Apps Cpbcws Teamsitecpb Prod Documents Research Quadrant Quadrant 201205 Quadrant Asia

Computer Networks 53 (2009) 1967–1979
Contents lists available at ScienceDirect
Computer Networks
journal homepage: www.elsevier .com/ locate/comnet
QUAD: Quadrant-based relative location estimates for representativetopologies in wireless sensor networks
May Wong a, Demet Aksoy b,*
a Intel, Inc, 2200 Mission College Blvd, Santa Clara, CA (408) 765-050, United Statesb University of California, Computer Science, Davis, CA 95616, United States
a r t i c l e i n f o
Article history:Received 31 July 2007Received in revised form 9 December 2008Accepted 25 January 2009Available online 5 March 2009
Responsible Editor: J.C. de Oliveira
Keywords:Sensor networksLocalizationLocation estimatesRelative topologyRelative accuracy
1389-1286/$ - see front matter � 2009 Published bdoi:10.1016/j.comnet.2009.01.014
* Corresponding author. Tel.: +1 530 752 3601.E-mail address: [email protected] (D. Aksoy)
a b s t r a c t
Sensor networks consist of devices that make various observations in the environment andcommunicate these observations to a central processing unit from where users can accesscollected data. In this regard, users’ interpretation of collected data highly depends on thereported location of the sensor making an observation. GPS is an established technology toenable precise location information when deployed in open field. Yet, resource constraintsand size issues prohibit its use in small sensor nodes that are designed to be cost-efficient.Instead, locations are estimated using a number of approaches. To date, however, the focusof such estimations was based on individual accuracy of sensor locations in isolation to thecomplete network. In this paper, we discuss problems with such approaches in terms ofdata management and analysis. We propose a novel location estimation algorithm calledQUAD, quadrant-based localization, to enable representative topology information. In par-ticular, QUAD makes use of relative distances from landmark points to determine the quad-rant a node resides in and refines estimations according to neighbour providedinformation. QUAD makes use of uncertainty levels in estimates to further assist data anal-ysis. Our experiment results suggest significant improvements in individual accuracy priorto optional refinements. Drastic improvements are achieved in the overall topology usingrefinements.
� 2009 Published by Elsevier B.V.
1. Introduction
Wireless sensor nodes are used in a wide range of appli-cations such as scientific research, military, healthcare, andenvironmental monitoring. The basic responsibility of sen-sor networks is to collect information about the environ-ment and to communicate these observations to a datacollection point from where users access the collecteddata. A major motivation of sensor networks is that theusers should not have to travel to the monitored area tocollect data. In this regard, every user has to depend onthe location information provided by the sensor node thatmakes an observation. Such location information is a vitalkey for correct analysis, interpretation, and data manage-
y Elsevier B.V.
.
ment. In this regard, it is critical to illustrate a representa-tive picture of the overall topology to users.
In ad hoc deployments, however, sensor nodes can bedropped off from an airplane or scattered around ran-domly. Therefore, node locations are not known prior tothe deployment. Instead, they need to be discovered afterthe deployment. The process of estimating the unknownnode locations within the network is referred to as locali-zation. An established localization method is global loca-tion system (GPS). However, the limited power supply,size and cost considerations prohibit its deployment atevery sensor node. Instead, it is preferred to limit the num-ber of nodes with GPS antennas and then use estimationsfor the rest of the nodes. Observations are then reportedbased on such estimated locations. As a result the users’view of the monitored area highly depends on reportedlocations which are mostly estimates.

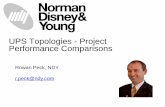
Fig. 1. Representative topology based on estimates is more importantthan reducing the individual errors reported in isolation to the network: Aand B are the actual locations of two sensors. A0 and B0 are the estimates ofone localization algorithm. A00 and B00 are the estimates of anotheralgorithm that results in a similar pair-wise error. However, theestimates, A0 and B0 result in a completely misleading overall topology.
1968 M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979
Obviously, errors are inevitable in estimates. In this re-gard, it is important to understand the impact of errors fora particular application. In Fig. 1, we illustrate a simpleexample with only two sensor nodes deployed in the field.The actual locations of A and B are represented by thelighter coloured circles. In Fig. 1a, we plot a set of localiza-tion estimates being reported as A0 and B0, respectively. Asillustrated, using this set of estimates, nodes would reporttheir observations as if collected from A0 and B0. To evaluatethe impact of estimation errors, consider another localiza-tion algorithm that produces location estimates of A00 andB00 for the same nodes as demonstrated in Fig. 1b. In thiscase, the Euclidean distance between the estimated loca-tions and the actual locations of each node is the same incomparison to the first set of estimates. However, the over-all topology represented is much closer to the actual one.
If we followed the traditional approach in localizationstudies, we would evaluate these two sets of estimatesbased on their individual node location accuracy and con-clude a similar error in these two sets of estimates. How-ever, these two sets of estimates have quite differentimplications for practical applications! In particular, therelative locations of A0 and B0 areincorrect in comparisonto A and B. In consequence, this may result in misleadingconclusions during data analysis. For instance, the advec-tion of a particulate pollutant may appear to be in the re-verse direction than it really is. In this example, eventhough the individual estimate errors are similar, the over-all topology formed by A00 and B00 is much better since therelative locations are correct in reference to the actualdeployment.
In general, the precise location of each sensor node isnot necessary in most sensor network applications [4].Yet, accurate overall topologies are vital for accurate iden-tification,1 routing, in network processing as well as overallanalysis of observations. There have been a number of local-ization proposals for wireless sensor networks, e.g.,[10,15,16,18,20]. To date, however, the main focus was onminimizing the Euclidean distance between the actual andthe estimated coordinates of each node independently inisolation to the rest of the network. Cricket [19], Centroid
1 For large-scale deployments, producing arbitrary addresses for billionsof nodes is not feasible; if estimated accurately, geographic locations canhelp identify nodes, routing, etc.
[7], SeRLoc [10], Active Badge [24], etc. require a high num-ber of landmarks to produce such estimates. Landmarks aresuper nodes with additional resources, e.g., GPS antennas,additional power and resources to allow precise knowledgeof their location. In practice, it is desirable to reduce thenumber of such landmarks or additional hardware at ordin-ary nodes, as required by DV-Position [18] and AHLoS [20].While APIT [9] requires nodes to move and to have accuratesignal strength measurements to produce estimates [25]discusses problems with signal strength based approaches[10,15,16] require highly dense networks with lots of neigh-bour nodes to produce reasonable estimates.
In this paper, we propose a novel location estimationalgorithm, quadrant-based location estimation (QUAD),that aims at calibrating estimates using different levels ofconfidence. Our focus is on the overall sensor networktopology constructed, rather than on individual estimatesas has been the major focus in previous studies. In partic-ular, the relative distances to known landmark locationsare evaluated to determine if the node resides East/West/South/North of the landmarks. Once the quadrants aredetermined, estimates are then generated using neighbourobservations with heterogeneous levels of confidence. Un-like approaches that require additional hardware, e.g.,[18,20], to allow such directional information, we merelyrely on radio communications for location estimations.
1.1. Our contributions
In this study we point out the major disadvantage inexisting location estimation algorithms: treating each indi-vidual node estimate independently in isolation to thecomplete network. We propose a novel localization algo-rithm, QUAD, to address this problem. In particular, we fo-cus on the following challenges for localization to enablelarge-scale sensor network deployments:
� Representative overall topology: Based on expert userinput, the relative locations of the nodes in the networkconstitute a critical piece of information that should bemaintained for accurate data management and analysis.QUAD enables such representative overall topologies.
� Minimal specialized hardware: In order to keep the over-all network economically feasible, additional hardware(e.g., GPS or directional antennas) should be avoidedwhenever possible. In this regard, QUAD relies merelyon regular radio communications for making locationestimates.
� Robustness to network density: The location estimationshould not be dependent on a specific network density,as parts of the network can be sparse while others aredense. In addition, topologies are prone to change overtime. QUAD is shown to be relatively robust to changesin network densities.
One major objective of our study is to reflect the confi-dence in the location estimates. Our performance evalua-tion results suggest significant improvements incomparison to previous algorithms. At top of all, our pro-posed algorithm can provide representative topologies forvarious network settings and densities.

M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979 1969
The rest of this paper is organized as follows: In Section2, we present our motivation behind QUAD. Section 3 de-scribes our proposed localization algorithm. Section 4 pre-sents results from our performance evaluation usingvarious network topologies. Finally, Section 5 concludesthis paper.
2. Motivation
Our main motivation in this study is the expert user,e.g., environmental engineers’, demand for maintaining arepresentative overall topology using estimated sensorlocations. Accuracy in relative locations enable accuratedata management and analysis of reported results. To illus-trate the problem further, consider a city which has beenpictured block by block in a distributed manner such thatthese individual pictures are later to be brought togetherto create a virtual city. In this reconstruction phase, if theblocks are mapped in correct relationship to each other,the individual errors would not cause a problem for navi-gating within the city. However if the blocks are mappedin conflicting locations, it would be highly problematic tonavigate within this virtual city.
Similar concerns arise in environmental engineeringapplications. As an example, if the flow direction of a pol-lutant is misleading, the location estimations are com-pletely useless even if they have a smaller Euclideandistance error in comparison to alternative estimates. Onthe other hand, representative overall topology wouldnot only enable accurate data analysis, but also correctinformation source selection [3].
In this regard, we examined the characteristics of exist-ing localization studies as summarized in the followingsection to develop an alternative approach. We then con-sidered implications for large-scale deployment projectssuch as PLASMA [2]. In the following subsections we out-line our observation that has lead to QUAD.
2.1. Problems with lateration
For basic wireless communications without additionalhardware, when a node receives a transmission, it can atbest estimate the distance from the sender. The sendercan be anywhere on a radius of this distance around the re-ceiver. As a result, a major technique applied in localizationis lateration, e.g., DV-Hop [17], DV-Distance [17], Smooth[16], etc. In its simplest form, lateration is based on thegeometry rule that ‘‘if you know the distance, di, from atleast three reference points with known locations, the ac-tual location should be at the intersection of the three cir-cles around the reference points with corresponding radiusof di”. The distance to a landmark is determined as the sumof the distances along the path between the landmark andthe node.2
Lateration [12,16,17] refers to finding the intersectionpoint of (at least three) circles around reference landmarks.
2 As distances to landmarks are the sums of distances along the path,even if individual distances between immediate neighbours are accurate,the sum is only an upper bound on the actual distance unless nodes arealigned on a perfect line.
If accurate distances are provided, the solution can be ob-tained by a set of equations in the form:
ðx1 � xÞ2 þ ðy1 � yÞ2 ¼ d21; ð1Þ
ðx2 � xÞ2 þ ðy2 � yÞ2 ¼ d22; ð2Þ
ðx3 � xÞ2 þ ðy3 � yÞ2 ¼ d23; ð3Þ
where (xi, yi) are the coordinates of landmark i and di is theestimated distance from the landmark i. In practice, how-ever, distance di can be misleading due to multi-hop andanisotropic nature of sensor topologies [11]. Such errorsresult in serious complications in location estimations.
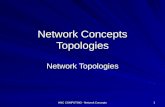
In Fig. 2, we demonstrate an illustrative example with asmall error in one distance estimate from a landmark. Inthe figure there are three landmarks at locations (x1, y1),(x2, y2), and (x3, y3). The particular sensor node is estimatedto be d1, d2, and d3 apart from these landmarks, respec-tively. If these distances were precise, we could accuratelyestimate the node’s location. Otherwise, as illustrated bythe example, we can end up with conflicting circles aroundthe landmarks that do not necessarily intersect. As demon-strated, it is possible that the error made in distance esti-mates d1, d2, and d3 can prevent obtaining an estimatefor the node’s location.
2.2. Implications for large-scale data management
With the popularity of sensor networks we observe thenumber of sensors increasing at a significant rate. Unat-tended and cheap sensor networks motivate scientistsetc. to deploy more and more sensors for observations theyneed to make. Such large-scale deployments pronouncelocalization problems even further.
For instance, PLAnetary Scale Monitoring Architecture(PLASMA) [2] is an interdisciplinary project that aims atproviding an integrated architecture for heterogeneoussensor systems to enable public access for user queries.In this regard, PLASMA consists of a large number of heter-ogeneous nodes that report observations to data collectionpoints. Data collection points allow users to issue queriesand receive processed replies with appropriate connectiv-
Fig. 2. Lateration can only provide a solution if the distances are non-conflicting. In practice, the distances d1, d2, and d3 are only approximated,and as a result the three circles might not even intersect at a commonpoint.

1970 M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979
ity to the Internet, etc. Yet, similar to any large-scaledeployment of sensor networks, the majority of the nodesin PLASMA consist of ordinary nodes. These nodes do nothave additional hardware, so they rely on location esti-mates. Recall that, in practical applications, the actual loca-tions of these nodes would not be known at the datacollection point. As a result, one will have to depend onthe location estimations reported by the nodes.
We observed that previous localization algorithms thatrely on lateration can yield quite unrealistic views of theactual deployment. For instance, even though some nodelocations could be estimated with 100% accuracy, strik-ingly conflicting estimates are made for some other nodes’location even for immediate neighbours. As demonstratedin Figs. 9 and 10 the overall topology can look significantlydifferent than what one would expect with the knowledgeof the actual topology.
Above all, for large-scale deployments, it is of extremeimportance to trade-off between the accuracy of estima-tions and the associated costs. Obviously, errors are inevi-table while producing estimates. For large-scaledeployments, it is, therefore, of extreme importance to in-form the user about the level of uncertainty, if any, to re-flect the possible errors being made using the estimates.This is especially important in cases where the estimatesare produced with a low confidence level. Based on ourobservation, we were motivated to develop an alternativelocalization approach that can provide a more representa-tive overall topology with confidence indicators.
In the following, we assume that nodes are using an or-ganized scheduling based on self-organization in the field[5]. Therefore, all messages are successfully received atnodes simplifying our discussion.
3 In theory two landmarks would be sufficient for a cluster with anappropriate alignment. However, due to irregularities in the field werequire the additional landmark to ensure an alignment for comparable X-and Y-coordinates.
4 The main objective if to single out landmarks that will help inestimating the relative location. If equidistance, it is simply ignored forvoting purposes.
3. QUAD localization algorithm
Our proposed algorithm, QUADrant based localization(QUAD), relies on an intuitive comparison between the rel-ative distances to known landmark locations. This compar-ison allows nodes to figure out the quadrant, i.e., North/South/East, etc. in reference to the landmarks.
QUAD can be summarized in three phases for ease ofpresentation: (1) hop distance dissemination, (2) locationvote generation, and (3) location estimation as follows:
(1) Hop distance dissemination: This first phase is thesame as the first phase of any algorithm that uses hop dis-tance for estimations, e.g., DV-Hop, Min–Max and Smooth.In particular, a landmark i will flood the network with itslocation. Each node will transmit the message (Xi, Yi,hop_count) to its neighbours; where (Xi,Yi), is the coordi-nate for the landmark i, and the hop_count is number ofhops between the landmark ad the receiving node, initiallyset to 0. The hop_count is then incremented at each nodethat forwards this message. Only messages with smallerhop_counts than those already transmitted are forwarded.Each node records the minimum hop count to each land-mark among the received messages. The hop counts are thenconverted to actual distances according to the radio range.
(2) Location vote generation: In this phase, each nodecompares its hop count to each landmark. If the node is
equidistant to all landmarks, it does not generate any voteduring this phase. Otherwise, it compares its distance tothe landmarks to determine its relative location in compar-ison to the landmarks. Note that for our algorithm we re-quire landmarks to be deployed in clusters, e.g., clustersof three3 nodes. Such a deployment can be easily achievedby tying three landmarks with ropes/rods or installing themon a common board.
Each node first categorizes the landmarks as the near,and far landmarks based on their relative hop distance.First, the minimum and the maximum hop distances areused to identify the nearest and the l furthest landmarks.These nodes are then placed in the near and far sets,respectively. Then, if a landmark’s hop count is closer tothe nearest, it is added to the near set; and if it is closerto the furthest, it is added to the far set.4 For instance, if anode is 1, 3, and 4 hops away from the landmarks A1, A2,and A3, respectively, then A1 is put in the near set, and A3
and A2 are recorded in the far set. Nodes that cannot be cat-egorized in either set are left out. For instance, if a node is 1,2, and 3 hops away from the landmarks A1, A2, and A3,respectively, then A1 is put in the near set, and A3 is recordedin the far set. A2 is not included in either the near or the farsets as it is 1 hop further/closer to both A1 and A3,respectively.
The main idea behind this categorization is to deter-mine the relative location a node is residing in. Each mem-ber in the near set is compared to each member in the farset to produce a negative/positive/middle vote on each x-and y-coordinate as described in Fig. 3. For instance, ifthe node is closer to a landmark that has a smaller x-coor-dinate, it is concluded that it resides somewhere East of thelandmarks. In particular, we apply the decision criteria asdemonstrated in Fig. 3.
The same decision criteria are also applied to y-coordi-nates where each occurrence of East is replaced by Southand each occurrence of West by North. The combinationof x- and y-coordinate votes determine the quadrant a sen-sor node resides in. For instance, North and East votes sug-gest the NorthEast quadrant in reference to the landmarkcluster. The combination of coordinate location votes helpproduce estimations as will be explained in the next phase.
Fig. 4 plots an example topology with a landmark clus-ter of three nodes at (50,50), (49,49), and (50,48), respec-tively. In this example the landmarks are represented bydark circles, and the ordinary nodes are represented withlight coloured circles. The actual coordinate of each nodeis as reported below the node. The radio range of each nodeis 1 unit such that neighbours can communicate with di-rect East, West, North, or South neighbours. Note that wemake use of a perfect grid structure to help motivate ourapproach. In the experiments we study configurations withnon-uniform settings for performance evaluation. In prac-

(50,50)
(51,49) (49,49)
.
.
. Hop-counts to: A B C D E
(49,49): 98 3 3 3 2(50,48): 98 5 5 3 2(50,50): 100 5 3 1 2
B
` A
D (50,51)
(50,48)
(46,49)
(0, 0)
E
. .
(48,51) C
Fig. 4. Example topology with a radio range of 1 unit such that each nodecan communicate with direct East/West/North/South neighbour. Node Dis 3 hops away from the landmark at (50,50), and the marked region plotspossible estimations for node D.
Fig. 3. Pseudo code for determining the quadrant that will help estimatethe X-coordinate of a sensor node in comparison to the landmarkscategorized in the near and far sets.
M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979 1971
tice, we expect some additional error due to irregularitiesof deployment in the field.
In the example given in Fig. 4, node A categorizes thelandmark at (50,50) as the far and the landmarks at(49,49) and (50,48) as the near landmarks. The x-coordi-nate of the furthest landmark (50) is larger than or equalto that of the nearest landmarks located at (49,50). There-fore node A will have a West vote for the x-coordinate and aSouth vote for the y-coordinate considering the y-coordi-nates of the landmarks.
In the example, node B will produce a Middle vote forthe y-coordinate and a West vote for the x-coordinate.Node C will produce a NorthWest vote. Node D will produce
a NorthEast vote. In this example node E cannot produceany vote during this stage as it is equidistant to all threelandmarks. Please see [26] for further explanation.
The coordinates can then be estimated with the help ofneighbour votes as described in the next phase. To motivatethe process consider the following observation. For instance,in Fig. 4, node C will produce a NorthWest vote and it is 3hops away from the landmarks at (50,50) and (49,49) so itcannot have an x-coordinate less than 47 or a y-coordinategreater than 52. At this point, node C can be concluded tobe somewhere in the intersection of the marked boundingboxes shown in the NorthWest quadrant. Note that we areimplicitly using some approximations with this boundingbox. In practice, for instance, in practice, it is not possiblethat the node resides at corners, say location (47,52), sincethe hop distance to landmarks would then be more than 3.Such approximations, however, help us reduce thecomplexity of calculations in comparison to earlier workas demonstrated in the Appendix. In the following, wepresent our approximation for estimations.
Before we proceed please note that, in this example,node E did not produce any vote during this stage as it isequidistant to all three landmarks. In the following wepresent how neighbour votes are exploited in these cases,as well.
(3) Location estimation: After the nodes determine theirlocation votes, they announce their vote to their immedi-ate neighbours using a single transmission. After this,every node is ready to produce a coordinate estimate.The estimation process is as follows.
If a node has produced a Middle vote, its coordinate forwhich it has produced this vote is estimated to be in be-tween those of the landmarks. For instance, in the previousexample if node B has produced a Middle vote on the Ycoordinate, its coordinate is approximated to be midpointof the highest and lowest Y coordinates of the landmarks,namely 49. We give the highest level of confidence to suchestimations, 0.95. Nodes that produce Middle votes allowneighbours to discover that they are close to the intersec-tion point of quadrants. This helps them produce accuratecoordinate estimates that help maintain their relative loca-tion in the deployment field.
In case of a middle vote, we assign the other coordinateusing a stretch factor explained as follow: a sensor nodethat is estimated to be D units away from a landmark at(X,Y) can be residing anywhere in the bounding box thatstretches at most D units on either coordinate. Let us as-sume that the node’s actual location is (X1,Y1) somewherein the NorthWest of the landmark. The border of thebounding box suggests that X1 is somewherebetween [X � D,X] on the x-coordinate. Since, it is not pos-sible that
X1 ¼ X � D ð4Þ
and
Y1 ¼ Y þ D ð5Þ
at the same time, as an approximation, the sum of the dis-tances from each coordinate can be at most D. If the nodehas a middle vote on one coordinate, than the estimate on

1972 M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979
this coordinate will stretch to the furthest point on thisaxis, e.g., closer to X � D.
In the example demonstrated in Fig. 4, the x-coordinatefor node B itself can be determined as follows. Node B is 3hops away from the nearest landmark which is at (49,49).Since the Y direction distance is 0 (49 versus 49 as esti-mated) it should have a 3 unit less X-coordinate than thislandmark (49 � 3 = 46). As a result, node B will produce acoordinate estimate of (46,49) with the highest confidencethat will allow neighbours to adjust their coordinatesaccordingly.
Nodes that hear conflicting votes on a particular coordi-nate similarly adjust their estimates. For instance, in theprevious example node D will hear from both East andWest neighbours indicating that it is close to the borderlinebetween East and West for the x-coordinate. This informa-tion is exploited to determine the other coordinate similarto the above case. Nodes that produce their estimates usingsuch information similarly set the other coordinate to pro-vide the distance that will sum up to the distance estimatefrom the nearest landmark. These estimates are given thenext highest confidence. These nodes, similar to the nodeswith Middle votes propagate their observation in the net-work to improve the neighbours’ estimates.
Other nodes apply the following approximations todetermine the lower and upper bounds on each coordinateto determine the range of possible estimates. For instance,for x-coordinate, the lower bound LB(x) and the upperbound UB(x) are as follows:
LBðxÞ ¼ Nx
Nx þMx þ Pxðxi � h�i rÞ þ Mx þ Px
Nx þMx þ Pxxi; ð6Þ
UBðxÞ ¼ Nx þMx
Nx þMx þ Pxxi þ
Px
Nx þMx þ Pxðxi þ h�i rÞ; ð7Þ
where xi represents the x-coordinate of the nearest land-mark, hi stands for the hop distance to this landmark, rstands for the radio range,5 and Ex, Mx, and Wx stands forthe number of East, Middle, and West votes for the x-coordi-nate, respectively. The lower and upper bounds on the y-coordinate are also determined using the same equationswhere each instance of ‘‘x” is replaced by ‘‘y”, East by South,and West by North.
Nodes that have clear South/East/North/West voteswithin the neighbourhood rely on the upper and lowerbounds for making estimates. A particular coordinate esti-mate is said to be the average of the corresponding upperbound and the lower bound. The confidence level in thiscase is stated to be inversely proportional to the distancefrom the landmarks, namely hi. Nodes closer to the land-marks have higher confidence levels in comparison tothose further away.
At the end of this phase nodes adjust their own esti-mates using weighted average of neighbour estimates.For instance, nodes that have produced their estimatesusing Middle votes will have a weight factor of 0.95. Thosethat have produced their estimates based on both East/
5 For simplicity we assume that the radio range is uniform and known,similar to the Smooth algorithm. Without any loss of generality, theconversion can be adapted according to the hop distance estimategenerated by the landmarks.
West or South/North votes will have a weight factor of0.90. All other nodes will have a weight factor of 1/hi. Notethat it is possible to continue refining the estimates to im-prove estimates further.
Note that our solution is based on the assumption thatthe node positions are static throughout the operations. Inpractice, it is likely that nodes would be relocated due towind, rain, or other forces of nature. For this reason, aswould be required for any localization algorithm, succes-sive flooding from landmarks might be required to main-tain accurate estimates.
4. Performance evaluation
To evaluate the performance of QUAD, we have imple-mented a simulator using C++. Note that there are numer-ous approaches in localization techniques in the literature[13,14,23]. A significant number of approaches are basedon signal strength, such as [9,21]. Signal strength informa-tion in theory allows accurate hop distance measurementsin between nodes. However, distance estimates based onsignal strength are shown to suffer complications in prac-tice [22,27]. Divide and conquer algorithms [1,8] selectsubsections in the field and combine the maximum likeli-hood estimates using possibly overlapping subsections ofthe measurement data vector. For this class of algorithms,the Fisher information matrix needs to be sufficiently large[1]. One of our objectives, on the other hand, is to reducethe number of landmarks deployed in the field for morecost-efficient solutions. We therefore do not include thisclass of algorithms in our evaluation.
We focus our study around approaches that merely relyon radio communications. In this study we do not assumesynchronized clocks and therefore we do not include algo-rithms that rely on accurate timing information.
In our study, we compared QUAD with well-knownlocalization algorithms, DV-Hop, Min/Max, and Smoothfor a wide range of scenarios. In each setting we feed thesimulator with an arbitrary topology and obtain the loca-tion estimates of each sensor node based on the localiza-tion algorithm. The distances are added along theshortest path between the landmarks and the nodes. Thesedistances are then fed to lateration to produce estimates.
For DV-Hop implementation, we record the minimumhop distances between the landmarks and the nodes. Thedistances are then improved assuming global topologyinformation before lateration. Min/Max is an approxima-tion to DV-Hop to reduce the complexity of laterationoperations. In this case, instead of circles around land-marks approximated squares are assumed. The intersec-tion of these squares helps determine the locationestimation of each node. Finally, Smooth provides animprovement for distance estimates used in DV-Hop. Inthis case, neighbours exchange their distance estimatesto improve their estimates before applying lateration.
The main performance metric we have applied is theaccuracy of estimates in isolation and in relation to eachother. Error in the estimates is traditionally measured asthe Euclidean distance between the real coordinate andthe estimated coordinate of a sensor node as

0
10
20
30
40
50
60
70
80
90
100
0200040006000800010000# of Connected Nodes
Ave
rage
Euc
lidea
n Er
ror
DV-Hop LaterationDV-Hop Min-MaxSmooth LaterationQUAD 0QUAD 1QUAD 2QUAD 5
(a) Using the traditional error metric QUAD’s performance is the best throughout the whole range.
0
2000000
4000000
6000000
8000000
10000000
12000000
10000 7500 5000 2500 1500# of connected nodes
over
head
DV-Hop LaterationDV-Hop Min-MaxSmooth LaterationQUAD 0QUAD 1QUAD 2QUAD 5
(b) The overhead of algorithms: QUAD 0 has the lowest
M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979 1973
Euclidean Error ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxe � xrÞ2 þ ðye � yrÞ
2q
; ð8Þ
where (xe, ye) is the estimated location of a node and itsreal location is (xr, yr). Note that this metric would not dif-ferentiate between the two estimates shown in Fig. 1. Forthis reason, we also try an alternative location error metricto reflect the overall topology constructed by individualestimates.
For the network topology, we made use of a perfect gridwhere a node is placed at each integer coordinate and thengradually reduced the number of nodes from this perfectsetting to achieve more representative randomized topolo-gies. We repeated the experiments with different randomnumber generator seeds such that we end up with differ-ent topologies each time. In our experiments, we used adefault radio range of 5 units. This setting allows a highernumber of connected topologies for sparse networks. Wethen study the sensitivity to varying communicationranges. In the experiments, we simplify the communica-tion model assuming no message loss or corruption. Inpractice the communication model should be enhancedusing organized scheduling [6].
In the following subsections we provide representativeresults from our performance evaluation study. We beginour analysis by evaluating the distances between the ac-tual and the estimated locations in isolation to the rest ofthe network. This allows us to compare the performancesof algorithms in the traditional approach. We then analyzethe resulting topologies in detail and point out the prob-lems with this traditional metric. Based on our observa-tions we further study the performance of thealgorithms. Finally we present our sensitivity analysis.
cost among its other versions.
Fig. 5. Performance based on error and costs.
4.1. Traditional metric: estimation accuracyIn the first experiment, we exploit three landmarks at(50,50), (49,49), and (50,48) in a 100 � 100 grid. We thenstudy different network densities. At 100% density, we de-ploy a sensor at each point in the grid such that all neigh-bours are equidistant to each other. This highly unrealistictopology is used as a basis for comparison. We then grad-ually delete sensors in this grid ensuring that all remainingnodes form a connected network. At each setting we runeach algorithm from scratch to evaluate the performancein comparison to each other.
In our experiments, as we use lower density deploy-ments we face unisotropic deployments [11] to stress testour algorithm. In the following, we present sample resultsobtained using a wide range of workloads. In our initialexperiments we use the traditional performance metricbased on the Euclidean distance between the actual andthe estimated location of the nodes. Note that our mainobjective is to observe how close we can get to the actualdeployment topology. For this reason, we perform moredetailed analysis in the following subsections.
In Fig. 5a we plot the average Euclidean error of differ-ent topologies as the number of nodes in the network de-creases. We allowed up to 5 refinements (QUAD 5) toanalyze its behaviour. The first data point in Fig. 5a pre-sents an unrealistically dense and uniform topology. At
this highly unlikely setting, we have a sensor node at everypoint in the grid. Beyond this unrealistic point, we observeQUAD to provide the best performance by a significant fac-tor. We observe that even though beneficial for high densi-ties extra refinements are not beneficial at low densities.This is due to the fact that for low density deploymentsneighbour information might not be as informative. In fact,we observe this behaviour with Smooth as well. As wemove to more realistic, i.e., non-uniform, topologies withlower densities, Smooth, which had a reasonableperformance in the estimates for the first data point, isout-performed by more and more other algorithms. This isdue to the fact that Smooth depends on the density in thenetwork to improve the hop distance before applying later-ation. In low densities, the neighbours are not uniformlydistributed around a node, and the targeted improvement,on the contrary, can be detrimental to the performance.With QUAD, however, we observe that even with such pen-alty the overall performance is still significantly better thanalternatives. Recall that when nodes do not have a sufficientnumber of neighbours Smooth performs worse thanDV-Hop or any other algorithm. Note that in the graph, wedid not plot errors larger than the dimension of the area inorder to provide a more readable illustration.

1974 M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979
QUAD, on the other hand, is quite robust to changes inthe topology because it relies on relative location informa-tion with representative confidence levels. At this settingthe only competitive algorithms to QUAD are DV-Hopand Smooth at the lowest and the highest density cases,respectively. In between the lowest and the highest den-sity settings, QUAD drastically outperforms all algorithms.For instance, at 50% density in Fig. 4, DV-Hop produces330% and Smooth 490% higher error than QUAD.
We then considered the complexity of each algorithmto achieve the demonstrated performance. We analyze costin terms of (1) communication costs, and (2) computa-tional costs. When we consider the communication cost,flooding is observed to be the dominant power consump-tion factor in sensor nodes. In Fig. 5b we plot the numberof message exchanges for different number of sensors.
We observed that each refinement results in additionalcommunication as expected. Yet, refinements are amongneighbours and therefore are of limited impact in compar-ison to flooding. Within the whole range DV-Hop laterationor Min/Max has the best performance in terms of commu-nication costs as they required no additional messaging be-yond flooding. Smooth due to its message exchanges toimprove hop counts results in the highest cost. AmongQUAD versions, as expected QUAD 0 is the most efficientone. Computational costs, though showed more variation,are mostly negligible when compared to the overall powerconsumption that considers communications. In particular,DV-Hop Min/Max is the most efficient algorithm among allwith only 9 arithmetic operations with only a single divi-sion, which is by 2, and can be implemented by a shiftoperation. DV-Hop lateration requires at least 28 arithme-tic operations of which most are the costlier multiplicationand division operations. As demonstrated in the A, latera-tion requires a significant number of operations to be ap-plied at individual nodes. Refinement operations impactthe costs as expected. Overall, though the differences be-tween the overheads as plotted in Fig. 5b suggest thatQUAD provides a reasonable trade-off between the estima-tion accuracy and the associated costs.
We were not satisfied with these promising results ob-tained by the traditional performance metric since ourmain motivation is to capture a representative topologybased on the individual location estimates. We take a clo-ser look at the performance of the algorithms in the follow-ing subsections.
Overall, we conclude this subsection with the followingobservation. Throughout the whole region, QUAD providesthe best performance using the traditional metric that con-siders each estimate independently from each other.Refinements improve the performance further for highdensity deployments.
Fig. 6. Smooth’s location estimates connected to actual neighbour’sestimates: If estimates are perfectly accurate, there should be no longedges, especially those crossing over quadrants.
4.2. Need for a new accuracy metric
In the previous subsection, we relied on the traditionalmetric, the Euclidean distance, to measure the error madein the estimations. Even with this traditional metric ofindividual estimates, we observe QUAD to provide animpressive performance. In this subsection, however, we
discuss the need for a new metric that considers the overalltopology rather than the individual estimates.
In the previous section, we have represented the perfor-mance of alternative approaches on a complex overalltopology using a simple numeric metric. To provide a bet-ter understanding of the performance of the algorithms,we analyzed the estimates made for each node. For thispurpose, a simple illustration of the network with eachalgorithm’s estimation on a 2-dimensional area was notsufficient In other words, when we plot the location esti-mation of each sensor node, we loose the informationabout the relationship to their actual coordinates. For in-stance, it is not possible to evaluate a case where two esti-mates at, say (120,50) and (35,99), are actually immediateneighbours in the deployment topology (see Fig. 10)! Inour study we had a pressing need to represent the estima-tions in an informed manner (to map to corresponding ac-tual locations).
For this purpose we set forth with an illustration wherewe plot all estimated locations of the algorithm and con-nect each estimate to its actual closest neighbours(East/West/South/North node). In Fig. 6 we demonstratethe estimates of Smooth for 100% grid density representingan ideal homogeneous deployment of sensor nodes. If theestimates were perfect, we would expect to see a perfectsquare with equal length edges within the grid. As demon-strated in Fig. 6, Smooth’s estimates result in some imme-diate neighbours appear far away from each other due tothe produced estimates.
On the other hand in Fig. 7 we plot the estimates pro-duced by QUAD using five refinements. As can be seenimmediate neighbours are never located far away fromeach other such that the edges connecting estimate loca-tions have a limited length.
To enable a better understanding of the performance ofthe algorithms, we plot the estimates as a function of theiractual location. This allows us to observe the distribution

Fig. 7. QUAD’s location estimates connected to actual neighbour’sestimates: We do not observe long edges suggesting that neighboursare not estimated to be unreasonably far away.
Fig. 9. X-coordinate estimates using Min–Max: the overall topology iscompletely misleading.
Fig. 10. X-coordinate estimates using DV-Hop: estimates are all aroundresulting in highly conflicting estimates even for immediate neighbours.
M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979 1975
of the error in produced estimates. For ease of illustrationwe plot the x- and y-coordinates separately to avoid anunreadable 4 dimensional representation.
Fig. 8 depicts the actual x-coordinates of each sensornode in the field. In other words, we plot the x-coordinateof the node located at (0,0) at location (0,0). The x-axis rep-resents the x-coordinate, and the y-axis represents they-coordinate of the 10,000 sensor nodes to provide acomparison framework for Figs. 9–11. Since all nodes havethe exact x-coordinate the resulting 3-dimensionalillustration appears to be a smooth surface with a 45�inclination. The y-coordinates are the same as the sideview of this graph.
Ideally, we expect the estimated coordinates to closelymatch these actual coordinates demonstrated in Fig. 8. In
Fig. 8. Ideal X-coordinates: if estimates are perfectly accurate, the graphshould look like this.
113 25 37 49 61 73 85 97
S1
S33S65
S97
0102030405060708090
100
Estim
ate
X-C
oord
inat
e
X
Y
90-10080-9070-8060-7050-6040-5030-4020-3010-200-10
Fig. 11. X-coordinate estimates using QUAD: Estimates are all aroundresulting in highly conflicting estimates even for immediate neighbours.

1976 M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979
other words, we expect the estimates to form a 45� tiltedplane such that the relative location of each node is accu-rate. In the rest of the discussion, we study estimationalgorithms in comparison to this ideal plane.
In Fig. 9 we plot the x-coordinate estimates made byMin–Max. In this setting, Min–Max estimates all nodes tobe more or less at the same coordinate, in particulararound the average x-coordinates within the whole field.The y-coordinate estimates are similar to its x-coordinateestimates. Recall that in Fig. 5 we have observed Min–Max to provide a reasonable performance in comparisonto others using the traditional metric. Using such Euclideandistance error metric we are not able to observe the rela-tive topology created by individual estimates.
As demonstrated in this plot, we observe a significantlydifferent overall topology than the actual one shown inFig. 8. Therefore it is not possible to differentiate between,say even the two furthest corner nodes at SouthEast andNorthWest, when they report an observation.
Fig. 12. There is no specific pattern for distance errors made by Smooth.
An algorithm that produces more or less the sameestimate for every sensor node location in the field ap-pears to be reasonable using the traditional accuracymetric. This result, by itself, suggests that the Euclideandistance metric, as has been used in previous studies, isnot a representative metric to evaluate location estima-tion algorithms. The main problem with this metric is thatit does not reflect the relative location errors that are verycritical for data management.
Fig. 10 plots the estimates made by DV-Hop. As demon-strated in the figure the estimates are far from being repre-sentative as the values are either overestimated orunderestimated without a specific pattern. Even immedi-ate neighbours have highly conflicting estimates in thiscase. DV-Hop’s irregularities (neighbour node estimatesjumping up and down) and sometimes producing the sameestimates for symmetric locations makes it impossible todifferentiate between immediate neighbours and far awaypoints. In Fig. 11 we plot the x-coordinate estimates gener-ated by QUAD. As demonstrated the estimates are muchcloser to the actual ones. After the refinements appliedusing neighbour estimates QUAD’s topology gets closer tothe ideal plane.
Fig. 13. DV-Hop estimates deteriorate for nodes further away fromlandmarks.
4.3. Sensitivity to distance from the landmarks
Obviously as the network size gets larger the estimatesof nodes further away from the landmarks are expected todeteriorate. For QUAD the nodes at the boundary of quad-rants, on the other hand, provide a reference point that canbe used by other nodes regardless of the distance from thelandmarks. This is a major advantage for deployment ofQUAD for large-scale deployment. In this section, we dem-onstrate the benefits of having a regular error pattern inthe deployment field. For this purpose we measure the ac-tual distance from the center of landmarks to each node.
We then compare this to the distance between the esti-mated location and the center of landmarks.
In Fig. 12, we plot the error difference for the estimatesgenerated by Smooth at its best performance, namely 100%perfect grid deployment. In the figure, we see that the esti-mated coordinate is either an underestimation or an over-estimation of the actual values, i.e., we have both positiveand negative values in the graph. We have also repeatedthe experiment with larger topologies and observed the er-ror difference of Smooth increase at a factor of the areagrowth for all nodes.
In Fig. 13 we plot the error difference for DV-Hop later-ation. As demonstrated the nodes that employ DV-Hoplateration always underestimate their locations. However,as plotted in Fig. 13, its error ranges are much higher thanthose of Smooth. We observe a bowl like shape, which sug-gests that the difference is increasing, as the node is placedfurther away from the anchor nodes.
The error differences for QUAD, as demonstrated inFig. 14 are always an underestimation of the actual values,

111 21 31 41 51 61 71 81 91
101
S1
S29S57
S85
0
10
20
30
40
50
60
70
80
Dis
tanc
e
X
Y
70-8060-7050-6040-5030-4020-3010-200-10
Fig. 14. QUAD estimates have nodes close to borders produce low errorestimates regardless of the distance from the landmarks.
-2.00E+09
0.00E+00
2.00E+09
4.00E+09
6.00E+09
8.00E+09
1.00E+10
1.20E+10
1.40E+10
0 10 20 30 40 50
Avg. # of Neighbors
Rel
ativ
e Es
timat
e Er
ror
DV-DistanceDV-Hop LaterationDV-Hop Min-MaxSmooth LaterationQuad
Fig. 15. Relative coordinate error: as the average number of neighboursthat a node can communicate using a single transmission increase QUADoutperforms even the closest competition.
M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979 1977
i.e., the difference is always positive. We see that at border-lines and at diagonals, the errors are negligible. In addition,the error difference of QUAD is the same for specific pointsin the topology when we experiment with a larger numberof nodes and a larger deployment area. This helps provide areliable confidence levels in the estimates without requir-ing individual nodes being aware of the complete networktopology.
4.4. Sensitivity to neighbour communication
Obviously the distribution of nodes in the network andthe network density factors in when producing locationestimations. In this section, we evaluate the sensitivity ofthe algorithms to the neighbour density using relativeestimation error. In particular, we compare the estimatesof each pair of nodes in the network. If a particular node’sestimate is erroneous in comparison to its neighbours’ esti-mate based on the actual location information, we recordthe deviation between the x- and y-coordinate distance.For instance, for node i that is actually located at (xi, yi) thathas a location estimate of xi0 ; yi0 Þ and node j in the networkthat is actually located at (xj, yj) that has a location esti-mate of ðxj0 ; yj0 Þ first the x-coordinates location in actuallocations is noted, e.g., ‘‘xj is greater than xj”. If the esti-mates of the x-coordinates do not follow this relationship,e.g., ‘‘x0j is smaller than x0j” then the error on the x-coordi-nate is recorded as
Errorx ¼ jxi � x0ij þ jxj � x0jj: ð9Þ
If the estimates are in correct relation according to the actuallocations Errorx is taken to be 0. Similarly, for y-coordinates ifthere is a problem in relative location, the error is
Errory ¼ jyi � y0ij þ jyj � y0jj: ð10Þ
The error for each pair of nodes in the network is thenmeasured as
relativeError ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiError2
x þ Error2y
q: ð11Þ
Relative estimation error is the total deviation in all suchdistances. Note that we prefer this approach to using lineardistances between the actual and estimates locations, sincethe angle between the two would not be reflected in the la-ter case.
In Fig. 15, we plot the relative estimation error as dis-cussed as the radio range is increased such that the averagenumber of one-hop neighbours increase. In the figure,QUAD provides the best performance across the wholerange. As the number of neighbours increase, the perfor-mance improves 2 orders of magnitude in comparison toSmooth and almost 3 orders of magnitude for DV-Hopand Min–Max.
Overall we experimented with different topologies andlandmark placements. We observed a promising potentialfor QUAD in various settings. It is also possible to increasethe number of landmarks for better accuracy and to adaptin between landmark estimations.
5. Conclusions
Previous work in localization algorithms focus on indi-vidual accuracy of sensor location estimates without con-sidering the relative location of nodes in comparison toeach other. Yet, such relative location defines the overalltopology of the sensor network as will be used for datamanagement. In this paper, we proposed a novel localiza-tion algorithm, QUAD, to produce a representative overalltopology based on the relative locations of landmarks tosensor nodes. QUAD only depends on already existingradio communications to produce high confidence esti-mates. Our performance evaluation results suggest 2-foldimprovements in the traditional estimate error metricsand orders of magnitude improvements considering rela-tive location of nodes.
Acknowledgement
This work is supported in-part by a research grant fromCENIC. The authors would like to thank the anonymous

Table 1Euclidean error using alternative localization approaches for node A ofFig. 3.
Algorithm Estimate coordinates Actual location Euclideandistance error
DV-Hop (0.5, �0.5) (0,0) 0.707Min–Max (49.5,48.5) 69.3Smooth (�47.83, �48.83) 68.35QUAD (0.335, �0.335) 0.47
6 It is possible to have different average hop distance for differentlandmarks since the hop distance between individual landmarks may varyaccording to the neighbours between them.
1978 M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979
reviewers for their helpful comments which have signifi-cantly improved the quality of the paper.
Appendix A. Use of lateration for location estimates
Lateration, or triangularization requires the knowledgeof the distance from three landmarks are used for latera-tion. For instance, for three landmarks the following threeequations are solved simultaneously:
ðx1 � xÞ2 þ ðy1 � yÞ2 ¼ d21; ð13Þ
ðx2 � xÞ2 þ ðy2 � yÞ2 ¼ d22; ð14Þ
ðx3 � xÞ2 þ ðy3 � yÞ2 ¼ d23; ð15Þ
where (xi, yi) are the coordinates of landmark i and di is theestimated distance from the landmark i. Note that theabove equations can be solved only if no conflicting infor-mation is given which is not possible to avoid in random adhoc topologies. Assuming that there is a solution, we cansubtract Eqs. (1) and (2) from (3) and obtain:
x21 � x2
3 � 2ðx1 � x3Þxþ y21 � y2
3 � 2ðy1 � y3Þy ¼ d21 � d2
3;
ð16Þ
x22 � x2
3 � 2ðx2 � x3Þxþ y22 � y2
3 � 2ðy2 � y3Þy ¼ d22 � d2
3:
ð17Þ
Next, we reorder these two equations such that
A ¼2ðx1 � x3Þ 2ðy1 � y3Þ2ðx2 � x3Þ 2ðy2 � y3Þ
" #; ð18Þ
b ¼x2
1 � x23 þ y2
1 � y23 þ d2
3 � d21
x22 � x2
3 þ y22 � y2
3 þ d23 � d2
2
" #; ð19Þ
x
y
" #¼ ðAT AÞ�1AT b: ð20Þ
Then, the coordinate values [x,y] are solved if the matrix in-verse can be computed. For instance, for a node that is 98,98, and 100 units away from three landmarks located at(49,49), (50,48), and (50,50), respectively, the estimatedlocation can be solved by plugging the respective values as
A ¼2 � ð49;50Þ 2 � ð49;50Þ2 � ð50;50Þ 2 � ð48;50Þ
� �¼�2 �20 �4
� �; ð21Þ
b ¼ 492 � 502 þ 492 � 502 þ 1002 � 982
502 � 502 þ 482 � 502 þ 1002 � 982
" #; ð22Þ
b ¼198200
� �:
In order to estimate the location, the node needs to solvefor
ðAT AÞ�1AT b ¼�0:5 0:25
0 �0:25
� �198200
� �;
ðAT AÞ�1AT b ¼�49�50
� �: ð23Þ
Hence, the estimated location of this sensor node is(�49, �50).
Table 1 demonstrates the estimates produced for vari-ous algorithms in this setting as described in the followingsections. Note that the overall performance of algorithms isbased on all estimates produced.
Appendix B. DV-Hop estimate
We repeat the example of the preceeding section usinga radio range of 1 unit. Assume that the landmark at(49,49) is 2 hops away from the landmarks at (50,48),and (50,50). Since the real (Euclidean) distance betweenthis landmark and the others is equal to the square rootof 2,
AverageHopDistance ¼ffiffiffi2pþ
ffiffiffi2p
4¼ 0:707 ð24Þ
Landmarks flood the network with their hop distance esti-mate. For the same example as in DV-Distance, the esti-mated distances of the landmarks nodes at (49,49),(50,48), and (50,50) would be 69.286, 69.286, and 70.7,respectively.6 A and AT are the same equation as (21), andEq. (22) will be updated with
b ¼ 492 � 502 þ 492 � 502 þ 70:72 � 69:2862
502 � 502 þ 482 � 502 þ 70:72 � 69:2862
" #; ð25Þ
b ¼02
� �;
ðAT AÞ�1AT b ¼0:5�0:5
� �:
Thus, the estimated location for this sensor node using DV-Hop is (0.5, �0.5).
Appendix C. Min–Max estimate
For the same example of sections A and B, the estimateddistances are 69.286, 69.286, and 70.7, respectively. Thenthe bounding boxes around the landmarks located at coor-dinates (x, y), represented by BB(x, y), can be representedby the minimum and the maximum coordinate corners as:
BB ð49;49Þ : ½�20:30;�20:30�x½118:30;118:30�; ð26ÞBB ð50;48Þ : ½�19:30;�21:30�x½119:30;117:30�; ð27ÞBB ð50;50Þ : ½�20:71;�20:71�x½120:71;120:71�: ð28Þ

M. Wong, D. Aksoy / Computer Networks 53 (2009) 1967–1979 1979
The center point for the intersection of these three bound-ing boxes is [49.5, 48.5]. Therefore, the estimate location ofthe sensor node is (49.5, 48.5).
Appendix D. Smooth estimate
For the same example as before assuming that the sen-sor node updates the hop counts to the landmarks at(49,49), (50,48), and (50,50) as 96.83, 96.83, and 98.83,respectively, the A matrix is same as [10], and the estimateis obtained solving (ATA)�1ATb for
b ¼ 492 � 502 þ 492 � 502 þ 98:832 � 96:832
502 � 502 þ 482 � 502 þ 98:832 � 96:832
" #;
b ¼193:32195:32
� �: ð29Þ
Then the estimated location of the node, when calculated,is (�47.83, �48.83).
References
[1] J.S. Abel, A divide and conquer approach to least squares estimation,IEEE Trans. Aerospace Elect. Syst. 26 (2) (1990) 423–427.
[2] D. Aksoy, PLASMA: A PLAnetary Scale Monitoring Architecture, in:ACM Multimedia, Singapore, 2005.
[3] D. Aksoy, Information source selection for resource constrainedenvironments, ACM SIGMOD Record 34 (4) (2005).
[4] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, A survey onsensor networks, IEEE Commun. Mag. (2002) 102–114.
[5] S. Balasubramanian, D. Aksoy, Adaptive energy-efficient registrationand online scheduling for wireless sensor networks, Comput.Networks 51 (12) (2007) 3427–3447.
[6] S. Balasubrahmanian, D. Aksoy, Energy-efficient channel allocationfor publish-subscribe based GeoSensor networks, in: A. Stephanidis,S. Nittel (Eds.), GeoSensor Networks, CRC Press, 2004.
[7] N. Bulusu, J. Heidemann, D. Estrin, GPS-less low-cost outdoorlocalization for very small devices, IEEE Personal Commun. 7 (5)(2000).
[8] M.W. Carter, H.J. Holly, S.S. Michael, Y. Yinyu, SpaseLoc: an adaptivesubproblem algorithm for scalable wireless sensor networklocalization, SIAM J. Optim. 17 (4) (2006) 102–1128.
[9] T. He, C. Huang, B.M. Blum, J.A. Stankovic, T. Abdelzaher, Range-freelocalization schemes for large scale sensor networks, Proc. NinthAnnual Int. Conf. Mobile Comput. Networking (2003) 81–93.
[10] L. Lazos, R. Poovendran, SeRLoc: secure range-independentlocalization for wireless sensor networks, Proc. ACM WorkshopWireless Security (2004).
[11] H. Lim, J. Hou, Localization for anisotropic sensor networks, IEEEINFOCOM (2005).
[12] Z. Li, W. Trappe, Y. Zhang, B. Nath, Robust statistical methods forsecuring wireless localization in sensor networks, in: Proc. IPSN,2005.
[13] Guoqiang Mao, Baris Fidan, Brian D.O. Anderson, Wireless sensornetwork localization techniques, Comput. Networks 51 (10) (2007)2529–2553.
[14] Guoqiang Mao, Baris Fidan, Localization algorithms and strategiesfor wireless sensor networks, IGI Global, in press. <http://www.igi-pub.com/>.
[15] D. Moore, J. Leonard, D. Rus, S. Teller, Robust distributed networklocalization with noisy range measurements, in: Proc. SenSys,Baltimore, MD, 2004.
[16] R. Nagpal, H. Shrobe, J. Bachrach, Organizing a global coordinatesystem from local information on an ad hoc sensor network, Proc.Second Int. Workshop Inform. Process. Sensor Networks (2003).
[17] D. Niculescu, B. Nath, Ad hoc location system (APS), Proc. IEEEGlobecom (2001).
[18] D. Niculescu, B. Nath, Error characteristics of ad hoc location systems(APS), Proc. ACM Int. Symp. Mobile Ad Hoc Networking Comp.(2004).
[19] N.B. Priyantha, A. Chakraborty, H. Balakrishnan, The cricket location-support system, Proc. ACM Int. Conf. Mobile Comput. Networking(2000).
[20] A. Savvides, H. Park, M.B. Srivastava, The n-Hop multilaterationprimitive for node localization problems, Mobile Networks Appl.(2003).
[21] M. Sichitiu, V. Ramadurai, Localization of wireless sensor networkswith a mobile beacon, in: Proc.MASS (2004).
[22] R. Stoleru, J.A. Stankovic, Probability grid: a location estimationscheme for wireless sensor networks, Proc. SECON (2004).
[23] Sridhar Tulabandula. Localization of wireless sensor networks usingmultidimensional scaling. Thesis of Sridhar Tulabandula, UMC,December 2007.
[24] R. Want, A. Hopper, V. Falcao, J. Gibbons, The active badge locationsystem, ACM Trans. Inform. Syst. 10 (1) (1992) 91–102.
[25] K. Whitehouse, C. Karlof, D. Culler, A practical evaluation of radiostrength for ranging-based localization, Proc. ACM Mobile Comput.Commun. Rev. (MC2R) (2006).
[26] M. Wong, D. Aksoy, J.A. Stankovic, Relative accuracy based locationestimation in wireless ad hoc sensor networks, Proc. IEEE ICC (2007).
[27] G. Zhou, T. He, S. Krishnamurthy, J.A. Stankovic, Impact of radioirregularity on wireless sensor networks, Proc. MobiSys, 2004.
May Wong has received her MS degree from the University of California,Davis. She is a control engineer at Intel corporation.
Demet Aksoy is a tenure track professor atthe University of California, Davis. Herresearch focuses on problems at the inter-section of wireless networking and distrib-uted information processing. She has receivedher Ph.D. from the University of Maryland,College Park.