Regularized method of fundamental solutions for boundary identification in two-dimensional isotropic...
15
Regularized method of fundamental solutions for boundary identification in two-dimensional isotropic linear elasticity Liviu Marin ⇑ Institute of Solid Mechanics, Romanian Academy, 15 Constantin Mille, P.O. Box 1-863, 010141 Bucharest, Romania article info Article history: Received 1 August 2009 Received in revised form 7 February 2010 Available online 16 September 2010 Keywords: Linear elasticity Inverse geometric problem Method of fundamental solutions (MFS) Tikhonov regularization abstract We investigate the stable numerical reconstruction of an unknown portion of the boundary of a two- dimensional domain occupied by an isotropic linear elastic material from a prescribed boundary condi- tion on this part of the boundary and additional displacement and traction measurements (i.e. Cauchy data) on the remaining known portion of the boundary. This inverse geometric problem is approached by combining the method of fundamental solutions (MFS) and the Tikhonov regularization method, whilst the optimal value of the regularization parameter is chosen according to the discrepancy principle. Various geometries are considered, i.e. convex and non-convex domains with a smooth or piecewise smooth boundary, in order to show the numerical stability, convergence, consistency and computational efficiency of the proposed method. Ó 2010 Elsevier Ltd. All rights reserved. 1. Introduction In direct problems in solid mechanics, one has to determine the response of a system when the governing system of partial differ- ential equations (equilibrium equations), the constitutive and kinematics equations, the initial and boundary conditions for the displacement and/or traction vectors and the geometry of the do- main occupied by the solid are all known. The existence and uniqueness of the solution to such problems have been well estab- lished, see e.g. Knops and Payne (1971). However, if at least one of the conditions enumerated above is partially or entirely lacking then one has to deal with an inverse problems. Moreover, it is well-known that inverse problems are in general unstable, in the sense that small measurement errors in the input data may ampli- fy significantly the errors in the solution, see e.g. Hadamard (1923). Over the last decades, inverse problems have been extensively treated in solid mechanics, while an overview of these develop- ments is available in Bonnet and Constantinescu (2005). An important class of inverse problems in solid mechanics is represented by inverse geometrical problems which can be divided into the following subclasses: (i) shape and design optimization; (ii) identification of defects, e.g. cavities or inclusions; and (iii) identification of an unknown boundary. For problems belonging to the last subclass enumerated above, both Dirichlet and Neu- mann data, i.e. Cauchy data, can be measured on an accessible and known part of the boundary of the solution domain, whilst either Dirichlet or Neumann condition is prescribed on the remain- ing, inaccessible and unknown part of the boundary. The goal is to reconstruct the unknown part of the boundary from the aforemen- tioned available boundary conditions. There are several important studies in the literature investigating the boundary identification problem for various partial differential operators; however, most of these papers are devoted to the Laplace equation. Aparicio and Pidcock (1996) studied the problem of determining a part of the boundary of a domain, where a potential satisfies the Laplace equa- tion, and proposed two methods to solve this problem, provided that the potential is monotonic along the unknown boundary. The stability of determining a portion of the boundary, which en- closes a two-dimensional bounded domain where the Laplace equation is satisfied, from Cauchy data was undertaken by Beretta and Vessela (1998). Various conditional stability estimates for this problem, according to a priori assumptions on the regularity of the unknown sub-boundaries, was given by Bukhgeim et al. (1999). Hsieh and Kassab (1986) proposed a general numerical method to determine an unknown boundary for heat conduction problems which is independent of the type of condition imposed on the un- known boundary. Huang and Chao (1997) investigated a steady- state shape identification problem by using both the Levenberg– Marquardt and the conjugate gradient methods. Their work was la- ter extended by Huang and Tsai (1997) to a transient inverse geo- metrical problem in identifying the irregular boundary configurations from external measurements using the boundary element method (BEM). Park and Ku (2001) considered the inverse problem of identifying the boundary shape of a domain from boundary temperature measurements, when the temperature is dominated by natural convection. Lesnic et al. (2002) approached the boundary determination in potential corrosion damage from 0020-7683/$ - see front matter Ó 2010 Elsevier Ltd. All rights reserved. doi:10.1016/j.ijsolstr.2010.08.010 ⇑ Tel.: +40 0 745 461023. E-mail addresses: [email protected], [email protected] International Journal of Solids and Structures 47 (2010) 3326–3340 Contents lists available at ScienceDirect International Journal of Solids and Structures journal homepage: www.elsevier.com/locate/ijsolstr
-
Upload
liviu-marin -
Category
Documents
-
view
213 -
download
0
Transcript of Regularized method of fundamental solutions for boundary identification in two-dimensional isotropic...

International Journal of Solids and Structures 47 (2010) 3326–3340
Contents lists available at ScienceDirect
International Journal of Solids and Structures
journal homepage: www.elsevier .com/locate / i jsolst r
Regularized method of fundamental solutions for boundary identificationin two-dimensional isotropic linear elasticity
Liviu Marin ⇑Institute of Solid Mechanics, Romanian Academy, 15 Constantin Mille, P.O. Box 1-863, 010141 Bucharest, Romania
a r t i c l e i n f o a b s t r a c t
Article history:Received 1 August 2009Received in revised form 7 February 2010Available online 16 September 2010
Keywords:Linear elasticityInverse geometric problemMethod of fundamental solutions (MFS)Tikhonov regularization
0020-7683/$ - see front matter � 2010 Elsevier Ltd. Adoi:10.1016/j.ijsolstr.2010.08.010
⇑ Tel.: +40 0 745 461023.E-mail addresses: [email protected], liviu@im
We investigate the stable numerical reconstruction of an unknown portion of the boundary of a two-dimensional domain occupied by an isotropic linear elastic material from a prescribed boundary condi-tion on this part of the boundary and additional displacement and traction measurements (i.e. Cauchydata) on the remaining known portion of the boundary. This inverse geometric problem is approachedby combining the method of fundamental solutions (MFS) and the Tikhonov regularization method,whilst the optimal value of the regularization parameter is chosen according to the discrepancy principle.Various geometries are considered, i.e. convex and non-convex domains with a smooth or piecewisesmooth boundary, in order to show the numerical stability, convergence, consistency and computationalefficiency of the proposed method.
� 2010 Elsevier Ltd. All rights reserved.
1. Introduction
In direct problems in solid mechanics, one has to determine theresponse of a system when the governing system of partial differ-ential equations (equilibrium equations), the constitutive andkinematics equations, the initial and boundary conditions for thedisplacement and/or traction vectors and the geometry of the do-main occupied by the solid are all known. The existence anduniqueness of the solution to such problems have been well estab-lished, see e.g. Knops and Payne (1971). However, if at least one ofthe conditions enumerated above is partially or entirely lackingthen one has to deal with an inverse problems. Moreover, it iswell-known that inverse problems are in general unstable, in thesense that small measurement errors in the input data may ampli-fy significantly the errors in the solution, see e.g. Hadamard (1923).Over the last decades, inverse problems have been extensivelytreated in solid mechanics, while an overview of these develop-ments is available in Bonnet and Constantinescu (2005).
An important class of inverse problems in solid mechanics isrepresented by inverse geometrical problems which can be dividedinto the following subclasses: (i) shape and design optimization;(ii) identification of defects, e.g. cavities or inclusions; and (iii)identification of an unknown boundary. For problems belongingto the last subclass enumerated above, both Dirichlet and Neu-mann data, i.e. Cauchy data, can be measured on an accessibleand known part of the boundary of the solution domain, whilsteither Dirichlet or Neumann condition is prescribed on the remain-
ll rights reserved.
sar.bu.edu.ro
ing, inaccessible and unknown part of the boundary. The goal is toreconstruct the unknown part of the boundary from the aforemen-tioned available boundary conditions. There are several importantstudies in the literature investigating the boundary identificationproblem for various partial differential operators; however, mostof these papers are devoted to the Laplace equation. Aparicio andPidcock (1996) studied the problem of determining a part of theboundary of a domain, where a potential satisfies the Laplace equa-tion, and proposed two methods to solve this problem, providedthat the potential is monotonic along the unknown boundary.The stability of determining a portion of the boundary, which en-closes a two-dimensional bounded domain where the Laplaceequation is satisfied, from Cauchy data was undertaken by Berettaand Vessela (1998). Various conditional stability estimates for thisproblem, according to a priori assumptions on the regularity of theunknown sub-boundaries, was given by Bukhgeim et al. (1999).Hsieh and Kassab (1986) proposed a general numerical methodto determine an unknown boundary for heat conduction problemswhich is independent of the type of condition imposed on the un-known boundary. Huang and Chao (1997) investigated a steady-state shape identification problem by using both the Levenberg–Marquardt and the conjugate gradient methods. Their work was la-ter extended by Huang and Tsai (1997) to a transient inverse geo-metrical problem in identifying the irregular boundaryconfigurations from external measurements using the boundaryelement method (BEM). Park and Ku (2001) considered the inverseproblem of identifying the boundary shape of a domain fromboundary temperature measurements, when the temperature isdominated by natural convection. Lesnic et al. (2002) approachedthe boundary determination in potential corrosion damage from

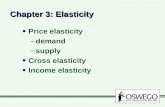
Fig. 1. Geometry and boundary discretization of the problem.
L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3327
Cauchy data available on the known portion of the boundary byemploying a regularized BEM minimization technique. Their meth-od was also extended to the Lamé system of linear elasticity andHelmholtz-type equations both in two dimensions by Marin andLesnic (2003) and Marin (2006), respectively.
The method of fundamental solutions (MFS) is a meshless/meshfree boundary collocation method which is applicable toboundary value problems for which a fundamental solution ofthe operator in the governing equation is known. In spite of thisrestriction, it has, in recent years, become very popular primarilybecause of the ease with which it can be implemented, in particu-lar for problems in complex geometries. Since its introduction as anumerical method by Mathon and Johnston (1977), it has beensuccessfully applied to a large variety of physical problems, an ac-count of which may be found in the survey papers by Fairweatherand Karageorghis (1998), Golberg and Chen (1999), and Fairweath-er et al. (2003, 2004). The ease of implementation of the MFS forproblems with complex boundaries makes it an ideal candidatefor problems in which the boundary is of major importance or re-quires special attention, such as inverse problems. For these rea-sons, the MFS has been used increasingly over the last decade forthe numerical solution of the aforementioned classes of problems.For example, this meshless method has been successfully appliedto solving inverse problems associated with the heat equation(Hon and Wei, 2004, 2005; Mera, 2005; Dong et al., 2007; Marin,2008; Shigeta and Young, 2009), linear elasticity (Marin and Lesnic,2004; Marin, 2005a; Fam and Rashed, 2009), steady-state heatconduction in functionally graded materials (FGMs) (Marin,2005b, 2009), Helmholtz-type equations (Marin, 2005c; Marinand Lesnic, 2005a; Jin and Zheng, 2006), biharmonic equation(Marin and Lesnic, 2005b; Zeb et al., 2008), Stokes problems (Chenet al., 2005), source reconstruction in heat conduction problems(Jin and Marin, 2007; Yan et al., 2008; Nili Ahmadabadi et al.,2009), etc.
Hon and Wu (2000) were the first authors who attempted tosolve an inverse geometric problem by a meshless method, usingradial basis functions to approximate the solution. Apparently,the MFS was used for the first time in the solution of an inverseboundary determination problem in Mera and Lesnic (2005),where the authors solved the corresponding inverse problem asso-ciated with the three-dimensional Laplace equation arising in po-tential corrosion damage. Zeb et al. (2008) applied the MFS,without any physical constraints though, to the solution of an in-verse boundary determination problem associated with the two-dimensional biharmonic equation, while in Hon and Li (2008),the MFS was applied to solving one- and two-dimensional inverseboundary determination heat conduction problems. A combinedMFS–Tikhonov regularization method was recently employed byMarin et al. (submitted for publication) and Marin (2009) to recon-struct the inaccessible part of the boundary of the domain fromCauchy data on the remaining accessible portion of the boundary,for two-dimensional harmonic problems and FGMs, respectively.
To our knowledge, the application of the MFS to inverse geo-metric problems for two-dimensional linear elastic materials, hasnot, as yet, been investigated. Hence we address the followingproblem: In the framework of two-dimensional isotropic linearelasticity, determine in a stable manner the shape of an inaccessi-ble and unknown part of the boundary of the solution domain,from a prescribed boundary condition on this portion of theboundary and Cauchy data available on the remaining, accessibleand known part of the boundary. This inverse problem is ap-proached using the Tikhonov first-order regularization method,in conjunction with Morozov’s discrepancy principle for selectingthe optimal value of the regularization parameter. Various geome-tries are considered in order to show the numerical stability, con-vergence, accuracy and efficiency of the proposed method.
2. Mathematical formulation
Consider an open bounded domain X � R2 occupied by an iso-tropic linear elastic solid and assume that X is bounded by a curve@X, such that @X = @X1 [ @X2, where @X1 – ;, @X2 – ; and@X1 \ @X2 = ;. We also assume that the part of the boundary @X1
is the graph of a known Lipschitz function /1 : [�r,r] ? [0,1),whilst the remaining boundary @X2 is the graph of an unknownLipschitz function /2 : ½�r; r� ! R, where /1(x) > /2(x) for all x 2(�r,r). Moreover, both boundaries @X1 and @X2 intersect the x1-coordinate axis at the points (±r,0), see e.g. Fig. 1.
The equilibrium equations are given by, see Landau and Lifshitz(1986),
LuðxÞ � �r � rðuðxÞÞ ¼ bðxÞ; x 2 X; ð1Þ
where b is the body force acting on the solid and r(u) is the stresstensor associated with the displacement vector u which is given byHooke’s law, namely
r uðxÞð Þ ¼ GðruðxÞ þ ruðxÞTÞ þ 2mG1� 2m
ðr � uðxÞÞI; x 2 X: ð2Þ
Here m is the Poisson ratio, G is the shear modulus, I = [dij]16i,j62 isthe identity matrix in R2�2 and dij is the Kronecker delta tensor.We now let n(x) be the unit outward normal vector at @X andt(x) be the traction vector at a point x 2 @X, i.e.
tðxÞ � rðuðxÞÞ � nðxÞ: ð3Þ
From Eqs. (1)–(3) it follows that the Lamé differential operator ofisotropic linear elasticity, L, and the traction vector, t, at the bound-ary @X can be expressed as
LuðxÞ ¼ �Gr � ðruðxÞ þ ruðxÞTÞ þ 2mG1� 2m
rðr � uðxÞÞ; x 2 X;
ð4Þ
and
tðxÞ ¼ GðruðxÞ þ ruðxÞTÞ þ 2mG1� 2m
ðr � uðxÞÞI� �
� nðxÞ; x 2 @X;
ð5Þ
respectively.We consider the following inverse geometric problem for two-
dimensional isotropic linear elastic materials in the absence ofbody forces, i.e. b � 0 in Eq. (1):

3328 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
Determine the unknown and inaccessible boundary @X2 � @X,@X2 – ;, such that the displacement vector u satisfies the equilib-rium equations, both the displacement and traction vectors, i.e.Cauchy data, can be measured on the known and accessible partof the boundary, @X1, and either Dirichlet, or Neumann, or mixedboundary conditions are prescribed on @X2, namely
LuðxÞ ¼ 0; x 2 X; ð6aÞuðxÞ ¼ ~uðxÞ; x 2 @X1; ð6bÞtðxÞ ¼ ~tðxÞ; x 2 @X1; ð6cÞ
KuðxÞ þ ðI� KÞ tðxÞ ¼ K ~uðxÞ þ ðI� KÞ~tðxÞ; x 2 @X2: ð6dÞIn Eq. (6d) the matrix K = [Kij]16i,j62 defines the type of boundaryconditions available on @X2, where Kij = Kidij and Ki 2 {0,1} for i,j = 1,2.
Although the inverse geometric problem Eqs. (6a)–(6d) mayhave a unique solution, it is well-known, see e.g. Tikhonov andArsenin (1986), that this solution is unstable with respect to smallperturbations in the data on @X1. Thus the problem is ill-posed andwe cannot use a direct approach, such as the least-squares method,to solve the system of linear equations which arises from the dis-cretization of the partial differential Eq. (6a) and the boundary con-ditions (6b)–(6d). Therefore, regularization methods are requiredin order to solve accurately the inverse geometric problem (6a)–(6d) for two-dimensional isotropic linear elastic materials.
3. Method of fundamental solutions
3.1. Boundary discretization
The boundary @X of the solution domain X is discretized byselecting the N1 boundary points z(i), i = 1, . . . ,N1, on the knownboundary @X1 and the N2 boundary points zðN1þiÞ; i ¼ 1; . . . ;N2, onthe unknown boundary @X2, such that N = N1 + N2. Consequently,the boundary @X is approximated by
@X � @ eX ¼ [N1þN2
i¼1
CðiÞ; where CðiÞ ¼ ½zðiÞ; zðiþ1Þ�;
i ¼ 1; . . . ;N1 þ N2; ð7Þ
with the following convention zðN1þN2þ1Þ ¼ zð1Þ. Note that as a directconsequence of the discretization given by Eq. (7), the known and un-known boundaries @X1 and @X2, respectively, are approximated by
@X1 � @ eX1 ¼[N1
i¼1
CðiÞ and @X2 � @ eX2 ¼[N1þN2
i¼N1þ1
CðiÞ: ð8Þ
Further, we consider the MFS boundary collocation points to be themidpoints x(i), i = 1, . . . ,N1 + N2, of each segment C(i),i = 1, . . . ,N1 + N2, namely
xðiÞ ¼ 12ðzðiÞ þ zðiþ1ÞÞ ¼ xðiÞðzðiÞ; zðiþ1ÞÞ; i ¼ 1; . . . ;N1 þ N2: ð9Þ
In this way, the outward unit normal vector n to the approximateboundary @ eX at the MFS boundary collocation points is given by
nðxðiÞÞ ¼ 1kzðiþ1Þ � zðiÞk zðiþ1Þ
2 � zðiÞ2 ;�zðiþ1Þ1 þ zðiÞ1
� �¼ nðiÞðzðiÞ; zðiþ1ÞÞ; i ¼ 1; . . . ;N1 þ N2: ð10Þ
In this study, the boundary points z(i), i = 1, . . . ,N1 + N2, are chosensuch that their x1-components are uniformly distributed on the seg-ment [�r,r], while the x2-components are expressed as functions ofthe corresponding x1-components. More specifically, we use the fol-lowing values for the boundary points z(i), i = 1, . . . ,N1 + N2, see alsoFig. 1,
zðiÞ ¼ zðiÞ1 ;zðiÞ2
� �; i¼1; . . . ;N1þN2; ð11aÞ
zðiÞ1 ¼ r 1�2i�1N1
� �; zðiÞ2 ¼/1 zðiÞ1
� �; i¼1; . . . ;N1; ð11bÞ
zðN1þiÞ1 ¼�r 1�2
i�1N2
� �; zðN1þiÞ
2 ¼/2 zðN1þiÞ1
� �; i¼1; . . . ;N2; ð11cÞ
zð1Þ ¼ ðr;0Þ; zðN1þ1Þ ¼ ð�r;0Þ: ð11dÞ
Hence from Eqs. (9)–(11) it follows that the unknown boundary@X2 is completely determined by the vector z ¼
zðN1þ2Þ2 ; . . . ; zðN1þN2Þ
2
h iT2 RN2�1.
3.2. MFS approximation
The fundamental solution U = [Uij]16i,j62 of the Lamé system ofisotropic linear elasticity (1), or equivalently (6a), for the displace-ment vector is given by, see Aliabadi (2002)
Uijðx; nÞ ¼ �1
8pGð1� mÞ ð3� 4mÞ ln kx� nkdij �xi � ni
kx� nkxj � nj
kx� nk
� �;
x 2 X; i; j ¼ 1;2; n 2 R2 nX; ð12Þ
where n is a singularity or source point, and m ¼ m in the plane strainstate and m ¼ m=ð1þ mÞ in the plane stress state.
The main idea of the MFS consists of the approximation of thedisplacement vector in the solution domain and on its boundaryby a linear combination of fundamental solutions with respect toM singularities n(‘), ‘ = 1, . . . ,M, in the form
uðxÞ � uMðc; n; xÞ ¼XM
‘¼1
Uðx; nð‘ÞÞcð‘Þ; x 2 X; ð13Þ
where c 2 R2M is a vector containing the components of the un-
known two-dimensional vectors cð‘Þ ¼ cð‘Þ1 ; cð‘Þ2
h iT, ‘ = 1, . . . ,M, and
n 2 R2M is a vector containing the coordinates of the singularitiesn(‘), ‘ = 1, . . . ,M.
On taking into account the definitions of the stress tensor (2),the traction vector (5) and the fundamental solution for the dis-placement vector (12) then the traction vector at a point x onboundary @X defined by the outward unit normal vector n(x)can be approximated by
tðxÞ � tMðc; n; xÞ ¼XM
‘¼1
Tðx; nð‘ÞÞcð‘Þ; x 2 @X; ð14Þ
where T = [Tij]16i,j62 is the fundamental solution for the tractionvector, whose components are given by
T1jðx; nÞ ¼2G
1� 2mð1� mÞ @U1jðx; nÞ
@x1þ m
@U2jðx; nÞ@x2
� �n1ðxÞ
þ G@U1jðx; nÞ
@x2þ @U2jðx; nÞ
@x1
� �n2ðxÞ; ð15aÞ
T2jðx; nÞ ¼2G
1� 2m@U1jðx; nÞ
@x2þ @U2jðx; nÞ
@x1
� �n1ðxÞ
þ G m@U1jðx; nÞ
@x1þ ð1� mÞ @U2jðx; nÞ
@x2
� �n2ðxÞ; ð15bÞ
for x 2 @X, n 2 R2 nX and j = 1,2.According to the MFS approximations (13) and (14), the discret-
ized version of the boundary conditions (6b)–(6d) recasts as

L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3329
XM
‘¼1
X2
j¼1
UijðxðkÞ; nð‘ÞÞcð‘Þj ¼ ~uiðxðkÞÞ; k ¼ 1; . . . ;N1; i ¼ 1;2; ð@X1Þ
ð16aÞ
XM
‘¼1
X2
j¼1
TijðxðkÞ; nð‘ÞÞcð‘Þj ¼ ~tiðxðiÞÞ; k ¼ 1; . . . ;N1; i ¼ 1;2; ð@X1Þ
ð16bÞ
XM
‘¼1
X2
j¼1
½Ki UijðxðkÞ; nð‘ÞÞ þ ð1�KiÞTijðxðkÞ; nð‘ÞÞ�cð‘Þj
¼ Ki ~uiðxðkÞÞ þ 1�Kið Þ~tiðxðkÞÞ;k ¼ N1 þ 1; . . . ;N1 þ N2; i ¼ 1;2: @X2ð Þ ð16cÞ
Eqs. (6a)–(6c) represent a system of 4N1 + 2N2 nonlinearalgebraic equations with 2M + N2 � 1 unknowns, namely the MFS
coefficients c 2 R2M and the x2-coordinates z ¼hzðN1þ2Þ
2 ; . . . ;
zðN1þN2Þ2
iT2 RN2�1 of the boundary points that determine the un-
known boundary @X2. It should be noted that in order to uniquelydetermine the solution ðc; zÞ 2 R2M � RN2�1 of the system of nonlin-ear algebraic Eqs. (6a)–(6c), the number N1 of MFS boundary collo-cation points on the known boundary @X1 and the number M ofsingularities must satisfy the inequality 2M � 1 6 4N1 + N2. How-ever, the system of nonlinear algebraic Eqs. (6a)–(6c) cannot besolved by direct methods, such as the least-squares method, sincesuch an approach would produce a highly unstable solution.
3.3. MFS boundary collocation points and singularities
In order to implement the MFS, the location of the singularitieshas to be determined and this is usually achieved by consideringeither the static or the dynamic approach. In the static approach,the singularities are pre-assigned and kept fixed throughout thesolution process, whilst in the dynamic approach, the singularitiesand the unknown coefficients are determined simultaneously dur-ing the solution process, see Fairweather and Karageorghis (1998).For nonlinear systems, the uniqueness of the solution is not alwaysguaranteed and it is computationally much more expensive. Thusthe dynamic approach transforms the inverse geometric probleminto a more difficult nonlinear ill-posed problem. Tankelevichet al. (2006) considered the singularities located on a so-calledpseudo-boundary, which has the same shape as the boundary ofthe domain, and the problem is solved for a sequence of such pseu-do-boundaries, whilst the optimal pseudo-boundary is taken to bethe one for which boundary conditions are satisfied most accu-rately. Mitic and Rashed (2004) have shown that the distributionand number of the singularities are not, in general, important un-der certain conditions, in the sense that the number of singularitiesshould reflect the degrees of freedom inherent in the boundaryconditions of the problem. Hence the dynamic approach for deter-mining the optimal location of the singularities might be unneces-sary. Therefore, we have decided to employ the static approach inour computations with the singularities, n(‘), ‘ = 1, . . .,M, located onthe boundary, @XS, of the disk of radius RS and centered at the ori-
gin, XS ¼ x ¼ ðx1; x2Þjx21 þ x2
2 < R2S
n o, that encloses the solution do-
main, as well as its boundary, i.e. X � XS.
4. Description of the algorithm
In this section, we present a numerical scheme for the stablesolution of the system of nonlinear algebraic Eqs. (16a)–(16c) aswell as details regarding the numerical implementation of the pro-posed method.
4.1. Tikhonov regularization method
The inverse geometric problem investigated in this paper issolved, in a stable manner, by minimizing the following Tikhonovregularization functional, see Tikhonov and Arsenin (1986)
F kð�; �Þ : R2M � RN2�1 ! ½0;1Þ; F kðc; zÞ ¼ F LSðc; zÞ þRkðzÞ;ð17Þ
where F LS is the least-squares functional associated with the in-verse geometric problem investigated in this study, Rk is the regu-larization term to be specified and k > 0 is the regularizationparameter to be prescribed.
The least-squares functional, F LS, in Eq. (17) is given by
F LSð�; �Þ : R2M � RN2�1 ! ½0;1Þ;
F LSðc; zÞ ¼12
XN1
i¼1
f½F1ðc;n; xðiÞÞ�2 þ ½F2ðc;n; xðiÞÞ�2g
þ 12
XN1þN2
i¼N1þ1
½F 3ðc;n; xðiÞÞ�2;
ð18Þ
where
F1ðc;n; xðiÞÞ ¼ k~uðxðiÞÞ � uMðc;n; xðiÞÞk= max16m6N1
k~uðxðmÞÞk;
i ¼ 1; . . . ;N1; ð19aÞ
F2ðc;n; xðiÞÞ ¼ k~tðxðiÞÞ � tMðc;n; xðiÞÞk= max16m6N1
k~tðxðmÞÞk;
i ¼ 1; . . . ;N1; ð19bÞ
F3ðc;n; xðiÞÞ ¼ kK½~uðxðiÞÞ � uMðc;n; xðiÞÞ�k= max16m6N2
k~uðxðN1þmÞÞk
þ k I� Kð Þ½~tðxðiÞÞ � tMðc;n; xðiÞÞ�k= max16m6N2
k~tðxðN1þmÞÞk;
i ¼ N1 þ 1; . . . N1 þ N2: ð19cÞIn this paper, the regularization term, Rk, in Eq. (17) was chosen
to be the Tikhonov first-order regularization term, namely
Rkð�Þ : RN2�1 ! ½0;1Þ; RkðzÞ ¼ kkz0k2: ð20Þ
Here z0 ¼ zðN1þ2Þ2 � zðN1þ1Þ
2 ; . . . ; zðN1þN2þ1Þ2 � zðN1þN2Þ
2
h iTdenotes an
approximation to the first-order derivative to the function /2, keep-
ing in mind that zðiþ1Þ1 � zðiÞ1 , i = N1, . . . ,N1 + N2, is constant.
It should be emphasized that the zeroth-order Tikhonov reg-ularization procedure, which is based on penalizing the norm ofthe solution, i.e. RkðzÞ ¼ kkzk2 in Eq. (17), rather than its deriv-ative, i.e. RkðzÞ ¼ kkz0k2, did not produce satisfactorily accurateand stable results for the unknown boundary @X2. This observa-tion is consistent with the results obtained by Peneau et al.(1966), Lesnic et al. (2002), Marin et al. (submitted for publica-tion), Marin and Lesnic (2003), and Marin (2006, 2009) whohave solved a similar problem for the Laplace equation, theLamé system, Helmholtz-type equations, and functionally-gradedmaterials, respectively. However, Zeb et al. (2008) successfullyemployed the zeroth-order Tikhonov regularization functional,without imposing any physical constraints on the x2-coordinatesof the boundary @X2.
4.2. Physical constraints
In order to retrieve an accurate and physically correct numericalsolution of the inverse geometric problem investigated herein, theTikhonov first-order functional given by Eq. (17) is minimized sub-ject to the following simple bounds imposed for the components of
the unknown vector z ¼ zðN1þ2Þ2 ; . . . ; zðN1þN2Þ
2
h iT
2 RN2�1:

3330 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiR2
S � zðiÞ1
� �2r
< zðiÞ2 < /1 zðiÞ2
� �; i ¼ N1 þ 2; . . . ;N1 þ N2: ð21Þ
The simple bounds (21) require that the x2-coordinates of theunknown boundary @X2 are situated below those correspondingto the known boundary @X1, while, at the same time, the singular-ities are located outside X. Alternatively, one can impose differentlower and/or upper bounds for the components of the unknownvector z 2 RN2�1, provided that some additional a priori informa-tion about the location of the unknown boundary @X2 is known.
-1.0 -0.5 0.0 0.5 1.0x1
-1.0
-0.5
0.0
0.5
1.0
x21 known2 unknown
x2
-1.0 -0.5 0.0 0.5 1.0x1
-1.0
-0.5
0.0
0.5
1.0
x21 known2 unknown
x2
-1.0 -0.5 0x
-1.0
-0.5
0.0
0.5
1.0
x2
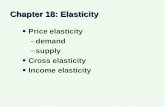
Fig. 2. Schematic diagram of the domain X, and the known and unknown bounda
To summarize, the Tikhonov regularization method solves aphysically constrained minimization problem using a smoothnessnorm in order to provide a stable solution which fits the dataand also has a minimum structure. More precisely, the MFS systemof nonlinear algebraic equations. (16a)–(16c) associated with theinverse geometric problem (6a)–(6d) for two-dimensional isotro-pic linear elastic materials is solved numerically by minimizingthe Tikhonov first-order regularization functional (17) with respectto the unknown vector ðc; zÞ 2 R2M � RN2�1 and subject to the phys-ical constraints (21), i.e.
-1.0 -0.5 0.0 0.5 1.0x1
-1.0
-0.5
0.0
0.5
1.0
1 known2 unknown
-1.0 -0.5 0.0 0.5 1.0x1
-1.0
-0.5
0.0
0.5
1.0
1 known2 unknown
.0 0.5 1.01
1 known2 unknown
ries @X1 and @X2, respectively, for the inverse geometric problems analyzed.

L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3331
ðck; zkÞ 2 R2M � RN2�1 : F kðck; zkÞ¼ minðc;zÞ2R2M�RN2�1
F kðc; zÞjz satisfies Eq:ð21Þf g: ð22Þ
4.3. Numerical implementation
The minimization of the constrained Tikhonov first-order regu-larization functional Eq. (22) is obtained using the NAG subroutineE04UNF (Numerical Algorithms Group Library Mark, 21, 2007)which minimizes a sum of squares subject to constraints. Thismay include simple bounds, linear constraints and smooth nonlin-ear constraints. Each iteration of the subroutine E04UNF includesthe following: (i) the solution of a quadratic programming sub-problem; (ii) a line search with an augmented Lagrangian function;and (iii) a quasi-Newton update of the approximate Hessian of theLagrangian function, see e.g. Gill et al. (1981).
To implement a code using E04UNF, we firstly denote byg ¼ ðc; zÞ 2 R2MþN2�1 the vector containing the unknowns of theMFS system of nonlinear algebraic equations (16a)–(16c) associ-ated with the inverse geometric problem for two-dimensional iso-tropic linear elastic solids given by Eqs. (6a)–(6d) i.e.
-1.0 -0.5
-0.6
-0.4
-0.2
0.0
x2
-1.0 -0.5-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
Expu pu
Fig. 3. Initial guess, exact and reconstructed values for the boundary @X2, obtained usingK = I, for (a) Example 2, and (b) Example 4.
g‘ ¼ cð‘Þ1 ; ‘ ¼ 1; . . . ;M; gMþ‘ ¼ cð‘Þ2 ; ‘ ¼ 1; . . . ;M;
g2Mþ‘ ¼ zðN1þ‘þ1Þ2 ; ‘ ¼ 1; . . . ;N2 � 1: ð23Þ
Then we re-write the Tikhonov first-order regularization functionaldefined by Eq. (17) in the following form:
F kð�Þ : RMþN2�1 ! ½0;1Þ;
F kðgÞ ¼12
X4N1þ2N2
i¼1½�yk � FkðgÞ�2|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
¼F LSðc;zÞ
þ 12
�y4N1þ2N2þ1 � F4N1þ2N2þ1ðgÞ �2|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
¼RkðzÞ
; ð24Þ
where the vectors FðgÞ ¼ ½F1ðgÞ; . . . ; F4N1þ2N2þ1ðgÞ�T 2 R4N1þ2N2þ1 and�y ¼ ½�y1; . . . ; �y4N1þ2N2þ1�T 2 R4N1þ2N2þ1 are given by
FkðgÞ ¼1
max16m6N1k~uðxðmÞÞkXM
‘¼1
X2
j¼1
U1jðxðkÞ; nð‘ÞÞcð‘Þj ;
�yk ¼~u1ðxðkÞÞ
max16m6N1k~uðxðmÞÞk; k ¼ 1; . . . ;N1; ð25aÞ
0.0 0.5 1.0x1
ExactGuesspu = 1%pu = 3%pu = 5%
0.0 0.5 1.0x1
act Guess= 1% pu = 3%= 5%
the least-squares method, perturbed displacements and exact tractions on @X1, and

3332 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
FN1þkðgÞ ¼1
max16m6N1k~uðxðmÞÞkXM
‘¼1
X2
j¼1
U2jðxðkÞ; nð‘ÞÞcð‘Þj ;
�yN1þk ¼~u2ðxðkÞÞ
max16m6N1k~uðxðmÞÞk; k ¼ 1; . . . ;N1; ð25bÞ
F2N1þkðgÞ ¼1
max16m6N1k~tðxðmÞÞkXM
‘¼1
X2
j¼1
T1jðxðkÞ; nð‘ÞÞcð‘Þj ;
�y2N1þk ¼~t1ðxðkÞÞ
max16m6N1k~tðxðmÞÞk; k ¼ 1; . . . ;N1; ð25cÞ
F3N1þkðgÞ ¼1
max16m6N1k~tðxðmÞÞkXM
‘¼1
X2
j¼1
T2jðxðkÞ; nð‘ÞÞcð‘Þj ;
�y3N1þk ¼~t2ðxðkÞÞ
max16m6N1k~tðxðmÞÞk; k ¼ 1; . . . ;N1; ð25dÞ
10-10 10-9 10-8 10-7 10-6
Regularizatio
0.02
0.04
0.07
0.1
0.2
0.4
RM
S er
ror e
pu pu pu
10-10 10-9 10-8 10-7 10-6
Regularizatio
0.04
0.07
0.1
0.2
0.4
0.7
RM
S er
ror e
pu pu pu
Fig. 4. The RMS error, ez, as a function of the regularization parameter, k, obtained using t@X1, and K = I, for (a) Example 2, and (b) Example 4.
F4N1þkðgÞ ¼XM
‘¼1
X2
j¼1
K1U1jðxðN1þkÞ; nð‘ÞÞ
max16m6N2k~uðxðN1þmÞÞk
"
þð1�K1ÞT1jðxðN1þkÞ; nð‘ÞÞ
max16m6N2k~tðxðN1þmÞÞk
#cð‘Þj ;
�y4N1þk¼K1~u1ðxðN1þkÞÞ
max16m6N2k~uðxðN1þmÞÞkþ 1�K1ð Þ~t1ðxðN1þkÞÞ
max16m6N2k~tðxðN1þmÞÞk;
k¼1; . . . ;N2; ð25eÞ
F4N1þN2þkðgÞ ¼XM
‘¼1
X2
j¼1
K2U2jðxðN1þkÞ; nð‘ÞÞ
max16m6N2k~uðxðN1þmÞÞk
"
þ 1�K2ð Þ T2jðxðN1þkÞ; nð‘ÞÞmax16m6N2k~tðxðN1þmÞÞk
#cð‘Þj ;
�y4N1þN2þk ¼ K2~u2ðxðN1þkÞÞ
max16m6N2k~uðxðN1þmÞÞk þ ð1�K2Þ
�~t2ðxðN1þkÞÞ
max16m6N2k~tðxðN1þmÞÞk; k ¼ 1; . . . ;N2; ð25fÞ
10-5 10-4 10-3 10-2 10-1 100
n parameter,
= 1%= 3%= 5%
10-5 10-4 10-3 10-2 10-1 100
n parameter,
= 1%= 3%= 5%
he Tikhonov regularization method, perturbed displacements and exact tractions on

L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3333
F4N1þ2N2þ1ðgÞ ¼ffiffiffiffiffiffi2kp XN2þ1
j¼2
zðN1þjÞ2 � zðN1þj�1Þ
2
� �2" #1=2
; �y4N1þ2N2þ1 ¼ 0:
ð25gÞ
We define the components of the gradient, JðgÞ ¼rF kðgÞ 2 Rð4N1þ2N2þ1Þ�ð2MþN2�1Þ, corresponding to the Tikhonovfirst-order regularization functional, as defined in Eq. (24). Itshould be mentioned that providing as many exact values for thecomponents of the gradient JðgÞ ¼ rF kðgÞ as possible to the NAGsubroutine E04UNF results not only in an improvement in theaccuracy of the numerical approximation of the unknown bound-ary, but also in a marked decrease in the computational time re-quired to minimize the Tikhonov first-order regularizationfunctional given by (17) with respect to the unknown vectorg 2 R2MþN2�1 and subject to the physical constraints (21).
5. Numerical results and discussion
It is the purpose of this section to present the performance ofthe proposed numerical method, namely the regularized MFS de-scribed in Section 4. To do so, we solve numerically the inversegeometric problem given by Eqs. (6a)–(6d) for an isotropic linear
10-10 10-9 10-8 10-7 10-6
Regularizati
0.001
0.01
0.1
1.0
Erro
r E
pu =pu =pu =
10-10 10-9 10-8 10-7 10-6
Regularizati
0.001
0.01
0.1
1.0
Erro
r E
pu =pu =pu =
Fig. 5. The residual error, ez, as a function of the regularization parameter, k, and the correregularization method, perturbed displacements and exact tractions (on @X1, and K = I,
elastic medium characterised by the material constants m = 0.3and G = 4.0 � 1010 N/m2, in the two-dimensional geometries whichare schematically presented in Figs. 2(a)–(e).
5.1. Examples
For all examples investigated in this paper, we consider the fol-lowing analytical solution in displacements
uðanÞi ðxÞ ¼ 1� m
2Gð1þ mÞ r0 xi; x ¼ ðx1; x2Þ 2 X; i ¼ 1;2; ð26Þ
in the domain X, which corresponds to a uniform hydrostatic stressstate, r(an)(x) = r0 I, where r0 = 1.50 � 1010 N/m2, and the boundarytractions given by
tðanÞi ðxÞ ¼ r0 niðxÞ; x ¼ ðx1; x2Þ 2 @X; i ¼ 1;2: ð27Þ
Example 1. We consider the unit disk X ¼ fx ¼ ðx1; x2Þjx2
1 þ x22 < r2g; r ¼ 1:0, whose boundary @X consists of two parts,
namely
@X1 ¼ x ¼ ðx1; x2Þ �1 6 x1 6 1; x2 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffir2 � x2
1
q���� �; ð28aÞ
10-5 10-4 10-3 10-2 10-1 100
on parameter,
1% (pu = 1%) 3% (pu = 3%) 5% (pu = 5%)
10-5 10-4 10-3 10-2 10-1 100
on parameter,
1% (pu = 1%) 3% (pu = 3%) 5% (pu = 5%)
sponding values of � used in the discrepancy principle, obtained using the Tikhonovfor (a) Example 2, and (b) Example 4.

3334 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
and
@X2 ¼ x ¼ ðx1; x2Þ �1 < x1 < 1; x2 ¼ �ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffir2 � x2
1
q���� �: ð28bÞ
Example 2. We consider the peanut-shaped domainX ¼ x ¼ ðx1; x2Þjx2
1 þ x22 < r2ðhÞ; h 2 ½0;2pÞ
� �, where r2ðhÞ ¼
cos2ðhÞ þ 14 sin2ðhÞ, which is bounded by the following curves
@X1 ¼ x ¼ ðx1; x2Þjx1 ¼ rðhÞ cosðhÞ; x2 ¼ rðhÞ sinðhÞ; h 2 ½0;p�f g;ð29aÞ
and
@X2 ¼ x ¼ ðx1; x2Þjx1 ¼ rðhÞ cosðhÞ; x2 ¼ rðhÞ sinðhÞ; h 2 ðp;2pÞf g:ð29bÞ
Example 3. We consider the domain X as the square�r=
ffiffiffi2p
; r=ffiffiffi2p� �2
, r = 1.0, rotated by an angle h = p/4, whoseboundary @X consists of two parts, namely
@X1 ¼ fx ¼ ðx1; x2Þj0 6 x1 6 r; x2 ¼ r � x1g[ fx ¼ ðx1; x2Þj � r 6 x1 6 0; x2 ¼ r þ x1g; ð30aÞ
and
-1.0 -0.5 0
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
-1.0 -0.5 0
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
Fig. 6. Initial guess, exact and reconstructed values for the boundary @X2, obtained using(b) tractions, ~t�j@X1
, for Example 1.
@X2 ¼ fx ¼ ðx1; x2Þj � r < x1 6 0; x2 ¼ �ðr þ x1Þg[ fx ¼ ðx1; x2Þj0 6 x1 < r; x2 ¼ � r � x1ð Þg: ð30bÞ
Example 4. We consider the hexagonal domain X inscribed in thecircle @Bð0; rÞ ¼ fx ¼ ðx1; x2Þjx2
1 þ x22 ¼ r2g; r ¼ 1:0, which is
bounded by the following curves
@X1 ¼ x ¼ ðx1; x2Þr2< x1 6 r; x2 ¼ r � x1ð Þ
ffiffiffi3p���n o
[ x ¼ ðx1; x2Þ �r26 x1 6
r2
; x2 ¼ r
ffiffiffi3p
2
�����( )
[ x ¼ ðx1; x2Þ �r 6 x1 <r2
; x2 ¼ r þ x1ð Þffiffiffi3p���n o
; ð31aÞ
and
@X2 ¼ x ¼ ðx1; x2Þ �r < x1 <r2
; x2 ¼ � r þ x1ð Þffiffiffi3p���n o
[ x ¼ ðx1; x2Þ �r26 x1 6
r2
; x2 ¼ �r
ffiffiffi3p
2
�����( )
[ x ¼ ðx1; x2Þr2< x1 < r; x2 ¼ � r � x1ð Þ
ffiffiffi3p���n o
: ð31bÞ
.0 0.5 1.0
x1
ExactGuesspu = 1%pu = 3%pu = 5%
.0 0.5 1.0
x1
ExactGuesspt = 1%pt = 3%pt = 5%
the Tikhonov regularization method, K = I, and noisy (a) displacements, ~u�j@X1, and

L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3335
Example 5. We consider the domain X as the rectangle
�rffiffiffi3p
=2; rffiffiffi3p
=2� �
� ð�r=2; r=2Þ, r = 1.0, rotated by an angle h = p/
6, whose boundary @X consists of two parts, namely
@X1 ¼ x ¼ ðx1; x2Þr26 x1 6 r; x2 ¼ r � x1ð Þ
ffiffiffi3p���n o
[ x ¼ ðx1; x2Þ �r 6 x1 6r2
; x2 ¼ r þ x1ð Þffiffiffi3p
3
�����( )
; ð32aÞ
and
@X2 ¼ x ¼ ðx1; x2Þ �r < x1 6 �r2
; x2 ¼ � r þ x1ð Þffiffiffi3p���n o
[ x ¼ ðx1; x2Þ �r26 x1 < r; x2 ¼ � r � x1ð Þ
ffiffiffi3p
3
�����( )
: ð32bÞ
The inverse geometric problems investigated in this paper havebeen solved for K = I and K = 0, i.e. for Dirichlet and Neumann con-ditions on the unknown boundary, respectively, with the mentionthat considering mixed boundary conditions on @X, i.e.K = diag[1,0] or K = diag[0,1], does not change significantly theaccuracy of the numerical results retrieved with the proposed algo-
-1.0 -0.5 0-0.6
-0.4
-0.2
0.0
x2
(a) Λ = I: Perturbed d
-1.0 -0.5 0
-0.6
-0.4
-0.2
0.0
x2
(b) Λ = 0: Perturbe
Fig. 7. Initial guess, exact and reconstructed values for the boundary @X2, obtained usinand (b) K = 0, for Example 2.
rithm. Furthermore, the uniform distribution of both the MFSboundary collocation points x(i), i = 1, . . . ,N, and the singularitiesn(j), j = 1, . . . ,M, as described in Section 3, while the numbers ofMFS boundary collocation points corresponding to the known andunknown boundaries, the number of singularities and the radiusof the disk on whose boundary the singularities are situated weretaken to be N1 = N2 = 12, (N = N1 + N2), M = N and RS = 2.0,respectively.
For all examples investigated in this paper, the Tikhonov first-order regularization functional (17) has been minimized subjectto the physical constraints (21) with /1 � 0 and this is consistentwith the shape of the unknown boundary @X2 considered in Exam-ples 1–5, see Eqs. (28b), (29b), (30b), (31b) and (32b). Moreover, inall examples, the initial guesses for the unknown MFS coefficients
cð‘Þ ¼ cð‘Þ1 ; cð‘Þ2
h iT, ‘ = 1, . . . ,M, and the unknown x2-coordinates
z ¼ zðN1þ2Þ2 ; . . . ; zðN1þN2Þ
2
h iT
of the boundary points that determine
the unknown boundary @X2 were taken as:
gðj�1ÞMþ‘ ¼ cð‘Þj ¼ 1:0; ‘ ¼ 1; . . . ;M; j ¼ 1;2;
g2Mþ‘ ¼ zðN1þ‘þ1Þ2 ¼ �10�15; ‘ ¼ 1; . . . ;N2 � 1: ð33Þ
.0 0.5 1.0
x1
ExactGuesspu = 1%pu = 3%pu = 5%
isplacements on ∂Ω1
.0 0.5 1.0
x1
ExactGuesspt = 1%pt = 3%pt = 5%
d tractions on ∂Ω1
g the Tikhonov regularization method, perturbed Cauchy data on @X1, and (a) K = I,

3336 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
5.2. Numerical results obtained without regularization
In order to simulate the inherent inaccuracies in the measureddata on the accessible and known boundary, @X1, we assume thatthe exact displacement, uj@X1
¼ uðanÞj@X1, and/or traction,
tj@X1¼ tðanÞj@X1
, vectors have been perturbed as
~u�i j@X1¼ uij@X1
þ dui; dui ¼ G05DDFð0;ruÞ;ru ¼max
@X1
juij � ðpu=100Þ; i ¼ 1;2; ð34Þ
and
~t�i j@X1¼ tij@X1
þ dti; dti ¼ G05DDFð0;rtÞ;rt ¼max
@X1
jtij � ðpt=100Þ; i ¼ 1;2; ð35Þ
respectively. Here dui and dti, i = 1,2, are Gaussian random variableswith mean zero and standard deviations ru and rt, respectively,generated by the NAG subroutine G05DDF (Numerical AlgorithmsGroup Library Mark, 2007, 21), while pu% and pt% are the percent-ages of additive noise included into the input boundary displace-ment, uj@X1
, and traction vectors, tj@X1, respectively.
-1.0 -0.5 0
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
-1.0 -0.5 0
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
Fig. 8. Initial guess, exact and reconstructed values for the boundary @X2, obtained using(b) tractions, ~t�j@X1
, for Example 3.
The initial guess, exact and reconstructed values for theboundary @X2, in the case of Examples 2 and 4, obtained usingthe least-squares method functional (18) subject to the physicalconstraints (21), perturbed displacements (Dirichlet data) andexact tractions (Neumann data) on @X1 and exact displacementson @X2, i.e. K = I in Eq. (6d), are illustrated in Figs. 3(a) and (b),respectively. As can be observed from these figures, the MFSapproximations are not only poor, but also highly oscillatoryand, in some cases unbounded, i.e. unstable. At the same time,Figs. 3(a) and (b) clearly show the necessity of employing regu-larization methods to obtain accurate and stable solutions to theinverse geometric problems investigated. Similar results havebeen obtained for the inverse geometric problems associatedwith the other examples analyzed in this paper and, therefore,they are not illustrated.
5.3. Accuracy error
In order to analyze the accuracy of the numerical results ob-tained for the unknown boundary, @X2, of the two-dimensionaldomain, X, occupied by an isotropic linear elastic solid, using var-
.0 0.5 1.0x1
ExactGuesspu = 1%pu = 3%pu = 5%
.0 0.5 1.0x1
ExactGuesspt = 1%pt = 3%pt = 5%
the Tikhonov regularization method, K = I, and noisy (a) displacements, ~u�j@X1, and

L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3337
ious values of the regularization parameter, k > 0, we define theroot mean-square (RMS) error by
ezðkÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
N2 � 1
XN1þN2
‘¼N1þ2
zð‘;kÞ2 � zð‘;anÞ2
� �2
vuut¼ 1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
N2 � 1p kzðkÞ � zðanÞk; k > 0; ð36Þ
where zðkÞ ¼ zðN1þ2;kÞ2 ; . . . ; zðN1þN2 ;kÞ
2
h iTis the numerically retrieved va-
lue corresponding to the regularization parameter, k > 0, for the ex-
act vector, zðanÞ ¼ ½zðN1þ2;anÞ2 ; . . . ; zðN1þN2 ; anÞ
2 �T, that determines theunknown boundary, @X2. Figs. 4(a) and (b) present on a log–logscale the RMS error, ez, defined by Eq. (36), as a function of the reg-ularization parameter, k, obtained using perturbed Dirichlet dataand exact Neumann data on the known boundary, @X1, K = I andthe MFS-based Tikhonov first-order regularization method de-scribed in Section 4, for the inverse geometric problems given byExamples 2 and 4, respectively.
-1.0 -0.5 0-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
-1.0 -0.5 0-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
Fig. 9. Initial guess, exact and reconstructed values for the boundary @X2, obtained usinand (b) K = 0, for Example 4.
5.4. Selection of the optimal regularization parameter
The performance of regularization methods depends cruciallyon the suitable choice of the regularization parameter. Severalheuristic approaches, which are preferable in the case when noa priori information about the noise is available, have been pro-posed for the Tikhonov regularization method, including the L-curve criterion, see Hansen (1998), and the generalized cross-validation, see Wahba (1977). Another extensively studied crite-rion is the discrepancy principle, see e.g. Morozov (1966).Although this criterion is mathematically rigorous, its main dis-advantage is represented by the fact that it requires a reliableestimation of the amount of noise added into the data whichmay not be available in practical problems. In this paper, weemploy Morozov’s discrepancy principle to determine the opti-mal regularization parameter, kopt, for the proposed numericalmethod.
For every value of the regularization parameter, we define thefollowing error
EgðkÞ ¼ kFðgðkÞÞ � yk ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2F LSðgðkÞÞ
q; k > 0; ð37Þ
.0 0.5 1.0
x1
ExactGuesspu = 1%pu = 3%pu = 5%
.0 0.5 1.0
x1
ExactGuesspt = 1%pt = 3%pt = 5%
g the Tikhonov regularization method, perturbed Cauchy data on @X1, and (a) K = I,

3338 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
where g(k) = (c(k), z(k)) is the numerical solution to the constrainedminimization problem (22) corresponding to the regularizationparameter, k, FðgÞ ¼ ½F1ðgÞ; . . . ; FN1þN2 ðgÞ�
T and y ¼ ½�y1; . . . ; �yN1þN2 �T.
On using the convergence error defined in Eq. (37), the selectionof the optimal value, kopt, for the regularization parameter, k,according to Morozov’s discrepancy principle reads:
kopt ¼ maxk>0
EgðkÞ � kFðgðk;�ÞÞ � yek 6 �� �
; ð38Þ
where g(k;�) = (c(k;�), z(k;�)) is the numerical solution to the con-strained minimization problem (22) corresponding to the regulari-zation parameter, k, and noisy data, ye, whilst � is a measure of theperturbations in the boundary data, see Morozov (1966), i.e.
ky � yek 6 �: ð39Þ
Figs. 5(a) and (b) illustrate the evolution of the convergence error,Eg, as a function of the regularization parameter, k, obtained withnoisy displacements and exact tractions on the known boundary,@X1, K = I and the Tikhonov regularization method, in the case ofExamples 2 and 4, respectively. The corresponding values for theoptimal regularization parameter, kopt, obtained according to thediscrepancy principle, are as follows:
(i) kopt = 10�5 for pu = 1%, 3% and kopt = 10�4 for pu = 5%, in thecase of Example 2;
-1.0 -0.8 -0.6 -0.4 -0.2 0-1.0
-0.8
-0.6
-0.4
-0.2
0.0
x2
ExactGuesspu = 1%pu = 3%pu = 5%
-1.0 -0.8 -0.6 -0.4 -0.2 0
x
-0.8
-0.6
-0.4
-0.2
0.0
x2
ExactGuesspt = 1%pt = 3%pt = 5%
Fig. 10. Initial guess, exact and reconstructed values for the boundary @X2, obtained usinand (b) K = 0, for Example 5.
(ii) kopt = 10�5 for pu = 1% and kopt = 10�4 for pu = 3%, 5%, in thecase of Example 4.
By comparing Figs. 4 and 5, it can be seen that, for both Exam-ples 2 and 4, and all levels of noise added into the Dirichlet data on@X1, the minimum in the RMS accuracy error, ez, is attained fork � kopt, with kopt given by the discrepancy principle (38). Similarresults have been obtained for the other inverse problems investi-gated in this study and hence they are not presented here. There-fore, we can conclude that Morozov’s discrepancy principle isapplicable and provides very good approximations for the optimalregularization parameter.
5.5. Numerical results obtained with regularization
Figs. 6(a) and (b) show the initial guess, the exact and numericalvalues for the unknown boundary, @X2, obtained using the regular-ized MFS algorithm described in Section 4, the optimal regulariza-tion parameter, k = kopt, chosen according to the discrepancyprinciple (38), K = I, and various levels of noise added into the dis-placement uj@X1
and traction tj@X1vectors, respectively, in the case
of the inverse geometric problem (6a)–(6d) for Example 1. Fromthese figures, it can be observed that for Example 1 the numericalsolutions are stable and consistent with respect to the amounts of
.0 0.2 0.4 0.6 0.8 1.0
x1
.0 0.2 0.4 0.6 0.8 1.0
1
g the Tikhonov regularization method, perturbed Cauchy data on @X1, and (a) K = I,

L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340 3339
noise pu and pt added into the input Dirichlet and Neumann dataon the accessible boundary, respectively. Moreover, for both in-verse problems associated with Example 1, the numerically re-trieved solutions converge to their corresponding exact solutiongiven by Eq. (28b).
The MFS-based Tikhonov first-order regularization method pre-sented in Section 4, in conjunction with Morozov’s discrepancyprinciple for determining the optimal value of the regularizationparameter, produces stable and consistent numerical solutionswith respect to the amount of noise added into the displacementson @X1 or tractions on the known part of the boundary, @X1, whichare at the same time accurate approximations for and convergenttowards their corresponding exact value, also in the case of two-dimensional non-convex domains with a smooth boundary, suchas the peanut-shaped domain occupied by an isotropic linearelastic solid and considered in Example 2, see Eq. (29a). These re-sults can be observed from Figs. 7(a) and (b) which illustrate theinitial guess, the exact and numerically retrieved values for the un-known boundary given by Eq. (29b), for perturbed Dirichlet data on@X1 and K = I, and exact Neumann data on @X1 and K = 0,respectively.
The proposed MFS–Tikhonov regularization procedure worksequally well also for the inverse geometric problem (6a)–(6d) intwo-dimensional domains occupied by an isotropic linear elasticmaterials and bounded by a piecewise smooth boundary, such asthe rotated square, the hexagonal domain and the rotated rectan-gle considered in Examples 3–5, respectively, with perturbed Cau-chy data on the accessible part of the boundary, @X1, i.e. pu > 0 and/or pt > 0, and either exact displacements (K = I) or tractions (K = 0)given on the unknown and inaccessible boundary, @X2. The initialguess, the exact and numerical values for the unknown boundary,@X2, in the case of Examples 3–5, obtained using the regularizationmethod presented in Section 4, the optimal regularization param-eter, k = kopt, selected by the discrepancy principle, and various lev-els of noise added into the Cauchy data, are shown in Figs. 8–10,respectively. However, it can be noted from these figures that, inExamples 3–5, the corner points are, as expected, slightlyrounded-off since the minimization of the Tikhonov first-order reg-ularization functional (17) subject to the physical constraints (21)imposes the numerical solution to be smooth.
6. Conclusions
The MFS was applied for solving accurately and stably an in-verse problem associated with two-dimensional isotropic linearelastic materials, namely the detection of an unknown portion ofthe boundary from a given exact boundary condition on this partof the boundary and additional noisy boundary displacementsand tractions (i.e. Cauchy data) on the remaining known portionof the boundary. This inverse geometric problem is ill-posed andrecasts, in discrete form, as an ill-conditioned system of nonlinearalgebraic equations, which was solved in a stable manner by usingthe Tikhonov first-order regularization method. The optimal valueof the regularization parameter was chosen according to Morozov’sdiscrepancy principle. Various examples for two-dimensional sim-ply connected, convex and non-convex domains occupied by anisotropic linear elastic medium and having smooth and piecewisesmooth boundaries, were considered. From the numerical resultspresented in this paper it can be concluded that the proposedmethod is consistent and stable with respect to decreasing theamount of noise added into the Cauchy data, accurate and compu-tationally very efficient. The present method can be extended toother two-dimensional inverse geometric problems associatedwith partial differential operators whose fundamental solutionsare available, such as Helmholtz-type equations and anisotropic
heat conduction, as well as similar three-dimensional inverse geo-metric problems, but these are deferred as future work.
Acknowledgement
The financial support received from the Romanian Ministry ofEducation, Research and Innovation through IDEI Programme,Exploratory Research Projects, Grant PN II–ID–PCE–1248/2008, isgratefully acknowledged.
References
Aliabadi, M.H., 2002. The boundary element method. Applications in Solids andStructures, vol. 2. John Wiley & Sons, London.
Aparicio, N.D., Pidcock, M.K., 1996. The boundary inverse problem for the Laplaceequation in two dimensions. Inverse Problems 12, 565–577.
Beretta, E., Vessela, S., 1998. Stable determination of boundaries from Cauchy data.SIAM Journal of Mathematical Analysis 30, 220–232.
Bonnet, M., Constantinescu, A., 2005. Inverse problems in elasticity. InverseProblems 21, R1–R50.
Bukhgeim, A.L., Cheng, J., Yamamoto, M., 1999. Stability for an inverse problem ofdetermining a part of the boundary. Inverse Problems 15, 1021–1032.
Chen, C.W., Young, D.L., Tsai, C.C., Murugesan, K., 2005. The method of fundamentalsolutions for inverse 2D Stokes problems. Computational Mechanics 37, 2–14.
Cho, H.A., Golberg, M.A., Muleshkov, A.S., Li, X., 2004. Trefftz methods for timedependent partial differential equations. CMC: Computers, Materials, andContinua 1, 1–37.
Dong, C.F., Sun, F.Y., Meng, B.Q., 2007. A method of fundamental solutions forinverse heat conduction problems in an anisotropic medium. EngineeringAnalysis with Boundary Elements 31, 75–82.
Fairweather, G., Karageorghis, A., 1998. The method of fundamental solutions forelliptic boundary value problems. Advances in Computational Mathematics 9,69–95.
Fairweather, G., Karageorghis, A., Martin, P.A., 2003. The method of fundamentalsolutions for scattering and radiation problems. Engineering Analysis withBoundary Elements 27, 759–769.
Fam, G.S.A., Rashed, Y.F., 2009. The method of fundamental solutions applied to 3Delasticity problems using a continuous collocation scheme. EngineeringAnalysis with Boundary Elements 33, 330–341.
Gill, P.E., Murray, W., Wright, M.H., 1981. Practical Optimization. Academic Press,London.
Golberg, M.A., Chen, C.S., 1999. The method of fundamental solutions for potential,Helmholtz and diffusion problems. In: Golberg, M.A. (Ed.), Boundary IntegralMethods: Numerical and Mathematical Aspects. WIT Press and ComputationalMechanics Publications, Boston, pp. 105–176.
Hadamard, J., 1923. Lectures on Cauchy Problem in Linear Partial DifferentialEquations. Yale University Press, New Haven.
Hansen, P.C., 1998. Rank-Deficient and Discrete Ill-Posed Problems: NumericalAspects of Linear Inversion. SIAM, Philadelphia.
Hon, Y.C., Li, M., 2008. A computational method for inverse free boundarydetermination problem. International Journal for Numerical Methods inEngineering 73, 1291–1309.
Hon, Y.C., Wei, T., 2004. A fundamental solution method for inverse heat conductionproblems. Engineering Analysis with Boundary Elements 28, 489–495.
Hon, Y.C., Wei, T., 2005. The method of fundamental solutions for solvingmultidimensional heat conduction problems. CMES: Computer Modeling inEngineering & Sciences 13, 219–228.
Hon, Y.C., Wu, Z., 2000. A numerical computation for inverse boundarydetermination problem. Engineering Analysis with Boundary Elements 24,599–606.
Hsieh, C.K., Kassab, A.J., 1986. A general method for the solution of inverse heatconduction problem with partially unknown system geometries. InternationalJournal of Heat and Mass Transfer 29, 47–58.
Huang, C.C., Chao, B.H., 1997. An inverse geometry problem for identifying irregularboundary configurations. International Journal of Heat and Mass Transfer 40,2045–2053.
Huang, C.C., Tsai, C.C., 1997. A transient inverse two-dimensional geometry problemin estimating time-dependent irregular boundary configurations. InternationalJournal of Heat and Mass Transfer 41, 1707–1718.
Jin, B., Marin, L., 2007. The method of fundamental solutions for inverse sourceproblems associated with the steady-state heat conduction. InternationalJournal for Numerical Methods in Engineering 69, 1570–1589.
Jin, B., Zheng, Y., 2006. A meshless method for some inverse problems associatedwith the Helmholtz equation. Computer Methods in Applied Mechanics andEngineering 195, 2270–2280.
Knops, R.J., Payne, L.E., 1971. Uniqueness Theorems in Linear Elasticity. Springer-Verlag, Berlin.
Landau, L.D., Lifshitz, E.M., 1986. Theory of Elasticity. Course of Theoretical Physics,vol. 7. Butterworth-Heinemann, Oxford.
Lesnic, D., Berger, J.R., Martin, P.A., 2002. A boundary element regularizationmethod for the boundary determination in potential corrosion damage. InverseProblems in Engineering 10, 163–182.

3340 L. Marin / International Journal of Solids and Structures 47 (2010) 3326–3340
Marin, L., 2005a. A meshless method for solving the Cauchy problem in three-dimensional elastostatics. Computers & Mathematics with Applications 50, 73–92.
Marin, L., 2005b. Numerical solutions of the Cauchy problem for steady-state heattransfer in two-dimensional functionally graded materials. InternationalJournal of Solids and Structures 42, 4338–4351.
Marin, L., 2005c. A meshless method for the numerical solution of the Cauchyproblem associated with three-dimensional Helmholtz-type equations. AppliedMathematics and Computation 165, 355–374.
Marin, L., 2006. Numerical boundary identification for Helmholtz-type equations.Computational Mechanics 39, 25–40.
Marin, L., 2008. The method of fundamental solutions for inverse problemsassociated with the steady-state heat conduction in the presence of sources.CMES: Computer Modeling in Engineering & Sciences 30, 99–122.
Marin, L., 2009. Boundary reconstruction in two-dimensional functionally gradedmaterials using a regularized MFS. CMES: Computer Modeling in Engineering &Sciences 46, 221–253.
Marin, L., Lesnic, D., 2003. BEM first-order regularisation method in linear elasticityfor boundary identification. Computer Methods in Applied Mechanics andEngineering 192, 2059–2071.
Marin, L., Lesnic, D., 2004. The method of fundamental solutions for the Cauchyproblem in two-dimensional linear elasticity. International Journal of Solids andStructures 41, 3425–3438.
Marin, L., Lesnic, D., 2005a. The method of fundamental solutions for the Cauchyproblem associated with two-dimensional Helmholtz-type equations.Computers & Structures 83, 267–278.
Marin, L., Lesnic, D., 2005b. The method of fundamental solutions for inverseboundary value problems associated with the two dimensional biharmonicequation. Mathematical and Computers in Modelling 42, 261–278.
Marin, L., Karageorghis, A., Lesnic, D., submitted for publication. The MFS forboundary identification in two-dimensional harmonic problems.
Mathon, R., Johnston, R.L., 1977. The approximate solution of elliptic boundaryvalue problems by fundamental solutions. SIAM Journal on Numerical Analysis14, 638–650.
Mera, N.S., 2005. The method of fundamental solutions for the backward heatconduction problem. Inverse Problems in Science and Engineering 13, 79–98.
Mera, N.S., Lesnic, D., 2005. A three-dimensional boundary determination problemin potential corrosion damage. Computational Mechanics 36, 129–138.
Mitic, P., Rashed, Y.F., 2004. Convergence and stability of the method of meshlessfundamental solutions using an array of randomly distributed source.Engineering Analysis with Boundary Elements 28, 143–153.
Morozov, V.A., 1966. On the solution of functional equations by the method ofregularization. Doklady Mathematics 7, 414–417.
Numerical Algorithms Group Library Mark 21, 2007. NAG(UK) Ltd, WilkinsonHouse, Jordan Hill Road, Oxford, UK.
Nili Ahmadabadi, M., Arab, M., Maalek Ghaini, F.M., 2009. The method offundamental solutions for the inverse space-dependent heat source problem.Engineering Analysis with Boundary Elements 33, 1231–1235.
Park, H.M., Ku, J.H., 2001. Shape identification for natural convection problems.Communications in Numerical Methods in Engineering 17, 871–880.
Peneau, S., Jarny, Y., Sarda, A., 1966. Isotherm shape identification for a two-dimensional heat conduction problem. In: Bui, H.D., Tanaka, M., Bonnet, M.,Maigre, H., Luzzato, E., Reynier, M. (Eds.), Inverse Problems in EngineeringMechanics. Balkema, Rotterdam, pp. 47–53.
Shigeta, T., Young, D.L., 2009. Method of fundamental solutions with optimalregularization techniques for the Cauchy problem of the Laplace equation withsingular points. Journal of Computational Physics 228, 1903–1915.
Tankelevich, R., Fairweather, G., Karageorghis, A., Smyrlis, Y.-S., 2006. Potential fieldbased geometric modeling using the method of fundamental solutions.International Journal for Numerical Methods in Engineering 68, 1257–1280.
Tikhonov, A.N., Arsenin, V.Y., 1986. Methods for Solving Ill-Posed Problems. Nauka,Moscow.
Wahba, G., 1977. Practical approximate solutions to linear operator equations whenthe data are noisy. SIAM Journal on Numerical Analysis 14, 651–667.
Yan, L., Fu, C.-L., Yang, F.-L., 2008. The method of fundamental solutions for theinverse heat source problem. Engineering Analysis with Boundary Elements 32,216–222.
Zeb, A., Ingham, D.B., Lesnic, D., 2008. The method of fundamental solutions for abiharmonic boundary determination. Computational Mechanics 42,371–379.