
Research Article A Novel Variable Index and Excision CFAR Based Ship Detection...
11
Research Article A Novel Variable Index and Excision CFAR Based Ship Detection Method on SAR Imagery Kefeng Ji, Xiangwei Xing, Huanxin Zou, and Jixiang Sun College of Electronic Science and Engineering, National University of Defense Technology, Changsha, Hunan 410073, China Correspondence should be addressed to Kefeng Ji; [email protected] Received 10 December 2014; Revised 3 March 2015; Accepted 3 March 2015 Academic Editor: Ignacio R. Matias Copyright © 2015 Kefeng Ji et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. When applying the constant false alarm rate (CFAR) detector to ship detection on synthetic aperture radar (SAR) imagery, multiple interferers such as upwelling, breaking waves, ambiguities, and neighboring ships in a dense traffic area will degrade the probability of detection. In this paper, we propose a novel variable index and excision CFAR (VIE-CFAR) based ship detection method to alleviate the masking effect of multiple interferers. Firstly, we improve the variable index (VI) CFAR with an excision procedure, which censors the multiple interferers from the reference cells. And then, the paper integrates the novel CFAR concept into a ship detection scheme on SAR imagery, which adopts the VIE-CFAR to screen reference cells and the distribution to derive detection threshold. Finally, we analyze the performances of the VIE-CFAR under different environments and validate the proposed method on both ENVISAT and TerraSAR-X SAR data. e results demonstrate that the proposed method outperforms other existing detectors, especially in the presence of multiple interferers. 1. Introduction Ship detection filters the peaks among sea clutter to indicate the location of potential ships. With the development of remote sensing technology, ship detection on remote sensing imagery becomes more and more attractive. Among oth- ers, synthetic aperture radar (SAR) sensors are particularly appealing due to the fact that they are independent of atmospheric and meteorological conditions [1, 2]. erefore, ship detection on SAR imagery has received a lot of interests in the past decades [3–6]. To the present date, the European Commission and European Space Agency have jointly initi- ated series of projects [7], such as IMPAST, DECLIMS, and LIMES, to develop efficient and reliable maritime surveillance systems, in which ship detection on SAR imagery is one of the most critical modules. Besides the methods based on wavelet analysis [8] and subaperture correlation [9], constant false alarm rate (CFAR) method is the most popular technique for ship detection on SAR imagery [3]. e CFAR scheme sets the detection threshold adaptively based on the local statistic, which is estimated by processing a group of reference cells surrounding the cell under test (CUT). In a homogeneous environment when the reference cells contain independent and identically distributed samples governed by an expo- nential distribution, it has been shown in [10] that the cell averaging (CA) CFAR can achieve the near optimum perfor- mance. However, the CA-CFAR detector will be deteriorated under nonhomogeneous environments, for example, clutter edges and multiple interferers [11–13]. e nonhomogeneous environments result in either an excessive increase in false alarms or degradation of detection probability. To overcome these problems, alternative CFAR processors are proposed. e great-of (GO), smallest-of (SO), order statistic (OS), and trimmed mean (TM) CFARs are the most representative ones. ese CFAR detectors produce diverse performances under different clutter environments [11]. To exploit the advantages of different CFAR detectors for accommodating the variety of environments, an intelligent CFAR concept based on data variability index (VI) and mean ratio (MR) of the leading and lagging windows, named VI-CFAR, is proposed in [14], which assesses the current environment and switches among the CA-CFAR, GO-CFAR, and SO- CFAR dynamically. e VI-CFAR provides low CFAR loss in homogeneous environments and performs robustly in the presence of clutter edges and properly located multiple Hindawi Publishing Corporation Journal of Sensors Volume 2015, Article ID 437083, 10 pages http://dx.doi.org/10.1155/2015/437083
Transcript of Research Article A Novel Variable Index and Excision CFAR Based Ship Detection...

Research ArticleA Novel Variable Index and Excision CFAR Based ShipDetection Method on SAR Imagery
Kefeng Ji Xiangwei Xing Huanxin Zou and Jixiang Sun
College of Electronic Science and Engineering National University of Defense Technology Changsha Hunan 410073 China
Correspondence should be addressed to Kefeng Ji jikefengnudteducn
Received 10 December 2014 Revised 3 March 2015 Accepted 3 March 2015
Academic Editor Ignacio R Matias
Copyright copy 2015 Kefeng Ji et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
When applying the constant false alarm rate (CFAR) detector to ship detection on synthetic aperture radar (SAR) imagery multipleinterferers such as upwelling breaking waves ambiguities and neighboring ships in a dense traffic area will degrade the probabilityof detection In this paper we propose a novel variable index and excision CFAR (VIE-CFAR) based ship detection method toalleviate the masking effect of multiple interferers Firstly we improve the variable index (VI) CFAR with an excision procedurewhich censors the multiple interferers from the reference cells And then the paper integrates the novel CFAR concept into a shipdetection scheme on SAR imagery which adopts the VIE-CFAR to screen reference cells and the distribution to derive detectionthreshold Finally we analyze the performances of the VIE-CFAR under different environments and validate the proposed methodon both ENVISAT and TerraSAR-X SAR data The results demonstrate that the proposed method outperforms other existingdetectors especially in the presence of multiple interferers
1 Introduction
Ship detection filters the peaks among sea clutter to indicatethe location of potential ships With the development ofremote sensing technology ship detection on remote sensingimagery becomes more and more attractive Among oth-ers synthetic aperture radar (SAR) sensors are particularlyappealing due to the fact that they are independent ofatmospheric and meteorological conditions [1 2] Thereforeship detection on SAR imagery has received a lot of interestsin the past decades [3ndash6] To the present date the EuropeanCommission and European Space Agency have jointly initi-ated series of projects [7] such as IMPAST DECLIMS andLIMES to develop efficient and reliablemaritime surveillancesystems in which ship detection on SAR imagery is one of themost critical modules
Besides the methods based on wavelet analysis [8]and subaperture correlation [9] constant false alarm rate(CFAR) method is the most popular technique for shipdetection on SAR imagery [3] The CFAR scheme sets thedetection threshold adaptively based on the local statisticwhich is estimated by processing a group of reference cellssurrounding the cell under test (CUT) In a homogeneous
environment when the reference cells contain independentand identically distributed samples governed by an expo-nential distribution it has been shown in [10] that the cellaveraging (CA) CFAR can achieve the near optimum perfor-mance However the CA-CFAR detector will be deterioratedunder nonhomogeneous environments for example clutteredges and multiple interferers [11ndash13] The nonhomogeneousenvironments result in either an excessive increase in falsealarms or degradation of detection probability To overcomethese problems alternative CFAR processors are proposedThe great-of (GO) smallest-of (SO) order statistic (OS)and trimmed mean (TM) CFARs are the most representativeones These CFAR detectors produce diverse performancesunder different clutter environments [11] To exploit theadvantages of different CFAR detectors for accommodatingthe variety of environments an intelligent CFAR conceptbased on data variability index (VI) and mean ratio (MR)of the leading and lagging windows named VI-CFAR isproposed in [14] which assesses the current environmentand switches among the CA-CFAR GO-CFAR and SO-CFAR dynamically The VI-CFAR provides low CFAR lossin homogeneous environments and performs robustly inthe presence of clutter edges and properly located multiple
Hindawi Publishing CorporationJournal of SensorsVolume 2015 Article ID 437083 10 pageshttpdxdoiorg1011552015437083
2 Journal of Sensors
VIAA BCUT
VIBWindow selection Excision COM
Target
No target
T
ΣA ΣB
120582 and ΣAB
ΣE
C = CN2 CN CE Σ = ΣA ΣB ΣAB ΣE
Figure 1 Illustration of the VIE-CFAR scheme
interferers However if the interferers are located in bothsides of the reference window the performance of VI-CFARdegrades with the increasing number of interferers
Practical ship detection on SAR imagery often encountersinterferers such as upwelling breaking waves ambiguitiesand neighboring ships in a dense traffic area On theseoccasions when applying the CFAR scheme to ship detectionon SAR imagery the interferers are likely to produce a higherdetection threshold corresponding to the masking effect inthe detection issue To overcome the aforementioned prob-lems we propose a novel variability index and excision CFAR(VIE-CFAR) based ship detection method on SAR imageryThe proposed method firstly incorporates the VI-CFAR withan excision procedure to filter the reference cells And thenwe derive the detection threshold based on the survivedreference cells and1198660 distribution [15]The proposedmethodaddresses the ship detection on SAR imagery in the presenceof multiple interferers and inherits the robust performance ofVI-CFAR in various environments We analyze the proposedmethod under different environments and validate its perfor-mances on both ENVISAT and TerraSAR-X SAR data
The rest of this paper is organized as follows Section 2presents our proposed VIE-CFAR scheme in detail InSection 3 we integrate the VIE-CFAR into a ship detectionflowchart In Section 4 simulation experiments are per-formed in various environments Section 5 conducts thevalidation of the VIE-CFAR for ship detection on ENVISATand TerraSAR-X SAR imagery Finally Section 6 concludesthis paper
2 Description of the VIE-CFAR Scheme
In this paper we present the VIE-CFAR scheme in Figure 1which incorporates the VI-CFARwith an excision procedureThroughout this paper we use the similar notations as in [14]In the VIE-CFAR scheme we check whether a target existsfor each CUT by comparing the CUT 119884 with a threshold119879 If 119884 gt 119879 then a target can be declared to be presentHere the threshold 119879 is decided by the estimated statistic ofthe reference cells 119883
119894| 119894 = 1 2 119873 and a multiplier
constant 119862 In most cases the statistic is estimated as thesumof the reference cells Furthermore in the proposedVIE-CFAR scheme the reference window can be selected as thewholewindow119860119861 the leadingwindow119860 the laggingwindow119861 or the excision window 119864 (results from the whole window119860119861 and an excision parameter 120582) based on the data VI andMR of the leading and lagging windows Correspondingly
the CFAR processor switches among CA-CFAR GO-CFARSO-CFAR and excision-CFAR (E-CFAR) dynamically
21 Definition of VI and MR We adopt the definition of theVI and MR detailed in [14] VI is a second-order statistic andits value is a function of the estimated populationmean andvariance 2 Specifically the VIE-CFAR calculates the VI ofthe leading and lagging window respectively as
VI = 1 + 2
2= 1 +
1
119899 minus 1
119899
sum
119894=1
(119883119894minus 119883)2
(119883)2
(1)
where119883 is the arithmetic mean of the 119899 = 1198732 cells in a halfreference window
In a homogeneous environment the probability densityfunction (PDF) of VI is independent of the noise powerHowever the value of VI changes considerably when clutteredges and interferers are presentTherefore we need to decideif the environment of the half reference window is variable ornonvariable This is done by comparing VI with a threshold119870VI via applying the following hypothesis [14]
VI le 119870VI 997904rArr Non-variable
VI ge 119870VI 997904rArr Variable(2)
TheMR is further defined to determine whether the cellsin the leading and lagging windows come from the sameenvironment or not It is defined as the ratio of the meanvalues of the leading and the lagging window cells denotedby [14]
MR =119883119860
119883119861
=sum119894isin119860
119883119894
sum119894isin119861
119883119894
(3)
in which 119883119860and 119883
119861are the leading and lagging window
means Similar to VI the PDF of MR is independent of thenoise power in a homogeneous environment However thevalue of MR increases when interfering targets and higherpower of clutters are present in the leading window while itdecreases when they are present in the lagging window
To determine whether the means of the leading andlagging windows are the same or not we use the followinghypothesis test by comparing the MR with a threshold 119870MRand its reciprocal [14]
119870minus1
MR le MR le 119870MR 997904rArr Same Means
MR lt 119870minus1
MR or MR gt 119870MR 997904rArr Different Means(4)
22 Window Selection Strategy and Excision Procedure Inthis section we present the window selection strategy of theVIE-CFAR scheme In contrast to the VI-CFAR that selectsdifferent reference windows to estimate the backgroundstatistic based on the VI and MR [14] we improve it byintroducing an excision procedure as shown in Table 1In the case of multiple interfering targets especially whenthe interferers are present in both the leading and lagging
Journal of Sensors 3
Table 1 Multiplier and window selection
Leading windowvariable
Lagging windowvariable Different means VIE-CFAR adaptive
thresholdsEquivalent CFAR
detectorNo No No 119862
119873Σ119860119861
CA-CFARNo No Yes 119862
1198732max (Σ
119860 Σ119861) GO-CFAR
Yes No mdash 1198621198732Σ119861
CA-CFARNo Yes mdash 119862
1198732Σ119860
CA-CFARYes Yes mdash 119862
119864Σ119864
E-CFAR
SAR
imag
es
Prep
roce
ssin
g
Slid
ing
win
dow
VIE-CFAR schemeLeading
Whole window
Excision window
Win
dow
sele
ctio
n
CFAR threshold
Para
met
er es
timat
ion
Thre
shol
d de
rivat
ion
G0
All thepixels are
processedYes
No
Mor
phol
ogic
alpr
oces
sing
Det
ectio
n re
sults
data
window
Laggingwindow
Pfa
Figure 2 Block diagram of the proposed method
windows the VI-CFAR chooses the half window with thesmallest mean and thus results in a loss in detection proba-bility To avoid this drawback we propose to use an excisionprocedure [16] for suppressing the masking effect caused bythe interfering targets The introduced excision procedure isreferred to as E-CFARThis method compares the samples inthe whole window119860119861 with an excision threshold and groupsthe samples that do not exceed the excision threshold into anexcision window denoted by 119864 with the size of 119873
119864 We can
explicitly define the excision window as
119864 = 119883119894| 119883119894le 120582 sum
119894isin119860119861
119883119894 (5)
where 120582 is the excision coefficientHere the value of 120582 is set based on the sumof the reference
cells and an excision probability to ensure the survivedsamples in window 119864 are not variable More specifically weselect the value of 120582 based on the following steps
Firstly we set a relative low excision probability forexample 1119890 minus 6 and accordingly calculate an initial excisioncoefficient 120582(0) (similar to (7) below)
120582(119894)= (119875fa)
minus1119873(119894)
119864 minus 1 119894 = 0 1 2 119872 (6)
in which 119894 denotes the 119894th iteration and 119873(119894)
119864denotes the
number of the survived cells of the 119894th iteration and119873(0)119864
= 119873Secondly we screen the reference cells based on (5) to
obtain the excisionwindow119864 and calculate VI of the survivedreference cells
Thirdly we compare the value ofVIwith119870VI to determinethe variability of 119864 If the window 119864 is variable we increasethe excision probability with a step of 5 times of the initial
value (eg if the initial value is 1119890 minus 6 the step is 5119890 minus 6) andrecalculate a lower 120582
And the second and third steps repeat until the referencecells are not variable With the iteratively calculated 120582 theinterferers can be removed and accordingly the survivedreference cells are in nonvariable environment
Besides the selected subset of reference cells to estimatethe background statistic the VIE-CFAR also determines amultiplier constant to form the adaptive detection thresholdUnder the assumption that the background cells are governedby an exponential distribution we determine the multiplierconstant 119862
119873based on CA-CFAR with reference cells [14]
119862119873= (119875fa)
minus1119873minus 1 (7)
where 119875fa is the predetermined probability of false alarm(PFA) It is worth noting that the number of reference cellsin window 119864 is 119873
119864and the multiplier 119862
119864is calculated from
(6) by replacing119873 with119873119864
3 VIE-CFAR for Ship Detection in SAR Images
Based on theVIE-CFAR scheme described above we proposea VIE-CFAR based ship detection method on SAR imageryFigure 2 illustrates the block diagram of the proposedmethod When applying the VIE-CFAR to ship detectionon SAR imagery we further improve the procedures in thefollowing aspects Firstly we extend the 1D reference windowto a 2D hollow stencil and obtain the reference cells basedon the proposed VIE-CFAR scheme Secondly we adopt the1198660 distribution to describe the statistical characteristic of sea
clutter Thirdly the method estimates the parameters of 1198660distribution and calculates the decision threshold to filterships from sea clutter Finally the CFAR detection results are
4 Journal of Sensors
Reference cells
Guard cells
CUT
(a)
Lead
ing
win
dow
Lagg
ing
win
dow
(b) (c) (d)
Figure 3 Illustration of the 2D stencil (a) the three-layer sliding window (b) leading and lagging window and (c) and (d) variations of thesliding window
postprocessed with morphological operations to cluster andfilter isolated pixels
As the SAR sensor captures the observed area fromboth range and azimuth directions the VIE-CFAR referencewindow for ship detection on SAR image is extended toa two-dimensional hollow stencil as shown in Figure 3(a)The stencil consists of three layers [3] where the centralone concentrates on the pixels under test and the guardwindow protects the target from leaking to the backgroundwindowThe stencil size depends on the image resolution andship target dimensionsThe leading and lagging windows areillustrated in Figure 3(b) Notice that the leading and laggingwindow can be defined as other forms to be more robust toclutter edges as shown in Figures 3(c) and 3(d) Due to thefact that the wave fields present various directions on SARimages (not only limited to horizontal or vertical) the stencilwindow should be designed flexibly to remain consistent withthe wave field direction
The adopted statistical model is another important factorthat impacts ship detection performance on SAR imageryConducted from themultiplicativemodel and the underlyingphysical scattering mechanisms the 119866
0 distribution hasarisen to represent clutters on SAR imagery [15] The PDF ofa random variable119883 that has an amplitude 1198660 distribution isdenoted as
119891119883 (119909) =
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
minus120572 120574 119871 119909 gt 0
(8)
where 119871 denotes the equivalent number of looks (ENL) ofthe amplitude image 120572 is a shape parameter that describesthe spikiness of the clutter 120574 is a scale parameter and Γ(sdot)is the gamma function The 119866
0 distribution is compati-ble with several special cases when the shape parameteradopts different values The exponential distribution is oneof the special cases of 1198660 distribution [17] The parametersare estimated from sea clutters by Mellin kind statistics[18]
Different from the one-dimensional CFAR detection the2D stencil ensures enough reference cells for the estimationof the background statisticsTherefore we estimate the shapeand scale parameters with different reference cells basedon the switch logic in Table 1 And then we directly derive
the detection threshold119879119889for ship detection on SAR imagery
by (8)
119875fa = intinfin
119879119889
119891119883 (119909) 119889119909 = int
infin
119879119889
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
119889119909
(9)
When 119871 = 1 close form of (8) can be derived
119875fa =120572 minus 1
120572120574120572(120574 + 119879
2
119889)120572
(10)
therefore 119879119889is presented as
119879119889= (
120572120574120572
120572 minus 11198751120572
fa minus 120574)
12
(11)
However analytical expression of (8) is difficult to besolved formost cases Once given the PFAwe derive the deci-sion threshold 119879
119889based on (8) with numerical calculations
Ship target is declared to be present if the image pixel valueexceeds the decision threshold
4 Simulation Results and Analysis
In this section we illustrate the performances of VIE-CFARfor the environments of homogeneous clutter edges andmultiple interferers We compare the probability of detection(PD) and the PFA performances of the VIE-CFAR with theexisting CFAR detectors including the CA GO SO OS (119896 =21 119896 is the order of the cell being taken as the estimation oflocal statistic) and VI-CFAR
Due to the lack of analytical expression for the PDF ofVI and the dependence between the VI and MR hypothesistest decisions [14] we apply the Monte-Carlo simulation(119872 = 1 000 000) In these simulations we mainly expect todemonstrate the ability of selecting homogeneous clutter cellsby the VIE-CFAR scheme Therefore we generally assumethe exponential distribution instead of the 1198660 distributionfor background cells and Swerling I fluctuation for the targetand interferers The interferer to noise ratio (INR) equalsthe signal to noise ratio (SNR) The interferers are generatedrandomly and inserted to the appointed cells The clutteredge sweeps from left to right (Window 119860 to Window 119861)with clutter to noise ratio (CNR) as 10 dB The multiplierconstants are calculated from (6) given that the number of
Journal of Sensors 5
reference cells is 119873 = 24 and the designed 119875fa is 1119890 minus 4 Asdescribed in [14] the values of VI and MR are related to theCNR and INR of the variable environments as well as thenumber of reference cellsWe here set them as 476 and 1806respectively The excision coefficient 120582 is calculated throughthe iteration procedure in Section 22 with an initial excisionprobability of 1119890 minus 6
Figure 4 illustrates the various environments of thesimulation including the homogeneous clutter edges andmultiple interferers Note that the clutter and interferer cellsare set to be stable values in Figure 4 It only illustrates therelative position of the clutter edge and interferers
41 Homogeneous Environment Figure 5 shows the PD per-formance in a homogeneous environment for the VIE-CFARalong with results for an optimum detector (with a fixeddetection threshold when the clutter power is known) and forthe CA-CFAR GO-CFAR SO-CFAR OS-CFAR (119896 = 21)and VI-CFAR All of the CFAR detectors perform similarlyand exhibit some CFAR loss relative to the optimumdetectorThe VIE-CFAR performs the same as VI-CFAR and behavessomewhat better than the SO- and OS-CFAR
42 Variable Environment with Clutter Edge In Figure 6 weevaluate the PFA performance of the proposed VIE-CFARunder the condition of clutter edges (as shown in Figures4(b) and 4(c)) Due to the adaptive selection procedureboth the VI-CFAR and VIE-CFAR behave steadily with thedesired PFA Particularly when the number of clutter cellsis more than 1198732 and the cell under test is from the clutterbackground the PFA achieved by the VIE-CFAR and VI-CFAR is superior to the other CFAR processors
43 Variable Environment with Multiple Interferers InFigure 7 we assess the performance of the VIE-CFAR in thepresence of a single interfering target that locates in one halfof the reference windowThe interferer is inserted in the 18thcell (as shown in Figure 4(d)) In this case the performancesof OS-CFAR SO-CFAR VI-CFAR and VIE-CFAR arerelatively unaffected while the performances of CA-CFARandGO-CFAR degrade heavilyThe degradation results fromthe fact that the interferer increases the estimated statisticsand the decision thresholds of the CA-CFAR and GO-CFARWe also observe that the VIE-CFAR and VI-CFAR performnearly the same This result is expected since they switch tothe same reference window in this situationThe small CFARloss in VI-CFAR and VIE-CFAR for low SNR is a resultof errors in the window selection hypothesis As the SNRincreases the VIE-CFAR selects the right reference cells andthe performance approaches to the SO-CFAR and OS-CFAR
In Figure 8 we present multiple interferers that locatein both halves of the reference window In the case oftwo interfering targets (inserted in the 5th and 20th cellsas shown in Figure 4(e)) the VIE-CFAR and OS-CFARretain good performances while the other detectors showperformance degradation The performance degradation ofVI-CFAR validates the necessity of introducing the excisionprocedure when the interfering targets are present in bothhalves of the reference window When the SNR is low
the VIE-CFAR switches not always to the E-CFAR andthe performance is a bit lower than the OS-CFAR As theSNR increases the VIE-CFAR behaves similarly to the OS-CFAR As the number of interfering targets increases to 4 andlocates in both halves of the reference window (the additionaltwo interferers locate at the 7th and 18th cells as shown inFigure 4(f)) the performance of the OS-CFAR shows largedegradation The reason lies in that the value of 119896 in theOS-CFAR is not appropriate to tolerate enough interferingtargets The performance of VIE-CFAR maintains a stablelevel and is robust to the number of interferers
Finally we evaluate the PFA performance of the proposedVIE-CFAR in the presence of multiple interferers FromFigure 9(a) the proposed method controls the PFA withinthe same order of the designed PFA This is because theVIE-CFAR scheme removes the multiple interferers by anexcision procedure and the resulting reference cells are underhomogeneous environments Figure 9(b) illustrates the vari-able index of the resulting reference cells The variable indexis lower than 119870VI and accordingly the detector performs asCA-CFAR with the resulting homogeneous reference cells
5 Validation for Ship Detection onSAR Imagery
Most of the operating ship detection systems such as thesearch for unidentified maritime objects (SUMO) and oceanmonitoring workstation (OMW) are developed from theCA-CFAR detector [3]Therefore we mainly conduct perfor-mance comparisons of the proposed method with the CA-CFAR and VI-CFAR detectors
The proposed VIE-CFAR based ship detection methodis validated on two frames of SAR imagery The first oneis acquired by ENVISAT on wide swath mode centered at3783∘N and 11991∘E (Yellow Sea China) with a resolution
of 125m times 125m in the range and azimuth directionsrespectively The image size is 193 times 228 pixels and contains39 visually inspected ships as shown in Figure 10(a) The seaclutter environment presents clutter edges The other one isacquired by TerraSAR-X over the area of Hong Kong with aresolution of 19mtimes33min the range and azimuth directionrespectively The image size is 739 times 887 pixels and contains41 visually inspected ships as shown in Figure 11(a)The shipsin this image are larger in pixels due to the higher resolutionand some of the ships are located closely Both the ENVISATand TerraSAR-X SAR images are level 2 products
The test guard and background windows of the CFARsliding stencil are set as 1 by 1 7 by 7 and 13 by 13 for theENVISAT image and 1 by 1 15 by 15 and 21 by 21 for theTerraSAR-X image respectively The designed 119875fa is set as00001 In the real SAR imagery the INR and number of refer-ence cells are larger than those in the simulations Thereforewe set the 119870VI and 119870MR as 25 and 1806 empirically Theexcision factor 120582 is determined by the iteration procedure
For the ENVISAT image detection results are illustratedin Figure 10 From Figures 10(b) 10(c) and 10(d) false alarmsare observed for the CA-CFAR VI-CFAR and VIE-CFARand the number of false alarms is 3 2 and 3 respectively Notethat the CFAR detection results are refined by morphological
6 Journal of Sensors
ClutterTarget
(a)
ClutterTarget
(b)
ClutterTarget
(c)
Interferer
ClutterTarget
(d)
Interferer
ClutterTarget
(e)
Interferer
ClutterTarget
(f)
Figure 4 Illustration of the various simulated environments (a) Homogeneous environment (b) clutter edge on the leading window (c)clutter edge on the lagging window (d) one interferer on the lagging window (the 18th cell) (d) two interferers on both halves of the window(the 5th and 20th cells) and (f) four interferers on both halves of the window (the 5th 7th 18th and 20th cells)
Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Sensors
VIAA BCUT
VIBWindow selection Excision COM
Target
No target
T
ΣA ΣB
120582 and ΣAB
ΣE
C = CN2 CN CE Σ = ΣA ΣB ΣAB ΣE
Figure 1 Illustration of the VIE-CFAR scheme
interferers However if the interferers are located in bothsides of the reference window the performance of VI-CFARdegrades with the increasing number of interferers
Practical ship detection on SAR imagery often encountersinterferers such as upwelling breaking waves ambiguitiesand neighboring ships in a dense traffic area On theseoccasions when applying the CFAR scheme to ship detectionon SAR imagery the interferers are likely to produce a higherdetection threshold corresponding to the masking effect inthe detection issue To overcome the aforementioned prob-lems we propose a novel variability index and excision CFAR(VIE-CFAR) based ship detection method on SAR imageryThe proposed method firstly incorporates the VI-CFAR withan excision procedure to filter the reference cells And thenwe derive the detection threshold based on the survivedreference cells and1198660 distribution [15]The proposedmethodaddresses the ship detection on SAR imagery in the presenceof multiple interferers and inherits the robust performance ofVI-CFAR in various environments We analyze the proposedmethod under different environments and validate its perfor-mances on both ENVISAT and TerraSAR-X SAR data
The rest of this paper is organized as follows Section 2presents our proposed VIE-CFAR scheme in detail InSection 3 we integrate the VIE-CFAR into a ship detectionflowchart In Section 4 simulation experiments are per-formed in various environments Section 5 conducts thevalidation of the VIE-CFAR for ship detection on ENVISATand TerraSAR-X SAR imagery Finally Section 6 concludesthis paper
2 Description of the VIE-CFAR Scheme
In this paper we present the VIE-CFAR scheme in Figure 1which incorporates the VI-CFARwith an excision procedureThroughout this paper we use the similar notations as in [14]In the VIE-CFAR scheme we check whether a target existsfor each CUT by comparing the CUT 119884 with a threshold119879 If 119884 gt 119879 then a target can be declared to be presentHere the threshold 119879 is decided by the estimated statistic ofthe reference cells 119883
119894| 119894 = 1 2 119873 and a multiplier
constant 119862 In most cases the statistic is estimated as thesumof the reference cells Furthermore in the proposedVIE-CFAR scheme the reference window can be selected as thewholewindow119860119861 the leadingwindow119860 the laggingwindow119861 or the excision window 119864 (results from the whole window119860119861 and an excision parameter 120582) based on the data VI andMR of the leading and lagging windows Correspondingly
the CFAR processor switches among CA-CFAR GO-CFARSO-CFAR and excision-CFAR (E-CFAR) dynamically
21 Definition of VI and MR We adopt the definition of theVI and MR detailed in [14] VI is a second-order statistic andits value is a function of the estimated populationmean andvariance 2 Specifically the VIE-CFAR calculates the VI ofthe leading and lagging window respectively as
VI = 1 + 2
2= 1 +
1
119899 minus 1
119899
sum
119894=1
(119883119894minus 119883)2
(119883)2
(1)
where119883 is the arithmetic mean of the 119899 = 1198732 cells in a halfreference window
In a homogeneous environment the probability densityfunction (PDF) of VI is independent of the noise powerHowever the value of VI changes considerably when clutteredges and interferers are presentTherefore we need to decideif the environment of the half reference window is variable ornonvariable This is done by comparing VI with a threshold119870VI via applying the following hypothesis [14]
VI le 119870VI 997904rArr Non-variable
VI ge 119870VI 997904rArr Variable(2)
TheMR is further defined to determine whether the cellsin the leading and lagging windows come from the sameenvironment or not It is defined as the ratio of the meanvalues of the leading and the lagging window cells denotedby [14]
MR =119883119860
119883119861
=sum119894isin119860
119883119894
sum119894isin119861
119883119894
(3)
in which 119883119860and 119883
119861are the leading and lagging window
means Similar to VI the PDF of MR is independent of thenoise power in a homogeneous environment However thevalue of MR increases when interfering targets and higherpower of clutters are present in the leading window while itdecreases when they are present in the lagging window
To determine whether the means of the leading andlagging windows are the same or not we use the followinghypothesis test by comparing the MR with a threshold 119870MRand its reciprocal [14]
119870minus1
MR le MR le 119870MR 997904rArr Same Means
MR lt 119870minus1
MR or MR gt 119870MR 997904rArr Different Means(4)
22 Window Selection Strategy and Excision Procedure Inthis section we present the window selection strategy of theVIE-CFAR scheme In contrast to the VI-CFAR that selectsdifferent reference windows to estimate the backgroundstatistic based on the VI and MR [14] we improve it byintroducing an excision procedure as shown in Table 1In the case of multiple interfering targets especially whenthe interferers are present in both the leading and lagging
Journal of Sensors 3
Table 1 Multiplier and window selection
Leading windowvariable
Lagging windowvariable Different means VIE-CFAR adaptive
thresholdsEquivalent CFAR
detectorNo No No 119862
119873Σ119860119861
CA-CFARNo No Yes 119862
1198732max (Σ
119860 Σ119861) GO-CFAR
Yes No mdash 1198621198732Σ119861
CA-CFARNo Yes mdash 119862
1198732Σ119860
CA-CFARYes Yes mdash 119862
119864Σ119864
E-CFAR
SAR
imag
es
Prep
roce
ssin
g
Slid
ing
win
dow
VIE-CFAR schemeLeading
Whole window
Excision window
Win
dow
sele
ctio
n
CFAR threshold
Para
met
er es
timat
ion
Thre
shol
d de
rivat
ion
G0
All thepixels are
processedYes
No
Mor
phol
ogic
alpr
oces
sing
Det
ectio
n re
sults
data
window
Laggingwindow
Pfa
Figure 2 Block diagram of the proposed method
windows the VI-CFAR chooses the half window with thesmallest mean and thus results in a loss in detection proba-bility To avoid this drawback we propose to use an excisionprocedure [16] for suppressing the masking effect caused bythe interfering targets The introduced excision procedure isreferred to as E-CFARThis method compares the samples inthe whole window119860119861 with an excision threshold and groupsthe samples that do not exceed the excision threshold into anexcision window denoted by 119864 with the size of 119873
119864 We can
explicitly define the excision window as
119864 = 119883119894| 119883119894le 120582 sum
119894isin119860119861
119883119894 (5)
where 120582 is the excision coefficientHere the value of 120582 is set based on the sumof the reference
cells and an excision probability to ensure the survivedsamples in window 119864 are not variable More specifically weselect the value of 120582 based on the following steps
Firstly we set a relative low excision probability forexample 1119890 minus 6 and accordingly calculate an initial excisioncoefficient 120582(0) (similar to (7) below)
120582(119894)= (119875fa)
minus1119873(119894)
119864 minus 1 119894 = 0 1 2 119872 (6)
in which 119894 denotes the 119894th iteration and 119873(119894)
119864denotes the
number of the survived cells of the 119894th iteration and119873(0)119864
= 119873Secondly we screen the reference cells based on (5) to
obtain the excisionwindow119864 and calculate VI of the survivedreference cells
Thirdly we compare the value ofVIwith119870VI to determinethe variability of 119864 If the window 119864 is variable we increasethe excision probability with a step of 5 times of the initial
value (eg if the initial value is 1119890 minus 6 the step is 5119890 minus 6) andrecalculate a lower 120582
And the second and third steps repeat until the referencecells are not variable With the iteratively calculated 120582 theinterferers can be removed and accordingly the survivedreference cells are in nonvariable environment
Besides the selected subset of reference cells to estimatethe background statistic the VIE-CFAR also determines amultiplier constant to form the adaptive detection thresholdUnder the assumption that the background cells are governedby an exponential distribution we determine the multiplierconstant 119862
119873based on CA-CFAR with reference cells [14]
119862119873= (119875fa)
minus1119873minus 1 (7)
where 119875fa is the predetermined probability of false alarm(PFA) It is worth noting that the number of reference cellsin window 119864 is 119873
119864and the multiplier 119862
119864is calculated from
(6) by replacing119873 with119873119864
3 VIE-CFAR for Ship Detection in SAR Images
Based on theVIE-CFAR scheme described above we proposea VIE-CFAR based ship detection method on SAR imageryFigure 2 illustrates the block diagram of the proposedmethod When applying the VIE-CFAR to ship detectionon SAR imagery we further improve the procedures in thefollowing aspects Firstly we extend the 1D reference windowto a 2D hollow stencil and obtain the reference cells basedon the proposed VIE-CFAR scheme Secondly we adopt the1198660 distribution to describe the statistical characteristic of sea
clutter Thirdly the method estimates the parameters of 1198660distribution and calculates the decision threshold to filterships from sea clutter Finally the CFAR detection results are
4 Journal of Sensors
Reference cells
Guard cells
CUT
(a)
Lead
ing
win
dow
Lagg
ing
win
dow
(b) (c) (d)
Figure 3 Illustration of the 2D stencil (a) the three-layer sliding window (b) leading and lagging window and (c) and (d) variations of thesliding window
postprocessed with morphological operations to cluster andfilter isolated pixels
As the SAR sensor captures the observed area fromboth range and azimuth directions the VIE-CFAR referencewindow for ship detection on SAR image is extended toa two-dimensional hollow stencil as shown in Figure 3(a)The stencil consists of three layers [3] where the centralone concentrates on the pixels under test and the guardwindow protects the target from leaking to the backgroundwindowThe stencil size depends on the image resolution andship target dimensionsThe leading and lagging windows areillustrated in Figure 3(b) Notice that the leading and laggingwindow can be defined as other forms to be more robust toclutter edges as shown in Figures 3(c) and 3(d) Due to thefact that the wave fields present various directions on SARimages (not only limited to horizontal or vertical) the stencilwindow should be designed flexibly to remain consistent withthe wave field direction
The adopted statistical model is another important factorthat impacts ship detection performance on SAR imageryConducted from themultiplicativemodel and the underlyingphysical scattering mechanisms the 119866
0 distribution hasarisen to represent clutters on SAR imagery [15] The PDF ofa random variable119883 that has an amplitude 1198660 distribution isdenoted as
119891119883 (119909) =
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
minus120572 120574 119871 119909 gt 0
(8)
where 119871 denotes the equivalent number of looks (ENL) ofthe amplitude image 120572 is a shape parameter that describesthe spikiness of the clutter 120574 is a scale parameter and Γ(sdot)is the gamma function The 119866
0 distribution is compati-ble with several special cases when the shape parameteradopts different values The exponential distribution is oneof the special cases of 1198660 distribution [17] The parametersare estimated from sea clutters by Mellin kind statistics[18]
Different from the one-dimensional CFAR detection the2D stencil ensures enough reference cells for the estimationof the background statisticsTherefore we estimate the shapeand scale parameters with different reference cells basedon the switch logic in Table 1 And then we directly derive
the detection threshold119879119889for ship detection on SAR imagery
by (8)
119875fa = intinfin
119879119889
119891119883 (119909) 119889119909 = int
infin
119879119889
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
119889119909
(9)
When 119871 = 1 close form of (8) can be derived
119875fa =120572 minus 1
120572120574120572(120574 + 119879
2
119889)120572
(10)
therefore 119879119889is presented as
119879119889= (
120572120574120572
120572 minus 11198751120572
fa minus 120574)
12
(11)
However analytical expression of (8) is difficult to besolved formost cases Once given the PFAwe derive the deci-sion threshold 119879
119889based on (8) with numerical calculations
Ship target is declared to be present if the image pixel valueexceeds the decision threshold
4 Simulation Results and Analysis
In this section we illustrate the performances of VIE-CFARfor the environments of homogeneous clutter edges andmultiple interferers We compare the probability of detection(PD) and the PFA performances of the VIE-CFAR with theexisting CFAR detectors including the CA GO SO OS (119896 =21 119896 is the order of the cell being taken as the estimation oflocal statistic) and VI-CFAR
Due to the lack of analytical expression for the PDF ofVI and the dependence between the VI and MR hypothesistest decisions [14] we apply the Monte-Carlo simulation(119872 = 1 000 000) In these simulations we mainly expect todemonstrate the ability of selecting homogeneous clutter cellsby the VIE-CFAR scheme Therefore we generally assumethe exponential distribution instead of the 1198660 distributionfor background cells and Swerling I fluctuation for the targetand interferers The interferer to noise ratio (INR) equalsthe signal to noise ratio (SNR) The interferers are generatedrandomly and inserted to the appointed cells The clutteredge sweeps from left to right (Window 119860 to Window 119861)with clutter to noise ratio (CNR) as 10 dB The multiplierconstants are calculated from (6) given that the number of
Journal of Sensors 5
reference cells is 119873 = 24 and the designed 119875fa is 1119890 minus 4 Asdescribed in [14] the values of VI and MR are related to theCNR and INR of the variable environments as well as thenumber of reference cellsWe here set them as 476 and 1806respectively The excision coefficient 120582 is calculated throughthe iteration procedure in Section 22 with an initial excisionprobability of 1119890 minus 6
Figure 4 illustrates the various environments of thesimulation including the homogeneous clutter edges andmultiple interferers Note that the clutter and interferer cellsare set to be stable values in Figure 4 It only illustrates therelative position of the clutter edge and interferers
41 Homogeneous Environment Figure 5 shows the PD per-formance in a homogeneous environment for the VIE-CFARalong with results for an optimum detector (with a fixeddetection threshold when the clutter power is known) and forthe CA-CFAR GO-CFAR SO-CFAR OS-CFAR (119896 = 21)and VI-CFAR All of the CFAR detectors perform similarlyand exhibit some CFAR loss relative to the optimumdetectorThe VIE-CFAR performs the same as VI-CFAR and behavessomewhat better than the SO- and OS-CFAR
42 Variable Environment with Clutter Edge In Figure 6 weevaluate the PFA performance of the proposed VIE-CFARunder the condition of clutter edges (as shown in Figures4(b) and 4(c)) Due to the adaptive selection procedureboth the VI-CFAR and VIE-CFAR behave steadily with thedesired PFA Particularly when the number of clutter cellsis more than 1198732 and the cell under test is from the clutterbackground the PFA achieved by the VIE-CFAR and VI-CFAR is superior to the other CFAR processors
43 Variable Environment with Multiple Interferers InFigure 7 we assess the performance of the VIE-CFAR in thepresence of a single interfering target that locates in one halfof the reference windowThe interferer is inserted in the 18thcell (as shown in Figure 4(d)) In this case the performancesof OS-CFAR SO-CFAR VI-CFAR and VIE-CFAR arerelatively unaffected while the performances of CA-CFARandGO-CFAR degrade heavilyThe degradation results fromthe fact that the interferer increases the estimated statisticsand the decision thresholds of the CA-CFAR and GO-CFARWe also observe that the VIE-CFAR and VI-CFAR performnearly the same This result is expected since they switch tothe same reference window in this situationThe small CFARloss in VI-CFAR and VIE-CFAR for low SNR is a resultof errors in the window selection hypothesis As the SNRincreases the VIE-CFAR selects the right reference cells andthe performance approaches to the SO-CFAR and OS-CFAR
In Figure 8 we present multiple interferers that locatein both halves of the reference window In the case oftwo interfering targets (inserted in the 5th and 20th cellsas shown in Figure 4(e)) the VIE-CFAR and OS-CFARretain good performances while the other detectors showperformance degradation The performance degradation ofVI-CFAR validates the necessity of introducing the excisionprocedure when the interfering targets are present in bothhalves of the reference window When the SNR is low
the VIE-CFAR switches not always to the E-CFAR andthe performance is a bit lower than the OS-CFAR As theSNR increases the VIE-CFAR behaves similarly to the OS-CFAR As the number of interfering targets increases to 4 andlocates in both halves of the reference window (the additionaltwo interferers locate at the 7th and 18th cells as shown inFigure 4(f)) the performance of the OS-CFAR shows largedegradation The reason lies in that the value of 119896 in theOS-CFAR is not appropriate to tolerate enough interferingtargets The performance of VIE-CFAR maintains a stablelevel and is robust to the number of interferers
Finally we evaluate the PFA performance of the proposedVIE-CFAR in the presence of multiple interferers FromFigure 9(a) the proposed method controls the PFA withinthe same order of the designed PFA This is because theVIE-CFAR scheme removes the multiple interferers by anexcision procedure and the resulting reference cells are underhomogeneous environments Figure 9(b) illustrates the vari-able index of the resulting reference cells The variable indexis lower than 119870VI and accordingly the detector performs asCA-CFAR with the resulting homogeneous reference cells
5 Validation for Ship Detection onSAR Imagery
Most of the operating ship detection systems such as thesearch for unidentified maritime objects (SUMO) and oceanmonitoring workstation (OMW) are developed from theCA-CFAR detector [3]Therefore we mainly conduct perfor-mance comparisons of the proposed method with the CA-CFAR and VI-CFAR detectors
The proposed VIE-CFAR based ship detection methodis validated on two frames of SAR imagery The first oneis acquired by ENVISAT on wide swath mode centered at3783∘N and 11991∘E (Yellow Sea China) with a resolution
of 125m times 125m in the range and azimuth directionsrespectively The image size is 193 times 228 pixels and contains39 visually inspected ships as shown in Figure 10(a) The seaclutter environment presents clutter edges The other one isacquired by TerraSAR-X over the area of Hong Kong with aresolution of 19mtimes33min the range and azimuth directionrespectively The image size is 739 times 887 pixels and contains41 visually inspected ships as shown in Figure 11(a)The shipsin this image are larger in pixels due to the higher resolutionand some of the ships are located closely Both the ENVISATand TerraSAR-X SAR images are level 2 products
The test guard and background windows of the CFARsliding stencil are set as 1 by 1 7 by 7 and 13 by 13 for theENVISAT image and 1 by 1 15 by 15 and 21 by 21 for theTerraSAR-X image respectively The designed 119875fa is set as00001 In the real SAR imagery the INR and number of refer-ence cells are larger than those in the simulations Thereforewe set the 119870VI and 119870MR as 25 and 1806 empirically Theexcision factor 120582 is determined by the iteration procedure
For the ENVISAT image detection results are illustratedin Figure 10 From Figures 10(b) 10(c) and 10(d) false alarmsare observed for the CA-CFAR VI-CFAR and VIE-CFARand the number of false alarms is 3 2 and 3 respectively Notethat the CFAR detection results are refined by morphological
6 Journal of Sensors
ClutterTarget
(a)
ClutterTarget
(b)
ClutterTarget
(c)
Interferer
ClutterTarget
(d)
Interferer
ClutterTarget
(e)
Interferer
ClutterTarget
(f)
Figure 4 Illustration of the various simulated environments (a) Homogeneous environment (b) clutter edge on the leading window (c)clutter edge on the lagging window (d) one interferer on the lagging window (the 18th cell) (d) two interferers on both halves of the window(the 5th and 20th cells) and (f) four interferers on both halves of the window (the 5th 7th 18th and 20th cells)
Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
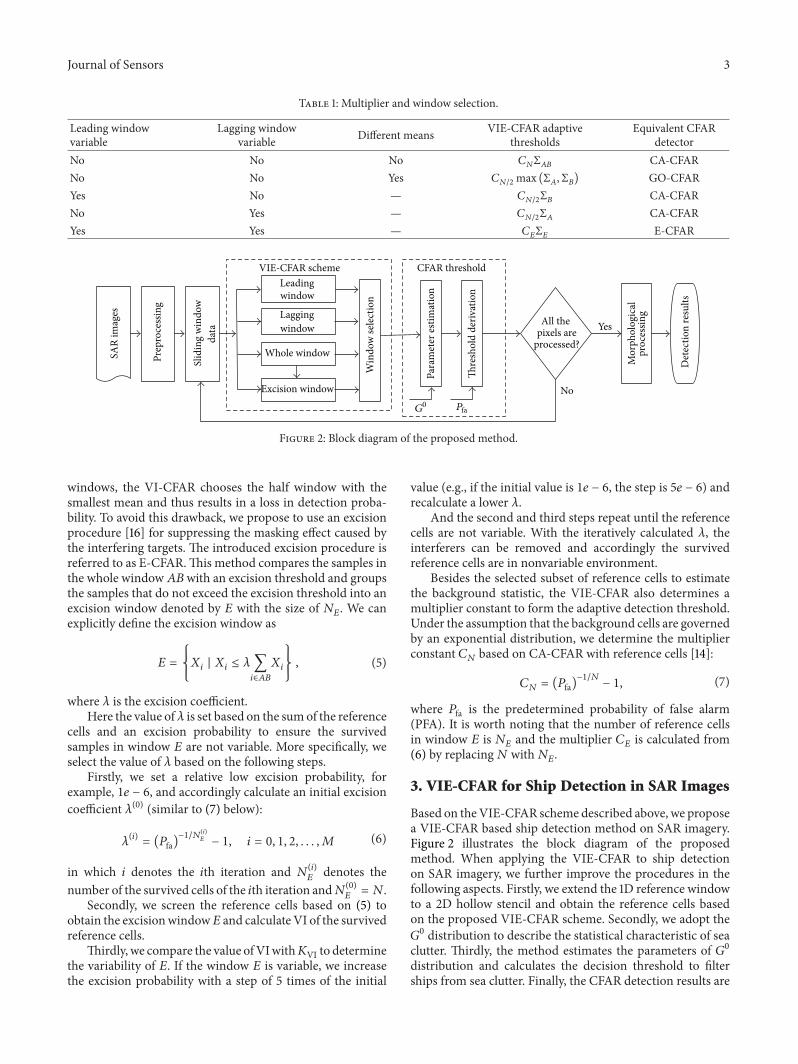
Journal of Sensors 3
Table 1 Multiplier and window selection
Leading windowvariable
Lagging windowvariable Different means VIE-CFAR adaptive
thresholdsEquivalent CFAR
detectorNo No No 119862
119873Σ119860119861
CA-CFARNo No Yes 119862
1198732max (Σ
119860 Σ119861) GO-CFAR
Yes No mdash 1198621198732Σ119861
CA-CFARNo Yes mdash 119862
1198732Σ119860
CA-CFARYes Yes mdash 119862
119864Σ119864
E-CFAR
SAR
imag
es
Prep
roce
ssin
g
Slid
ing
win
dow
VIE-CFAR schemeLeading
Whole window
Excision window
Win
dow
sele
ctio
n
CFAR threshold
Para
met
er es
timat
ion
Thre
shol
d de
rivat
ion
G0
All thepixels are
processedYes
No
Mor
phol
ogic
alpr
oces
sing
Det
ectio
n re
sults
data
window
Laggingwindow
Pfa
Figure 2 Block diagram of the proposed method
windows the VI-CFAR chooses the half window with thesmallest mean and thus results in a loss in detection proba-bility To avoid this drawback we propose to use an excisionprocedure [16] for suppressing the masking effect caused bythe interfering targets The introduced excision procedure isreferred to as E-CFARThis method compares the samples inthe whole window119860119861 with an excision threshold and groupsthe samples that do not exceed the excision threshold into anexcision window denoted by 119864 with the size of 119873
119864 We can
explicitly define the excision window as
119864 = 119883119894| 119883119894le 120582 sum
119894isin119860119861
119883119894 (5)
where 120582 is the excision coefficientHere the value of 120582 is set based on the sumof the reference
cells and an excision probability to ensure the survivedsamples in window 119864 are not variable More specifically weselect the value of 120582 based on the following steps
Firstly we set a relative low excision probability forexample 1119890 minus 6 and accordingly calculate an initial excisioncoefficient 120582(0) (similar to (7) below)
120582(119894)= (119875fa)
minus1119873(119894)
119864 minus 1 119894 = 0 1 2 119872 (6)
in which 119894 denotes the 119894th iteration and 119873(119894)
119864denotes the
number of the survived cells of the 119894th iteration and119873(0)119864
= 119873Secondly we screen the reference cells based on (5) to
obtain the excisionwindow119864 and calculate VI of the survivedreference cells
Thirdly we compare the value ofVIwith119870VI to determinethe variability of 119864 If the window 119864 is variable we increasethe excision probability with a step of 5 times of the initial
value (eg if the initial value is 1119890 minus 6 the step is 5119890 minus 6) andrecalculate a lower 120582
And the second and third steps repeat until the referencecells are not variable With the iteratively calculated 120582 theinterferers can be removed and accordingly the survivedreference cells are in nonvariable environment
Besides the selected subset of reference cells to estimatethe background statistic the VIE-CFAR also determines amultiplier constant to form the adaptive detection thresholdUnder the assumption that the background cells are governedby an exponential distribution we determine the multiplierconstant 119862
119873based on CA-CFAR with reference cells [14]
119862119873= (119875fa)
minus1119873minus 1 (7)
where 119875fa is the predetermined probability of false alarm(PFA) It is worth noting that the number of reference cellsin window 119864 is 119873
119864and the multiplier 119862
119864is calculated from
(6) by replacing119873 with119873119864
3 VIE-CFAR for Ship Detection in SAR Images
Based on theVIE-CFAR scheme described above we proposea VIE-CFAR based ship detection method on SAR imageryFigure 2 illustrates the block diagram of the proposedmethod When applying the VIE-CFAR to ship detectionon SAR imagery we further improve the procedures in thefollowing aspects Firstly we extend the 1D reference windowto a 2D hollow stencil and obtain the reference cells basedon the proposed VIE-CFAR scheme Secondly we adopt the1198660 distribution to describe the statistical characteristic of sea
clutter Thirdly the method estimates the parameters of 1198660distribution and calculates the decision threshold to filterships from sea clutter Finally the CFAR detection results are
4 Journal of Sensors
Reference cells
Guard cells
CUT
(a)
Lead
ing
win
dow
Lagg
ing
win
dow
(b) (c) (d)
Figure 3 Illustration of the 2D stencil (a) the three-layer sliding window (b) leading and lagging window and (c) and (d) variations of thesliding window
postprocessed with morphological operations to cluster andfilter isolated pixels
As the SAR sensor captures the observed area fromboth range and azimuth directions the VIE-CFAR referencewindow for ship detection on SAR image is extended toa two-dimensional hollow stencil as shown in Figure 3(a)The stencil consists of three layers [3] where the centralone concentrates on the pixels under test and the guardwindow protects the target from leaking to the backgroundwindowThe stencil size depends on the image resolution andship target dimensionsThe leading and lagging windows areillustrated in Figure 3(b) Notice that the leading and laggingwindow can be defined as other forms to be more robust toclutter edges as shown in Figures 3(c) and 3(d) Due to thefact that the wave fields present various directions on SARimages (not only limited to horizontal or vertical) the stencilwindow should be designed flexibly to remain consistent withthe wave field direction
The adopted statistical model is another important factorthat impacts ship detection performance on SAR imageryConducted from themultiplicativemodel and the underlyingphysical scattering mechanisms the 119866
0 distribution hasarisen to represent clutters on SAR imagery [15] The PDF ofa random variable119883 that has an amplitude 1198660 distribution isdenoted as
119891119883 (119909) =
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
minus120572 120574 119871 119909 gt 0
(8)
where 119871 denotes the equivalent number of looks (ENL) ofthe amplitude image 120572 is a shape parameter that describesthe spikiness of the clutter 120574 is a scale parameter and Γ(sdot)is the gamma function The 119866
0 distribution is compati-ble with several special cases when the shape parameteradopts different values The exponential distribution is oneof the special cases of 1198660 distribution [17] The parametersare estimated from sea clutters by Mellin kind statistics[18]
Different from the one-dimensional CFAR detection the2D stencil ensures enough reference cells for the estimationof the background statisticsTherefore we estimate the shapeand scale parameters with different reference cells basedon the switch logic in Table 1 And then we directly derive
the detection threshold119879119889for ship detection on SAR imagery
by (8)
119875fa = intinfin
119879119889
119891119883 (119909) 119889119909 = int
infin
119879119889
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
119889119909
(9)
When 119871 = 1 close form of (8) can be derived
119875fa =120572 minus 1
120572120574120572(120574 + 119879
2
119889)120572
(10)
therefore 119879119889is presented as
119879119889= (
120572120574120572
120572 minus 11198751120572
fa minus 120574)
12
(11)
However analytical expression of (8) is difficult to besolved formost cases Once given the PFAwe derive the deci-sion threshold 119879
119889based on (8) with numerical calculations
Ship target is declared to be present if the image pixel valueexceeds the decision threshold
4 Simulation Results and Analysis
In this section we illustrate the performances of VIE-CFARfor the environments of homogeneous clutter edges andmultiple interferers We compare the probability of detection(PD) and the PFA performances of the VIE-CFAR with theexisting CFAR detectors including the CA GO SO OS (119896 =21 119896 is the order of the cell being taken as the estimation oflocal statistic) and VI-CFAR
Due to the lack of analytical expression for the PDF ofVI and the dependence between the VI and MR hypothesistest decisions [14] we apply the Monte-Carlo simulation(119872 = 1 000 000) In these simulations we mainly expect todemonstrate the ability of selecting homogeneous clutter cellsby the VIE-CFAR scheme Therefore we generally assumethe exponential distribution instead of the 1198660 distributionfor background cells and Swerling I fluctuation for the targetand interferers The interferer to noise ratio (INR) equalsthe signal to noise ratio (SNR) The interferers are generatedrandomly and inserted to the appointed cells The clutteredge sweeps from left to right (Window 119860 to Window 119861)with clutter to noise ratio (CNR) as 10 dB The multiplierconstants are calculated from (6) given that the number of
Journal of Sensors 5
reference cells is 119873 = 24 and the designed 119875fa is 1119890 minus 4 Asdescribed in [14] the values of VI and MR are related to theCNR and INR of the variable environments as well as thenumber of reference cellsWe here set them as 476 and 1806respectively The excision coefficient 120582 is calculated throughthe iteration procedure in Section 22 with an initial excisionprobability of 1119890 minus 6
Figure 4 illustrates the various environments of thesimulation including the homogeneous clutter edges andmultiple interferers Note that the clutter and interferer cellsare set to be stable values in Figure 4 It only illustrates therelative position of the clutter edge and interferers
41 Homogeneous Environment Figure 5 shows the PD per-formance in a homogeneous environment for the VIE-CFARalong with results for an optimum detector (with a fixeddetection threshold when the clutter power is known) and forthe CA-CFAR GO-CFAR SO-CFAR OS-CFAR (119896 = 21)and VI-CFAR All of the CFAR detectors perform similarlyand exhibit some CFAR loss relative to the optimumdetectorThe VIE-CFAR performs the same as VI-CFAR and behavessomewhat better than the SO- and OS-CFAR
42 Variable Environment with Clutter Edge In Figure 6 weevaluate the PFA performance of the proposed VIE-CFARunder the condition of clutter edges (as shown in Figures4(b) and 4(c)) Due to the adaptive selection procedureboth the VI-CFAR and VIE-CFAR behave steadily with thedesired PFA Particularly when the number of clutter cellsis more than 1198732 and the cell under test is from the clutterbackground the PFA achieved by the VIE-CFAR and VI-CFAR is superior to the other CFAR processors
43 Variable Environment with Multiple Interferers InFigure 7 we assess the performance of the VIE-CFAR in thepresence of a single interfering target that locates in one halfof the reference windowThe interferer is inserted in the 18thcell (as shown in Figure 4(d)) In this case the performancesof OS-CFAR SO-CFAR VI-CFAR and VIE-CFAR arerelatively unaffected while the performances of CA-CFARandGO-CFAR degrade heavilyThe degradation results fromthe fact that the interferer increases the estimated statisticsand the decision thresholds of the CA-CFAR and GO-CFARWe also observe that the VIE-CFAR and VI-CFAR performnearly the same This result is expected since they switch tothe same reference window in this situationThe small CFARloss in VI-CFAR and VIE-CFAR for low SNR is a resultof errors in the window selection hypothesis As the SNRincreases the VIE-CFAR selects the right reference cells andthe performance approaches to the SO-CFAR and OS-CFAR
In Figure 8 we present multiple interferers that locatein both halves of the reference window In the case oftwo interfering targets (inserted in the 5th and 20th cellsas shown in Figure 4(e)) the VIE-CFAR and OS-CFARretain good performances while the other detectors showperformance degradation The performance degradation ofVI-CFAR validates the necessity of introducing the excisionprocedure when the interfering targets are present in bothhalves of the reference window When the SNR is low
the VIE-CFAR switches not always to the E-CFAR andthe performance is a bit lower than the OS-CFAR As theSNR increases the VIE-CFAR behaves similarly to the OS-CFAR As the number of interfering targets increases to 4 andlocates in both halves of the reference window (the additionaltwo interferers locate at the 7th and 18th cells as shown inFigure 4(f)) the performance of the OS-CFAR shows largedegradation The reason lies in that the value of 119896 in theOS-CFAR is not appropriate to tolerate enough interferingtargets The performance of VIE-CFAR maintains a stablelevel and is robust to the number of interferers
Finally we evaluate the PFA performance of the proposedVIE-CFAR in the presence of multiple interferers FromFigure 9(a) the proposed method controls the PFA withinthe same order of the designed PFA This is because theVIE-CFAR scheme removes the multiple interferers by anexcision procedure and the resulting reference cells are underhomogeneous environments Figure 9(b) illustrates the vari-able index of the resulting reference cells The variable indexis lower than 119870VI and accordingly the detector performs asCA-CFAR with the resulting homogeneous reference cells
5 Validation for Ship Detection onSAR Imagery
Most of the operating ship detection systems such as thesearch for unidentified maritime objects (SUMO) and oceanmonitoring workstation (OMW) are developed from theCA-CFAR detector [3]Therefore we mainly conduct perfor-mance comparisons of the proposed method with the CA-CFAR and VI-CFAR detectors
The proposed VIE-CFAR based ship detection methodis validated on two frames of SAR imagery The first oneis acquired by ENVISAT on wide swath mode centered at3783∘N and 11991∘E (Yellow Sea China) with a resolution
of 125m times 125m in the range and azimuth directionsrespectively The image size is 193 times 228 pixels and contains39 visually inspected ships as shown in Figure 10(a) The seaclutter environment presents clutter edges The other one isacquired by TerraSAR-X over the area of Hong Kong with aresolution of 19mtimes33min the range and azimuth directionrespectively The image size is 739 times 887 pixels and contains41 visually inspected ships as shown in Figure 11(a)The shipsin this image are larger in pixels due to the higher resolutionand some of the ships are located closely Both the ENVISATand TerraSAR-X SAR images are level 2 products
The test guard and background windows of the CFARsliding stencil are set as 1 by 1 7 by 7 and 13 by 13 for theENVISAT image and 1 by 1 15 by 15 and 21 by 21 for theTerraSAR-X image respectively The designed 119875fa is set as00001 In the real SAR imagery the INR and number of refer-ence cells are larger than those in the simulations Thereforewe set the 119870VI and 119870MR as 25 and 1806 empirically Theexcision factor 120582 is determined by the iteration procedure
For the ENVISAT image detection results are illustratedin Figure 10 From Figures 10(b) 10(c) and 10(d) false alarmsare observed for the CA-CFAR VI-CFAR and VIE-CFARand the number of false alarms is 3 2 and 3 respectively Notethat the CFAR detection results are refined by morphological
6 Journal of Sensors
ClutterTarget
(a)
ClutterTarget
(b)
ClutterTarget
(c)
Interferer
ClutterTarget
(d)
Interferer
ClutterTarget
(e)
Interferer
ClutterTarget
(f)
Figure 4 Illustration of the various simulated environments (a) Homogeneous environment (b) clutter edge on the leading window (c)clutter edge on the lagging window (d) one interferer on the lagging window (the 18th cell) (d) two interferers on both halves of the window(the 5th and 20th cells) and (f) four interferers on both halves of the window (the 5th 7th 18th and 20th cells)
Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Sensors
Reference cells
Guard cells
CUT
(a)
Lead
ing
win
dow
Lagg
ing
win
dow
(b) (c) (d)
Figure 3 Illustration of the 2D stencil (a) the three-layer sliding window (b) leading and lagging window and (c) and (d) variations of thesliding window
postprocessed with morphological operations to cluster andfilter isolated pixels
As the SAR sensor captures the observed area fromboth range and azimuth directions the VIE-CFAR referencewindow for ship detection on SAR image is extended toa two-dimensional hollow stencil as shown in Figure 3(a)The stencil consists of three layers [3] where the centralone concentrates on the pixels under test and the guardwindow protects the target from leaking to the backgroundwindowThe stencil size depends on the image resolution andship target dimensionsThe leading and lagging windows areillustrated in Figure 3(b) Notice that the leading and laggingwindow can be defined as other forms to be more robust toclutter edges as shown in Figures 3(c) and 3(d) Due to thefact that the wave fields present various directions on SARimages (not only limited to horizontal or vertical) the stencilwindow should be designed flexibly to remain consistent withthe wave field direction
The adopted statistical model is another important factorthat impacts ship detection performance on SAR imageryConducted from themultiplicativemodel and the underlyingphysical scattering mechanisms the 119866
0 distribution hasarisen to represent clutters on SAR imagery [15] The PDF ofa random variable119883 that has an amplitude 1198660 distribution isdenoted as
119891119883 (119909) =
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
minus120572 120574 119871 119909 gt 0
(8)
where 119871 denotes the equivalent number of looks (ENL) ofthe amplitude image 120572 is a shape parameter that describesthe spikiness of the clutter 120574 is a scale parameter and Γ(sdot)is the gamma function The 119866
0 distribution is compati-ble with several special cases when the shape parameteradopts different values The exponential distribution is oneof the special cases of 1198660 distribution [17] The parametersare estimated from sea clutters by Mellin kind statistics[18]
Different from the one-dimensional CFAR detection the2D stencil ensures enough reference cells for the estimationof the background statisticsTherefore we estimate the shapeand scale parameters with different reference cells basedon the switch logic in Table 1 And then we directly derive
the detection threshold119879119889for ship detection on SAR imagery
by (8)
119875fa = intinfin
119879119889
119891119883 (119909) 119889119909 = int
infin
119879119889
2119871119871Γ (119871 minus 120572) 119909
2119871minus1
120574120572Γ (119871) Γ (minus120572) (120574 + 1198711199092)119871minus120572
119889119909
(9)
When 119871 = 1 close form of (8) can be derived
119875fa =120572 minus 1
120572120574120572(120574 + 119879
2
119889)120572
(10)
therefore 119879119889is presented as
119879119889= (
120572120574120572
120572 minus 11198751120572
fa minus 120574)
12
(11)
However analytical expression of (8) is difficult to besolved formost cases Once given the PFAwe derive the deci-sion threshold 119879
119889based on (8) with numerical calculations
Ship target is declared to be present if the image pixel valueexceeds the decision threshold
4 Simulation Results and Analysis
In this section we illustrate the performances of VIE-CFARfor the environments of homogeneous clutter edges andmultiple interferers We compare the probability of detection(PD) and the PFA performances of the VIE-CFAR with theexisting CFAR detectors including the CA GO SO OS (119896 =21 119896 is the order of the cell being taken as the estimation oflocal statistic) and VI-CFAR
Due to the lack of analytical expression for the PDF ofVI and the dependence between the VI and MR hypothesistest decisions [14] we apply the Monte-Carlo simulation(119872 = 1 000 000) In these simulations we mainly expect todemonstrate the ability of selecting homogeneous clutter cellsby the VIE-CFAR scheme Therefore we generally assumethe exponential distribution instead of the 1198660 distributionfor background cells and Swerling I fluctuation for the targetand interferers The interferer to noise ratio (INR) equalsthe signal to noise ratio (SNR) The interferers are generatedrandomly and inserted to the appointed cells The clutteredge sweeps from left to right (Window 119860 to Window 119861)with clutter to noise ratio (CNR) as 10 dB The multiplierconstants are calculated from (6) given that the number of
Journal of Sensors 5
reference cells is 119873 = 24 and the designed 119875fa is 1119890 minus 4 Asdescribed in [14] the values of VI and MR are related to theCNR and INR of the variable environments as well as thenumber of reference cellsWe here set them as 476 and 1806respectively The excision coefficient 120582 is calculated throughthe iteration procedure in Section 22 with an initial excisionprobability of 1119890 minus 6
Figure 4 illustrates the various environments of thesimulation including the homogeneous clutter edges andmultiple interferers Note that the clutter and interferer cellsare set to be stable values in Figure 4 It only illustrates therelative position of the clutter edge and interferers
41 Homogeneous Environment Figure 5 shows the PD per-formance in a homogeneous environment for the VIE-CFARalong with results for an optimum detector (with a fixeddetection threshold when the clutter power is known) and forthe CA-CFAR GO-CFAR SO-CFAR OS-CFAR (119896 = 21)and VI-CFAR All of the CFAR detectors perform similarlyand exhibit some CFAR loss relative to the optimumdetectorThe VIE-CFAR performs the same as VI-CFAR and behavessomewhat better than the SO- and OS-CFAR
42 Variable Environment with Clutter Edge In Figure 6 weevaluate the PFA performance of the proposed VIE-CFARunder the condition of clutter edges (as shown in Figures4(b) and 4(c)) Due to the adaptive selection procedureboth the VI-CFAR and VIE-CFAR behave steadily with thedesired PFA Particularly when the number of clutter cellsis more than 1198732 and the cell under test is from the clutterbackground the PFA achieved by the VIE-CFAR and VI-CFAR is superior to the other CFAR processors
43 Variable Environment with Multiple Interferers InFigure 7 we assess the performance of the VIE-CFAR in thepresence of a single interfering target that locates in one halfof the reference windowThe interferer is inserted in the 18thcell (as shown in Figure 4(d)) In this case the performancesof OS-CFAR SO-CFAR VI-CFAR and VIE-CFAR arerelatively unaffected while the performances of CA-CFARandGO-CFAR degrade heavilyThe degradation results fromthe fact that the interferer increases the estimated statisticsand the decision thresholds of the CA-CFAR and GO-CFARWe also observe that the VIE-CFAR and VI-CFAR performnearly the same This result is expected since they switch tothe same reference window in this situationThe small CFARloss in VI-CFAR and VIE-CFAR for low SNR is a resultof errors in the window selection hypothesis As the SNRincreases the VIE-CFAR selects the right reference cells andthe performance approaches to the SO-CFAR and OS-CFAR
In Figure 8 we present multiple interferers that locatein both halves of the reference window In the case oftwo interfering targets (inserted in the 5th and 20th cellsas shown in Figure 4(e)) the VIE-CFAR and OS-CFARretain good performances while the other detectors showperformance degradation The performance degradation ofVI-CFAR validates the necessity of introducing the excisionprocedure when the interfering targets are present in bothhalves of the reference window When the SNR is low
the VIE-CFAR switches not always to the E-CFAR andthe performance is a bit lower than the OS-CFAR As theSNR increases the VIE-CFAR behaves similarly to the OS-CFAR As the number of interfering targets increases to 4 andlocates in both halves of the reference window (the additionaltwo interferers locate at the 7th and 18th cells as shown inFigure 4(f)) the performance of the OS-CFAR shows largedegradation The reason lies in that the value of 119896 in theOS-CFAR is not appropriate to tolerate enough interferingtargets The performance of VIE-CFAR maintains a stablelevel and is robust to the number of interferers
Finally we evaluate the PFA performance of the proposedVIE-CFAR in the presence of multiple interferers FromFigure 9(a) the proposed method controls the PFA withinthe same order of the designed PFA This is because theVIE-CFAR scheme removes the multiple interferers by anexcision procedure and the resulting reference cells are underhomogeneous environments Figure 9(b) illustrates the vari-able index of the resulting reference cells The variable indexis lower than 119870VI and accordingly the detector performs asCA-CFAR with the resulting homogeneous reference cells
5 Validation for Ship Detection onSAR Imagery
Most of the operating ship detection systems such as thesearch for unidentified maritime objects (SUMO) and oceanmonitoring workstation (OMW) are developed from theCA-CFAR detector [3]Therefore we mainly conduct perfor-mance comparisons of the proposed method with the CA-CFAR and VI-CFAR detectors
The proposed VIE-CFAR based ship detection methodis validated on two frames of SAR imagery The first oneis acquired by ENVISAT on wide swath mode centered at3783∘N and 11991∘E (Yellow Sea China) with a resolution
of 125m times 125m in the range and azimuth directionsrespectively The image size is 193 times 228 pixels and contains39 visually inspected ships as shown in Figure 10(a) The seaclutter environment presents clutter edges The other one isacquired by TerraSAR-X over the area of Hong Kong with aresolution of 19mtimes33min the range and azimuth directionrespectively The image size is 739 times 887 pixels and contains41 visually inspected ships as shown in Figure 11(a)The shipsin this image are larger in pixels due to the higher resolutionand some of the ships are located closely Both the ENVISATand TerraSAR-X SAR images are level 2 products
The test guard and background windows of the CFARsliding stencil are set as 1 by 1 7 by 7 and 13 by 13 for theENVISAT image and 1 by 1 15 by 15 and 21 by 21 for theTerraSAR-X image respectively The designed 119875fa is set as00001 In the real SAR imagery the INR and number of refer-ence cells are larger than those in the simulations Thereforewe set the 119870VI and 119870MR as 25 and 1806 empirically Theexcision factor 120582 is determined by the iteration procedure
For the ENVISAT image detection results are illustratedin Figure 10 From Figures 10(b) 10(c) and 10(d) false alarmsare observed for the CA-CFAR VI-CFAR and VIE-CFARand the number of false alarms is 3 2 and 3 respectively Notethat the CFAR detection results are refined by morphological
6 Journal of Sensors
ClutterTarget
(a)
ClutterTarget
(b)
ClutterTarget
(c)
Interferer
ClutterTarget
(d)
Interferer
ClutterTarget
(e)
Interferer
ClutterTarget
(f)
Figure 4 Illustration of the various simulated environments (a) Homogeneous environment (b) clutter edge on the leading window (c)clutter edge on the lagging window (d) one interferer on the lagging window (the 18th cell) (d) two interferers on both halves of the window(the 5th and 20th cells) and (f) four interferers on both halves of the window (the 5th 7th 18th and 20th cells)
Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 5
reference cells is 119873 = 24 and the designed 119875fa is 1119890 minus 4 Asdescribed in [14] the values of VI and MR are related to theCNR and INR of the variable environments as well as thenumber of reference cellsWe here set them as 476 and 1806respectively The excision coefficient 120582 is calculated throughthe iteration procedure in Section 22 with an initial excisionprobability of 1119890 minus 6
Figure 4 illustrates the various environments of thesimulation including the homogeneous clutter edges andmultiple interferers Note that the clutter and interferer cellsare set to be stable values in Figure 4 It only illustrates therelative position of the clutter edge and interferers
41 Homogeneous Environment Figure 5 shows the PD per-formance in a homogeneous environment for the VIE-CFARalong with results for an optimum detector (with a fixeddetection threshold when the clutter power is known) and forthe CA-CFAR GO-CFAR SO-CFAR OS-CFAR (119896 = 21)and VI-CFAR All of the CFAR detectors perform similarlyand exhibit some CFAR loss relative to the optimumdetectorThe VIE-CFAR performs the same as VI-CFAR and behavessomewhat better than the SO- and OS-CFAR
42 Variable Environment with Clutter Edge In Figure 6 weevaluate the PFA performance of the proposed VIE-CFARunder the condition of clutter edges (as shown in Figures4(b) and 4(c)) Due to the adaptive selection procedureboth the VI-CFAR and VIE-CFAR behave steadily with thedesired PFA Particularly when the number of clutter cellsis more than 1198732 and the cell under test is from the clutterbackground the PFA achieved by the VIE-CFAR and VI-CFAR is superior to the other CFAR processors
43 Variable Environment with Multiple Interferers InFigure 7 we assess the performance of the VIE-CFAR in thepresence of a single interfering target that locates in one halfof the reference windowThe interferer is inserted in the 18thcell (as shown in Figure 4(d)) In this case the performancesof OS-CFAR SO-CFAR VI-CFAR and VIE-CFAR arerelatively unaffected while the performances of CA-CFARandGO-CFAR degrade heavilyThe degradation results fromthe fact that the interferer increases the estimated statisticsand the decision thresholds of the CA-CFAR and GO-CFARWe also observe that the VIE-CFAR and VI-CFAR performnearly the same This result is expected since they switch tothe same reference window in this situationThe small CFARloss in VI-CFAR and VIE-CFAR for low SNR is a resultof errors in the window selection hypothesis As the SNRincreases the VIE-CFAR selects the right reference cells andthe performance approaches to the SO-CFAR and OS-CFAR
In Figure 8 we present multiple interferers that locatein both halves of the reference window In the case oftwo interfering targets (inserted in the 5th and 20th cellsas shown in Figure 4(e)) the VIE-CFAR and OS-CFARretain good performances while the other detectors showperformance degradation The performance degradation ofVI-CFAR validates the necessity of introducing the excisionprocedure when the interfering targets are present in bothhalves of the reference window When the SNR is low
the VIE-CFAR switches not always to the E-CFAR andthe performance is a bit lower than the OS-CFAR As theSNR increases the VIE-CFAR behaves similarly to the OS-CFAR As the number of interfering targets increases to 4 andlocates in both halves of the reference window (the additionaltwo interferers locate at the 7th and 18th cells as shown inFigure 4(f)) the performance of the OS-CFAR shows largedegradation The reason lies in that the value of 119896 in theOS-CFAR is not appropriate to tolerate enough interferingtargets The performance of VIE-CFAR maintains a stablelevel and is robust to the number of interferers
Finally we evaluate the PFA performance of the proposedVIE-CFAR in the presence of multiple interferers FromFigure 9(a) the proposed method controls the PFA withinthe same order of the designed PFA This is because theVIE-CFAR scheme removes the multiple interferers by anexcision procedure and the resulting reference cells are underhomogeneous environments Figure 9(b) illustrates the vari-able index of the resulting reference cells The variable indexis lower than 119870VI and accordingly the detector performs asCA-CFAR with the resulting homogeneous reference cells
5 Validation for Ship Detection onSAR Imagery
Most of the operating ship detection systems such as thesearch for unidentified maritime objects (SUMO) and oceanmonitoring workstation (OMW) are developed from theCA-CFAR detector [3]Therefore we mainly conduct perfor-mance comparisons of the proposed method with the CA-CFAR and VI-CFAR detectors
The proposed VIE-CFAR based ship detection methodis validated on two frames of SAR imagery The first oneis acquired by ENVISAT on wide swath mode centered at3783∘N and 11991∘E (Yellow Sea China) with a resolution
of 125m times 125m in the range and azimuth directionsrespectively The image size is 193 times 228 pixels and contains39 visually inspected ships as shown in Figure 10(a) The seaclutter environment presents clutter edges The other one isacquired by TerraSAR-X over the area of Hong Kong with aresolution of 19mtimes33min the range and azimuth directionrespectively The image size is 739 times 887 pixels and contains41 visually inspected ships as shown in Figure 11(a)The shipsin this image are larger in pixels due to the higher resolutionand some of the ships are located closely Both the ENVISATand TerraSAR-X SAR images are level 2 products
The test guard and background windows of the CFARsliding stencil are set as 1 by 1 7 by 7 and 13 by 13 for theENVISAT image and 1 by 1 15 by 15 and 21 by 21 for theTerraSAR-X image respectively The designed 119875fa is set as00001 In the real SAR imagery the INR and number of refer-ence cells are larger than those in the simulations Thereforewe set the 119870VI and 119870MR as 25 and 1806 empirically Theexcision factor 120582 is determined by the iteration procedure
For the ENVISAT image detection results are illustratedin Figure 10 From Figures 10(b) 10(c) and 10(d) false alarmsare observed for the CA-CFAR VI-CFAR and VIE-CFARand the number of false alarms is 3 2 and 3 respectively Notethat the CFAR detection results are refined by morphological
6 Journal of Sensors
ClutterTarget
(a)
ClutterTarget
(b)
ClutterTarget
(c)
Interferer
ClutterTarget
(d)
Interferer
ClutterTarget
(e)
Interferer
ClutterTarget
(f)
Figure 4 Illustration of the various simulated environments (a) Homogeneous environment (b) clutter edge on the leading window (c)clutter edge on the lagging window (d) one interferer on the lagging window (the 18th cell) (d) two interferers on both halves of the window(the 5th and 20th cells) and (f) four interferers on both halves of the window (the 5th 7th 18th and 20th cells)
Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Sensors
ClutterTarget
(a)
ClutterTarget
(b)
ClutterTarget
(c)
Interferer
ClutterTarget
(d)
Interferer
ClutterTarget
(e)
Interferer
ClutterTarget
(f)
Figure 4 Illustration of the various simulated environments (a) Homogeneous environment (b) clutter edge on the leading window (c)clutter edge on the lagging window (d) one interferer on the lagging window (the 18th cell) (d) two interferers on both halves of the window(the 5th and 20th cells) and (f) four interferers on both halves of the window (the 5th 7th 18th and 20th cells)
Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 7
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
OptimumCA-CFARGO-CFARSO-CFAR
OS(21)-CFARVI-CFARVIE-CFAR
Figure 5 PD comparison of VIE-CFAR optimum detector CA-CFAR GO-CFAR SO-CFAR OS-CFAR and VI-CFAR in homo-geneous environment
0 5 10 15 20Number of clutter cells
CA-CFARGO-CFARSO-CFAROS-CFAR
VI-CFARVIE-CFARDesired FAR
log(
pfa)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
Figure 6 PFA comparison of VIE-CFAR CA-CFAR GO-CFARSO-CFAR OS-CFAR andVI-CFAR in the presence of clutter edges
proceduresThe number of false alarms produced by the pro-posed VIE-CFAR is consistent with the other two detectorsin the final detection results
In the TerraSAR-X SAR image the closely located shipsdegrade the performances of CA-CFAR and VI-CFAR asshown in Figures 11(b) and 11(c) Similar to the resultsof the ENVISAT image the CFAR detection results ofthe TerraSAR-X image are also refined by morphologicalprocedures For the CA-CFAR the ships number 6 7 8 26and 29 are misdetected For the VI-CFAR the ships number
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS(211)-CFARVI-CFARVIE-CFAR
Figure 7 PD comparison of VIE-CFAR CA- GO- SO- OS- andVI-CFAR for a single interfering target on one half of the referencewindows
5 10 15 20 25 300
01
02
03
04
05
06
07
08
09
1
SNR (dB)
Det
ectio
n pr
obab
ility
CA-CFARGO-CFARSO-CFAR
OS-CFARVI-CFARVIE-CFAR
2 interferers
4 interferers
Figure 8 PD comparison of VIE-CFAR CA- GO- SO- OS-and VI-CFAR for multiple interfering targets on both halves of thereference windows
15 26 and 29 are misdetected and there are 6 additionalfalse alarms The VIE-CFAR also produces 5 false alarmshowever it alleviates the masking effect of the neighboringinterferers and achieves highest PD among the detectors asshown in Figure 11(d) In fact the false alarms in the VI-CFAR and VIE-CFAR detection results are produced by highlevel intensity of sea clutters These impulsive clutters causefalse alarms intrinsically Although the CA-CFAR producesfewer false alarms there are 5 ships misdetected which isunacceptable in practical marine surveillance applications
8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Sensors
5 10 15 20 25 30SNR (dB)
Prob
abili
ty o
f fal
se al
arm
Designed PFA2 interferers4 interferers
10minus3
10minus4
10minus5
(a)
5 10 15 20 25 3015
2
25
3
35
4
45
5
SNR (dB)
Varia
ble i
ndex
2 interferers4 interferers
KVI
(b)
Figure 9 PFA performance of the proposed method with multiple interferers (a) PFA and (b) threshold of the variable index
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
(a)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
3132
33
34
353637
3839
12
3
(b)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
2122
23
2425
2627
28
29
30
3132
33
34
353637
3839
12
(c)
1
2
3
4
5
67
8
9
10
1112
13
14
15
16
17
18
19
20
21
22
23
2425
2627
28
29
30
3132
33
34
353637
3839
12 3
(d)
Figure 10 Detection results on ENVISAT image (a) SAR image of the study area with visually inspected ships marked by red square (b)CA-CFAR detection results (c) VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 9
1
2
3
4
5
67
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
3031
32
33
34
35
36
37 3839
40
41
(a)
1
2
3
4
5
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
29
30
31
32 33
34
35
36
12
3
45
(b)
1
2
3
1
4
2
5
67
389
4
10
11
12
13
14
5
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
3233
34 3536
37
38
6
1
2 3
(c)
1
2
3
1
4
5
267
89
10
11
1213
14
15
16
17
18
19
20
21
22
23
24
2526
27
28
3
29
3031
32
33
34
35
36
374
3839
40
41
5
(d)Figure 11 Detection results on TerraSAR-X SAR image with visually inspected ships marked by red square (a) SAR image of the study area(b) CA-CFAR detection results (c)VI-CFAR detection results and (d) VIE-CFAR detection results (red square detected ships green ellipsefalse alarms Cyan Ellipse missing detection)
Table 2 Overview of the detection results obtained by different detectors
Detectors Number of ships Number of detected ships Number of false alarms Number of missed shipsCA-CFAR 80 75 3 5VI-CFAR 80 77 8 3VIE-CFAR 80 80 8 0
Finally we summarize the detection results on theENVISAT and TerraSAR-X SAR imagery in Table 2 Theresults confirm that the VIE-CFAR is superior to VI-CFARand CA-CFAR in terms of PDThe VIE-CFAR is more robustthan the other detectors in the environment of multipleinterferers
6 Conclusions
In this paper we have proposed a VIE-CFAR based shipdetection method on SAR imageryThe VIE-CFAR improvesthe concept of VI-CFAR detection by introducing an exci-sion procedure to alleviate the masking effect of multipleinterferers We have analyzed the performances of the VIE-CFAR detector under various environments and validatedthe proposed ship detection method on ENVISAT andTerraSAR-X SAR imagery We conclude from the validation
that the proposed VIE-CFAR is robust in the presence ofmultiple interferers compared to the VI-CFAR and CA-CFAR
With the validation on real SAR imagery the proposedVIE-CFAR behaves robustly in nonhomogeneous environ-ments especially in the presence ofmultiple interferers Someadditional remarks and discussions are given as follows
(1) The VIE-CFAR accommodates the variety of envi-ronments and switches among several basic CFARdetectors dynamically In paerticular we introducethe excision procedure to address the multiple inter-ferers that come from spiky sea clutters ambiguitiesand neighboring ships for ship detection on SARimagery Validation on ENVISAT and TerraSAR-Ximages illustrates the effectiveness of the proposedmethod
10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Journal of Sensors
(2) The three-layer stencil is usually employed for shipdetection on SAR imagery to avoid the ship pixelsleaking to the clutter window If the size of the stencilis set properly it alleviates the masking effect of theship itself However it is not able to account forthe multiple interferers that we considered in thispaper The proposed VIE-CFAR based ship detectionmethod alleviates the masking effect of the ship itselfby employing the stencil and further addresses thechallenges that come from multiple interferers by theexcision procedure
(3) Due to the window switching strategy and the addi-tional excision procedure the proposed VIE-CFARconsumes more computation than the CA-CFARHowever the proposedmethod really produces betterresults in difficult scenarios Once the method isembedded in operating ship detection system fastalgorithm and strategy can be designed to compen-sate the additional computation complexity
(4) In the detection results several kinds of false alarmssuch as spiky sea clutters islands and other man-made objects are facilitating to appear They behavesimilarly in terms of image intensity with ships andare difficult to be removed by the CFAR method Infact polarimetric information has been introduced toanalyze the different scattering mechanisms of shipsand false alarms However it is out of the scope of thispaper and can be investigated in future work
(5) Ship surveillance with SAR images consists of sev-eral modules such as land masking ship detectionparameter derivation ship recognition and crossvalidation with auxiliary data We here focus onthe detection stage and evaluate the performance ofthe proposed VIE-CFAR scheme Future work willfocus on embedding the proposed VIE-CFAR into acomplete processing chain for ship surveillance withSAR imagery
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is partially supported by the National NaturalScience Foundation of China under Grants 61372163 and61240058
References
[1] G Margarit J J Mallorqui J M Rius and J Sanz-MarcosldquoOn the usage of GRECOSAR an orbital polarimetric SARsimulator of complex targets to vessel classification studiesrdquoIEEE Transactions on Geoscience and Remote Sensing vol 44no 12 pp 3517ndash3525 2006
[2] A Moreira P Prats-Iraola M Younis G Krieger I Hajnsekand K P Papathanassiou ldquoA tutorial on synthetic aperture
radarrdquo IEEEGeoscience and Remote SensingMagazine vol 1 no1 pp 6ndash43 2013
[3] D Crisp ldquoThe State-of-the-Art in ship detection in syntheticaperture radar imageryrdquo Tech Rep 013-053 Austrilian DefenceScience and Technology Organisation 2004
[4] S Brusch S Lehner T Fritz M Soccorsi A Soloviev and BVan Schie ldquoShip surveillance with TerraSAR-Xrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 49 no 3 pp 1092ndash1103 2011
[5] JWei P Li J Yang J Zhang and F Lang ldquoA new automatic shipdetection method using L-band polarimetric SAR imageryrdquoIEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing vol 7 no 4 pp 1383ndash1393 2014
[6] A Marino ldquoA notch filter for ship detection with polarimetricSAR datardquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 6 no 3 pp 1219ndash12322013
[7] G Margarit J A B Milanes and A Tabasco ldquoOperationalship monitoring system based on Synthetic Aperture Radarprocessingrdquo Remote Sensing vol 1 no 3 pp 375ndash392 2009
[8] M Tello C Lopez-Martinez J Mallorqui T Tares and HGreidanus ldquoAdvances in unsupervised ship detection withmultiscale techniquesrdquo IEEE Geoscience and Remote SensingLetters vol 2 no 2 pp IVndash979ndashIVndash982 2009
[9] S-I Hwang and K Ouchi ldquoOn a novel approach using MLCCand CFAR for the improvement of ship detection by syntheticaperture radarrdquo IEEE Geoscience and Remote Sensing Lettersvol 7 no 2 pp 391ndash395 2010
[10] H M Finn and R S Johnson ldquoAdaptive detection mode withthreshold control as a function of spatially sampled clutter levelestimatesrdquo RCA Review vol 29 pp 414ndash468 1968
[11] P P Gandhi and S A Kassam ldquoAnalysis of CFAR processorsin homogeneous backgroundrdquo IEEE Transactions on Aerospaceand Electronic Systems vol 24 no 4 pp 427ndash445 1988
[12] G Gao L Liu L Zhao G Shi and G Kuang ldquoAn adaptive andfast CFAR algorithm based on automatic censoring for targetdetection in high-resolution SAR imagesrdquo IEEE Transactionson Geoscience and Remote Sensing vol 47 no 6 pp 1685ndash16972009
[13] R Zhang Y ZouW Sheng XMa andHWang ldquoAn improvedCFAR detector for non-homogeneous clutter environmentrdquo inProceedings of the International Symposium on Signals Systemsand Electronics (ISSSE rsquo10) vol 2 pp 1ndash4 September 2010
[14] M E Smith and P K Varshney ldquoIntelligent CFAR processorbased on data variabilityrdquo IEEE Transactions on Aerospace andElectronic Systems vol 36 no 3 pp 837ndash847 2000
[15] A C Frery H-J Muller C D C F Yanasse and S J SSantrsquoAnna ldquoAmodel for extremely heterogeneous clutterrdquo IEEETransactions on Geoscience and Remote Sensing vol 35 no 3pp 648ndash659 1997
[16] H Goldman and I Bar-David ldquoAnalysis and application of theexcision CFAR detectorrdquo IEE Proceedings F CommunicationsRadar and Signal Processing vol 135 no 6 pp 563ndash575 1988
[17] G Gao ldquoStatistical modeling of SAR images a surveyrdquo Sensorsvol 10 no 1 pp 775ndash795 2010
[18] R Abdelfattah and J-M Nicolas ldquoInterferometric SAR coher-ence magnitude estimation using second kind statisticsrdquo IEEETransactions on Geoscience and Remote Sensing vol 44 no 7pp 1942ndash1953 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of


















