Purpose of this Presentation Drivetrain Selection o Types of drivetrains o Types of wheels o...
25
1 Drivetrai ns
-
Upload
deirdre-kennedy -
Category
Documents
-
view
220 -
download
2
Transcript of Purpose of this Presentation Drivetrain Selection o Types of drivetrains o Types of wheels o...

1
Drivetrains Presented by: John & Paul Hines
Purpose of this Presentation
• Drivetrain SelectionoTypes of drivetrainsoTypes of wheelsoDrivetrain mechanicsoBest drivetrain for your teamoMaintenance
Ideal Drivetrain
• Gets your robot where it needs to be, when it needs to be there
• Is robust and reliable• Can push/pull objects and other robots• Meets your strategy goals • Fits with the game• Can be built with your resources • Rarely needs maintenance• Can be fixed quickly
Basics
• Know your resources• Decide after kickoff:• Speed, power, shifting, mobility• Use the most powerful motors on
drivetrain• Don’t drive ½ of your robot… WEIGH IT
DOWN!• Break it early• Give software team TIME to work• Give drivers TIME to drive
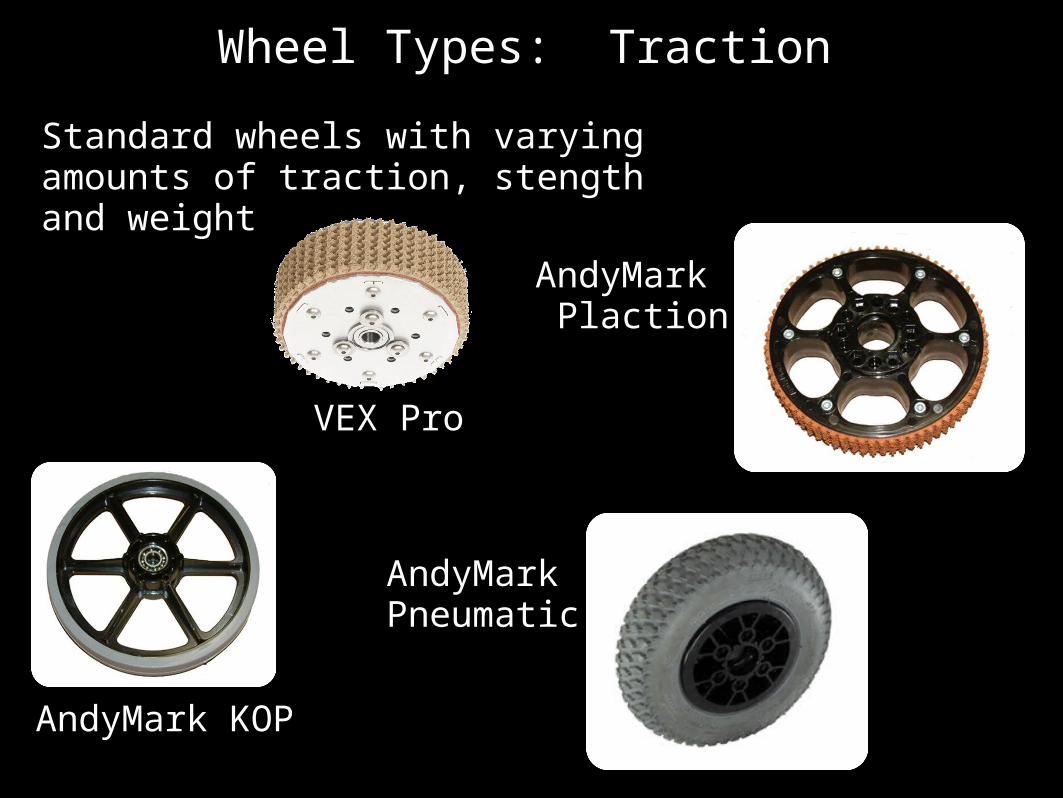
Wheel Types: Traction
Standard wheels with varying amounts of traction, stength and weight
AndyMark KOP
VEX Pro
AndyMark Plaction
AndyMark Pneumatic
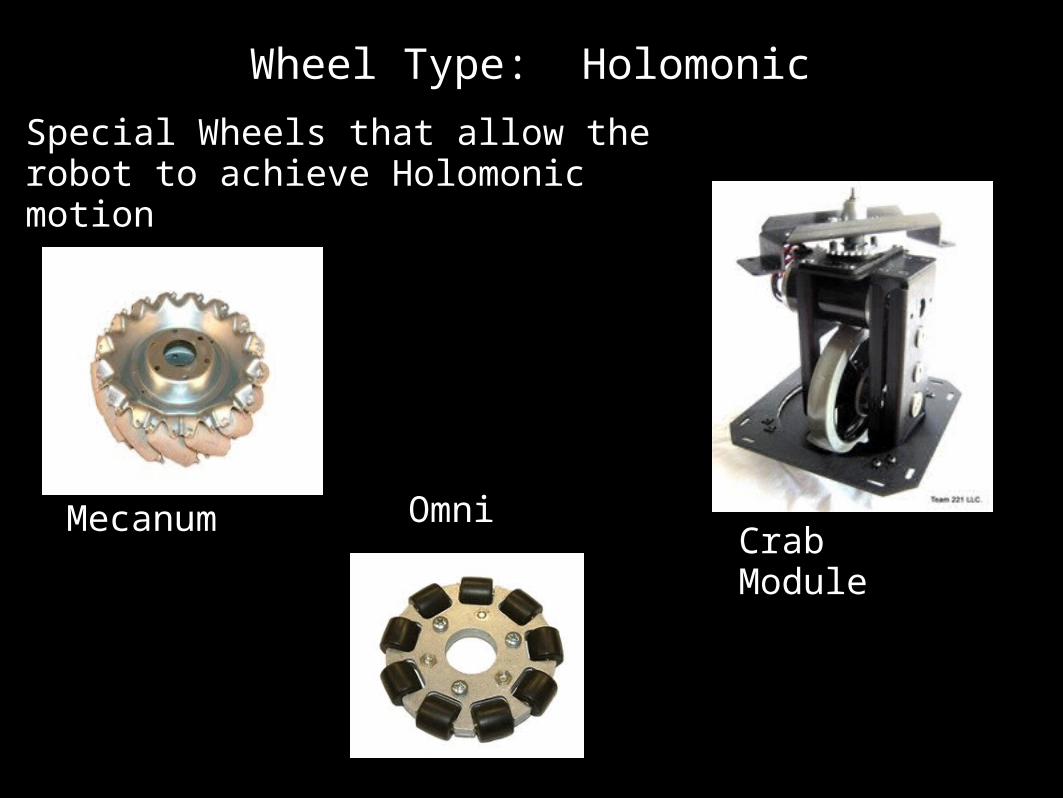
Wheel Type: Holomonic
Special Wheels that allow the robot to achieve Holomonic motion
Mecanum OmniCrab Module
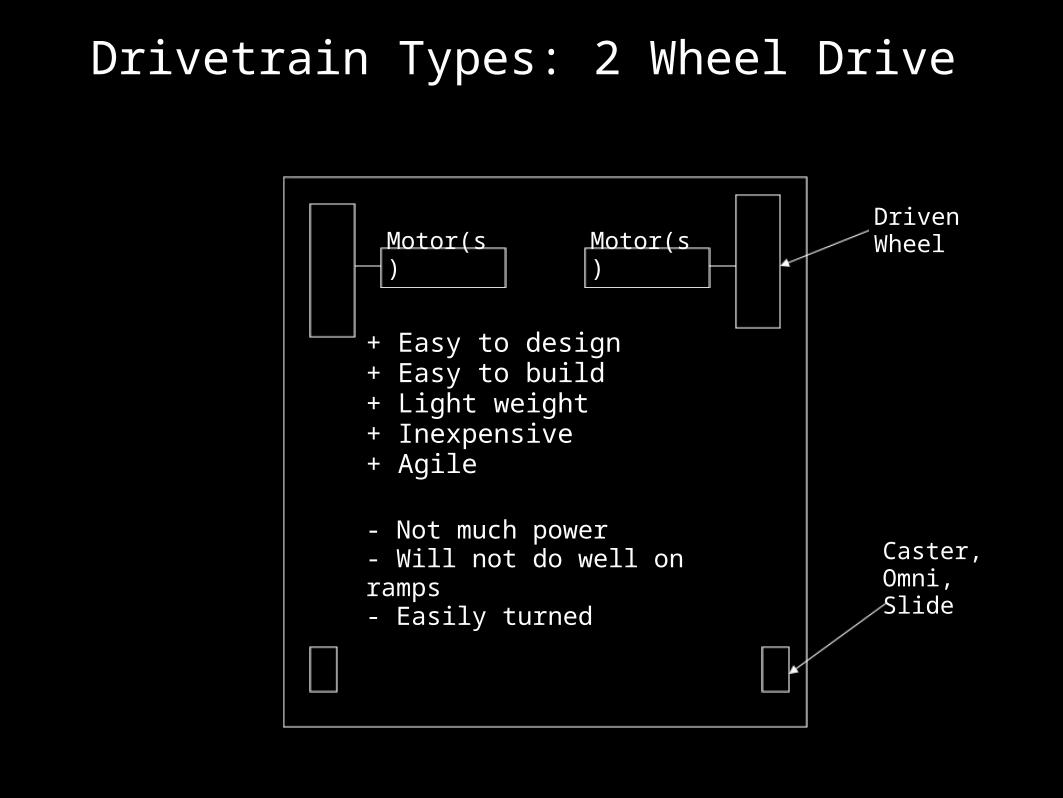
Caster,Omni,Slide
DrivenWheel
+ Easy to design+ Easy to build+ Light weight+ Inexpensive+ Agile
- Not much power- Will not do well on ramps - Easily turned
Motor(s)Motor(s)
Drivetrain Types: 2 Wheel Drive
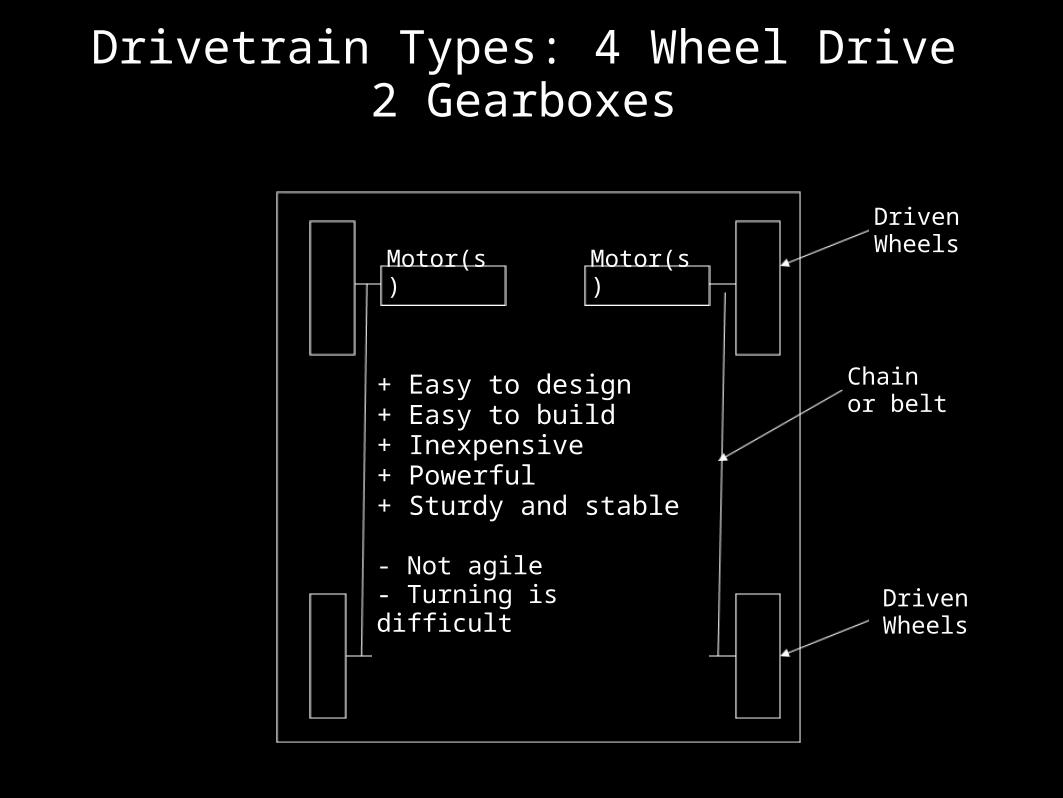
Chain or belt
DrivenWheels
+ Easy to design+ Easy to build+ Inexpensive+ Powerful+ Sturdy and stable
- Not agile- Turning is difficult
Motor(s)Motor(s)
DrivenWheels
Drivetrain Types: 4 Wheel Drive2 Gearboxes
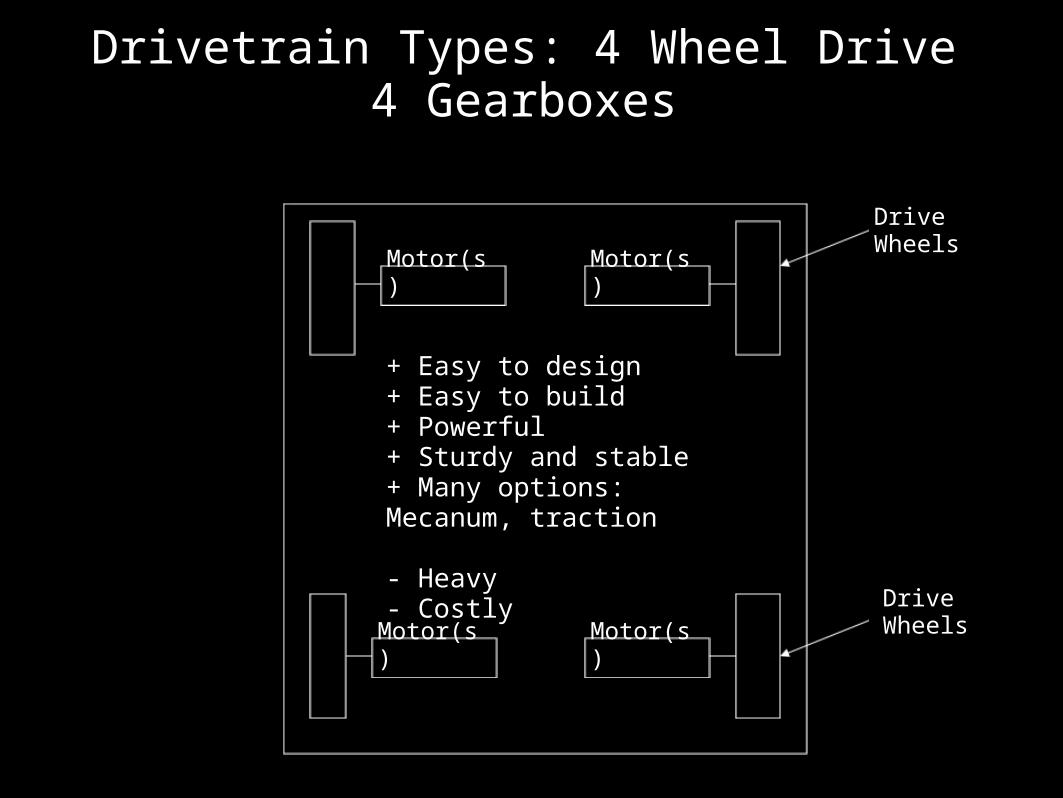
DriveWheels
+ Easy to design+ Easy to build+ Powerful+ Sturdy and stable+ Many options:Mecanum, traction
- Heavy- Costly
Motor(s)Motor(s)
DriveWheels
Motor(s) Motor(s)
Drivetrain Types: 4 Wheel Drive4 Gearboxes
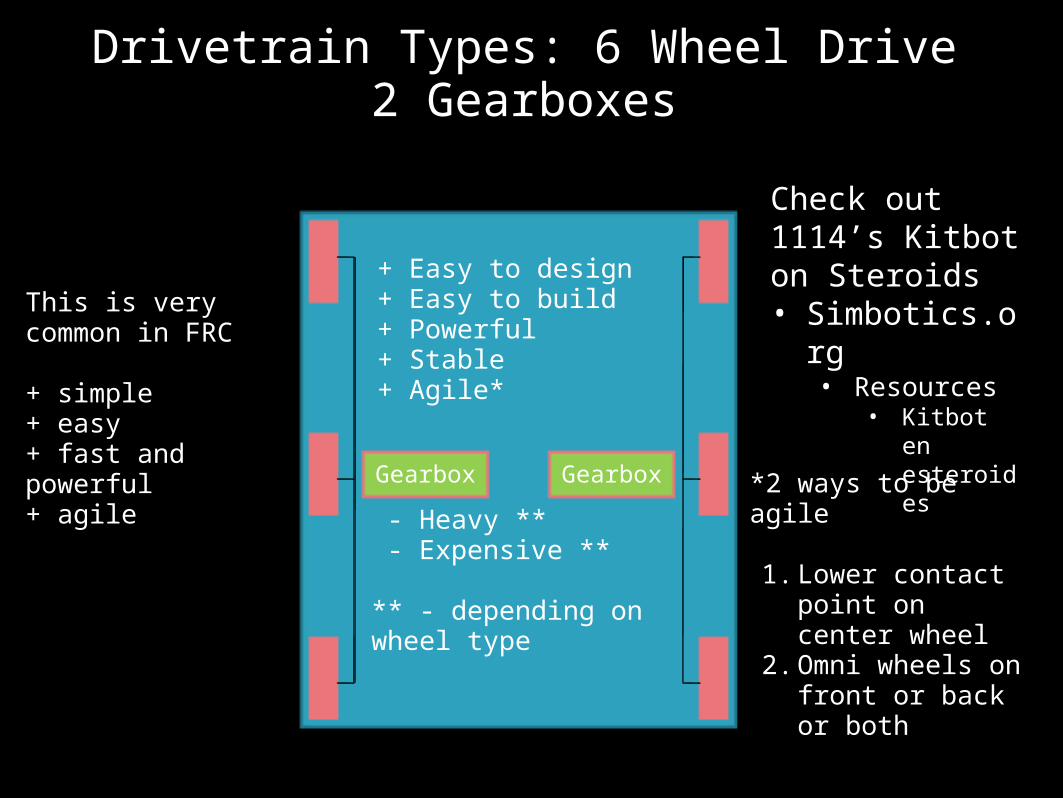
Gearbox Gearbox
+ Easy to design+ Easy to build+ Powerful+ Stable+ Agile*
- Heavy ** - Expensive **
** - depending on wheel type
*2 ways to be agile
1. Lower contact point on center wheel
2. Omni wheels on front or back or both
This is very common in FRC
+ simple+ easy+ fast and powerful+ agile
Drivetrain Types: 6 Wheel Drive2 Gearboxes
Check out 1114’s Kitbot on Steroids• Simbotics.org
• Resources• Kitbot en
esteroides
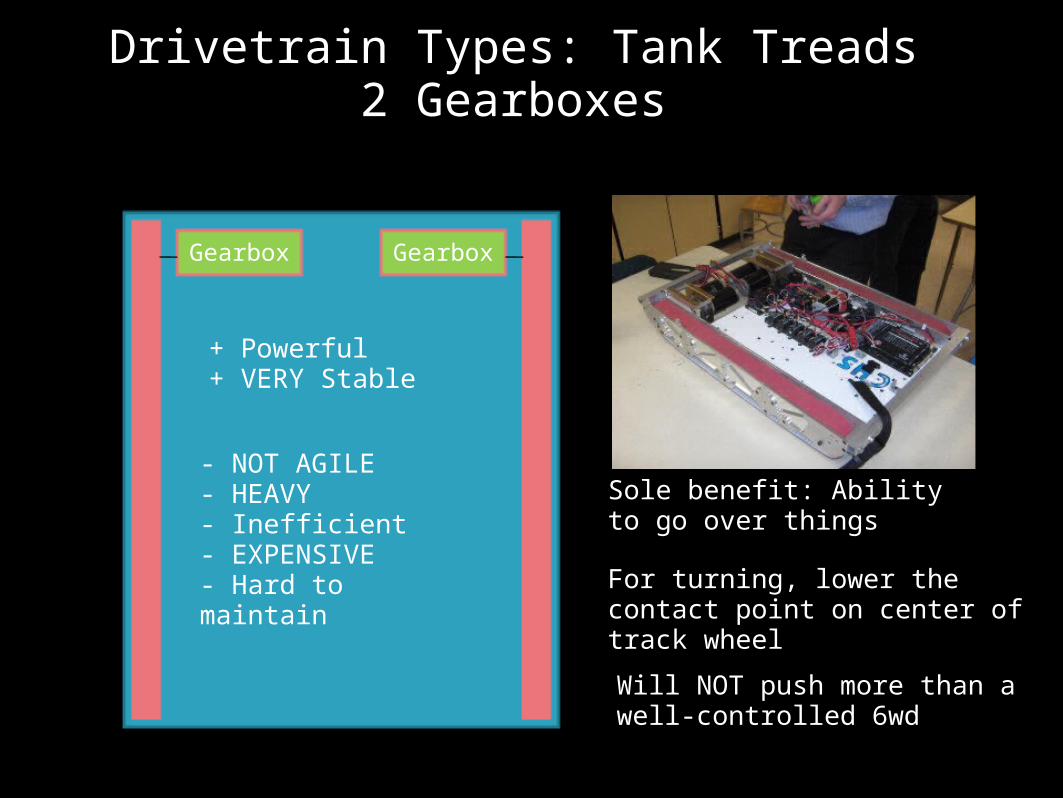
Gearbox Gearbox
+ Powerful+ VERY Stable
- NOT AGILE - HEAVY - Inefficient - EXPENSIVE - Hard to maintain For turning, lower the contact point
on center of track wheel
Sole benefit: Ability to go over things
Will NOT push more than a well-controlled 6wd
Drivetrain Types: Tank Treads2 Gearboxes
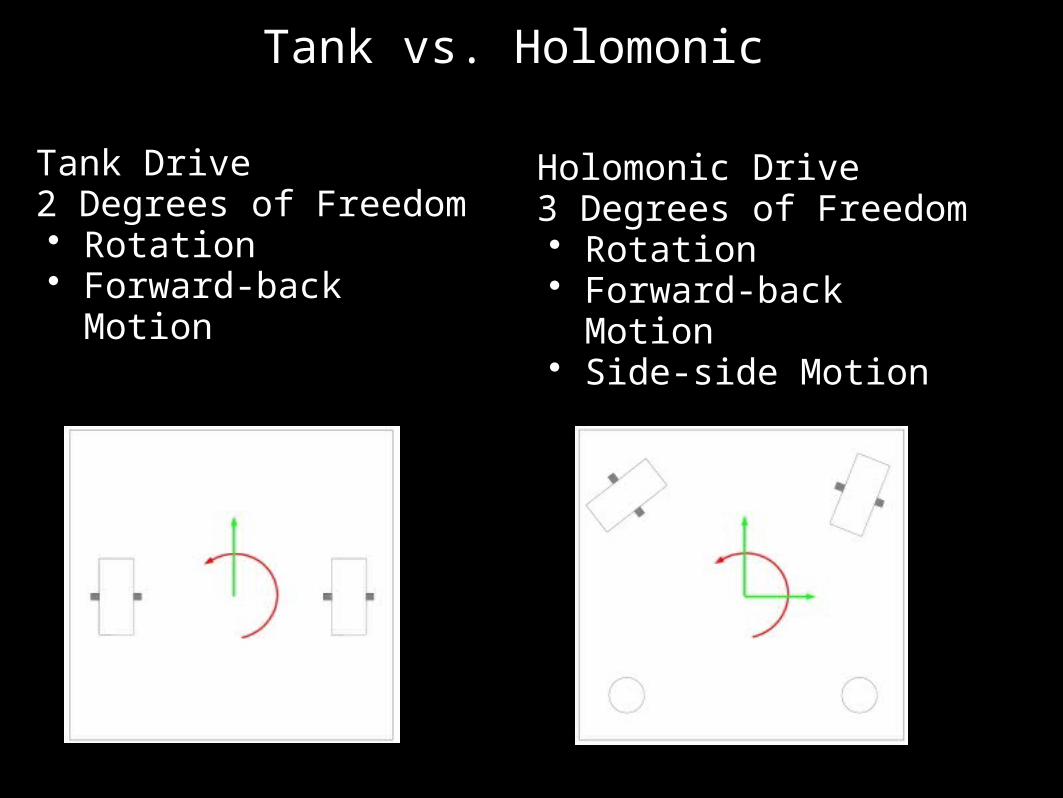
Tank vs. Holomonic
Tank Drive2 Degrees of Freedom• Rotation• Forward-back Motion
Holomonic Drive3 Degrees of Freedom• Rotation• Forward-back Motion• Side-side Motion
4 wheel drive or 3 wheel drive+ Immediate Turning+ Simple Control – 4 wheel independent- No brake- Minimal pushing power- Jittery ride, unless w/ dualies- Incline difficulty
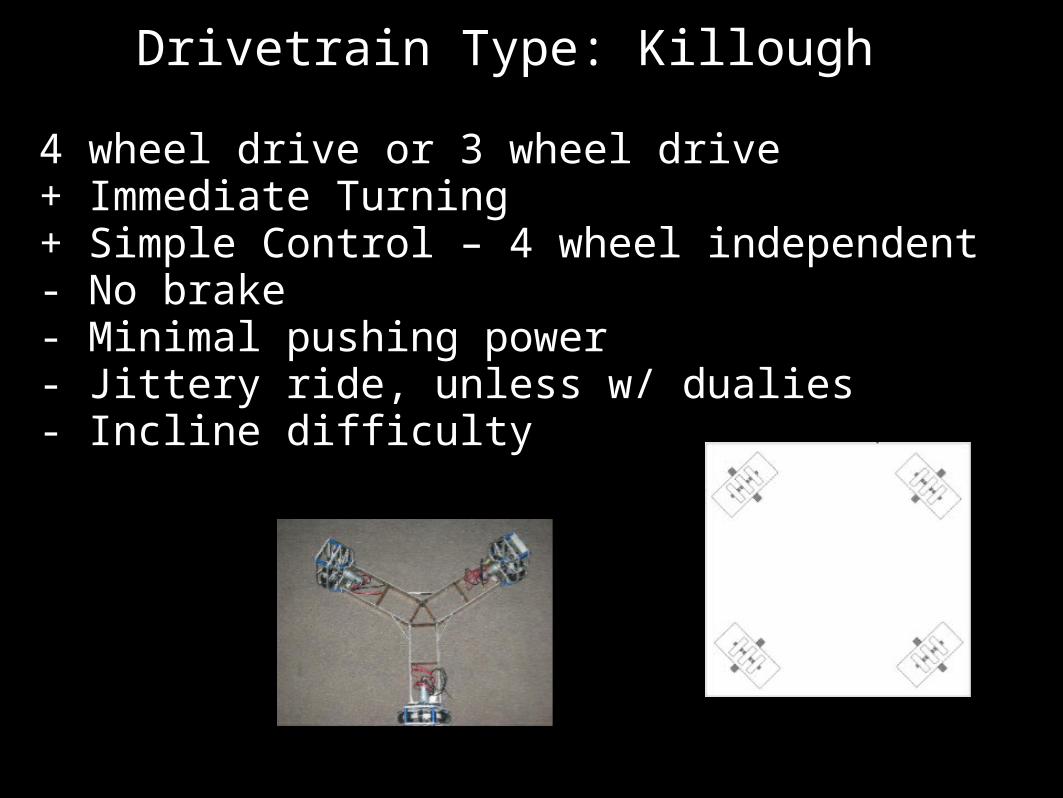
Drivetrain Type: Killough
+ Simple mechanisms+ Immediate turn+ Simple control – 4 wheel independent- Minimal brake- Minimal pushing power- Should have a suspension- Difficulty on inclines
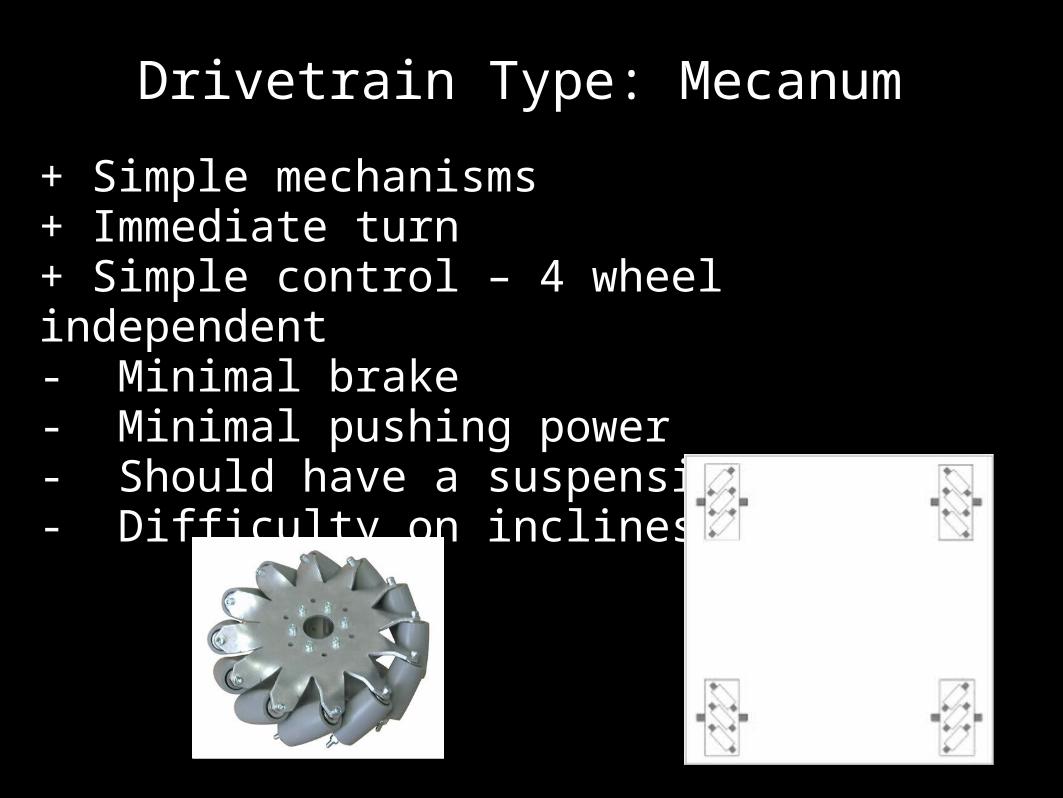
Drivetrain Type: Mecanum
http://www.youtube.com/watch?v=xgTJcm9EVnE
Team 1346 Mechanum Drive
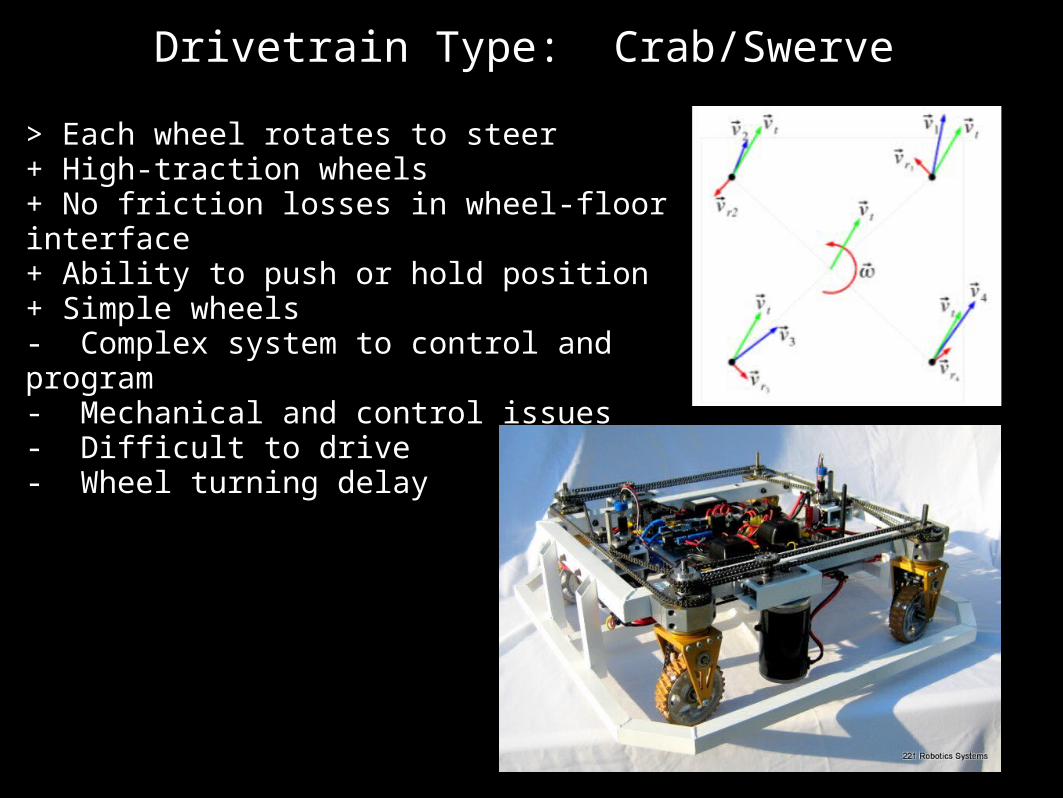
> Each wheel rotates to steer+ High-traction wheels+ No friction losses in wheel-floor interface+ Ability to push or hold position+ Simple wheels- Complex system to control and program- Mechanical and control issues- Difficult to drive- Wheel turning delay
Drivetrain Type: Crab/Swerve
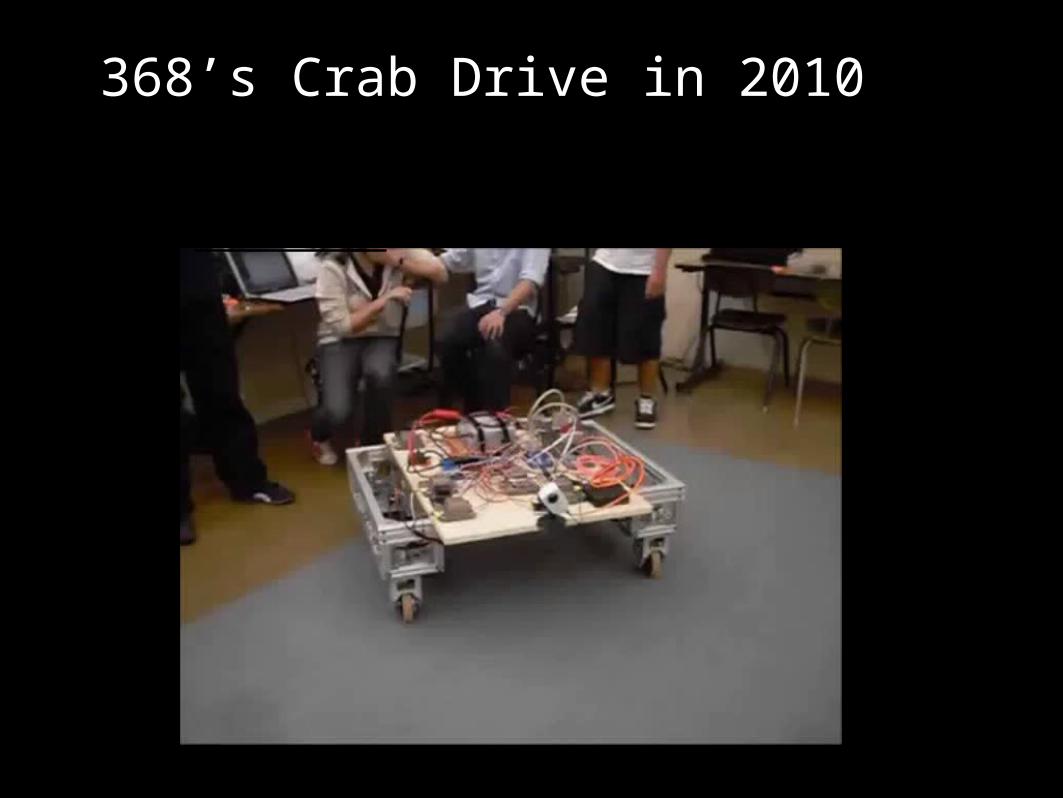
368’s Crab Drive in 2010
http://www.youtube.com/watch?v=q9uck-wRa_8
• Game dependent• Determined by wheel size and gear ratios• Controllable top speed: 15 ft/sec• Average 1-speed rate: 9 ft/sec• Good pushing speed: 4-5 ft/sec
Drivetrain Top Speeds
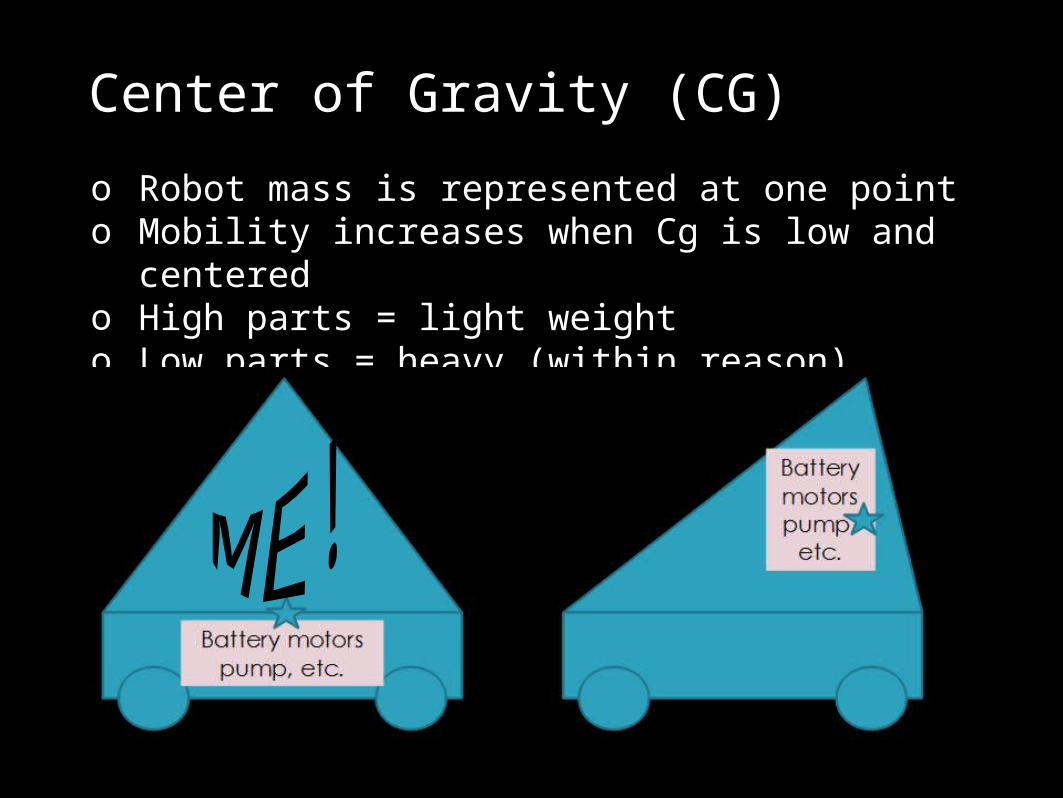
Center of Gravity (CG)
o Robot mass is represented at one pointo Mobility increases when Cg is low and
centeredo High parts = light weighto Low parts = heavy (within reason)
Which is more Stable?
Gearboxes/Transmissions
• Gear ratio determines top speed and motor load
• Single Speed and Shifting options
• CIMple Box shipped in 2011 KOP
• 1 or 2 CIMs per gearbox
• 2011 4 CIMs allowed
• Must be greased to reduce friction

Belts
+ Don’t Stretch
+ Can reach far- Need to buy in custom sizes
Chain Selection
#25 + Lightweight + Easy to install + Smaller - Easy to derail - "Steches" over time
#35 + Allows for slop + Minimal "stretching" + Heavy duty applications - More weight
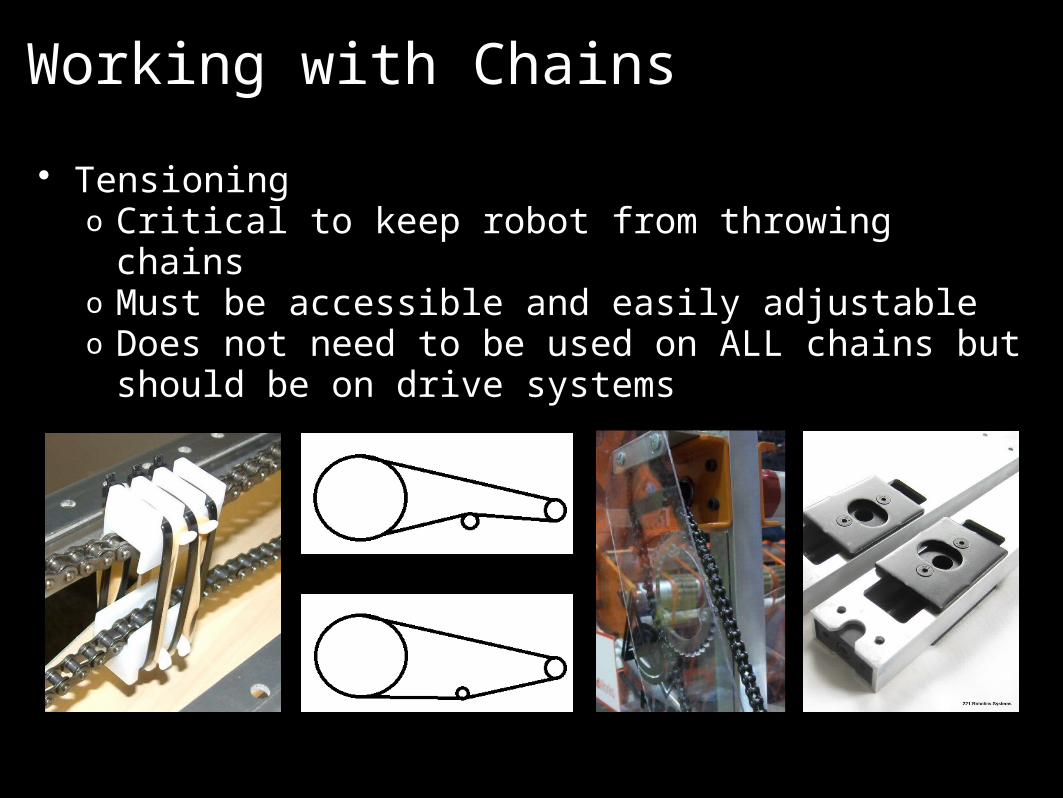
Working with Chains
• Tensioningo Critical to keep robot from throwing chainso Must be accessible and easily adjustableo Does not need to be used on ALL chains but
should be on drive systems
Look at other Designs!• Competitions• chiefdelphi.com• Team websites• YouTube• thebluealliance.com
Presented by: Paul Hines John Hines
Drive Types + Wheel Pictures www.AndyMark.com (FRC Supplier)
Swerve Drive Revolution Custom Framewww.team221.com (FRC Supplier)
Check out 1114’s Kitbot on Steroids• Simbotics.org
• Resources• Kitbot en esteroides