Recursive Robot Dynamics - Prof. Subir Kumar Saha | Ph. D...
73
Recursive Robot Dynamics Lecture 1 Prof. S.K. Saha ME Dept., IIT Delhi
Transcript of Recursive Robot Dynamics - Prof. Subir Kumar Saha | Ph. D...

Recursive Robot Dynamics
Lecture 1
Prof. S.K. Saha ME Dept., IIT Delhi

What is recursive?
1
#n
#1
#i
i
n
#1: vel., accn.
1: rate, accn
+ #0
#i: vel., accn.
#n: vel., accn.
#n: inertia force
n: torque
i: torque
#i inertia force
#1:inertia force
#0: vel., accn. = 0
1: torque

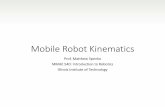
Why recursive?
• Efficient, i.e., less computations and CPU time
Compute jt. torque Compute jt. accn. (Inverse) (Forward)
0 5 10 15 20 25 30
0
2000
4000
6000
8000
10000
12000
14000
Total number of joints
Co
mp
uta
tio
na
l C
ou
nts
Equal number of 1-, 2- and 3-DOF joints
Proposed
Balafoutis
Featherstone
Angeles
0 5 10 15 20 25 30
0
0.5
1
1.5
2
2.5x 10
4
Total number of joints
Co
mp
uta
tio
na
l C
ou
nts
1-, 2- and 3-DOF joints
Proposed
Mohan and Saha
Lilly and Orin
Fetherstone
Ref. : Shah, S.,V. Saha, S.K., Dutt, J.K, Dynamics of Tree-type Robotic Systems, Springer, 2013

Why recursive? (contd.)
• Numerically stable Simulation is realistic Recursive Non-recursive (Forward) (Forward)
Ref. : Mohan, A., and Saha, S.K., A recursive, numerically stable, and efficient simulation algorithm for serial robots with flexible links, Multibody System Dyn., V. 21, N. 1,pp. 1—35.

Unrealistic: Constraint Violation
#0
#1
1
#2
#3
2
3 θ3
θ1 θ2

Review of Dynamic Formulations
• Euler-Lagrange (EL)
• Newton-Euler (NE) i i i
i i i i i i
m
v f
I ω ω I ω n
i
i i
d L L
dt q q
i i i i i i M t WM t w
, ,i i ii
i i i i
i i im
I O ω nω 1 ΟM W t ,w
O 1 v fΟ Ο
Starting point for the Recursive Dynamics (using the DeNOC matrices)

DeNOC matrices
Newton-Euler to Euler-Lagrange
• Analytical expressions of vector and matrices,
Decomposition of inertia Matrix, Recursive algorithms,
Dynamics model simplifications, etc.
,
Decoupled form of the velocity transformation matrix
Minimal order Equations of motion
(Euler-Lagrange)
Newton-Euler Equations of
motion ×
Eliminate constraint forces and moments from the NE equations.
Rate of Independent coordinate θ.
Link velocities t (ω and v) = ×
DeN
OC
m
atri
ces
=

Example: A Moving Mass
: Vertical component Reaction
: Horizontal component Motion
Mass, m
Force,
f
fvf
vf
f
x

Equation of Motion
Newton’s 2nd law: Velocity constraint: NOC: Euler-Lagrange:
cff mce
x ][ic
][i
ef
[ ] [ ( ) ] [ ]T Tv cf f f mx f mx i i j i i
External force,
Mass, m
i
j
c
cfReaction,
Note that
[ ] ( )[ ] 0Tv cf f i j

Uncoupled NE Equations
• Newton-Euler (NE) equations for the ith rigid body
• NE equations in compact form
where
i
i i i i i i
i im
I ω ω I ω n
v f
i i i i i i M t WM t w
, , ,i i ii
i i i i
i i im
I O ω nω 1 ΟM t W w
O 1 v fΟ Ο

Uncoupled NE Equations
#0
1
#n
#1
#i
i
n
E C
i i i i i i i M t WM t w w
E C Mt WMt w w
1 2
1 2
diag [ ]
diag [ ]
n
n
M M M M
W W W W
• Separate the bodies n bodies
• 6n NE equations

Kinematic (Velocity) Constraints
Bij: the 6n 6n twist-propagation matrix
pi: the 6n-dimensional joint-rate propagation vector or twist generator
( )
ij
ij j i
c
1 O
B r d 1 1i
i
i i
ep
e d

DeNOC Matrices
• NNlNd: the 6n n Decoupled Natural Orthogonal Complement

Coupled Equations of Motion
• Pre-multiplication by NT
• Equations in compact form
I : nn Generalized inertia matrix (GIM)
C : nn Matrix of convective inertia (MCI) terms
: n-dimensional vector of generalized forces due to driving torques/forces, and those resulting from the gravity, environment and dissipation.
Iθ Cθ τ
τ
)()( CETTwwNWMttMN
n coupled EL equations
- no partial differentiation T C N w 0

Generalized Inertia Matrix (GIM)
• Generalized inertia matrix (GIM)
where
• Each element of the GIM
• Mass matrix of composite body
15
T
ij i i ij ji p M B p
1, 1 1,
T
i i i i i i i M M B M B
Td dI N MN
l
T
l MNNM ~

Vector of Convective Inertia (VCI)
• Vector of Convective Inertia
where and
• Each element of h
'
1, 1
where , and
and
T
i i i
T
i i i i i n n
i i i i i i
h p w
w w B w w w
w M t W M t
'~wNθChT
d
)('~ WMtMt'Nw T
d θWNNt' )( ll

Generalized Force (Joint Torque)
• Generalized Force
where
• Each element is obtained recursively
1, 1
,
where , and
T E
i i i
E E T E E E
i i i i i n n
p w
w w B w w w
T Edτ N w
ET
l
EwNw ~

Example: One-link arm
11
2
( )
1
3
T
T T
I i
m ma
p Mp
e Ie (e d) (e d)
where and m
e I Op M M
e d O 1
;
TT asac ]02
1
2
1[][ ;]100[][ 11 de
20 0 0
[ ] 0 1 012
0 0 1
ma
2
I
2
22
0
[ ] [ ] 012
0 0 1
s s c
maT s c c1 2
I Q I Q
100
0
0
cs
sc
Q
Ref: “Introduction to Robotics” by Saha
Moment of inertia about O

where
( )
[ )] 0
T
T
h
p MW WM p
e I(e e) (e Ie
f
ndeewN ])([1
TTET
l
TT mg ]00[][;]00[][ 11 fn
mgas2
11
Equation of motion: 21 1
3 2ma mgas

1
#n
#1
#i
i
n
#0
1 1 1
2 2 2 1
1n n n n
α p
α p α
α p α
1 1 1 1 1 1
2 2 2 2 2 2
21 1 21 1
, 1 1 , 1 1
n n n n n n
n n n n n n
β p Ω p
β p Ω p
B β B α
β p Ω p
B β B α
Recursive Inverse Dynamics
1 1 1 1 1 1 , 1
1 1 1 1 1 1 21 2
n n n n n n
T
n n n n n n n n n
T
γ M β W M α
γ M β W M α B γ
γ M β W M α B γ
1 1 1
1 1 1
T
n n n
T
n n n
T
p γ
p γ
p γ

Recursive Robot Dynamics
Lecture 2
Prof. S.K. Saha ME Dept., IIT Delhi

Summary of Previous Lecture
• Why recursive?
• Define DeNOC (Decoupled Natural Orthogonal Complement) matrices from velocity constraints
• Derived NE EL equations (Constrained minimum set)
• Analytical expressions for the GIM, and other matrices

Equation of motion (Dynamic Model)
21 1
3 2ma mgas
One-link Arm

Chinese (PRC)
Spanish (Mexico)
RoboAnalyzer (Free: www.roboanalyzer.com)

where
( ) [ )] 0T Th p MW WM p e I(e e) (e Ie
f
ndeewN ])([1
TTET
l
TT mg ]00[][;]00[][ 11 fn
mgas2
11
Equation of motion: 21 1
3 2ma mgas
2
11
1( )
3
T T TI i m ma p Mp e Ie (e d) (e d)
Verify the results using MATLAB’s symbolic tool (MuPAD)

Example: Two-link Manipulator ;
11 12 21 1 1
21 22 2 2
( ); ;
i i i h
i i h
I h Cθ τ
22 :ScalarTi 2 2 22 2p M B p
2222222222222 ][][][][][ ddeIeTT mi
22 : 6 6 identity matrix
1 OB
O 1
2
2
2 2
: 6-dim. vector
ep
e d
2
2 2
2
: 6 6 sym. matrixm
I OM M
O 1
X3
Y3

2 2 2 2 2 2 2 21 1
[ ] [0 0 1] ; [ ] [ 0]2 2
T Ta c a s e d
2 2
2 2 2
0
0
0 0 1
c s
s c
Q
22 2 2
22
2 2 2 2 2 2 2
0
[ ] [ ] 02 3 120 0 1
T
s s c
mas c c
I Q I Q
2222222222222 ][][][][][ ddeIeTT mi
2 2 222 2 2 2 2 2 2
1 1 1
12 4 3i m a m a m a
X3
Y3

;
21 12 1 1( ) :ScalarTi i 2 2 2p M B p
21 2 1 2 1 1 1 2 2 1 1 1 1 2 1[ ] [ ] [ ] [ ] ([ ] [ ] )T Ti m e I e d d r d
211 2
: 6 6 matrix( )
1 OB
r d 1 1
2 1 2 1 1 2 2 2 12 2 12
1 1 1 1 1 1 1 1 2 1
1 1[ ] 0 0 1 ; [ ] [ ] [ 0]
2 2
1 1[ ] [0 0 1] ; [ ] [ ] [ 0]
2 2
T T
T T
a c a s
a c a s
e d Q d
e d r
r1 1 1
1 1 1
0
0
0 0 1
c s
s c
Q
2 2 221 2 2 2 1 2 2 2 2 2 2 2 1 2 2
1 1 1 1 1
12 2 4 3 2i m a m a a c m a m a m a a c
1
1
1 1
: 6-dim. vector
ep
e d

11 1 1 11 1 :ScalarTi p M B p
11 : 6 6 identity matrix
1 OB
O 1
1
1
1
: 6 6 sym. matrixm
I OM
O 1
X3
Y3
11δ
1δIBMBMM 2
11
11212111 ~
~~~
m
T
12 21
1 1 2 2 1 2 1
( )
( )m
c c
I I I r d δ 1
2121
~cδ m
211~ mmm
11 1 1 1 1 1 1 1 1 1 1
2 2 21 1 2 2 2 1 2 1 2 2
[ ] [ ] [ ] [ ] [ ]
1 ( )
3
T Ti m
m a m a m a m a a c
e I e d d

Vector of Convective Inertia
Link Joint ai
(m)
bi
(m)
i
(rad)
i
(rad)
1 r 0.3 0 0 JV [0]
2 r 0.25 0 0 JV [0]
22 2 2 2 1 2 2 1
1
2
Th m a a sθ θ p w 1 1 2 1 2 2 2 2 11
( )2
Th m a a sθ θ θ θ 1 p w
Link mi ri,x ri,y ri,z Ii,xx Ii,xy Ii,xz Ii,yy Ii,yz Ii,zz
(kg) (m) (kg-m2)
1 0.5 0.15 0 0 0 0 0 0.00375 0 0.00375
2 0.4 0.125 0 0 0 0 0 0.00208 0 0.00208
DH
an
d I
nert
ia p
ara
me
ters
Inverse Dynamics Results

Joint Torques
No gravity (horizontal)
With gravity (vertical

Equation of motion for one-link arm
21 1
3 2ma mgas
Forward Dynamics & Simulation
2
3 1( )
2mgas
ma Forward Dynamics:
Integration (numerical): 1 2
1 2
2 12
;
3 1( sin )
2
y y
y y
y mga yma
1st order form:
( , )ty f y
Integrate (say, numerically) to obtain y(t) using, e.g., Runge-Kutta method (ode45 of MATLAB)
Simulation

Recursive Forward Dynamics
θ
34
Step 2: UDUT Decomposition
, where andT T
Analytically
UDU θ I UDU τ Cθ
Equation of the motion
The joint accelerations are then solved as
1 1θ U D U
T
Hence forward dynamics requires three steps
Step 1: Computation of φ
Step 3: Recursive computation of
Iθ Cθ τ

Observations
• Derivations appear to be complex for the simpler manipulators
• It was for demonstration only
• The computations will be done algorithmically
• Due to recursive natures, calculations are fast
• The algorithm should be used for complex robotic systems like 6- or more-DOF robots

Recursive Robot Dynamics
Lecture 3
Prof. S.K. Saha ME Dept., IIT Delhi

Summary of Previous Lecture
• Use of RoboAnalyzer (RA) for inverse dynamics of one-link arm
• GIM for 2-link manipulator
• Inverse dynamics of KUKA robot
• Forward dynamics and simulation
• Use of RA for simulation
• Some observations for using recursive dynamics

Stew
art
Pla
tfo
rm
Parallel Manipulators

Four-bar Mechanism • Separate all links • Draw Free-body diagrams (FBD)
12 12
1 1 1 1 01 1 01 1 21 1 21
1 1 01 21 1 1 01 21;
x y
x y y x x y y x
x x x y y y
f f
I d f d f r f r f
m c f f m c f f
=
Equations of motion: 3 per link
Base, #0
#1
#3
C1
#2
f12
f21
f01
f32
f23
f03
d1
r1
#1
#2
a3
2
3
1
3 2
1 4
a2
a0
a1
Base, #0
#3
4
1
9 equations 13 – 4 (3rd law) = 9 unknowns

11 1 1 1 1 1
01 1 1
01 1 1
122 2 2 2 2 2
12 2 2
23 2 2
233 3 3 3 3
03
03
1
1 1 0 '
1 1
1 1
1 1
0 ' 1 1
1 1
y x y x
x x
y x
xy x y x
x x
x y
yy x y x
x
y
d d r r I
fs m c
f m c
fd d r r I
f m c
f m c
fd d r r I
fs
f
3
3 3
3 3
: 9 9 matrix x : 9 1 : 9 1
x
y
m c
m c
A b
• Ghosh and Mallik, Theory of Machines and Mechanisms
1 (Forward); (Backward)y
x=A b LUx=b; Ly=b Ux=y
Disadv.: Need to calculate even the reactions for inv. dyn.

Three-link Serial with f03 as External • Join first three links form
Equations of motion
Base, #0
#1
#3
C1
#2
f12
f21
f01
f32
f23
f03
d1
r1
Base, #0
033 3
( ) ( )
: 3 eqs.T
T T T T E Cd l d l
E C
J f
N N Mt WMt N N w w
I θ Cθ τ τ0 1 2 3
2 3
0
a a a a 0 J θ 0
#1
#2
a3
2
3
1
3 2
1
a2
a1
#3 1
f03 a0

• The DeNOC matrices for 3-link serial manipulator
Proof of C = JTf03
1 1 1
2 21 2 2
3 31 32 3 3
18 1 :18 18 :18 3 3 1
0' 0 '
0 '
l d
s s
s
N N
t 1 p
t B 1 p
t B B 1 p
32 21 31 21 32 31
2
1 21 2 32 3
21 31 1
32 2 2 32 3
3
3
( )
0 '
T T T
C
C T C T C
T T C
T C T C C T Cl
C
C
s
B B B B B B
w
w B w B w
1 B B w
N w 1 B w w B w
1 w
w
03 23 3 23 3 03
3
03 23
C
n n d f r fw
f f2 3
32
6 6
( )
0 '
T
s
1 r d 1B
1
f03
f23
r3
d3 n03
n23
C3

23
23
32 12 2 12 2 32
2 2 32 3
32 126 1
03 23 3 23 3 03 2 3 03 23
03 23
( ) ( )
C C T C
n
f
n n d f r f
w w B wf f
n n d f r f r d f f +
f f
2
03 12 2 3 3 03 2 12
2
03 12
( )C
p
n n r d r f d f
w
f f
03 01 1 03 1 01
1
03 01
C
n n p f d fw
f f
C2
r3 2
3
1
3 2
1
r2
1
f03
p2
p1
d3

Constraint Torque 1 1
2 2
3 3
0 '
0 '
T C
T C T Cd
T C
s
s
p w
N w p w
p w
( 1,2,3)i
ii i
i
ep
e d
03 01 1 03 1 01
1 1 1 1 1 1
03 01
1 03 01 1 03 1 01
1 1 03 01
1 1 03 1 1 03
( )
( )
( ) ( )
( ) ( )
C T C T T
Scalar
T
T
T T
n n p f d fp w e e d
f f
= e n n p f d f
e d f f
= e ρ f e ρ f
2 2 2 2 2 03 2 2 03
3 3 3 3 3 03 2 3 03
( ) ( )
( ) ( )
C T C T T
C T C T T
p w e ρ f e ρ f
p w e a f e a f
C2
a3 2
3
1
3 2
1
r2
1
f03
p1
1
d2

Equations of Motion
*1 03[ ,0,0]:
T T
E C
known
J fτ
Iθ Cθ τ τ
3
1 1 2 2 3 3
a
J e ρ e ρ e ρ
*1 1 1 2 12 3 123 1 1 2 12 3 123 1*2 2 12 3 123 2 12 3 123 03
*3 123 3 123 033
:3 3 :3 1:3 1
1
0
0
x
y
a s a s a s a c a c a c
a s a s a c a c f
a s a c f
A xb
Adv.: Reduced size of 33 (instead of 99) for inverse dynamics

Subsystem Recursive Method • Cut-open in a suitable location • Make serial systems • Apply serial-chain methods
( )I I I I I C I I θ C θ τ τ
( )II II II II II C II I θ C θ τ τ
Subsystem equations
: 2 eqs., 2 (x, y)? [2R: done]
: 1 eq., 3 (, x, y)? [1R: done]
1 0 2 3 a a a a
#1 #3
4
3
1
1
Base, #0
#2
#1
#2
a3
2
3
1
3 2
1 4
a2
a0
a1
Base, #0
#3
4
1
4
f12 (-)
f21 ()
123
2-3

I I II II J J θ
3 123 2 12 2 121 1
2 1 2 2 3 123 2 12 2 121 1
;
I I I II II IIen ln d en ln d
I II a s a s a sa s
a c a c a ca c
A N N A N N
J J
1 2 3 a a a
[0,0] ( )
( )T
II T
II II II II II C II
J λ
I θ C θ τ τ
1( )
( )T
I I I I I C II C
J λ
Subsystem II:
Subsystem I:
System + Motion
Solve
System + Motion Driving torque, 1
Adv.: Subsystem recursion.; Maximum size: 22 (not 99 or 33); Can use existing serial-chain dyn. algo.
123
3
1
1
2
;
II
I II
II
θ

Sub-system
(link) Mass (Kg)
Length (m)
I(#1) 1.5
0.038
II(#2) 5
0.2304
II(#3) 3
0.1152
0 0.5 1 1.50
50
100
150
200
250
300
350
400
Time (s)
Jo
int
an
gle
s (
de
g)
0 0.5 1 1.5-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Time (s)
Dri
vin
g t
orq
ue
(N
m)
3
1
2
Free: http://www.redysim.co.nr/download

Recursive Robot Dynamics
Lecture 4
Prof. S.K. Saha ME Dept., IIT Delhi
International 2013
Int.: 2009 Indian: 2013

Summary of Previous Lecture
• Dynamics (classical way) of 4-bar mechanism using FBD
• Cut-open 3+0 constrained dynamics of 4-bar
• Cut-open 2+1 constrained dynamics of 4-bar
• Inverse dynamics using ReDySim

Forward Dynamics of 4-bar Mechanism
[0,0] ( )
( )T
II T
II II II II II C II
J λ
I θ C θ τ τ
11 ( )
( )T
I I I I I C II C
J λ
Constrained equations of motion:
1
:5 1:5 5 :5 1
)
0 ) -
I I T I I I
II II T II II II
I II I I II II
I C
xA b
O (J
I -(J θ C θ
J -J O λ -J J θ
0II II
II
J -J
0θVelocity constraints:
1x=A b
+ (jt. accn.) jt.
vel. & pos.
DAE [Diff. Algeb. Eqn.) formulation: System appr.]

System-level Lagrange Multiplier Method
[0,0] ( )
( )T
II T
II II II II II C II
J λ
I θ C θ τ τ
Constrained equations of motion:
1
2
T
I J θ
J O λ
2
II II I I II II
II
J
θ
J -J -J J θθ
jt. vel. & pos. (jt. accn.)
1:3 1:3 3 :3 2
( )
0 ( )
T
I I TI I I I
II II TII II II II
I C
θI J
O J-λ
I Jθ τ -C θ
11 ( )
( )T
I I I I I C II C
J λ
Velocity constraints:
1 1 1
1 2
:2 2
( ) )T
I
λ JI J (JI
1
1( )T θ I J λ
Adv.: Inversions of smaller (33 and 22) matrices

Five-bar 2-DOF Manipulator
Base, #0
#1
2
1
2
1
a2
a0
a1 1
Cut
here
#1
2
1
2
1
a2
a0
a1 1
-
Base, #0
( )I θ C θ τ τI I I I I I
( )I θ C θ τ τII II II II II II
Subsystem equations
: 2 eqs., 1 (2 )? [2R done]
: 2 eqs., 3 (1, x, y)? [2R done]
Symmetric; Need to combine: 4 eqs., 4 (1, 2, x, y)?
2 2

Subsystem Recursion for 5-bar
Base, #0
#1
2
1
2
1
a2
a0
a1 1
Cut
here
#1
2
1
2
1
a2
a0
a1 1
-
Base, #0
( )I θ C θ τ τI I I I I I
( )I θ C θ τ τII II II II II II
Subsystem equations
: 1 eq., 1 (2 )? [1R done]
: 3 eqs., 3 (1, x, y)? [3R done]
No need to combine: Solved
2 2

Inverse Dynamics (w/o Gravity) Link lengths: 1 m; Mass of links: 6 kg
1 11 1
2[ sin( )]
2
f ii
T tt
T T

Inverse Dynamics (w/Gravity)

Two-DOF Parallel Manipulator
#0 O5
O3
#3 #2
#1
O4
F2
C2
C1
r2
c12
d1
O2
#4
F3
C3
C4
r3
c43
d4
O1
Cut here
P
x2
l1 l2
θ1
ao
1 2 0 l l a 0
Kinematic constraints
Link bi
(m)
θi
(m)
ai
(m)
αi
(m)
1 0 1 0 /2
2 b2 [JV] 0 0 0
Sliding velocity (constant): 0.1 m/sec.
Link mi
(kg)
ri,x, ri,y
(m)
ri,z Ii,xx, Ii,yy
(kg-m2)
1,2 655 0 .625 399
Two RP serial manipulators; Combined: 4 eqs., 4 (f1, f2, x, y)?


Three-DOF RRR Parallel Robot
Subsystem I: 5 eqs., 5 (D1, 2x, 2y, 7x, 7y )? Subsystem II: 1 eq.. 1 (D2)? Subsystem III: 1 eq.. 1 (D3)?

Inverse Dynamics of 3-DOF RRR Robot

Driving Torques (w/o gravity)

Driving Torques (w/gravity)

#0
O1
O2
Subsystem I (3-DOF)
3 eqs.; 4 (x, y, x, f1)?
O1
O4
#3
#2
#1
O3
f λ
One particular limb
f1
fI
Moving platform
O2
#4
#5 O5
#3
#2
#1
O3
O4
O6 Cut joint
Dimensionless
links C3
C2
r3
c23
d2
C1
d23
d3 14
14
2I
T
1
T * g T λ
I I I I 2 I
TI 3
1I
*
0
( ) 0 +
1
f
e a
N w w = e a f
e
A A
f

FBD of VII Subsystem
-fIλ -fII
λ
-fIIIλ
-fIVλ -fV
λ
-fVIλ
pp1 pp2
pp3
pp4 pp5
pp6
VII VII VII
c c c+ × =•
I ω ω I ω n
VII VII
cm =•
c f
VII
λ
I
c
p1 p6
λ
VI
f
n p 1 p 1
f
=
VII
c λ λ
I VI= f f f
Subsystem VII (6-DOF) 6 eqs.; Zero?

Inverse Dynamics Algorithm ;
VII
VII
6c
1 61 p1 p6
6c 1 6
VI:6 61
:6 1
:6 1
Ii
i
i
i
f
f
J
τ
h
n xs p s p
s sf y
1τ J h
;
Ref: Sadana, M., 2009, Dynamic Analysis of 6-DOF Motion Platform, M. Tech Project Report, IIT Delhi

Trajectory and actuating force
Using GUI

More Robots using ReDySim
Planar biped
Waking leg (also used as carpet scrapping
mechanism)

Legged Robots
Spatial biped
Spatial quadruped

Flexible Rope using ReDySim
0
Ms
M1
Base
Mi Torsion
spring
Detail of the
module Mi

Conclusions • Purpose of Recursive Robot Dynamics
– Efficiency – Numerical stability
• DeNOC matrices for serial-chain • NE to EL derivations • Constrained equations of motion for serial-chain systems • Schemes for Inverse and Forward Dynamics (Simulation) • RoboAnalyzer software for robot dynamics • Parallel robot application • Four-bar mechanism from FBD • Cut-open system and subsystem recursion • ReDySim software • Five-bar, 3-DOF RRR, Stewart platform dynamics • Custom-made GUI for Stewart platform • Simulation of walking robots and rope using ReDySim

Acknowledgements
• Mr. Majid Koul
• Mr. Rajivlochana C.G.
• Dr. Suril V. Shah
• Mr. Mukesh Sadana
• Dr. Himanshu Chaudhary
• Students of IIT Delhi and other institutes who used the materials mentioned in the lectures and given feedbacks.