Research Article Adaptive Neural Network Motion Control of...
14
Research Article Adaptive Neural Network Motion Control of Manipulators with Experimental Evaluations S. Puga-Guzmán, 1,2 J. Moreno-Valenzuela, 2 and V. Santibáñez 3 1 Instituto Tecnol´ ogico de Tijuana, Boulevard. Industrial S/N, 22510 Tijuana, BC, Mexico 2 Instituto Polit´ ecnico Nacional-CITEDI, Avenida del Parque 1310, Mesa de Otay, 22510 Tijuana, BC, Mexico 3 Instituto Tecnol´ ogico de La Laguna, Boulevard Revoluci´ on y Cuaht´ emoc, 27000 Torre´ on, COAH, Mexico Correspondence should be addressed to J. Moreno-Valenzuela; [email protected] Received 31 August 2013; Accepted 10 October 2013; Published 19 January 2014 Academic Editors: X. Luo and O. D. Makinde Copyright © 2014 S. Puga-Guzm´ an et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A nonlinear proportional-derivative controller plus adaptive neuronal network compensation is proposed. With the aim of estimating the desired torque, a two-layer neural network is used. en, adaptation laws for the neural network weights are derived. Asymptotic convergence of the position and velocity tracking errors is proven, while the neural network weights are shown to be uniformly bounded. e proposed scheme has been experimentally validated in real time. ese experimental evaluations were carried in two different mechanical systems: a horizontal two degrees-of-freedom robot and a vertical one degree-of-freedom arm which is affected by the gravitational force. In each one of the two experimental set-ups, the proposed scheme was implemented without and with adaptive neural network compensation. Experimental results confirmed the tracking accuracy of the proposed adaptive neural network-based controller. 1. Introduction Robust control consists in designing control strategies by using little information of the system model and considering that the system may be affected by bounded disturbances. Robust controllers can be designed to satisfy either the regulation goal or the trajectory tracking objective. us, in the last years there has been mathematical and practical interest in studying robust control architectures. In this class of controllers, adaptive neural networks have been used in the design of robust controllers for electromechanical systems. Neural networks can be used in the control of unknown systems without requirements for linearity in the system parameters. Neural networks exhibit the universal approx- imation property which allows approximating unknown linear and nonlinear functions [1]. In the following, we provide a literature review on application of neural networks for robot motion control. Selmic and Lewis [2] proposed a dynamical inversion com- pensation scheme by using a backstepping technique with neural networks, which was applied to mechanical sys- tems. Kwan et al. [3] proposed a class of neural network robust controllers showing global asymptotic stability of tracking errors and boundedness of neural network weights. Lewis et al. [1] provided in manner of survey a study of the application of neural networks in the compensation of actuator nonlinearities. In [4] a robust controller with a nonlinear two-layer neural network structure was proposed for control of four-axis SCARA robot manipulator. e error trajectories are proven to be uniformly ultimately bounded. Yu and Li [5] propose a PD-type controller plus neural network compensation of the uncertainties and velocity estimation is achieved by using a high-gain observer. Sta- bility is proven using Lyapunov-based analysis. Wang et al. [6] proposed a neural network-based motion controller in task space. e controller is addressed as two-loop cascade control scheme. e inner loop implements a velocity servo loop at the robot joint level using a radial basis function network with a proportional-integral controller. In [7] an adaptive neural network algorithm is developed for rigid-link electrically driven robot systems. e controller is developed in a constructive form and a rigorous stability analysis is also provided. In Moreno-Armend´ ariz et al. [8], an indirect adaptive control using hierarchical fuzzy CMAC neuronal Hindawi Publishing Corporation e Scientific World Journal Volume 2014, Article ID 694706, 13 pages http://dx.doi.org/10.1155/2014/694706
Transcript of Research Article Adaptive Neural Network Motion Control of...

Research ArticleAdaptive Neural Network Motion Control of Manipulators withExperimental Evaluations
S Puga-Guzmaacuten12 J Moreno-Valenzuela2 and V Santibaacutentildeez3
1 Instituto Tecnologico de Tijuana Boulevard Industrial SN 22510 Tijuana BC Mexico2 Instituto Politecnico Nacional-CITEDI Avenida del Parque 1310 Mesa de Otay 22510 Tijuana BC Mexico3 Instituto Tecnologico de La Laguna Boulevard Revolucion y Cuahtemoc 27000 Torreon COAH Mexico
Correspondence should be addressed to J Moreno-Valenzuela morenocitedimx
Received 31 August 2013 Accepted 10 October 2013 Published 19 January 2014
Academic Editors X Luo and O D Makinde
Copyright copy 2014 S Puga-Guzman et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
A nonlinear proportional-derivative controller plus adaptive neuronal network compensation is proposed With the aim ofestimating the desired torque a two-layer neural network is usedThen adaptation laws for the neural network weights are derivedAsymptotic convergence of the position and velocity tracking errors is proven while the neural network weights are shown to beuniformly bounded The proposed scheme has been experimentally validated in real time These experimental evaluations werecarried in two different mechanical systems a horizontal two degrees-of-freedom robot and a vertical one degree-of-freedom armwhich is affected by the gravitational force In each one of the two experimental set-ups the proposed scheme was implementedwithout and with adaptive neural network compensation Experimental results confirmed the tracking accuracy of the proposedadaptive neural network-based controller
1 Introduction
Robust control consists in designing control strategies byusing little information of the system model and consideringthat the system may be affected by bounded disturbancesRobust controllers can be designed to satisfy either theregulation goal or the trajectory tracking objective Thusin the last years there has been mathematical and practicalinterest in studying robust control architectures In this classof controllers adaptive neural networks have been used in thedesign of robust controllers for electromechanical systems
Neural networks can be used in the control of unknownsystems without requirements for linearity in the systemparameters Neural networks exhibit the universal approx-imation property which allows approximating unknownlinear and nonlinear functions [1]
In the following we provide a literature review onapplication of neural networks for robot motion controlSelmic and Lewis [2] proposed a dynamical inversion com-pensation scheme by using a backstepping technique withneural networks which was applied to mechanical sys-tems Kwan et al [3] proposed a class of neural network
robust controllers showing global asymptotic stability oftracking errors and boundedness of neural network weightsLewis et al [1] provided in manner of survey a study ofthe application of neural networks in the compensation ofactuator nonlinearities In [4] a robust controller with anonlinear two-layer neural network structure was proposedfor control of four-axis SCARA robot manipulator The errortrajectories are proven to be uniformly ultimately boundedYu and Li [5] propose a PD-type controller plus neuralnetwork compensation of the uncertainties and velocityestimation is achieved by using a high-gain observer Sta-bility is proven using Lyapunov-based analysis Wang et al[6] proposed a neural network-based motion controller intask space The controller is addressed as two-loop cascadecontrol scheme The inner loop implements a velocity servoloop at the robot joint level using a radial basis functionnetwork with a proportional-integral controller In [7] anadaptive neural network algorithm is developed for rigid-linkelectrically driven robot systems The controller is developedin a constructive form and a rigorous stability analysis isalso provided In Moreno-Armendariz et al [8] an indirectadaptive control using hierarchical fuzzy CMAC neuronal
Hindawi Publishing Corporatione Scientific World JournalVolume 2014 Article ID 694706 13 pageshttpdxdoiorg1011552014694706
2 The Scientific World Journal
network for the ball and plate system was introduced Theproposed controller was validated by means of numericalsimulations and experiments
Fateh and Alavi [9] introduced a new scheme for theimpedance control of an active suspension system Thecontrol was achieved through two interior loops which areforce control of the actuator by feedback linearization andfuzzy control loop The work proposed by Liu et al in [1011] addressed the problem of control of manipulators withsaturated input In particular new controllers based on fuzzyself-tuning of the proportional and derivative gains wereproposed Although the controllers in [9ndash11] are based infuzzy logic it has been proven in [12] that fuzzy logic systemsand feedforward neural networks are equivalent in essence
In Sun et al [13] a robust tracking control for robotmanipulators in the presence of uncertainties and distur-bances was proposed A neural network-based sliding modeadaptive controlwas designed to ensure trajectory tracking bythe robot manipulator In Hernandez et al [14] a neural PDwith a second order sliding mode compensation techniquewas introduced The scheme is able to guarantee asymptoticconvergence of the error trajectories In [15] in order to dealwith actuator and model nonlinearities a neural network-based controller was addressed The scheme was experimen-tally tested in real time showing the advantages of the neuralnetwork In [16] neural network contouring control using aZebra-Zero robotic manipulator was presentedThe paper in[17] used two modified optimal controllers based on neuralnetworks The closed-loop system trajectories were studiedin a rigorous form although validation was presented withsimulations Other novel approaches of neural networks arepresented in [18 19]
Experimental evidence that neural networks are efficientin the control of a mechanical systems has been provided in[8 15] for example However existing literature reveals a gapin the experimental evaluation of new controllers since mostof the published works only consider numerical simulationsto assess the performance of the proposed controllers
In the present work a different approach is taken In thetheoretical part of our work a neural network is used toapproach the desired torque as a function of the desired jointposition trajectoryThe inner and outer weights of the neuralnetwork are adapted on-line by using an update law comingfrom a Lyapunov-like analysis of the closed-loop system tra-jectories In addition an extensive real-time implementationstudy in two different experimental set-ups has also beencarried out We prove by means of the experimental teststhat the neural network compensation is really effective toreduce the joint tracking error The real-time experimentsshow that an excellent tracking accuracy can be obtained byusing adaptive neural network compensation plus a ldquosmallamountrdquo of nonlinear PDcontrol compensation In summarythe contribution of this paper is twofold
(1) a new nonlinear PD controller plus adaptive neuralnetwork compensation
(2) a real-time experimental study in two different exper-imental set-ups
Our approach is based on the adaptation of the weights of aneural network that only depends on the desired signals ofjoint position velocity and acceleration In other words theneural network used in the controller approaches the desiredtorque In addition to the adaptive neural network feedfor-ward compensation the proposed controller is equippedwithnonlinear PD terms which are motivated by the convergenceanalysis We prove that by using the proposed controllerthe position and velocity error trajectories converge to zerowhile the adapted neural network signals remain uniformlybounded It is noteworthy that the proposed neural networkcontroller resembles the PD control with feedforward com-pensation for robot manipulators whose global asymptoticalconvergence proof was reported in [20 21]
The proposed controller is tested in real time in ahorizontal two-degree-of-freedomdirect-driven arm and in avertical single-link arm which is affected by the gravitationalforce In both experimental set-ups the new scheme isimplemented with and without neural network adaptationThe experimental results show that the tracking performanceis drastically improved by using the new controller with theadaptive neural network feedforward compensation
The difference of this document with respect to ourprevious work in [22] is that here the study of closed-loop trajectories is rigorously presented and experimentalvalidation of the proposed scheme is evaluated in a detailedform
The present document is organized as followsMathemat-ical preliminaries the robot model and the control goal aregiven in Section 2 The proposed controller is discussed inSection 3 Section 4 is devoted to the real-time experimentalresult while some concluding observations are given inSection 5
2 Mathematical PreliminariesRobot Model and Control Goal
Thenotations 120582min119860 and 120582max119860 denote theminimumandmaximumeigenvalues of a symmetric positive definitematrix119860 isin R119899times119899 respectively x = radicx119879x stands for the norm ofvector x isin R119899 119861 = radic120582max119861
119879119861 stands for the inducednorm of a matrix 119861(x) isin R119898times119899 for all x isin R119899
Given 119860 isin R119899times119898 the Frobenius norm is defined [1 23] by
1198602
119865= Tr (119860119879119860) = sum
119894119895
1198862
119894119895 (1)
Other properties are
⟨119860 119861⟩119865= Tr (119860119879119861)
1003816100381610038161003816⟨119860 119861⟩1198651003816100381610038161003816 le 119860
119865119861119865
(2)
21 Properties on Hyperbolic Functions Some properties onhyperbolic functionswill be used See [24 25] where the citedproperties are used in the design and analysis of controllers
The Scientific World Journal 3
for mechanical systems The tangent hyperbolic function isdefined as
tanh (119909) = 119890119909
minus eminus119909
119890119909 + 119890minus119909 (3)
where 119909 isin R The tangent hyperbolic function can bearranged in a vector in the following way
tanh (z) = [tanh (1199111) tanh (119911
119899)]119879
(4)
and the following properties are accomplished by tanh(z)
(a) For all z isin R119899 the Euclidean norm of tanh(z)satisfies
tanh (z) le z
tanh (z) le radic119899
(5)
(b)The time derivative of tanh(z) is given by
119889
119889119905tanh (z) = Sech2 (z) z (6)
where Sech2(z) = diagsech2(1199111) sech2(119911
119899) and
Sech (119909) = 2
119890119909 + 119890minus119909=
1
cosh (119909) (7)
(c)Themaximum eigenvalue of thematrix sech2(x) isone for all z isin R119899 that is
120582max sech2
(z) = 1 (8)
(d) Finally the property
radic
119899
sum
119894=1
ln (cosh (119911119894)) ge
1
radic2tanh (z) forallz isin R
119899
(9)
holds
22 Neural Networks Let us recall the universal approxima-tion property of the neural networks [1 3] A function f(x) R119873+1 rarr R119899 can be approximated by
f (x) = 119882119879
120590 (119881119879x) + 120598 forallx isin R
119873+1
(10)
where x isin R119873+1 is the vector of input signals to the neuralnetwork 119881 isin R(119873+1)times119871 and 119882 isin R119871times119899 are the input andoutput ideal weights respectively 119871 is the number of neuronsin the hidden layer 119873 + 1 is the number of input signals tothe neural network 120590 isin R119871 is the activation function in thehidden layer and 120598 isin R119899 is the approximation error with
10038161003816100381610038161205981198941003816100381610038161003816 le 120601 119894 = 1 119899 (11)
where 120601 gt 0
The output of an activation function 120590119894 R rarr R 119894 =
1 119871 is used to define the output signal of a neuron from amodified combination of its input signals by compressing thesignal The function 120590
119894is usually between the values 0 le 120590
119894le
1 or valued such that minus1 le 120590119894le 1 is satisfied
In this paper we have used as activation function 120590119894the
hyperbolic tangent function Therefore by defining z = 119881119879x
120590 (z) = [tanh(1199111) tanh(119911
119871)]119879
(12)
23 Robot Dynamics Thedynamics in joint space of a serial-chain 119899-link robot manipulator considering the presence offriction at the robot joints can be written as [26 27]
119872(q) q + 119862 (q q) q + g (q) + 119865Vq = 120591 (13)
where q isin R119899 is a vector of joint positions 119872(q) isin R119899times119899
is the symmetric positive definite inertia matrix 119862(q q)q isin
R119899 is the vector of centripetal and Coriolis torques g(q) isinR119899 is the vector of gravitational torques 119865V isin R119899times119899 isa diagonal positive definite matrix containing the viscousfriction coefficients of each joint and 120591 isin R119899 is the vectorof torques input
The dynamics of 119899-link robotic manipulator expressed in(13) has the following properties which hold for rigid-linkrevolute joint manipulators [26ndash28]
Property 1 The inertia matrix 119872(q) is symmetric and posi-tive definite that is
120582min 119872 (q) x2 le x119879119872(q) x le 120582max 119872 (q) x2 (14)
Property 2 Assuming that the robot has revolute joints thevector 119862(q x)y satisfies the bound
1003817100381710038171003817119862 (q x) y1003817100381710038171003817 le 1198961198621x 1003817100381710038171003817y
1003817100381710038171003817 forallq x y isin R119899
(15)
where 1198961198621gt 0
Property 3 Assume that the centrifugal and Coriolis torquematrix 119862(q q) is computed by means of the so-calledChristoffel symbols of the first kind Then
x119879 [ (q) minus 2119862 (q q)] x = 0 forallx q q (16)
Besides
(q) = 119862 (q q) + 119862(q q)119879 (17)
Property 4 The so-called residual dynamics [29 30] isdefined by
h (119905 e e) = [119872 (q119889) minus 119872 (q)] q
119889
+ [119862 (q119889 q119889) minus 119862 (q q)] q
119889
+ g (q119889) minus g (q)
(18)
where e will be defined later and q119889(119905) is the desired joint
position trajectory assumed to be bounded together with its
4 The Scientific World Journal
first and second time derivative The residual dynamics (18)satisfies the following inequality [27]
h (119905 e e) le 119896ℎ1e + 119896
ℎ2
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 (19)
where 119896ℎ1
and kℎ1
are sufficiently large strictly positiveconstants that depend on the robot model parameters and120574 gt 0
24 Control Goal Let us define the joint position trackingerror as
e (119905) = q119889(119905) minus q (119905) (20)
where q119889(119905) isin R119899 denotes the desired joint position
trajectory The estimated weight errors are defined as
= 119882 minus
= 119881 minus (21)
where119881 isin R[119873+1]times119871 are the ideal input weights isin R[119873+1]times119871
is an estimation of the input weights119882 isin R119871times119899 are the idealoutput weights and isin R119871times119899 is an estimation of the outputweights
The desired time-varying trajectory q119889(119905) is assumed to
be three times differentiable and bounded for all time 119905 ge 0
in the sense1003817100381710038171003817q119889 (119905)
1003817100381710038171003817 le 1205831
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205832
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205833
(22)
where 1205831 1205832 and 120583
3denote known positive constants
The control problem consists in designing a controller120591(119905) and update laws for the estimated weights (119905) and (119905)
such that the signals e(119905) e(119905) (119905) and (119905) are uniformlybounded In addition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (23)
should be satisfied
3 Proposed Adaptive Neuronal NetworkCompensation Controller
The proposed controller has a structure of a nonlinearPD controller plus adaptive neural network feedforwardcompensation The design of the controller departs from theassumption that the desired torque can be approached by aneural network and then it can be estimated on-line bymeansof proper adaptation laws for the input and output neuralnetwork weights
31 Proposed Scheme The development of the proposedapproach is presented in a constructive form First let usconsider the robot dynamics (13) evaluated along the desiredposition q
119889isin R119899 such that the desired torque 120591
119889isin R119899 can be
founded by
119872(q119889) q119889+ 119862 (q
119889 q119889) q119889+ g (q
119889) + 119865Vq119889 = 120591119889 (24)
by combining (13) and (24) and using the tracking errordefined in (20) the following equation is obtained
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve = 120591119889 minus 120591 (25)
where h(119905 e e) isin R119899 is the so-called residual dynamics [2930] defined by (18)
By using the universal approximation property of theneural networks in (10) the desired torque in (24) can beapproached as
120591119889= 119882119879
120590 (119881119879x119889) + 120598 (26)
where
x119889= [q119879119889q119879119889q1198791198891]119879
isin R119873+1 (27)
is the vector of input signals to the neural network Noticethat in this case119873 = 3119899
Now we are in position to introduce the followingtracking controller
120591 = 119879
120590 (119879x119889) + 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (28)
where 119870119901 119870119889 and Δ are diagonal positive definite matrices
120574 is a positive scalar is the estimated input weight is theestimated output weight
r = e + 120572 tanh (120574e) (29)
sign (r) = [sign (1199031) sdot sdot sdot sign (119903
119899)]119879
isin R119899
(30)
with
sign (119909) =
1 for 119909 gt 0
0 for 119909 = 0
minus1 for 119909 lt 0
(31)
The proposed update laws for the estimated input andoutput weights denoted as and respectively are
119881 = 119877x
119889r1198791015840 (32)
119882 = 119865r119879 minus 1198651015840119879x
119889r119879 (33)
where 119877 isin R[119873+1]times[119873+1] and 119865 isin R119871times119871 are positive definitematrices = 120590(119879x
119889) and
1015840
=120597120590 (x)120597x
(34)
with 119879x119889
32 Closed-Loop SystemDerivation By substituting (26) and(28) in (25) the equation
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve
= minus119870119901tanh (120574e) minus 119870
119889e
minus Δ sign (r) + 119882119879120590 (119881119879x119889) minus
119879
120590 (119879x119889) + 120598
(35)
The Scientific World Journal 5
is obtained The weight error is defined as in (21) and
= 120590 minus = 120590 (119881119879x119889) minus 120590 (
119879x119889) (36)
Multilayered neural networks are nonlinear in the weights 119881and Taylorrsquos series can be used to approximate the activationfunction 120590 Thus
120590 (119881119879x119889) = 120590 (
119879x119889) + 1205901015840
(119879x119889) 119879x119889+ 119874(
119879x119889)2
(37)
where119874(119879x119889)2 represents the higher order terms Approxi-
mation of activation function via Taylorrsquos series has been usedin for example [1 3] Therefore substituting (21) and (37) in(35) and simplifying we obtain the following expression
119872e = minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+ 119879
120590 + 120596 (119905)
(38)
where119872 = 119872(q) h = h(e e) 119862 = 119862(q q) and
120596 (119905) = 119879
1015840
119881119879x119889+119882119874
2
+ 120598 (39)
with 1198742 = 119874(119879x119889)2
Finally the dynamics of [e119879 e119879]119879 isin R2119899 is given by
119889
119889119905e = e
119889
119889119905e = 119872
minus1
[minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+119879
+ 120596 (119905)]
(40)
By using the definition of the weight errors (21) we canrewrite the proposed update laws (32)-(33) as
119889
119889119905 = minus119877x
119889r1198791198821015840 + 119877x
119889r1198791015840
119889
119889119905 = minus 119865r119879 + 1198651015840119881119879x
119889r119879
minus 1198651015840
119879x119889r119879
(41)
The overall closed-loop system is given by (40) and (41)
33 Convergence Analysis The assumption
119896120596ge 120596 (119905) forall119905 ge 0 (42)
with 119896120596gt 0 and 120596(119905) defined in (39) will be used in the next
Concerning the trajectories of the closed-loop system(40)-(32) we have the following result
Proposition 1 One assumes that the desired trajectory q119889(119905) is
bounded as (22) Then provided that 120582min119870119901 120582min119870119889 and120582minΔ are sufficiently large there always exist strictly positiveconstants 120572lowastmax and 120572
lowast
min such that
120572lowast
min lt 120572 lt 120572lowast
max (43)
guarantees that the trajectories e(119905) e(119905) (119905) and (119905) of theoverall closed-loop system (40)-(32) are uniformly bounded Inaddition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (44)
is satisfied
Proof Let us consider the function
119880 (119905 e e) = 1
2e119879119872e +
119899
sum
119894=1
119870119901119894120574minus1 ln (cosh (120574e
119894))
+ 120572 tanh (120574e)119879119872e + 1
2119879119903(119879
119865minus1
)
+1
2119879119903(119879
119877minus1
)
(45)
which is positive definite in terms of the state space of theclosed-loop system (40)-(32)
By using property (9) a lower bound on 119880(119905 e e) can becomputed as follows
119880 (119905 e e) ge 120578119879[[[
[
1
2120582min 119872 minus
120572
2120582max 119872
minus120572
2120582max 119872
120574minus1
2120582min 119870119901
]]]
]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119875
120578
+1
2119879119903(119879
119865minus1
) +1
2119879119903(119879
119877minus1
)
(46)
with 120578 = [ e tanh(120574e) ]119879If 119875 is positive definite then the function 119880(119905 e e) is
globally positive definite and radially unbounded By usingSylvesterrsquos Theorem the sufficient and necessary conditionfor 119875 to be positive definite is
0 lt 120572 lt
radic120574minus1120582min 119870119901 120582min 119872
120582max 119872 (47)
Next step in the proof is to compute the time derivative of119880(119905 e e) along the closed-loop system trajectories (40) and(32) Thus we have that
(119905 e e) = minus e119879 [119870119889+ 119865V] e minus r119879h + r119879 [120596 minus Δ sign (r)]
+ 120572120574e119879119872Sech2 (120574e) e + 120572 tanh (120574e)119879119862119879e
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
(48)
6 The Scientific World Journal
which was obtained thanks to the property (6) the robotmodel properties (16)-(17) and the facts
Tr (119879r119879) = Tr (r119879119879)
Tr (1198791015840119879x119889r119879) = Tr (r1198791198791015840119879x
119889)
Tr (119879x119889r1198791198791015840) = Tr (r1198791198791015840119879x
119889)
(49)
An upper bound on each term of (119905 e e) is computed asfollows
minuse119879 [119870119889+ 119865V] e le minus120582min 119870119889 + 119865V e
minusr119879h le 120572119896ℎ2
1003817100381710038171003817tanh (120574e)10038171003817100381710038172
+ [120572119896ℎ1+ 119896ℎ2]1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e + 119896ℎ1e2
r119879 [120596 minus Δ sign (r)] le minus [120582min Δ minus 119896120596]119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816
120572120574e119879119872 Sech2 (120574e) e le 120572120574120582max 119872 e2
120572 tanh (120574e)119879119862119879e le 12057211989611986211205832
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 e
+ 1205721198961198621radic119899e2
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
le 120572120582max 119870119889 + 119865V1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
le minus120572120582min 1198701199011003817100381710038171003817tanh (120574e)
10038171003817100381710038172
(50)
where the property of the residual dynamics h in (19)assumption (42) property (8) property (15) and the fact that q le 120583
2+ e with 120583
2defined in (22) were used
With the computed bounds on each term of (119905 e e) wecan write
(119905 e e) le minusp11987911198761p1minus [120582min Δ minus 119896120596]
119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816 (51)
where
p1= [
1003817100381710038171003817tanh (120574e)1003817100381710038171003817
e ] (52)
1198761=[[
[
120572119886 minus1
2[120572119889 + 119890]
minus1
2[120572119889 + 119890] 119887 minus 120572119888
]]
]
(53)
with119886 = 120582min 119870119901 minus 119896ℎ2
119887 = 120582min 119870119889 + 119865V minus 119896ℎ1
119888 = 120574120582max 119872 + 1198961198621radic119899
119889 = 119896ℎ2+ 11989611986211205832+ 120582max 119870119889 + 119865V
119890 = 119896ℎ1
(54)
It is easy to observe that if 1198761in (53) is positive definite
and if
120582min Δ gt 119896120596 (55)
with 119896120596defined in (42) then the function (119905 e e) is negative
semidefinite Besides notice that the matrix1198761in (53) can be
rewritten as
1198761= 119876119886+ 119876119887 (56)
where
119876119886=[[[
[
1
2120572119886 minus
1
2120572119889
minus1
2120572119889
1
2[119887 minus 2120572119888]
]]]
]
119876119887=[[[
[
1
2120572119886 minus
1
2119890
minus1
2119890
1
2119887
]]]
]
(57)
If 119876119886and 119876
119887are positive definite then 119876
1is also positive
definite By applying Sylvesterrsquos criterion the matrix 119876119886is
positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
120572 lt119887
2119888997904rArr 120582min 119870119889 + 119865V gt 119896
ℎ1
120572 lt119886119887
2119886119887 + 1198892
(58)
while 119876119887is positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
119887 gt 0 997904rArr 120582min 119870119889 + 119865V gt 119896ℎ1
120572 gt1198902
119886119887
(59)
Therefore the selection of large enough control gains Δ119870119901and119870
119889guarantee the existence of 120572 satisfying (43) so that
the function 119880(119905 e e) in (45) is positive definite and radiallyunbounded and (119905 e e) in (48) is a negative semidefinitefunction Hence the trajectories e(119905) e(119905) (119905) and (119905)
of the overall closed-loop system (40)-(32) are uniformlybounded
By integrating both sides of (51) it is possible to prove that
int
119905
0
1003817100381710038171003817p1(120588)10038171003817100381710038172
119889120588 le119880 (0 e (0) e (0))
120582min 1198761 (60)
where p1(119905) is defined in (52) Then by invoking Barbalatrsquos
lemma [31] the limit (44) is assured
The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 The Scientific World Journal
network for the ball and plate system was introduced Theproposed controller was validated by means of numericalsimulations and experiments
Fateh and Alavi [9] introduced a new scheme for theimpedance control of an active suspension system Thecontrol was achieved through two interior loops which areforce control of the actuator by feedback linearization andfuzzy control loop The work proposed by Liu et al in [1011] addressed the problem of control of manipulators withsaturated input In particular new controllers based on fuzzyself-tuning of the proportional and derivative gains wereproposed Although the controllers in [9ndash11] are based infuzzy logic it has been proven in [12] that fuzzy logic systemsand feedforward neural networks are equivalent in essence
In Sun et al [13] a robust tracking control for robotmanipulators in the presence of uncertainties and distur-bances was proposed A neural network-based sliding modeadaptive controlwas designed to ensure trajectory tracking bythe robot manipulator In Hernandez et al [14] a neural PDwith a second order sliding mode compensation techniquewas introduced The scheme is able to guarantee asymptoticconvergence of the error trajectories In [15] in order to dealwith actuator and model nonlinearities a neural network-based controller was addressed The scheme was experimen-tally tested in real time showing the advantages of the neuralnetwork In [16] neural network contouring control using aZebra-Zero robotic manipulator was presentedThe paper in[17] used two modified optimal controllers based on neuralnetworks The closed-loop system trajectories were studiedin a rigorous form although validation was presented withsimulations Other novel approaches of neural networks arepresented in [18 19]
Experimental evidence that neural networks are efficientin the control of a mechanical systems has been provided in[8 15] for example However existing literature reveals a gapin the experimental evaluation of new controllers since mostof the published works only consider numerical simulationsto assess the performance of the proposed controllers
In the present work a different approach is taken In thetheoretical part of our work a neural network is used toapproach the desired torque as a function of the desired jointposition trajectoryThe inner and outer weights of the neuralnetwork are adapted on-line by using an update law comingfrom a Lyapunov-like analysis of the closed-loop system tra-jectories In addition an extensive real-time implementationstudy in two different experimental set-ups has also beencarried out We prove by means of the experimental teststhat the neural network compensation is really effective toreduce the joint tracking error The real-time experimentsshow that an excellent tracking accuracy can be obtained byusing adaptive neural network compensation plus a ldquosmallamountrdquo of nonlinear PDcontrol compensation In summarythe contribution of this paper is twofold
(1) a new nonlinear PD controller plus adaptive neuralnetwork compensation
(2) a real-time experimental study in two different exper-imental set-ups
Our approach is based on the adaptation of the weights of aneural network that only depends on the desired signals ofjoint position velocity and acceleration In other words theneural network used in the controller approaches the desiredtorque In addition to the adaptive neural network feedfor-ward compensation the proposed controller is equippedwithnonlinear PD terms which are motivated by the convergenceanalysis We prove that by using the proposed controllerthe position and velocity error trajectories converge to zerowhile the adapted neural network signals remain uniformlybounded It is noteworthy that the proposed neural networkcontroller resembles the PD control with feedforward com-pensation for robot manipulators whose global asymptoticalconvergence proof was reported in [20 21]
The proposed controller is tested in real time in ahorizontal two-degree-of-freedomdirect-driven arm and in avertical single-link arm which is affected by the gravitationalforce In both experimental set-ups the new scheme isimplemented with and without neural network adaptationThe experimental results show that the tracking performanceis drastically improved by using the new controller with theadaptive neural network feedforward compensation
The difference of this document with respect to ourprevious work in [22] is that here the study of closed-loop trajectories is rigorously presented and experimentalvalidation of the proposed scheme is evaluated in a detailedform
The present document is organized as followsMathemat-ical preliminaries the robot model and the control goal aregiven in Section 2 The proposed controller is discussed inSection 3 Section 4 is devoted to the real-time experimentalresult while some concluding observations are given inSection 5
2 Mathematical PreliminariesRobot Model and Control Goal
Thenotations 120582min119860 and 120582max119860 denote theminimumandmaximumeigenvalues of a symmetric positive definitematrix119860 isin R119899times119899 respectively x = radicx119879x stands for the norm ofvector x isin R119899 119861 = radic120582max119861
119879119861 stands for the inducednorm of a matrix 119861(x) isin R119898times119899 for all x isin R119899
Given 119860 isin R119899times119898 the Frobenius norm is defined [1 23] by
1198602
119865= Tr (119860119879119860) = sum
119894119895
1198862
119894119895 (1)
Other properties are
⟨119860 119861⟩119865= Tr (119860119879119861)
1003816100381610038161003816⟨119860 119861⟩1198651003816100381610038161003816 le 119860
119865119861119865
(2)
21 Properties on Hyperbolic Functions Some properties onhyperbolic functionswill be used See [24 25] where the citedproperties are used in the design and analysis of controllers
The Scientific World Journal 3
for mechanical systems The tangent hyperbolic function isdefined as
tanh (119909) = 119890119909
minus eminus119909
119890119909 + 119890minus119909 (3)
where 119909 isin R The tangent hyperbolic function can bearranged in a vector in the following way
tanh (z) = [tanh (1199111) tanh (119911
119899)]119879
(4)
and the following properties are accomplished by tanh(z)
(a) For all z isin R119899 the Euclidean norm of tanh(z)satisfies
tanh (z) le z
tanh (z) le radic119899
(5)
(b)The time derivative of tanh(z) is given by
119889
119889119905tanh (z) = Sech2 (z) z (6)
where Sech2(z) = diagsech2(1199111) sech2(119911
119899) and
Sech (119909) = 2
119890119909 + 119890minus119909=
1
cosh (119909) (7)
(c)Themaximum eigenvalue of thematrix sech2(x) isone for all z isin R119899 that is
120582max sech2
(z) = 1 (8)
(d) Finally the property
radic
119899
sum
119894=1
ln (cosh (119911119894)) ge
1
radic2tanh (z) forallz isin R
119899
(9)
holds
22 Neural Networks Let us recall the universal approxima-tion property of the neural networks [1 3] A function f(x) R119873+1 rarr R119899 can be approximated by
f (x) = 119882119879
120590 (119881119879x) + 120598 forallx isin R
119873+1
(10)
where x isin R119873+1 is the vector of input signals to the neuralnetwork 119881 isin R(119873+1)times119871 and 119882 isin R119871times119899 are the input andoutput ideal weights respectively 119871 is the number of neuronsin the hidden layer 119873 + 1 is the number of input signals tothe neural network 120590 isin R119871 is the activation function in thehidden layer and 120598 isin R119899 is the approximation error with
10038161003816100381610038161205981198941003816100381610038161003816 le 120601 119894 = 1 119899 (11)
where 120601 gt 0
The output of an activation function 120590119894 R rarr R 119894 =
1 119871 is used to define the output signal of a neuron from amodified combination of its input signals by compressing thesignal The function 120590
119894is usually between the values 0 le 120590
119894le
1 or valued such that minus1 le 120590119894le 1 is satisfied
In this paper we have used as activation function 120590119894the
hyperbolic tangent function Therefore by defining z = 119881119879x
120590 (z) = [tanh(1199111) tanh(119911
119871)]119879
(12)
23 Robot Dynamics Thedynamics in joint space of a serial-chain 119899-link robot manipulator considering the presence offriction at the robot joints can be written as [26 27]
119872(q) q + 119862 (q q) q + g (q) + 119865Vq = 120591 (13)
where q isin R119899 is a vector of joint positions 119872(q) isin R119899times119899
is the symmetric positive definite inertia matrix 119862(q q)q isin
R119899 is the vector of centripetal and Coriolis torques g(q) isinR119899 is the vector of gravitational torques 119865V isin R119899times119899 isa diagonal positive definite matrix containing the viscousfriction coefficients of each joint and 120591 isin R119899 is the vectorof torques input
The dynamics of 119899-link robotic manipulator expressed in(13) has the following properties which hold for rigid-linkrevolute joint manipulators [26ndash28]
Property 1 The inertia matrix 119872(q) is symmetric and posi-tive definite that is
120582min 119872 (q) x2 le x119879119872(q) x le 120582max 119872 (q) x2 (14)
Property 2 Assuming that the robot has revolute joints thevector 119862(q x)y satisfies the bound
1003817100381710038171003817119862 (q x) y1003817100381710038171003817 le 1198961198621x 1003817100381710038171003817y
1003817100381710038171003817 forallq x y isin R119899
(15)
where 1198961198621gt 0
Property 3 Assume that the centrifugal and Coriolis torquematrix 119862(q q) is computed by means of the so-calledChristoffel symbols of the first kind Then
x119879 [ (q) minus 2119862 (q q)] x = 0 forallx q q (16)
Besides
(q) = 119862 (q q) + 119862(q q)119879 (17)
Property 4 The so-called residual dynamics [29 30] isdefined by
h (119905 e e) = [119872 (q119889) minus 119872 (q)] q
119889
+ [119862 (q119889 q119889) minus 119862 (q q)] q
119889
+ g (q119889) minus g (q)
(18)
where e will be defined later and q119889(119905) is the desired joint
position trajectory assumed to be bounded together with its
4 The Scientific World Journal
first and second time derivative The residual dynamics (18)satisfies the following inequality [27]
h (119905 e e) le 119896ℎ1e + 119896
ℎ2
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 (19)
where 119896ℎ1
and kℎ1
are sufficiently large strictly positiveconstants that depend on the robot model parameters and120574 gt 0
24 Control Goal Let us define the joint position trackingerror as
e (119905) = q119889(119905) minus q (119905) (20)
where q119889(119905) isin R119899 denotes the desired joint position
trajectory The estimated weight errors are defined as
= 119882 minus
= 119881 minus (21)
where119881 isin R[119873+1]times119871 are the ideal input weights isin R[119873+1]times119871
is an estimation of the input weights119882 isin R119871times119899 are the idealoutput weights and isin R119871times119899 is an estimation of the outputweights
The desired time-varying trajectory q119889(119905) is assumed to
be three times differentiable and bounded for all time 119905 ge 0
in the sense1003817100381710038171003817q119889 (119905)
1003817100381710038171003817 le 1205831
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205832
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205833
(22)
where 1205831 1205832 and 120583
3denote known positive constants
The control problem consists in designing a controller120591(119905) and update laws for the estimated weights (119905) and (119905)
such that the signals e(119905) e(119905) (119905) and (119905) are uniformlybounded In addition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (23)
should be satisfied
3 Proposed Adaptive Neuronal NetworkCompensation Controller
The proposed controller has a structure of a nonlinearPD controller plus adaptive neural network feedforwardcompensation The design of the controller departs from theassumption that the desired torque can be approached by aneural network and then it can be estimated on-line bymeansof proper adaptation laws for the input and output neuralnetwork weights
31 Proposed Scheme The development of the proposedapproach is presented in a constructive form First let usconsider the robot dynamics (13) evaluated along the desiredposition q
119889isin R119899 such that the desired torque 120591
119889isin R119899 can be
founded by
119872(q119889) q119889+ 119862 (q
119889 q119889) q119889+ g (q
119889) + 119865Vq119889 = 120591119889 (24)
by combining (13) and (24) and using the tracking errordefined in (20) the following equation is obtained
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve = 120591119889 minus 120591 (25)
where h(119905 e e) isin R119899 is the so-called residual dynamics [2930] defined by (18)
By using the universal approximation property of theneural networks in (10) the desired torque in (24) can beapproached as
120591119889= 119882119879
120590 (119881119879x119889) + 120598 (26)
where
x119889= [q119879119889q119879119889q1198791198891]119879
isin R119873+1 (27)
is the vector of input signals to the neural network Noticethat in this case119873 = 3119899
Now we are in position to introduce the followingtracking controller
120591 = 119879
120590 (119879x119889) + 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (28)
where 119870119901 119870119889 and Δ are diagonal positive definite matrices
120574 is a positive scalar is the estimated input weight is theestimated output weight
r = e + 120572 tanh (120574e) (29)
sign (r) = [sign (1199031) sdot sdot sdot sign (119903
119899)]119879
isin R119899
(30)
with
sign (119909) =
1 for 119909 gt 0
0 for 119909 = 0
minus1 for 119909 lt 0
(31)
The proposed update laws for the estimated input andoutput weights denoted as and respectively are
119881 = 119877x
119889r1198791015840 (32)
119882 = 119865r119879 minus 1198651015840119879x
119889r119879 (33)
where 119877 isin R[119873+1]times[119873+1] and 119865 isin R119871times119871 are positive definitematrices = 120590(119879x
119889) and
1015840
=120597120590 (x)120597x
(34)
with 119879x119889
32 Closed-Loop SystemDerivation By substituting (26) and(28) in (25) the equation
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve
= minus119870119901tanh (120574e) minus 119870
119889e
minus Δ sign (r) + 119882119879120590 (119881119879x119889) minus
119879
120590 (119879x119889) + 120598
(35)
The Scientific World Journal 5
is obtained The weight error is defined as in (21) and
= 120590 minus = 120590 (119881119879x119889) minus 120590 (
119879x119889) (36)
Multilayered neural networks are nonlinear in the weights 119881and Taylorrsquos series can be used to approximate the activationfunction 120590 Thus
120590 (119881119879x119889) = 120590 (
119879x119889) + 1205901015840
(119879x119889) 119879x119889+ 119874(
119879x119889)2
(37)
where119874(119879x119889)2 represents the higher order terms Approxi-
mation of activation function via Taylorrsquos series has been usedin for example [1 3] Therefore substituting (21) and (37) in(35) and simplifying we obtain the following expression
119872e = minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+ 119879
120590 + 120596 (119905)
(38)
where119872 = 119872(q) h = h(e e) 119862 = 119862(q q) and
120596 (119905) = 119879
1015840
119881119879x119889+119882119874
2
+ 120598 (39)
with 1198742 = 119874(119879x119889)2
Finally the dynamics of [e119879 e119879]119879 isin R2119899 is given by
119889
119889119905e = e
119889
119889119905e = 119872
minus1
[minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+119879
+ 120596 (119905)]
(40)
By using the definition of the weight errors (21) we canrewrite the proposed update laws (32)-(33) as
119889
119889119905 = minus119877x
119889r1198791198821015840 + 119877x
119889r1198791015840
119889
119889119905 = minus 119865r119879 + 1198651015840119881119879x
119889r119879
minus 1198651015840
119879x119889r119879
(41)
The overall closed-loop system is given by (40) and (41)
33 Convergence Analysis The assumption
119896120596ge 120596 (119905) forall119905 ge 0 (42)
with 119896120596gt 0 and 120596(119905) defined in (39) will be used in the next
Concerning the trajectories of the closed-loop system(40)-(32) we have the following result
Proposition 1 One assumes that the desired trajectory q119889(119905) is
bounded as (22) Then provided that 120582min119870119901 120582min119870119889 and120582minΔ are sufficiently large there always exist strictly positiveconstants 120572lowastmax and 120572
lowast
min such that
120572lowast
min lt 120572 lt 120572lowast
max (43)
guarantees that the trajectories e(119905) e(119905) (119905) and (119905) of theoverall closed-loop system (40)-(32) are uniformly bounded Inaddition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (44)
is satisfied
Proof Let us consider the function
119880 (119905 e e) = 1
2e119879119872e +
119899
sum
119894=1
119870119901119894120574minus1 ln (cosh (120574e
119894))
+ 120572 tanh (120574e)119879119872e + 1
2119879119903(119879
119865minus1
)
+1
2119879119903(119879
119877minus1
)
(45)
which is positive definite in terms of the state space of theclosed-loop system (40)-(32)
By using property (9) a lower bound on 119880(119905 e e) can becomputed as follows
119880 (119905 e e) ge 120578119879[[[
[
1
2120582min 119872 minus
120572
2120582max 119872
minus120572
2120582max 119872
120574minus1
2120582min 119870119901
]]]
]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119875
120578
+1
2119879119903(119879
119865minus1
) +1
2119879119903(119879
119877minus1
)
(46)
with 120578 = [ e tanh(120574e) ]119879If 119875 is positive definite then the function 119880(119905 e e) is
globally positive definite and radially unbounded By usingSylvesterrsquos Theorem the sufficient and necessary conditionfor 119875 to be positive definite is
0 lt 120572 lt
radic120574minus1120582min 119870119901 120582min 119872
120582max 119872 (47)
Next step in the proof is to compute the time derivative of119880(119905 e e) along the closed-loop system trajectories (40) and(32) Thus we have that
(119905 e e) = minus e119879 [119870119889+ 119865V] e minus r119879h + r119879 [120596 minus Δ sign (r)]
+ 120572120574e119879119872Sech2 (120574e) e + 120572 tanh (120574e)119879119862119879e
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
(48)
6 The Scientific World Journal
which was obtained thanks to the property (6) the robotmodel properties (16)-(17) and the facts
Tr (119879r119879) = Tr (r119879119879)
Tr (1198791015840119879x119889r119879) = Tr (r1198791198791015840119879x
119889)
Tr (119879x119889r1198791198791015840) = Tr (r1198791198791015840119879x
119889)
(49)
An upper bound on each term of (119905 e e) is computed asfollows
minuse119879 [119870119889+ 119865V] e le minus120582min 119870119889 + 119865V e
minusr119879h le 120572119896ℎ2
1003817100381710038171003817tanh (120574e)10038171003817100381710038172
+ [120572119896ℎ1+ 119896ℎ2]1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e + 119896ℎ1e2
r119879 [120596 minus Δ sign (r)] le minus [120582min Δ minus 119896120596]119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816
120572120574e119879119872 Sech2 (120574e) e le 120572120574120582max 119872 e2
120572 tanh (120574e)119879119862119879e le 12057211989611986211205832
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 e
+ 1205721198961198621radic119899e2
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
le 120572120582max 119870119889 + 119865V1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
le minus120572120582min 1198701199011003817100381710038171003817tanh (120574e)
10038171003817100381710038172
(50)
where the property of the residual dynamics h in (19)assumption (42) property (8) property (15) and the fact that q le 120583
2+ e with 120583
2defined in (22) were used
With the computed bounds on each term of (119905 e e) wecan write
(119905 e e) le minusp11987911198761p1minus [120582min Δ minus 119896120596]
119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816 (51)
where
p1= [
1003817100381710038171003817tanh (120574e)1003817100381710038171003817
e ] (52)
1198761=[[
[
120572119886 minus1
2[120572119889 + 119890]
minus1
2[120572119889 + 119890] 119887 minus 120572119888
]]
]
(53)
with119886 = 120582min 119870119901 minus 119896ℎ2
119887 = 120582min 119870119889 + 119865V minus 119896ℎ1
119888 = 120574120582max 119872 + 1198961198621radic119899
119889 = 119896ℎ2+ 11989611986211205832+ 120582max 119870119889 + 119865V
119890 = 119896ℎ1
(54)
It is easy to observe that if 1198761in (53) is positive definite
and if
120582min Δ gt 119896120596 (55)
with 119896120596defined in (42) then the function (119905 e e) is negative
semidefinite Besides notice that the matrix1198761in (53) can be
rewritten as
1198761= 119876119886+ 119876119887 (56)
where
119876119886=[[[
[
1
2120572119886 minus
1
2120572119889
minus1
2120572119889
1
2[119887 minus 2120572119888]
]]]
]
119876119887=[[[
[
1
2120572119886 minus
1
2119890
minus1
2119890
1
2119887
]]]
]
(57)
If 119876119886and 119876
119887are positive definite then 119876
1is also positive
definite By applying Sylvesterrsquos criterion the matrix 119876119886is
positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
120572 lt119887
2119888997904rArr 120582min 119870119889 + 119865V gt 119896
ℎ1
120572 lt119886119887
2119886119887 + 1198892
(58)
while 119876119887is positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
119887 gt 0 997904rArr 120582min 119870119889 + 119865V gt 119896ℎ1
120572 gt1198902
119886119887
(59)
Therefore the selection of large enough control gains Δ119870119901and119870
119889guarantee the existence of 120572 satisfying (43) so that
the function 119880(119905 e e) in (45) is positive definite and radiallyunbounded and (119905 e e) in (48) is a negative semidefinitefunction Hence the trajectories e(119905) e(119905) (119905) and (119905)
of the overall closed-loop system (40)-(32) are uniformlybounded
By integrating both sides of (51) it is possible to prove that
int
119905
0
1003817100381710038171003817p1(120588)10038171003817100381710038172
119889120588 le119880 (0 e (0) e (0))
120582min 1198761 (60)
where p1(119905) is defined in (52) Then by invoking Barbalatrsquos
lemma [31] the limit (44) is assured
The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 3
for mechanical systems The tangent hyperbolic function isdefined as
tanh (119909) = 119890119909
minus eminus119909
119890119909 + 119890minus119909 (3)
where 119909 isin R The tangent hyperbolic function can bearranged in a vector in the following way
tanh (z) = [tanh (1199111) tanh (119911
119899)]119879
(4)
and the following properties are accomplished by tanh(z)
(a) For all z isin R119899 the Euclidean norm of tanh(z)satisfies
tanh (z) le z
tanh (z) le radic119899
(5)
(b)The time derivative of tanh(z) is given by
119889
119889119905tanh (z) = Sech2 (z) z (6)
where Sech2(z) = diagsech2(1199111) sech2(119911
119899) and
Sech (119909) = 2
119890119909 + 119890minus119909=
1
cosh (119909) (7)
(c)Themaximum eigenvalue of thematrix sech2(x) isone for all z isin R119899 that is
120582max sech2
(z) = 1 (8)
(d) Finally the property
radic
119899
sum
119894=1
ln (cosh (119911119894)) ge
1
radic2tanh (z) forallz isin R
119899
(9)
holds
22 Neural Networks Let us recall the universal approxima-tion property of the neural networks [1 3] A function f(x) R119873+1 rarr R119899 can be approximated by
f (x) = 119882119879
120590 (119881119879x) + 120598 forallx isin R
119873+1
(10)
where x isin R119873+1 is the vector of input signals to the neuralnetwork 119881 isin R(119873+1)times119871 and 119882 isin R119871times119899 are the input andoutput ideal weights respectively 119871 is the number of neuronsin the hidden layer 119873 + 1 is the number of input signals tothe neural network 120590 isin R119871 is the activation function in thehidden layer and 120598 isin R119899 is the approximation error with
10038161003816100381610038161205981198941003816100381610038161003816 le 120601 119894 = 1 119899 (11)
where 120601 gt 0
The output of an activation function 120590119894 R rarr R 119894 =
1 119871 is used to define the output signal of a neuron from amodified combination of its input signals by compressing thesignal The function 120590
119894is usually between the values 0 le 120590
119894le
1 or valued such that minus1 le 120590119894le 1 is satisfied
In this paper we have used as activation function 120590119894the
hyperbolic tangent function Therefore by defining z = 119881119879x
120590 (z) = [tanh(1199111) tanh(119911
119871)]119879
(12)
23 Robot Dynamics Thedynamics in joint space of a serial-chain 119899-link robot manipulator considering the presence offriction at the robot joints can be written as [26 27]
119872(q) q + 119862 (q q) q + g (q) + 119865Vq = 120591 (13)
where q isin R119899 is a vector of joint positions 119872(q) isin R119899times119899
is the symmetric positive definite inertia matrix 119862(q q)q isin
R119899 is the vector of centripetal and Coriolis torques g(q) isinR119899 is the vector of gravitational torques 119865V isin R119899times119899 isa diagonal positive definite matrix containing the viscousfriction coefficients of each joint and 120591 isin R119899 is the vectorof torques input
The dynamics of 119899-link robotic manipulator expressed in(13) has the following properties which hold for rigid-linkrevolute joint manipulators [26ndash28]
Property 1 The inertia matrix 119872(q) is symmetric and posi-tive definite that is
120582min 119872 (q) x2 le x119879119872(q) x le 120582max 119872 (q) x2 (14)
Property 2 Assuming that the robot has revolute joints thevector 119862(q x)y satisfies the bound
1003817100381710038171003817119862 (q x) y1003817100381710038171003817 le 1198961198621x 1003817100381710038171003817y
1003817100381710038171003817 forallq x y isin R119899
(15)
where 1198961198621gt 0
Property 3 Assume that the centrifugal and Coriolis torquematrix 119862(q q) is computed by means of the so-calledChristoffel symbols of the first kind Then
x119879 [ (q) minus 2119862 (q q)] x = 0 forallx q q (16)
Besides
(q) = 119862 (q q) + 119862(q q)119879 (17)
Property 4 The so-called residual dynamics [29 30] isdefined by
h (119905 e e) = [119872 (q119889) minus 119872 (q)] q
119889
+ [119862 (q119889 q119889) minus 119862 (q q)] q
119889
+ g (q119889) minus g (q)
(18)
where e will be defined later and q119889(119905) is the desired joint
position trajectory assumed to be bounded together with its
4 The Scientific World Journal
first and second time derivative The residual dynamics (18)satisfies the following inequality [27]
h (119905 e e) le 119896ℎ1e + 119896
ℎ2
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 (19)
where 119896ℎ1
and kℎ1
are sufficiently large strictly positiveconstants that depend on the robot model parameters and120574 gt 0
24 Control Goal Let us define the joint position trackingerror as
e (119905) = q119889(119905) minus q (119905) (20)
where q119889(119905) isin R119899 denotes the desired joint position
trajectory The estimated weight errors are defined as
= 119882 minus
= 119881 minus (21)
where119881 isin R[119873+1]times119871 are the ideal input weights isin R[119873+1]times119871
is an estimation of the input weights119882 isin R119871times119899 are the idealoutput weights and isin R119871times119899 is an estimation of the outputweights
The desired time-varying trajectory q119889(119905) is assumed to
be three times differentiable and bounded for all time 119905 ge 0
in the sense1003817100381710038171003817q119889 (119905)
1003817100381710038171003817 le 1205831
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205832
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205833
(22)
where 1205831 1205832 and 120583
3denote known positive constants
The control problem consists in designing a controller120591(119905) and update laws for the estimated weights (119905) and (119905)
such that the signals e(119905) e(119905) (119905) and (119905) are uniformlybounded In addition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (23)
should be satisfied
3 Proposed Adaptive Neuronal NetworkCompensation Controller
The proposed controller has a structure of a nonlinearPD controller plus adaptive neural network feedforwardcompensation The design of the controller departs from theassumption that the desired torque can be approached by aneural network and then it can be estimated on-line bymeansof proper adaptation laws for the input and output neuralnetwork weights
31 Proposed Scheme The development of the proposedapproach is presented in a constructive form First let usconsider the robot dynamics (13) evaluated along the desiredposition q
119889isin R119899 such that the desired torque 120591
119889isin R119899 can be
founded by
119872(q119889) q119889+ 119862 (q
119889 q119889) q119889+ g (q
119889) + 119865Vq119889 = 120591119889 (24)
by combining (13) and (24) and using the tracking errordefined in (20) the following equation is obtained
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve = 120591119889 minus 120591 (25)
where h(119905 e e) isin R119899 is the so-called residual dynamics [2930] defined by (18)
By using the universal approximation property of theneural networks in (10) the desired torque in (24) can beapproached as
120591119889= 119882119879
120590 (119881119879x119889) + 120598 (26)
where
x119889= [q119879119889q119879119889q1198791198891]119879
isin R119873+1 (27)
is the vector of input signals to the neural network Noticethat in this case119873 = 3119899
Now we are in position to introduce the followingtracking controller
120591 = 119879
120590 (119879x119889) + 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (28)
where 119870119901 119870119889 and Δ are diagonal positive definite matrices
120574 is a positive scalar is the estimated input weight is theestimated output weight
r = e + 120572 tanh (120574e) (29)
sign (r) = [sign (1199031) sdot sdot sdot sign (119903
119899)]119879
isin R119899
(30)
with
sign (119909) =
1 for 119909 gt 0
0 for 119909 = 0
minus1 for 119909 lt 0
(31)
The proposed update laws for the estimated input andoutput weights denoted as and respectively are
119881 = 119877x
119889r1198791015840 (32)
119882 = 119865r119879 minus 1198651015840119879x
119889r119879 (33)
where 119877 isin R[119873+1]times[119873+1] and 119865 isin R119871times119871 are positive definitematrices = 120590(119879x
119889) and
1015840
=120597120590 (x)120597x
(34)
with 119879x119889
32 Closed-Loop SystemDerivation By substituting (26) and(28) in (25) the equation
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve
= minus119870119901tanh (120574e) minus 119870
119889e
minus Δ sign (r) + 119882119879120590 (119881119879x119889) minus
119879
120590 (119879x119889) + 120598
(35)
The Scientific World Journal 5
is obtained The weight error is defined as in (21) and
= 120590 minus = 120590 (119881119879x119889) minus 120590 (
119879x119889) (36)
Multilayered neural networks are nonlinear in the weights 119881and Taylorrsquos series can be used to approximate the activationfunction 120590 Thus
120590 (119881119879x119889) = 120590 (
119879x119889) + 1205901015840
(119879x119889) 119879x119889+ 119874(
119879x119889)2
(37)
where119874(119879x119889)2 represents the higher order terms Approxi-
mation of activation function via Taylorrsquos series has been usedin for example [1 3] Therefore substituting (21) and (37) in(35) and simplifying we obtain the following expression
119872e = minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+ 119879
120590 + 120596 (119905)
(38)
where119872 = 119872(q) h = h(e e) 119862 = 119862(q q) and
120596 (119905) = 119879
1015840
119881119879x119889+119882119874
2
+ 120598 (39)
with 1198742 = 119874(119879x119889)2
Finally the dynamics of [e119879 e119879]119879 isin R2119899 is given by
119889
119889119905e = e
119889
119889119905e = 119872
minus1
[minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+119879
+ 120596 (119905)]
(40)
By using the definition of the weight errors (21) we canrewrite the proposed update laws (32)-(33) as
119889
119889119905 = minus119877x
119889r1198791198821015840 + 119877x
119889r1198791015840
119889
119889119905 = minus 119865r119879 + 1198651015840119881119879x
119889r119879
minus 1198651015840
119879x119889r119879
(41)
The overall closed-loop system is given by (40) and (41)
33 Convergence Analysis The assumption
119896120596ge 120596 (119905) forall119905 ge 0 (42)
with 119896120596gt 0 and 120596(119905) defined in (39) will be used in the next
Concerning the trajectories of the closed-loop system(40)-(32) we have the following result
Proposition 1 One assumes that the desired trajectory q119889(119905) is
bounded as (22) Then provided that 120582min119870119901 120582min119870119889 and120582minΔ are sufficiently large there always exist strictly positiveconstants 120572lowastmax and 120572
lowast
min such that
120572lowast
min lt 120572 lt 120572lowast
max (43)
guarantees that the trajectories e(119905) e(119905) (119905) and (119905) of theoverall closed-loop system (40)-(32) are uniformly bounded Inaddition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (44)
is satisfied
Proof Let us consider the function
119880 (119905 e e) = 1
2e119879119872e +
119899
sum
119894=1
119870119901119894120574minus1 ln (cosh (120574e
119894))
+ 120572 tanh (120574e)119879119872e + 1
2119879119903(119879
119865minus1
)
+1
2119879119903(119879
119877minus1
)
(45)
which is positive definite in terms of the state space of theclosed-loop system (40)-(32)
By using property (9) a lower bound on 119880(119905 e e) can becomputed as follows
119880 (119905 e e) ge 120578119879[[[
[
1
2120582min 119872 minus
120572
2120582max 119872
minus120572
2120582max 119872
120574minus1
2120582min 119870119901
]]]
]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119875
120578
+1
2119879119903(119879
119865minus1
) +1
2119879119903(119879
119877minus1
)
(46)
with 120578 = [ e tanh(120574e) ]119879If 119875 is positive definite then the function 119880(119905 e e) is
globally positive definite and radially unbounded By usingSylvesterrsquos Theorem the sufficient and necessary conditionfor 119875 to be positive definite is
0 lt 120572 lt
radic120574minus1120582min 119870119901 120582min 119872
120582max 119872 (47)
Next step in the proof is to compute the time derivative of119880(119905 e e) along the closed-loop system trajectories (40) and(32) Thus we have that
(119905 e e) = minus e119879 [119870119889+ 119865V] e minus r119879h + r119879 [120596 minus Δ sign (r)]
+ 120572120574e119879119872Sech2 (120574e) e + 120572 tanh (120574e)119879119862119879e
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
(48)
6 The Scientific World Journal
which was obtained thanks to the property (6) the robotmodel properties (16)-(17) and the facts
Tr (119879r119879) = Tr (r119879119879)
Tr (1198791015840119879x119889r119879) = Tr (r1198791198791015840119879x
119889)
Tr (119879x119889r1198791198791015840) = Tr (r1198791198791015840119879x
119889)
(49)
An upper bound on each term of (119905 e e) is computed asfollows
minuse119879 [119870119889+ 119865V] e le minus120582min 119870119889 + 119865V e
minusr119879h le 120572119896ℎ2
1003817100381710038171003817tanh (120574e)10038171003817100381710038172
+ [120572119896ℎ1+ 119896ℎ2]1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e + 119896ℎ1e2
r119879 [120596 minus Δ sign (r)] le minus [120582min Δ minus 119896120596]119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816
120572120574e119879119872 Sech2 (120574e) e le 120572120574120582max 119872 e2
120572 tanh (120574e)119879119862119879e le 12057211989611986211205832
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 e
+ 1205721198961198621radic119899e2
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
le 120572120582max 119870119889 + 119865V1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
le minus120572120582min 1198701199011003817100381710038171003817tanh (120574e)
10038171003817100381710038172
(50)
where the property of the residual dynamics h in (19)assumption (42) property (8) property (15) and the fact that q le 120583
2+ e with 120583
2defined in (22) were used
With the computed bounds on each term of (119905 e e) wecan write
(119905 e e) le minusp11987911198761p1minus [120582min Δ minus 119896120596]
119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816 (51)
where
p1= [
1003817100381710038171003817tanh (120574e)1003817100381710038171003817
e ] (52)
1198761=[[
[
120572119886 minus1
2[120572119889 + 119890]
minus1
2[120572119889 + 119890] 119887 minus 120572119888
]]
]
(53)
with119886 = 120582min 119870119901 minus 119896ℎ2
119887 = 120582min 119870119889 + 119865V minus 119896ℎ1
119888 = 120574120582max 119872 + 1198961198621radic119899
119889 = 119896ℎ2+ 11989611986211205832+ 120582max 119870119889 + 119865V
119890 = 119896ℎ1
(54)
It is easy to observe that if 1198761in (53) is positive definite
and if
120582min Δ gt 119896120596 (55)
with 119896120596defined in (42) then the function (119905 e e) is negative
semidefinite Besides notice that the matrix1198761in (53) can be
rewritten as
1198761= 119876119886+ 119876119887 (56)
where
119876119886=[[[
[
1
2120572119886 minus
1
2120572119889
minus1
2120572119889
1
2[119887 minus 2120572119888]
]]]
]
119876119887=[[[
[
1
2120572119886 minus
1
2119890
minus1
2119890
1
2119887
]]]
]
(57)
If 119876119886and 119876
119887are positive definite then 119876
1is also positive
definite By applying Sylvesterrsquos criterion the matrix 119876119886is
positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
120572 lt119887
2119888997904rArr 120582min 119870119889 + 119865V gt 119896
ℎ1
120572 lt119886119887
2119886119887 + 1198892
(58)
while 119876119887is positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
119887 gt 0 997904rArr 120582min 119870119889 + 119865V gt 119896ℎ1
120572 gt1198902
119886119887
(59)
Therefore the selection of large enough control gains Δ119870119901and119870
119889guarantee the existence of 120572 satisfying (43) so that
the function 119880(119905 e e) in (45) is positive definite and radiallyunbounded and (119905 e e) in (48) is a negative semidefinitefunction Hence the trajectories e(119905) e(119905) (119905) and (119905)
of the overall closed-loop system (40)-(32) are uniformlybounded
By integrating both sides of (51) it is possible to prove that
int
119905
0
1003817100381710038171003817p1(120588)10038171003817100381710038172
119889120588 le119880 (0 e (0) e (0))
120582min 1198761 (60)
where p1(119905) is defined in (52) Then by invoking Barbalatrsquos
lemma [31] the limit (44) is assured
The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 The Scientific World Journal
first and second time derivative The residual dynamics (18)satisfies the following inequality [27]
h (119905 e e) le 119896ℎ1e + 119896
ℎ2
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 (19)
where 119896ℎ1
and kℎ1
are sufficiently large strictly positiveconstants that depend on the robot model parameters and120574 gt 0
24 Control Goal Let us define the joint position trackingerror as
e (119905) = q119889(119905) minus q (119905) (20)
where q119889(119905) isin R119899 denotes the desired joint position
trajectory The estimated weight errors are defined as
= 119882 minus
= 119881 minus (21)
where119881 isin R[119873+1]times119871 are the ideal input weights isin R[119873+1]times119871
is an estimation of the input weights119882 isin R119871times119899 are the idealoutput weights and isin R119871times119899 is an estimation of the outputweights
The desired time-varying trajectory q119889(119905) is assumed to
be three times differentiable and bounded for all time 119905 ge 0
in the sense1003817100381710038171003817q119889 (119905)
1003817100381710038171003817 le 1205831
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205832
1003817100381710038171003817q119889 (119905)1003817100381710038171003817 le 1205833
(22)
where 1205831 1205832 and 120583
3denote known positive constants
The control problem consists in designing a controller120591(119905) and update laws for the estimated weights (119905) and (119905)
such that the signals e(119905) e(119905) (119905) and (119905) are uniformlybounded In addition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (23)
should be satisfied
3 Proposed Adaptive Neuronal NetworkCompensation Controller
The proposed controller has a structure of a nonlinearPD controller plus adaptive neural network feedforwardcompensation The design of the controller departs from theassumption that the desired torque can be approached by aneural network and then it can be estimated on-line bymeansof proper adaptation laws for the input and output neuralnetwork weights
31 Proposed Scheme The development of the proposedapproach is presented in a constructive form First let usconsider the robot dynamics (13) evaluated along the desiredposition q
119889isin R119899 such that the desired torque 120591
119889isin R119899 can be
founded by
119872(q119889) q119889+ 119862 (q
119889 q119889) q119889+ g (q
119889) + 119865Vq119889 = 120591119889 (24)
by combining (13) and (24) and using the tracking errordefined in (20) the following equation is obtained
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve = 120591119889 minus 120591 (25)
where h(119905 e e) isin R119899 is the so-called residual dynamics [2930] defined by (18)
By using the universal approximation property of theneural networks in (10) the desired torque in (24) can beapproached as
120591119889= 119882119879
120590 (119881119879x119889) + 120598 (26)
where
x119889= [q119879119889q119879119889q1198791198891]119879
isin R119873+1 (27)
is the vector of input signals to the neural network Noticethat in this case119873 = 3119899
Now we are in position to introduce the followingtracking controller
120591 = 119879
120590 (119879x119889) + 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (28)
where 119870119901 119870119889 and Δ are diagonal positive definite matrices
120574 is a positive scalar is the estimated input weight is theestimated output weight
r = e + 120572 tanh (120574e) (29)
sign (r) = [sign (1199031) sdot sdot sdot sign (119903
119899)]119879
isin R119899
(30)
with
sign (119909) =
1 for 119909 gt 0
0 for 119909 = 0
minus1 for 119909 lt 0
(31)
The proposed update laws for the estimated input andoutput weights denoted as and respectively are
119881 = 119877x
119889r1198791015840 (32)
119882 = 119865r119879 minus 1198651015840119879x
119889r119879 (33)
where 119877 isin R[119873+1]times[119873+1] and 119865 isin R119871times119871 are positive definitematrices = 120590(119879x
119889) and
1015840
=120597120590 (x)120597x
(34)
with 119879x119889
32 Closed-Loop SystemDerivation By substituting (26) and(28) in (25) the equation
119872(q) e + 119862 (q q) e + h (119905 e e) + 119865Ve
= minus119870119901tanh (120574e) minus 119870
119889e
minus Δ sign (r) + 119882119879120590 (119881119879x119889) minus
119879
120590 (119879x119889) + 120598
(35)
The Scientific World Journal 5
is obtained The weight error is defined as in (21) and
= 120590 minus = 120590 (119881119879x119889) minus 120590 (
119879x119889) (36)
Multilayered neural networks are nonlinear in the weights 119881and Taylorrsquos series can be used to approximate the activationfunction 120590 Thus
120590 (119881119879x119889) = 120590 (
119879x119889) + 1205901015840
(119879x119889) 119879x119889+ 119874(
119879x119889)2
(37)
where119874(119879x119889)2 represents the higher order terms Approxi-
mation of activation function via Taylorrsquos series has been usedin for example [1 3] Therefore substituting (21) and (37) in(35) and simplifying we obtain the following expression
119872e = minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+ 119879
120590 + 120596 (119905)
(38)
where119872 = 119872(q) h = h(e e) 119862 = 119862(q q) and
120596 (119905) = 119879
1015840
119881119879x119889+119882119874
2
+ 120598 (39)
with 1198742 = 119874(119879x119889)2
Finally the dynamics of [e119879 e119879]119879 isin R2119899 is given by
119889
119889119905e = e
119889
119889119905e = 119872
minus1
[minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+119879
+ 120596 (119905)]
(40)
By using the definition of the weight errors (21) we canrewrite the proposed update laws (32)-(33) as
119889
119889119905 = minus119877x
119889r1198791198821015840 + 119877x
119889r1198791015840
119889
119889119905 = minus 119865r119879 + 1198651015840119881119879x
119889r119879
minus 1198651015840
119879x119889r119879
(41)
The overall closed-loop system is given by (40) and (41)
33 Convergence Analysis The assumption
119896120596ge 120596 (119905) forall119905 ge 0 (42)
with 119896120596gt 0 and 120596(119905) defined in (39) will be used in the next
Concerning the trajectories of the closed-loop system(40)-(32) we have the following result
Proposition 1 One assumes that the desired trajectory q119889(119905) is
bounded as (22) Then provided that 120582min119870119901 120582min119870119889 and120582minΔ are sufficiently large there always exist strictly positiveconstants 120572lowastmax and 120572
lowast
min such that
120572lowast
min lt 120572 lt 120572lowast
max (43)
guarantees that the trajectories e(119905) e(119905) (119905) and (119905) of theoverall closed-loop system (40)-(32) are uniformly bounded Inaddition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (44)
is satisfied
Proof Let us consider the function
119880 (119905 e e) = 1
2e119879119872e +
119899
sum
119894=1
119870119901119894120574minus1 ln (cosh (120574e
119894))
+ 120572 tanh (120574e)119879119872e + 1
2119879119903(119879
119865minus1
)
+1
2119879119903(119879
119877minus1
)
(45)
which is positive definite in terms of the state space of theclosed-loop system (40)-(32)
By using property (9) a lower bound on 119880(119905 e e) can becomputed as follows
119880 (119905 e e) ge 120578119879[[[
[
1
2120582min 119872 minus
120572
2120582max 119872
minus120572
2120582max 119872
120574minus1
2120582min 119870119901
]]]
]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119875
120578
+1
2119879119903(119879
119865minus1
) +1
2119879119903(119879
119877minus1
)
(46)
with 120578 = [ e tanh(120574e) ]119879If 119875 is positive definite then the function 119880(119905 e e) is
globally positive definite and radially unbounded By usingSylvesterrsquos Theorem the sufficient and necessary conditionfor 119875 to be positive definite is
0 lt 120572 lt
radic120574minus1120582min 119870119901 120582min 119872
120582max 119872 (47)
Next step in the proof is to compute the time derivative of119880(119905 e e) along the closed-loop system trajectories (40) and(32) Thus we have that
(119905 e e) = minus e119879 [119870119889+ 119865V] e minus r119879h + r119879 [120596 minus Δ sign (r)]
+ 120572120574e119879119872Sech2 (120574e) e + 120572 tanh (120574e)119879119862119879e
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
(48)
6 The Scientific World Journal
which was obtained thanks to the property (6) the robotmodel properties (16)-(17) and the facts
Tr (119879r119879) = Tr (r119879119879)
Tr (1198791015840119879x119889r119879) = Tr (r1198791198791015840119879x
119889)
Tr (119879x119889r1198791198791015840) = Tr (r1198791198791015840119879x
119889)
(49)
An upper bound on each term of (119905 e e) is computed asfollows
minuse119879 [119870119889+ 119865V] e le minus120582min 119870119889 + 119865V e
minusr119879h le 120572119896ℎ2
1003817100381710038171003817tanh (120574e)10038171003817100381710038172
+ [120572119896ℎ1+ 119896ℎ2]1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e + 119896ℎ1e2
r119879 [120596 minus Δ sign (r)] le minus [120582min Δ minus 119896120596]119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816
120572120574e119879119872 Sech2 (120574e) e le 120572120574120582max 119872 e2
120572 tanh (120574e)119879119862119879e le 12057211989611986211205832
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 e
+ 1205721198961198621radic119899e2
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
le 120572120582max 119870119889 + 119865V1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
le minus120572120582min 1198701199011003817100381710038171003817tanh (120574e)
10038171003817100381710038172
(50)
where the property of the residual dynamics h in (19)assumption (42) property (8) property (15) and the fact that q le 120583
2+ e with 120583
2defined in (22) were used
With the computed bounds on each term of (119905 e e) wecan write
(119905 e e) le minusp11987911198761p1minus [120582min Δ minus 119896120596]
119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816 (51)
where
p1= [
1003817100381710038171003817tanh (120574e)1003817100381710038171003817
e ] (52)
1198761=[[
[
120572119886 minus1
2[120572119889 + 119890]
minus1
2[120572119889 + 119890] 119887 minus 120572119888
]]
]
(53)
with119886 = 120582min 119870119901 minus 119896ℎ2
119887 = 120582min 119870119889 + 119865V minus 119896ℎ1
119888 = 120574120582max 119872 + 1198961198621radic119899
119889 = 119896ℎ2+ 11989611986211205832+ 120582max 119870119889 + 119865V
119890 = 119896ℎ1
(54)
It is easy to observe that if 1198761in (53) is positive definite
and if
120582min Δ gt 119896120596 (55)
with 119896120596defined in (42) then the function (119905 e e) is negative
semidefinite Besides notice that the matrix1198761in (53) can be
rewritten as
1198761= 119876119886+ 119876119887 (56)
where
119876119886=[[[
[
1
2120572119886 minus
1
2120572119889
minus1
2120572119889
1
2[119887 minus 2120572119888]
]]]
]
119876119887=[[[
[
1
2120572119886 minus
1
2119890
minus1
2119890
1
2119887
]]]
]
(57)
If 119876119886and 119876
119887are positive definite then 119876
1is also positive
definite By applying Sylvesterrsquos criterion the matrix 119876119886is
positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
120572 lt119887
2119888997904rArr 120582min 119870119889 + 119865V gt 119896
ℎ1
120572 lt119886119887
2119886119887 + 1198892
(58)
while 119876119887is positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
119887 gt 0 997904rArr 120582min 119870119889 + 119865V gt 119896ℎ1
120572 gt1198902
119886119887
(59)
Therefore the selection of large enough control gains Δ119870119901and119870
119889guarantee the existence of 120572 satisfying (43) so that
the function 119880(119905 e e) in (45) is positive definite and radiallyunbounded and (119905 e e) in (48) is a negative semidefinitefunction Hence the trajectories e(119905) e(119905) (119905) and (119905)
of the overall closed-loop system (40)-(32) are uniformlybounded
By integrating both sides of (51) it is possible to prove that
int
119905
0
1003817100381710038171003817p1(120588)10038171003817100381710038172
119889120588 le119880 (0 e (0) e (0))
120582min 1198761 (60)
where p1(119905) is defined in (52) Then by invoking Barbalatrsquos
lemma [31] the limit (44) is assured
The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 5
is obtained The weight error is defined as in (21) and
= 120590 minus = 120590 (119881119879x119889) minus 120590 (
119879x119889) (36)
Multilayered neural networks are nonlinear in the weights 119881and Taylorrsquos series can be used to approximate the activationfunction 120590 Thus
120590 (119881119879x119889) = 120590 (
119879x119889) + 1205901015840
(119879x119889) 119879x119889+ 119874(
119879x119889)2
(37)
where119874(119879x119889)2 represents the higher order terms Approxi-
mation of activation function via Taylorrsquos series has been usedin for example [1 3] Therefore substituting (21) and (37) in(35) and simplifying we obtain the following expression
119872e = minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+ 119879
120590 + 120596 (119905)
(38)
where119872 = 119872(q) h = h(e e) 119862 = 119862(q q) and
120596 (119905) = 119879
1015840
119881119879x119889+119882119874
2
+ 120598 (39)
with 1198742 = 119874(119879x119889)2
Finally the dynamics of [e119879 e119879]119879 isin R2119899 is given by
119889
119889119905e = e
119889
119889119905e = 119872
minus1
[minush minus 119862e minus 119870119901tanh (120574e) minus [119870
119889+ 119865V] e
minus Δ sign (r) + 1198791015840119879x119889minus 119879
1015840
119879x119889
+119879
+ 120596 (119905)]
(40)
By using the definition of the weight errors (21) we canrewrite the proposed update laws (32)-(33) as
119889
119889119905 = minus119877x
119889r1198791198821015840 + 119877x
119889r1198791015840
119889
119889119905 = minus 119865r119879 + 1198651015840119881119879x
119889r119879
minus 1198651015840
119879x119889r119879
(41)
The overall closed-loop system is given by (40) and (41)
33 Convergence Analysis The assumption
119896120596ge 120596 (119905) forall119905 ge 0 (42)
with 119896120596gt 0 and 120596(119905) defined in (39) will be used in the next
Concerning the trajectories of the closed-loop system(40)-(32) we have the following result
Proposition 1 One assumes that the desired trajectory q119889(119905) is
bounded as (22) Then provided that 120582min119870119901 120582min119870119889 and120582minΔ are sufficiently large there always exist strictly positiveconstants 120572lowastmax and 120572
lowast
min such that
120572lowast
min lt 120572 lt 120572lowast
max (43)
guarantees that the trajectories e(119905) e(119905) (119905) and (119905) of theoverall closed-loop system (40)-(32) are uniformly bounded Inaddition the limit
lim119905rarrinfin
[e (119905)e (119905)] = 0 (44)
is satisfied
Proof Let us consider the function
119880 (119905 e e) = 1
2e119879119872e +
119899
sum
119894=1
119870119901119894120574minus1 ln (cosh (120574e
119894))
+ 120572 tanh (120574e)119879119872e + 1
2119879119903(119879
119865minus1
)
+1
2119879119903(119879
119877minus1
)
(45)
which is positive definite in terms of the state space of theclosed-loop system (40)-(32)
By using property (9) a lower bound on 119880(119905 e e) can becomputed as follows
119880 (119905 e e) ge 120578119879[[[
[
1
2120582min 119872 minus
120572
2120582max 119872
minus120572
2120582max 119872
120574minus1
2120582min 119870119901
]]]
]⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟⏟
119875
120578
+1
2119879119903(119879
119865minus1
) +1
2119879119903(119879
119877minus1
)
(46)
with 120578 = [ e tanh(120574e) ]119879If 119875 is positive definite then the function 119880(119905 e e) is
globally positive definite and radially unbounded By usingSylvesterrsquos Theorem the sufficient and necessary conditionfor 119875 to be positive definite is
0 lt 120572 lt
radic120574minus1120582min 119870119901 120582min 119872
120582max 119872 (47)
Next step in the proof is to compute the time derivative of119880(119905 e e) along the closed-loop system trajectories (40) and(32) Thus we have that
(119905 e e) = minus e119879 [119870119889+ 119865V] e minus r119879h + r119879 [120596 minus Δ sign (r)]
+ 120572120574e119879119872Sech2 (120574e) e + 120572 tanh (120574e)119879119862119879e
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
(48)
6 The Scientific World Journal
which was obtained thanks to the property (6) the robotmodel properties (16)-(17) and the facts
Tr (119879r119879) = Tr (r119879119879)
Tr (1198791015840119879x119889r119879) = Tr (r1198791198791015840119879x
119889)
Tr (119879x119889r1198791198791015840) = Tr (r1198791198791015840119879x
119889)
(49)
An upper bound on each term of (119905 e e) is computed asfollows
minuse119879 [119870119889+ 119865V] e le minus120582min 119870119889 + 119865V e
minusr119879h le 120572119896ℎ2
1003817100381710038171003817tanh (120574e)10038171003817100381710038172
+ [120572119896ℎ1+ 119896ℎ2]1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e + 119896ℎ1e2
r119879 [120596 minus Δ sign (r)] le minus [120582min Δ minus 119896120596]119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816
120572120574e119879119872 Sech2 (120574e) e le 120572120574120582max 119872 e2
120572 tanh (120574e)119879119862119879e le 12057211989611986211205832
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 e
+ 1205721198961198621radic119899e2
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
le 120572120582max 119870119889 + 119865V1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
le minus120572120582min 1198701199011003817100381710038171003817tanh (120574e)
10038171003817100381710038172
(50)
where the property of the residual dynamics h in (19)assumption (42) property (8) property (15) and the fact that q le 120583
2+ e with 120583
2defined in (22) were used
With the computed bounds on each term of (119905 e e) wecan write
(119905 e e) le minusp11987911198761p1minus [120582min Δ minus 119896120596]
119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816 (51)
where
p1= [
1003817100381710038171003817tanh (120574e)1003817100381710038171003817
e ] (52)
1198761=[[
[
120572119886 minus1
2[120572119889 + 119890]
minus1
2[120572119889 + 119890] 119887 minus 120572119888
]]
]
(53)
with119886 = 120582min 119870119901 minus 119896ℎ2
119887 = 120582min 119870119889 + 119865V minus 119896ℎ1
119888 = 120574120582max 119872 + 1198961198621radic119899
119889 = 119896ℎ2+ 11989611986211205832+ 120582max 119870119889 + 119865V
119890 = 119896ℎ1
(54)
It is easy to observe that if 1198761in (53) is positive definite
and if
120582min Δ gt 119896120596 (55)
with 119896120596defined in (42) then the function (119905 e e) is negative
semidefinite Besides notice that the matrix1198761in (53) can be
rewritten as
1198761= 119876119886+ 119876119887 (56)
where
119876119886=[[[
[
1
2120572119886 minus
1
2120572119889
minus1
2120572119889
1
2[119887 minus 2120572119888]
]]]
]
119876119887=[[[
[
1
2120572119886 minus
1
2119890
minus1
2119890
1
2119887
]]]
]
(57)
If 119876119886and 119876
119887are positive definite then 119876
1is also positive
definite By applying Sylvesterrsquos criterion the matrix 119876119886is
positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
120572 lt119887
2119888997904rArr 120582min 119870119889 + 119865V gt 119896
ℎ1
120572 lt119886119887
2119886119887 + 1198892
(58)
while 119876119887is positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
119887 gt 0 997904rArr 120582min 119870119889 + 119865V gt 119896ℎ1
120572 gt1198902
119886119887
(59)
Therefore the selection of large enough control gains Δ119870119901and119870
119889guarantee the existence of 120572 satisfying (43) so that
the function 119880(119905 e e) in (45) is positive definite and radiallyunbounded and (119905 e e) in (48) is a negative semidefinitefunction Hence the trajectories e(119905) e(119905) (119905) and (119905)
of the overall closed-loop system (40)-(32) are uniformlybounded
By integrating both sides of (51) it is possible to prove that
int
119905
0
1003817100381710038171003817p1(120588)10038171003817100381710038172
119889120588 le119880 (0 e (0) e (0))
120582min 1198761 (60)
where p1(119905) is defined in (52) Then by invoking Barbalatrsquos
lemma [31] the limit (44) is assured
The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 The Scientific World Journal
which was obtained thanks to the property (6) the robotmodel properties (16)-(17) and the facts
Tr (119879r119879) = Tr (r119879119879)
Tr (1198791015840119879x119889r119879) = Tr (r1198791198791015840119879x
119889)
Tr (119879x119889r1198791198791015840) = Tr (r1198791198791015840119879x
119889)
(49)
An upper bound on each term of (119905 e e) is computed asfollows
minuse119879 [119870119889+ 119865V] e le minus120582min 119870119889 + 119865V e
minusr119879h le 120572119896ℎ2
1003817100381710038171003817tanh (120574e)10038171003817100381710038172
+ [120572119896ℎ1+ 119896ℎ2]1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e + 119896ℎ1e2
r119879 [120596 minus Δ sign (r)] le minus [120582min Δ minus 119896120596]119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816
120572120574e119879119872 Sech2 (120574e) e le 120572120574120582max 119872 e2
120572 tanh (120574e)119879119862119879e le 12057211989611986211205832
1003817100381710038171003817tanh (120574e)1003817100381710038171003817 e
+ 1205721198961198621radic119899e2
minus 120572 tanh (120574e)119879 [119870119889+ 119865V] e
le 120572120582max 119870119889 + 119865V1003817100381710038171003817tanh (120574e)
1003817100381710038171003817 e
minus 120572 tanh (120574e)119879119870119901tanh (120574e)
le minus120572120582min 1198701199011003817100381710038171003817tanh (120574e)
10038171003817100381710038172
(50)
where the property of the residual dynamics h in (19)assumption (42) property (8) property (15) and the fact that q le 120583
2+ e with 120583
2defined in (22) were used
With the computed bounds on each term of (119905 e e) wecan write
(119905 e e) le minusp11987911198761p1minus [120582min Δ minus 119896120596]
119899
sum
119894=1
10038161003816100381610038161199031198941003816100381610038161003816 (51)
where
p1= [
1003817100381710038171003817tanh (120574e)1003817100381710038171003817
e ] (52)
1198761=[[
[
120572119886 minus1
2[120572119889 + 119890]
minus1
2[120572119889 + 119890] 119887 minus 120572119888
]]
]
(53)
with119886 = 120582min 119870119901 minus 119896ℎ2
119887 = 120582min 119870119889 + 119865V minus 119896ℎ1
119888 = 120574120582max 119872 + 1198961198621radic119899
119889 = 119896ℎ2+ 11989611986211205832+ 120582max 119870119889 + 119865V
119890 = 119896ℎ1
(54)
It is easy to observe that if 1198761in (53) is positive definite
and if
120582min Δ gt 119896120596 (55)
with 119896120596defined in (42) then the function (119905 e e) is negative
semidefinite Besides notice that the matrix1198761in (53) can be
rewritten as
1198761= 119876119886+ 119876119887 (56)
where
119876119886=[[[
[
1
2120572119886 minus
1
2120572119889
minus1
2120572119889
1
2[119887 minus 2120572119888]
]]]
]
119876119887=[[[
[
1
2120572119886 minus
1
2119890
minus1
2119890
1
2119887
]]]
]
(57)
If 119876119886and 119876
119887are positive definite then 119876
1is also positive
definite By applying Sylvesterrsquos criterion the matrix 119876119886is
positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
120572 lt119887
2119888997904rArr 120582min 119870119889 + 119865V gt 119896
ℎ1
120572 lt119886119887
2119886119887 + 1198892
(58)
while 119876119887is positive definite if
119886 gt 0 997904rArr 120582min 119870119901 gt 119896ℎ2
119887 gt 0 997904rArr 120582min 119870119889 + 119865V gt 119896ℎ1
120572 gt1198902
119886119887
(59)
Therefore the selection of large enough control gains Δ119870119901and119870
119889guarantee the existence of 120572 satisfying (43) so that
the function 119880(119905 e e) in (45) is positive definite and radiallyunbounded and (119905 e e) in (48) is a negative semidefinitefunction Hence the trajectories e(119905) e(119905) (119905) and (119905)
of the overall closed-loop system (40)-(32) are uniformlybounded
By integrating both sides of (51) it is possible to prove that
int
119905
0
1003817100381710038171003817p1(120588)10038171003817100381710038172
119889120588 le119880 (0 e (0) e (0))
120582min 1198761 (60)
where p1(119905) is defined in (52) Then by invoking Barbalatrsquos
lemma [31] the limit (44) is assured
The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 7
(a) (b)
Figure 1 Experimental horizontal two-degree-of-freedom robot manipulator
0 5 10 15
minus1
0
1
Time (s)
qd1(t)
(rad
)
(a)
qd2(t)
(rad
)
0 5 10 15Time (s)
minus1
0
1
(b)
Figure 2 Desired joint trajectories 1199021198891(119905) and 119902
1198892(119905) used in the real-time evaluations
4 Experimental Results
Two sets of experiments in different experimental set-upshave been carried out in order to assess the performance ofthe proposed adaptive neural network controller (28) and(32)-(33) The used experimental systems are
(i) a horizontal two-degree-of-freedom arm
(ii) a vertical one-degree-of-freedom arm which isaffected by the gravitational force
In each set of experiments the applied torque (28) is imple-mented with and without adaptive neural network compen-sation The purpose of the experiments is to show the benefitof the adaptive neural network feedforward compensation
41 Planar Two-Degree-of-Freedom Robot To carry outexperiments a planar two-degree-of-freedom direct-drivenarm has been used See Figure 1 for a CAD drawing andpicture The system is composed by two DC Pittmanmotorsoperated in currentmodewith twoAdvancedMotionControlsservo amplifiers A Sensoray 626 IO card is used to readencoder signals with quadrature included and to transfercontrol commands through the DA channels A PC runningWindows XP Matlab Simulink and Real-Time Windows
Target is used to execute controllers in real time at 1 [kHz]sampling rate
Two experiments have been conducted corresponding tothe implementation of a nonlinear PD controller which doesnot consider any adaptation and the proposed adaptive neuralnetwork-based controller in (28)
In reference to Tables 1 and 2 and the model (13) theelements of the experimental robot model are
119872(q) = [
[
1205791+ 21205792cos (119902
2) 1205793+ 1205792cos (119902
2)
1205793+ 1205792cos (119902
2) 120579
3
]
]
119862 (q q) = [
[
minus1205792sin (1199022) 1199022minus1205792sin (1199022) [ 1199021+ 1199022]
1205792sin (1199022) 1199021
0
]
]
119865V = diag 1205794 1205795
g (q) = 0
(61)
It is noteworthy that the robot is moving in the horizontalplane whereby the vector of gravitational forces is nullTable 2 shows a numerical estimation of the parameters120579119894isin R which was obtained by using the filtered dynamic
model and the classical least-squares identification method
8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 The Scientific World Journal
minus05
0
05Applied torque 1205911 (t)
(Nm
)
0 5 10 15Time (s)
(a)
Applied torque 1205912 (t)
minus02
minus01
00102
0 5 10 15Time (s)
(Nm
)
(b)
Figure 3 Applied torque by using the PD + Δ sign (r) scheme which does not consider any adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 4 Tracking errors 1198901(119905) and 119890
2(119905) by using the PD + Δ sign (r) scheme which does not consider any adaptation
see [32 33] The links of the arm are made of aluminum andboth have a length of 015 [m]
411 Desired Trajectory The desired joint velocity trajectorychosen to achieve the experimental tests is given by
q119889(119905) = [
10 cos (20119905)10 cos (40119905)] (62)
It is clear that the desired joint trajectory q119889(119905) satisfies the
bounding assumption (22) See Figure 2 to observe the timeevolution of the desired trajectory (62)
412 Results By removing the adaptive neural networkcompensation in the proposed controller (28) the followingnonlinear PD-type controller is obtained
120591 = 119870119901tanh (120574e) + 119870
119889e + Δ sign (r) (63)
with r defined in (29) Hereafter the controller (63) will bedenoted as PD + Δ sign (r)
The PD + Δ sign (r) controller in (63) has been imple-mented in real time with the following control gains
119870119901= diag 02 01
119870119889= diag 01 001
Δ = diag 005 0005
(64)
and with
120572 = 10 120574 = 50 (65)
Table 1 Physical parameters of the experimental robot arm
Description Notation UnitsLength of link 1 119897
1m
Length of link 2 1198972
mDistance to the center of mass of link 1 119897
1198881m
Distance to the center of mass of link 2 1198971198882
mMass of link 1 119898
1kg
Mass of link 2 1198982
kgInertia rel to center of mass (link 1) 119868
1kg-m2
Inertia rel to center of mass (link 2) 1198682
kg-m2
The results of implementing in real time the PD +Δ sign (r) controller in (63) can be appreciated in Figure 3which shows the time evolution of the applied torques 120591
1(119905)
and 1205912(119905) and in Figure 4 that depicts the time evolution of
the tracking error 1198901(119905) and 119890
2(119905)
On the other hand the new control scheme in (28) willbe referred to as ANN + PD + Δ sign (r)This controller wasimplemented by using 119871 = 20 which is the number ofneurons The neural network requires the input vector
x119889= [1199021198891
1199021198891
11990211988911199021198892
1199021198892
11990211988921]119879
isin R7
(66)
The vector x119889(119905) describes the signals that are used in the
inner layer of the neural networkIn order to establish a fair comparison scenery the control
gains (64) and (65) which were used in the PD + Δ sign (r)
The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 9
minus05
0
05Applied torque 1205911(t)
(Nm
)
0 5 10 15Time (s)
(a)
minus02
minus01
00102
0 5 10 15Time (s)
Applied torque 1205912(t)
(Nm
)
(b)
Figure 5 Applied torque by using the ANN + PD + Δ sign (r) scheme which considers adaptation
minus02minus01
00102
Tracking error e1(t)
(Rad
)
0 5 10 15Time (s)
(a)
Tracking error e2(t)
minus01
minus005
0005
01
0 5 10 15Time (s)
(Rad
)
(b)
Figure 6 Tracking errors 1198901(119905) and 119890
2(119905) by using the ANN + PD + Δ sign (r) scheme which considers adaptation
Table 2 Estimated parameters of the experimental robot arm see(61) for reference
Parameter Definition Value Unit1205791
11989811198972
1198881+ 1198982[1198972
1+ 1198972
1198882] + 1198681+ 1198682
00363 Kgm2
1205792
119898211989711198971198882
00028 Kgm2
1205793
11989821198972
1198882+ 1198682
00023 Kgm2
1205794
119891V1 00084 Nm sec1205795
119891V1 00024 Nm sec
controller in (63) have been used in the real-time implemen-tation of the proposed controller ANN + PD + Δ sign (r) in(28) Besides the gains
119877 = 021198687 119865 = 05119868
20 (67)
with 119868119899meaning the identity matrix of dimension 119899 were
used the adaptation update laws (32) and (33) respectivelyThe results of implementing the proposed controller
ANN + PD + Δ sign (r) in (28) is shown in Figure 5 wherethe time evolution of the applied torques 120591
1(119905) and 120591
2(119905) are
represented and in Figure 6 where the obtained trackingerrors 119890
1(119905) and 119890
2(119905) are described
413 Observations Figures 4 and 6 show the tracking errore(119905) isin R2 for the controller PD + Δ sign (r) in (63)which does not consider adaptation and the new schemeANN + PD + Δ sign (r) in (28) which is based on the adap-tation of neural network From these figures the performanceof the controllers can be assessed
0 5 10 150
002
004
006
008
01
012
014
016
018
02 e(t)
(Rad
)
Time (s)
ANN + PD + Δsign (r)PD + Δsign (r)
Figure 7 Time evolution of the norm of the tracking error e(119905)
For both implementations one can consider a steady statebehavior after 10 [sec] In order to assess the performance ofthe controllers themaximumpeak-to-peak tracking error foreach joint and for each implementation has been computedTable 3 shows the performance of the two controllers wherethe notation PTPV stands for ldquopeak-to-peak valuerdquo We cansee that by using the new controller the tracking performance
10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 The Scientific World Journal
minus01
minus005
0
005
01Estimated output weights W1 (t)
0 5 10 15Time (s)
(a)
minus01
minus005
0
005Estimated output weights W2 (t)
0 5 10 15Time (s)
(b)
Figure 8 Time evolution of the output weights 1(119905) isin R10times1 and
2(119905) isin R10times1
Table 3 Performance of the two controllers maximum peak-to-peak value (PTPV) of the tracking errors after the settling time
Index [rad] PD+Δsign(r) ANN+PD+Δsign(r)max119905ge10
PTPV of 1198901(119905)
(rad) 0260 0046
max119905ge10
PTPV of 1198902(119905)
(rad) 0187 0047
is drastically improved In particular the percentage ofimprovement for joint 1 is 823 and for joint 2 is 749
On other hand Figure 7 shows the norm of the trackingerror e(119905) which is another form to compare the trackingperformance of a controller with respect to the other In thisfigure the improvement in the tracking of the desired trajec-tory by using the ANN + PD + Δ sign (r) scheme in (28) isclearly observed After 10 [sec] the peak value of the e(119905) by using the PD + Δ sign (r) scheme in (63) is 0161 [rad]and by using the ANN + PD + Δ sign (r) controller in (28)is 0035 [rad] Thus the improvement using the new schemeis 783
Finally the output weights 1(119905) isin R10times1 and
2(119905) isin
R10times1 for joints 1 and 2 respectively obtained in the real-timeimplementation of the new controller (28) are observed inFigure 8 A small value of such aweights is enough to improvethe tracking performance drastically
42 Vertical One Degree-of-Freedom Robot This experimen-tal system consists in an Advanced Motion Controls servoamplifier operated in voltage mode and a Nema 34 brusheddirect current motor which has attached a pendulum asshown in Figure 9 Like the two-degree-of-freedom robot adata acquisition board and Matlab were used to implementthe controllers in real time at 1 [kHz] sampling rate
Themodel of this system corresponds to a pendulumwithviscous friction which is actuated by a armature-controlleddirect current motor which can be written as [34]
119872 119902 + 119861 119902 + 119873 sin (119902) = 119868
119871119889119868
119889t+ 119877119868 + 119896
119861119902 = V
(68)
where 119872 119861 119873 119871 119877 and 119896119861are strictly positive constants
119868 denotes the armature current and V is the voltage input
Table 4 Identified parameters of the vertical one degree-of-freedom robot
Parameter Unit EstimationLumped inertia119872 A(s2rad) 00292Lumped viscous friction coefficient 119861 A(srad) 00298Lumped gravitational load119873 A 22387Inductance 119871 H 00031Resistance 119877 Ω 09322Back electromotive force coefficient 119896
119861N(mA) 00246
By using the least-squares identification method we haveestimated the numerical value of the constant parameterswhich are shown in Table 4 Let us notice that themotor shafthas attached a pendulumwhosemass is 0285 [Kg] and lengthis 01803 [m] (equivalent to 71 [in]) from the rotation axis tothe arm tip
The tested controllers corresponds to
V = 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (69)
V = 119879
120590 (119879x119889) + 119896119901tanh (120574119890) + 119896
119889119902 + 120575 sign (119903) (70)
In analogy with experimental tests carried out in the hori-zontal two-degree-of-freedom robot the controller in (69)will be denoted as PD + 120575 sign (119903) while the scheme (70) willbe referred as ANN + PD + 120575 sign (119903) In both controllers119903 = 119890 + 120572 tanh(120574119890) The adaptation signals (119905) and (119905)
in (70) are computed by using the expressions (32) and (32)respectively
The idea is to compare the performance and robustnessof the controllers (69) and (70) in a system affected by thegravitational force and the electrical dynamics of the motor
In this case the model of the system of the robot wasassumed to be unknown whereby the tested controllers weretuned by trial and error until an acceptable performance wasobtained
421 Desired Trajectory The proposed desired trajectory forthis set of experiments was
q119889(119905) = 15 + 2 sin (3119905) [rad] (71)
The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 11
Figure 9 Experimental one-degree-of-freedom arm (pendulum)subject to gravitational force
0 5 10 15 20 25minus1
0
1
2
3
4
Time (s)
qd(t)
(rad
)
Figure 10 Desired joint trajectory 119902119889(119905) the real-time evaluations
Notice that with trajectory the effect of the gravitational forceis maximized Figure 10 shows the time history of the desiredjoint trajectory 119902
119889(119905) in (71)
422 Results Like the case of the experiments with the two-degree-of-freedom robot we have selected the control gainsso that most of the control action is contributed by theadaptive neural network part of the control
Specifically we selected the gains
119896119901= 1 119896
119889= 02
120572 = 15 120574 = 5
(72)
The adaptation of the parameters is given by using (32) and(33) with x
119889= [1 119902
119889119902119889
119902119889]119879
isin R4 and the gains
119877 = 021198684 119865 = 03119868
10 (73)
0 5 10 15 20 25minus2
minus1
0
1
2
3
4
Time (s)
(Vol
ts)
Applied voltage (t)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 11 Experiments with the one degree-of-freedom robotapplied voltage V(119905) for the PD + 120575 sign (119903) and the ANN + PD +120575 sign (119903) controllers
0 5 10 15 20 250
05
1
15
2
25
3|e(t)|
(Rad
)
Time (s)
ANN + PD + 120575sign (r)PD + 120575sign (r)
Figure 12 Experiments with the one degree-of-freedom robotabsolute value of tracking error |119890(119905)| for the PD + 120575 sign (119903) and theANN + PD + 120575 sign (119903) controllers
The proposed adaptive NN controller ANN + PD + 120575
sign (119903) was implemented by using 119871 = 10 neuronsThe results of the implementation of the controllers
PD + 120575 sign (119903) in (69) and ANN + PD + 120575 sign (119903) in (70)are given in Figures 11 and 12 which show the time evolutionof the applied voltage V(119905) and the absolute value of trackingerror |119890(119905)| respectively The advantage of the proposedcontroller inANN + PD + 120575 sign (119903) is clearly observed fromFigure 12 Notice that with the new controller (70) which
12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 The Scientific World Journal
0 5 10 15 20 25minus04
minus03
minus02
minus01
0
01
02
03
04
05
06Estimated input weights V(t)
Time (s)
(a)
0 5 10 15 20 25minus04
minus02
0
02
04
06
08
1
Estimated output weights W(t)
Time (s)
(b)
Figure 13 Experiments with the one degree-of-freedom robot estimated input and output weights for the ANN + PD + 120575 sign (119903) controller
includes the adaptive neural network the absolute valueof the tracking error |119890(119905)| is reduced to values less than008 [rad] after 20 [sec] Finally Figure 13 depicts the esti-mated input and output weights (119905) and (119905) respectivelywhich remain bounded for all time
5 Conclusions
This paper introduced a new adaptive neural network controlalgorithm for the tracking control of robot manipulatorsThe neural network of this controller uses only the desiredjoint position velocity and accelerationThemain theoreticalresult consisted in showing that the position and velocityerror converge asymptotically while the input and outputweights of the neural network remain bounded
The experimental tests showed the benefit of using anadaptive neural network plus nonlinear PD control actionThe new controller showed robustness tomodel uncertaintiesand strong nonlinear effects such as gravitational effects andCoulomb friction
Further research considers the application of the pro-posed ideas in PI joint velocity control [35] anticontrolof chaos [36] output feedback tracking control [37] andunderactuated systems [38]
Conflict of Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by SIP-IPN DGEST PROMEP andCONACYT Project 176587 and 134534 Mexico
References
[1] F L Lewis J Campos and R Selmic Neuro-Fuzzy Controlof Industrial Systems with Actuator Non-Linearities SIAMPhiladelphia Pa USA 2002
[2] R R Selmic and F L Lewis ldquoBacklash compensation in nonlin-ear systems using dynamic inversion by neural networksrdquoAsianJournal of Control vol 2 no 2 pp 76ndash87 2000
[3] C Kwan D M Dawson and F L Lewis ldquoRobust adaptivecontrol of robots using neural network global stabilityrdquo AsianJournal of Control vol 3 no 2 pp 111ndash121 2001
[4] I-CHa andM-CHan ldquoA robust control with a neural networkstructure for uncertain robot manipulatorrdquoKSME InternationalJournal vol 18 no 11 pp 1916ndash1922 2004
[5] W Yu and X Li ldquoPD control of robot with velocity estima-tion and uncertainties compensationrdquo International Journal ofRobotics and Automation vol 21 no 1 pp 1ndash9 2006
[6] L Wang T Chai and Z Fang ldquoNeural-network-based two-loop control of roboticmanipulators including actuator dynam-ics in task spacerdquo Journal of ControlTheory andApplications vol7 no 2 pp 112ndash118 2009
[7] S N Huang K K Tan and T H Lee ldquoAdaptive neural networkalgorithm for control design of rigid-link electrically drivenrobotsrdquo Neurocomputing vol 71 no 4ndash6 pp 885ndash894 2008
[8] M A Moreno-Armendariz C A Perez-Olvera F ORodrıguez and E Rubio ldquoIndirect hierarchical FCMACcontrol for the ball and plate systemrdquo Neurocomputing vol 73no 13 pp 2454ndash2463 2010
[9] M M Fateh and S S Alavi ldquoImpedance control of an activesuspension systemrdquo Mechatronics vol 19 no 1 pp 134ndash1402009
[10] H-S Liu S-Q Zhu and Z-W Chen ldquoSaturated output feed-back tracking control for robot manipulators via fuzzy self-tuningrdquo Journal of Zhejiang University C vol 11 no 12 pp 956ndash966 2010
[11] H Liu K Hao and X Lai ldquoFuzzy saturated output feedbacktracking control for robotmanipulators a singular perturbation
The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 13
theory based approachrdquo International Journal of AdvancedRobotic Systems vol 8 no 4 pp 43ndash53 2011
[12] H-X Li andC L P Chen ldquoThe equivalence between fuzzy logicsystems and feedforward neural networksrdquo IEEE Transactionson Neural Networks vol 11 no 2 pp 356ndash365 2000
[13] T Sun H Pei Y Pan H Zhou and C Zhang ldquoNeural network-based sliding mode adaptive control for robot manipulatorsrdquoNeurocomputing vol 74 no 14-15 pp 2377ndash2384 2011
[14] D Hernandez W Yu and M A Moreno-Armendariz ldquoNeuralPD control with second-order sliding mode compensation forrobot manipulatorsrdquo in Proceedings of the International JointConference on Neural Network (IJCNN rsquo11) pp 2395ndash2402 SanJose Calif USA August 2011
[15] A Izadbakhsh A A Kalat M M Fateh and M R RafieildquoA robust anti-windup control design for electrically drivenrobotsmdashtheory and experimentrdquo International Journal of Con-trol Automation and Systems vol 9 no 5 pp 1005ndash1012 2011
[16] LWang T Chai andC Yang ldquoNeural-network-based contour-ing control for robotic manipulators in operational spacerdquo IEEETransactions on Control Systems Technology vol 20 no 4 pp1073ndash1080 2011
[17] J J Rubio ldquoModified optimal control with a backpropagationnetwork for robotic armsrdquo IET ControlTheory and Applicationsvol 6 no 14 pp 2216ndash2225 2012
[18] J H Perez-Cruz J J Rubio E Ruiz-Velazquez and G Solıs-Perales ldquoTracking control based on recurrent neural networksfor nonlinear systems with multiple inputs and unknowndeadzonerdquo Abstract and Applied Analysis vol 2012 Article ID471281 18 pages 2012
[19] J H Perez Cruz E Ruiz Velazquez J J Rubio andC A de AlbaPadilla ldquoRobust adaptive neurocontrol of siso nonlinear sys-tems preceded by unknow deadzonerdquo Mathematical Problemsin Engineering vol 2012 Article ID 342739 23 pages 2012
[20] V Santibanez and R Kelly ldquoGlobal asymptotic stability ofbounded output feedback tracking control for robot manipu-latorsrdquo in Proceedings of the 40th IEEE Conference on Decisionand Control vol 2 pp 1378ndash1379 1999
[21] V Santibanez and R Kelly ldquoPD control with feedforwardcompensation for robot manipulators analysisysis and exper-imentationrdquo Robotica vol 19 no 1 pp 11ndash19 2001
[22] S Puga-Guzman J Moreno-Valenzuela and V SantibanezldquoOn robot motion control via adaptive neural networksrdquo inProceedings of the 9th International Conference on ElectricalEngineering Computing Science and Automatic Control pp 1ndash6 2012
[23] C Meyer Matrix Analysis and Applied Linear Algebra SIAMPhiladelphia Pa USA 2000
[24] F Zhang D M Dawson M S De Queiroz and W E DixonldquoGlobal adaptive output feedback tracking control of robotmanipulatorsrdquo IEEE Transactions on Automatic Control vol 45no 6 pp 1203ndash1208 2000
[25] JMoreno-Valenzuela V Santibanez andR Campa ldquoOn outputfeedback tracking control of robot manipulators with boundedtorque inputrdquo International Journal of Control Automation andSystems vol 6 no 1 pp 76ndash85 2008
[26] L Sciavicco and B Siciliano Modelling and Control of RobotManipulators Springer London UK 2000
[27] R Kelly V Santibanez and A Lorıa Control of Robot Manipu-lators in Joint Space Springer London UK 2005
[28] R M Murray Z Li and S S Sastry A Mathematical Introduc-tion to Robotic Manipulation CRC Press New York NY USA1993
[29] S Arimoto ldquoFundamental problems of robot control part Iinnovations in the realm of robot servo-loopsrdquo Robotica vol13 no 1 pp 19ndash27 1995
[30] S Arimoto ldquoFundamental problems of robot control part II anonlinear circuit theory towards an understanding of dexterousmotionsrdquo Robotica vol 13 no 2 pp 111ndash122 1995
[31] H KhalilNonlinear Systems Prentice Hall Upper Saddle RiverNJ USA 2002
[32] P Logothetis and J Kieffer ldquoOn the identification of therobot dynamics without acceleration measurementsrdquo InternalReport Faculty of Engineering and Information TechnologyAustralian National University 1996 httpciteseerxistpsueduviewdocsummarydoi=1011558716
[33] M Gautier and P Poignet ldquoExtended Kalman filtering andweighted least squares dynamic identification of robotrdquo ControlEngineering Practice vol 9 no 12 pp 1361ndash1372 2001
[34] DMDawson J Hu andT BurgNonlinear Control of ElectricalMaquinery Marcel Dekker New York NY USA 1998
[35] J Moreno-Valenzuela and V Santibanez ldquoRobust saturated PIjoint velocity control for robot manipulatorsrdquo Asian Journal ofControl vol 15 no 1 pp 64ndash79 2013
[36] J Moreno-Valenzuela ldquoAdaptive anti control of chaos for robotmanipulators with experimental evaluationsrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 18 no 1 pp1ndash11 2013
[37] A Yarza V Santibanez and JMoreno-Valenzuela ldquoAn adaptiveoutput feedbackmotion tracking controller for robotmanipula-tors uniform global asymptotic stability and experimentationrdquoInternational Journal of Applied Mathematics and ComputerScience vol 23 no 3 pp 599ndash611 2013
[38] O Garcıa-Alarcon S Puga-Guzman and J Moreno-Valenzuela ldquoOn parameter identification of the Furutapendulumrdquo Procedia Engineering vol 35 pp 77ndash84 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of



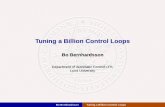
![sem 14 Process Control & Instrumentation part IV Control loops · B.T.S FEE [D. Bord lycée St Michel – 54] sem 14 Process Control & Instrumentation part IV Control loops This chapter](https://static.fdocuments.in/doc/165x107/5e8805758ec81924512801e6/sem-14-process-control-instrumentation-part-iv-control-loops-bts-fee-d.jpg)