined in acompact form and the coupled vehicle-bridge equations ofmotion can be written as
[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119889
1
2
+[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119889
1
2
+[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119889
1199111
1199112
=
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(14)
Let
119872119904 =[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119862119904 =[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119870119904 =[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119877119904 =
119889
1199111
1199112
119875 (119905) =
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(15)
Equation (14) can be rewritten as
119872119904119904 + 119862119904119904 + 119870119904119877119904 = 119875 (119905) (16)
The dynamic responses of the bridge and vehicle can beobtained from a step-by-step solution using the state spacemethod [22]
24 Road Surface Roughness The randomness of the roadsurface roughness of the bridge can be represented with aperiodic modulated random process It is specified by itspower spectral density function (PSD) as [23]
119878119903 (120596119904) = 119860119903(120596119904
1205961199040
)
minus2
(17)
where119860119903 is the roughness coefficient inm2cyclem120596119904 is thespatial frequency in cyclem120596119904 is the discontinuity frequencyequal to 12120587 (cyclem)
The road surface roughness function 119903(119909) can be gener-ated from (17) using the FFT algorithm [23] which is givenby
119903 (119909) =
119873
sum
119894=1
(4119860119903(2120587119894
1198711198881205961199040
)
minus22120587
119871119888
)
12
cos (120596119904119894119909 minus 120579119894) (18)
where 120596119904119894 = 119894Δ120596119904 with Δ120596119904 = 2120587119871119888 in which 119871119888 is twicethe length of the bridge 120579119894 is a random number distributeduniformly between 0 and 2120587
25 Dynamic Response Sensitivity with Respect to PrestressForce Differentiating both sides of (16) with respect to theprestress force of the 119894th element we have
119872119904
120597119904
120597119879119894
+ 119862119904
120597119904
120597119879119894
+ 119870119904
120597119877119904
120597119879119894
+ 1205722
120597119870119904
120597119879119894
119877119904 +120597119870119904
120597119879119894
119877119904 = 0 (19)
Let 119863 = 120597119877119904120597119879119894 = 120597119904120597119879119894 and = 120597119904120597119879119894 sincethe global matrix 119870119904 is the function of the prestress force 119879the partial derivative 120597119870119904120597119879119894 can be obtained directly Thefourth and fifth terms in (19) on the left-hand side can beremoved to the right-hand side as the ldquoinput forcerdquo Equation(19) can be rewritten as
119872119904 + 119862119904 + 119870119904119863 = minus1205722
120597119870119904
120597119879119894
119904 minus120597119870119904
120597119879119894
119877119904(20)
Similarly the dynamic response sensitivities 119863 can beobtained from (20)
26 Identification of Prestress Force from Measured DynamicResponse The identification problem is to find the vector ofprestress force 119879 such that the calculated responses 119877119904 bestmatch the measured responses that is
[119876] 119877119904 = (21)
where the selection matrix [119876] is a constant matrix withelements of zeros or ones whichmaps the degrees of freedomof the system to the measured degrees of freedom 119877119904 and are the vectors of calculated and measured dynamicresponses of the system respectively The inverse problem isto minimize the error between the calculated and measuredresponses as
120575119877 = minus [119876] 119877119904 = minus 119877cal (22)
Aswe have no idea of themagnitude of the prestress forcethe initial value for the elemental prestress force is set as anull vector The corresponding response 119877
0
119904and the response
sensitivity matrix 1198780 are obtained from (16) and (20) with
superscript ldquo0rdquo denoting the initial set of valuesAt the 119895th iteration the difference between the measured
and calculated system responses can be expressed as
Δ119877119895= minus 119877
119895
cal (119895 = 0 1 2 ) (23)
Using the penalty function method [24] the vector ofthe prestress force increment Δ119879
119895 can be obtained from thefollowing equation
[119878
119895] Δ119879
119895 = Δ119877
119895 (24)
Mathematical Problems in Engineering 5
where [119878
119895] is a 119899119905 times 119873 matrix selected from the sensitivity
matrix [119878119895] 119873 is the number of unknown of prestress force
119899119905 is the number of measured data points It is noted that 119899119905should be greater than 119873 to make sure that the equation isover-determined Equation (24) can be solved by the dampedleast-squares method [25] with bounds to the solution
Δ119879119895 = ([119878
119895]
119879
[119878
119895] + 120582119868)
minus1
[119878
119895]
119879
Δ119877119895 (25)
where 120582 is the nonnegative damping (regularization) coeffi-cient governing the participation of least-squares error in thesolution The solution of (24) is equivalent to minimize thefunction
119869 (Δ119879119894 120582) =
100381710038171003817100381710038171003817
[119878
119895] Δ119877
119895 minus Δ119879
119895
100381710038171003817100381710038171003817
2
+ 120582
10038171003817100381710038171003817Δ119879119895
10038171003817100381710038171003817
2 (26)
with the second term in (26) providing bounds to thesolution When the parameter 120582 approaches to zero theestimated vector Δ119879
119895 approaches to the solution obtained
from the simple least-squares methodThe updated prestress force 119879
119895+1 = 119879
119895 + Δ119879
119895 (119895 =
0 1 2 ) is calculated in the next iteration and the dynamicresponse 119877
119895+1 and response sensitivity 119878119895+1 are also recal-
culated The convergence is considered achieved when thefollowing criterion is met
10038171003817100381710038171003817119879119896+1
minus 119879119896
10038171003817100381710038171003817
10038171003817100381710038171198791198961003817100381710038171003817
le tolerance (27)
where 119896 denotes the 119896th iteration The tolerance is taken as1 times 10
minus7 in this studyThe relative error in identified results in each element is
defined as
RE =
(119879119894)identified minus (119879119894)true(119879119894)true
times 100 (119894 = 1 2 119873)
(28)
3 Numerical Simulations
31 APrestressedTee Beam TheprestressedTee beam studiedby Figueiras and Povoas [26] was used as the first numericalexample in this paper The beam is simply supported andprestressed with a parabolic tendon The geometry of thebeam is shown in Figure 1(a) The mechanical properties ofthe concrete are Youngrsquos modulus 119864119888 = 34 times 10
10 Pa massdensity 120588119888 = 2800 kgm3 and Poisson ratio 120592 = 018 Themechanical properties of the prestressing tendon are Youngrsquosmodulus 119864119901 = 210GPa mass density 120588119901 = 7800 kgm3 Themagnitude of the prestress force is 3MN and the prestressingtendon is assumed to be perfectly bonded and no prestressloss is taken into account
In the finite element of the beam the flange is discretizedinto two 4-node isoparametric flat shell elements in the trans-verse direction and 20 elements in the longitudinal directionThe web is discretized into 20 elements in the longitudinaldirection Figures 1(b) and 1(c) show the finite element
Table 1 Identified results for different road surface roughness
Road surface roughnessClass A Class B Class C Class D
Max error () 001 002 002 005Iteration number 12 12 13 18120582optimal 121 times 10
minus9123 times 10
minus9130 times 10
minus9149 times 10
minus9
number sequence of Tee beam From the free vibrationanalysis the first nine natural frequencies of the prestressedbeam are 630 7441 8268 21545 21923 24243 3507536847 and 47075Hz respectively The modal damping ratiois taken as 001 for the first two modes to obtain the twocoefficients in Rayleigh damping
The parameters of the five-parameter vehicle model are119898V1 = 36 times 10
3 kg 119898V2 = 025 times 103 kg 119888V = 10 times 10
3Nsm119896V1 = 60 times 10
5Nm and 119896V2 = 85 times 105Nm The
traveling speed of the vehicle is assumed to be 20ms ClassesA to D road surface roughness is included Figure 2 givesa comparison on the displacement responses of the vehicleand that at the middle point of the flange for different roadroughness coefficients From this figure one can find thatthe road roughness coefficient has significant effect on theresponses for both the bridge and the vehicle
To simulate the effect of measurement noise a normallydistributed random error with zeromean and a unit standarddeviation is added to the calculated acceleration as
119877 = cal + 119864119901 times 119873oise times var (cal) (29)
where 119877 is the vectors of measured structural acceleration
response 119864119901 is the noise level119873oise is a standard normal dis-tribution vector with zero mean and unit standard deviationvar(cal) is the variance of the time history
Study Case 1 Effect of Different Road Surface RoughnessIn this case we make use of the noise-free accelerationresponse of the bridge induced by the vehicle passing on topof the bridge at a speed of 10ms to identify the prestressforce with different road surface roughness The samplingrate is 100Hz which is high enough to include the firstnine frequencies of the bridge and the measurement timeduration is 2 seconds in the identificationThree accelerationmeasurements located at 1198714 1198712 and 31198714 of the bridgeat the bottom of the web are used for the prestress forceidentification The maximum errors in identified result foreach road surface roughness are listed in Table 1 One can findthe prestress force in each element has been identified withvery high accuracy for each road surface roughness Figure 3shows the identified results for road roughness Class B
Study Case 2 Effect of Different Vehicle Speed Three differentvehicle speeds are studied that is 10ms 20ms and 40msand the corresponding measurement time duration is 2seconds The sampling rate is 100Hz The same vehicle andmeasurement locations as Study Case 1 are used Class B
6 Mathematical Problems in Engineering
0
001
002
003
004
Time (s)
Disp
lace
men
t (m
)
0 01 02 03 04 05 06 07 08 09 1minus001
Class B Class A
Class C Class D
(a)
02
Class B Class A
Class C Class D
Time (s)0 01 02 03 04 05 06 07 08 09 1
minus2
minus4
minus6
minus8
minus10
minus12
times10minus4
Disp
lace
men
t (m
)
(b)
Figure 2 Effect of road roughness on the displacement responses of the vehicle and the beam ((a) the vehicle (b) middle span point of thebeam)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35
times106
Figure 3 Identified elemental prestress force (without noise)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35times106
Figure 4 Identified elemental prestress force (with 10 noise)
road surface roughness is assumed The maximum errors inidentified results for each speed are summarized in Table 2This table indicates that different vehicle speed has little effecton the identified results
Table 2 Identified results for different vehicle speed
Vehicle speed (ms)10 20 40
Max error () 002 002 002Iteration number 12 13 13120582optimal 123 times 10
minus9124 times 10
minus9124 times 10
minus9
Table 3 Identified results for different noise level
Measurement noise1 5 10
Max error () 165 224 411Iteration number 14 15 17120582optimal 563 times 10
minus9912 times 10
minus9104 times 10
minus8
Study Case 3 Effect of Different Measurement Noise Thesame three acceleration measurements as Study Case 1 con-taminated with different noise levels that is 1 5 and10 are studied The maximum errors in identified resultfor each noise level are listed in Table 3 From this tableone can find that the effect of measurement noise on theidentified results is not significant Even for 10 noise levelthe maximum identification error is 411 This indicates theidentified results are insensitive to the measurement noiseFigure 4 shows the identified results in which the noise levelis 10
32 A Prestressed Box-Girder Bridge A two-span prestressedbox-girder bridge is studied in this numerical example asshown in Figure 5(a) The dimension of the bridge is shownin Figure 5(a) Physical parameters of the bridge are Youngrsquosmodulus 119864 = 34times10
10 Pa mass density 120588 = 25times103 kgm3
The bridge is assumed to be jacked at both ends and themagnitude of the prestress force at the jack is assumed to be119879 = 4MN in the left rib and 119879 = 6MN in the right rib Thelayout of prestressing tendon is parabolicThe prestress loss is
Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
identify the prestress loss in prestressed concrete beams usingthe modal information Lu and Law [17] presented a methodto identify the elemental prestress force using the structuraldynamic responses
In this paper the dynamic behavior of the Tee beambridge and the box-girder bridge is investigated using four-node isoparametric flat shell element the transverse shearingdeformation is taken into account in the finite elementmodelThen the coupling equation of motion of the bridge-vehiclesystem is established and the dynamic responses of the sys-tem are obtained from numerical integration method In theinverse analysis we attempt to identify the elemental prestressforce level making use of the dynamic responses induced bythe passing vehicles An approach based ondynamic responsesensitivity-based finite element model updating is proposedto identify the prestress force Two numerical examples arestudied to illustrate the correctness of the proposed methodSome aspects such as the effects of road surface roughnessmeasurement noise and speed of the moving vehicle onthe identification results are investigated Simulation studiesindicate that the proposedmethod is efficient and robust andgood identified results can be obtained
2 Formulation
21 Strain-Displacement Relationship In this paper the platshell element is used to establish the finite element model ofthe bridge This kind of element has five degrees-of-freedomfor each node and can be obtained from superimposing theplanar stress element on the plate bending element [18]
The strains of the flat shell include the inplane membranestrains 120576
119901 the curvature owing to the bending 120576119887 and the
transverse shearing strains 120576119904For the inplane membrane strains
120576119901=
120576119909
120576119910
120574119909119910
=
120597119906
120597119909
120597V
120597119910
120597V
120597119909
+
120597119906
120597119910
(1)
For bending strains
120576119887= minus119911
120581119909
120581119910
120581119909119910
= minus119911
120597120579119909
120597119909
120597120579119910
120597119910
120597120579119909
120597119910
+
120597120579119910
120597119909
(2)
For transverse shearing strains
120576119904=
120574119909119911
120574119910119911
=
120597119908
120597119909
minus 120579119909
120597119908
120597119910
minus 120579119910
(3)
The expressions for the strains-displacement matrices arededuced from (1)ndash(3) as
120576119901=
119873
sum
119894=1
[
[
[
[
[
119873(119898)
119894119909
119873(119898)
119894119910
119873(119898)
119894119910119873(119898)
119894119909
]
]
]
]
]
119906119894
V119894 =
119873
sum
119894=1
119861119898
119894119886(119898)
119894
120576119904=
119873
sum
119894=1
[
[
119873119908
119894119909minus119873120579
1198940
119873119908
1198941199100 minus119873
120579
119894
]
]
119908119894
(120579119909)119894
(120579119910)119894
=
119873
sum
119894=1
119861119904
119894119886(119904)
119894
120576119887=
119873
sum
119894=1
[
[
[
[
[
[
0 119873120579
1198941199090
0 0 119873120579
119894119910
0 119873120579
119894119910119873120579
119894119909
]
]
]
]
]
]
119908119894
(120579119909)119894
(120579119910)119894
=
119873
sum
119894=1
119861119887
119894119886(119887)
119894
(4)
where 119873 is the number of nodes of the element 119873(119898)119894
119873(119904)119894
and 119873(119887)
119894are the isoparametric shape functions of the plane
stress shear stress and bending stress respectively
22TheElementalMass and StiffnessMatrices Theconsistentelemental mass matrix can be expressed as
119898119890= int
119860
Θ119879120588119898Θ119889119860 (5)
where
120588119898 =
[
[
[
[
[
[
[
[
[
[
[
120588119905 0 0 0 0 0
0 120588119905 0 0 0 0
0 0 120588119905 0 0 0
0 0 0
1205881199053
12
0 0
0 0 0 0
1205881199053
12
0
0 0 0 0 0 0
]
]
]
]
]
]
]
]
]
]
]
Θ = [Θ1 Θ2 Θ119873]
(6)
in which
Θ119894 =
[
[
[
[
[
[
[
119873(119898)
119906119894
119873(119898)
V119894
119873(119908)
119894
119873(120579119909)
119894
119873
(120579119910)
119894
]
]
]
]
]
]
]
(7)
It is known that the global stiffness is singular or ill-conditioned because of the null diagonal terms due to thedrilling degrees of freedom in the transformed elementalstiffness matrix To solve this problem in this paper weartificially insert a rotational stiffness coefficient as it wasdone by Lee and Yhim [19] the artificial stiffness for thedrilling DOF is taken as 120574119896 = 10
7 in this study
Mathematical Problems in Engineering 3
1015
10
02
Tendon at support
Tendon at midspan
2
15
Symmetric
zy
x
m1 z1
k1m2 c
z2k2
(a)
1 2 3 19 20
22 2321 4039middot middot middot
middot middot middot
(b)
4241 43 6059middot middot middot
(c)
Figure 1 (a) Vehicle models and the geometry of the simply supported Tee beam (dimension in meter) (b) Element number for the flangeof the Tee beam (c) Element number for the web of the Tee beam
Elemental stiffness matrix of the concrete bridge isexpressed as
119870119890= int
119860
(119861119901
119894)
119879
119863119901119861119901
119895119889119860 + int
119860
(119861119904
119894)119879119863119904119861119904
119895119889119860
+ int
119860
(119861119887
119894)
119879
119863119887119861119887
119895119889119860
+ int
119860
119866119879
119894[
119879119901
11990900
0 119879119901
1199100
]119866119895119889119860
(8)
where 119863119901 119863119904 and 119863
119887 are the material property matrices forplane stress shear stress and bending stress
119866119894 =[
[
119873119906
119894119909119873
V119894119909
119873119908
1198941199090 0 0
119873119906
119894119910119873
V119894119910
119873119908
1198941199100 0 0
]
]
(9)
119879119901
1199090and 119879
119901
1199100are the two components of the prestress force in
119909- and 119910-axis respectivelyAfter assembling the elemental stiffness and mass matri-
ces into systemmatrices the equation ofmotion of the bridgestructure can be written as
119872119887
119889 + 119862119887
119889 + 119870119887119889 = 119867119888119875int (10)
where119872119887 and119870119887 are the system mass and stiffness matricesrespectively119862119887 is the damping matrix in this study Rayleighdamping model is used that is 119862 = 1205721119872119887 + 1205722119870119887 where1205721 and 1205722 are two constants
119889 119889 and 119889 are the acceleration
velocity and displacement responses of the structure respec-tively 119875int is the interaction force between the bridge andthe vehicle 119867119888 is a matrix with zero entries except at theDOFs corresponding to the nodal displacements of the shellelements on which the load is acting
23 Equation of Motion for the Vehicle-5-Parameter VehicleModel The five-parameter vehicle model of the two degree-of-freedom system shown in Figure 1 comprises five compo-nents an upper mass119898V1 of the suspension a lowermass119898V2
of the bogie and axle connected to the suspension damper119888V and a suspension spring 119896V1 together with another spring119896V2 which is used to represent the stiffness of the tyre Theequations of motion of the masses 119898V1 and 119898V2 are
119898V11 + 119888V (1 minus 2) + 119896V1 (1199111 minus 1199112) = 0 (11)
119898V22 + 119888V (2 minus 1) + 119896V1 (1199112 minus 1199111)
+ 119896V2 (1199112 minus (119908 (119909 119910 119905) + 119903 (119909))) = 0
(12)
where 1 1 and 1199111 are the vertical acceleration velocity anddisplacement responses of the suspension mass of vehiclerespectively and 2 2 and 1199112 are the vertical accelerationvelocity and displacement responses of the bogie and axle119903(119909) is the road surface roughness at the location of thetyre [20] which will be given in the next subsection Itshould be pointed out that in (12) the additional velocityand acceleration due to road surface roughness may be takeninto account to determine the movement of the vehicle wheelas discussed by Chang et al [21] The interaction force 119875intbetween the bridge and the vehicle can be expressed as
119875int = (119898V1 + 119898V2) 119892 + 119896V2 (1199112 minus (119908 (119909 119910 119905) + 119903 (119909)))
= (119898V1 + 119898V2) 119892 minus 119898V11 minus 119898V22
(13)
4 Mathematical Problems in Engineering
Equations (10) (11) and (12) can be combined in acompact form and the coupled vehicle-bridge equations ofmotion can be written as
[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119889
1
2
+[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119889
1
2
+[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119889
1199111
1199112
=
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(14)
Let
119872119904 =[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119862119904 =[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119870119904 =[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119877119904 =
119889
1199111
1199112
119875 (119905) =
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(15)
Equation (14) can be rewritten as
119872119904119904 + 119862119904119904 + 119870119904119877119904 = 119875 (119905) (16)
The dynamic responses of the bridge and vehicle can beobtained from a step-by-step solution using the state spacemethod [22]
24 Road Surface Roughness The randomness of the roadsurface roughness of the bridge can be represented with aperiodic modulated random process It is specified by itspower spectral density function (PSD) as [23]
119878119903 (120596119904) = 119860119903(120596119904
1205961199040
)
minus2
(17)
where119860119903 is the roughness coefficient inm2cyclem120596119904 is thespatial frequency in cyclem120596119904 is the discontinuity frequencyequal to 12120587 (cyclem)
The road surface roughness function 119903(119909) can be gener-ated from (17) using the FFT algorithm [23] which is givenby
119903 (119909) =
119873
sum
119894=1
(4119860119903(2120587119894
1198711198881205961199040
)
minus22120587
119871119888
)
12
cos (120596119904119894119909 minus 120579119894) (18)
where 120596119904119894 = 119894Δ120596119904 with Δ120596119904 = 2120587119871119888 in which 119871119888 is twicethe length of the bridge 120579119894 is a random number distributeduniformly between 0 and 2120587
25 Dynamic Response Sensitivity with Respect to PrestressForce Differentiating both sides of (16) with respect to theprestress force of the 119894th element we have
119872119904
120597119904
120597119879119894
+ 119862119904
120597119904
120597119879119894
+ 119870119904
120597119877119904
120597119879119894
+ 1205722
120597119870119904
120597119879119894
119877119904 +120597119870119904
120597119879119894
119877119904 = 0 (19)
Let 119863 = 120597119877119904120597119879119894 = 120597119904120597119879119894 and = 120597119904120597119879119894 sincethe global matrix 119870119904 is the function of the prestress force 119879the partial derivative 120597119870119904120597119879119894 can be obtained directly Thefourth and fifth terms in (19) on the left-hand side can beremoved to the right-hand side as the ldquoinput forcerdquo Equation(19) can be rewritten as
119872119904 + 119862119904 + 119870119904119863 = minus1205722
120597119870119904
120597119879119894
119904 minus120597119870119904
120597119879119894
119877119904(20)
Similarly the dynamic response sensitivities 119863 can beobtained from (20)
26 Identification of Prestress Force from Measured DynamicResponse The identification problem is to find the vector ofprestress force 119879 such that the calculated responses 119877119904 bestmatch the measured responses that is
[119876] 119877119904 = (21)
where the selection matrix [119876] is a constant matrix withelements of zeros or ones whichmaps the degrees of freedomof the system to the measured degrees of freedom 119877119904 and are the vectors of calculated and measured dynamicresponses of the system respectively The inverse problem isto minimize the error between the calculated and measuredresponses as
120575119877 = minus [119876] 119877119904 = minus 119877cal (22)
Aswe have no idea of themagnitude of the prestress forcethe initial value for the elemental prestress force is set as anull vector The corresponding response 119877
0
119904and the response
sensitivity matrix 1198780 are obtained from (16) and (20) with
superscript ldquo0rdquo denoting the initial set of valuesAt the 119895th iteration the difference between the measured
and calculated system responses can be expressed as
Δ119877119895= minus 119877
119895
cal (119895 = 0 1 2 ) (23)
Using the penalty function method [24] the vector ofthe prestress force increment Δ119879
119895 can be obtained from thefollowing equation
[119878
119895] Δ119879
119895 = Δ119877
119895 (24)
Mathematical Problems in Engineering 5
where [119878
119895] is a 119899119905 times 119873 matrix selected from the sensitivity
matrix [119878119895] 119873 is the number of unknown of prestress force
119899119905 is the number of measured data points It is noted that 119899119905should be greater than 119873 to make sure that the equation isover-determined Equation (24) can be solved by the dampedleast-squares method [25] with bounds to the solution
Δ119879119895 = ([119878
119895]
119879
[119878
119895] + 120582119868)
minus1
[119878
119895]
119879
Δ119877119895 (25)
where 120582 is the nonnegative damping (regularization) coeffi-cient governing the participation of least-squares error in thesolution The solution of (24) is equivalent to minimize thefunction
119869 (Δ119879119894 120582) =
100381710038171003817100381710038171003817
[119878
119895] Δ119877
119895 minus Δ119879
119895
100381710038171003817100381710038171003817
2
+ 120582
10038171003817100381710038171003817Δ119879119895
10038171003817100381710038171003817
2 (26)
with the second term in (26) providing bounds to thesolution When the parameter 120582 approaches to zero theestimated vector Δ119879
119895 approaches to the solution obtained
from the simple least-squares methodThe updated prestress force 119879
119895+1 = 119879
119895 + Δ119879
119895 (119895 =
0 1 2 ) is calculated in the next iteration and the dynamicresponse 119877
119895+1 and response sensitivity 119878119895+1 are also recal-
culated The convergence is considered achieved when thefollowing criterion is met
10038171003817100381710038171003817119879119896+1
minus 119879119896
10038171003817100381710038171003817
10038171003817100381710038171198791198961003817100381710038171003817
le tolerance (27)
where 119896 denotes the 119896th iteration The tolerance is taken as1 times 10
minus7 in this studyThe relative error in identified results in each element is
defined as
RE =
(119879119894)identified minus (119879119894)true(119879119894)true
times 100 (119894 = 1 2 119873)
(28)
3 Numerical Simulations
31 APrestressedTee Beam TheprestressedTee beam studiedby Figueiras and Povoas [26] was used as the first numericalexample in this paper The beam is simply supported andprestressed with a parabolic tendon The geometry of thebeam is shown in Figure 1(a) The mechanical properties ofthe concrete are Youngrsquos modulus 119864119888 = 34 times 10
10 Pa massdensity 120588119888 = 2800 kgm3 and Poisson ratio 120592 = 018 Themechanical properties of the prestressing tendon are Youngrsquosmodulus 119864119901 = 210GPa mass density 120588119901 = 7800 kgm3 Themagnitude of the prestress force is 3MN and the prestressingtendon is assumed to be perfectly bonded and no prestressloss is taken into account
In the finite element of the beam the flange is discretizedinto two 4-node isoparametric flat shell elements in the trans-verse direction and 20 elements in the longitudinal directionThe web is discretized into 20 elements in the longitudinaldirection Figures 1(b) and 1(c) show the finite element
Table 1 Identified results for different road surface roughness
Road surface roughnessClass A Class B Class C Class D
Max error () 001 002 002 005Iteration number 12 12 13 18120582optimal 121 times 10
minus9123 times 10
minus9130 times 10
minus9149 times 10
minus9
number sequence of Tee beam From the free vibrationanalysis the first nine natural frequencies of the prestressedbeam are 630 7441 8268 21545 21923 24243 3507536847 and 47075Hz respectively The modal damping ratiois taken as 001 for the first two modes to obtain the twocoefficients in Rayleigh damping
The parameters of the five-parameter vehicle model are119898V1 = 36 times 10
3 kg 119898V2 = 025 times 103 kg 119888V = 10 times 10
3Nsm119896V1 = 60 times 10
5Nm and 119896V2 = 85 times 105Nm The
traveling speed of the vehicle is assumed to be 20ms ClassesA to D road surface roughness is included Figure 2 givesa comparison on the displacement responses of the vehicleand that at the middle point of the flange for different roadroughness coefficients From this figure one can find thatthe road roughness coefficient has significant effect on theresponses for both the bridge and the vehicle
To simulate the effect of measurement noise a normallydistributed random error with zeromean and a unit standarddeviation is added to the calculated acceleration as
119877 = cal + 119864119901 times 119873oise times var (cal) (29)
where 119877 is the vectors of measured structural acceleration
response 119864119901 is the noise level119873oise is a standard normal dis-tribution vector with zero mean and unit standard deviationvar(cal) is the variance of the time history
Study Case 1 Effect of Different Road Surface RoughnessIn this case we make use of the noise-free accelerationresponse of the bridge induced by the vehicle passing on topof the bridge at a speed of 10ms to identify the prestressforce with different road surface roughness The samplingrate is 100Hz which is high enough to include the firstnine frequencies of the bridge and the measurement timeduration is 2 seconds in the identificationThree accelerationmeasurements located at 1198714 1198712 and 31198714 of the bridgeat the bottom of the web are used for the prestress forceidentification The maximum errors in identified result foreach road surface roughness are listed in Table 1 One can findthe prestress force in each element has been identified withvery high accuracy for each road surface roughness Figure 3shows the identified results for road roughness Class B
Study Case 2 Effect of Different Vehicle Speed Three differentvehicle speeds are studied that is 10ms 20ms and 40msand the corresponding measurement time duration is 2seconds The sampling rate is 100Hz The same vehicle andmeasurement locations as Study Case 1 are used Class B
6 Mathematical Problems in Engineering
0
001
002
003
004
Time (s)
Disp
lace
men
t (m
)
0 01 02 03 04 05 06 07 08 09 1minus001
Class B Class A
Class C Class D
(a)
02
Class B Class A
Class C Class D
Time (s)0 01 02 03 04 05 06 07 08 09 1
minus2
minus4
minus6
minus8
minus10
minus12
times10minus4
Disp
lace
men
t (m
)
(b)
Figure 2 Effect of road roughness on the displacement responses of the vehicle and the beam ((a) the vehicle (b) middle span point of thebeam)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35
times106
Figure 3 Identified elemental prestress force (without noise)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35times106
Figure 4 Identified elemental prestress force (with 10 noise)
road surface roughness is assumed The maximum errors inidentified results for each speed are summarized in Table 2This table indicates that different vehicle speed has little effecton the identified results
Table 2 Identified results for different vehicle speed
Vehicle speed (ms)10 20 40
Max error () 002 002 002Iteration number 12 13 13120582optimal 123 times 10
minus9124 times 10
minus9124 times 10
minus9
Table 3 Identified results for different noise level
Measurement noise1 5 10
Max error () 165 224 411Iteration number 14 15 17120582optimal 563 times 10
minus9912 times 10
minus9104 times 10
minus8
Study Case 3 Effect of Different Measurement Noise Thesame three acceleration measurements as Study Case 1 con-taminated with different noise levels that is 1 5 and10 are studied The maximum errors in identified resultfor each noise level are listed in Table 3 From this tableone can find that the effect of measurement noise on theidentified results is not significant Even for 10 noise levelthe maximum identification error is 411 This indicates theidentified results are insensitive to the measurement noiseFigure 4 shows the identified results in which the noise levelis 10
32 A Prestressed Box-Girder Bridge A two-span prestressedbox-girder bridge is studied in this numerical example asshown in Figure 5(a) The dimension of the bridge is shownin Figure 5(a) Physical parameters of the bridge are Youngrsquosmodulus 119864 = 34times10
10 Pa mass density 120588 = 25times103 kgm3
The bridge is assumed to be jacked at both ends and themagnitude of the prestress force at the jack is assumed to be119879 = 4MN in the left rib and 119879 = 6MN in the right rib Thelayout of prestressing tendon is parabolicThe prestress loss is
Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
1015
10
02
Tendon at support
Tendon at midspan
2
15
Symmetric
zy
x
m1 z1
k1m2 c
z2k2
(a)
1 2 3 19 20
22 2321 4039middot middot middot
middot middot middot
(b)
4241 43 6059middot middot middot
(c)
Figure 1 (a) Vehicle models and the geometry of the simply supported Tee beam (dimension in meter) (b) Element number for the flangeof the Tee beam (c) Element number for the web of the Tee beam
Elemental stiffness matrix of the concrete bridge isexpressed as
119870119890= int
119860
(119861119901
119894)
119879
119863119901119861119901
119895119889119860 + int
119860
(119861119904
119894)119879119863119904119861119904
119895119889119860
+ int
119860
(119861119887
119894)
119879
119863119887119861119887
119895119889119860
+ int
119860
119866119879
119894[
119879119901
11990900
0 119879119901
1199100
]119866119895119889119860
(8)
where 119863119901 119863119904 and 119863
119887 are the material property matrices forplane stress shear stress and bending stress
119866119894 =[
[
119873119906
119894119909119873
V119894119909
119873119908
1198941199090 0 0
119873119906
119894119910119873
V119894119910
119873119908
1198941199100 0 0
]
]
(9)
119879119901
1199090and 119879
119901
1199100are the two components of the prestress force in
119909- and 119910-axis respectivelyAfter assembling the elemental stiffness and mass matri-
ces into systemmatrices the equation ofmotion of the bridgestructure can be written as
119872119887
119889 + 119862119887
119889 + 119870119887119889 = 119867119888119875int (10)
where119872119887 and119870119887 are the system mass and stiffness matricesrespectively119862119887 is the damping matrix in this study Rayleighdamping model is used that is 119862 = 1205721119872119887 + 1205722119870119887 where1205721 and 1205722 are two constants
119889 119889 and 119889 are the acceleration
velocity and displacement responses of the structure respec-tively 119875int is the interaction force between the bridge andthe vehicle 119867119888 is a matrix with zero entries except at theDOFs corresponding to the nodal displacements of the shellelements on which the load is acting
23 Equation of Motion for the Vehicle-5-Parameter VehicleModel The five-parameter vehicle model of the two degree-of-freedom system shown in Figure 1 comprises five compo-nents an upper mass119898V1 of the suspension a lowermass119898V2
of the bogie and axle connected to the suspension damper119888V and a suspension spring 119896V1 together with another spring119896V2 which is used to represent the stiffness of the tyre Theequations of motion of the masses 119898V1 and 119898V2 are
119898V11 + 119888V (1 minus 2) + 119896V1 (1199111 minus 1199112) = 0 (11)
119898V22 + 119888V (2 minus 1) + 119896V1 (1199112 minus 1199111)
+ 119896V2 (1199112 minus (119908 (119909 119910 119905) + 119903 (119909))) = 0
(12)
where 1 1 and 1199111 are the vertical acceleration velocity anddisplacement responses of the suspension mass of vehiclerespectively and 2 2 and 1199112 are the vertical accelerationvelocity and displacement responses of the bogie and axle119903(119909) is the road surface roughness at the location of thetyre [20] which will be given in the next subsection Itshould be pointed out that in (12) the additional velocityand acceleration due to road surface roughness may be takeninto account to determine the movement of the vehicle wheelas discussed by Chang et al [21] The interaction force 119875intbetween the bridge and the vehicle can be expressed as
119875int = (119898V1 + 119898V2) 119892 + 119896V2 (1199112 minus (119908 (119909 119910 119905) + 119903 (119909)))
= (119898V1 + 119898V2) 119892 minus 119898V11 minus 119898V22
(13)
4 Mathematical Problems in Engineering
Equations (10) (11) and (12) can be combined in acompact form and the coupled vehicle-bridge equations ofmotion can be written as
[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119889
1
2
+[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119889
1
2
+[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119889
1199111
1199112
=
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(14)
Let
119872119904 =[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119862119904 =[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119870119904 =[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119877119904 =
119889
1199111
1199112
119875 (119905) =
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(15)
Equation (14) can be rewritten as
119872119904119904 + 119862119904119904 + 119870119904119877119904 = 119875 (119905) (16)
The dynamic responses of the bridge and vehicle can beobtained from a step-by-step solution using the state spacemethod [22]
24 Road Surface Roughness The randomness of the roadsurface roughness of the bridge can be represented with aperiodic modulated random process It is specified by itspower spectral density function (PSD) as [23]
119878119903 (120596119904) = 119860119903(120596119904
1205961199040
)
minus2
(17)
where119860119903 is the roughness coefficient inm2cyclem120596119904 is thespatial frequency in cyclem120596119904 is the discontinuity frequencyequal to 12120587 (cyclem)
The road surface roughness function 119903(119909) can be gener-ated from (17) using the FFT algorithm [23] which is givenby
119903 (119909) =
119873
sum
119894=1
(4119860119903(2120587119894
1198711198881205961199040
)
minus22120587
119871119888
)
12
cos (120596119904119894119909 minus 120579119894) (18)
where 120596119904119894 = 119894Δ120596119904 with Δ120596119904 = 2120587119871119888 in which 119871119888 is twicethe length of the bridge 120579119894 is a random number distributeduniformly between 0 and 2120587
25 Dynamic Response Sensitivity with Respect to PrestressForce Differentiating both sides of (16) with respect to theprestress force of the 119894th element we have
119872119904
120597119904
120597119879119894
+ 119862119904
120597119904
120597119879119894
+ 119870119904
120597119877119904
120597119879119894
+ 1205722
120597119870119904
120597119879119894
119877119904 +120597119870119904
120597119879119894
119877119904 = 0 (19)
Let 119863 = 120597119877119904120597119879119894 = 120597119904120597119879119894 and = 120597119904120597119879119894 sincethe global matrix 119870119904 is the function of the prestress force 119879the partial derivative 120597119870119904120597119879119894 can be obtained directly Thefourth and fifth terms in (19) on the left-hand side can beremoved to the right-hand side as the ldquoinput forcerdquo Equation(19) can be rewritten as
119872119904 + 119862119904 + 119870119904119863 = minus1205722
120597119870119904
120597119879119894
119904 minus120597119870119904
120597119879119894
119877119904(20)
Similarly the dynamic response sensitivities 119863 can beobtained from (20)
26 Identification of Prestress Force from Measured DynamicResponse The identification problem is to find the vector ofprestress force 119879 such that the calculated responses 119877119904 bestmatch the measured responses that is
[119876] 119877119904 = (21)
where the selection matrix [119876] is a constant matrix withelements of zeros or ones whichmaps the degrees of freedomof the system to the measured degrees of freedom 119877119904 and are the vectors of calculated and measured dynamicresponses of the system respectively The inverse problem isto minimize the error between the calculated and measuredresponses as
120575119877 = minus [119876] 119877119904 = minus 119877cal (22)
Aswe have no idea of themagnitude of the prestress forcethe initial value for the elemental prestress force is set as anull vector The corresponding response 119877
0
119904and the response
sensitivity matrix 1198780 are obtained from (16) and (20) with
superscript ldquo0rdquo denoting the initial set of valuesAt the 119895th iteration the difference between the measured
and calculated system responses can be expressed as
Δ119877119895= minus 119877
119895
cal (119895 = 0 1 2 ) (23)
Using the penalty function method [24] the vector ofthe prestress force increment Δ119879
119895 can be obtained from thefollowing equation
[119878
119895] Δ119879
119895 = Δ119877
119895 (24)
Mathematical Problems in Engineering 5
where [119878
119895] is a 119899119905 times 119873 matrix selected from the sensitivity
matrix [119878119895] 119873 is the number of unknown of prestress force
119899119905 is the number of measured data points It is noted that 119899119905should be greater than 119873 to make sure that the equation isover-determined Equation (24) can be solved by the dampedleast-squares method [25] with bounds to the solution
Δ119879119895 = ([119878
119895]
119879
[119878
119895] + 120582119868)
minus1
[119878
119895]
119879
Δ119877119895 (25)
where 120582 is the nonnegative damping (regularization) coeffi-cient governing the participation of least-squares error in thesolution The solution of (24) is equivalent to minimize thefunction
119869 (Δ119879119894 120582) =
100381710038171003817100381710038171003817
[119878
119895] Δ119877
119895 minus Δ119879
119895
100381710038171003817100381710038171003817
2
+ 120582
10038171003817100381710038171003817Δ119879119895
10038171003817100381710038171003817
2 (26)
with the second term in (26) providing bounds to thesolution When the parameter 120582 approaches to zero theestimated vector Δ119879
119895 approaches to the solution obtained
from the simple least-squares methodThe updated prestress force 119879
119895+1 = 119879
119895 + Δ119879
119895 (119895 =
0 1 2 ) is calculated in the next iteration and the dynamicresponse 119877
119895+1 and response sensitivity 119878119895+1 are also recal-
culated The convergence is considered achieved when thefollowing criterion is met
10038171003817100381710038171003817119879119896+1
minus 119879119896
10038171003817100381710038171003817
10038171003817100381710038171198791198961003817100381710038171003817
le tolerance (27)
where 119896 denotes the 119896th iteration The tolerance is taken as1 times 10
minus7 in this studyThe relative error in identified results in each element is
defined as
RE =
(119879119894)identified minus (119879119894)true(119879119894)true
times 100 (119894 = 1 2 119873)
(28)
3 Numerical Simulations
31 APrestressedTee Beam TheprestressedTee beam studiedby Figueiras and Povoas [26] was used as the first numericalexample in this paper The beam is simply supported andprestressed with a parabolic tendon The geometry of thebeam is shown in Figure 1(a) The mechanical properties ofthe concrete are Youngrsquos modulus 119864119888 = 34 times 10
10 Pa massdensity 120588119888 = 2800 kgm3 and Poisson ratio 120592 = 018 Themechanical properties of the prestressing tendon are Youngrsquosmodulus 119864119901 = 210GPa mass density 120588119901 = 7800 kgm3 Themagnitude of the prestress force is 3MN and the prestressingtendon is assumed to be perfectly bonded and no prestressloss is taken into account
In the finite element of the beam the flange is discretizedinto two 4-node isoparametric flat shell elements in the trans-verse direction and 20 elements in the longitudinal directionThe web is discretized into 20 elements in the longitudinaldirection Figures 1(b) and 1(c) show the finite element
Table 1 Identified results for different road surface roughness
Road surface roughnessClass A Class B Class C Class D
Max error () 001 002 002 005Iteration number 12 12 13 18120582optimal 121 times 10
minus9123 times 10
minus9130 times 10
minus9149 times 10
minus9
number sequence of Tee beam From the free vibrationanalysis the first nine natural frequencies of the prestressedbeam are 630 7441 8268 21545 21923 24243 3507536847 and 47075Hz respectively The modal damping ratiois taken as 001 for the first two modes to obtain the twocoefficients in Rayleigh damping
The parameters of the five-parameter vehicle model are119898V1 = 36 times 10
3 kg 119898V2 = 025 times 103 kg 119888V = 10 times 10
3Nsm119896V1 = 60 times 10
5Nm and 119896V2 = 85 times 105Nm The
traveling speed of the vehicle is assumed to be 20ms ClassesA to D road surface roughness is included Figure 2 givesa comparison on the displacement responses of the vehicleand that at the middle point of the flange for different roadroughness coefficients From this figure one can find thatthe road roughness coefficient has significant effect on theresponses for both the bridge and the vehicle
To simulate the effect of measurement noise a normallydistributed random error with zeromean and a unit standarddeviation is added to the calculated acceleration as
119877 = cal + 119864119901 times 119873oise times var (cal) (29)
where 119877 is the vectors of measured structural acceleration
response 119864119901 is the noise level119873oise is a standard normal dis-tribution vector with zero mean and unit standard deviationvar(cal) is the variance of the time history
Study Case 1 Effect of Different Road Surface RoughnessIn this case we make use of the noise-free accelerationresponse of the bridge induced by the vehicle passing on topof the bridge at a speed of 10ms to identify the prestressforce with different road surface roughness The samplingrate is 100Hz which is high enough to include the firstnine frequencies of the bridge and the measurement timeduration is 2 seconds in the identificationThree accelerationmeasurements located at 1198714 1198712 and 31198714 of the bridgeat the bottom of the web are used for the prestress forceidentification The maximum errors in identified result foreach road surface roughness are listed in Table 1 One can findthe prestress force in each element has been identified withvery high accuracy for each road surface roughness Figure 3shows the identified results for road roughness Class B
Study Case 2 Effect of Different Vehicle Speed Three differentvehicle speeds are studied that is 10ms 20ms and 40msand the corresponding measurement time duration is 2seconds The sampling rate is 100Hz The same vehicle andmeasurement locations as Study Case 1 are used Class B
6 Mathematical Problems in Engineering
0
001
002
003
004
Time (s)
Disp
lace
men
t (m
)
0 01 02 03 04 05 06 07 08 09 1minus001
Class B Class A
Class C Class D
(a)
02
Class B Class A
Class C Class D
Time (s)0 01 02 03 04 05 06 07 08 09 1
minus2
minus4
minus6
minus8
minus10
minus12
times10minus4
Disp
lace
men
t (m
)
(b)
Figure 2 Effect of road roughness on the displacement responses of the vehicle and the beam ((a) the vehicle (b) middle span point of thebeam)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35
times106
Figure 3 Identified elemental prestress force (without noise)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35times106
Figure 4 Identified elemental prestress force (with 10 noise)
road surface roughness is assumed The maximum errors inidentified results for each speed are summarized in Table 2This table indicates that different vehicle speed has little effecton the identified results
Table 2 Identified results for different vehicle speed
Vehicle speed (ms)10 20 40
Max error () 002 002 002Iteration number 12 13 13120582optimal 123 times 10
minus9124 times 10
minus9124 times 10
minus9
Table 3 Identified results for different noise level
Measurement noise1 5 10
Max error () 165 224 411Iteration number 14 15 17120582optimal 563 times 10
minus9912 times 10
minus9104 times 10
minus8
Study Case 3 Effect of Different Measurement Noise Thesame three acceleration measurements as Study Case 1 con-taminated with different noise levels that is 1 5 and10 are studied The maximum errors in identified resultfor each noise level are listed in Table 3 From this tableone can find that the effect of measurement noise on theidentified results is not significant Even for 10 noise levelthe maximum identification error is 411 This indicates theidentified results are insensitive to the measurement noiseFigure 4 shows the identified results in which the noise levelis 10
32 A Prestressed Box-Girder Bridge A two-span prestressedbox-girder bridge is studied in this numerical example asshown in Figure 5(a) The dimension of the bridge is shownin Figure 5(a) Physical parameters of the bridge are Youngrsquosmodulus 119864 = 34times10
10 Pa mass density 120588 = 25times103 kgm3
The bridge is assumed to be jacked at both ends and themagnitude of the prestress force at the jack is assumed to be119879 = 4MN in the left rib and 119879 = 6MN in the right rib Thelayout of prestressing tendon is parabolicThe prestress loss is
Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Equations (10) (11) and (12) can be combined in acompact form and the coupled vehicle-bridge equations ofmotion can be written as
[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119889
1
2
+[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119889
1
2
+[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119889
1199111
1199112
=
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(14)
Let
119872119904 =[
[
119872119887 119867119888119898V1 119867119888119898V20 119898V1 0
0 0 119898V2
]
]
119862119904 =[
[
119862119887 0 0
0 119888V 0
0 0 119888V
]
]
119870119904 =[
[
119870119887 0 0
0 119896V1 minus119896V1
minus119867119879
119888119896V2 minus119896V1 119896V1 + 119896V2
]
]
119877119904 =
119889
1199111
1199112
119875 (119905) =
119867119888 (119898V1 + 119898V2) 119892
0
119896V2119903 (119909)
(15)
Equation (14) can be rewritten as
119872119904119904 + 119862119904119904 + 119870119904119877119904 = 119875 (119905) (16)
The dynamic responses of the bridge and vehicle can beobtained from a step-by-step solution using the state spacemethod [22]
24 Road Surface Roughness The randomness of the roadsurface roughness of the bridge can be represented with aperiodic modulated random process It is specified by itspower spectral density function (PSD) as [23]
119878119903 (120596119904) = 119860119903(120596119904
1205961199040
)
minus2
(17)
where119860119903 is the roughness coefficient inm2cyclem120596119904 is thespatial frequency in cyclem120596119904 is the discontinuity frequencyequal to 12120587 (cyclem)
The road surface roughness function 119903(119909) can be gener-ated from (17) using the FFT algorithm [23] which is givenby
119903 (119909) =
119873
sum
119894=1
(4119860119903(2120587119894
1198711198881205961199040
)
minus22120587
119871119888
)
12
cos (120596119904119894119909 minus 120579119894) (18)
where 120596119904119894 = 119894Δ120596119904 with Δ120596119904 = 2120587119871119888 in which 119871119888 is twicethe length of the bridge 120579119894 is a random number distributeduniformly between 0 and 2120587
25 Dynamic Response Sensitivity with Respect to PrestressForce Differentiating both sides of (16) with respect to theprestress force of the 119894th element we have
119872119904
120597119904
120597119879119894
+ 119862119904
120597119904
120597119879119894
+ 119870119904
120597119877119904
120597119879119894
+ 1205722
120597119870119904
120597119879119894
119877119904 +120597119870119904
120597119879119894
119877119904 = 0 (19)
Let 119863 = 120597119877119904120597119879119894 = 120597119904120597119879119894 and = 120597119904120597119879119894 sincethe global matrix 119870119904 is the function of the prestress force 119879the partial derivative 120597119870119904120597119879119894 can be obtained directly Thefourth and fifth terms in (19) on the left-hand side can beremoved to the right-hand side as the ldquoinput forcerdquo Equation(19) can be rewritten as
119872119904 + 119862119904 + 119870119904119863 = minus1205722
120597119870119904
120597119879119894
119904 minus120597119870119904
120597119879119894
119877119904(20)
Similarly the dynamic response sensitivities 119863 can beobtained from (20)
26 Identification of Prestress Force from Measured DynamicResponse The identification problem is to find the vector ofprestress force 119879 such that the calculated responses 119877119904 bestmatch the measured responses that is
[119876] 119877119904 = (21)
where the selection matrix [119876] is a constant matrix withelements of zeros or ones whichmaps the degrees of freedomof the system to the measured degrees of freedom 119877119904 and are the vectors of calculated and measured dynamicresponses of the system respectively The inverse problem isto minimize the error between the calculated and measuredresponses as
120575119877 = minus [119876] 119877119904 = minus 119877cal (22)
Aswe have no idea of themagnitude of the prestress forcethe initial value for the elemental prestress force is set as anull vector The corresponding response 119877
0
119904and the response
sensitivity matrix 1198780 are obtained from (16) and (20) with
superscript ldquo0rdquo denoting the initial set of valuesAt the 119895th iteration the difference between the measured
and calculated system responses can be expressed as
Δ119877119895= minus 119877
119895
cal (119895 = 0 1 2 ) (23)
Using the penalty function method [24] the vector ofthe prestress force increment Δ119879
119895 can be obtained from thefollowing equation
[119878
119895] Δ119879
119895 = Δ119877
119895 (24)
Mathematical Problems in Engineering 5
where [119878
119895] is a 119899119905 times 119873 matrix selected from the sensitivity
matrix [119878119895] 119873 is the number of unknown of prestress force
119899119905 is the number of measured data points It is noted that 119899119905should be greater than 119873 to make sure that the equation isover-determined Equation (24) can be solved by the dampedleast-squares method [25] with bounds to the solution
Δ119879119895 = ([119878
119895]
119879
[119878
119895] + 120582119868)
minus1
[119878
119895]
119879
Δ119877119895 (25)
where 120582 is the nonnegative damping (regularization) coeffi-cient governing the participation of least-squares error in thesolution The solution of (24) is equivalent to minimize thefunction
119869 (Δ119879119894 120582) =
100381710038171003817100381710038171003817
[119878
119895] Δ119877
119895 minus Δ119879
119895
100381710038171003817100381710038171003817
2
+ 120582
10038171003817100381710038171003817Δ119879119895
10038171003817100381710038171003817
2 (26)
with the second term in (26) providing bounds to thesolution When the parameter 120582 approaches to zero theestimated vector Δ119879
119895 approaches to the solution obtained
from the simple least-squares methodThe updated prestress force 119879
119895+1 = 119879
119895 + Δ119879
119895 (119895 =
0 1 2 ) is calculated in the next iteration and the dynamicresponse 119877
119895+1 and response sensitivity 119878119895+1 are also recal-
culated The convergence is considered achieved when thefollowing criterion is met
10038171003817100381710038171003817119879119896+1
minus 119879119896
10038171003817100381710038171003817
10038171003817100381710038171198791198961003817100381710038171003817
le tolerance (27)
where 119896 denotes the 119896th iteration The tolerance is taken as1 times 10
minus7 in this studyThe relative error in identified results in each element is
defined as
RE =
(119879119894)identified minus (119879119894)true(119879119894)true
times 100 (119894 = 1 2 119873)
(28)
3 Numerical Simulations
31 APrestressedTee Beam TheprestressedTee beam studiedby Figueiras and Povoas [26] was used as the first numericalexample in this paper The beam is simply supported andprestressed with a parabolic tendon The geometry of thebeam is shown in Figure 1(a) The mechanical properties ofthe concrete are Youngrsquos modulus 119864119888 = 34 times 10
10 Pa massdensity 120588119888 = 2800 kgm3 and Poisson ratio 120592 = 018 Themechanical properties of the prestressing tendon are Youngrsquosmodulus 119864119901 = 210GPa mass density 120588119901 = 7800 kgm3 Themagnitude of the prestress force is 3MN and the prestressingtendon is assumed to be perfectly bonded and no prestressloss is taken into account
In the finite element of the beam the flange is discretizedinto two 4-node isoparametric flat shell elements in the trans-verse direction and 20 elements in the longitudinal directionThe web is discretized into 20 elements in the longitudinaldirection Figures 1(b) and 1(c) show the finite element
Table 1 Identified results for different road surface roughness
Road surface roughnessClass A Class B Class C Class D
Max error () 001 002 002 005Iteration number 12 12 13 18120582optimal 121 times 10
minus9123 times 10
minus9130 times 10
minus9149 times 10
minus9
number sequence of Tee beam From the free vibrationanalysis the first nine natural frequencies of the prestressedbeam are 630 7441 8268 21545 21923 24243 3507536847 and 47075Hz respectively The modal damping ratiois taken as 001 for the first two modes to obtain the twocoefficients in Rayleigh damping
The parameters of the five-parameter vehicle model are119898V1 = 36 times 10
3 kg 119898V2 = 025 times 103 kg 119888V = 10 times 10
3Nsm119896V1 = 60 times 10
5Nm and 119896V2 = 85 times 105Nm The
traveling speed of the vehicle is assumed to be 20ms ClassesA to D road surface roughness is included Figure 2 givesa comparison on the displacement responses of the vehicleand that at the middle point of the flange for different roadroughness coefficients From this figure one can find thatthe road roughness coefficient has significant effect on theresponses for both the bridge and the vehicle
To simulate the effect of measurement noise a normallydistributed random error with zeromean and a unit standarddeviation is added to the calculated acceleration as
119877 = cal + 119864119901 times 119873oise times var (cal) (29)
where 119877 is the vectors of measured structural acceleration
response 119864119901 is the noise level119873oise is a standard normal dis-tribution vector with zero mean and unit standard deviationvar(cal) is the variance of the time history
Study Case 1 Effect of Different Road Surface RoughnessIn this case we make use of the noise-free accelerationresponse of the bridge induced by the vehicle passing on topof the bridge at a speed of 10ms to identify the prestressforce with different road surface roughness The samplingrate is 100Hz which is high enough to include the firstnine frequencies of the bridge and the measurement timeduration is 2 seconds in the identificationThree accelerationmeasurements located at 1198714 1198712 and 31198714 of the bridgeat the bottom of the web are used for the prestress forceidentification The maximum errors in identified result foreach road surface roughness are listed in Table 1 One can findthe prestress force in each element has been identified withvery high accuracy for each road surface roughness Figure 3shows the identified results for road roughness Class B
Study Case 2 Effect of Different Vehicle Speed Three differentvehicle speeds are studied that is 10ms 20ms and 40msand the corresponding measurement time duration is 2seconds The sampling rate is 100Hz The same vehicle andmeasurement locations as Study Case 1 are used Class B
6 Mathematical Problems in Engineering
0
001
002
003
004
Time (s)
Disp
lace
men
t (m
)
0 01 02 03 04 05 06 07 08 09 1minus001
Class B Class A
Class C Class D
(a)
02
Class B Class A
Class C Class D
Time (s)0 01 02 03 04 05 06 07 08 09 1
minus2
minus4
minus6
minus8
minus10
minus12
times10minus4
Disp
lace
men
t (m
)
(b)
Figure 2 Effect of road roughness on the displacement responses of the vehicle and the beam ((a) the vehicle (b) middle span point of thebeam)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35
times106
Figure 3 Identified elemental prestress force (without noise)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35times106
Figure 4 Identified elemental prestress force (with 10 noise)
road surface roughness is assumed The maximum errors inidentified results for each speed are summarized in Table 2This table indicates that different vehicle speed has little effecton the identified results
Table 2 Identified results for different vehicle speed
Vehicle speed (ms)10 20 40
Max error () 002 002 002Iteration number 12 13 13120582optimal 123 times 10
minus9124 times 10
minus9124 times 10
minus9
Table 3 Identified results for different noise level
Measurement noise1 5 10
Max error () 165 224 411Iteration number 14 15 17120582optimal 563 times 10
minus9912 times 10
minus9104 times 10
minus8
Study Case 3 Effect of Different Measurement Noise Thesame three acceleration measurements as Study Case 1 con-taminated with different noise levels that is 1 5 and10 are studied The maximum errors in identified resultfor each noise level are listed in Table 3 From this tableone can find that the effect of measurement noise on theidentified results is not significant Even for 10 noise levelthe maximum identification error is 411 This indicates theidentified results are insensitive to the measurement noiseFigure 4 shows the identified results in which the noise levelis 10
32 A Prestressed Box-Girder Bridge A two-span prestressedbox-girder bridge is studied in this numerical example asshown in Figure 5(a) The dimension of the bridge is shownin Figure 5(a) Physical parameters of the bridge are Youngrsquosmodulus 119864 = 34times10
10 Pa mass density 120588 = 25times103 kgm3
The bridge is assumed to be jacked at both ends and themagnitude of the prestress force at the jack is assumed to be119879 = 4MN in the left rib and 119879 = 6MN in the right rib Thelayout of prestressing tendon is parabolicThe prestress loss is
Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
where [119878
119895] is a 119899119905 times 119873 matrix selected from the sensitivity
matrix [119878119895] 119873 is the number of unknown of prestress force
119899119905 is the number of measured data points It is noted that 119899119905should be greater than 119873 to make sure that the equation isover-determined Equation (24) can be solved by the dampedleast-squares method [25] with bounds to the solution
Δ119879119895 = ([119878
119895]
119879
[119878
119895] + 120582119868)
minus1
[119878
119895]
119879
Δ119877119895 (25)
where 120582 is the nonnegative damping (regularization) coeffi-cient governing the participation of least-squares error in thesolution The solution of (24) is equivalent to minimize thefunction
119869 (Δ119879119894 120582) =
100381710038171003817100381710038171003817
[119878
119895] Δ119877
119895 minus Δ119879
119895
100381710038171003817100381710038171003817
2
+ 120582
10038171003817100381710038171003817Δ119879119895
10038171003817100381710038171003817
2 (26)
with the second term in (26) providing bounds to thesolution When the parameter 120582 approaches to zero theestimated vector Δ119879
119895 approaches to the solution obtained
from the simple least-squares methodThe updated prestress force 119879
119895+1 = 119879
119895 + Δ119879
119895 (119895 =
0 1 2 ) is calculated in the next iteration and the dynamicresponse 119877
119895+1 and response sensitivity 119878119895+1 are also recal-
culated The convergence is considered achieved when thefollowing criterion is met
10038171003817100381710038171003817119879119896+1
minus 119879119896
10038171003817100381710038171003817
10038171003817100381710038171198791198961003817100381710038171003817
le tolerance (27)
where 119896 denotes the 119896th iteration The tolerance is taken as1 times 10
minus7 in this studyThe relative error in identified results in each element is
defined as
RE =
(119879119894)identified minus (119879119894)true(119879119894)true
times 100 (119894 = 1 2 119873)
(28)
3 Numerical Simulations
31 APrestressedTee Beam TheprestressedTee beam studiedby Figueiras and Povoas [26] was used as the first numericalexample in this paper The beam is simply supported andprestressed with a parabolic tendon The geometry of thebeam is shown in Figure 1(a) The mechanical properties ofthe concrete are Youngrsquos modulus 119864119888 = 34 times 10
10 Pa massdensity 120588119888 = 2800 kgm3 and Poisson ratio 120592 = 018 Themechanical properties of the prestressing tendon are Youngrsquosmodulus 119864119901 = 210GPa mass density 120588119901 = 7800 kgm3 Themagnitude of the prestress force is 3MN and the prestressingtendon is assumed to be perfectly bonded and no prestressloss is taken into account
In the finite element of the beam the flange is discretizedinto two 4-node isoparametric flat shell elements in the trans-verse direction and 20 elements in the longitudinal directionThe web is discretized into 20 elements in the longitudinaldirection Figures 1(b) and 1(c) show the finite element
Table 1 Identified results for different road surface roughness
Road surface roughnessClass A Class B Class C Class D
Max error () 001 002 002 005Iteration number 12 12 13 18120582optimal 121 times 10
minus9123 times 10
minus9130 times 10
minus9149 times 10
minus9
number sequence of Tee beam From the free vibrationanalysis the first nine natural frequencies of the prestressedbeam are 630 7441 8268 21545 21923 24243 3507536847 and 47075Hz respectively The modal damping ratiois taken as 001 for the first two modes to obtain the twocoefficients in Rayleigh damping
The parameters of the five-parameter vehicle model are119898V1 = 36 times 10
3 kg 119898V2 = 025 times 103 kg 119888V = 10 times 10
3Nsm119896V1 = 60 times 10
5Nm and 119896V2 = 85 times 105Nm The
traveling speed of the vehicle is assumed to be 20ms ClassesA to D road surface roughness is included Figure 2 givesa comparison on the displacement responses of the vehicleand that at the middle point of the flange for different roadroughness coefficients From this figure one can find thatthe road roughness coefficient has significant effect on theresponses for both the bridge and the vehicle
To simulate the effect of measurement noise a normallydistributed random error with zeromean and a unit standarddeviation is added to the calculated acceleration as
119877 = cal + 119864119901 times 119873oise times var (cal) (29)
where 119877 is the vectors of measured structural acceleration
response 119864119901 is the noise level119873oise is a standard normal dis-tribution vector with zero mean and unit standard deviationvar(cal) is the variance of the time history
Study Case 1 Effect of Different Road Surface RoughnessIn this case we make use of the noise-free accelerationresponse of the bridge induced by the vehicle passing on topof the bridge at a speed of 10ms to identify the prestressforce with different road surface roughness The samplingrate is 100Hz which is high enough to include the firstnine frequencies of the bridge and the measurement timeduration is 2 seconds in the identificationThree accelerationmeasurements located at 1198714 1198712 and 31198714 of the bridgeat the bottom of the web are used for the prestress forceidentification The maximum errors in identified result foreach road surface roughness are listed in Table 1 One can findthe prestress force in each element has been identified withvery high accuracy for each road surface roughness Figure 3shows the identified results for road roughness Class B
Study Case 2 Effect of Different Vehicle Speed Three differentvehicle speeds are studied that is 10ms 20ms and 40msand the corresponding measurement time duration is 2seconds The sampling rate is 100Hz The same vehicle andmeasurement locations as Study Case 1 are used Class B
6 Mathematical Problems in Engineering
0
001
002
003
004
Time (s)
Disp
lace
men
t (m
)
0 01 02 03 04 05 06 07 08 09 1minus001
Class B Class A
Class C Class D
(a)
02
Class B Class A
Class C Class D
Time (s)0 01 02 03 04 05 06 07 08 09 1
minus2
minus4
minus6
minus8
minus10
minus12
times10minus4
Disp
lace
men
t (m
)
(b)
Figure 2 Effect of road roughness on the displacement responses of the vehicle and the beam ((a) the vehicle (b) middle span point of thebeam)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35
times106
Figure 3 Identified elemental prestress force (without noise)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35times106
Figure 4 Identified elemental prestress force (with 10 noise)
road surface roughness is assumed The maximum errors inidentified results for each speed are summarized in Table 2This table indicates that different vehicle speed has little effecton the identified results
Table 2 Identified results for different vehicle speed
Vehicle speed (ms)10 20 40
Max error () 002 002 002Iteration number 12 13 13120582optimal 123 times 10
minus9124 times 10
minus9124 times 10
minus9
Table 3 Identified results for different noise level
Measurement noise1 5 10
Max error () 165 224 411Iteration number 14 15 17120582optimal 563 times 10
minus9912 times 10
minus9104 times 10
minus8
Study Case 3 Effect of Different Measurement Noise Thesame three acceleration measurements as Study Case 1 con-taminated with different noise levels that is 1 5 and10 are studied The maximum errors in identified resultfor each noise level are listed in Table 3 From this tableone can find that the effect of measurement noise on theidentified results is not significant Even for 10 noise levelthe maximum identification error is 411 This indicates theidentified results are insensitive to the measurement noiseFigure 4 shows the identified results in which the noise levelis 10
32 A Prestressed Box-Girder Bridge A two-span prestressedbox-girder bridge is studied in this numerical example asshown in Figure 5(a) The dimension of the bridge is shownin Figure 5(a) Physical parameters of the bridge are Youngrsquosmodulus 119864 = 34times10
10 Pa mass density 120588 = 25times103 kgm3
The bridge is assumed to be jacked at both ends and themagnitude of the prestress force at the jack is assumed to be119879 = 4MN in the left rib and 119879 = 6MN in the right rib Thelayout of prestressing tendon is parabolicThe prestress loss is
Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
0
001
002
003
004
Time (s)
Disp
lace
men
t (m
)
0 01 02 03 04 05 06 07 08 09 1minus001
Class B Class A
Class C Class D
(a)
02
Class B Class A
Class C Class D
Time (s)0 01 02 03 04 05 06 07 08 09 1
minus2
minus4
minus6
minus8
minus10
minus12
times10minus4
Disp
lace
men
t (m
)
(b)
Figure 2 Effect of road roughness on the displacement responses of the vehicle and the beam ((a) the vehicle (b) middle span point of thebeam)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35
times106
Figure 3 Identified elemental prestress force (without noise)
40 42 44 46 48 50 52 54 56 58 60Element number
Pres
tress
forc
e (N
)
0
05
1
15
2
25
3
35times106
Figure 4 Identified elemental prestress force (with 10 noise)
road surface roughness is assumed The maximum errors inidentified results for each speed are summarized in Table 2This table indicates that different vehicle speed has little effecton the identified results
Table 2 Identified results for different vehicle speed
Vehicle speed (ms)10 20 40
Max error () 002 002 002Iteration number 12 13 13120582optimal 123 times 10
minus9124 times 10
minus9124 times 10
minus9
Table 3 Identified results for different noise level
Measurement noise1 5 10
Max error () 165 224 411Iteration number 14 15 17120582optimal 563 times 10
minus9912 times 10
minus9104 times 10
minus8
Study Case 3 Effect of Different Measurement Noise Thesame three acceleration measurements as Study Case 1 con-taminated with different noise levels that is 1 5 and10 are studied The maximum errors in identified resultfor each noise level are listed in Table 3 From this tableone can find that the effect of measurement noise on theidentified results is not significant Even for 10 noise levelthe maximum identification error is 411 This indicates theidentified results are insensitive to the measurement noiseFigure 4 shows the identified results in which the noise levelis 10
32 A Prestressed Box-Girder Bridge A two-span prestressedbox-girder bridge is studied in this numerical example asshown in Figure 5(a) The dimension of the bridge is shownin Figure 5(a) Physical parameters of the bridge are Youngrsquosmodulus 119864 = 34times10
10 Pa mass density 120588 = 25times103 kgm3
The bridge is assumed to be jacked at both ends and themagnitude of the prestress force at the jack is assumed to be119879 = 4MN in the left rib and 119879 = 6MN in the right rib Thelayout of prestressing tendon is parabolicThe prestress loss is
Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
40
45
45
15
15 03A
A
B
B
C
C
Constrains at section A-A Constrains at section B-B Constrains at section C-C
D
D
E
E
02
1
M1
M2
M3
M4
M5
M6
Tendon at sectionA-A B-B C-C
Tendon at sectionD-D E-E
z y
xM1ndashM6 measurements
(a)
21 22 23 39 40
42 4341 6059
1 2 3 19 20
middot middot middot
middot middot middot
(b)
6261 63 8079middot middot middot
(c)
8281 83 10099middot middot middot
(d)
102101 103 120119middot middot middot
(e)
Figure 5 (a) Two-span prestressed box-girder bridge (dimension inmeter) (b) Element number for the upper plate of the box-girder bridge(c) Element number for the lower plate of the box-girder bridge (d) Element number for the left rib of the box-girder bridge (e) Elementnumber for the right rib of the box-girder bridge
taken into account Table 4 shows the prestress force in eachof the 20 elements in the rib
In the finite element of the bridge the upper plate ofbridge is discretized into three 4-node isoparametric flatshell elements in the transverse direction and 20 elements inthe longitudinal direction The bottom plate of the bridge isdiscretized into 1 element in the transverse direction and 20elements in the longitudinal direction The rib is discretizedinto 20 elements in the longitudinal direction Figures 5(b)ndash5(e) show the finite element number sequence of the bridgeThe first ten natural frequencies of the prestressed beamare 7942 11510 13369 17086 18773 23529 23604 2942733345 and 34134Hz respectively The modal damping ratiois taken as 001 for the first two modes to calculate the twocoefficients in Rayleigh damping
Study Case 4 Identification of Different Distributions ofPrestress Force The traveling speed of the vehicle is 20ms
which moves in the global 119910 direction on the top of theleft rib The sampling rate is 100Hz Class B road surface isadopted Six acceleration measurements M1ndashM6 as shownin Figure 5(a) are used for prestress force identificationThe identified results converge to the true values after 15iterations with amaximum relative identified error of 0008at element 91 The optimal regularization parameter 120582opt isfound to be 224times10
minus12 Figure 6 shows the identified results
Study Case 5 Effect of Measurement Noise The effect ofmeasurement noise on the identified results is studied Case5 is restudied but it is assumed the ldquomeasuredrdquo accelerationresponses are contaminated with noise Ten percent noiselevel is studied The identified results converged after 27 iter-ations as shown in Figure 7 with a maximum identified error358 at element 92 The optimal regularization parameter120582opt is found to be 328 times 10
minus12
8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Table 4 Magnitude of prestress force in each element
Element number Prestress (MN)81 4082 38883 37684 36485 35286 34087 32888 31289 29690 2891 2892 29693 31294 32895 34096 35297 36498 37699 388100 40101 60102 582103 564104 546105 528106 510107 492108 468109 444110 420111 420112 444113 468114 492115 510116 528117 546118 564119 582120 60
4 Conclusions
An approach making use of the dynamic responses of thebridge under moving vehicular load is proposed to identifythe prestress force in the bridge Four-node isoparametricflat shell element with the transverse shearing deformationis used to model the prestressed bridges And the equationof motion of the bridge-vehicle system is established Theprestress forces are identified iteratively from a dynamicresponse sensitivity analysis based model updating using the
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 6 Identification of distributed prestress force in box-girderbridge (noise free)
80 82 84 86 88 90 92 94 96 98 1000
1
2
3
4
5
Element number
Pres
tress
forc
e (N
)
100 102 104 106 108 110 112 114 116 118 1200
2
4
6
8
Pres
tress
forc
e (N
)
Element number
times106
times106
Figure 7 Identification of distributed prestress force in box-girderbridge (10 noise)
measured dynamic responses of the bridge Two numericalsimulations indicate that the proposed method is correct andefficient for prestress force identification Study shows thatthe speed of the moving vehicle has little effect on the iden-tified results Studies also show that artificial measurementnoise does not have significant effect on the identified resultsbut larger identified error is observed under a weak roadcondition
Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Acknowledgments
This work is supported by the National Natural ScienceFoundation of China (11172333 11272361) the FundamentalResearch Funds for the Central Universities (13lgzd06) andthe General Financial Grant from the China PostdoctoralScience Foundation (2013M531893) Such financial aids aregratefully acknowledged
References
[1] J E Akin and M Mofid ldquoNumerical solution for response ofbeamswithmovingmassrdquo Journal of Structural Engineering vol115 no 1 pp 120ndash131 1989
[2] E S Hwang and A S Nowak ldquoSimulation of dynamic load forbridgesrdquo Journal of Structural Engineering vol 117 no 5 pp1413ndash1434 1991
[3] Y B Yang and B H Lin ldquoVehicle-bridge interaction analysis bydynamic condensation methodrdquo Journal of Structural Engineer-ing vol 121 no 11 pp 1636ndash1643 1995
[4] Y B Yang and J D Yau ldquoVehicle-bridge interaction element fordynamic analysisrdquo Journal of Structural Engineering vol 123 no11 pp 1512ndash1518 1997
[5] S S Law and X Q Zhu ldquoBridge dynamic responses due to roadsurface roughness and braking of vehiclerdquo Journal of Sound andVibration vol 282 no 3ndash5 pp 805ndash830 2005
[6] L T Stavridis ldquoA simplified analysis of the behavior of sus-pension bridges under live loadrdquo Structural Engineering andMechanics vol 30 no 5 pp 559ndash576 2008
[7] J D Yau ldquoVehiclebridge interactions of a rail suspension bridgeconsidering support movementsrdquo Interaction and MultiscaleMechanics vol 2 no 3 pp 35ndash48 2009
[8] K C Chang F B Wu and Y B Yang ldquoEffect of roadsurface roughness on indirect approach for measuring bridgefrequencies from a passing vehiclerdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 1ndash16 2010
[9] S Q Wang H Xia W W Guo and N Zhang ldquoNonlineardynamic response analysis of a long-span suspension bridgeunder running train and turbulent windrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 17ndash36 2010
[10] X Z Li and Y Zhu ldquoStochastic space vibration analysis ofa train-bridge coupling systemrdquo Interaction and MultiscaleMechanics vol 3 no 4 pp 55ndash71 2010
[11] J R Yang J Z Li and Y H Chen ldquoVibration analysis ofCFST tied-arch bridge due to moving vehiclesrdquo Interaction andMultiscale Mechanics vol 3 no 4 pp 109ndash121 2010
[12] B O Aalami ldquoStructural modeling of posttensionedmembersrdquoJournal of Structural Engineering vol 126 no 2 pp 157ndash1622000
[13] M A Abraham S Y Park and N Stubbs ldquoLoss of prestressprediction based on nondestructive damage location algo-rithmsrdquo in Proceedings of the Smart Structures and MaterialsSmart Systems for Bridges Structures and Highways pp 60ndash67International Society for Optics and Photonics March 1995
[14] A Miyamoto K Tei H Nakamura and J W Bull ldquoBehavior ofprestressed beam strengthened with external tendonsrdquo Journalof Structural Engineering vol 126 no 9 pp 1033ndash1044 2000
[15] M Saiidi B Douglas and S Feng ldquoPrestress force effect onvibration frequency of concrete bridgesrdquo Journal of StructuralEngineering vol 120 no 7 pp 2233ndash2241 1994
[16] J T Kim C B Yun Y S Ryu and H M Cho ldquoIdentificationof prestress-loss in PSC beams using modal informationrdquoStructural Engineering and Mechanics vol 17 no 3-4 pp 467ndash482 2004
[17] Z R Lu and S S Law ldquoIdentification of prestress force frommeasured structural responsesrdquoMechanical Systems and SignalProcessing vol 20 no 8 pp 2186ndash2199 2006
[18] K J Bathe Finite Element Procedures in Engineering AnalysisPrentice Hall Upper Saddle River NJ USA 1996
[19] S Y Lee and S S Yhim ldquoDynamic behavior of long-span boxgirder bridges subjected to moving loads numerical analysisand experimental verificationrdquo International Journal of Solidsand Structures vol 42 no 18-19 pp 5021ndash5035 2005
[20] ISO 8608 Mechanical VibrationmdashRoad Surface profilesmdashReporting of Measured Data 1995
[21] K C Chang F B Wu and Y B Yang ldquoDisk model for wheelsmoving over highway bridges with rough surfacesrdquo Journal ofSound and Vibration vol 330 no 20 pp 4930ndash4944 2011
[22] J N Juang Applied System Identification Prentice-Hall UpperSaddle River NJ USA 1994
[23] K Henchi M Fafard M Talbot and G Dhatt ldquoAn efficientalgorithm for dynamic analysis of bridges under moving vehi-cles using a coupledmodal and physical components approachrdquoJournal of Sound and Vibration vol 212 no 4 pp 663ndash6831998
[24] M I Friswell and J E Mottershead Finite Element ModelUpdating in Structural Dynamics vol 38 Kluwer AcademicPublishers Dordrecht The Netherlands 1995
[25] A N Tihonov ldquoOn the solution of ill-posed problems and themethod of regularizationrdquo Doklady Akademii Nauk SSSR vol151 pp 501ndash504 1963
[26] J A Figueiras and R H C F Povoas ldquoModelling of prestressin non-linear analysis of concrete structuresrdquo Computers andStructures vol 53 no 1 pp 173ndash187 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of