Quo Vadis Embedded OS? - Vector · RTOS for deep embedded systems ... And what about deep embedded...
18
V1.0 | 2016-11-25 Quo Vadis Embedded OS?
Transcript of Quo Vadis Embedded OS? - Vector · RTOS for deep embedded systems ... And what about deep embedded...

V1.0 | 2016-11-25
Quo Vadis Embedded OS?
2
Motivation Introduction
ECUs gain more and more functionality due to increasing computing power of automotive microcontrollers and new vehicle features.
3
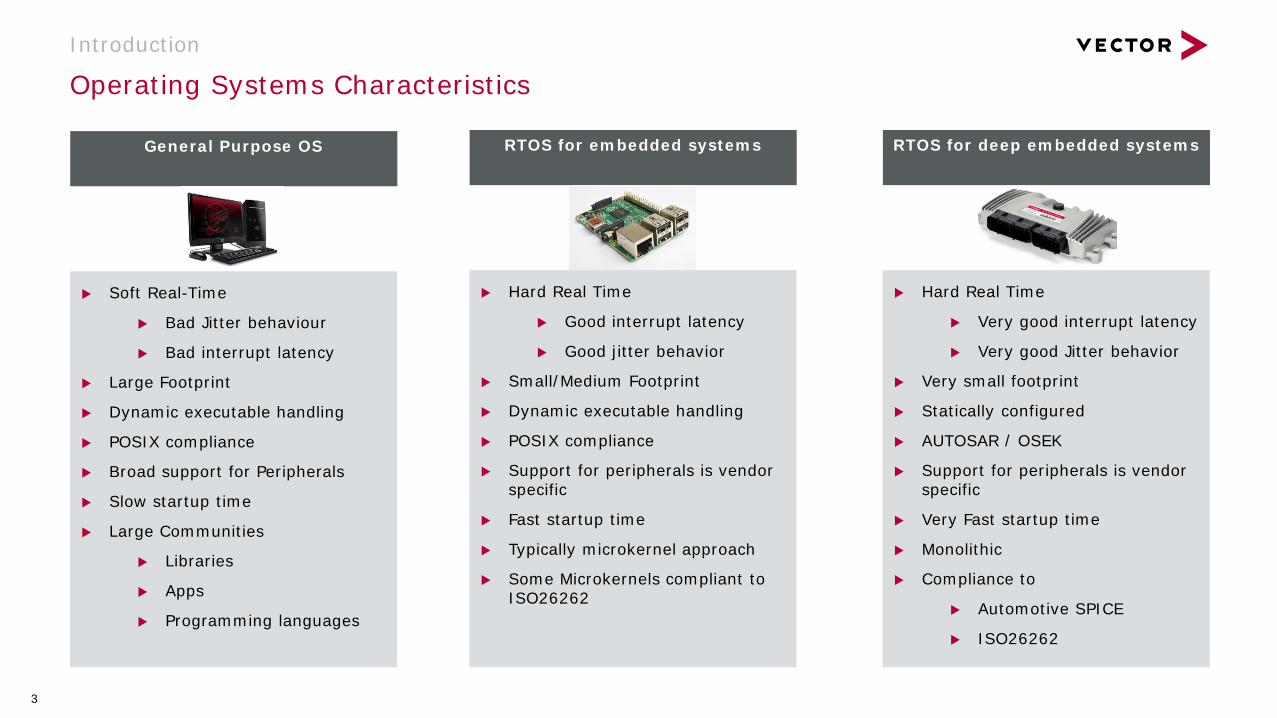
Operating Systems Characteristics Introduction
RTOS for deep embedded systems
Hard Real Time
Very good interrupt latency
Very good Jitter behavior
Very small footprint
Statically configured
AUTOSAR / OSEK
Support for peripherals is vendor specific
Very Fast startup time
Monolithic
Compliance to
Automotive SPICE
ISO26262
RTOS for embedded systems
Hard Real Time
Good interrupt latency
Good jitter behavior
Small/Medium Footprint
Dynamic executable handling
POSIX compliance
Support for peripherals is vendor specific
Fast startup time
Typically microkernel approach
Some Microkernels compliant to ISO26262
General Purpose OS
Soft Real-Time
Bad Jitter behaviour
Bad interrupt latency
Large Footprint
Dynamic executable handling
POSIX compliance
Broad support for Peripherals
Slow startup time
Large Communities
Libraries
Apps
Programming languages
4
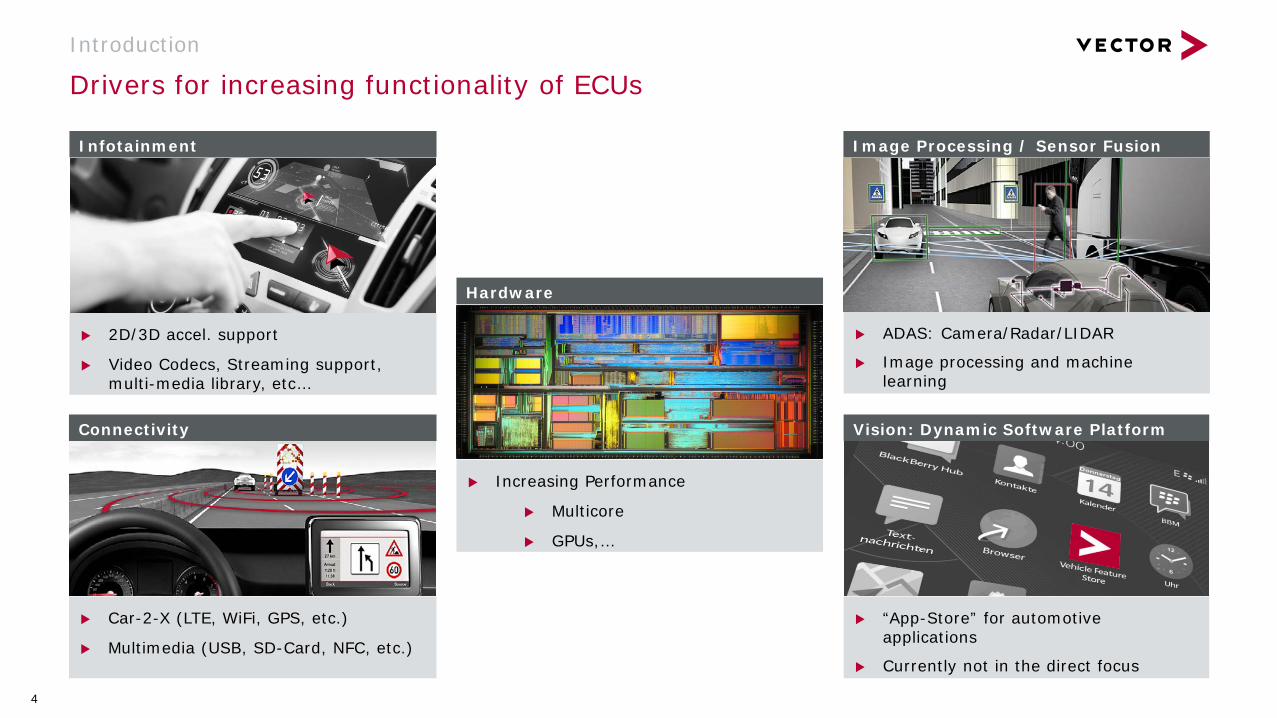
Drivers for increasing functionality of ECUs Introduction
ADAS: Camera/Radar/LIDAR
Image processing and machine learning
Image Processing / Sensor Fusion
Connectivity
Car-2-X (LTE, WiFi, GPS, etc.)
Multimedia (USB, SD-Card, NFC, etc.)
“App-Store” for automotive applications
Currently not in the direct focus
Vision: Dynamic Software Platform
2D/3D accel. support
Video Codecs, Streaming support, multi-media library, etc…
Infotainment
Hardware
Increasing Performance
Multicore
GPUs,…
5
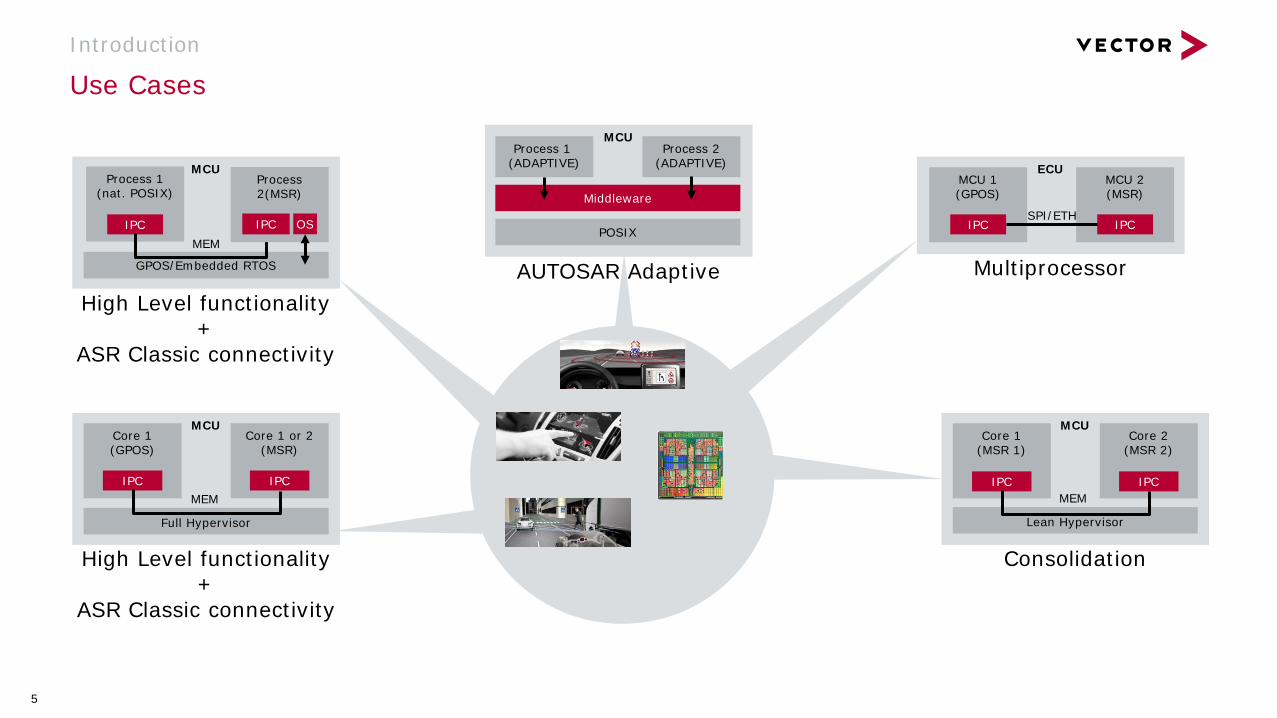
Use Cases Introduction
Consolidation
MCU Core 1
(MSR 1) Core 2
(MSR 2)
IPC IPC MEM
Lean Hypervisor
MCU Core 1 (GPOS)
Core 1 or 2 (MSR)
IPC IPC MEM
Full Hypervisor
High Level functionality +
ASR Classic connectivity
ECU MCU 1 (GPOS)
MCU 2 (MSR)
IPC IPC SPI/ETH
Multiprocessor
MCU Process 1
(nat. POSIX)
IPC MEM
GPOS/Embedded RTOS
Process 2(MSR)
IPC OS
High Level functionality +
ASR Classic connectivity
MCU Process 1
(ADAPTIVE) Process 2
(ADAPTIVE)
POSIX
Middleware
AUTOSAR Adaptive
6
Introduction
How to integrate high level functionality?
And what about deep embedded systems?
Summary
Agenda
7
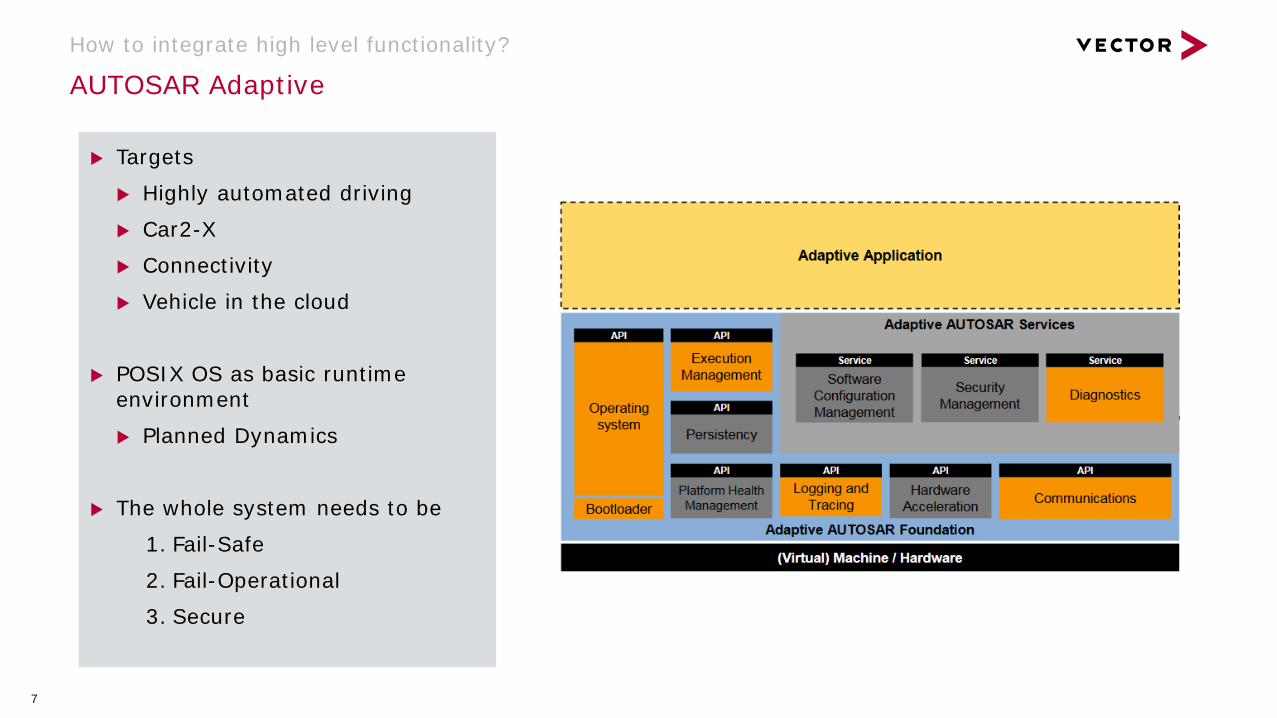
AUTOSAR Adaptive How to integrate high level functionality?
Targets
Highly automated driving
Car2-X
Connectivity
Vehicle in the cloud
POSIX OS as basic runtime environment
Planned Dynamics
The whole system needs to be
1. Fail-Safe
2. Fail-Operational
3. Secure
8
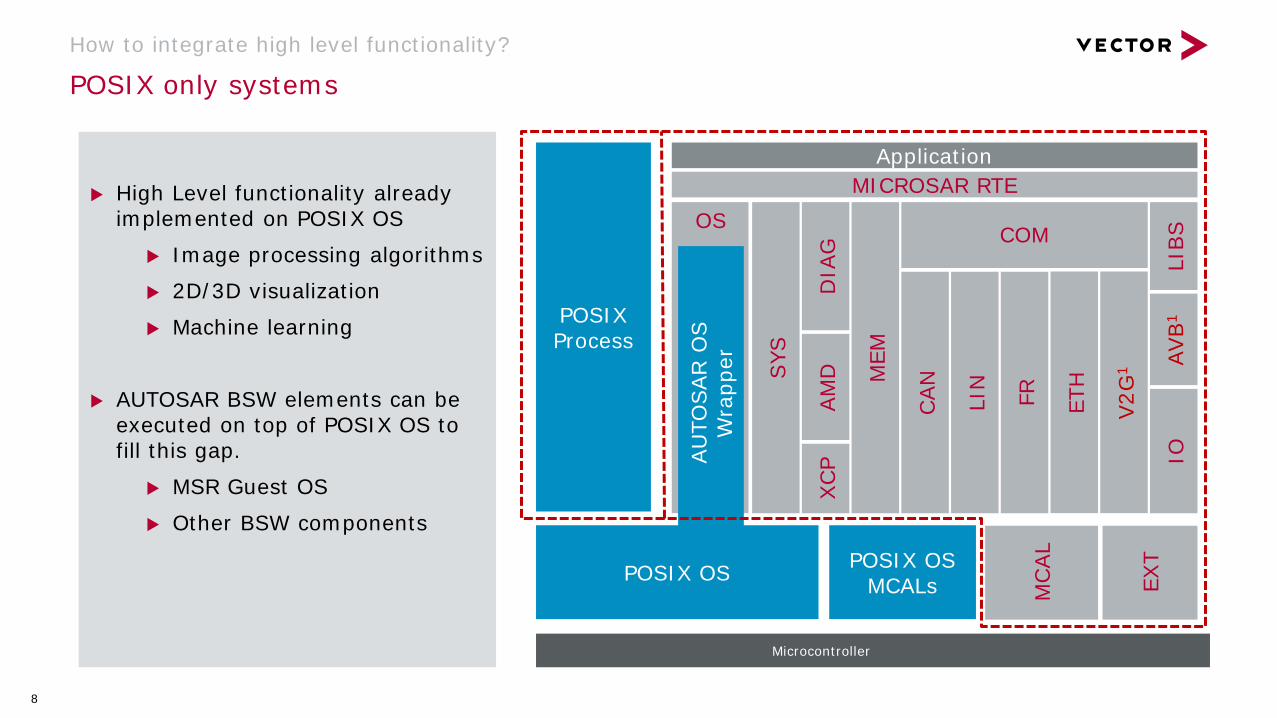
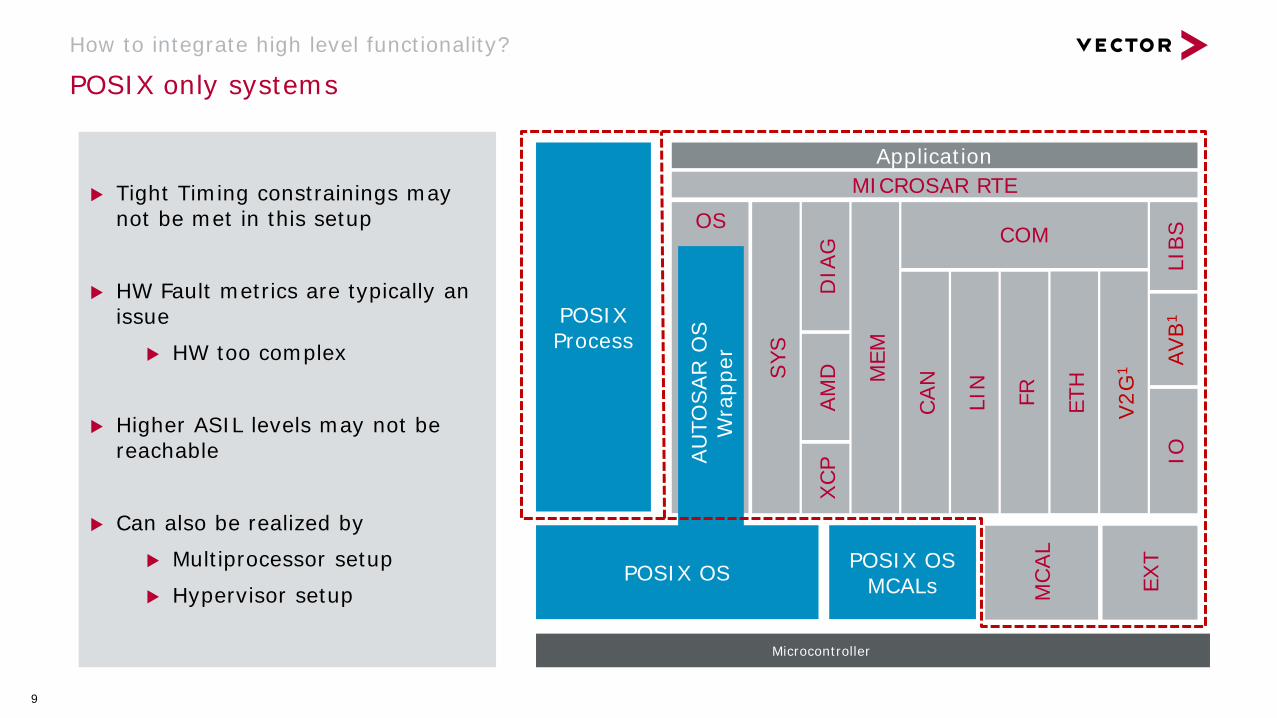
POSIX only systems How to integrate high level functionality?
Microcontroller
MCAL
Application MICROSAR RTE
OS
AUTO
SAR O
S
Wra
pper
XCP
SYS
DIA
G
AM
D
MEM
COM
IO
LIN
CAN
FR
ETH
V2G
1
EXT
LIBS
AVB
1
POSIX OS POSIX OS MCALs
POSIX Process
High Level functionality already implemented on POSIX OS
Image processing algorithms
2D/3D visualization
Machine learning
AUTOSAR BSW elements can be executed on top of POSIX OS to fill this gap.
MSR Guest OS
Other BSW components
9
POSIX only systems How to integrate high level functionality?
Microcontroller
MCAL
Application MICROSAR RTE
OS
AUTO
SAR O
S
Wra
pper
XCP
SYS
DIA
G
AM
D
MEM
COM
IO
LIN
CAN
FR
ETH
V2G
1
EXT
LIBS
AVB
1
POSIX OS POSIX OS MCALs
POSIX Process
Tight Timing constrainings may not be met in this setup
HW Fault metrics are typically an issue
HW too complex
Higher ASIL levels may not be reachable
Can also be realized by
Multiprocessor setup
Hypervisor setup
10
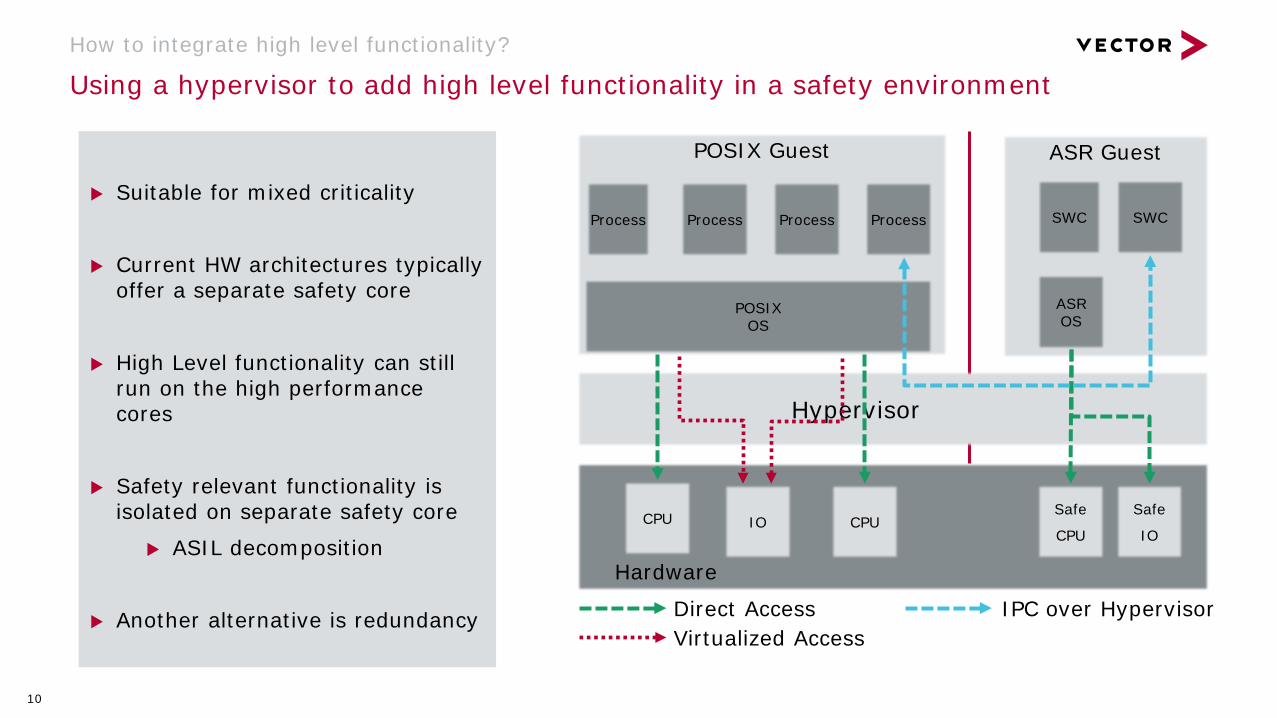
Using a hypervisor to add high level functionality in a safety environment How to integrate high level functionality?
Suitable for mixed criticality
Current HW architectures typically offer a separate safety core
High Level functionality can still run on the high performance cores
Safety relevant functionality is isolated on separate safety core
ASIL decomposition
Another alternative is redundancy
POSIX Guest
POSIX OS
ASR Guest
ASR OS
Process Process SWC SWC
Hardware
Hypervisor
Safe
CPU
Safe
IO CPU IO
Direct Access
Virtualized Access
IPC over Hypervisor
CPU
Process Process
11
Introduction
How to integrate high level functionality?
And what about deep embedded systems?
Summary
Agenda
12
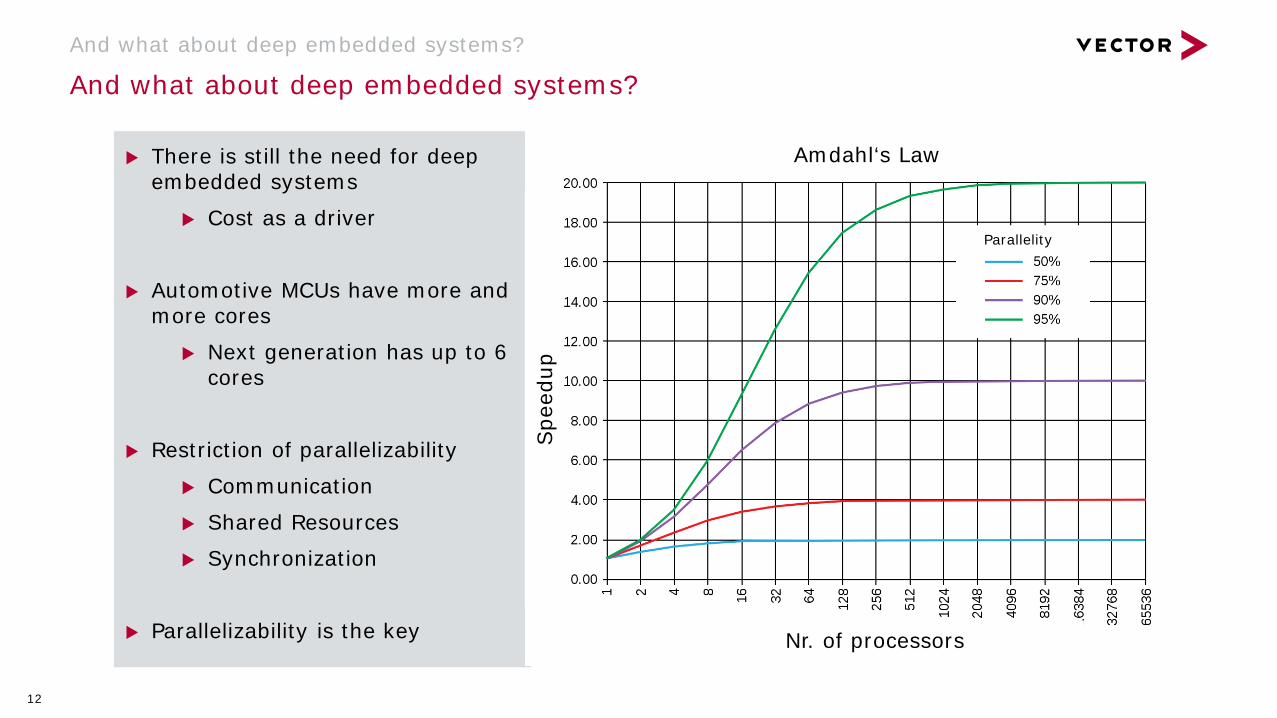
And what about deep embedded systems? And what about deep embedded systems?
There is still the need for deep embedded systems
Cost as a driver
Automotive MCUs have more and more cores
Next generation has up to 6 cores
Restriction of parallelizability
Communication
Shared Resources
Synchronization
Parallelizability is the key
Amdahl‘s Law
Nr. of processors
Spe
edup
Parallelity
13
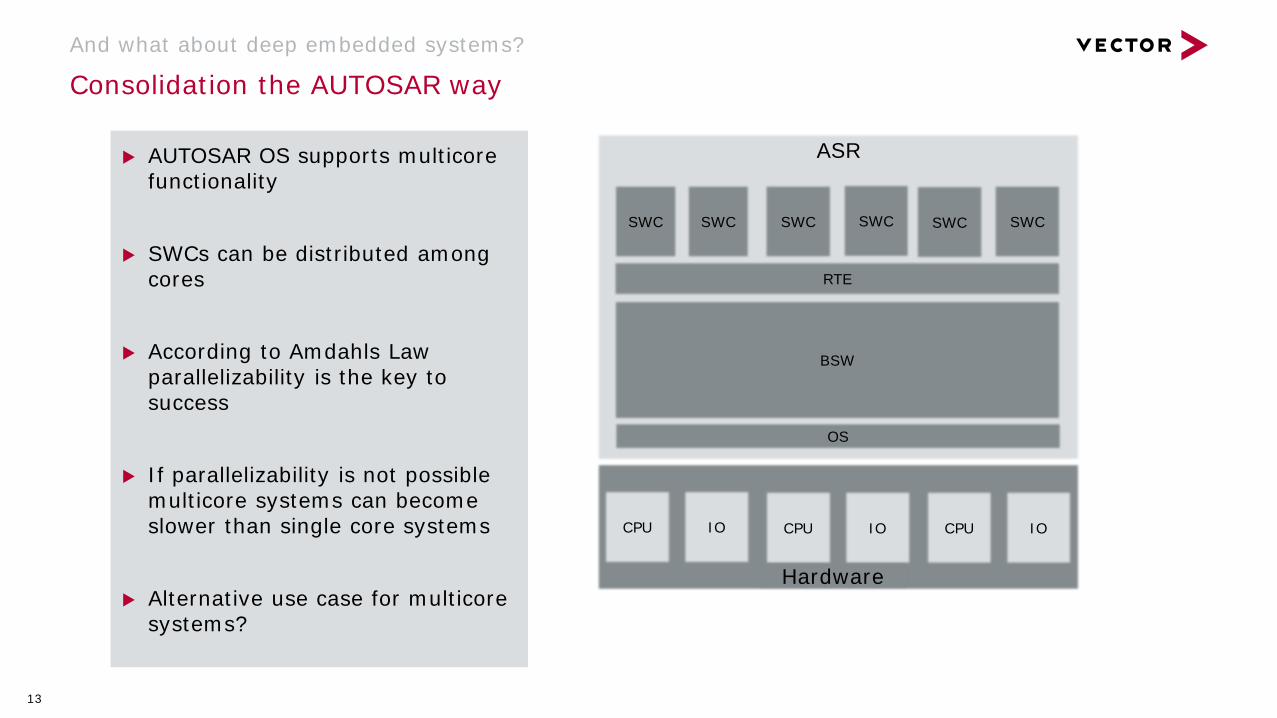
Consolidation the AUTOSAR way And what about deep embedded systems?
AUTOSAR OS supports multicore functionality
SWCs can be distributed among cores
According to Amdahls Law parallelizability is the key to success
If parallelizability is not possible multicore systems can become slower than single core systems
Alternative use case for multicore systems?
ASR
OS
CPU IO CPU IO CPU IO
SWC SWC SWC SWC
Hardware
SWC SWC
RTE
BSW
14
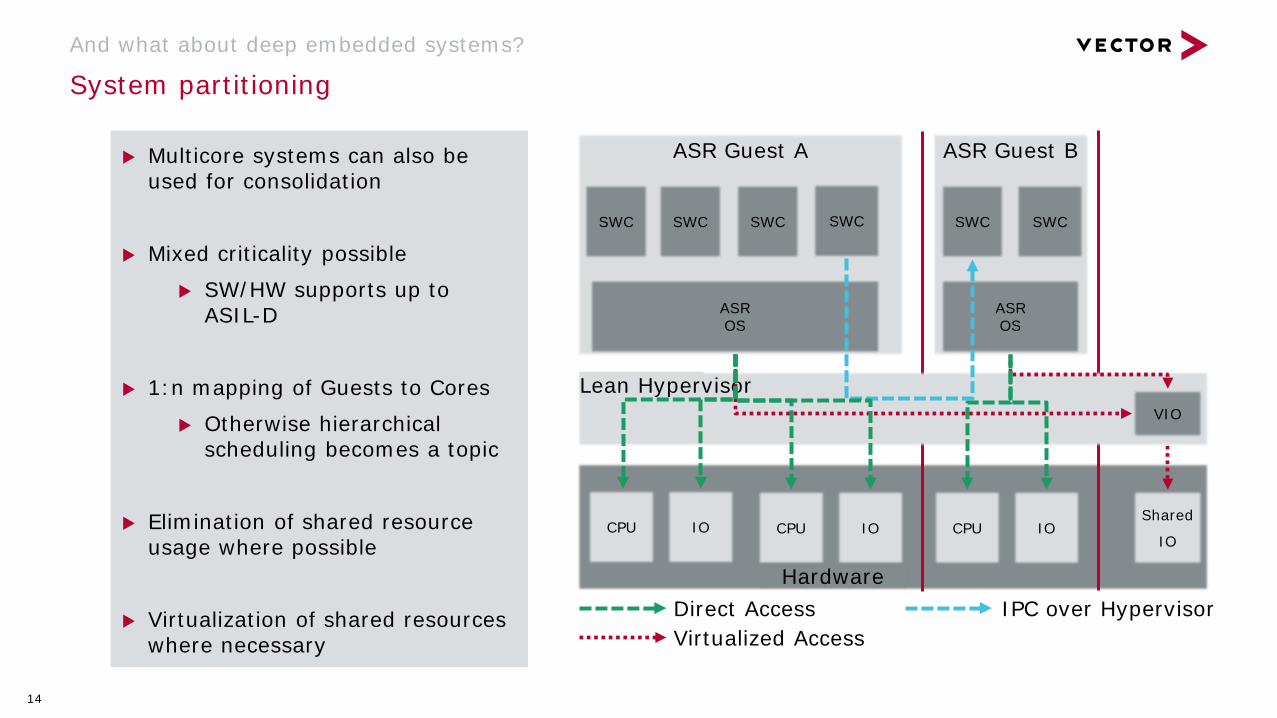
System partitioning And what about deep embedded systems?
Multicore systems can also be used for consolidation
Mixed criticality possible
SW/HW supports up to ASIL-D
1:n mapping of Guests to Cores
Otherwise hierarchical scheduling becomes a topic
Elimination of shared resource usage where possible
Virtualization of shared resources where necessary
ASR Guest A
ASR OS
ASR Guest B
ASR OS
Shared
IO CPU IO CPU IO CPU IO
SWC SWC SWC SWC
Hardware Direct Access
Virtualized Access
IPC over Hypervisor
VIO
Lean Hypervisor
SWC SWC
15
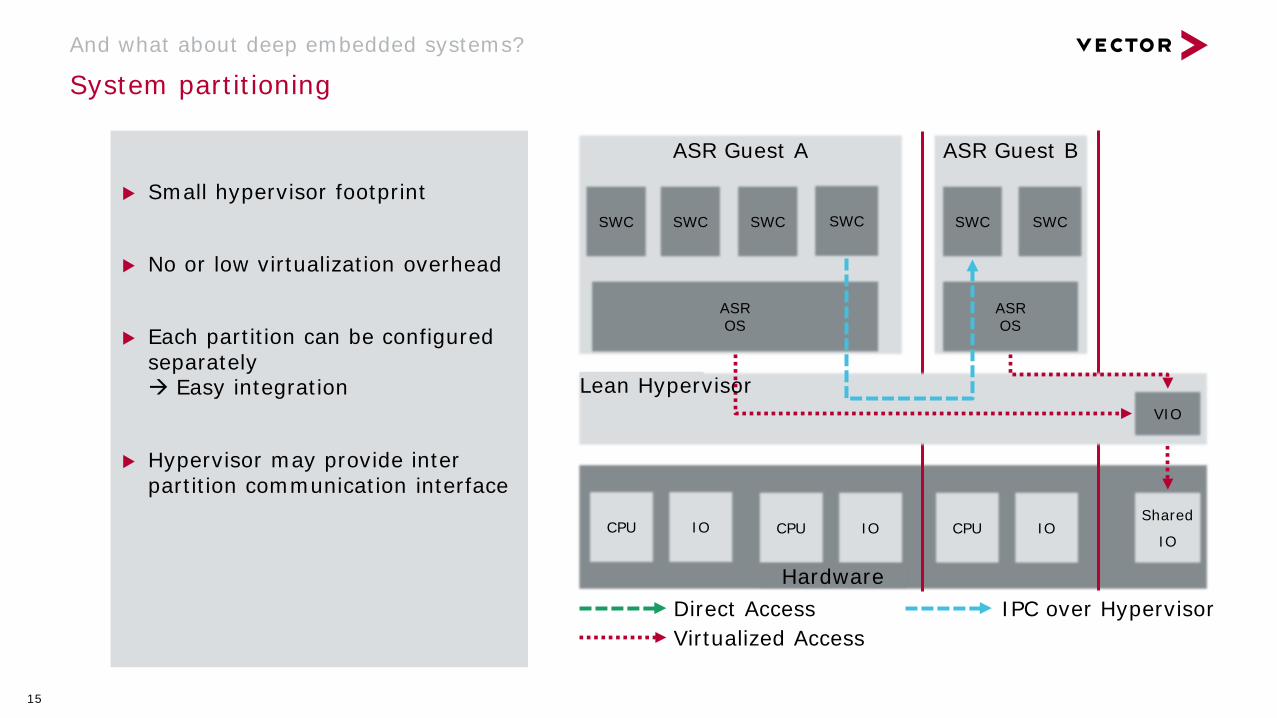
System partitioning And what about deep embedded systems?
Small hypervisor footprint
No or low virtualization overhead
Each partition can be configured separately Easy integration
Hypervisor may provide inter partition communication interface
ASR Guest A
ASR OS
ASR Guest B
ASR OS
Shared
IO CPU IO CPU IO CPU IO
SWC SWC SWC SWC
Hardware Direct Access
Virtualized Access
IPC over Hypervisor
VIO
Lean Hypervisor
SWC SWC

16
Introduction
How to integrate high level functionality?
And what about deep embedded systems?
Summary
Agenda
17
Summary Summary
POSIX Guest
POSIX OS
ASR Guest
ASR OS
Process Process SWC SWC
Hardware
Hypervisor
Safe
CPU
Safe
IO CPU IO
Direct Access
Virtualized Access
IPC over Hypervisor
CPU
Process Process
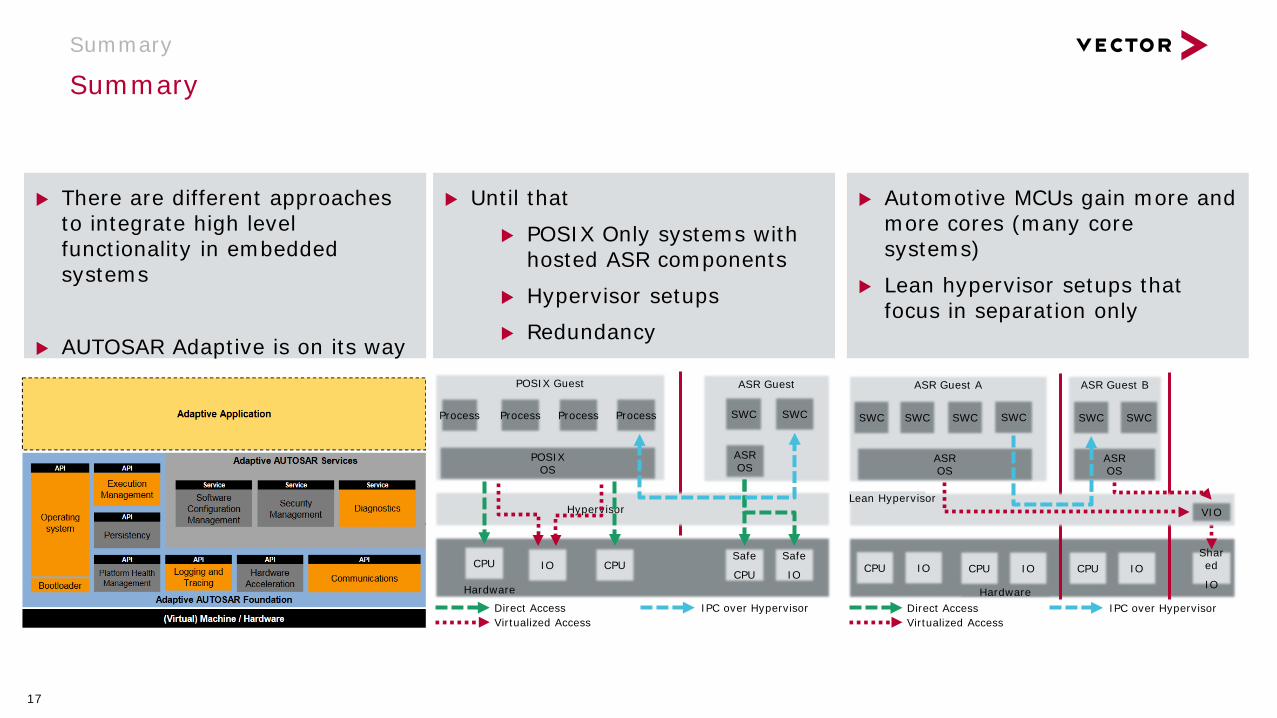
There are different approaches to integrate high level functionality in embedded systems
AUTOSAR Adaptive is on its way
Until that
POSIX Only systems with hosted ASR components
Hypervisor setups
Redundancy
Automotive MCUs gain more and more cores (many core systems)
Lean hypervisor setups that focus in separation only
ASR Guest A
ASR OS
ASR Guest B
ASR OS
Shared
IO CPU IO CPU IO CPU IO
SWC SWC SWC SWC
Hardware Direct Access
Virtualized Access
IPC over Hypervisor
VIO Lean Hypervisor
SWC SWC

18 © 2016. Vector Informatik GmbH. All rights reserved. Any distribution or copying is subject to prior written approval by Vector. V1.0 | 2016-11-25
For more information about Vector and our products please visit www.vector.com
Author: Dr. Timo Kerstan Vector Germany


















