Research Article An Improved Bayesian Structural...
10
Research Article An Improved Bayesian Structural Identification Using the First Two Derivatives of Log-Likelihood Measure Jin Zhou, Akira Mita, and Liu Mei Department of System Design Engineering, Keio University, 3-14-1 Hiyoshi, Kohoku-ku, Yokohama 223-8522, Japan Correspondence should be addressed to Jin Zhou; [email protected] Received 28 November 2014; Accepted 3 March 2015 Academic Editor: Elio Sacco Copyright © 2015 Jin Zhou et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e posterior density of structural parameters conditioned by the measurement is obtained by a differential evolution adaptive Metropolis algorithm (DREAM). e surface of the formal log-likelihood measure is studied considering the uncertainty of measurement error to illustrate the problem of equifinality. To overcome the problem of equifinality, the first two derivatives of the log-likelihood measure are proposed to formulate a new informal likelihood measure for the sake of improving the accuracy of the estimator. Moreover, the proposed measure also reduces the standard deviation (uncertain range) of the posterior samples. e benefit of the proposed approach is demonstrated by simulations on identifying the structural parameters with limit output data and noise polluted measurements. 1. Introduction Recent years witness the increasing desire of Bayesian esti- mation for structural parametric system when quantifying the inevitable uncertainties, such as measurement error or structural model error and so forth, as is reviewed by Simoen et al. [1]. In particular, Beck and Au [2] used Laplace’s method of asymptotic approximation to obtain a posterior PDF with a small-dimensional parameter space. To solve higher dimen- sional problems, Muto and Beck [3] developed an adaptive Markov chain Monte Carlo (MCMC) simulation for the Bayesian model updating. Gibbs sampling and transitional Markov chain Monte Carlo (TMCMC) were used by Ching and Chen [4] to obtain the posterior PDF of parameters. Che- ung and Beck [5] used a hybrid Monte Carlo method, known as the Hamiltonian Markov chain, to solve higher dimen- sional model updating problems. Huhtala and Bossuyt [6] explored a Bayesian inference framework to solve the inverse problem of locating structural damage. An et al. [7] proposed a statistical model parameter estimation using Bayesian inference when parameters are correlated and observed that data have noise. Green [8] used a novel MCMC algorithm, data annealing, which is similar to simulated annealing, for the Bayesian identification of a nonlinear dynamic system. e difficulty of Bayesian estimation lies in the efficiency in the convergence of posterior samples in the Markov chain to the acceptable model set. Moreover, because of the noise corrupted measurement, the surface of the prediction error lies in a hypersurface of a multidimensional parametric space. It will cause the surface of the probability density for the posterior sequences to have multiple regions of attraction and numerous local optima. It thus inevitably yields a biased estimator (no matter what is called maximum likelihood esti- mator, ML, or maximum a posteriori estimator, MAP). is problem is defined as the “equifinality” [9–11]. e surfaces of the prediction error, using formal likelihood measures, max- imum log-likelihood (ML), are studied. From the surfaces of fitness measures, it can be concluded that the formal likeli- hood measure underestimates or overestimates the uncertain intervals of the posterior samples. e reason is that there are several possible models which can also give high values of likelihood around the neighborhood of the estimator. In this paper, the bias between the ML/MAP estimator and the actual value is deduced by the Taylor expansion. It is found that the gradient and Hessian matrix of the likelihood measure can bridge the biased estimator and the actual value, which is thus proposed to improve the accuracy of the posterior samples. e parameter estimation Hindawi Publishing Corporation Journal of Structures Volume 2015, Article ID 236475, 9 pages http://dx.doi.org/10.1155/2015/236475
Transcript of Research Article An Improved Bayesian Structural...

Research ArticleAn Improved Bayesian Structural Identification Usingthe First Two Derivatives of Log-Likelihood Measure
Jin Zhou Akira Mita and Liu Mei
Department of System Design Engineering Keio University 3-14-1 Hiyoshi Kohoku-ku Yokohama 223-8522 Japan
Correspondence should be addressed to Jin Zhou zhoujin5120gmailcom
Received 28 November 2014 Accepted 3 March 2015
Academic Editor Elio Sacco
Copyright copy 2015 Jin Zhou et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The posterior density of structural parameters conditioned by the measurement is obtained by a differential evolution adaptiveMetropolis algorithm (DREAM) The surface of the formal log-likelihood measure is studied considering the uncertainty ofmeasurement error to illustrate the problem of equifinality To overcome the problem of equifinality the first two derivatives ofthe log-likelihood measure are proposed to formulate a new informal likelihood measure for the sake of improving the accuracy ofthe estimator Moreover the proposed measure also reduces the standard deviation (uncertain range) of the posterior samplesThebenefit of the proposed approach is demonstrated by simulations on identifying the structural parameters with limit output dataand noise polluted measurements
1 Introduction
Recent years witness the increasing desire of Bayesian esti-mation for structural parametric system when quantifyingthe inevitable uncertainties such as measurement error orstructural model error and so forth as is reviewed by Simoenet al [1] In particular Beck andAu [2] used Laplacersquos methodof asymptotic approximation to obtain a posterior PDFwith asmall-dimensional parameter space To solve higher dimen-sional problems Muto and Beck [3] developed an adaptiveMarkov chain Monte Carlo (MCMC) simulation for theBayesian model updating Gibbs sampling and transitionalMarkov chain Monte Carlo (TMCMC) were used by ChingandChen [4] to obtain the posterior PDF of parameters Che-ung and Beck [5] used a hybrid Monte Carlo method knownas the Hamiltonian Markov chain to solve higher dimen-sional model updating problems Huhtala and Bossuyt [6]explored a Bayesian inference framework to solve the inverseproblem of locating structural damage An et al [7] proposeda statistical model parameter estimation using Bayesianinference when parameters are correlated and observed thatdata have noise Green [8] used a novel MCMC algorithmdata annealing which is similar to simulated annealing forthe Bayesian identification of a nonlinear dynamic system
The difficulty of Bayesian estimation lies in the efficiencyin the convergence of posterior samples in the Markov chainto the acceptable model set Moreover because of the noisecorrupted measurement the surface of the prediction errorlies in a hypersurface of amultidimensional parametric spaceIt will cause the surface of the probability density for theposterior sequences to have multiple regions of attractionand numerous local optima It thus inevitably yields a biasedestimator (nomatter what is calledmaximum likelihood esti-mator ML or maximum a posteriori estimator MAP) Thisproblem is defined as the ldquoequifinalityrdquo [9ndash11]The surfaces ofthe prediction error using formal likelihood measures max-imum log-likelihood (ML) are studied From the surfaces offitness measures it can be concluded that the formal likeli-hoodmeasure underestimates or overestimates the uncertainintervals of the posterior samples The reason is that thereare several possible models which can also give high valuesof likelihood around the neighborhood of the estimator
In this paper the bias between the MLMAP estimatorand the actual value is deduced by the Taylor expansionIt is found that the gradient and Hessian matrix of thelikelihood measure can bridge the biased estimator andthe actual value which is thus proposed to improve theaccuracy of the posterior samples The parameter estimation
Hindawi Publishing CorporationJournal of StructuresVolume 2015 Article ID 236475 9 pageshttpdxdoiorg1011552015236475
2 Journal of Structures
problem is proposed as a two-step strategy In the first stepthe MAPML estimator is obtained by the formal Bayesianlikelihood measures using the differential evolution adaptiveMetropolis-Hastings (DREAM) algorithm In the secondstep a new fitness measure is proposed which can be seen asthe informal likelihood measure under the framework of thegeneralized likelihood uncertainty estimation (GLUE) [12ndash14] Numerical examples of a linear structural system arepresented with which the effectiveness and efficiency of theproposed method are investigated
2 Problem Statement
21 Least Squares (LS) Estimator for the Inverse Problem Let119910119898
(119905) denote themeasured response at each time interval (119905 =1 119873
119905) and 119910(x 119905) denotes the output of candidatemodels
The difference between the measured response and modeloutputs is defined as the residual error 119890(x 119905) = 119910
119898
(119905) minus
119910(x 119905) where 119895 = 1 119898 and 119898 is the number of outputsThe commonmeasure for the inverse problem is to attempt toforce the residual vector as close to zero as possible by tuningthe model parameter vector x Thus the fitness measure canbe defined as follows
LS (x) = minus 1
119898 lowast 119873119905
119898
sum
1
119873119905
sum
1
119890 (x 119905)2
xlowast = argmax (LS (x))
(1)
This is an 119899-dimensional optimization issue which maxi-mizes the likelihood measure of SSR (equivalent to minimizethe measure of LS formulation) But such measure can onlyprovide an estimate of optimal value of xlowast If we need toquantify the uncertainty of the estimator it would be adesire to estimate the underlying posterior PDF of parameter119875(x(120579) | 119910
119898
) which is under the framework of Bayesianprobabilistic estimation
22 Bayes Estimate Using Formal Log-Likelihood (LL) Mea-sures In the Bayesian estimation framework the model set119872 is a class of probabilistic models each of which predictsthe response of the actual systemThe identification problemis to infer the plausibility of each candidate model with a pos-terior density distribution conditioned by the measured data119875(x(120579) | 119910119898) it is not a quest for the true structural param-eters x(120579) is a stochastic parameter vector defining eachpossible model in the model set The model setM is definedby random parameters x(120579) = (119909
1(120579) 1199092(120579) 119909
119899(120579)) isin R119899
(120579119873119904
isin Ω 120579 is the random variables in probability space Ω)where 119899 is the number of parameters for model119872
119898isin 119872 and
119873119904is the number of stochastic samplesThe initial plausibility
of each model parameterized by x(120579119896) (119896 = 1 2 119873
119904) is
defined as a prior density function119875(x(120579) | 119872)The updatedplausibility of IO model using Bayesrsquo theorem is as follows
119875 (x (120579) | 119910119898119872)
= 119875 (119910119898
| x (120579) 119872) sdot1198750(x (120579) | 119872)
119875 (119910119898 | 119872)
(2)
119875(119910119898
| x(120579)119872) is the likelihood measure 119871(x(120579)) Ifthemeasurement error is considered as obeying the Gaussian
distribution with a constant variance 1205902119895
(119895th availableobserved response) the posterior PDF in (2) is thus asfollows119875 (x (120579) | 119910119898119872)
=119888minus1
sdot 1198750
(prod119898
119895=1radic2120587120590
119895)119873119905
119890119890
[minussum119898
119895=1(121205901198952)sum119873119905
119905=1(119910119898
119895(119905)minus119910119895(119909(120579)119905))
2]
(3)
where 119888 is the evidence of model class (119888 = 119875(119910119898
|
119872) = int119875(119910119898
| x(120579)119872) sdot 119875(x(120579) | 119872)119889120579) which is ahigh-dimensional integral The difficulty in estimating theposterior PDF is none other than approximating the modelevidence Strives to overcome this challenge are the purposeof the Metropolis-Hastings algorithm For simplicity (2) isrewritten as 119901(120579) = 119871(120579) sdot 119901
0(120579)119888 = 119891(120579)119888 The MH
algorithm generates the posterior PDF with four steps (1)Start with initial samples 120579
0 and compute the likelihood
measures 119891(1205790) (2) The updated samples 120579lowast are produced
by the jumping distribution 119902(1205791 1205792) which is the probability
of returning a value of 1205792given a previous value of 120579
1 The
restriction on the jumping is that the transition is probabilitysymmetric 119902(120579
1 1205792) = 119902(120579
2 1205791) (3) The acceptance ratio
at the updated candidate (120579lowast) and the source posteriorsamples (120579
119905minus1) is 120572(120579) = 119901(120579
lowast
)119901(120579119905minus1) = 119891(120579
lowast
)119891(120579119905minus1) =
119871(120579lowast
)119871(120579119905minus1) (4) If the acceptance ratio 120572 gt 1 accept
the candidate sample 120579lowast if the jump decreases the density120572 lt 1 then it rejects the updating and keeps the currentsamples 120579
119905minus1 The acceptance ratio is as follows
120572 (120579) = min[119871 (120579lowast
)
119871 (120579119905minus1) 1] (4)
It is clear that the advantage of MH algorithm lies in thefact that when computing acceptance ratio there is no needto obtain the model evidence since the constant 119888 cancelsout The transition of samples generates a Markov chain(1205790 1205791 120579
119896 ) Following a burn-in period the Markov
chain approaches its stationary distribution and the samplesafter the burn-in period converge into the posterior PDF119901(120579) as that in (2) From (4) it can be found that the Bayesianestimate relies on the likelihood measure 119875(119910119898 | x(120579)119872)It is more convenient to use the logarithm of the likelihoodmeasures (LL(x(120579))) rather than the likelihood function itself
LL (x (120579)) = minus1198731199052
ln (2120587) minus119873119905
2
119898
sum
119895=1
ln (1205902119895) minus
1
2
119898
sum
119895=1
120590minus2
119895
sdot
119873119905
sum
119905=1
(119910119898
(119905) minus 119910 (x (120579) 119905))2
(5)
Either the log-likelihood measure as is in (5) or the leastsquaremeasure as is in (1) obeys the rule of ldquogoodness-of-fitrdquoThis is because only the model with high probabilistic valueof likelihood in the MHmethod will be accepted
23 The Surface of the Likelihood Measures To illustrate theproblem of ldquoequifinalityrdquo the surfaces of the common-usedlikelihood measure the LL(x(120579)) as is in (5) are simulatedin identifying the stiffness parameters of a 2-DOF linear
Journal of Structures 3
dynamic system The state space of the system is written asfollows
[v1(119905)
v2(119905)] = [
0 IminusMminus1K minusMminus1C
][v1(119905)
v2(119905)]
+ [0
minusI] Γ119879u (119905)
(6)
where M C and K are the mass damping and the stiffnessmatrices I is 119899 times 119899 identity matrix and Γ = [1 1 1]
119879 is1 times 119899 position vector v
1(119905) and v
2(119905) are state space vectors
respectively representing the displacement and velocity andu(119905) is the input of the systemThe systemoutput is an acceler-ationwhich is assumed to be contaminated byGaussianwhitenoise 119908
119895(119905) sim 119873(0120590
119895(120579)) (119895 = 1 119898) The measured
output vector is thus
y (119905) = [minusMminus1K minusMminus1C] [v1(119905)
v2(119905)]
minus Γ119879u (119905) + w (120590 (120579) 119905)
(7)
The mass and stiffness of each DOF are defined as 100 kgand 1000Nm Equation (7) includes a Rayleigh damping 119862Mita [15] where the first two-modal damping ratio (120577
119903) is set
as 5C = 120572M + 120573K
120577119903=
120572
2120596119903
+120573120596119903
2 (119903 = 1 2)
(8)
The parametric domain is meshed by 5 deviation of thetrue value The output acceleration (acc) with different noiselevels (7) was used in the simulation in which the noise level(nl) was defined as 120590
119894= nl times 120590acc The contour plots of the
likelihood measure as is in (5) in the scenarios of noise-freeand different noise level scenarios are exhibited in Figure 1
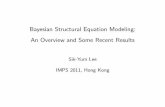
From Figure 1 we can find that only when the mea-surement error is ignored the center of the posterior sam-plings model set (the MLMAP estimator) will be unbiasedhowever taking the noise into account the optimal solutionwith maximum PDF is biased Moreover around the searchneighborhoods of the optimal solution there are manylocal optimums It can conclude that when considering themeasurement error the common likelihoodmeasures as in (1)and in (5) are weak to solve the problem of equifinality Thebias of the estimator will increase with adding the numberof the parametric dimensions and the noise level It is thusnecessary to improve the identified MLMAP estimator
3 The Proposed Accuracy-Improving Method
31 The First Two Deviations of the Likelihood Measure WithTaylorrsquos expansion the likelihoodmeasure can be deduced as
L (x (120579)) = L (x (120579119900)) + L1015840 (x (120579
119900)) Δx
+1
2ΔxTL10158401015840
(x (120579119900)) Δx + o (Δx2)
(9)
where Δx denotes x(120579) minus x(120579119900) With the derivative of (9)
to x(120579) and ignoring the high order derivative series oneobtains
G (x (120579)) = G (x (120579119900)) + Δx H (x (120579
119900)) (10)
where G(x(120579)) is the first order derivative of likelihoodmeasure which is the gradient matrix of L(x(120579)) H(x(120579)) isthe second order derivative of likelihood measure which isthe Hessian matrix of L(x(120579)) G(x(120579
119900)) andH(x(120579
119900)) are the
gradient and Hessian matrix at the point of true value x(120579119900)
Since G(x(120579ML)) = 0 then it yields that
x (120579ML) = x (120579119900) minus G (x (120579
119900)) [H (x (120579
119900))]minus1
(11)
As seen in (11) the bias x(120579ML) minus x(120579119900) is equal to the
negative product of the gradient and the inverse Hessianmatrix at the actual value Equation (11) is thus proposedin this study to formulate the informal likelihood measureLet 119889(x(120579)) = x(120579) minus x(120579ML) denote the bias between theMAPML estimator and each of the posterior samples Theproposed Bayesian updating of the posterior samples usingDREAM algorithm can be divided into two steps The firststep is to find the MLMAP estimator x(120579ML) The secondstep is to search the optimal point x(120579lowast) of the proposedcriteria around the neighborhood of the MLMAP estimatorThe informal likelihood measure can be written as follows
119871lowast
(x (120579)) = 1(10038171003817100381710038171003817119889 (x (120579)) minus G (x (120579)) [H (x (120579))]minus110038171003817100381710038171003817 + 120576)
x (120579lowast) = argmax (119871lowast) (12)
where 120576 denote the credible range which can be decided bythe user as the stop criteria
32 Illustration of the Proposed Likelihood Measure From(12) it can be found that the extreme points of the like-lihood measure 119871lowast(x(120579)) are the actual value x(120579
119900) and
the MAPML estimator x(120579ML) because the former extremevalue is the null point of (11) and the latter item meets thecondition of G(x(120579ML)) = 0 Since the MAPML estimatorx(120579ML) has already been obtained in the first step after thedistribution of the posterior samples has become stationarythe posterior samples on theMarkov chains in the second stepwill converge into the neighborhood around the actual valuedue to the proposed likelihood measure The accuracy of theestimator is thus improved and the uncertain range of theposterior samples will be narrowed around the actual valueTo verify the proposed likelihood measure as is in (12) thesurface and contour for the 2-DOF linear system of whichthe simulation in 100 noise scenario is the same as thatin Section 23 are shown in Figure 2 The accuracy of theposterior samples seen in Figure 2 is improved comparingwith the MAP estimator comparing with Figure 1(b)
33 Two Steps of the DREAM Based Bayesian Estimation
331 Step 1 MAP Estimator Using DREAM Algorithm TheDREAM algorithm combines the DE mutation strategy into
4 Journal of Structures
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(a) (No noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(b) (10 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(c) (30 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(d) (100 noise)
Figure 1 Contour plot of the likelihood measures (ldquo∘rdquo denotes the actual value ldquolowastrdquo denotes the MAPML estimator)
980 990 1000
1000
1010 1020
1020
9800
100
200
300
Prop
osed
like
lihoo
d
k1
k2
(a)
980 990 1000 1010 1020980
990
1000
1010
1020
k1 (Nm)
k2
(Nm
)
(b)
Figure 2 The surface and contour plot of the proposed likelihood measures
Journal of Structures 5
the updating of Markov chains In the transition of Markovchains the posterior samples are updated by the revised DEmutation strategy Let Δ119894
119909(120579) = 119909
119894
119896+1(120579) minus 119909
119894
119896(120579) denote the
jump scale between the updating state (119896+1) and current state(119896) of the 119894th of the Markov chain The samples are updatedas follows
Δ119894
119909= (119868119889+ 119890119889) 120574 (120575 119889) [
[
120575
sum
119895=1
1199091199031(119895)
119896minus
120575
sum
119899=1
1199091199032(119899)
119896
]
]
+ 120576119903 (13)
where 120576119903is a small randomvector that is drawn from119873
119889(0 Σ)
120575 is the number of chosen pairs and 1199031(119895) and 119903
2(119899) are
respectively different and random integers that are chosenfrom the integer set 1 2 119894 minus 1 119894 + 1 119873
119904 The term 119868
119889
signifies the 119889-dimensional identity matrix and 119890119889signifies
a small random vector drawn from a uniform distribution toassure the ergodicity of the samples on theMarkov chainThescaling factor 120574 is decided by the values of 120575 and 119889 whered is the parametric dimension The DREAM algorithm alsoexplores theDE crossover strategy in d dimensions of the cur-rent samples 119909119894
119896(120579) the updated posterior samples 119909119894
119896+1(120579)
and a trial sample 119909119894119895119896+1(120579) is generated with
119909119894119895
119896+1(120579) =
119909119894119895
119896(120579) if und (119895) le 1 minus CR
119909119894119895
119896+1(120579) otherwise
(14)
where 119895 = 1 2 119889 und(119895) is the 119895th independent ran-dom number uniformly distributed in the range of [0 1]CR is a crossover probability defined by the user TheDREAM accepts the candidate state 119909
119896+1(120579) with probability
min(1 120572(119909119896+1(120579) 119909119896(120579))) and keeps the current state 119909
119896(120579)
with probability1minusmin(1 120572(119909119896+1(120579) 119909119896(120579)))TheMH accep-
tance probability 120572(119909119896+1(120579) 119909119896(120579)) is computed by (4) The
posterior samples are updated by (13) and (14) and approachesto a stationary after a burn-in period The convergence ofposterior samples is checked by the Gelman-Rubin criteria[16] The
119895-statistic is computed by using the last 50 of
the samples in each chain The convergence criteria are
= radic119896 + 1
119896times2
119882minus119873119904minus 1
119896 times 119873119904
(15)
where 119896 is the number of the used posterior samples 119882equalssum119896
119894=11199042
119894119896 where 1199042
119894is the variance of the sequence the
posterior variance is estimated as 2 = ((119899minus1)119899)119882+(1119899)119861where 119861 is the variance between the sequences 119861 can becomputed as 119861 = 119873
119904times sum119896
119894=1(119909119894minus 119909)2
(119896 minus 1)
332 Step 2 Density Updating of the Samples That Satisfythe Proposed Criteria When
119895in (14) for each dimension
(119895) is less than 12 the posterior samples on the MC chainconverged into a stationary distributionTheMAP estimatorxMAP is obtained with the maximum posterior PDF Alsothe standard deviation of the posterior samples 120590x(120579) can beobtainedThen the algorithm turns into the second stepThegradient and Hessian matrix of the posterior samples within
the boundary of xMAP∓3120590x(120579) are calculated at each iterationThe proposed informal likelihood measure as in (11) will beused for the updating of the posterior samplesThe estimationprocedure will stop till the prescribed precision 120576 is satisfiedThe gradient matrix and the Hessian matrix at each samplecan be written as
G (x (120579119895)) = [
120597119871
1199091
120597119871
1199092
120597119871
119909119899
]
H (x (120579119895)) =
[[[[[[[[[[[[[[[
[
1205972
119871
12059711990921
1205972
119871
12059711990911199092
sdot sdot sdot1205972
119871
1205971199091119909119899
1205972
119871
12059711990921199091
1205972
119871
12059711990922
sdot sdot sdot1205972
119871
1205971199092119909119899
d
1205972
119871
1205971199091198991199091
1205972
119871
1205971199091198991199091
sdot sdot sdot1205972
119871
1205971199092119899
]]]]]]]]]]]]]]]
]
(16)
where 119895 denotes the 119895th posterior sample and 119899 is the para-metric dimensionThe diagonal and off-diagonal elements oftheH(x(120579
119895)) can be given by (16) and the following equation
119867119897119897
(119909 (120579119895))
=119871(x (120579
119895) + Δ119909
119897(120579119895)) minus 2119871 (x (120579
119895))+ 119871 (x (120579
119895) minus Δ119909
119897(120579119895))
(Δ119909119897(120579119895))2
1198671198971198971015840
(119909 (120579119895)) =
1
4Δ119909119897(120579119895) Δ1199091198971015840 (120579119895)
sdot [119871 (119909 (120579119895) + Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) + Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) minus Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
+119871 (119909 (120579119895) minus Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))]
(17)
34 Identification Procedures Theprocedure of the proposedposterior density estimation is as follows
Step 1 Use the LHS method to generate119873119904sequences for the
initial state of MC chains respecting the prescribed limits ofthe search space The likelihood measure of each sample isobtained by (5)
Step 2 Update the posterior sample of the Markov chain bymutation strategy using (13) and by the crossover probabilityusing (14) Calculate the density for the updated samples
Step 3 The Metropolis acceptance (4) is used for choosingthe accepted posterior samples
Step 4 Return to Step 2 and to Step 3 after the burn-in periodand calculating the convergence criteria using (15) for each
6 Journal of Structures
Table 1 Structural properties
Stiffness (Nm)Levels 1ndash5 50 times 103
Mass (kg)Levels 1ndash4 50Levels 5 45
Damping ratio12057712
005
dimension of the structural parameter If the convergencecriteria of the MC chain are met (
119895lt 12) the MAP
estimator and the standard deviation of the samples areobtained otherwise return to Step 2
Step 5 Calculate the gradient andHessianmatrix at the pointof each sample within the interval of [xMAP ∓ 3120590x(120579)] by (16)and (17)
Step 6 The informal likelihood measure as in (12) is used forthe transition of the posterior samples till the predefined stopcondition is satisfied
4 Numerical Study
41 Identification of a 5-DOF LTI System Numerical simu-lation of a 5-DOF LTI system was carried out to verify theproposed method The structural system is simulated as (6)and the measured signal is as (7)The input was an El-Centrowave lasting 40 s and the sampling frequency was 100Hz(Figure 3) The measurement noise of the 5th DOF in the100 noise level scenarios is shown in Figure 3 Table 1 showsthe structural properties of the dynamic system
The influence of the limited availability of measurementson the proposed method is also assessed in this study Inthe ldquofull outputrdquo scenario measurements of all DOFs areavailable whereas in the ldquopartial outputrdquo case only data fromDOFs 3 and 5 are availableThemass is assumed to be knownhence an 119899-DOF system with 119898-available measurements isdescribed by a model set of which the interested parameter-ized vector is as follows
x (120579) = 1198961(120579) 119896
119899(120579) 1205771(120579) 1205772(120579) (18)
The parameters of the DREAM algorithm were set asfollows the number of Markov chain samples (119873
119904) was 20
the crossover probability (CR) was 085 and the numberof sample pairs (120575) was 5 The search domain was taken tobe 05ndash20 times the true value The identified results areexhibited in Table 2
From Table 2 the conclusion that the proposed methodcan find the optimal value x(120579lowast) in the scenarios of both ldquofulloutputsrdquo and ldquopartial outputsrdquo even when considering largenoise level can be drawn Ignoring the measured noise errorthe proposed method can identify the structural parameterswith no biasThe coefficient variance (cov) of posterior sam-ples is identified as zero which demonstrates that the inverseproblemunder the noise-free scenario is deterministicWhen
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
Input
(a)
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
100 noise
(b)
Figure 3 Input and simulated measured error
the acceleration of each DOF is available for measure themaximumrelative error ranged from0494 in the 30noisecase to 0726 in the 100 noise caseWhile considering thatthe measurements of the 3rd and the 5th DOFs are availablethe maximum relative error ranged from 0701 in the 30noise case to 1044 in the 100 noise case The crediblerange of the posterior samples is depicted by the coefficientvariance of the MC sequences It is clear that the parametricuncertainty was additive with the increasing of measurementerror In the ldquofull outputsrdquo scenario the maximum coefficientvariance (cov) of the posterior samples ranged from 0897in the 30 noise level to 2397 in the 100 noise case Cor-respondingly increasingwith noise level in the partial outputsscenario the maximum cov rises from 2423 to 4197
The convergence progress of the MC samples for eachdimensional structural parameter in the scenario of partialoutput and the consideration 100 noise level are shownin Figure 4 From Figure 4 it is found that the probabilitydensity of the posterior samples inMarkov chain approachedto be stationary after 1500 iterations which is clearly shownin Figure 4(b) The proposed likelihood measure used forthe transition of posterior samples to find the optimalx(120579lowast) works after 2500 iterations The posterior uncertainrange that assures a reliability of 95 can be obtained fromthe posterior samples of the model class which denotesthe plausibility of each IO system Figure 5 shows theuncertain range of the response with 95 assurance and withmeasurement errors at each time interval by incorporatingthe identified standard deviation of the prediction error(time history of initial 10 s is shown) The percentage of theresponse considering a 100 measurement error within theuncertain range that considers prediction error is 9476
Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Structures
problem is proposed as a two-step strategy In the first stepthe MAPML estimator is obtained by the formal Bayesianlikelihood measures using the differential evolution adaptiveMetropolis-Hastings (DREAM) algorithm In the secondstep a new fitness measure is proposed which can be seen asthe informal likelihood measure under the framework of thegeneralized likelihood uncertainty estimation (GLUE) [12ndash14] Numerical examples of a linear structural system arepresented with which the effectiveness and efficiency of theproposed method are investigated
2 Problem Statement
21 Least Squares (LS) Estimator for the Inverse Problem Let119910119898
(119905) denote themeasured response at each time interval (119905 =1 119873
119905) and 119910(x 119905) denotes the output of candidatemodels
The difference between the measured response and modeloutputs is defined as the residual error 119890(x 119905) = 119910
119898
(119905) minus
119910(x 119905) where 119895 = 1 119898 and 119898 is the number of outputsThe commonmeasure for the inverse problem is to attempt toforce the residual vector as close to zero as possible by tuningthe model parameter vector x Thus the fitness measure canbe defined as follows
LS (x) = minus 1
119898 lowast 119873119905
119898
sum
1
119873119905
sum
1
119890 (x 119905)2
xlowast = argmax (LS (x))
(1)
This is an 119899-dimensional optimization issue which maxi-mizes the likelihood measure of SSR (equivalent to minimizethe measure of LS formulation) But such measure can onlyprovide an estimate of optimal value of xlowast If we need toquantify the uncertainty of the estimator it would be adesire to estimate the underlying posterior PDF of parameter119875(x(120579) | 119910
119898
) which is under the framework of Bayesianprobabilistic estimation
22 Bayes Estimate Using Formal Log-Likelihood (LL) Mea-sures In the Bayesian estimation framework the model set119872 is a class of probabilistic models each of which predictsthe response of the actual systemThe identification problemis to infer the plausibility of each candidate model with a pos-terior density distribution conditioned by the measured data119875(x(120579) | 119910119898) it is not a quest for the true structural param-eters x(120579) is a stochastic parameter vector defining eachpossible model in the model set The model setM is definedby random parameters x(120579) = (119909
1(120579) 1199092(120579) 119909
119899(120579)) isin R119899
(120579119873119904
isin Ω 120579 is the random variables in probability space Ω)where 119899 is the number of parameters for model119872
119898isin 119872 and
119873119904is the number of stochastic samplesThe initial plausibility
of each model parameterized by x(120579119896) (119896 = 1 2 119873
119904) is
defined as a prior density function119875(x(120579) | 119872)The updatedplausibility of IO model using Bayesrsquo theorem is as follows
119875 (x (120579) | 119910119898119872)
= 119875 (119910119898
| x (120579) 119872) sdot1198750(x (120579) | 119872)
119875 (119910119898 | 119872)
(2)
119875(119910119898
| x(120579)119872) is the likelihood measure 119871(x(120579)) Ifthemeasurement error is considered as obeying the Gaussian
distribution with a constant variance 1205902119895
(119895th availableobserved response) the posterior PDF in (2) is thus asfollows119875 (x (120579) | 119910119898119872)
=119888minus1
sdot 1198750
(prod119898
119895=1radic2120587120590
119895)119873119905
119890119890
[minussum119898
119895=1(121205901198952)sum119873119905
119905=1(119910119898
119895(119905)minus119910119895(119909(120579)119905))
2]
(3)
where 119888 is the evidence of model class (119888 = 119875(119910119898
|
119872) = int119875(119910119898
| x(120579)119872) sdot 119875(x(120579) | 119872)119889120579) which is ahigh-dimensional integral The difficulty in estimating theposterior PDF is none other than approximating the modelevidence Strives to overcome this challenge are the purposeof the Metropolis-Hastings algorithm For simplicity (2) isrewritten as 119901(120579) = 119871(120579) sdot 119901
0(120579)119888 = 119891(120579)119888 The MH
algorithm generates the posterior PDF with four steps (1)Start with initial samples 120579
0 and compute the likelihood
measures 119891(1205790) (2) The updated samples 120579lowast are produced
by the jumping distribution 119902(1205791 1205792) which is the probability
of returning a value of 1205792given a previous value of 120579
1 The
restriction on the jumping is that the transition is probabilitysymmetric 119902(120579
1 1205792) = 119902(120579
2 1205791) (3) The acceptance ratio
at the updated candidate (120579lowast) and the source posteriorsamples (120579
119905minus1) is 120572(120579) = 119901(120579
lowast
)119901(120579119905minus1) = 119891(120579
lowast
)119891(120579119905minus1) =
119871(120579lowast
)119871(120579119905minus1) (4) If the acceptance ratio 120572 gt 1 accept
the candidate sample 120579lowast if the jump decreases the density120572 lt 1 then it rejects the updating and keeps the currentsamples 120579
119905minus1 The acceptance ratio is as follows
120572 (120579) = min[119871 (120579lowast
)
119871 (120579119905minus1) 1] (4)
It is clear that the advantage of MH algorithm lies in thefact that when computing acceptance ratio there is no needto obtain the model evidence since the constant 119888 cancelsout The transition of samples generates a Markov chain(1205790 1205791 120579
119896 ) Following a burn-in period the Markov
chain approaches its stationary distribution and the samplesafter the burn-in period converge into the posterior PDF119901(120579) as that in (2) From (4) it can be found that the Bayesianestimate relies on the likelihood measure 119875(119910119898 | x(120579)119872)It is more convenient to use the logarithm of the likelihoodmeasures (LL(x(120579))) rather than the likelihood function itself
LL (x (120579)) = minus1198731199052
ln (2120587) minus119873119905
2
119898
sum
119895=1
ln (1205902119895) minus
1
2
119898
sum
119895=1
120590minus2
119895
sdot
119873119905
sum
119905=1
(119910119898
(119905) minus 119910 (x (120579) 119905))2
(5)
Either the log-likelihood measure as is in (5) or the leastsquaremeasure as is in (1) obeys the rule of ldquogoodness-of-fitrdquoThis is because only the model with high probabilistic valueof likelihood in the MHmethod will be accepted
23 The Surface of the Likelihood Measures To illustrate theproblem of ldquoequifinalityrdquo the surfaces of the common-usedlikelihood measure the LL(x(120579)) as is in (5) are simulatedin identifying the stiffness parameters of a 2-DOF linear
Journal of Structures 3
dynamic system The state space of the system is written asfollows
[v1(119905)
v2(119905)] = [
0 IminusMminus1K minusMminus1C
][v1(119905)
v2(119905)]
+ [0
minusI] Γ119879u (119905)
(6)
where M C and K are the mass damping and the stiffnessmatrices I is 119899 times 119899 identity matrix and Γ = [1 1 1]
119879 is1 times 119899 position vector v
1(119905) and v
2(119905) are state space vectors
respectively representing the displacement and velocity andu(119905) is the input of the systemThe systemoutput is an acceler-ationwhich is assumed to be contaminated byGaussianwhitenoise 119908
119895(119905) sim 119873(0120590
119895(120579)) (119895 = 1 119898) The measured
output vector is thus
y (119905) = [minusMminus1K minusMminus1C] [v1(119905)
v2(119905)]
minus Γ119879u (119905) + w (120590 (120579) 119905)
(7)
The mass and stiffness of each DOF are defined as 100 kgand 1000Nm Equation (7) includes a Rayleigh damping 119862Mita [15] where the first two-modal damping ratio (120577
119903) is set
as 5C = 120572M + 120573K
120577119903=
120572
2120596119903
+120573120596119903
2 (119903 = 1 2)
(8)
The parametric domain is meshed by 5 deviation of thetrue value The output acceleration (acc) with different noiselevels (7) was used in the simulation in which the noise level(nl) was defined as 120590
119894= nl times 120590acc The contour plots of the
likelihood measure as is in (5) in the scenarios of noise-freeand different noise level scenarios are exhibited in Figure 1
From Figure 1 we can find that only when the mea-surement error is ignored the center of the posterior sam-plings model set (the MLMAP estimator) will be unbiasedhowever taking the noise into account the optimal solutionwith maximum PDF is biased Moreover around the searchneighborhoods of the optimal solution there are manylocal optimums It can conclude that when considering themeasurement error the common likelihoodmeasures as in (1)and in (5) are weak to solve the problem of equifinality Thebias of the estimator will increase with adding the numberof the parametric dimensions and the noise level It is thusnecessary to improve the identified MLMAP estimator
3 The Proposed Accuracy-Improving Method
31 The First Two Deviations of the Likelihood Measure WithTaylorrsquos expansion the likelihoodmeasure can be deduced as
L (x (120579)) = L (x (120579119900)) + L1015840 (x (120579
119900)) Δx
+1
2ΔxTL10158401015840
(x (120579119900)) Δx + o (Δx2)
(9)
where Δx denotes x(120579) minus x(120579119900) With the derivative of (9)
to x(120579) and ignoring the high order derivative series oneobtains
G (x (120579)) = G (x (120579119900)) + Δx H (x (120579
119900)) (10)
where G(x(120579)) is the first order derivative of likelihoodmeasure which is the gradient matrix of L(x(120579)) H(x(120579)) isthe second order derivative of likelihood measure which isthe Hessian matrix of L(x(120579)) G(x(120579
119900)) andH(x(120579
119900)) are the
gradient and Hessian matrix at the point of true value x(120579119900)
Since G(x(120579ML)) = 0 then it yields that
x (120579ML) = x (120579119900) minus G (x (120579
119900)) [H (x (120579
119900))]minus1
(11)
As seen in (11) the bias x(120579ML) minus x(120579119900) is equal to the
negative product of the gradient and the inverse Hessianmatrix at the actual value Equation (11) is thus proposedin this study to formulate the informal likelihood measureLet 119889(x(120579)) = x(120579) minus x(120579ML) denote the bias between theMAPML estimator and each of the posterior samples Theproposed Bayesian updating of the posterior samples usingDREAM algorithm can be divided into two steps The firststep is to find the MLMAP estimator x(120579ML) The secondstep is to search the optimal point x(120579lowast) of the proposedcriteria around the neighborhood of the MLMAP estimatorThe informal likelihood measure can be written as follows
119871lowast
(x (120579)) = 1(10038171003817100381710038171003817119889 (x (120579)) minus G (x (120579)) [H (x (120579))]minus110038171003817100381710038171003817 + 120576)
x (120579lowast) = argmax (119871lowast) (12)
where 120576 denote the credible range which can be decided bythe user as the stop criteria
32 Illustration of the Proposed Likelihood Measure From(12) it can be found that the extreme points of the like-lihood measure 119871lowast(x(120579)) are the actual value x(120579
119900) and
the MAPML estimator x(120579ML) because the former extremevalue is the null point of (11) and the latter item meets thecondition of G(x(120579ML)) = 0 Since the MAPML estimatorx(120579ML) has already been obtained in the first step after thedistribution of the posterior samples has become stationarythe posterior samples on theMarkov chains in the second stepwill converge into the neighborhood around the actual valuedue to the proposed likelihood measure The accuracy of theestimator is thus improved and the uncertain range of theposterior samples will be narrowed around the actual valueTo verify the proposed likelihood measure as is in (12) thesurface and contour for the 2-DOF linear system of whichthe simulation in 100 noise scenario is the same as thatin Section 23 are shown in Figure 2 The accuracy of theposterior samples seen in Figure 2 is improved comparingwith the MAP estimator comparing with Figure 1(b)
33 Two Steps of the DREAM Based Bayesian Estimation
331 Step 1 MAP Estimator Using DREAM Algorithm TheDREAM algorithm combines the DE mutation strategy into
4 Journal of Structures
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(a) (No noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(b) (10 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(c) (30 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(d) (100 noise)
Figure 1 Contour plot of the likelihood measures (ldquo∘rdquo denotes the actual value ldquolowastrdquo denotes the MAPML estimator)
980 990 1000
1000
1010 1020
1020
9800
100
200
300
Prop
osed
like
lihoo
d
k1
k2
(a)
980 990 1000 1010 1020980
990
1000
1010
1020
k1 (Nm)
k2
(Nm
)
(b)
Figure 2 The surface and contour plot of the proposed likelihood measures
Journal of Structures 5
the updating of Markov chains In the transition of Markovchains the posterior samples are updated by the revised DEmutation strategy Let Δ119894
119909(120579) = 119909
119894
119896+1(120579) minus 119909
119894
119896(120579) denote the
jump scale between the updating state (119896+1) and current state(119896) of the 119894th of the Markov chain The samples are updatedas follows
Δ119894
119909= (119868119889+ 119890119889) 120574 (120575 119889) [
[
120575
sum
119895=1
1199091199031(119895)
119896minus
120575
sum
119899=1
1199091199032(119899)
119896
]
]
+ 120576119903 (13)
where 120576119903is a small randomvector that is drawn from119873
119889(0 Σ)
120575 is the number of chosen pairs and 1199031(119895) and 119903
2(119899) are
respectively different and random integers that are chosenfrom the integer set 1 2 119894 minus 1 119894 + 1 119873
119904 The term 119868
119889
signifies the 119889-dimensional identity matrix and 119890119889signifies
a small random vector drawn from a uniform distribution toassure the ergodicity of the samples on theMarkov chainThescaling factor 120574 is decided by the values of 120575 and 119889 whered is the parametric dimension The DREAM algorithm alsoexplores theDE crossover strategy in d dimensions of the cur-rent samples 119909119894
119896(120579) the updated posterior samples 119909119894
119896+1(120579)
and a trial sample 119909119894119895119896+1(120579) is generated with
119909119894119895
119896+1(120579) =
119909119894119895
119896(120579) if und (119895) le 1 minus CR
119909119894119895
119896+1(120579) otherwise
(14)
where 119895 = 1 2 119889 und(119895) is the 119895th independent ran-dom number uniformly distributed in the range of [0 1]CR is a crossover probability defined by the user TheDREAM accepts the candidate state 119909
119896+1(120579) with probability
min(1 120572(119909119896+1(120579) 119909119896(120579))) and keeps the current state 119909
119896(120579)
with probability1minusmin(1 120572(119909119896+1(120579) 119909119896(120579)))TheMH accep-
tance probability 120572(119909119896+1(120579) 119909119896(120579)) is computed by (4) The
posterior samples are updated by (13) and (14) and approachesto a stationary after a burn-in period The convergence ofposterior samples is checked by the Gelman-Rubin criteria[16] The
119895-statistic is computed by using the last 50 of
the samples in each chain The convergence criteria are
= radic119896 + 1
119896times2
119882minus119873119904minus 1
119896 times 119873119904
(15)
where 119896 is the number of the used posterior samples 119882equalssum119896
119894=11199042
119894119896 where 1199042
119894is the variance of the sequence the
posterior variance is estimated as 2 = ((119899minus1)119899)119882+(1119899)119861where 119861 is the variance between the sequences 119861 can becomputed as 119861 = 119873
119904times sum119896
119894=1(119909119894minus 119909)2
(119896 minus 1)
332 Step 2 Density Updating of the Samples That Satisfythe Proposed Criteria When
119895in (14) for each dimension
(119895) is less than 12 the posterior samples on the MC chainconverged into a stationary distributionTheMAP estimatorxMAP is obtained with the maximum posterior PDF Alsothe standard deviation of the posterior samples 120590x(120579) can beobtainedThen the algorithm turns into the second stepThegradient and Hessian matrix of the posterior samples within
the boundary of xMAP∓3120590x(120579) are calculated at each iterationThe proposed informal likelihood measure as in (11) will beused for the updating of the posterior samplesThe estimationprocedure will stop till the prescribed precision 120576 is satisfiedThe gradient matrix and the Hessian matrix at each samplecan be written as
G (x (120579119895)) = [
120597119871
1199091
120597119871
1199092
120597119871
119909119899
]
H (x (120579119895)) =
[[[[[[[[[[[[[[[
[
1205972
119871
12059711990921
1205972
119871
12059711990911199092
sdot sdot sdot1205972
119871
1205971199091119909119899
1205972
119871
12059711990921199091
1205972
119871
12059711990922
sdot sdot sdot1205972
119871
1205971199092119909119899
d
1205972
119871
1205971199091198991199091
1205972
119871
1205971199091198991199091
sdot sdot sdot1205972
119871
1205971199092119899
]]]]]]]]]]]]]]]
]
(16)
where 119895 denotes the 119895th posterior sample and 119899 is the para-metric dimensionThe diagonal and off-diagonal elements oftheH(x(120579
119895)) can be given by (16) and the following equation
119867119897119897
(119909 (120579119895))
=119871(x (120579
119895) + Δ119909
119897(120579119895)) minus 2119871 (x (120579
119895))+ 119871 (x (120579
119895) minus Δ119909
119897(120579119895))
(Δ119909119897(120579119895))2
1198671198971198971015840
(119909 (120579119895)) =
1
4Δ119909119897(120579119895) Δ1199091198971015840 (120579119895)
sdot [119871 (119909 (120579119895) + Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) + Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) minus Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
+119871 (119909 (120579119895) minus Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))]
(17)
34 Identification Procedures Theprocedure of the proposedposterior density estimation is as follows
Step 1 Use the LHS method to generate119873119904sequences for the
initial state of MC chains respecting the prescribed limits ofthe search space The likelihood measure of each sample isobtained by (5)
Step 2 Update the posterior sample of the Markov chain bymutation strategy using (13) and by the crossover probabilityusing (14) Calculate the density for the updated samples
Step 3 The Metropolis acceptance (4) is used for choosingthe accepted posterior samples
Step 4 Return to Step 2 and to Step 3 after the burn-in periodand calculating the convergence criteria using (15) for each
6 Journal of Structures
Table 1 Structural properties
Stiffness (Nm)Levels 1ndash5 50 times 103
Mass (kg)Levels 1ndash4 50Levels 5 45
Damping ratio12057712
005
dimension of the structural parameter If the convergencecriteria of the MC chain are met (
119895lt 12) the MAP
estimator and the standard deviation of the samples areobtained otherwise return to Step 2
Step 5 Calculate the gradient andHessianmatrix at the pointof each sample within the interval of [xMAP ∓ 3120590x(120579)] by (16)and (17)
Step 6 The informal likelihood measure as in (12) is used forthe transition of the posterior samples till the predefined stopcondition is satisfied
4 Numerical Study
41 Identification of a 5-DOF LTI System Numerical simu-lation of a 5-DOF LTI system was carried out to verify theproposed method The structural system is simulated as (6)and the measured signal is as (7)The input was an El-Centrowave lasting 40 s and the sampling frequency was 100Hz(Figure 3) The measurement noise of the 5th DOF in the100 noise level scenarios is shown in Figure 3 Table 1 showsthe structural properties of the dynamic system
The influence of the limited availability of measurementson the proposed method is also assessed in this study Inthe ldquofull outputrdquo scenario measurements of all DOFs areavailable whereas in the ldquopartial outputrdquo case only data fromDOFs 3 and 5 are availableThemass is assumed to be knownhence an 119899-DOF system with 119898-available measurements isdescribed by a model set of which the interested parameter-ized vector is as follows
x (120579) = 1198961(120579) 119896
119899(120579) 1205771(120579) 1205772(120579) (18)
The parameters of the DREAM algorithm were set asfollows the number of Markov chain samples (119873
119904) was 20
the crossover probability (CR) was 085 and the numberof sample pairs (120575) was 5 The search domain was taken tobe 05ndash20 times the true value The identified results areexhibited in Table 2
From Table 2 the conclusion that the proposed methodcan find the optimal value x(120579lowast) in the scenarios of both ldquofulloutputsrdquo and ldquopartial outputsrdquo even when considering largenoise level can be drawn Ignoring the measured noise errorthe proposed method can identify the structural parameterswith no biasThe coefficient variance (cov) of posterior sam-ples is identified as zero which demonstrates that the inverseproblemunder the noise-free scenario is deterministicWhen
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
Input
(a)
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
100 noise
(b)
Figure 3 Input and simulated measured error
the acceleration of each DOF is available for measure themaximumrelative error ranged from0494 in the 30noisecase to 0726 in the 100 noise caseWhile considering thatthe measurements of the 3rd and the 5th DOFs are availablethe maximum relative error ranged from 0701 in the 30noise case to 1044 in the 100 noise case The crediblerange of the posterior samples is depicted by the coefficientvariance of the MC sequences It is clear that the parametricuncertainty was additive with the increasing of measurementerror In the ldquofull outputsrdquo scenario the maximum coefficientvariance (cov) of the posterior samples ranged from 0897in the 30 noise level to 2397 in the 100 noise case Cor-respondingly increasingwith noise level in the partial outputsscenario the maximum cov rises from 2423 to 4197
The convergence progress of the MC samples for eachdimensional structural parameter in the scenario of partialoutput and the consideration 100 noise level are shownin Figure 4 From Figure 4 it is found that the probabilitydensity of the posterior samples inMarkov chain approachedto be stationary after 1500 iterations which is clearly shownin Figure 4(b) The proposed likelihood measure used forthe transition of posterior samples to find the optimalx(120579lowast) works after 2500 iterations The posterior uncertainrange that assures a reliability of 95 can be obtained fromthe posterior samples of the model class which denotesthe plausibility of each IO system Figure 5 shows theuncertain range of the response with 95 assurance and withmeasurement errors at each time interval by incorporatingthe identified standard deviation of the prediction error(time history of initial 10 s is shown) The percentage of theresponse considering a 100 measurement error within theuncertain range that considers prediction error is 9476
Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Structures 3
dynamic system The state space of the system is written asfollows
[v1(119905)
v2(119905)] = [
0 IminusMminus1K minusMminus1C
][v1(119905)
v2(119905)]
+ [0
minusI] Γ119879u (119905)
(6)
where M C and K are the mass damping and the stiffnessmatrices I is 119899 times 119899 identity matrix and Γ = [1 1 1]
119879 is1 times 119899 position vector v
1(119905) and v
2(119905) are state space vectors
respectively representing the displacement and velocity andu(119905) is the input of the systemThe systemoutput is an acceler-ationwhich is assumed to be contaminated byGaussianwhitenoise 119908
119895(119905) sim 119873(0120590
119895(120579)) (119895 = 1 119898) The measured
output vector is thus
y (119905) = [minusMminus1K minusMminus1C] [v1(119905)
v2(119905)]
minus Γ119879u (119905) + w (120590 (120579) 119905)
(7)
The mass and stiffness of each DOF are defined as 100 kgand 1000Nm Equation (7) includes a Rayleigh damping 119862Mita [15] where the first two-modal damping ratio (120577
119903) is set
as 5C = 120572M + 120573K
120577119903=
120572
2120596119903
+120573120596119903
2 (119903 = 1 2)
(8)
The parametric domain is meshed by 5 deviation of thetrue value The output acceleration (acc) with different noiselevels (7) was used in the simulation in which the noise level(nl) was defined as 120590
119894= nl times 120590acc The contour plots of the
likelihood measure as is in (5) in the scenarios of noise-freeand different noise level scenarios are exhibited in Figure 1
From Figure 1 we can find that only when the mea-surement error is ignored the center of the posterior sam-plings model set (the MLMAP estimator) will be unbiasedhowever taking the noise into account the optimal solutionwith maximum PDF is biased Moreover around the searchneighborhoods of the optimal solution there are manylocal optimums It can conclude that when considering themeasurement error the common likelihoodmeasures as in (1)and in (5) are weak to solve the problem of equifinality Thebias of the estimator will increase with adding the numberof the parametric dimensions and the noise level It is thusnecessary to improve the identified MLMAP estimator
3 The Proposed Accuracy-Improving Method
31 The First Two Deviations of the Likelihood Measure WithTaylorrsquos expansion the likelihoodmeasure can be deduced as
L (x (120579)) = L (x (120579119900)) + L1015840 (x (120579
119900)) Δx
+1
2ΔxTL10158401015840
(x (120579119900)) Δx + o (Δx2)
(9)
where Δx denotes x(120579) minus x(120579119900) With the derivative of (9)
to x(120579) and ignoring the high order derivative series oneobtains
G (x (120579)) = G (x (120579119900)) + Δx H (x (120579
119900)) (10)
where G(x(120579)) is the first order derivative of likelihoodmeasure which is the gradient matrix of L(x(120579)) H(x(120579)) isthe second order derivative of likelihood measure which isthe Hessian matrix of L(x(120579)) G(x(120579
119900)) andH(x(120579
119900)) are the
gradient and Hessian matrix at the point of true value x(120579119900)
Since G(x(120579ML)) = 0 then it yields that
x (120579ML) = x (120579119900) minus G (x (120579
119900)) [H (x (120579
119900))]minus1
(11)
As seen in (11) the bias x(120579ML) minus x(120579119900) is equal to the
negative product of the gradient and the inverse Hessianmatrix at the actual value Equation (11) is thus proposedin this study to formulate the informal likelihood measureLet 119889(x(120579)) = x(120579) minus x(120579ML) denote the bias between theMAPML estimator and each of the posterior samples Theproposed Bayesian updating of the posterior samples usingDREAM algorithm can be divided into two steps The firststep is to find the MLMAP estimator x(120579ML) The secondstep is to search the optimal point x(120579lowast) of the proposedcriteria around the neighborhood of the MLMAP estimatorThe informal likelihood measure can be written as follows
119871lowast
(x (120579)) = 1(10038171003817100381710038171003817119889 (x (120579)) minus G (x (120579)) [H (x (120579))]minus110038171003817100381710038171003817 + 120576)
x (120579lowast) = argmax (119871lowast) (12)
where 120576 denote the credible range which can be decided bythe user as the stop criteria
32 Illustration of the Proposed Likelihood Measure From(12) it can be found that the extreme points of the like-lihood measure 119871lowast(x(120579)) are the actual value x(120579
119900) and
the MAPML estimator x(120579ML) because the former extremevalue is the null point of (11) and the latter item meets thecondition of G(x(120579ML)) = 0 Since the MAPML estimatorx(120579ML) has already been obtained in the first step after thedistribution of the posterior samples has become stationarythe posterior samples on theMarkov chains in the second stepwill converge into the neighborhood around the actual valuedue to the proposed likelihood measure The accuracy of theestimator is thus improved and the uncertain range of theposterior samples will be narrowed around the actual valueTo verify the proposed likelihood measure as is in (12) thesurface and contour for the 2-DOF linear system of whichthe simulation in 100 noise scenario is the same as thatin Section 23 are shown in Figure 2 The accuracy of theposterior samples seen in Figure 2 is improved comparingwith the MAP estimator comparing with Figure 1(b)
33 Two Steps of the DREAM Based Bayesian Estimation
331 Step 1 MAP Estimator Using DREAM Algorithm TheDREAM algorithm combines the DE mutation strategy into
4 Journal of Structures
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(a) (No noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(b) (10 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(c) (30 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(d) (100 noise)
Figure 1 Contour plot of the likelihood measures (ldquo∘rdquo denotes the actual value ldquolowastrdquo denotes the MAPML estimator)
980 990 1000
1000
1010 1020
1020
9800
100
200
300
Prop
osed
like
lihoo
d
k1
k2
(a)
980 990 1000 1010 1020980
990
1000
1010
1020
k1 (Nm)
k2
(Nm
)
(b)
Figure 2 The surface and contour plot of the proposed likelihood measures
Journal of Structures 5
the updating of Markov chains In the transition of Markovchains the posterior samples are updated by the revised DEmutation strategy Let Δ119894
119909(120579) = 119909
119894
119896+1(120579) minus 119909
119894
119896(120579) denote the
jump scale between the updating state (119896+1) and current state(119896) of the 119894th of the Markov chain The samples are updatedas follows
Δ119894
119909= (119868119889+ 119890119889) 120574 (120575 119889) [
[
120575
sum
119895=1
1199091199031(119895)
119896minus
120575
sum
119899=1
1199091199032(119899)
119896
]
]
+ 120576119903 (13)
where 120576119903is a small randomvector that is drawn from119873
119889(0 Σ)
120575 is the number of chosen pairs and 1199031(119895) and 119903
2(119899) are
respectively different and random integers that are chosenfrom the integer set 1 2 119894 minus 1 119894 + 1 119873
119904 The term 119868
119889
signifies the 119889-dimensional identity matrix and 119890119889signifies
a small random vector drawn from a uniform distribution toassure the ergodicity of the samples on theMarkov chainThescaling factor 120574 is decided by the values of 120575 and 119889 whered is the parametric dimension The DREAM algorithm alsoexplores theDE crossover strategy in d dimensions of the cur-rent samples 119909119894
119896(120579) the updated posterior samples 119909119894
119896+1(120579)
and a trial sample 119909119894119895119896+1(120579) is generated with
119909119894119895
119896+1(120579) =
119909119894119895
119896(120579) if und (119895) le 1 minus CR
119909119894119895
119896+1(120579) otherwise
(14)
where 119895 = 1 2 119889 und(119895) is the 119895th independent ran-dom number uniformly distributed in the range of [0 1]CR is a crossover probability defined by the user TheDREAM accepts the candidate state 119909
119896+1(120579) with probability
min(1 120572(119909119896+1(120579) 119909119896(120579))) and keeps the current state 119909
119896(120579)
with probability1minusmin(1 120572(119909119896+1(120579) 119909119896(120579)))TheMH accep-
tance probability 120572(119909119896+1(120579) 119909119896(120579)) is computed by (4) The
posterior samples are updated by (13) and (14) and approachesto a stationary after a burn-in period The convergence ofposterior samples is checked by the Gelman-Rubin criteria[16] The
119895-statistic is computed by using the last 50 of
the samples in each chain The convergence criteria are
= radic119896 + 1
119896times2
119882minus119873119904minus 1
119896 times 119873119904
(15)
where 119896 is the number of the used posterior samples 119882equalssum119896
119894=11199042
119894119896 where 1199042
119894is the variance of the sequence the
posterior variance is estimated as 2 = ((119899minus1)119899)119882+(1119899)119861where 119861 is the variance between the sequences 119861 can becomputed as 119861 = 119873
119904times sum119896
119894=1(119909119894minus 119909)2
(119896 minus 1)
332 Step 2 Density Updating of the Samples That Satisfythe Proposed Criteria When
119895in (14) for each dimension
(119895) is less than 12 the posterior samples on the MC chainconverged into a stationary distributionTheMAP estimatorxMAP is obtained with the maximum posterior PDF Alsothe standard deviation of the posterior samples 120590x(120579) can beobtainedThen the algorithm turns into the second stepThegradient and Hessian matrix of the posterior samples within
the boundary of xMAP∓3120590x(120579) are calculated at each iterationThe proposed informal likelihood measure as in (11) will beused for the updating of the posterior samplesThe estimationprocedure will stop till the prescribed precision 120576 is satisfiedThe gradient matrix and the Hessian matrix at each samplecan be written as
G (x (120579119895)) = [
120597119871
1199091
120597119871
1199092
120597119871
119909119899
]
H (x (120579119895)) =
[[[[[[[[[[[[[[[
[
1205972
119871
12059711990921
1205972
119871
12059711990911199092
sdot sdot sdot1205972
119871
1205971199091119909119899
1205972
119871
12059711990921199091
1205972
119871
12059711990922
sdot sdot sdot1205972
119871
1205971199092119909119899
d
1205972
119871
1205971199091198991199091
1205972
119871
1205971199091198991199091
sdot sdot sdot1205972
119871
1205971199092119899
]]]]]]]]]]]]]]]
]
(16)
where 119895 denotes the 119895th posterior sample and 119899 is the para-metric dimensionThe diagonal and off-diagonal elements oftheH(x(120579
119895)) can be given by (16) and the following equation
119867119897119897
(119909 (120579119895))
=119871(x (120579
119895) + Δ119909
119897(120579119895)) minus 2119871 (x (120579
119895))+ 119871 (x (120579
119895) minus Δ119909
119897(120579119895))
(Δ119909119897(120579119895))2
1198671198971198971015840
(119909 (120579119895)) =
1
4Δ119909119897(120579119895) Δ1199091198971015840 (120579119895)
sdot [119871 (119909 (120579119895) + Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) + Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) minus Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
+119871 (119909 (120579119895) minus Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))]
(17)
34 Identification Procedures Theprocedure of the proposedposterior density estimation is as follows
Step 1 Use the LHS method to generate119873119904sequences for the
initial state of MC chains respecting the prescribed limits ofthe search space The likelihood measure of each sample isobtained by (5)
Step 2 Update the posterior sample of the Markov chain bymutation strategy using (13) and by the crossover probabilityusing (14) Calculate the density for the updated samples
Step 3 The Metropolis acceptance (4) is used for choosingthe accepted posterior samples
Step 4 Return to Step 2 and to Step 3 after the burn-in periodand calculating the convergence criteria using (15) for each
6 Journal of Structures
Table 1 Structural properties
Stiffness (Nm)Levels 1ndash5 50 times 103
Mass (kg)Levels 1ndash4 50Levels 5 45
Damping ratio12057712
005
dimension of the structural parameter If the convergencecriteria of the MC chain are met (
119895lt 12) the MAP
estimator and the standard deviation of the samples areobtained otherwise return to Step 2
Step 5 Calculate the gradient andHessianmatrix at the pointof each sample within the interval of [xMAP ∓ 3120590x(120579)] by (16)and (17)
Step 6 The informal likelihood measure as in (12) is used forthe transition of the posterior samples till the predefined stopcondition is satisfied
4 Numerical Study
41 Identification of a 5-DOF LTI System Numerical simu-lation of a 5-DOF LTI system was carried out to verify theproposed method The structural system is simulated as (6)and the measured signal is as (7)The input was an El-Centrowave lasting 40 s and the sampling frequency was 100Hz(Figure 3) The measurement noise of the 5th DOF in the100 noise level scenarios is shown in Figure 3 Table 1 showsthe structural properties of the dynamic system
The influence of the limited availability of measurementson the proposed method is also assessed in this study Inthe ldquofull outputrdquo scenario measurements of all DOFs areavailable whereas in the ldquopartial outputrdquo case only data fromDOFs 3 and 5 are availableThemass is assumed to be knownhence an 119899-DOF system with 119898-available measurements isdescribed by a model set of which the interested parameter-ized vector is as follows
x (120579) = 1198961(120579) 119896
119899(120579) 1205771(120579) 1205772(120579) (18)
The parameters of the DREAM algorithm were set asfollows the number of Markov chain samples (119873
119904) was 20
the crossover probability (CR) was 085 and the numberof sample pairs (120575) was 5 The search domain was taken tobe 05ndash20 times the true value The identified results areexhibited in Table 2
From Table 2 the conclusion that the proposed methodcan find the optimal value x(120579lowast) in the scenarios of both ldquofulloutputsrdquo and ldquopartial outputsrdquo even when considering largenoise level can be drawn Ignoring the measured noise errorthe proposed method can identify the structural parameterswith no biasThe coefficient variance (cov) of posterior sam-ples is identified as zero which demonstrates that the inverseproblemunder the noise-free scenario is deterministicWhen
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
Input
(a)
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
100 noise
(b)
Figure 3 Input and simulated measured error
the acceleration of each DOF is available for measure themaximumrelative error ranged from0494 in the 30noisecase to 0726 in the 100 noise caseWhile considering thatthe measurements of the 3rd and the 5th DOFs are availablethe maximum relative error ranged from 0701 in the 30noise case to 1044 in the 100 noise case The crediblerange of the posterior samples is depicted by the coefficientvariance of the MC sequences It is clear that the parametricuncertainty was additive with the increasing of measurementerror In the ldquofull outputsrdquo scenario the maximum coefficientvariance (cov) of the posterior samples ranged from 0897in the 30 noise level to 2397 in the 100 noise case Cor-respondingly increasingwith noise level in the partial outputsscenario the maximum cov rises from 2423 to 4197
The convergence progress of the MC samples for eachdimensional structural parameter in the scenario of partialoutput and the consideration 100 noise level are shownin Figure 4 From Figure 4 it is found that the probabilitydensity of the posterior samples inMarkov chain approachedto be stationary after 1500 iterations which is clearly shownin Figure 4(b) The proposed likelihood measure used forthe transition of posterior samples to find the optimalx(120579lowast) works after 2500 iterations The posterior uncertainrange that assures a reliability of 95 can be obtained fromthe posterior samples of the model class which denotesthe plausibility of each IO system Figure 5 shows theuncertain range of the response with 95 assurance and withmeasurement errors at each time interval by incorporatingthe identified standard deviation of the prediction error(time history of initial 10 s is shown) The percentage of theresponse considering a 100 measurement error within theuncertain range that considers prediction error is 9476
Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Structures
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(a) (No noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(b) (10 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(c) (30 noise)
950 1000 1050950
1000
1050
k2
(Nm
)
k1 (Nm)
(d) (100 noise)
Figure 1 Contour plot of the likelihood measures (ldquo∘rdquo denotes the actual value ldquolowastrdquo denotes the MAPML estimator)
980 990 1000
1000
1010 1020
1020
9800
100
200
300
Prop
osed
like
lihoo
d
k1
k2
(a)
980 990 1000 1010 1020980
990
1000
1010
1020
k1 (Nm)
k2
(Nm
)
(b)
Figure 2 The surface and contour plot of the proposed likelihood measures
Journal of Structures 5
the updating of Markov chains In the transition of Markovchains the posterior samples are updated by the revised DEmutation strategy Let Δ119894
119909(120579) = 119909
119894
119896+1(120579) minus 119909
119894
119896(120579) denote the
jump scale between the updating state (119896+1) and current state(119896) of the 119894th of the Markov chain The samples are updatedas follows
Δ119894
119909= (119868119889+ 119890119889) 120574 (120575 119889) [
[
120575
sum
119895=1
1199091199031(119895)
119896minus
120575
sum
119899=1
1199091199032(119899)
119896
]
]
+ 120576119903 (13)
where 120576119903is a small randomvector that is drawn from119873
119889(0 Σ)
120575 is the number of chosen pairs and 1199031(119895) and 119903
2(119899) are
respectively different and random integers that are chosenfrom the integer set 1 2 119894 minus 1 119894 + 1 119873
119904 The term 119868
119889
signifies the 119889-dimensional identity matrix and 119890119889signifies
a small random vector drawn from a uniform distribution toassure the ergodicity of the samples on theMarkov chainThescaling factor 120574 is decided by the values of 120575 and 119889 whered is the parametric dimension The DREAM algorithm alsoexplores theDE crossover strategy in d dimensions of the cur-rent samples 119909119894
119896(120579) the updated posterior samples 119909119894
119896+1(120579)
and a trial sample 119909119894119895119896+1(120579) is generated with
119909119894119895
119896+1(120579) =
119909119894119895
119896(120579) if und (119895) le 1 minus CR
119909119894119895
119896+1(120579) otherwise
(14)
where 119895 = 1 2 119889 und(119895) is the 119895th independent ran-dom number uniformly distributed in the range of [0 1]CR is a crossover probability defined by the user TheDREAM accepts the candidate state 119909
119896+1(120579) with probability
min(1 120572(119909119896+1(120579) 119909119896(120579))) and keeps the current state 119909
119896(120579)
with probability1minusmin(1 120572(119909119896+1(120579) 119909119896(120579)))TheMH accep-
tance probability 120572(119909119896+1(120579) 119909119896(120579)) is computed by (4) The
posterior samples are updated by (13) and (14) and approachesto a stationary after a burn-in period The convergence ofposterior samples is checked by the Gelman-Rubin criteria[16] The
119895-statistic is computed by using the last 50 of
the samples in each chain The convergence criteria are
= radic119896 + 1
119896times2
119882minus119873119904minus 1
119896 times 119873119904
(15)
where 119896 is the number of the used posterior samples 119882equalssum119896
119894=11199042
119894119896 where 1199042
119894is the variance of the sequence the
posterior variance is estimated as 2 = ((119899minus1)119899)119882+(1119899)119861where 119861 is the variance between the sequences 119861 can becomputed as 119861 = 119873
119904times sum119896
119894=1(119909119894minus 119909)2
(119896 minus 1)
332 Step 2 Density Updating of the Samples That Satisfythe Proposed Criteria When
119895in (14) for each dimension
(119895) is less than 12 the posterior samples on the MC chainconverged into a stationary distributionTheMAP estimatorxMAP is obtained with the maximum posterior PDF Alsothe standard deviation of the posterior samples 120590x(120579) can beobtainedThen the algorithm turns into the second stepThegradient and Hessian matrix of the posterior samples within
the boundary of xMAP∓3120590x(120579) are calculated at each iterationThe proposed informal likelihood measure as in (11) will beused for the updating of the posterior samplesThe estimationprocedure will stop till the prescribed precision 120576 is satisfiedThe gradient matrix and the Hessian matrix at each samplecan be written as
G (x (120579119895)) = [
120597119871
1199091
120597119871
1199092
120597119871
119909119899
]
H (x (120579119895)) =
[[[[[[[[[[[[[[[
[
1205972
119871
12059711990921
1205972
119871
12059711990911199092
sdot sdot sdot1205972
119871
1205971199091119909119899
1205972
119871
12059711990921199091
1205972
119871
12059711990922
sdot sdot sdot1205972
119871
1205971199092119909119899
d
1205972
119871
1205971199091198991199091
1205972
119871
1205971199091198991199091
sdot sdot sdot1205972
119871
1205971199092119899
]]]]]]]]]]]]]]]
]
(16)
where 119895 denotes the 119895th posterior sample and 119899 is the para-metric dimensionThe diagonal and off-diagonal elements oftheH(x(120579
119895)) can be given by (16) and the following equation
119867119897119897
(119909 (120579119895))
=119871(x (120579
119895) + Δ119909
119897(120579119895)) minus 2119871 (x (120579
119895))+ 119871 (x (120579
119895) minus Δ119909
119897(120579119895))
(Δ119909119897(120579119895))2
1198671198971198971015840
(119909 (120579119895)) =
1
4Δ119909119897(120579119895) Δ1199091198971015840 (120579119895)
sdot [119871 (119909 (120579119895) + Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) + Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) minus Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
+119871 (119909 (120579119895) minus Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))]
(17)
34 Identification Procedures Theprocedure of the proposedposterior density estimation is as follows
Step 1 Use the LHS method to generate119873119904sequences for the
initial state of MC chains respecting the prescribed limits ofthe search space The likelihood measure of each sample isobtained by (5)
Step 2 Update the posterior sample of the Markov chain bymutation strategy using (13) and by the crossover probabilityusing (14) Calculate the density for the updated samples
Step 3 The Metropolis acceptance (4) is used for choosingthe accepted posterior samples
Step 4 Return to Step 2 and to Step 3 after the burn-in periodand calculating the convergence criteria using (15) for each
6 Journal of Structures
Table 1 Structural properties
Stiffness (Nm)Levels 1ndash5 50 times 103
Mass (kg)Levels 1ndash4 50Levels 5 45
Damping ratio12057712
005
dimension of the structural parameter If the convergencecriteria of the MC chain are met (
119895lt 12) the MAP
estimator and the standard deviation of the samples areobtained otherwise return to Step 2
Step 5 Calculate the gradient andHessianmatrix at the pointof each sample within the interval of [xMAP ∓ 3120590x(120579)] by (16)and (17)
Step 6 The informal likelihood measure as in (12) is used forthe transition of the posterior samples till the predefined stopcondition is satisfied
4 Numerical Study
41 Identification of a 5-DOF LTI System Numerical simu-lation of a 5-DOF LTI system was carried out to verify theproposed method The structural system is simulated as (6)and the measured signal is as (7)The input was an El-Centrowave lasting 40 s and the sampling frequency was 100Hz(Figure 3) The measurement noise of the 5th DOF in the100 noise level scenarios is shown in Figure 3 Table 1 showsthe structural properties of the dynamic system
The influence of the limited availability of measurementson the proposed method is also assessed in this study Inthe ldquofull outputrdquo scenario measurements of all DOFs areavailable whereas in the ldquopartial outputrdquo case only data fromDOFs 3 and 5 are availableThemass is assumed to be knownhence an 119899-DOF system with 119898-available measurements isdescribed by a model set of which the interested parameter-ized vector is as follows
x (120579) = 1198961(120579) 119896
119899(120579) 1205771(120579) 1205772(120579) (18)
The parameters of the DREAM algorithm were set asfollows the number of Markov chain samples (119873
119904) was 20
the crossover probability (CR) was 085 and the numberof sample pairs (120575) was 5 The search domain was taken tobe 05ndash20 times the true value The identified results areexhibited in Table 2
From Table 2 the conclusion that the proposed methodcan find the optimal value x(120579lowast) in the scenarios of both ldquofulloutputsrdquo and ldquopartial outputsrdquo even when considering largenoise level can be drawn Ignoring the measured noise errorthe proposed method can identify the structural parameterswith no biasThe coefficient variance (cov) of posterior sam-ples is identified as zero which demonstrates that the inverseproblemunder the noise-free scenario is deterministicWhen
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
Input
(a)
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
100 noise
(b)
Figure 3 Input and simulated measured error
the acceleration of each DOF is available for measure themaximumrelative error ranged from0494 in the 30noisecase to 0726 in the 100 noise caseWhile considering thatthe measurements of the 3rd and the 5th DOFs are availablethe maximum relative error ranged from 0701 in the 30noise case to 1044 in the 100 noise case The crediblerange of the posterior samples is depicted by the coefficientvariance of the MC sequences It is clear that the parametricuncertainty was additive with the increasing of measurementerror In the ldquofull outputsrdquo scenario the maximum coefficientvariance (cov) of the posterior samples ranged from 0897in the 30 noise level to 2397 in the 100 noise case Cor-respondingly increasingwith noise level in the partial outputsscenario the maximum cov rises from 2423 to 4197
The convergence progress of the MC samples for eachdimensional structural parameter in the scenario of partialoutput and the consideration 100 noise level are shownin Figure 4 From Figure 4 it is found that the probabilitydensity of the posterior samples inMarkov chain approachedto be stationary after 1500 iterations which is clearly shownin Figure 4(b) The proposed likelihood measure used forthe transition of posterior samples to find the optimalx(120579lowast) works after 2500 iterations The posterior uncertainrange that assures a reliability of 95 can be obtained fromthe posterior samples of the model class which denotesthe plausibility of each IO system Figure 5 shows theuncertain range of the response with 95 assurance and withmeasurement errors at each time interval by incorporatingthe identified standard deviation of the prediction error(time history of initial 10 s is shown) The percentage of theresponse considering a 100 measurement error within theuncertain range that considers prediction error is 9476
Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Structures 5
the updating of Markov chains In the transition of Markovchains the posterior samples are updated by the revised DEmutation strategy Let Δ119894
119909(120579) = 119909
119894
119896+1(120579) minus 119909
119894
119896(120579) denote the
jump scale between the updating state (119896+1) and current state(119896) of the 119894th of the Markov chain The samples are updatedas follows
Δ119894
119909= (119868119889+ 119890119889) 120574 (120575 119889) [
[
120575
sum
119895=1
1199091199031(119895)
119896minus
120575
sum
119899=1
1199091199032(119899)
119896
]
]
+ 120576119903 (13)
where 120576119903is a small randomvector that is drawn from119873
119889(0 Σ)
120575 is the number of chosen pairs and 1199031(119895) and 119903
2(119899) are
respectively different and random integers that are chosenfrom the integer set 1 2 119894 minus 1 119894 + 1 119873
119904 The term 119868
119889
signifies the 119889-dimensional identity matrix and 119890119889signifies
a small random vector drawn from a uniform distribution toassure the ergodicity of the samples on theMarkov chainThescaling factor 120574 is decided by the values of 120575 and 119889 whered is the parametric dimension The DREAM algorithm alsoexplores theDE crossover strategy in d dimensions of the cur-rent samples 119909119894
119896(120579) the updated posterior samples 119909119894
119896+1(120579)
and a trial sample 119909119894119895119896+1(120579) is generated with
119909119894119895
119896+1(120579) =
119909119894119895
119896(120579) if und (119895) le 1 minus CR
119909119894119895
119896+1(120579) otherwise
(14)
where 119895 = 1 2 119889 und(119895) is the 119895th independent ran-dom number uniformly distributed in the range of [0 1]CR is a crossover probability defined by the user TheDREAM accepts the candidate state 119909
119896+1(120579) with probability
min(1 120572(119909119896+1(120579) 119909119896(120579))) and keeps the current state 119909
119896(120579)
with probability1minusmin(1 120572(119909119896+1(120579) 119909119896(120579)))TheMH accep-
tance probability 120572(119909119896+1(120579) 119909119896(120579)) is computed by (4) The
posterior samples are updated by (13) and (14) and approachesto a stationary after a burn-in period The convergence ofposterior samples is checked by the Gelman-Rubin criteria[16] The
119895-statistic is computed by using the last 50 of
the samples in each chain The convergence criteria are
= radic119896 + 1
119896times2
119882minus119873119904minus 1
119896 times 119873119904
(15)
where 119896 is the number of the used posterior samples 119882equalssum119896
119894=11199042
119894119896 where 1199042
119894is the variance of the sequence the
posterior variance is estimated as 2 = ((119899minus1)119899)119882+(1119899)119861where 119861 is the variance between the sequences 119861 can becomputed as 119861 = 119873
119904times sum119896
119894=1(119909119894minus 119909)2
(119896 minus 1)
332 Step 2 Density Updating of the Samples That Satisfythe Proposed Criteria When
119895in (14) for each dimension
(119895) is less than 12 the posterior samples on the MC chainconverged into a stationary distributionTheMAP estimatorxMAP is obtained with the maximum posterior PDF Alsothe standard deviation of the posterior samples 120590x(120579) can beobtainedThen the algorithm turns into the second stepThegradient and Hessian matrix of the posterior samples within
the boundary of xMAP∓3120590x(120579) are calculated at each iterationThe proposed informal likelihood measure as in (11) will beused for the updating of the posterior samplesThe estimationprocedure will stop till the prescribed precision 120576 is satisfiedThe gradient matrix and the Hessian matrix at each samplecan be written as
G (x (120579119895)) = [
120597119871
1199091
120597119871
1199092
120597119871
119909119899
]
H (x (120579119895)) =
[[[[[[[[[[[[[[[
[
1205972
119871
12059711990921
1205972
119871
12059711990911199092
sdot sdot sdot1205972
119871
1205971199091119909119899
1205972
119871
12059711990921199091
1205972
119871
12059711990922
sdot sdot sdot1205972
119871
1205971199092119909119899
d
1205972
119871
1205971199091198991199091
1205972
119871
1205971199091198991199091
sdot sdot sdot1205972
119871
1205971199092119899
]]]]]]]]]]]]]]]
]
(16)
where 119895 denotes the 119895th posterior sample and 119899 is the para-metric dimensionThe diagonal and off-diagonal elements oftheH(x(120579
119895)) can be given by (16) and the following equation
119867119897119897
(119909 (120579119895))
=119871(x (120579
119895) + Δ119909
119897(120579119895)) minus 2119871 (x (120579
119895))+ 119871 (x (120579
119895) minus Δ119909
119897(120579119895))
(Δ119909119897(120579119895))2
1198671198971198971015840
(119909 (120579119895)) =
1
4Δ119909119897(120579119895) Δ1199091198971015840 (120579119895)
sdot [119871 (119909 (120579119895) + Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) + Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))
minus 119871 (119909 (120579119895) minus Δ119909
119897(120579119895) + Δ119909
1198971015840 (120579119895))
+119871 (119909 (120579119895) minus Δ119909
119897(120579119895) minus Δ119909
1198971015840 (120579119895))]
(17)
34 Identification Procedures Theprocedure of the proposedposterior density estimation is as follows
Step 1 Use the LHS method to generate119873119904sequences for the
initial state of MC chains respecting the prescribed limits ofthe search space The likelihood measure of each sample isobtained by (5)
Step 2 Update the posterior sample of the Markov chain bymutation strategy using (13) and by the crossover probabilityusing (14) Calculate the density for the updated samples
Step 3 The Metropolis acceptance (4) is used for choosingthe accepted posterior samples
Step 4 Return to Step 2 and to Step 3 after the burn-in periodand calculating the convergence criteria using (15) for each
6 Journal of Structures
Table 1 Structural properties
Stiffness (Nm)Levels 1ndash5 50 times 103
Mass (kg)Levels 1ndash4 50Levels 5 45
Damping ratio12057712
005
dimension of the structural parameter If the convergencecriteria of the MC chain are met (
119895lt 12) the MAP
estimator and the standard deviation of the samples areobtained otherwise return to Step 2
Step 5 Calculate the gradient andHessianmatrix at the pointof each sample within the interval of [xMAP ∓ 3120590x(120579)] by (16)and (17)
Step 6 The informal likelihood measure as in (12) is used forthe transition of the posterior samples till the predefined stopcondition is satisfied
4 Numerical Study
41 Identification of a 5-DOF LTI System Numerical simu-lation of a 5-DOF LTI system was carried out to verify theproposed method The structural system is simulated as (6)and the measured signal is as (7)The input was an El-Centrowave lasting 40 s and the sampling frequency was 100Hz(Figure 3) The measurement noise of the 5th DOF in the100 noise level scenarios is shown in Figure 3 Table 1 showsthe structural properties of the dynamic system
The influence of the limited availability of measurementson the proposed method is also assessed in this study Inthe ldquofull outputrdquo scenario measurements of all DOFs areavailable whereas in the ldquopartial outputrdquo case only data fromDOFs 3 and 5 are availableThemass is assumed to be knownhence an 119899-DOF system with 119898-available measurements isdescribed by a model set of which the interested parameter-ized vector is as follows
x (120579) = 1198961(120579) 119896
119899(120579) 1205771(120579) 1205772(120579) (18)
The parameters of the DREAM algorithm were set asfollows the number of Markov chain samples (119873
119904) was 20
the crossover probability (CR) was 085 and the numberof sample pairs (120575) was 5 The search domain was taken tobe 05ndash20 times the true value The identified results areexhibited in Table 2
From Table 2 the conclusion that the proposed methodcan find the optimal value x(120579lowast) in the scenarios of both ldquofulloutputsrdquo and ldquopartial outputsrdquo even when considering largenoise level can be drawn Ignoring the measured noise errorthe proposed method can identify the structural parameterswith no biasThe coefficient variance (cov) of posterior sam-ples is identified as zero which demonstrates that the inverseproblemunder the noise-free scenario is deterministicWhen
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
Input
(a)
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
100 noise
(b)
Figure 3 Input and simulated measured error
the acceleration of each DOF is available for measure themaximumrelative error ranged from0494 in the 30noisecase to 0726 in the 100 noise caseWhile considering thatthe measurements of the 3rd and the 5th DOFs are availablethe maximum relative error ranged from 0701 in the 30noise case to 1044 in the 100 noise case The crediblerange of the posterior samples is depicted by the coefficientvariance of the MC sequences It is clear that the parametricuncertainty was additive with the increasing of measurementerror In the ldquofull outputsrdquo scenario the maximum coefficientvariance (cov) of the posterior samples ranged from 0897in the 30 noise level to 2397 in the 100 noise case Cor-respondingly increasingwith noise level in the partial outputsscenario the maximum cov rises from 2423 to 4197
The convergence progress of the MC samples for eachdimensional structural parameter in the scenario of partialoutput and the consideration 100 noise level are shownin Figure 4 From Figure 4 it is found that the probabilitydensity of the posterior samples inMarkov chain approachedto be stationary after 1500 iterations which is clearly shownin Figure 4(b) The proposed likelihood measure used forthe transition of posterior samples to find the optimalx(120579lowast) works after 2500 iterations The posterior uncertainrange that assures a reliability of 95 can be obtained fromthe posterior samples of the model class which denotesthe plausibility of each IO system Figure 5 shows theuncertain range of the response with 95 assurance and withmeasurement errors at each time interval by incorporatingthe identified standard deviation of the prediction error(time history of initial 10 s is shown) The percentage of theresponse considering a 100 measurement error within theuncertain range that considers prediction error is 9476
Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Structures
Table 1 Structural properties
Stiffness (Nm)Levels 1ndash5 50 times 103
Mass (kg)Levels 1ndash4 50Levels 5 45
Damping ratio12057712
005
dimension of the structural parameter If the convergencecriteria of the MC chain are met (
119895lt 12) the MAP
estimator and the standard deviation of the samples areobtained otherwise return to Step 2
Step 5 Calculate the gradient andHessianmatrix at the pointof each sample within the interval of [xMAP ∓ 3120590x(120579)] by (16)and (17)
Step 6 The informal likelihood measure as in (12) is used forthe transition of the posterior samples till the predefined stopcondition is satisfied
4 Numerical Study
41 Identification of a 5-DOF LTI System Numerical simu-lation of a 5-DOF LTI system was carried out to verify theproposed method The structural system is simulated as (6)and the measured signal is as (7)The input was an El-Centrowave lasting 40 s and the sampling frequency was 100Hz(Figure 3) The measurement noise of the 5th DOF in the100 noise level scenarios is shown in Figure 3 Table 1 showsthe structural properties of the dynamic system
The influence of the limited availability of measurementson the proposed method is also assessed in this study Inthe ldquofull outputrdquo scenario measurements of all DOFs areavailable whereas in the ldquopartial outputrdquo case only data fromDOFs 3 and 5 are availableThemass is assumed to be knownhence an 119899-DOF system with 119898-available measurements isdescribed by a model set of which the interested parameter-ized vector is as follows
x (120579) = 1198961(120579) 119896
119899(120579) 1205771(120579) 1205772(120579) (18)
The parameters of the DREAM algorithm were set asfollows the number of Markov chain samples (119873
119904) was 20
the crossover probability (CR) was 085 and the numberof sample pairs (120575) was 5 The search domain was taken tobe 05ndash20 times the true value The identified results areexhibited in Table 2
From Table 2 the conclusion that the proposed methodcan find the optimal value x(120579lowast) in the scenarios of both ldquofulloutputsrdquo and ldquopartial outputsrdquo even when considering largenoise level can be drawn Ignoring the measured noise errorthe proposed method can identify the structural parameterswith no biasThe coefficient variance (cov) of posterior sam-ples is identified as zero which demonstrates that the inverseproblemunder the noise-free scenario is deterministicWhen
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
Input
(a)
0 5 10 15 20 25 30 35 40
0
2
4
Time (s)
(ms
2)
minus2
minus4
100 noise
(b)
Figure 3 Input and simulated measured error
the acceleration of each DOF is available for measure themaximumrelative error ranged from0494 in the 30noisecase to 0726 in the 100 noise caseWhile considering thatthe measurements of the 3rd and the 5th DOFs are availablethe maximum relative error ranged from 0701 in the 30noise case to 1044 in the 100 noise case The crediblerange of the posterior samples is depicted by the coefficientvariance of the MC sequences It is clear that the parametricuncertainty was additive with the increasing of measurementerror In the ldquofull outputsrdquo scenario the maximum coefficientvariance (cov) of the posterior samples ranged from 0897in the 30 noise level to 2397 in the 100 noise case Cor-respondingly increasingwith noise level in the partial outputsscenario the maximum cov rises from 2423 to 4197
The convergence progress of the MC samples for eachdimensional structural parameter in the scenario of partialoutput and the consideration 100 noise level are shownin Figure 4 From Figure 4 it is found that the probabilitydensity of the posterior samples inMarkov chain approachedto be stationary after 1500 iterations which is clearly shownin Figure 4(b) The proposed likelihood measure used forthe transition of posterior samples to find the optimalx(120579lowast) works after 2500 iterations The posterior uncertainrange that assures a reliability of 95 can be obtained fromthe posterior samples of the model class which denotesthe plausibility of each IO system Figure 5 shows theuncertain range of the response with 95 assurance and withmeasurement errors at each time interval by incorporatingthe identified standard deviation of the prediction error(time history of initial 10 s is shown) The percentage of theresponse considering a 100 measurement error within theuncertain range that considers prediction error is 9476
Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Structures 7
Table 2 Identified results of structural parameters
Full outputs Partial outputsNo noise 30 noise 100 noise No noise 30 noise 100 noise
1198961
Error 0000 0224 0561 0000 0241 0932Cov 0000 0484 1657 0000 1244 3339
1198962
Error 0000 0239 0487 0000 0395 0498Cov 0000 0358 1137 0000 1852 3039
1198963
Error 0000 0383 0603 0000 0516 0705Cov 0000 0628 2234 0000 1402 3394
1198964
Error 0000 0353 0472 0000 0447 0819Cov 0000 0417 1322 0000 0921 2898
1198965
Error 0000 0473 0681 0000 0486 0691Cov 0000 0443 1475 0000 1893 2323
1205771
Error 0000 0398 0581 0000 0695 1044Cov 0000 0319 2322 0000 2145 3549
1205772
Error 0000 0494 0726 0000 0701 0993Cov 0000 0897 2397 0000 2423 4197
The ldquoErrorrdquo is in and the ldquoCovrdquo (the ratio of standard deviation to the mean) is in
0 1000 2000 3000 4000
4000
6000
8000
10000
Iterations
k5
(Nm
)
(a)
0 1000 2000 3000 40001
12
10
Iterations
k1
k2
k3
k4
k5
1205851
1205852
Rsta
t
(b)
Figure 4 Identification progress for stiffness of the 5th floor (partial output 100 noise)
0 1 2 3 4 5 6 7 8 9 10
0246
Time (s)
Acce
lera
tion(m
s2)
minus2
minus4
minus6
Predictive range considering measurement errorResponse range of parametric uncertainty Measurement with 100 noise level
Figure 5 95 uncertainty ranges for acceleration of the 5th DOF(100 noise partial output)
42 The Identification of a 10-DOF LTI System To show theadvantage of the proposal the identification results of a 10-DOF LTI system using the improved method as is proposedin (12) are compared with the estimation solutions using theformal log-likelihood measure as is in (5) For simplicity themass of each floor is assumed to be 50 kg the stiffness ofeachDOF is equal to 5000Nm and the first two-mode shapedamping ratio is assumed to be 005 The input excitation isthe same as that used in the simulation of the 5-DOF LTIsystem The white noise is added to the measured responsesimulated by (11) where the noise level is assumed to be 1030 and 100 When considering the scenario of partialmeasurements only the even DOFs (2nd 4th 6th 8th and10th) are assumed to be available for Bayesian updating Theresults are shown in Figure 6
In the case of ldquofull outputsrdquo the maximum relative errorof 119909MAP ranges from zero to 0617 in 10 noise level case
8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Structures
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
005
01
(a) Case 1 full outputs
No noise10 noise
30 noise100 noise
Max covMin cov
Max error of MEANMin error of MEAN
Max error of MAPMin error of MAP
0
01
02
(b) Case 2 partial outputs
Figure 6 Identified results using the proposed and traditionallikelihood measures (gray bars traditional likelihood measure bluebars proposed likelihood measure)
1175 in 30 noise level and 1766 in 100 noise levelCorrespondingly the maximum relative error of 119909MAP usingthe traditional likelihood measure increases from zero inthe case of ignoring measurement noise to 0754 in 10noise level 1999 in 30 noise level and 6491 in 100noise level The improvement is also clear in the scenario ofpartial outputs The maximum relative error of 119909MAP usingthe proposed method increases from zero in noise-free caseto 1479 in 10 noise level 2175 in 30 noise level and3543 in 100noise levelWhile themaximumrelative errorof 119909MAP using the traditional method rises from zero in no-noise case to 2621 in 10 noise level 5974 in 30 noiselevel and 8451 in 100 noise level it can be found that theminimum and maximum relative errors of mean posteriorsamples in model set are all reduced using the proposedmethod Moreover it can be found from Figure 6 that using(12) for the parametric uncertainty (the cov) becomes smallerthan that obtained by the formal log-likelihood measureas in (5) For instance when considering the case of 100noise level and partial outputs are available the maximumcoefficient variance of the MC samples using the proposedmethod is 6198 compared with that obtained by traditional
methodwhich is 1109 Comparing the identification resultsshown in Figure 6 it is clear that the accuracy of the estimatorusing the proposed likelihood measure is improved
5 Conclusions
To improve the accuracy of the MAP estimator obtainedby the traditional likelihood measure using the DREAMbased structural identification the gradient and Hessian ofthe log-likelihood measure are proposed to formulate thegeneralized likelihood measure for the density transitionof Markov chains Compared with the formal likelihoodfunction the relative error of the MAP estimator and theuncertain range of the posterior samples using the proposedmethod becomes smaller Numerical simulations of a 5-DOFand 10-DOF LTI system demonstrated their effectiveness insolving identification problems with a high noise level andloss of measurement data In conclusion DREAM basedBayesian estimation using the proposed improvement hasthe potential to solve the problem of ldquoequifinalityrdquo especiallywhen considering large level of measurement error
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported in part by a Grant for the projectldquoImplementation of Shelter Guidance System for CommutersWhoAreUnable to ReturnHome Based on Structural HealthMonitoring of Tall Buildings after Large-Scale Earthquakerdquo(FY2013ndash2016 PI A Mita) from the Japan Science andTechnology Agency
References
[1] E SimoenGDeRoeck andG Lombaert ldquoDealingwith uncer-tainty in model updating for damage assessment a reviewrdquoJournal of Mechanical Systems and Signal Processing vol 56-57pp 123ndash149 2015
[2] J L Beck and S-K Au ldquoBayesian updating of structural modelsand reliability using Markov chain Monte Carlo simulationrdquoJournal of Engineering Mechanics vol 128 no 4 pp 380ndash3912002
[3] M Muto and J L Beck ldquoBayesian updating and model classselection for hysteretic structural models using stochastic sim-ulationrdquo Journal of Vibration and Control vol 14 no 1-2 pp7ndash34 2008
[4] J Ching and Y-C Chen ldquoTransitional Markov Chain MonteCarlo method for Bayesian model updating model class selec-tion and model averagingrdquo Journal of Engineering Mechanicsvol 133 no 7 pp 816ndash832 2007
[5] S H Cheung and J L Beck ldquoBayesian model updating usinghybrid Monte Carlo simulation with application to structuraldynamic models with many uncertain parametersrdquo Journal ofEngineering Mechanics vol 135 no 4 pp 243ndash255 2009
Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Structures 9
[6] A Huhtala and S Bossuyt ldquoA Bayesian approach to vibrationbased structural health monitoring with experimental verifica-tionrdquo Journal of Structural Mechanics vol 44 no 4 pp 330ndash344 2011
[7] D An J-H Choi and N H Kim ldquoIdentification of correlateddamage parameters under noise and bias using Bayesian infer-encerdquo Structural Health Monitoring vol 11 no 3 pp 293ndash3032012
[8] P L Green ldquoBayesian system identification of a nonlineardynamical system using a novel variant of Simulated Anneal-ingrdquo Mechanical Systems and Signal Processing vol 52-53 pp133ndash146 2015
[9] K J Beven ldquoA manifesto for the equifinality thesisrdquo Journal ofHydrology vol 320 no 1-2 pp 18ndash36 2006
[10] J R Stedinger R M Vogel S U Lee et al ldquoApprisal of the gen-eralized likelihood uncertainty estimation (GLUE) methodrdquoWater Resources Research vol 44 no 12 pp 1ndash17 2008
[11] M Sadegh and J A Vrugt ldquoApproximate Bayesian computationin hydrologic modeling equifinality of formal and informalapproachesrdquo Hydrology and Earth System Sciences Discussionsvol 10 pp 4739ndash4797 2013
[12] K Beven and J Freer ldquoEquifinality data assimilation anduncertainty estimation in mechanistic modelling of complexenvironmental systems using the GLUE methodologyrdquo Journalof Hydrology vol 249 no 1ndash4 pp 11ndash29 2001
[13] Y Zhang H H Liu and J Houseworth ldquoModified generalizedlikelihood uncertainty estimation (GLUE) methodology forconsidering the subjectivity of likelihood measure selectionrdquoJournal of Hydrologic Engineering vol 16 no 6 pp 558ndash5612011
[14] Z Li Q Chen Q Xu and K Blanckaert ldquoGeneralized likeli-hood uncertainty estimation method in uncertainty analysis ofnumerical Eutrophication models take bloom as an examplerdquoMathematical Problems in Engineering vol 2013 Article ID701923 9 pages 2013
[15] A Mita Structural Dynamics for Health Monitoring SankeishaNagoya Japan 2003
[16] AGelman andD B Rubin ldquoInference from iterative simulationusing multiple sequencerdquo Statistical Science vol 7 no 4 pp457ndash472 1992
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of