Quantifying uncertainties associated with depth duration frequency curves
13
ORIGINAL PAPER Quantifying uncertainties associated with depth duration frequency curves Majid Mirzaei • Yuk Feng Huang • Teang Shui Lee • Ahmed El-Shafie • Abdul Halim Ghazali Received: 10 April 2013 / Accepted: 28 July 2013 / Published online: 29 August 2013 Ó Springer Science+Business Media Dordrecht 2013 Abstract Uncertainty in depth–duration–frequency (DDF) curves is usually disregarded in the view of difficulties associated in assigning a value to it. In central Iran, precipitation duration is often long and characterized with low intensity leading to a considerable uncertainty in the parameters of the probabilistic distributions describing rainfall depth. In this paper, the daily rainfall depths from 4 stations in the Zayanderood basin, Iran, were analysed, and a generalized extreme value distribution was fitted to the maximum yearly rainfall for durations of 1, 2, 3, 4 and 5 days. DDF curves were described as a function of rainfall duration (D) and return period (T). Uncertainties of the rainfall depth in the DDF curves were estimated with the bootstrap sampling method and were described by a normal probability density function. Standard deviations were modeled as a function of rainfall duration and rainfall depth using 10 4 bootstrap samples for all the durations and return periods considered for each rainfall station. Keywords Uncertainty analysis Depth duration frequency curves Generalized extreme value distribution Bootstrap sampling M. Mirzaei (&) A. El-Shafie Faculty of Engineering and Built Environment, Universiti Kebangsaan Malaysia, Kuala Lumpur, Malaysia e-mail: [email protected] Y. F. Huang Faculty of Engineering and Science, Universiti Tuanku Abdul Rahman, Kuala Lumpur, Malaysia T. S. Lee A. H. Ghazali Faculty of Engineering, Universiti Putra Malaysia, Serdang, Selangor, Malaysia 123 Nat Hazards (2014) 71:1227–1239 DOI 10.1007/s11069-013-0819-3
-
Upload
abdul-halim -
Category
Documents
-
view
212 -
download
0
Transcript of Quantifying uncertainties associated with depth duration frequency curves

ORI GIN AL PA PER
Quantifying uncertainties associated with depth durationfrequency curves
Majid Mirzaei • Yuk Feng Huang • Teang Shui Lee • Ahmed El-Shafie •
Abdul Halim Ghazali
Received: 10 April 2013 / Accepted: 28 July 2013 / Published online: 29 August 2013� Springer Science+Business Media Dordrecht 2013
Abstract Uncertainty in depth–duration–frequency (DDF) curves is usually disregarded
in the view of difficulties associated in assigning a value to it. In central Iran, precipitation
duration is often long and characterized with low intensity leading to a considerable
uncertainty in the parameters of the probabilistic distributions describing rainfall depth. In
this paper, the daily rainfall depths from 4 stations in the Zayanderood basin, Iran, were
analysed, and a generalized extreme value distribution was fitted to the maximum yearly
rainfall for durations of 1, 2, 3, 4 and 5 days. DDF curves were described as a function of
rainfall duration (D) and return period (T). Uncertainties of the rainfall depth in the DDF
curves were estimated with the bootstrap sampling method and were described by a normal
probability density function. Standard deviations were modeled as a function of rainfall
duration and rainfall depth using 104 bootstrap samples for all the durations and return
periods considered for each rainfall station.
Keywords Uncertainty analysis � Depth duration frequency curves �Generalized extreme value distribution � Bootstrap sampling
M. Mirzaei (&) � A. El-ShafieFaculty of Engineering and Built Environment, Universiti Kebangsaan Malaysia, Kuala Lumpur,Malaysiae-mail: [email protected]
Y. F. HuangFaculty of Engineering and Science, Universiti Tuanku Abdul Rahman, Kuala Lumpur, Malaysia
T. S. Lee � A. H. GhazaliFaculty of Engineering, Universiti Putra Malaysia, Serdang, Selangor, Malaysia
123
Nat Hazards (2014) 71:1227–1239DOI 10.1007/s11069-013-0819-3

1 Introduction
Depth duration frequency (DDF) curves are generally used to assess the extreme character of
rainfall in hydraulic and hydrology in general. In the design of dams, for example, it is crucial to
have reliable estimates of extreme rainfall depths in the determination of the required discharge
capacity of the spillway in order to prevent overtopping or dam breaking. While underestimation
of these extreme values leads to an unacceptable risk, overestimation results in the construction
of costly infrastructures that will be underused most of the time. The first step in construction of
DDF curves is to fit some theoretical distribution to the extreme rainfall amounts for a number of
fixed durations. Although many common distributions can be used for fitting purposes, the
generalized extreme value (GEV) distribution is applied herein. The GEV distribution has been
used worldwide to model extreme rainfall (Fowler and Kilsby 2003; and Koutsoyiannis 2004). It
has been widely used in frequency modeling of heavy precipitation (Overeem et al. 2008; Fowler
and Ekstrom 2009), floods (Cunderlik and Ouarda 2007), and other variables. The main prob-
lems to be solved in the estimated GEV parameters are to be correlated for different durations and
are the determination of the unknown coefficients and uncertainty in this relationship. It is
important to assess the uncertainties related to extreme rainfall estimates and to propagate those
uncertainties into design decisions and risk assessment (Coles et al. 2003).
Burn (2003) represented resampling technique to calculate uncertainties and confidence
intervals for flood quantiles. The bootstrap sampling method is used both for the estimation of
correlation between estimated GEV parameters and for the confidence bands of the DDF curves.
The bootstrap method, first introduced and named by Efron (1979), is a resampling technique for
estimating the properties, such as the variance, of an estimator or statistic. The idea behind
bootstrap is that the sample values are the best guide to the underlying true distribution even
when the information about the true distribution is lacking. The advantage of this method over
analytical approximation in the classic method is its relative simplicity in implementation. It has
been widelyused in uncertainty analysis, especially when the analytical form is difficult to derive
or approximate (e.g., Abrahart 2001; Srinivas and Srinivasan 2005). Bootstrap sampling is a
technique for determining the accuracy of statistics in circumstances in which confidence
intervals cannot be obtained analytically or when an approximation based on the limit distri-
bution is not satisfactory (Davison and Hinkley 1997). Bootstrap techniques have become very
popular in many areas of environmental sciences, including frequency analysis in climatology
and hydrology (Dunn 2001; Hall et al. 2004; Ames 2006; Kysely 2009; Twardosz 2009; Fowler
and Ekstrom 2009). There are two basic approaches to the bootstrap: While the nonparametric
bootstrap is based on resampling with replacement from a given sample and calculating the
required statistic from a large number of repeated samples (it is often termed simply ‘resam-
pling’), the idea of the parametric bootstrap is to randomly generate samples from a parametric
model (distribution) fitted to the data and to calculate the statistic from a large number of
randomly drawn samples. In both cases, one attempts to infer a distribution of the estimate of a
given statistic (e.g., model parameter, quantile of a distribution) from the available data.
The motivation of this study comes from a desire to obtain uncertainties in DDF curves
based on a bootstrap method analysis. The DDF curves and their uncertainties for four
stations in the western part of the Zayanderood basin in central Iran using the Bootstrap
method are to be estimated. The bootstrap method, a simple nonparametric technique
(Efron 1979) is proposed in this paper as it is simple to describe and easy to implement.
The paper is organized as follows: second section introduces the methods used in the
analysis, third section describes the analyzed area and the data sets used in the study. In
fourth and fifth sections, the results are presented and discussed. Sixth section draws up the
conclusion of the study.
1228 Nat Hazards (2014) 71:1227–1239
123

2 Case study area
In this research, the upper part of the west of the Zayanderood River catchment area in
central Iran, between the longitudes of 32� 1701000N and 33� 1204900N and the latitudes of
50� 103600E and 50� 4602600E (see Fig. 1), is studied. This area was selected because it
covers the main source of the stream flow in the Zayanderood River and it has a reasonably
dense network of rain gauge stations. This semi-arid region has an annual average pre-
cipitation of 611 mm and an annual average temperature of 11 �C; there is a seasonal
distribution of precipitation with the wet season being in autumn, winter and spring, and
the dry season in summer. There are 16 rain gauge stations located in the study area, each
with more than 30-year daily rainfall records. The four selected stations have more than
50 years of daily rainfall data records. All the rainfall stations are depicted in Fig. 2.
Table 1 lists the rainfall stations used in this study.
3 Fitted model
The principle behind fitting several distributions to the data is to find the best type of
distribution that gives the highest probability of reproducing the observed data. As pre-
viously mentioned, the GEV distribution has been used worldwide to model extreme
rainfall events, and in this study, the GEV distribution was applied to fit the distribution of
24, 48, 72, 96 and 120 h maximum annual rainfall data.
Fig. 1 Location map of Zayanderood basin in Iran (a), location map of study area in Zayanderood basin(b) and map of study area (c)
Nat Hazards (2014) 71:1227–1239 1229
123

The GEV distribution incorporates the Gumbel’s type I (k = 0), Frechet’s type II
(k \ 0) and the Weibull or type III (k [ 0) distributions. The GEV distribution has the
cumulative distribution function:
F xð Þ ¼ exp � 1� kx� nð Þ
a
� �1=k( )
k 6¼ 0
F xð Þ ¼ exp � exp � x� nð Þa
� �� �k ¼ 0
where n ? a/k B x\ ? ? for k \ 0, -?\ x \ ? ? for k = 0, and -?\ x \ n ? a/k
for k [ 0. Here, n, a and k are the location, scale and shape parameters, respectively. The
quantiles of the GEV distribution are given in terms of the parameters and the cumulative
probability p by
Fig. 2 Locations of the rainfall-gauging stations within the study area
1230 Nat Hazards (2014) 71:1227–1239
123

xp ¼ nþ ak
1� � ln pð Þð Þkh i
k 6¼ 0
xp ¼ n� a ln � ln pð Þð Þk ¼ 0:
4 L moments
The parameters of each distribution were estimated using one of the following methods,
namely: moments, maximum likelihood, least squares or L-moments (Singh 1998). The
choice of the method for estimating the parameters, where applicable, has been based on
the least number of intensive computations required. For the small samples, the estimates
based on L-moments generally have low standard deviation and is not computationally
more difficult than maximum likelihood with a Bayesian prior distribution; therefore, the
method of L-moments is chosen for this study.
n ¼ k1 �a
k1� C 1þ k
� �� a ¼ k2k
1� 2�k �
C 1þ k� �
k ¼ 7:8590cþ 2:9554c2;
c ¼ 2= 3þ s3ð Þ � logð2Þ=log 3ð Þ:
The L moment estimators k1; k2; and s3 ¼ k3
.k2 (L skewness) were obtained by using an
unbiased estimator of the first three probability-weighted moments defined as
br ¼ nþ ak
1� r þ 1ð Þ�kC 1þ kð Þh i.
ðr þ 1Þ
The unbiased estimator of br (Landwehr et al. 1979; Hosking and Wallis 1995) is:
br ¼Xn
i¼1
i� 1ð Þ i� 2ð Þ i� 3ð Þ. . . i� rð Þn n� 1ð Þ n� 2ð Þ. . . n� rð Þ x ið Þ
� �
r ¼ 0; 1; 2; . . .;
where the x(i) are the ordered observations from a sample of size{x(1) B x(2) B …Bx(n)}
and k1 = b0, k2 = 2b1 - b0, and k1 = 6b2 - 6b2 ? b2 (Hosking 1990a, b; Wang 1996).
The L moment estimators for the GEV distribution were evaluated using the daily rainfall
data from 1954 to 2009; these series were derived and plotted for the four selected rainfall
stations (Table 1; Fig. 2). To estimate the less probable maximum annual rainfalls with
high return periods, the extreme data were fitted to the GEV distribution. In general, the
Table 1 Selected stations, their record length, latitude, longitude
Station name Nationalcode
Studycode
Data periodFrom-To
Latitude(N)
Longitude(E)
Elevation(m)
Chelgerd 42001 S1 1954–2009 50.13 32.45 2,324
Damaneh 42004 S2 1954–2009 50.48 33.02 2,300
Shahrukh Palace 42003 S3 1958–2009 50.47 32.65 2,098
Sade Zayanderood 42007 S4 1955–2009 50.78 32.72 1,990
Nat Hazards (2014) 71:1227–1239 1231
123

assessment indicated that the GEV distribution was best fitted to the annual maximum
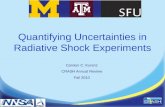
daily rainfalls at all stations of the study area. Figure 3 shows the annual maximum daily
rainfalls against their GEV theoretical probability distributions.
In this paper, c = a/n is considered instead of a. The advantage of using c is that its
correlation with k is weak. For all the stations, a GEV distribution was fitted separately to
the running annual maximum for durations of 24, 48, 72, 96 and 120 h.
5 Bootstrap sampling
To investigate the uncertainty in DDF curves, the bootstrapping method is used to calculate
the confidence bands of the DDF curves. The bootstrap, introduced by Efron (1979), is a
technique for determining the accuracy of statistics in circumstances in which confidence
intervals cannot be obtained analytically or when an approximation based on the limit
distribution is not satisfactory (Efron and Tibshirani 1993; Davison and Hinkley 1997).
Zucchini and Adamson (1989) were the first who used the bootstrap to determine the
uncertainty of design storms. There are two basic approaches to the bootstrap: (1) Non-
parametric bootstrap, which is based on resampling with replacement from a given sample
and calculating the required statistic from a large number of repeated samples (it is often
termed ‘resampling’), (2) Parametric bootstrap that randomly generates samples from a
parametric model (distribution) fitted to the data and calculates the statistics from a large
0
50
100
150
200
250
300
350
0 100 200 300
S1
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
S2
0
20
40
60
80
100
0 20 40 60 80 100
S3
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
S4
Fig. 3 The annual maximum daily rainfalls against their GEV theoretical probability distribution; thex-axis indicates the calculated amount from the GEV (mm) and y-axis indicates observed annual maximarainfall (mm)
1232 Nat Hazards (2014) 71:1227–1239
123

number of randomly drawn samples. In this study, the nonparametric bootstrap was applied
in analysis of the observed datasets. The principle of the nonparametric bootstrap is to
provide a way to simulate repeated observations from the population (Fig 4). Table 2
shows the estimated GEV parameters, c and k, and their respective standard deviations. As
expected, n increases with increasing duration, whereas the parameter c seldom increase
with increasing duration. There seems to be no systematic variation of k with duration. In
the bootstrap method, Diaconis and Efron 1983 and Efron and Tibshirani 1993 emphasized
that new samples (bootstrap samples) are generated by sampling with replacement from the
original sample. The standard deviations in Table 2 were derived from 104 bootstrap
samples.
Fig. 4 The principle of the nonparametric bootstrap
Table 2 Estimated GEV parameters for D = 24, 48, 72, 96 and 120 h. In all stations, standard deviationsare estimated with the bootstrap and given between brackets
D (h) S1 S2
n c k n c k
24 34.90 (2.47) 0.552 (0.002) 0.019 (0.024) 8.45 (1.11) 1.049 (0.003) 0.140 (0.016)
48 56.43 (9.49) 0.601 (0.005) 0.015 (0.015) 13.21 (1.48) 1.060 (0.005) 0.005 (0.012)
72 81.52 (11.83) 0.555 (0.004) 0.014 (0.014) 22.37 (3.73) 1.074 (0.010) 0.120 (0.014)
96 92.28 (16.27) 0.543 (0.006) 0.021 (0.020) 24.72 (5.99) 1.070 (0.011) 0.080 (0.015)
120 118.29 (20.87) 0.600 (0.003) 0.016 (0.027) 30.83 (6.18) 1.061 (0.016) 0.100 (0.068)
D (h) S3 S4
n c k n c k
24 11.27 (1.16) 1.117 (0.002) 0.181 (0.018) 9.86 (1.20) 0.698 (0.002) 0.088 (0.018)
48 17.34 (2.21) 1.075 (0.004) 0.159 (0.022) 14.47 (2.42) 0.671 (0.004) 0.141 (0.022)
72 22.53 (2.40) 1.129 (0.011) 0.145 (0.042) 20.05 (2.23) 0.638 (0.011) 0.118 (0.042)
96 28.63 (3.88) 1.197 (0.003) 0.170 (0.045) 23.36 (3.88) 0.701 (0.003) 0.101 (0.045)
120 34.87 (4.46) 1.124 (0.020) 0.186 (0.045) 30.50 (4.46) 0.715 (020) 0.119 (0.045)
Nat Hazards (2014) 71:1227–1239 1233
123

6 GEV parameters as a function of duration
One of the simpler and frequently used models that is popularly utilized in statistics is the
classical regression model
Y ¼ Xbþ 2
where Y = (Y1,…,Yn)t represents an observational vector of length n, X is a n 9 p known
matrix of explanatory variables and b is a vector of unknown regression coefficients of
length p that characterizes the relationship between observations and explanatory variables.
Classically, the vector 2 is assumed to be a zero-mean Gaussian vector. In this study, X
and b were defined as:
X ¼
1 ln D1
: :: :: :1 ln D5
0BBBB@
1CCCCA and b ¼ b0
b1
�
where D is rainfall duration for 24, 48, 72, 96 and 120 h and b0 and b1 are regression
coefficients of GEV parameters. The generalized least squares method was used to estimate
the regression coefficients b0 and b1.
Relations of the GEV parameters as a function of duration D (hours) were used to
construct rainfall DDF curves. In Fig. 5, the GEV parameters were plotted against D for
24, 48, 72, 96 and 120 h. It shows that c and the n have a linear relationship with the
logarithm of D for all the considered durations. There appears to be no systematic variation
of k with duration. According to the equations in the GEV regression model, the regression
coefficients were estimated for the 104 bootstrap samples. Table 3 shows the averages and
standard deviations of the regression coefficients. For k, the estimate of slope b1 was
approximately zero for most samples. This confirms that k may be considered to be
constant, and the X2-statistic in 5 % level was below the critical value.
7 Derivation of DDF curves
Now that the GEV parameters are described as a function of D, rainfall DDF curves are
constructed by substituting these relationships into below equation, so that the DDF curves
are given by:
x Tð Þ ¼ exp b0n þ b1n ln D �
� 1þ b0c þ b1c ln D � 1� � ln 1� T�1ð Þ½ �kGLS
n okGLS
0B@
1CA
Then, for station S1 is
x Tð Þ ¼ exp 3:2149þ 0:3125 ln Dð Þ
� 1þ 0:5699þ 0:0009 ln Dð Þ1� � ln 1� T�1ð Þ½ �0:0164n o
0:0164
0@
1A
1234 Nat Hazards (2014) 71:1227–1239
123

For station S2
x Tð Þ ¼ exp 1:1391þ 0:3031 ln Dð Þ
� 1þ 3:0658þ 0:00089 ln Dð Þ1� � ln 1� T�1ð Þ½ �0:0857n o
0:0857
0@
1A
0
40
80
120
160
0 24 48 72 96 120
0.30.350.4
0.450.5
0.550.6
0.65
0 24 48 72 96 120
0
0.005
0.01
0.015
0.02
0.025
0 24 48 72 96 120
D(hour)
05
101520253035
0 24 48 72 96 120
0.8
0.9
0.9
1.0
1.0
1.1
1.1
0 24 48 72 96 120
00.10.20.30.40.50.60.70.8
0 24 48 72 96 120
D(hour)
0
10
20
30
40
0 24 48 72 96 120
0.3
0.8
1.3
1.8
0 24 48 72 96 120
0
0.1
0.2
0.3
0.4
0 24 48 72 96 120
D(hour)
0
10
20
30
40
0 24 48 72 96 120
0
0.2
0.4
0.6
0.8
0 24 48 72 96 120
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0 24 48 72 96 120
D(hour)
S1 S2 S3 S4)
(mm
ξγ
k
Fig. 5 GEV parameters plotted against duration D. The solid lines represent the generalized relationship atthe Chelgerd station
Table 3 Results of the regression of GEV parameters for the four stations
GEV parameter S1 S2
b0 r b0
�b1 r b1
�b0 r b0
�b1 r b1
�
lnn 3.2149 0.0065 0.3125 0.0039 1.1391 0.0175 0.3031 0.0425
c 0.5699 0.3862 0.0009 0.073 3.0658 1.0842 0.00089 0.00038
k 0.0164 0.0096 0.0857 0.0051
GEV parameter S3 S4
b0 r b0
�b1 r b1
�b0 r b0
�b1 r b1
�
lnn 1.625 0.1756 0.4045 0.0235 1.453 0.278 0.4042 0.054
c 1.1419 0.3869 0.0009 0.0849 0.672 0.239 0.0034 0.0486
k 0.1659 0.0068 0.1105 0.0129
Nat Hazards (2014) 71:1227–1239 1235
123

For station S3
x Tð Þ ¼ exp 1:625þ 0:4045 ln Dð Þ
� 1þ 1:1419þ 0:0009 ln Dð Þ1� �ln 1� T�1ð Þ½ �0:1659n o
0:1659
0@
1A
For station S4
x Tð Þ ¼ exp 1:453þ 0:4042 ln Dð Þ
� 1þ 0:6725þ 0:0034 ln Dð Þ1� �ln 1� T�1ð Þ½ �0:1105n o
0:1105
0@
1A
By choosing a return period T, the rainfall depth x (mm) can be plotted as a function of
duration D using the above equations. Figure 6 presents the DDF curves for T = 5, 10, 20,
50 and 100 years. The curves show a strong increase in rainfall depth with D.
8 Modeling uncertainty in DDF curves
Uncertainty in DDF curves which is usually disregarded in view of the difficulties asso-
ciated in assigning a value to it should be considered in the design of hydraulic structures.
The bootstrap method was applied to assess these uncertainties. Only the uncertainty due to
the estimation of the GEV parameters and the associated sampling errors were evaluated in
this study. For each of the 104 bootstrap samples, the relationships between the GEV
parameters and duration were reestimated using the generalized least squares, so that 104
DDF curves could be constructed. For each DDF curve, the rainfall depths were derived for
100
150
200
250
300
350
400
20 30 40 50 60 70 80 90 100 110 120 130
Rai
nfa
ll D
epth
(m
m) 100
50
20
10
5
30
50
70
90
110
130
150
170
190
20 30 40 50 60 70 80 90 100 110 120 130
100
50
20
10
5
S2
40
60
80
100
120
140
160
180
20 30 40 50 60 70 80 90 100 110 120 130
Rai
nfa
ll D
epth
(m
m)
D (hr)
100
50
20
10
5
20
40
60
80
100
120
20 30 40 50 60 70 80 90 100 110 120 130
D (hr)
100
50
20
10
5
S4
S1
S3
Fig. 6 Rainfall DDF curves (solid lines) and 95 % confidence bands (dashed lines) for the return periods of5, 10, 20, 50 and 100 years at stations S1, S2, S3 and S4
1236 Nat Hazards (2014) 71:1227–1239
123

durations between 24 and 120 h in time steps of 1 h. Subsequently, for each of these
durations, the 104 depths were ranked in increasing order, and the 250th and 9750th values
were determined. These values were then plotted to form the 95 % confidence bands, as
shown in Fig. 6.
The relationship between standard deviation of rainfall depth and rainfall duration in
each return period was modeled as a function of D and T. For each station, standard
deviations were estimated using the 104 bootstrap samples for five durations and five return
periods as:
For station S1:
r ¼ 1:852þ 0:0335Dþ 0:0389T
For station S2:
r ¼ 0:5037þ 0:0119Dþ 0:0168T
For station S3:
r ¼ 0:0151þ 0:0196Dþ 0:1049T
For station S4:
r ¼ 0:0001þ 0:0116Dþ 0:0150T
The regression coefficients were estimated with the ordinary least squares method.
Figure 7 shows the DDF curves for return period (T) equal to 50 and 100 years for station
S1. The normal probability density functions which describe the uncertainties in these
curves are plotted for duration (D) corresponding to 48 and 96 h. According to the DDF
curves and their 95 % confidence bands, for longer return periods (T) uncertainty increases
substantially. Uncertainty can be described by a distribution. The bootstrap distribution of
estimated quantiles is described by the normal distribution. The parameters l and r of the
normal distribution that are the mean and standard deviation are modeled as a function of
D and T.
Fig. 7 Rainfall DDF curves (solid lines) for T = 50 and 100 years and normal probability density functions(dashed lines) which describe the uncertainties in the DDF curves for D 48 and 96 h
Nat Hazards (2014) 71:1227–1239 1237
123

9 Conclusions
Extreme rainfall in the Zayanderood River basin in central Iran for durations between 24
and 120 h was studied. The GEV parameters of this time series were estimated using the
method of L-moments. Standard deviations among the estimated GEV parameters were
obtained using the bootstrap method. To calculate the correlation among estimated GEV
parameters at different durations, the generalized least squares method was used to
describe the variation of these parameters as a function of time. It was found that the shape
parameter k of the GEV distribution does not change with time, and the parameter c rarely
increases with increasing duration. Accordingly, the coefficient of variation increases with
decrease in duration, suggesting that the simple scale relation being ruled out. Uncer-
tainties in rainfall DDF curves are generally ignored resulting in the risks being under-
estimated or completely eliminated. The valuable aspect of this study is that the uncertainty
in DDF curves due to sampling variability was modeled and evaluated. However, it should
be noted that other sources of uncertainty such as measurement errors and uncertainty in
the choice of the distribution had not been taken into account in this study. The following
conclusions can be arrived at:
1. For any of the stations, the DDF curve can be represented by a specific equation
derived from the analyses where GEV parameters were described as a function of
duration
2. Uncertainty in DDF curves due to sampling variability was modeled and evaluated. It
was also quantified with the Bootstrapping method and described with a normal
probability density function.
3. For longer return periods, it was found that uncertainty increase substantially
References
Abrahart RJ (2001) Single-model-bootstrap applied to neural network rainfall–runoff forecasting. In: Pro-ceedings of the 6th international conference on geo
Ames DP (2006) Estimating 7Q10 confidence limits from data: a bootstrap approach. J Water Resour PlanManag 132:204–208
Burn DH (2003) The use of resampling for estimating confidence intervals for single site and pooledfrequency analysis. Hydrol Sci J 48(1):25–38
Coles S, Pericchi L, Sisson S (2003) A fully probabilistic approach to extreme rainfall modeling. J Hydrol273:35–50
Cunderlik J, Ouarda T (2007) Regional flood-duration-frequency modeling in the changing environment.J Hydrol 318:276–291
Davison AC, Hinkley DV (1997) Bootstrap methods and their application. Cambridge University Press,Cambridge
Diaconis P, Efron B (1983) Computer-intensive methods in statistics. Sci Am 248(5):96–108Dunn PK (2001) Bootstrap confidence intervals for predicted rainfall quantiles. Int J Climatol 21:89–94Efron B (1979) Bootstrap methods: another look at the jackknife. Ann Stat 7:1–26Efron B, Tibshirani R (1993) An introduction to the bootstrap. Chapman & Hal, New YorkFowler H, Ekstrom M (2009) Multi-model ensemble estimates of climate change impacts on UK seasonal
precipitation extremes. Int J Climatol 29:385–416Fowler HJ, Kilsby CG (2003) A regional frequency analysis of United Kingdom extreme rainfall from 1961
to 2000. Int J Climatol 23:1313–1334Hall MJ, van den Boogaard HFP, Fernando RC, Mynett AE (2004) The construction of confidence intervals
for frequency analysis using resampling techniques. Hydrol Earth Syst Sci 8:235–246Hosking JM (1990a) L-moments: analysis and estimation of distributions using linear combinations of order
statistics. J R Stat Soc Ser B 52:105–124
1238 Nat Hazards (2014) 71:1227–1239
123

Hosking JR (1990b) L-moments: analysis and estimation of distributions using linear combinations of orderstatistics. J R Stat Soc B 52:105–124
Hosking JM, Wallis JR (1995) A comparison of unbiased and plotting-position estimators of L moments.Water Resour Res 31(8):2019–2025
Koutsoyiannis D (2004) Statistics of extremes and estimation of extreme rainfall: II. Empirical investigationof long rainfall records. Hydrol Sci J 49:591–610
Kysely J (2009) Trends in heavy precipitation in the Czech Republic over 1961–2005. Int J Climatol. doi:10.1002/joc.1784
Landwehr J, Matalas N, Wallis JR (1979) Probability weighted moments compared with some traditionaltechniques in estimating Gumbel parameters and quantiles. Water Resour Res 15:1055–1064
Overeem A, Buishand A, Holleman I (2008) Rainfall depth-duration-frequency curves and their uncer-tainties. J Hydrol 348:124–134
Singh VP (1998) Entropy-based parameter estimation in hydrology. Kluwer, DordrechtSrinivas VV, Srinivasan K (2005) Matched block bootstrap for resampling multiseason hydrologic time
series. Hydrol Process 19:3659–3682Twardosz R (2009) Probabilistic model of maximum precipitation depths for Krakow (southern Poland,
1886–2002). Theor Appl Climatol. doi:10.1007/s00704-008-00874Wang QJ (1996) Direct sample estimators of L moments. Water Resour Res 32(12):3617–3619Zucchini W, Adamson P (1989) Bootstrap confidence intervals for design storms from exceedance series.
Hydrol Sci J 34(1):41–48
Nat Hazards (2014) 71:1227–1239 1239
123