Remote Control SWAT Robot for NMBPD Team 2 Lazaro Galban Raul Galindo Daniel Oliu Advisor: Dr. Sabri...
14
Remote Control SWAT Robot for NMBPD Team 2 Lazaro Galban Raul Galindo Daniel Oliu Advisor: Dr. Sabri Tosunoglu
-
Upload
alexina-west -
Category
Documents
-
view
213 -
download
0
Transcript of Remote Control SWAT Robot for NMBPD Team 2 Lazaro Galban Raul Galindo Daniel Oliu Advisor: Dr. Sabri...

Remote Control SWAT Robot for NMBPD
Team 2
Lazaro GalbanRaul GalindoDaniel Oliu
Advisor: Dr. Sabri Tosunoglu

Overview
• Problem Statement• Metrics• Solution Concept• Design Alternatives• Conceptual Designs• Proposed Design• Division of Responsibilities • Conclusion

Problem Statement• The North Miami Beach Police Department (NMBPD) is in need of a
remote controlled vehicle.
• Currently Used Robot by NMBPD:• Remote Control Hobby Car
• Surveillance Camera• Weak Frame Suspension• Unable to Climb Stairs• Uncontrollable Speed• Designed for Flat Levels
• Remote Control• Remote for Hobby Car• Remote for Audio/Video Feedback

Metrics
Robot Specification
Gross Weight Limit 55 pounds
Robot Dimensions 16” x 8” x 6”
Power Supply
Rechargeable Ion
Battery
Level Arm Length 10’’
Radio Transmitter Frequency 2.4 GHz
Source: EVStudios.info

Solution Concept• Robot needs to be capable of the following:
• Climb Stairs• Controllable Speed• Carry Payload• Swappable Battery• Portable• Rotatable Camera
• Adjustable height• Low Cost

Design Alternatives
• HD2-S Remote Surveillance Treaded Robot
• Based Price $11,919.59• 38” x 20” x 9.5”• 2.4 GHz Frequency
• Talon Military Robot
• 115 lb (52 kg)• (OSHA allows only 56 lbs to
be carried by a person)

Design Alternatives (cont.)• 4WD WiFi Controlled ATR
• Base Price $3,550.00• Unable to Climb Stairs• 12.25” x 17.25” x 2.31”
• Lynxmotion Phoenix 3DOF Hexapod
• Base Price $261.35 • Small Size• Low Load Carrying
Capabilities

Design Alternatives (cont.)Displacement Type
Wheels Tracks Legs
Climbing 1 5 4
Simplicity 3 4 1
Cost 4 4 2
Maintenance 4 3 2
Speed 5 4 2
Weight 3 2 4
Payload Capacity
3 5 2
Total 23 27 17Scale: 1-55 = Most desirable

Conceptual Designs
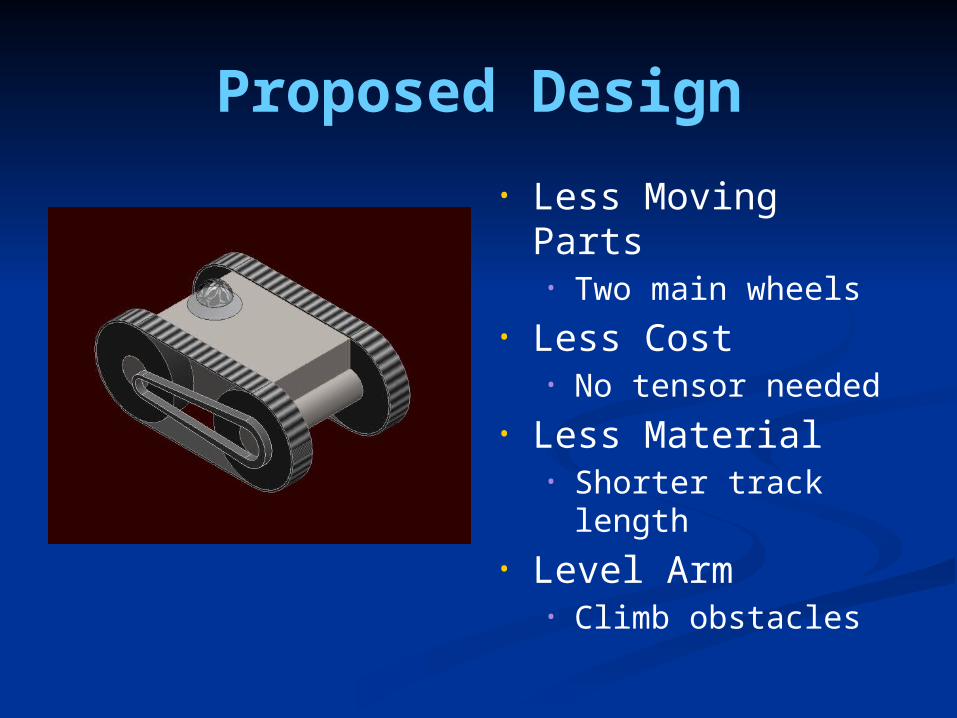
Proposed Design
• Less Moving Parts• Two main wheels
• Less Cost• No tensor needed
• Less Material• Shorter track length
• Level Arm• Climb obstacles

Timeline
Project Formulation
Design Alternatives
Proposed Design
Design and Analysis
Solidworks Modeling
Part List/Cost Analysis
Prototype Construction
Prototype Testing
Prototype Optimization
Mock Presentations
Report Preparation
Final Presentation
01/2
2/10
02/1
1/10
03/0
3/10
03/2
3/10
04/1
2/10
05/0
2/10
05/2
2/10
06/1
1/10
07/0
1/10
07/2
1/10
08/1
0/10
08/3
0/10
09/1
9/10
10/0
9/10
10/2
9/10
11/1
8/10
12/0
8/10
Start Date Completed Remaining

Recorded Project Hours
0
5
10
15
20
25
30
Lazaro GalbanRaul Galindo
Hu
man
Ho
urs
Lazaro Galban; 75
Raul Galindo; 77
Daniel Oliu; 75
(Current Total: 227 hours)

Division of Responsibilities
Raul Galindo Research and formulation of robot main frame body Implementation of lever arms for stair climbing
Lazaro Galban Design alternatives for robot rubber tract system and main frame
body Research current designs for the mobile platform
Daniel Oliu Design and research of robot controller for audio/video feedback Implementation of controller for robot commands.

Conclusion
• Design a low cost surveillance robot
• Ability to climb stairs and over obstacles
• Low Weight• Easy Portability