PROTOTIPE SISTEM PENGATUR JALUR KERETA API
145
TUGAS AKHIR PROTOTIPE SISTEM PENGATUR JALUR KERETA API HALAMAN SAMPUL Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik pada Program Studi Teknik Elektro Fakultas Sains dan Teknologi Universitas Sanata Dharma Disusun oleh: Celvien Kurniawan Wijaya NIM : 145114069 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS SANATA DHARMA YOGYAKARTA 2020 PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Transcript of PROTOTIPE SISTEM PENGATUR JALUR KERETA API

TUGAS AKHIR
PROTOTIPE SISTEM PENGATUR JALUR KERETA
API
HALAMAN SAMPUL
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun oleh:
Celvien Kurniawan Wijaya
NIM : 145114069
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2020
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

FINAL PROJECT
PROTOTYPE OF RAILWAY CONTROL SYSTEM
HALAMAN SAMPUL (Bahasa Inggris)
In a partial fulfilmentof the requirements
For the degree of Sarjana Teknik
Department of Electrical Engineering
Faculty of Science and Technology Sanata Dharma University
Arranged by:
Celvien Kurniawan Wijaya
NIM : 145114069
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2020
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vii
INTISARI
Seiring dengan pesatnya perkembangan teknologi, telah menjadi sebuah faktor
peluang bagi perkembangan sistem kontrol operasi pada industri perkeretaapian.
Penggunaan sistem cerdas untuk dapat meningkatkan efisiensi kinerja operasional, salah
satunya pada bidang perutean jalur kereta menjadi kunci dalam penelitian ini. Maka dari
itu, pada penelitian ini dibuat prototipe pengatur jalur kereta yang dilengkapi dengan
tampilan GUI dan dapat beroperasi secara otomatis.
Prototipe alat ini bekerja dengan menggunakan konsep perutean blok dimana setiap
blok hanya dapat digunakan oleh satu kereta sehingga jika ada kereta lain yang ingin
melalui blok tersebut, maka kereta tersebut akan dialihkan ke jalur yang lain. Spesifikasi
alat pada prototipe menggunakan PLC Schneider TM221CE40R sebagai pusat pengendali
sistem, HMI Wonderware Intouch sebagai GUI dalam mengamati kinerja sistem,
komponen fotosensor yang berupa gabungan antara rangkaian fotodioda dan rangkaian
LED sebagai pendeteksi keberadaan kereta, dan motor servo sebagai aktuator untuk wesel
pada jalur kereta.
Dari penelitian ini didapatkan hasil bahwa kesesuaian antara tampilan HMI dengan
keadaan nyata dalam kinerja sistem pada pengoperasian kondisi satu kereta memiliki
tingkat keberhasilan atau kesesuaian sebesar 100% dan pada kondisi dua kereta memiliki
tingkat keberhasilan sebesar 47,75%.
Kata kunci : PLC TM221CE40R, HMI Wonderware, blok.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

viii
ABSTRACT
Along with the rapid development of technology, has become an opportunity factor
for the development of operating control systems in the railroad industry. The use of smart
systems to improve operational performance efficiency, which in the field of railroad
routing is the key in this study. Therefore, in this study a prototype of a railroad track
controler is made and equipped with a GUI display and it can operate automatically.
This prototype tool works by using the concept of block routing where each block
can only be used by one train so that if there are other trains that want to go through the
block, then the train will be diverted to another track. The specification of the prototype
uses PLC Schneider TM221CE40R as the main controller of the system, HMI
Wonderware Intouch as a GUI in observing system performance, photosensor components
in the form of a combination of photodiode circuits and LED circuits as detection of trains,
and servo motors as aktuators for switching on train tracks.
From this research, the results show that the compatibility between the HMI display
with the real state of system performance in the operation of the condition of one train has
a success rate or suitability of 100% and in the condition of two trains has a success rate of
47.75%.
Keywords : PLC TM221CE40R, HMI Wonderware, block(s).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

x
DAFTAR ISI
HALAMAN SAMPUL .......................................................................................................... i
HALAMAN SAMPUL (Bahasa Inggris) .............................................................................. ii
LEMBAR PERSETUJUAN ................................................................................................. iii
LEMBAR PENGESAHAN .................................................................................................. iv
PERNYATAAN KEASLIAN KARYA ................................................................................ v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS ............................................................................................ vi
INTISARI ............................................................................................................................ vii
ABSTRACT ....................................................................................................................... viii
KATA PENGANTAR .......................................................................................................... ix
DAFTAR ISI ......................................................................................................................... x
DAFTAR GAMBAR .......................................................................................................... xiii
DAFTAR TABEL ............................................................................................................... xv
DAFTAR PERSAMAAN ................................................................................................. xvii
BAB I ..................................................................................................................................... 1
1.1. Latar Belakang ............................................................................................. 1
1.2. Tujuan dan Manfaat Penelitian .................................................................... 1
1.3. Batasan Masalah .......................................................................................... 2
1.4. Metodologi Penelitian .................................................................................. 2
BAB II ................................................................................................................................... 4
2.1. Persinyalan, Blok[25] dan Interlocking[26] Kereta ..................................... 4
2.2. Programmable Logic Controller (PLC)[4] .................................................. 4
2.2.1. PLC Schneider Modicon M221CE40R ................................................... 6
2.2.2. SoMachine Basic[8] ................................................................................ 7
2.2.3. Wonderware InTouch[4] ......................................................................... 7
2.3. Light Emitting Diode (LED)[16] ................................................................. 8
2.4. Dioda Foto (photodiode)[18] ....................................................................... 9
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xi
2.5. Motor Servo[24] ........................................................................................ 11
2.6. IC Timer 555(NE555) [10] ........................................................................ 12
2.7. Relay[23] ................................................................................................... 16
BAB III ................................................................................................................................ 20
3.1. Proses Kerja Sistem ................................................................................... 20
3.2. Perancangan Perangkat Keras .................................................................... 21
3.2.1. Perancangan Model Sistem ................................................................... 21
3.2.2. Perancangan Koneksi Pengkabelan Input/Output PLC ......................... 23
3.2.3. Perancangan Skematik Rangkaian Sistem............................................. 24
3.3. Perancangan Perangkat Lunak ................................................................... 29
3.3.1. Perancangan Algoritma Sistem ............................................................. 29
3.3.2. Perancangan Tampilan Antarmuka Sistem ........................................... 32
BAB IV ................................................................................................................................ 34
4.1. Perubahan Rancangan ................................................................................ 34
4.1.1. Perubahan Catu Daya Lampu LED ....................................................... 34
4.1.2. Perubahan Koneksi Pengkabelan Terminal Masukan PLC ................... 34
4.1.3. Perubahan Tampilan Menu pada HMI .................................................. 35
4.2. Implementasi Alat ...................................................................................... 36
4.2.1. Implementasi Model Sistem Fotosensor ............................................... 36
4.2.2. Implementasi Model Sistem Aktuator Jalur Kereta. ............................. 37
4.2.3. Implementasi Antarmuka Sistem .......................................................... 39
4.2.4. Implementasi Algoritma SoMachine Basic ........................................... 41
4.2.5. Implementasi Komunikasi antara PLC dan HMI .................................. 46
4.2.6. Alokasi Pengalamatan Sistem ............................................................... 49
4.3. Data Hasil Pengujian Sistem dan Analisis Data ........................................ 51
4.3.1. Data Hasil Pengujian Perangkat Keras .................................................. 51
4.3.2. Data Hasil Pengujian Perangkat Lunak ................................................. 53
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xii
BAB V ................................................................................................................................. 57
5.1. Kesimpulan ................................................................................................ 57
5.2. Saran .......................................................................................................... 57
DAFTAR PUSTAKA .......................................................................................................... 58
LAMPIRAN ...................................................................................................................... L-1
Lampiran 1. Cara penggunaan alat....................................................................... L-1
Lampiran 2. Daftar keterangan pada tampilan Menu Utama HMI. ..................... L-3
Lampiran 3. Daftar program ladder ..................................................................... L-4
Lampiran 4. Daftar program Wonderware ........................................................... L-7
Lampiran 5. Data hasil pengujian sistem ........................................................... L-11
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiii
DAFTAR GAMBAR
Gambar 1.1. Diagram blok perancangan ............................................................................... 3
Gambar 2.1. Sistem PLC.[3] ................................................................................................. 6
Gambar 2.2. PLC Modicon M221CE40R.[7] ....................................................................... 7
Gambar 2.3. Simbol dan bentuk LED.[16] ............................................................................ 8
Gambar 2.4. Gambar rangkaian LED. ................................................................................... 9
Gambar 2.5. Bentuk, Simbol, dan struktur Photodiode (Dioda Foto) ................................. 10
Gambar 2.6. Bagian motor servo. ........................................................................................ 11
Gambar 2.7. Gambar kendali pulsa motor servo. ................................................................ 11
Gambar 2.8. Konfigurasi pin dan bentuk IC timer 555. ...................................................... 13
Gambar 2.9. Diagram blok desain IC timer 555. ................................................................ 13
Gambar 2.10. Rangkaian monostable operation. ................................................................ 14
Gambar 2.11. Bentuk gelombang pada Monostable operation (kiri) dan grafik Output
Pulse Duration vs Capacitance (kanan). ............................................................................. 15
Gambar 2.12. Rangkaian Astable operation. ....................................................................... 16
Gambar 2.13. Bentuk gelombang pada Astable operation (kiri) dan grafik Free-Running
Frequency vs Capacitance (kanan). .................................................................................... 16
Gambar 2.14. Struktur relay elektromekanik.[19] ............................................................... 17
Gambar 2.15. Tipe kombinasi kontaktor relay elektromekanik.[22] .................................. 18
Gambar 2.16. Jenis sambungan saklar dengan istilah pole, break, throw.[21] ................... 18
Gambar 2.17. Struktur Solid State Relay.[23] ..................................................................... 19
Gambar 3.1. Diagram alur kerja sistem ............................................................................... 20
Gambar 3.2. Desain model sistem. ...................................................................................... 21
Gambar 3.3. Perancangan model fotosensor dari pandangan atas (A) dan samping (B). ... 22
Gambar 3.4. Perancangan model aktuator pengatur jalur kereta (kondisi aktif) dari
pandangan atas (A) dan samping (B). ................................................................................. 23
Gambar 3.5. Perancangan model aktuator pengatur jalur kereta (kondisi non-aktif) dari
pandangan atas (A) dan samping (B). ................................................................................. 23
Gambar 3.6. Rangakaian pemancar fotosensor. .................................................................. 25
Gambar 3.7. Rangkaian penerima fotosensor. ..................................................................... 25
Gambar 3.8. Rangkaian driver motor servo ........................................................................ 26
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiv
Gambar 3.9. Diagram alur kerja perangkat lunak sistem .................................................... 29
Gambar 3.10. Diagram alur proses deteksi kereta. .............................................................. 30
Gambar 3.11. Diagram alur proses pengaturan jalur. .......................................................... 31
Gambar 3.12. Diagram alur proses pengiriman data. .......................................................... 32
Gambar 3.13. Tampilan Menu masuk ................................................................................. 32
Gambar 3.14. Tampilan pengawasan .................................................................................. 33
Gambar 3.15. Tampilan kontrol .......................................................................................... 33
Gambar 4.1. Implementasi alat pengatur jalur kereta. ......................................................... 36
Gambar 4.2. Implementasi model fotosensor. ..................................................................... 37
Gambar 4.3. Implementasi komponen LED. ....................................................................... 37
Gambar 4.4. Implementasi komponen photodiode. ............................................................. 37
Gambar 4.5. Komponen PCB driver aktuator jalur kereta. ................................................. 38
Gambar 4.6. Implementasi servo pada model sistem aktuator jalur kereta. ........................ 38
Gambar 4.7. Tampilan keadaan komponen aktuator aktif................................................... 39
Gambar 4.8. Tampilan keadaan komponen aktuator nonaktif............................................. 39
Gambar 4.9. Implementasi tampilan Menu Login. .............................................................. 40
Gambar 4.10. Implementasi tampilan Menu Utama............................................................ 40
Gambar 4.11. Implementasi tampilan Menu Kontrol. ......................................................... 41
Gambar 4.12. Tampilan konfigurasi Ethernet pada SoMachine Basic. ............................... 47
Gambar 4.13. Tampilan jendela Topic Definition. .............................................................. 47
Gambar 4.14. Tampilan jendela MBENET Topic Definition. ............................................. 48
Gambar 4.15. Tampilan notifikasi lisensi aplikasi Wonderware Intouch. .......................... 48
Gambar 4.16. Tampilan jendela Access Names. .................................................................. 49
Gambar 4.17. Tampilan jendela Add Access Names. .......................................................... 49
Gambar L.1. koneksi Ethernet antara PLC TM221CE40R dengan komputer. ................. L-1
Gambar L.2. Tombol modul PLC. ..................................................................................... L-1
Gambar L.3. Tampilan notifikasi 1. .................................................................................. L-2
Gambar L.4. Tampilan notifikasi 2. .................................................................................. L-2
Gambar L.5. Tampilan notifikasi 3. .................................................................................. L-2
Gambar L.6. Tampilan daftar alamat IP. ........................................................................... L-2
Gambar L.7. Tombol ON/OFF sistem pada PLC. ............................................................. L-3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xv
DAFTAR TABEL
Tabel 2.1. Spesifikasi PLC Schneider Modicon M221CE40R (sebagian).[7] ...................... 6
Tabel 2.2. Daftar warna, bahan semikonduktor, dan nilai tegangan maju LED.[16] ............ 9
Tabel 2.3. Perbandingan bahan semikonduktor photodiode. .............................................. 10
Tabel 3.1. Keterangan simbol desain model sistem. ........................................................... 22
Tabel 3.2. Rancangan pengalamatan terminal masukan PLC. ............................................ 24
Tabel 3.3. Rancangan pengalamatan terminal keluaran PLC. ............................................. 24
Tabel 4.1. Implementasi pengalamatan terminal masukan PLC. ........................................ 34
Tabel 4.2. Perbandingan desain rancangan dengan implementasi tampilan menu masuk. . 35
Tabel 4.3. Perbandingan desain rancangan dengan implementasi tampilan pengawasan. .. 35
Tabel 4.4. Perbandingan desain rancangan dengan implementasi tampilan kontrol. .......... 36
Tabel 4.5. Fungsi tombol pada Menu Kontrol..................................................................... 41
Tabel 4.6. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian penampil
HMI. .................................................................................................................................... 42
Tabel 4.7. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian penampil
HMI. (lanjutan) .................................................................................................................... 43
Tabel 4.8. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian penampil
HMI. (lanjutan) .................................................................................................................... 44
Tabel 4.9. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian penampil
HMI. (lanjutan) .................................................................................................................... 45
Tabel 4.10. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian penampil
HMI. (lanjutan) .................................................................................................................... 46
Tabel 4.11. Alokasi hubungan alamat memori PLC dan HMI beserta fungsinya. .............. 50
Tabel 4.12. Alokasi hubungan alamat memori PLC dan HMI beserta fungsinya. (lanjutan)
............................................................................................................................................. 51
Tabel 4.13. Data tegangan dan arus komponen fotosensor. ................................................ 52
Tabel 4.14. Data besar sudut komponen aktuator wesel (servo). ........................................ 52
Tabel L.1. Data percobaan 1 posisi kereta di antara wesel 1 dan fotosensor 1A. ........... L-11
Tabel L.2. Data percobaan 1 posisi kereta di antara wesel 1 dan fotosensor 2A. ........... L-13
Tabel L.3. Data percobaan 1 posisi kereta di antara wesel 1 dan fotosensor 3B. ........... L-17
Tabel L.4. Data percobaan 1 posisi kereta di antara wesel 2 dan fotosensor 1B. ........... L-19
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvi
Tabel L.5. Data percobaan 1 posisi kereta di antara wesel 2 dan fotosensor 2B. ........... L-21
Tabel L.6. Data percobaan 1 posisi kereta di antara wesel 2 dan fotosensor 3A. ........... L-25
Tabel L.7. Data percobaan 1 posisi kereta1 (wesel 1 ke blok 1) dan kereta2 (wesel 1 ke
blok 3). ............................................................................................................................. L-26
Tabel L.8. Data percobaan 1 posisi kereta1 (wesel 2 ke blok 1) dan kereta2 (wesel 2 ke
blok 3). ............................................................................................................................. L-40
Tabel L.9. Data percobaan 1 posisi kereta1 (wesel 2 ke blok 2) dan kereta2 (wesel 1 ke
blok 3). ............................................................................................................................. L-53
Tabel L.10. Data percobaan 1 posisi kereta1 (wesel 1 ke blok 2) dan kereta2 (wesel 2 ke
blok 1). ............................................................................................................................. L-63
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvii
DAFTAR PERSAMAAN
Persamaan (2.1) ..................................................................................................................... 9
Persamaan (2.2) ................................................................................................................... 14
Persamaan (2.3) ................................................................................................................... 15
Persamaan (2.4) ................................................................................................................... 15
Persamaan (2.5) ................................................................................................................... 15
Persamaan (2.6) ................................................................................................................... 15
Persamaan (2.7) ................................................................................................................... 15
Persamaan (2.8) ................................................................................................................... 15
Persamaan (3.1) ................................................................................................................... 25
Persamaan (3.2) ................................................................................................................... 27
Persamaan (3.3) ................................................................................................................... 27
Persamaan (3.4) ................................................................................................................... 27
Persamaan (3.5) ................................................................................................................... 27
Persamaan (3.6) ................................................................................................................... 27
Persamaan (3.7) ................................................................................................................... 27
Persamaan (3.8) ................................................................................................................... 27
Persamaan (3.9) ................................................................................................................... 28
Persamaan (3.10) ................................................................................................................. 28
Persamaan (3.11) ................................................................................................................. 28
Persamaan (3.12) ................................................................................................................. 28
Persamaan (3.13) ................................................................................................................. 28
Persamaan (3.14) ................................................................................................................. 29
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
1
BAB I
PENDAHULUAN
1.1. Latar Belakang
Pada masa sekarang ini perkembangan teknologi sudah berkembang begitu cepat.
Alat-alat yang dahulunya masih mengunakan tenaga manusia, pada masa sekarang ini
sudah mulai tergantikan oleh sistem komputer atau sistem-sistem kontrol yang dapat
beroperasi secara otomatis. Demikian juga dengan perkembangan sistem pengaturan jalur
kereta api di Indonesia. Pada awalnya sistem pengaturan jalur kereta masih menggunakan
tenaga manusia (manual) dan belum terintegrasi sehingga dalam pengoperasian cenderung
lama dan tidak efisien dikarenakan kereta yang ingin merubah rute harus berhenti sejenak
di dekat di dekat persimpangan jalur untuk mengubah jalur kereta dengan tuas. Kemudian
dalam perkembangannya, sistem pengaturan jalur kereta api mulai berkembang menjadi
terintegrasi. hal ini terlihat dari metode pengaturan jalur kereta dilakukan dengan
mengubah pengaturan yang ada di blok panel yang letaknya terpusat di stasiun, meskipun
cara pengoperasiannya masih dengan menggunakan tuas (manual) yang akhirnya
mengalami pengembangan dimana cara pengoperasian blok panel berubah dengan
penggunaan secara elektronis, tetapi sistem tersebut juga masih dioperasikan secara
manual.
Berdasarkan dari uraian permasalahan di atas, maka timbul sebuah konsep dimana
proses pengaturan jalur dapat dilakukan secara otomatis melalui algoritma dalam sistem
tersebut. Hal inilah yang menjadi dasar konsep dalam pembuatan prototipe sistem pengatur
jalur kereta api ini. Sebelum penelitian ini dilakukan, telah ada penelitian lain yang
berhubungan dengan konsep pengaturan sistem pada kereta api yang dilakukan oleh
Fillipus Edi Wibowo (005114080) mahasiswa alumni Teknik Universitas Sanata Dharma
yang berjudul Pengendalian Palang Pintu Rel Kereta Api secara Otomatis untuk
Menunjang Sistem Prioritas Lampu Lalu Lintas[1].
1.2. Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah:
1. Membuat sistem pengatur jalur kereta yang dapat bekerja secara otomatis.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2
2. Membuat sistem antarmuka pengatur jalur kereta sebagai sarana pengawasan
sistem.
Manfaat dari penelitian ini adalah:
1. Memberikan kontribusi sebagai salah satu alternatif solusi dalam proses
pengembangan sistem pengaturan jalur kereta api di Indonesia.
2. Menyediakan sarana pendukung perkuliahan tentang aplikasi PLC.
1.3. Batasan Masalah
Agar permasalahan yang akan dibahas tidak terlalu luas, maka penelitian ini akan
menggunakan Batasan masalah sebagai berikut:
1. Menggunakan PLC Schneider Modicon M221CE40R sebagai pusat pengendali
sistem.
2. Pembatasan jumlah kereta sebanyak 2 kereta dengan kondisi kereta berjalan
terus.
3. Pembatasan jumlah jalur rel sebanyak 2 jalur utama dan 1 jalur alternatif dengan
jumlah persimpangan pada jalur rel sebanyak 2 buah dengan jumlah cabang
dalam persimpangan sebanyak 2 cabang.
4. Menggunakan software Wonderware sebagai antarmuka.
5. Menggunakan motor servo sebagai aktuator pengatur jalur kereta.
6. Menggunakan fotodioda sebagai sensor dalam sistem.
1.4. Metodologi Penelitian
Metodologi yang digunakan dalam penelitian tugas akhir ini adalah sebagai berikut:
1. Mengumpulkan bahan-bahan referensi mengenai sebagian atau keseluruhan
sistem dari buku teks, jurnal, internet dan lain-lain.
2. Perancangan sistem hardware dan software. Tahap ini bertujuan untuk mencari
bentuk rancangan yang tepat untuk sistem yang akan dibuat dengan
mempertimbangkan berbagai aspek permasalahan dan kebutuhan yang ditentukan
dari sistem yang akan dibuat. Gambar 1.1. memperlihatkan blok model yang
akan dirancang.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

3
Gambar 1.1. Diagram blok perancangan
3. Proses pengujian alat dan pengambilan data. Pada tahap ini, percobaan sistem
akan dilakukan dengan posisi awal dan jumlah kereta dalam rel yang beragam.
Data yang akan diambil pada percobaan ini berupa:
a. Data tegangan dan arus dari komponen sensor fotodioda.
b. Data arus dari komponen aktuator motor servo.
c. Data keadaan sistem yang meliputi: keadaan algoritma program ladder,
keadaan tampilan HMI, dan keadaan fisik kerja sistem termasuk dengan
posisi kereta pada tiap urutan proses dalam satu percobaan.
4. Proses analisis data dan kesimpulan. Data-data utama yang didapat akan
dianalisis dengan metode statistika rerata berdasarkan perbandingan jumlah
urutan proses saat pengujian dengan jumlah urutan proses dimulai terjadinya
penyimpangan dalam pengujian. Sedangkan untuk data-data pendukung akan
dianalisis dengan melihat spesifikasi nilai tegangan pemicu atau karakteristik alat
atau komponennya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4
BAB II
DASAR TEORI
Pada bab ini akan dijelaskan mengenai alat-alat dan dasar teori yang akan digunakan
dalam penelitian ini.
2.1. Persinyalan, Blok[25] dan Interlocking[26] Kereta
Persinyalan kereta adalah seperangkat alat yang berfungsi untuk memberikan
informasi untuk mengatur dan mengontrol pengoperasian kereta api. Alat-alat persinyalan
tersebut biasanya diletakkan pada suatu tempat tertentu dalam perlintasan kereta. Tempat-
tempat tersebut merupakan koneksi antara ujung kelompok rangkaian rel (blok) yang mana
memiliki aturan tiap blok hanya dapat diisi oleh 1 rangkaian kereta (dua blok atau lebih
secara bersebelahan jika rangkaian keretanya panjang). Pada persinyalan kereta, isyarat
yang biasa digunakan berupa bentuk (posisi/gerakan) dan warna (cahaya).
Pesan yang disampaikan dalam persinyalan kereta terbagi menjadi 3 jenis, yaitu:
a. Kondisi aman
b. Kondisi tidak aman
c. Kondisi berhati-hati (aman sesuai kecepatan tertentu)
Proses interlocking merupakan proses perutean pada jalur kereta untuk mencegah
terjadinya kecelakaan kereta. Cara kerja dari proses ini adalah dengan mengunci rute jalur
kereta yang akan dilalui dan memberikan sinyal tidak aman pada kereta lain yang akan
melintas melalui jalur yang sudah dikunci tersebut.
2.2. Programmable Logic Controller (PLC)[4]
Progammable Logic Controller (PLC) merupakan suatu perangkat elektronik yang
dirancang untuk dapat beroperasi secara digital dengan menggunakan memori sebagai
media penyimpanan instruksi program yang berisi fungsi-fungsi logika
(pencacah/counting, urutan proses/sequencing, pewaktuan/timing, dan aritmatika) untuk
mengontrol proses suatu sistem.
Di dalam sistem PLC terdapat 5 komponen dasar[3], yaitu:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

5
1. Unit prosesor atau Central Prosesing Unit (CPU)
Komponen ini berisi mikroprosesor yang melakukan proses deteksi sinyal input,
melakukan proses pengambilan keputusan tindakan kontrol terhadap sinyal input
yang diterima sesuai dengan instruksi program yang tersimpan di memori, serta
mengkomunikasikan hasil pengambilan keputusan sebagai sinyal kontrol
keluaran ke sistem.
2. Unit catu daya (Power supply)
Komponen ini berfungsi untuk mengkonversi sumber listrik bolak-balik / AC
(Alternating Current) menjadi sumber listrik searah / DC (Direct Current) yang
dibutuhkan oleh CPU dan alat alat system yang membutuhkan sumber listrik
searah.
3. Perangkat pemograman
Komponen ini digunakan untuk memasukkan (download) program yang
dibutuhkan PLC ke dalam memorinya.Biasanya komponen ini berupa aplikasi
software IDE (Integrated Development Environment).
4. Unit memori
Komponen ini digunakan sebagai tempat penyimpanan baik program dasar yang
yang dibutuhkan PLC dalam proses kontrol sistem, maupun nilai-nilai suatu
variabel yang disimpan selama sistem berjalan.
Berdasarkan durasi penyimapanan data, unit memori terbagi menjadi 2 macam:
- ROM (Read Only Memory) yang bersifat permanen meski suplai dayanya
hilang.
- RAM(Random Access Memory) yang bersifat sementara (data akan terhapus
jika suplai dayanya hilang).
5. Bagian input dan output
Komponen ini berfungsi sebagai terminal untuk mengirimkan sinyal tegangan
(tinggi/rendah) baik dari sistem masukan (sensor dan transduser) ke CPU
maupun dari CPU ke sistem keluaran (aktuator).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

6
Gambar 2.1. Sistem PLC.[3]
2.2.1. PLC Schneider Modicon M221CE40R
Modicon M221CE40R merupakan salah satu produk PLC dari Schneider yang akan
digunakan dalam penelitian ini. PLC ini memiliki fitur-fitur sebagai berikut:
Tabel 2.1. Spesifikasi PLC Schneider Modicon M221CE40R (sebagian).[7]
tegangan suplai 100...240V AC
batas: 85...264V
Batas arus masuk suplai <=40A
Jumlah port IO logika (diskret) 40 port, terdiri dari: input 24 port
output 16 port
Spesifikasi port IO logika
(diskret)
Input
Tegangan 24V DC
Arus 7mA
5mA (fast input)
Output
Tegangan 5...125V AC
5...250V DC
Arus 2A
Nilai tegangan logika input Tinggi >=15 V
Rendah <=5 V
Jumlah port IO analog 2 port (rentang: 0...10V)
Spsifikasi poert IO analog Resolusi 10 bit
Nilai LSB 10mV
Spesifikasi nilai arus per
output Common
7A
Tipe koneksi yang reintegrasi USB port dengan konektor mini B USB 2.0
Ethernet dengan konektor RJ45
Non isolated serial link “serial1” dengan konektor RJ45 dan
Interface RS232/RS485
Kecepatan transmisi RS485 (panjang bus 15m) 1,2...115,2kbit/s
RS232 (panjang bus 3m)
USB 480Mbit/s
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

7
Gambar 2.2. PLC Modicon M221CE40R.[7]
2.2.2. SoMachine Basic[8]
SoMachine basic merupakan sebuah piranti lunak pemrograman grafis standar untuk
memrogram PLC Schneider jenis M221, dimana konfigurasi penyetingan hardware PLC
dapat disertai modul ekspansi (TM2 dan TM3) dan TMC2 Catridges. Software ini juga
mendukung beberapa bahasa program, yaitu:
a. Diagram tangga (Ladder Diagram Language)
b. Daftar instruksi (Instruction List Language)
c. GRAFCET (GRAphe Fonctionnel de Commande Etapes/Transitions atau Step
Transition function chart)
2.2.3. Wonderware InTouch[4]
Wonderware InTouch merupakan perangkat lunak Human Machine Interface (HMI)
yang dilengkapi dengan fitur dasar SCADA (Supervisory Control and Data Acquisition)
software. Program-program yang dimiliki Wonderware untuk mendukung fitur-fitur
SCADA meliputi:
a. Wonderware Historian, program yang menangani database berbasis SQL Server.
b. Wonderware Information Software, program yang menangani pembuatan portal
internet untuk aplikasi HMI/SCADA.
c. Wonderware Active Factory, program untuk melakukan analisa dan laporan dari
data di lapangan.
d. Wonderware InControl, program pengendalian yang dapat menggantikan PLC
sebagai soft control (PC based control).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

8
Dalam pengoperasiannya,Wonderware Intouch memiliki tiga bagian utama, yaitu:
a. InTouch Application Manager
InTouch Application Manager berfungsi untuk mengorganisasikan aplikasi yang
akan dibuat (tiap aplikasi memiliki folder/directory tersendiri untuk menyimpan
file-file yang dibutuhkan/digunakan oleh aplikasi).
b. InTouch WindowMaker
InTouch WindowMaker merupakan bagian development environment dari
Wonderware InTouch. Pada bagian ini proses pendesainan grafis dan
pemrograman instruksi baik animasi maupun program kontrol HMI dibuat.
c. InTouch WindowViewer
InTouch WindowViewer merupakan bagian Run-time environment dari
Wonderware InTouch. Pada bagian ini hasil desain dari WindowMaker (InTouch
QuickScripts) dapat dieksekusi dan diamati prosesnya.
2.3. Light Emitting Diode (LED)[16]
Light Emitting Diode (LED) merupakan salah satu komponen elektronika dalam
kelompok diode yang dapat memancarkan cahaya monokrom (satu warna) pada kondisi
tegangan maju (forward bias).
Gambar 2.3. Simbol dan bentuk LED.[16]
Warna-warna atau jenis cahaya yang dipancarkan oleh LED tergantung pada jenis
bahan semikonduktor yang digunakan.dan masing-masing warna atau jenis cahaya
memiliki besar tegangan maju yang beragam. Berikut ini adalah warna-warna dan jenis
cahaya beserta bahan dan nilai tegangan maju dari LED:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

9
Tabel 2.2. Daftar warna, bahan semikonduktor, dan nilai tegangan maju LED.[16]
No Warna atau jenis cahaya Bahan semikonduktor Tegangan maju (Vf)
[I=20mA]
1 Infra merah (850-940nm) Gallium Arsenide (GaAs) 1,2V
2 Merah (630-660nm) Gallium Arsenide Phosphide (GaAsP) 1,8V
3 Jingga (605-620nm) Gallium Arsenide Phosphide (GaAsP) 2,0V
4 Kuning (585-595nm) Gallium Arsenide Phosphide Nitride
(GaAsP:N) 2,2V
5 Hijau (550-570nm) Aluminium Gallium Phosphide (AlGaP) 3,5V
6 Biru (430-505nm) Silicon Carbide (SiC) 3,6V
7 Putih (450nm) Gallium Indium Nitride (GaInN) 4,0V
Dalam pengaplikasiannya, LED dalam kondisi aktif forward bias harus dipasang
secara seri dengan sebuah resistor yang konfigurasinya dapat dilihat pada Gambar 2.4. Hal
ini dikarenakan kondisi aktif forward bias pada dioda (LED) equivalen dengan kondisi
arus pendek pada rangkaian listrik. (resistor difungsikan sebagai pembatas arus). Adapun
rumus yang digunakan untuk menghitung besar resistor tersebut, yaitu:
𝑅 =𝑉𝑠 − 𝑉𝑓
𝐼 [6] (2.1)
Di mana:
- R : nilai resistor seri (Ohm [Ω])
- Vs : tegangan sumber/catu daya (Volt [V])
- Vf : tegangan maju dioda (Volt [V])
- I : Arus listrik operasional pada LED (Ampere[A]), biasanya 20mA.[16]
Gambar 2.4. Gambar rangkaian LED.
2.4. Dioda Foto (photodiode)[18]
Diode foto adalah sebuah dioda yang dioptimasi untuk menghasilkan aliran elektron
(arus listrik) sebagai respon apabila terpapar oleh sinar ultraviolet, cahaya tampak, atau
cahaya infra merah.
D1
DIODE-LED
R1
R
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

10
Gambar 2.5. Bentuk, Simbol, dan struktur Photodiode (Dioda Foto)
Bahan Semikonduktor yang biasanya digunakan sebagai bahan dasar diode foto
adalah Silikon (Si), Germanium (Ge), Indium gallium arsenide phosphide (InGaAsP),
Indium gallium arsenide (InGaAs), dimana bahan-bahan tersebut memiliki karakteristik
sebagai berikut:
Tabel 2.3. Perbandingan bahan semikonduktor photodiode.
Bahan
Semikonduktor
Tingkat Arus
Gelap
Tingkat
Kecepatan Rentang kepekaan Harga
Silikon (Si) Rendah Tinggi 400nm – 1000nm
(terbaik: 800nm – 900nm) Terjangkau
Germanium (Ge) Tinggi Rendah 900nm – 1600nm
(terbaik: 1400nm – 1500nm) Terjangkau
Indium gallium
arsenide phosphide
(InGaAsP)
Rendah Tinggi 1000nm – 1350nm
(terbaik: 1100nm – 1300nm) Mahal
Indium gallium
arsenide (InGaAs) Rendah Tinggi
900nm – 1700nm
(terbaik: 1300nm – 1600nm) Mahal
Photodiode memiliki beberapa mode pengoperasian, yaitu:
a. Mode Photovoltaic (zero bias)
Pada mode ini, photodiode dapat menghasilkan tegangan yang dapat diukur.
Tegangan yang dihasilkan pada mode ini bersifat non-linear dan dinamis dalam
rentang yang sangat kecil.
b. Mode Photoconductive
Pada mode ini, photodiode dipasangkan secara bias terbalik (reversed biased
voltage) dan menggunakan rangkaian penguat elektronika (rangkaian amplifier)
sebagai penggerak beban. Pada rangkaian ini, photodiode berfungsi sebagai
saklar (switch) yang mengalirkan arus listrik ketika dikenakan cahaya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

11
c. Mode Avalanche
Mode ini hanya dapat dilakukan dengan Avalanche Photodiode yang beroperasi
pada kondisi reverse bias yang tinggi, dimana dapat meningkatkan respon
rangakaian atau alat.
2.5. Motor Servo[24]
Motor servo merupakan sejenis motor dengan sistem umpan balik tertutup yang
terdiri dari sebuah motor DC, serangkaian gear, rangkaian kontrol, dan potensiometer.
Fungsi potensiometer dalam motor servo adalah untuk menentukan batas sudut dari
putaran servo. Sementara pengaturan sudut sumbu motor servo dapat diatur berdasarkan
lebar pulsa sinyal PWM dengan frekuensi sebesar 50Hz atau dengan periode sebesar 20ms
yang dikirim melalui kaki sinyal dari kabel servo itu sendiri.
Gambar 2.6. Bagian motor servo.
Gambar 2.7. Gambar kendali pulsa motor servo.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

12
Sinyal masukan PWM tersebut dapat diperoleh ketika kondisi Ton duty cycle (periode
sinyal on) aktif selama 1,5ms. Dalam posisi tersebut rotor dari motor berhenti tepat di
tengah-tengah atau berada pada sudut nol derajat (netral).Pada saat kondisi Ton duty cycle
kurang dari angka 1,5ms, maka rotor akan berputar berlawanan arah jarum jam. Sebaliknya
pada saat kondisi Ton duty cycle lebih dari angka 1,5 ms, maka rotor akan berputar searah
jarum jam. Proses ini akan dijelaskan pada Gambar 2.7.
2.6. IC Timer 555(NE555) [10]
IC timer 555 (NE555) merupakan komponen elektronik yang dapat menghasilkan
waktu tunda (time delays) atau osilasi (oscillation) yang akurat dan stabil. Komponen ini
dikembangkan oleh Hanz R. Camendzind yang bekerja di perusahaan Signetic Corporation
pada tahun 1970-an. Berdasarkan letak konfigurasi terminalnya, IC NE555 memiliki nama
dan fungsi pada tiap portnya. Berikut ini adalah susunan, konfigurasi, dan fungsi pin kaki
IC 555 tipe DIP (Dual Inline Package) 8:
a. Kaki 1 (GND)
Pin ini berfungsi sebagai terminal Ground atau Terminal Negatif sumber tegangan
DC.
b. Kaki 2 (TRIG)
Pin ini berfungsi sebagai Terminal Trigger (Pemicu), digunakan untuk memicu
Output menjadi “High”, kondisi High akan terjadi apabila level tegangan pada kaki
Trigger ini berubah dari High menuju ke tegangan yang lebih kecil dari 1/3 Vcc
atau lebih kecil dari 1/3 dari sumber tegangan pada IC.
c. Kaki 3 (OUT)
Pin ini berfungsi sebagai Terminal Output (Keluaran) yang memiliki 2 keadaan
yaitu “Tinggi/high” dan “Rendah/Low”.
d. Kaki 4 (RESET)
Pin ini berfungsi sebagai Terminal Reset. Apabila kaki 4 di-ground-kan, Output IC
akan menjadi rendah dan menyebabkan perangkat ini menjadi OFF. Oleh karena
itu, untuk memastikan IC dalam kondisi ON, Kaki 4 biasanya diberikan sinyal
“High”.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

13
e. Kaki 5 (CONT)
Pin ini berfungsi sebagai Terminal Control Voltage (Pengatur Tegangan),
memberikan akses terhadap pembagi tegangan internal. Secara default, tegangan
yang ditentukan adalah 2/3 Vcc.
f. Kaki 6 (THRES)
Pin ini berfungsi sebagai Terminal Threshold, digunakan untuk membuat Output
menjadi “Low”. Kondisi “Low” pada Output ini akan terjadi apabila Kaki 6 atau
Kaki Threshold ini berubah dari Low menuju > 1/3Vcc (lebih besar dari 1/3Vcc).
g. Kaki 7 (DISCH)
Pin ini berfungsi sebagai Terminal Discharge. Pada saat Output “Low”, Impedansi
kaki 7 adalah “Low”. Sedangkan pada saat Output “High”, Impedansi kaki 7 adalah
“High”. Kaki Discharge ini biasanya dihubungkan dengan Kapasitor yang
berfungsi sebagai penentu interval pewaktuan. Kapasitor akan mengisi dan
membuang muatan seiring dengan impedansi pada kaki 7. Waktu pembuangan
muatan inilah yang menentukan Interval Pewaktuan dari IC555.
h. Kaki 8 (Vcc)
Pin ini berfungsi sebagai Terminal Positif sumber tegangan DC (5V sampai 15V).
Gambar 2.8. Konfigurasi pin dan bentuk IC timer 555.
Gambar 2.9. Diagram blok desain IC timer 555.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

14
Waktu tunda / osilasi yang dihasilkan oleh IC Timer 555 dikontrol oleh rangkaian
RC. Berdasarkan dari variasi rangkaian RC yang digunakan, IC timer 555 memiliki variasi
mode operasi yang diantaranya adalah sebagai berikut:
1. Monostable operation
Pada Monostable operation, proses pengaktifan keluaran pulsa pada pin “OUT”
(mengahsilkan nilai sinyal tinggi selama durasi tertentu) dipengaruhi oleh input
sinyal (nilai rendah) pada pin “TRIG” dimana proses pemicuannya dilakukan
secara manual melalui sinyal masukan dari luar komponen IC. Saat pin “TRIG”
terpicu, selain mengubah nilai keluaran pada pin “OUT”, pin “TRIG” juga
membuat kapasitorpada rangkaian RC yang terhubung ke pin “THRES” dan pin
“DISCH” (lihat Gambar 2.9.) melakukan proses pengisian muatan. Saat tegangan
kapasitor pada rangkaian RC mencapai tegangan threshold (2/3 Vcc) dan nilai
logika pada pin “TRIG” adalah tinggi, maka nilai logika keluaran pada pin
“OUT”akan berubah menjadi rendah. Adapun persamaan untuk menghitung
panjang durasi pulsa keluaran (logika tinggi) pada pin “OUT” berupa:
𝑡𝑤 = 1,1. 𝑅𝐴. 𝐶 (2.2)
Dengan:
a) tw : durasi pulsa logika tinggi keluaran IC timer 555 (detik [s])
b) RA : nilai resistor rangkaian RC pada IC timer 555 (Ohm [Ω])
c) C : nilai kapasitor rangkaian RC pada IC timer 555 (Farad [F])
Gambar 2.10. Rangkaian monostable operation.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

15
Gambar 2.11. Bentuk gelombang pada Monostable operation (kiri) dan grafik Output
Pulse Duration vs Capacitance (kanan).
2. Astable operation
Pada Astable operation, konfigurasi rangkaiannya menyerupai rangkaian
monostable operation (Gambar 2.9.), hanya yang membedakannya adalah
penyambungan pin “TRIG” dengan pin “THRES” (untuk self triggering) dan
adanya penambahan resistor (RB) di antara pin “THRES” dan “DISCH” seperti
yang ditampilkan pada Gambar 2.12. Adapun persamaan untuk menghitung
panjang durasi pulsa keluaran (logika tinggi) pada pin “OUT” berupa:
𝑡𝐻 = 0,693(𝑅𝐴 + 𝑅𝐵)𝐶 (2.3)
𝑡𝐿 = 0,693. 𝑅𝐵. 𝐶 (2.4)
𝑇 = 𝑡𝐻 + 𝑡𝐿 = 0,693(𝑅𝐴 + 2𝑅𝐵)𝐶 (2.5)
𝑓 =
1,44
(𝑅𝐴+2𝑅𝐵)𝐶
(2.6)
𝐷 =
𝑅𝐴+𝑅𝐵
𝑅𝐴+2𝑅𝐵
(2.7)
𝐿𝑜𝑤 − 𝑡𝑜 − ℎ𝑖𝑔ℎ 𝑟𝑎𝑡𝑖𝑜 =
𝑡𝐿
𝑡𝐻=
𝑅𝐵
𝑅𝐴+𝑅𝐵
(2.8)
Dengan:
a) tH : durasi nilai logika tinggi keluaran (second [ms])
b) tL : durasi nilai logika tinggi keluaran (second [ms])
c) f : frekuensi gelombang keluaran (Hertz [Hz])
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

16
d) T : periode gelombang keluaran (second [ms])
e) D : duty cycle
f) RA : nilai resistor1 rangkaian RC pada IC timer 555 (Ohm [Ω])
g) RB : nilai resistor2 rangkaian RC pada IC timer 555 (Ohm [Ω])
h) C : nilai kapasitor rangkaian RC pada IC timer 555 (Farad [F])
Gambar 2.12. Rangkaian Astable operation.
Gambar 2.13. Bentuk gelombang pada Astable operation (kiri) dan grafik Free-Running
Frequency vs Capacitance (kanan).
2.7. Relay[23]
Relay dalam komponen elektronika merupakan sejenis saklar yang dapat
dioperasikan secara otomatis dengan menggunakan prinsip elektromagnetik atau
mekanisme elektrik sebagai sinyal pemicu / pengaktifan relay. Berdasarkan dari sinyal
pemicunya, relay dikelompokan menjadi 2 tipe, yaitu:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

17
a. Relay elektromekanik (Electromechanical Relays / EMR)
Pada dasarnya, rangkaian relay elektromekanik terdiri dari 4 bagian utama yang
dapat dilihat pada Gambar 2.14. Selain itu, tiap bagian relay ini memiliki fungsi
sebagai berikut:
- Kerangka (Frame)
Bagian ini berfungsi sebagai bagian penampung dan penopang bagian relay
yang lain.
- Lengan (Armature)
Bagian ini merupakan bagian aktif dari relay yang berfungsi untuk
menyambung atau memutus kontak antara kontaktor pada relay. Biasanya
pada bagian ini juga disertai dengan per (spring) untuk mengembalikan
posisi lengan ketika tidak diaktifkan oleh coil.
- Coil
Bagian ini merupakan bagian rangkaian pengaktif (energizing circuit) pada
relay yang berfungsi untuk menggerakan lengan (armature) dengan
mekanisme induksi elektromagnetik.
- Kontaktor (Contacts)
Bagian ini merupakan bagian konduktif dari saklar relay yang berfungsi
untuk memutus atau menyambung rangkaian pada suatu rangkaian listrik.
Biasanya tipe kontaktor relay yang sering dijumpai di pasaran merupakan
tipe SPDT (Single Pole Double Throw) dengan konfigurasi “Break-Make”
atau “Break before Make” (ilustrasi desain dapat dilihat pada Gambar
2.15.) dimana pada tipe ini terdapat 2 posisi awalan kontaktor, yaitu:
Normally Open (NO) dan Normally Close (NC).
Gambar 2.14. Struktur relay elektromekanik.[19]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

18
Gambar 2.15. Tipe kombinasi kontaktor relay elektromekanik.[22]
Selain bagian utama, pada relay juga terdapat jenis sambungan saklar yang
didasari oleh istilah-istilah berikut:
- Break
Istilah ini digunakan untuk mengindikasikan jumlah terminal/kontaktor
pemutus yang digunakan dalam pensaklaran.
- Pole
Istilah ini digunakan untuk mengindikasikan jumlah terminal common
(input) yang digunakan dalam pensaklaran relay.
- Throw
Istilah ini digunakan untuk mengindikasikan jumlah pilihan
terminal/kontaktor yang tersedia pada tiap pole dalam pensaklaran relay.
Gambar desain dari penggunaan istilah tersebut dapat dilihat pada Gambar 2.16.
Gambar 2.16. Jenis sambungan saklar dengan istilah pole, break, throw.[21]
b. Solid State Relay (SSR)
Pada dasarnya, Solid State Relay (SSR) merupakan sejenis relay yang tidak
memiliki bagian penggerak yang aktif seperti relay elektromekanik, sehingga
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

19
dalam proses aktivasinya menggunakan level tegangan input tertentu. Relay ini
juga memiliki 2 bagian utama (detail struktur relay dapat dilihat pada Gambar
2.17.), yaitu:
- Bagian masukan (input circuit)
Bagian ini memiliki bagian pengontrol (control circuit) yang berfungsi
sebagai penghubung antara bagian masukan dengan bagian keluaran dengan
menentukan kondisi aktif (energized) atau tidak aktif (de-energized) pada
keluaran relay. Proses penentuan kondisi pada bagian kontrol dipengaruhi
oleh besar tegangan input yang diberikan (biasanya berupa sinyal/pulsa).
Ketika besar tegangan masukan melebihi batas atas pemicu (Pickup
Voltage) maka relay akan aktif (energized), dan ketika besar tegangan
masukan kurang dari batas bawah tegangan pemicu (Dropout Voltage) maka
relay akan tidak aktif (de-energized).
- Bagian keluaran (output circuit)
Bagian ini berfungsi sebagai kontaktor pada relay sehingga pada bagian ini
biasanya dihubungkan dengan rangkaian aktuator atau beban.
Gambar 2.17. Struktur Solid State Relay.[23]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
20
BAB III
RANCANGAN PENELITIAN
Pada bab ini akan dibahas rancangan sistem yang akan dibuat secara terperinci. Pada
bab ini akan dibagi 3 bagian utama, yaitu: proses kerja sistem, perancangan perangkat
keras (hardware), dan perancangan perangkat lunak (software).
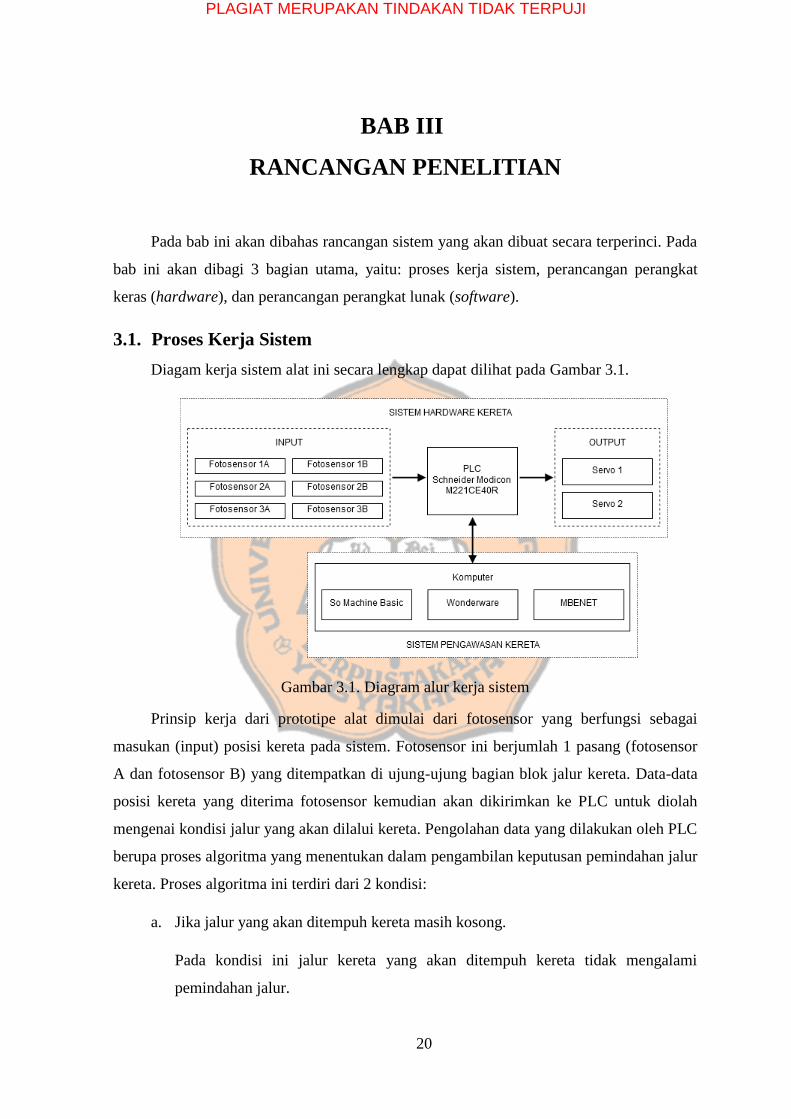
3.1. Proses Kerja Sistem
Diagam kerja sistem alat ini secara lengkap dapat dilihat pada Gambar 3.1.
Gambar 3.1. Diagram alur kerja sistem
Prinsip kerja dari prototipe alat dimulai dari fotosensor yang berfungsi sebagai
masukan (input) posisi kereta pada sistem. Fotosensor ini berjumlah 1 pasang (fotosensor
A dan fotosensor B) yang ditempatkan di ujung-ujung bagian blok jalur kereta. Data-data
posisi kereta yang diterima fotosensor kemudian akan dikirimkan ke PLC untuk diolah
mengenai kondisi jalur yang akan dilalui kereta. Pengolahan data yang dilakukan oleh PLC
berupa proses algoritma yang menentukan dalam pengambilan keputusan pemindahan jalur
kereta. Proses algoritma ini terdiri dari 2 kondisi:
a. Jika jalur yang akan ditempuh kereta masih kosong.
Pada kondisi ini jalur kereta yang akan ditempuh kereta tidak mengalami
pemindahan jalur.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

21
b. Jika jalur yang akan ditempuh kereta sudah ditempati kereta yang lain.
Pada kondisi ini jalur kereta yang akan ditempuh kereta akan dipindahkan ke
jalur yang belum ditempati kereta lain.
Berdasarkan dari hasil pengolahan algoritma tersebut. PLC akan memberikan
instruksi keluaran pada aktuator (motor servo) untuk mengubah jalur menggunakan lengan
pemindah jalur.Selain itu PLC juga akan akan memberikan data-data masukan diterima
dan data-data keluaran yang berupa data aktuator ke HMI (Wonderware) untuk keperluan
pengawasan.
3.2. Perancangan Perangkat Keras
Pada subab ini terdapat tiga pembahasan, yaitu: perancangan model sistem,
perancangan koneksi pengkabelan input/output PLC, dan perancangan skematik rangkaian
sistem. Mengenai penjelasan mendetail mengenai pembahasan tersebut akan dijelaskan
pada poin-poin berikut:
3.2.1. Perancangan Model Sistem
Perancangan model sistem yang akan dibuat dalam penelitian ini akan terbagi
menjadi dua bagian utama, yaitu: perancangan model fotosensor dan perancangan model
aktuator pengatur jalur (servo) yang akan dijelaskan lebih detail pada subab berikutnya.
Desain jalur rel pada model sistem akan terbagi dalam tiga blok jalur (I, II, III). Selain itu,
pada ujung dari ketiga blok tersebut akan dihubungkan dengan sebuah persimpangan yang
dimana pada model ini akan terdapat dua persimpangan. Illustrasi desain model penelitian
ini secara keseluruhan dapat dilihat pada Gambar 3.2.
Gambar 3.2. Desain model sistem.
Berikut merupakan arti dari simbol-simbol yang terdapat pada Gambar 3.2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

22
Tabel 3.1. Keterangan simbol desain model sistem.
Simbol Definisi
Jalur rel kereta api
Rangkaian aktuator (motor servo)
Pemancar cahaya (LED)
Sensor fotodiode
3.2.1.1. Perancangan model fotosensor
Pada perancangan ini, posisi komponen fotodioda (penerima cahaya) dan komponen
LED (pemancar cahaya) akan diposisikan secara berhadapan yang letaknya akan saling
berseberangan pada tiap ujung blok jalur rel kereta. Detail rancangan model ini dapat
dilihat pada Gambar 3.3.
Gambar 3.3. Perancangan model fotosensor dari pandangan atas (A) dan samping (B).
3.2.1.2. Perancangan model aktuator pengatur jalur kereta
Pada perancangan ini, komponen motor servo akan dilengkapi dengan lengan yang
berfungsi sebagai alat pemindah jalur kereta yang letaknya akan berada pada sisi jalur
bercabang dalam persimpangan jalur kereta api. Desain model aktuator akan memiliki dua
macam kondisi, yaitu: kondisi aktif dan non-aktif. Pada kondisi aktif, posisi lengan akan
bergerak ke posisi 30° (segaris dengan jalur rel alternatif) yang dimana akan menutup jalur
utama kereta (lihat Gambar 3.4.), sehingga kereta akan berpindah haluan ke jalur alternatif.
Pada kondisi non-aktif, posisi lengan segaris dengan jalur rel utama yang dimana akan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

23
menutupi jalur alternatif kereta (lihat Gambar 3.5.), sehingga kereta akan tetap mengikuti
jalur rel utama.
Gambar 3.4. Perancangan model aktuator pengatur jalur kereta (kondisi aktif) dari
pandangan atas (A) dan samping (B).
Gambar 3.5. Perancangan model aktuator pengatur jalur kereta (kondisi non-aktif) dari
pandangan atas (A) dan samping (B).
3.2.2. Perancangan Koneksi Pengkabelan Input/Output PLC
Perancangan koneksi pengkabelan masukan/keluaran PLC pada penelitian ini akan
menggunakan enam terminal masukan dan dua terminal keluaran. Pada terminal masukan
PLC akan dihubungkan ke bagian terminal output dari rangkaian fotosensor dan pada
terminal keluaran PLC akan dihubungkan ke rangkaian terminal rangkaian coil pada relay
yang terdapat di dalam rangkaian sistem aktuator (driver motor servo). Kode-kode alamat
terminal PLC yang akan digunakan secara detail dapat dilihat pada tabel berikut:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

24
Tabel 3.2. Rancangan pengalamatan terminal masukan PLC.
MASUKAN (INPUT)
Kode Alamat Koneksi Alat
I0.0 Fotosensor 1A
I0.1 Fotosensor 1B
I0.2 Fotosensor 2A
I0.3 Fotosensor 2B
I0.4 Fotosensor 3A
I0.5 Fotosensor 3B
Tabel 3.3. Rancangan pengalamatan terminal keluaran PLC.
KELUARAN (OUTPUT)
Kode Alamat Koneksi Alat
Q0.0 Servo 1
Q0.1 Servo 2
3.2.3. Perancangan Skematik Rangkaian Sistem
Perancangan skematik rangkaian sistem pada penelitian ini berpusat pada
perancangan desain elektronik pada sistem sensor alat (fotosensor) dan perancangan driver
aktuator (driver motor servo) dimana detail masing-masing perancangan akan dibahas pada
poin-poin berikut:
3.2.3.1. Perancangan Fotosensor
Pada perancangan ini, subsistem fotosensor akan dirancang dalam 2 bagian, yaitu:
perancangan bagian pemancar dan perancangan bagian penerima dimana masing-masing
bagian akan menggunakan tegangan catu daya (VCC) sebesar 24 volt. Hal ini dikarenakan
besar tegangan batas untuk menghasilkan nilai logika tinggi (nilai 1) pada masukan PLC
berada pada rentang 15 volt ke atas.
Mekanisme fotosensor ini diawali oleh pemancaran sinyal cahaya oleh LED yang
kemudian akan ditangkap oleh fotodioda. Ketika cahaya yang dipancarkan terhalangi oleh
suatu objek (kereta), fotosensor akan memberi sinyal masukan ke PLC.
3.2.3.1.1. Perancangan Subsistem Pemancar Fotosensor
Pada perancangan bagian subsistem pemancar, bentuk rancangan yang digunakan
berupa rangkaian seri antara resistor dan LED yang dikondisikan bias maju (forward bias)
yang dapat dilihat secara detail pada Gambar 3.6.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

25
Gambar 3.6. Rangakaian pemancar fotosensor.
Pada rangkaian ini, besar nilai resistor (R) yang akan digunakan pada nilai arus dioda
(Id) sebesar 20mA dan nilai tegangan maju dioda (Vd) sebesar 1,2V adalah sebagai berikut:
𝑅 =
𝑉𝑠 − 𝑉𝑑
𝐼𝑑=
24 − 1,2
0,02= 1,14 𝑘Ω ≅ 1,2 𝑘Ω (3.1)
3.2.3.1.2. Perancangan Subsistem Penerima Fotosensor
Pada perancangan bagian subsistem penerima, bentuk rancangan yang digunakan
merupakan jenis rangkaian penguat darlington yang dapat dilihat secara detail pada
Gambar 3.7.
Gambar 3.7. Rangkaian penerima fotosensor.
3.2.3.2. Perancangan Driver Motor Servo
Pada perancangan ini, driver motor servo menggunakan 2 IC timer (NE 555) yang
masing-masing IC nya dikonfigurasi dalam mode astable dan monostable yang terlihat
seperti Gambar 3.8.
VCC (5V) R3
220
D2
LUMILED
R13k
Q12N4400
Q22N4400
AK
D1PHOTODIODE
R210k
VCC (24V)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

26
Gambar 3.8. Rangkaian driver motor servo
Dari gambar tersebut terlihat bahwa mode timer yang digunakan memiliki fungsi
sebagai berikut:
a. Astable (rangkaian U1 pada Gambar 3.8.)
Mode ini digunakan untuk membentuk periode pulsa keluaran kontinu sebesar
20ms yang mana periode ini akan dipakai sebagai sinyal pengaktifan motor
servo.
b. Monostable (rangkaian U2 pada Gambar 3.8.)
Mode ini digunakan untuk membentuk panjang durasi pulsa sinyal tinggi pada
keluaran timer yang mana sinyal tinggi tersebut akan dipakai sebagai pengatur
posisi lengan motor servo.
Adapun rumus perhitungan (menyesuaikan dengan variable pada Gambar 3.8.) dalam
perancangan ini adalah sebagai berikut:
a. Perancangan mode timer Astable
Pada perhitungan ini, terdapat parameter yang telah ditentukan atau diketahui
terlebih dahulu seperti:
1. Nilai kapasitor (C) yang ditentukan adalah 1µF.
2. Duty cycle pulsa yang ditentukan adalah 60%.
3. Periode pulsa keluaran (T) adalah 20ms.
Kemudian nilai parameter duty cyle dimasukan ke persamaan (2.6), menjadi:
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
27
𝐷 =
𝑅𝐴+𝑅𝐵
𝑅𝐴+2𝑅𝐵 (2.6)
60% =
𝑅1+𝑅2
𝑅1+2𝑅2 (3.2)
Karena duty cycle merupakan perbandingan antara durasi pulsa tinggi (tH) dengan
periode (T), maka persamaannya menjadi:
60% =
𝑡𝐻
𝑇=
𝑡𝐻
0,02 (3.3)
𝑡𝐻 =
60
100× 0,02 = 0,012 𝑑𝑒𝑡𝑖𝑘 (3.4)
Dari hasil persamaan tersebut didapat besar durasi pulsa tinggi (tH) pada saat duty
cycle 60%, maka besar durasi pulsa rendahnya (tL) adalah
𝑡𝐿 = 𝑇 − 𝑡𝐻 = 0,02 − 0,012 = 0,008 𝑑𝑒𝑡𝑖𝑘 (3.5)
Untuk mendapatkan nilai reistor R2, maka nilai tL, C yang didapat dimasukan
dalam persamaan (2.3).
𝑡𝐿 = 0,693. 𝑅𝐵. 𝐶 (2.3)
0,008 = 0,693𝑅2(1 × 10−6) (3.6)
𝑅2 =
0,008
0,693 × (1 × 10−6)= 11,544 𝑘Ω ≅ 12 kΩ (3.7)
Untuk mendapatkan nilai resistor RA, maka nilai tH, C dan RB yang didapat
dimasukan dalam persamaan (2.2).
𝑡𝐻 = 0,693(𝑅𝐴 + 𝑅𝐵)𝐶 (2.2)
0,012 = 0,693(𝑅1 + (1,1544 × 104))(1 × 10−6) (3.8)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

28
𝑅1 =
0,012
0,693 × (1 × 10−6)− (1,1544 × 104) = 5,772 𝑘Ω ≅ 5,8 𝑘Ω (3.9)
Karena nilai R1 tidak ada di pasar, maka nilainya diganti ke nilai terdekat yaitu
5,6 kΩ.
b. Perancangan mode timer Monostable
Pada perhitungan ini, terdapat parameter yang telah ditentukan atau diketahui
terlebih dahulu seperti:
1. Nilai kapasitor (C) telah ditentukan sebesar 100nF.
2. Besar durasi waktu nilai tinggi (tw) pada susdut 0° adalah 1ms.
3. Besar durasi waktu nilai tinggi (tw) pada sudut 90° adalah 1,5ms.
Persamaan yang akan digunakan untuk mencari durasi waktu nilai tinggi (tw)
pada posisi sudut 30° adalah dengan menggunakan persamaan (3.10). Nilai x
dalam persamaan merupakan besar sudut dalam rentang 0° - 90°.
𝑡𝜃=𝑥 = 𝑡𝜃=0° + (𝑡𝜃=90° − 𝑡𝜃=0°)
𝑥
90° (3.10)
Pada sudut lengan servo 30°, durasi waktu nilai tinggi (tw) adalah sebagai berikut
𝑡𝜃=30° = 𝑡𝜃=0° + (𝑡𝜃=90° − 𝑡𝜃=0°)
30°
90° (3.11)
𝑡𝜃=30° = 1 + (1,5 − 1)
30°
90°= 1
1
6 𝑚𝑠 (3.12)
Sedangkan untuk mencari besar nilai RA pada rangkaian dapat menggunakan
persamaan (2.1). Berikut merupakan perhitungan nilai RA pada posisi lengan
servo sebagai berikut:
- Posisi lengan servo berada pada sudut 0° (pada Gambar 3.8. adalah nilai R3)
𝑅𝐴 =
1 × 10−3
1, 1 × (1 × 10−7)= 9,09 𝑘Ω ≅ 9,1 𝑘Ω (3.13)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

29
- Posisi lengan servo berada pada sudut 30° (pada Gambar 3.8. adalah nilai
R4)
𝑅𝐴 =1
1
6× 10−3
1, 1 × (1 × 10−7)10,606 𝑘Ω ≅ 11 𝑘Ω (3.14)
3.3. Perancangan Perangkat Lunak
Pada subab ini terdapat dua pembahasan, yaitu: perancangan algoritma sistem dan
perancangan tampilan antarmuka sistem. Mengenai penjelasan mendetail mengenai
pembahasan tersebut akan dijelaskan pada poin-poin berikut:
3.3.1. Perancangan Algoritma Sistem
Gambar 3.9. Diagram alur kerja perangkat lunak sistem
Secara keseluruhan perancangan algoritma perangkat lunak sistem yang penting,
terbagi menjadi 3 bagian, yaitu: proses deteksi kereta, proses pengaturan jalur, proses
pengiriman data. Pada proses awal sistem akan melakukan proses inisialisasi port dan
pengaturan komunikasipada PLC. Setelah proses inisialisasi selesai,proses deteksi kereta
akan dieksekusi. Pada tahap ini, fotosensor-fotosensor pada sistem akan aktif untuk
mendeteksi keberadaan dan arah laju kereta, beserta status blok jalur kereta pada sistem
(kosong/terisi).Data-data mengenai keberadaan kereta, arah laju kereta, dan status kondisi
blok jalur kereta akan lebih dahulu disimpan di dalam memori PLC, lalu dikirimkan ke
sistem HMI (Wonderware)untuk diproses sebagai keluaran data sistem di dalam proses
pengiriman data1.Proses pengaturan jalur kereta akan dieksekusi jika data status blok jalur
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

30
kereta memberi informasi bahwa jalur yang akan dilalui kereta telah dipakai atau
diprioritaskan (data mengenai jalur yang diprioritaskan akan dijelaskan pada tahap proses
pengiriman data2) dengan mengaktifkan motor servo di persimpangan jalur antar blok
yang akan dilalui kereta.Pada proses pengiriman data2, PLC mengirimkan data status
kondisi akses jalur kereta ke HMI (Wonderware). Untuk gambaran yang lebih jelas
mengenai mekanisme algoritma kerja sistem dapat dilihat pada Gambar 3.9.
3.3.1.1. Proses Deteksi Kereta
Gambar 3.10. Diagram alur proses deteksi kereta.
Pada proses ini, mekanisme pendeteksian kereta dimulai ketika kereta melewati
fotosensor yang berada di salah satu ujung blok jalur kereta (ujung sebelah kiri atau kanan)
yang menyebabkan sinar laser yang diarahkan pada fotosensor menjadi terhalau (sensor
ON). Kondisi fotosensor tersebut akan menjadi masukan bagi PLC untuk mengetahui arah
datangnya kereta (dari kiri/kanan) dan kondisi bahwa di blok jalur tersebut telah terisi.
Ketika kereta melewati fotosensor di ujung blok yang lain (di ujung kiri jika kereta datang
dari sebelah kanan dan sebaliknya) sampai terlepas dari deteksi fotosensor tersebut, maka
PLC akan membaca kondisi tersebut sebagai kondisi bahwa kereta sudah melewati blok
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
31
jalur tersebut (kondisi di blok jalur tersebut menjadi “kosong”). Untuk gambaran yang
lebih jelas mengenai alur proses deteksi kereta dapat dilihat pada Gambar 3.10.
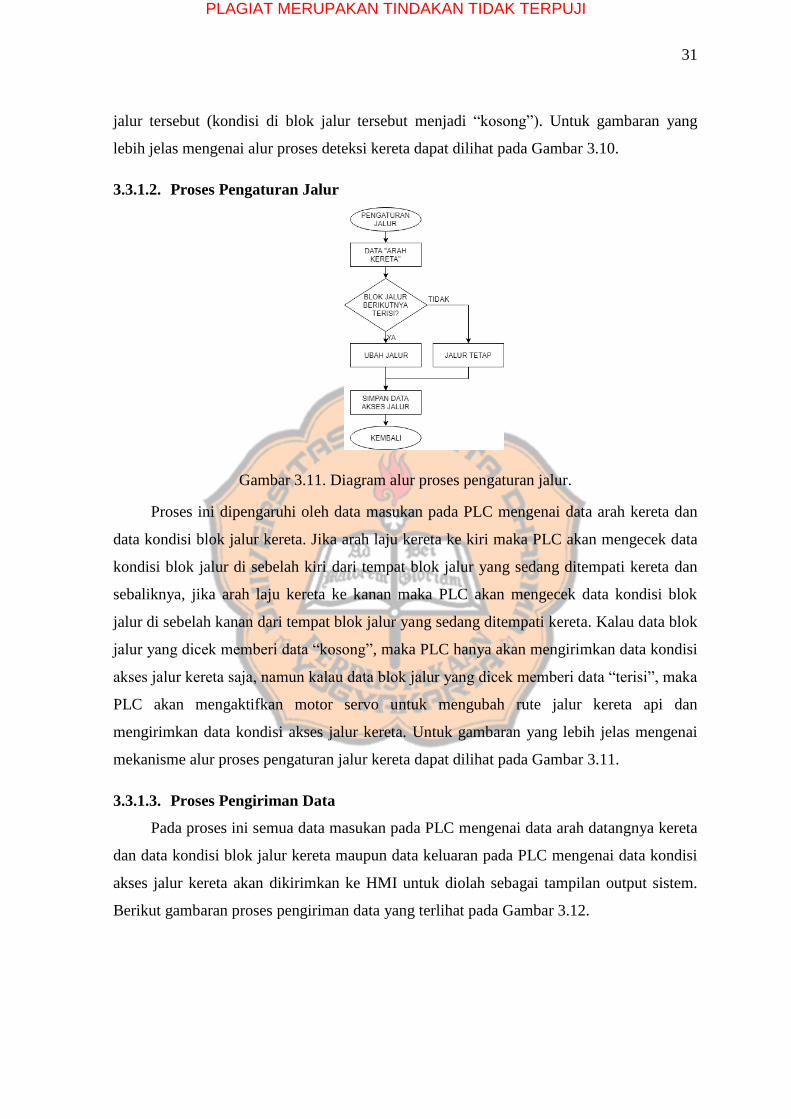
3.3.1.2. Proses Pengaturan Jalur
Gambar 3.11. Diagram alur proses pengaturan jalur.
Proses ini dipengaruhi oleh data masukan pada PLC mengenai data arah kereta dan
data kondisi blok jalur kereta. Jika arah laju kereta ke kiri maka PLC akan mengecek data
kondisi blok jalur di sebelah kiri dari tempat blok jalur yang sedang ditempati kereta dan
sebaliknya, jika arah laju kereta ke kanan maka PLC akan mengecek data kondisi blok
jalur di sebelah kanan dari tempat blok jalur yang sedang ditempati kereta. Kalau data blok
jalur yang dicek memberi data “kosong”, maka PLC hanya akan mengirimkan data kondisi
akses jalur kereta saja, namun kalau data blok jalur yang dicek memberi data “terisi”, maka
PLC akan mengaktifkan motor servo untuk mengubah rute jalur kereta api dan
mengirimkan data kondisi akses jalur kereta. Untuk gambaran yang lebih jelas mengenai
mekanisme alur proses pengaturan jalur kereta dapat dilihat pada Gambar 3.11.
3.3.1.3. Proses Pengiriman Data
Pada proses ini semua data masukan pada PLC mengenai data arah datangnya kereta
dan data kondisi blok jalur kereta maupun data keluaran pada PLC mengenai data kondisi
akses jalur kereta akan dikirimkan ke HMI untuk diolah sebagai tampilan output sistem.
Berikut gambaran proses pengiriman data yang terlihat pada Gambar 3.12.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

32
Gambar 3.12. Diagram alur proses pengiriman data.
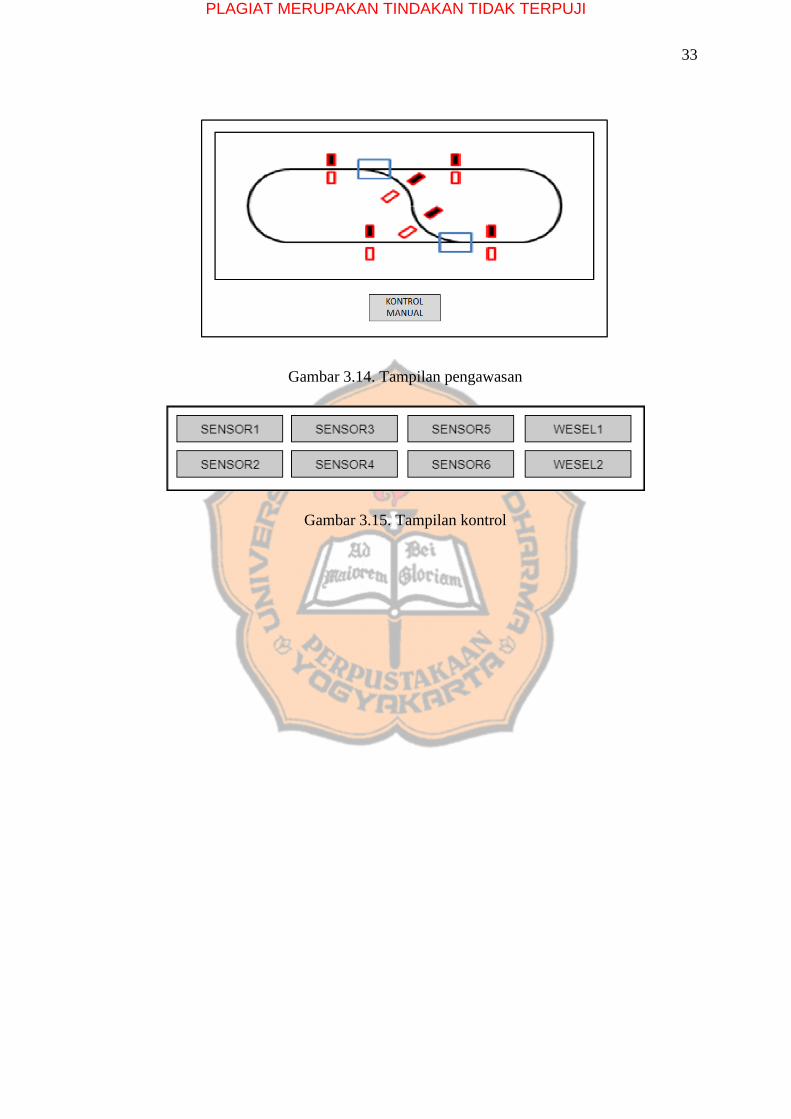
3.3.2. Perancangan Tampilan Antarmuka Sistem
Secara keseluruhan perancangan tampilan antarmuka sistem yang akan digunakan
dalam penelitian ini, terbagi menjadi 3 bagian, yaitu: tampilan menu masuk, tampilan
pengawasan, dan tampilan kontrol. Pada proses awal (inisialisasi) program antarmuka,
tampilan menu masuk akan muncul terlebih dahulu. Tampilan menu masuk merupakan
tampilan untuk login user yang dapat dilihat pada Gambar 3.13. Setelah melakukan proses
masukan (input) data pada tampilan menu masuk, tampilan antarmuka akan beralih ke
tampilan pengawasan. Tampilan pengawasan berisi tampilan gambar animasi yang
berfungsi untuk mengamati keadaan sistem yang dapat dilihat pada Gambar 3.14.
Tampilan ini juga akan disertai tampilan tombol untuk membuka tampilan menu kontrol
yang berfungsi sebagai menu input instruksi pada HMI yang mana desain dari tampilan ini
dapat dilihat pada Gambar 3.15.
Gambar 3.13. Tampilan Menu masuk
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
33
Gambar 3.14. Tampilan pengawasan
Gambar 3.15. Tampilan kontrol
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

34
BAB IV
HASIL DAN PEMBAHASAN
Pada bab ini akan membahas 3 bagian utama penelitian, yaitu: modifikasi atau
perubahan desain sistem alat yang digunakan dalam penelitian, implementasi alat, dan
catatan data hasil penelitian beserta pembahasan data hasil penelitian.
4.1. Perubahan Rancangan
Pada subab ini akan membahas tentang perubahan-perubahan rancangan yang
dilakukan selama pembuatan implementasi alat.
4.1.1. Perubahan Catu Daya Lampu LED
Desain perancangan catu daya lampu LED pada bab III yang dihubungkan pada
tegangan 24V mengalami perubahan tegangan menjadi 5 volt dikarenakan daya yang
dihasilkan pada catu bertegangan 24V adalah 323mW. Besar nilai daya tersebut melebihi
nilai disipasi daya resistor 1,5kΩ sebesar 250mW pada komponen lampu LED. Hal ini
ditandai dengan tingginya suhu resistor ketika komponen digunakan dalam jangka waktu
yang lama.
4.1.2. Perubahan Koneksi Pengkabelan Terminal Masukan PLC
Desain perancangan alamat terminal masukan PLC pada Tabel 3.2. mengalami
sedikit perubahan dikarenakan adanya penambahan masukan untuk menyalakan
(inisialisasi) yang dialamatkan pada terminal masukan I0.0 dan masukan untuk mematikan
sistem yang dialamatkan pada terminal masukan I0.1. Detail perubahan alamat terminal
masukan dapat dilihat pada Tabel 4.1.
Tabel 4.1. Implementasi pengalamatan terminal masukan PLC.
MASUKAN (INPUT)
Kode Alamat Koneksi Alat
I0.0 Pushbutton NO 1 (pada trainer PLC)
I0.1 Pushbutton NO 2 (pada trainer PLC)
I0.2 Fotosensor 1A
I0.3 Fotosensor 1B
I0.4 Fotosensor 2A
I0.5 Fotosensor 2B
I0.6 Fotosensor 3A
I0.7 Fotosensor 3B
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

35
4.1.3. Perubahan Tampilan Menu pada HMI
Desain perancangan Tampilan Menu HMI yang dijelaskan pada bab III dalam
implementasinya mengalami beberapa perubahan. Perubahan-perubahan yang diterapkan
pada tiap tampilan menu akan dijelaskan sebagai berikut:
4.1.3.1. Perubahan Tampilan Menu Masuk (Menu Login)
Implementasi desain antarmuka tampilan menu masuk terwujud dengan nama
jendela “Menu Login”. Pada dasarnya, perubahan desain yang dilakukan pada tampilan
menu ini hanyalah pengubahan tampilan kata pada jendela menu. Perbandingan desain
rancangan dengan implementasi dapat dilihat pada Tabel 4.2.
Tabel 4.2. Perbandingan desain rancangan dengan implementasi tampilan menu masuk.
Desain Rancangan Implementasi Rancangan
4.1.3.2. Perubahan Tampilan Pengawasan (Menu Utama)
Implementasi desain antarmuka tampilan pengawasan terwujud dengan nama jendela
“Menu Utama”. Perubahan desain yang dilakukan pada menu ini berupa penambahan
tampilan keterangan fungsi dan penyempurnaan gambar tampilan sistem. Perbandingan
desain rancangan dengan implementasi dapat dilihat pada Tabel 4.3.
Tabel 4.3. Perbandingan desain rancangan dengan implementasi tampilan pengawasan.
Desain Rancangan Implementasi Rancangan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

36
4.1.3.3. Perubahan Tampilan Kontrol (Menu Kontrol)
Implementasi desain antarmuka tampilan control terwujud dengan nama jendela
“Menu Kontrol”. Perubahan desain yang dilakukan pada menu ini berupa penambahan
tombol-tombol pengatur kondisi ON dan OFF sistem. Perbandingan desain rancangan
dengan implementasi dapat dilihat pada Tabel 4.4.
Tabel 4.4. Perbandingan desain rancangan dengan implementasi tampilan kontrol.
Desain Rancangan Implementasi Rancangan
4.2. Implementasi Alat
Implementasi alat yang dibuat dalam perancangan yang terlihat pada Gambar 4.1.
memiliki 2 model sistem, yaitu: model sistem fotosensor dan model sistem aktuator jalur
kereta. Implementasi dari model-model sistem tersebut akan dijelaskan pada poin subab
selanjutnya.
Gambar 4.1. Implementasi alat pengatur jalur kereta.
4.2.1. Implementasi Model Sistem Fotosensor
Implementasi model sistem fotosensor terdiri dari 2 bagian, yaitu: bagian pemancar
cahaya (komponen LED) dan bagian penerima cahaya (komponen fotodioda) dimana
secara keseluruhan dapat dilihat pada Gambar 4.2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

37
Pada implementasi komponen pemancar (komponen LED) memiliki konektor berupa
blok terminal yang berfungsi sebagai penghubung antara komponen LED dengan catu
daya. Tampilan komponen pemancar (LED) dapat dilihat pada Gambar 4.3.
Pada implementasi komponen photodiode memiliki konektor berupa blok terminal
yang berfungsi sebagai penghubung antara komponen Photodiode dengan catu daya.
Tampilan dari komponen photodiode dapat dilihat pada dan Gambar 4.4.
Gambar 4.2. Implementasi model fotosensor.
Gambar 4.3. Implementasi komponen LED.
Gambar 4.4. Implementasi komponen photodiode.
4.2.2. Implementasi Model Sistem Aktuator Jalur Kereta.
Implementasi model sistem aktuator jalur kereta pada bagian driver memiliki 3
konektor (dua blok terminal dan satu pinhead dengan 3 cabang) yang dapat dilihat pada
Gambar 4.5. dan fungsi dari konektor-konektor tersebut akan dijelaskan sebagai berikut:
a. Bagian blok terminal dengan label “SBR” akan difungsikan sebagai penghubung
antara model sistem aktuator dengan catu daya. Pada lubang blok terminal
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

38
dengan label “+” akan dihubungkan ke bagian Vcc catu daya (5 volt) sedangkan
lubang blok terminal dengan label ”-“ akan dihubungkan ke Ground catu daya.
b. Bagian blok terminal dengan label “PLC” akan difungsikan sebagai penghubung
antar model sistem aktuator dengan output PLC.
c. Bagian pinhead akan difungsikan sebagai penghubung antara model sistem
aktuator dengan motor servo. Pada bagian pin dengan label “+” (tengah) akan
dihubungkan ke kabel warna merah pada motor servo. Pada bagian pin dengan
label ”-“ (kiri) akan dihubungkan ke kabel warna cokelat pada motor servo. Pada
bagian pin dengan label “o” akan dihubungkan ke kabel warna jingga pada motor
servo.
Gambar 4.5. Komponen PCB driver aktuator jalur kereta.
Gambar 4.6. Implementasi servo pada model sistem aktuator jalur kereta.
Pada impelementasi keadaannya, logika model sistem servo terbagi menjadi logika
aktif (ON) yang memiliki besar sudut pergeseran 30° dari garis horizontal dan logika
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

39
nonaktif (OFF) yang memiliki besar sudut pergeseran 0° dari garis horizontal dengan
mekanisme sinyal aktif dari PLC bernilai rendah. Tampilan dari implementasi logika
tersebut terlihat pada Gambar 4.7. dan Gambar 4.8.
Gambar 4.7. Tampilan keadaan komponen aktuator aktif.
Gambar 4.8. Tampilan keadaan komponen aktuator nonaktif.
4.2.3. Implementasi Antarmuka Sistem
Implementasi antarmuka sistem yang dipakai dalam penelitian ini menggunakan
aplikasi Wonderware InTouch dan dilengkapi dengan fitur keamanan yang disediakan oleh
aplikasi Wonderware sendiri berupa fitur timeout logoff yang akan me-reset hak akses
pengguna jika aplikasi didiamkan selama waktu tertentu. Aplikasi antarmuka ini memliki
beberapa tahapan proses yang akan dijelaskan sebagai berikut:
a. Proses Login
Ketika aplikasi antarmuka ini dijalankan, pengguna akan terlebih dahulu
dihadapkan pada Menu Login yang tampilannya dapat dilihat pada Gambar 4.9.
Pada menu ini, pengguna diharuskan memasukkan (mengetik) ID dan password
yang dimiliki pengguna. Setelah ID dan password sudah dimasukkan, tombol
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

40
login akan aktif dan pengguna dapat mengklik tombol tersebut untuk mengakses
Menu Utama.
Gambar 4.9. Implementasi tampilan Menu Login.
b. Proses Pengawasan
Proses pengawasan sistem pada aplikasi antarmuka dilakukan di Menu Utama
yang tampilannya dapat dilihat pada Gambar 4.10.
Gambar 4.10. Implementasi tampilan Menu Utama.
Pada Menu Utama sendiri memiliki beberapa bagian penting yaitu:
1. Tombol Menu Kontrol yang berfungsi untuk menampilkan Menu Kontrol.
2. Tombol Help yang berfungsi untuk menampilkan keterangan singkat kondisi
dari gambar tampilan sistem.
3. Gambar tampilan sistem yang berfungsi menampilkan keadaan sistem saat
sistem dijalankan. Gambar tampilan ini memiliki fungsi penting dalam proses
pengawasan sistem.
c. Proses Kontrol
Proses kontrol dalam antarmuka sistem dilakukan di Menu Kontrol yang
tampilannya dapat dilihat pada Gambar 4.11.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

41
Gambar 4.11. Implementasi tampilan Menu Kontrol.
Pada Menu Kontrol terdapat tombol-tombol yang memiliki fungsi tertentu.
Penjelasan fungsi-fungsi tersebut secara mendetail terlihat pada Tabel 4.5.
Tabel 4.5. Fungsi tombol pada Menu Kontrol.
No Nama Tombol Fungsi Tombol
1 ON Memulai proses sistem (inisialisasi)
2 OFF Menghentikan proses sistem dan mereset nilai dari seluruh parameter
sistem.
3 FOTOSENSOR 1A Mengatur kondisi sinyal dari fotosensor 1A.
4 FOTOSENSOR 1B Mengatur kondisi sinyal dari fotosensor 1B.
5 FOTOSENSOR 2A Mengatur kondisi sinyal dari fotosensor 2A.
6 FOTOSENSOR 2B Mengatur kondisi sinyal dari fotosensor 2B.
7 FOTOSENSOR 3A Mengatur kondisi sinyal dari fotosensor 3A.
8 FOTOSENSOR 3B Mengatur kondisi sinyal dari fotosensor 3B.
9 WESEL 1 Mengatur kondisi sinyal dari aktuator wesel 1.
10 WESEL 2 Mengatur kondisi sinyal dari aktuator wesel 2.
11 BLOK 1 Mengatur kondisi sinyal dari parameter blok 1.
12 BLOK 2 Mengatur kondisi sinyal dari parameter blok 2.
13 BLOK 3 Mengatur kondisi sinyal dari parameter blok 3.
4.2.4. Implementasi Algoritma SoMachine Basic
Implementasi algoritma SoMachine Basic yang dipakai dalam penelitian ini berupa
diagram ladder sebagai bahasa pemrogamannya. Secara keseluruhan implementasi
algoritma ini berisi algoritma pengaturan kondisi status atau parameter sistem yang akan
digunakan dalam eksekusi proses program dan komunikasi HMI. Desain ladder dan letak
pengaplikasian pada objek penampil HMI dari algoritma-algoritma tersebut secara
mendetail dapat dilihat pada Tabel 4.6 sampai Tabel 4.10.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

42
Tabel 4.6. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian
penampil HMI.
No Nama
Algoritma Desain Ladder
Aplikasi Bagian
HMI
1
Inisialisasi
(start/stop)
sistem
2 Pengalamatan
input sensor
a. Fotosensor 1A
b. Fotosensor 1B
c. Fotosensor 2A
d. Fotosensor 2B
e. Fotosensor 3A
f. Fotosensor 3B
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

43
Tabel 4.7. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian
penampil HMI. (lanjutan)
No Nama
Algoritma Desain Ladder
Aplikasi Bagian
HMI
3
Parameter
status blok
dan arah laju
kereta
a. Blok: 1
Arah laju:
CCW
Arah laju:
CW
b. Blok: 2
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

44
Tabel 4.8. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian
penampil HMI. (lanjutan)
No Nama
Algoritma Desain Ladder
Aplikasi Bagian
HMI
Arah laju:
bawah
Arah laju:
atas
c. Blok: 3
Arah laju:
CCW
Arah laju:
CW
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

45
Tabel 4.9. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian
penampil HMI. (lanjutan)
No Nama
Algoritma Desain Ladder
Aplikasi Bagian
HMI
4 Sistem wesel
a. Wesel 1
(aktivasi)
Wesel 1
(deaktivasi)
b. Wesel 2
(aktivasi)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

46
Tabel 4.10. Bentuk diagram ladder algoritma sistem dan letak pengaplikasian
penampil HMI. (lanjutan)
No Nama
Algoritma Desain Ladder
Aplikasi Bagian
HMI
Wesel 2
(deaktivasi)
4.2.5. Implementasi Komunikasi antara PLC dan HMI
Implementasi komunikasi antara PLC dan HMI pada penelitian ini dilakukan dengan
dua cara, yaitu: mengatur alamat IP pada aplikasi SoMachine Basic dan Modicon
MODBUS Ethernet, serta membuat konfigurasi access name pada aplikasi Wonderware
InTouch. Pengaturan konfigurasi alamat IP pada tiap aplikasi akan dijelaskan sebagai
berikut:
a. Pada aplikasi SoMachine Basic
1. Buka aplikasi SoMachine Basic, pilih file project yang ingin dikonfigurasi
atau membuat file project yang baru.
2. Pada tampilan tab “Configuration”, ganti tipe PLC menjadi tipe
TM221CE40R.
3. Klik ikon konektor internet dengan nama “ETH1” atau bisa juga klik pada
bagian nama “ETH1” (pada bagian bawah tampilan tipe PLC akan berganti
menjadi menu pengaturan Ethernet).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

47
4. Pada menu pengaturan Ethernet, sesuaikan isi konfigurasi seperti pada
gambar Gambar 4.12, lalu klik tombol “Apply” (bagian bawah sebelah kanan
pada menu Ethernet).
Gambar 4.12. Tampilan konfigurasi Ethernet pada SoMachine Basic.
b. Pada aplikasi Modicon MODBUS Ethernet
1. Buka aplikasi Modicon MODBUS Ethernet.
2. Klik menu “Configure” (bagian kiri atas pada jendela aplikasi), klik pilihan
“Topic Definition…” (akan muncul jendela sesuai Gambar 4.13.)
Gambar 4.13. Tampilan jendela Topic Definition.
3. Klik tombol “New…” (akan muncul jendela “MBENET Topic Definition”),
kemudian sesuaikan isi konfigurasi seperti pada Gambar 4.14., lalu klik “OK”
(jendela “MBENET Topic Definition” akan tertutup).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

48
Gambar 4.14. Tampilan jendela MBENET Topic Definition.
4. Pada jendela “Topic Definition” (Gambar 4.13.) klik tombol “Done” (jendela
tersebut akan tertutup) dan konfigurasi pada aplikasi Modicon MODBUS
Ethernet selesai.
Proses pembuatan konfigurasi access name pada aplikasi Wonderware InTouch
dilakukan dengan cara sebagai berikut:
1. Buka aplikasi Wonderware InTouch (jendela “InTouch Application Manager”
akan terbuka).
2. Klik ganda file HMI yang ingin diberi konfigurasi access name (akan muncul
jendela seperti Gambar 4.15.), pada jendela tersebut klik tombol “Ignore” (file
HMI akan terbuka pada jendela “InTouch WindowMaker”).
Gambar 4.15. Tampilan notifikasi lisensi aplikasi Wonderware Intouch.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
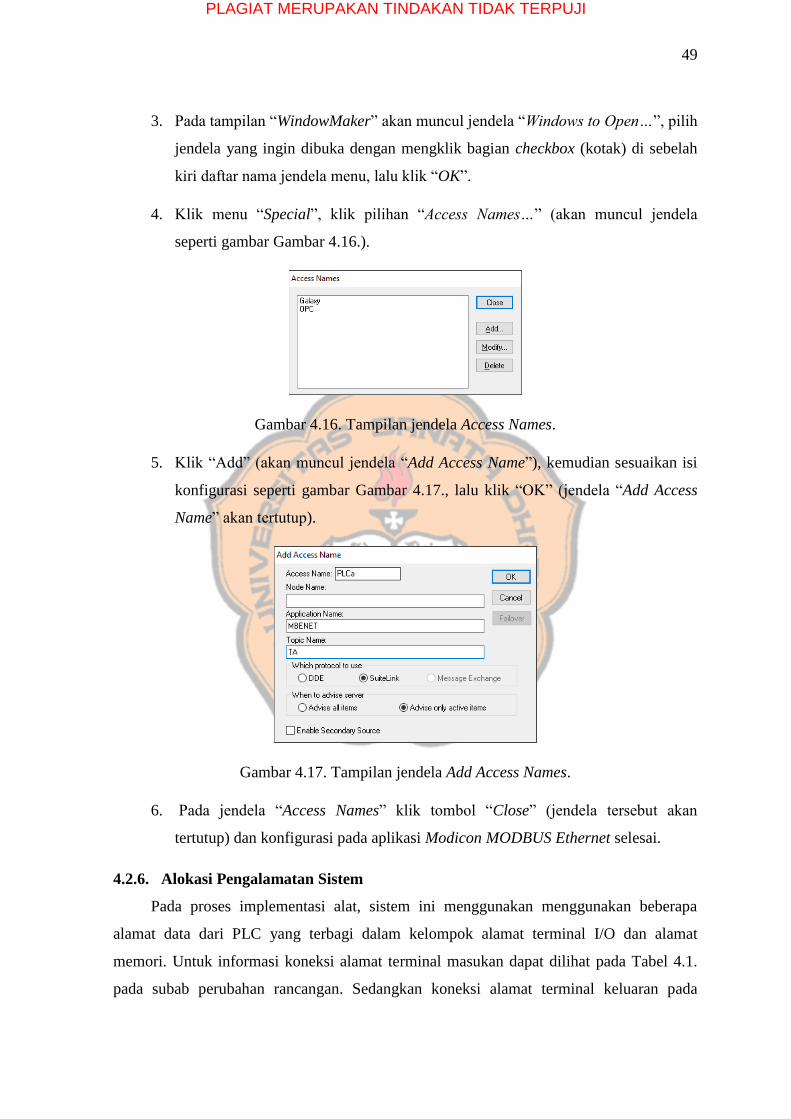
49
3. Pada tampilan “WindowMaker” akan muncul jendela “Windows to Open…”, pilih
jendela yang ingin dibuka dengan mengklik bagian checkbox (kotak) di sebelah
kiri daftar nama jendela menu, lalu klik “OK”.
4. Klik menu “Special”, klik pilihan “Access Names…” (akan muncul jendela
seperti gambar Gambar 4.16.).
Gambar 4.16. Tampilan jendela Access Names.
5. Klik “Add” (akan muncul jendela “Add Access Name”), kemudian sesuaikan isi
konfigurasi seperti gambar Gambar 4.17., lalu klik “OK” (jendela “Add Access
Name” akan tertutup).
Gambar 4.17. Tampilan jendela Add Access Names.
6. Pada jendela “Access Names” klik tombol “Close” (jendela tersebut akan
tertutup) dan konfigurasi pada aplikasi Modicon MODBUS Ethernet selesai.
4.2.6. Alokasi Pengalamatan Sistem
Pada proses implementasi alat, sistem ini menggunakan menggunakan beberapa
alamat data dari PLC yang terbagi dalam kelompok alamat terminal I/O dan alamat
memori. Untuk informasi koneksi alamat terminal masukan dapat dilihat pada Tabel 4.1.
pada subab perubahan rancangan. Sedangkan koneksi alamat terminal keluaran pada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

50
implementasi alat sistem tidak terjadi perubahan, sehingga informasi koneksi alamat
terminalnya sesuai dengan Tabel 3.3. pada subab perancangan perangkat keras. Alamat
memori yang digunakan dalam perancangan ini digunakan sebagai ruang data sistem untuk
komunikasi HMI baik data parameter kondisi sistem maupun data instruksi dari HMI
(bagian kontrol). Detail konfigurasi alamat memori yang digunakan pada PLC dan
koneksinya dengan alamat memori HMI beserta fungsinya dapa dilihat pada Tabel 4.11.
dan Tabel 4.12.
Tabel 4.11. Alokasi hubungan alamat memori PLC dan HMI beserta fungsinya.
Nama
Alamat PLC
Kode
Alamat
PLC
Nama
Alamat HMI
(Tagname)
Kode
Alamat
HMI
Fungsi
KONDISI
SISTEM M0 Sistem 000001
Sebagai parameter status keadaan sistem
(hidup/mati)
ALAMAT
SINYAL 1A M1
Sebagai parameter status keadaan fotosensor
1A
ALAMAT
SINYAL 1B M2
Sebagai parameter status keadaan fotosensor
1B
ALAMAT
SINYAL 2A M3
Sebagai parameter status keadaan fotosensor
2A
ALAMAT
SINYAL 2B M4
Sebagai parameter status keadaan fotosensor
2B
ALAMAT
SINYAL 3A M5
Sebagai parameter status keadaan fotosensor
3A
ALAMAT
SINYAL 3B M6
Sebagai parameter status keadaan fotosensor
3B
STATUS
ARAH
JALUR 1A
M7 arah_laju_1a 000008 Sebagai parameter status arah kereta ke
bawah/CCW pada blok 1
STATUS
ARAH
JALUR 1B
M8 arah_laju_1b 000009 Sebagai parameter status arah kereta ke
atas/CW pada blok 1
STATUS
ARAH
JALUR 2A
M9 arah_laju_2a 000010 Sebagai parameter status arah kereta ke
bawah pada blok 2
STATUS
ARAH
JALUR 2B
M10 arah_laju_2b 000011 Sebagai parameter status arah kereta ke atas
pada blok 2
STATUS
ARAH
JALUR 3A
M11 arah_laju_3a 000012 Sebagai parameter status arah kereta ke
atas/CCW pada blok 3
STATUS
ARAH
JALUR 3B
M12 arah_laju_3b 000013 Sebagai parameter status arah kereta ke
bawah/CW pada blok 3
STATUS
BLOK
JALUR 1
M13 blok1 000014 Sebagai parameter status keadaan blok 1
(kosong/terisi)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

51
Tabel 4.12. Alokasi hubungan alamat memori PLC dan HMI beserta fungsinya. (lanjutan)
Nama
Alamat PLC
Kode
Alamat
PLC
Nama
Alamat HMI
(Tagname)
Kode
Alamat
HMI
Fungsi
STATUS
BLOK
JALUR 2
M14 blok2 000015 Sebagai parameter status keadaan blok 2
(kosong/terisi)
STATUS
BLOK
JALUR 3
M15 blok3 000016 Sebagai parameter status keadaan blok 3
(kosong/terisi)
RESET
WESEL 1 M16
Sebagai parameter status instruksi clear
parameter wesel 1 (aktuator servo)
RESET
WESEL 2 M17
Sebagai parameter status instruksi clear
parameter wesel 1 (aktuator servo)
WESEL 1 M18 Wesel1 000019 Sebagai parameter status keadaan wesel 1
(aktuator servo)
WESEL 2 M19 Wesel2 000020 Sebagai parameter status keadaan wesel 2
(aktuator servo)
WONDER
ON M20 instruksiON 000021
Sebagai parameter status instruksi untuk
menghidupkan sistem dari HMI
WONDER
OFF M21 InstruksiOFF 000022
Sebagai parameter status instruksi untuk
mematikan sistem dari HMI
WONDER
SENSOR 1A M22 Sensor1A 000023
Sebagai parameter status instruksi fotosensor
1A (hidup/mati)
WONDER
SENSOR 1B M23 Sensor1B 000024
Sebagai parameter status instruksi fotosensor
1B (hidup/mati)
WONDER
SENSOR 2A M24 Sensor2A 000025
Sebagai parameter status instruksi fotosensor
2A (hidup/mati)
WONDER
SENSOR 2B M25 Sensor2B 000026
Sebagai parameter status instruksi fotosensor
2B (hidup/mati)
WONDER
SENSOR 3A M26 Sensor3A 000027
Sebagai parameter status instruksi fotosensor
3A (hidup/mati)
WONDER
SENSOR 3B M27 Sensor3B 000028
Sebagai parameter status instruksi fotosensor
3B (hidup/mati)
4.3. Data Hasil Pengujian Sistem dan Analisis Data
Pada subab ini terdapat 2 macam data hasil pengujian alat, yaitu: data hasil pengujian
perangkat keras alat dan data hasil pengujian perangkat lunak alat. Data-data tersebut
didapat dari proses pengamatan sistem baik secara menyeluruh (proses kerja alat) maupun
per-bagian subsistem alat (tes output sinyal subsistem alat).
4.3.1. Data Hasil Pengujian Perangkat Keras
Data hasil pengujian perangkat keras yang didapat dalam penelitian ini berupa data-
data tegangan dan arus hasil pengukuran komponen subsistem, serta tampilan keadaan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

52
sistem saat dijalankan pada kondisi tertentu. Data-data tersebut secara mendetail akan
dijelaskan pada poin berikut:
4.3.1.1. Data Pengujian Implementasi Subsistem Fotosensor
Data pengujian yang didapatkan pada implementasi subsistem fotosensor berupa
data tegangan dan arus dari tiap sensor yang diukur pada kondisi aktif (ON) dan nonaktif
(OFF) pada terminal output. Data-data tersebut dapat dilihat pada Tabel 4.13.
Tabel 4.13. Data tegangan dan arus komponen fotosensor.
No Nama Komponen Keadaan Data Komponen
Tegangan Keterangan Kondisi
1 Fotosensor 1A Terhalang 23,9V Cutoff
Tidak terhalang 90mV Saturasi
2 Fotosensor 1B Terhalang 23,9V Cutoff
Tidak terhalang 80mV Saturasi
3 Fotosensor 2A Terhalang 23,9V Cutoff
Tidak terhalang 70mV Saturasi
4 Fotosensor 2B Terhalang 23,9V Cutoff
Tidak terhalang 60mV Saturasi
5 Fotosensor 3A Terhalang 23,9V Cutoff
Tidak terhalang 50mV Saturasi
6 Fotosensor 3B Terhalang 23,9V Cutoff
Tidak terhalang 80mV Saturasi
Berdasarkan dari data yang didapat, terlihat bahwa komponen fotosensor bekerja
dengan baik, dimana nilai tegangan pada kondisi terhalang/Cutoff yang bernilai 23,9V
telah melebihi nilai tegangan pemicu logika tinggi PLC yang bernilai 15V dan nilai
tegangan pada kondisi tidak terhalang/saturasi yang bernilai kurang dari 100mV atau
berada di bawah nilai tegangan pemicu logika rendah PLC yang bernilai 5V.
4.3.1.2. Data Pengujian Implementasi Subsistem Aktuator Wesel (Servo)
Data pengujian yang didapatkan pada implementasi subsistem aktuator wesel berupa
data besar sudut yang terbentuk terhadap garis horizontal pada Gambar 4.7. dan Gambar
4.8. (warna kuning) serta tampilan keadaan dari tiap aktuator yang diukur pada kondisi
aktif (ON) dan nonaktif (OFF). Untuk data arus aktuator dapat dilihat pada Tabel 4.14.
Tabel 4.14. Data besar sudut komponen aktuator wesel (servo).
No Nama Komponen Keadaan Besar Sudut (°)
1 Wesel 1 Aktif 25
Nonaktif 0
2 Wesel 2 Aktif 25
Nonaktif 0
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

53
Berdasarkan dari perbandingan data yang didapat dengan desain perancangan,
terdapat selisih kesalahan sebesar 5° atau sebesar 17%, namun selisih tersebut tidak
berpengaruh pada kinerja sistem (komponen aktuator wesel berfungsi dengan baik).
4.3.2. Data Hasil Pengujian Perangkat Lunak
Data hasil perangkat lunak yang didapat dalam penelitian ini berupa data-data
tampilan keadaan sistem pada aplikasi SoMachine (diagram ladder), Intouch Wonderware
(tampilan keadaan HMI), serta tampilan keadaan perangkat keras sistem ketika sistem
dijalankan pada kondisi posisi awal kereta tertentu. Data-data tersebut secara mendetail
akan dijelaskan pada poin berikut:
4.3.2.1. Data Hasil Pengujian Satu Kereta
Data yang didapatkan pada pengujian satu kereta dikelompokkan berdasarkan
kondisi posisi awal kereta dan data yang diambil pada tiap percobaan didasarkan pada hasil
pengamatan yang dihasilkan pada tiap urutan proses dalam pengujian. Pada pengujian ini
didapat persentase keberhasilan sebesar 100%. Berikut ini merupakan analisis data hasil
pengujian alat pada kondisi awal kereta sebagai berikut:
4.3.2.1.1. Posisi di antara wesel 1 dan fotosensor 1A.
Berdasarkan dari data yang didapat pada Tabel L.1., terlihat bahwa sistem bekerja
dengan keberhasilan sebesar 100%, dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
4.3.2.1.2. Posisi di antara wesel 1 dan fotosensor 2A
Berdasarkan dari data yang didapat pada Tabel L.2., terlihat bahwa sistem bekerja
dengan keberhasilan sebesar 100%, dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
4.3.2.1.3. Posisi di antara wesel 1 dan fotosensor 3B
Berdasarkan dari data yang didapat pada Tabel L.3., terlihat bahwa sistem bekerja
dengan keberhasilan sebesar 100%, dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

54
4.3.2.1.4. Posisi di antara wesel 2 dan fotosensor 1B
Berdasarkan dari data yang didapat pada Tabel L.4., terlihat bahwa sistem bekerja
dengan keberhasilan sebesar 100%, dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
4.3.2.1.5. Posisi di antara wesel 2 dan fotosensor 2B
Berdasarkan dari data yang didapat pada Tabel L.5., terlihat bahwa sistem bekerja
dengan keberhasilan sebesar 100%, dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
4.3.2.1.6. Posisi di antara wesel 2 dan fotosensor 3A
Berdasarkan dari data yang didapat pada Tabel L.6., terlihat bahwa sistem bekerja
dengan keberhasilan sebesar 100%, dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
4.3.2.2. Data Hasil Pengujian Dua Kereta
Data yang didapatkan pada pengujian dua kereta dikelompokkan berdasarkan kondisi
posisi awal kereta dan data yang diambil pada tiap percobaan didasarkan pada hasil
pengamatan yang dihasilkan pada tiap urutan proses dalam pengujian. Pada pengujian ini
didapat persentase keberhasilan sebesar 47,75%. Berikut ini merupakan analisis data hasil
pengujian alat pada kondisi awal kereta sebagai berikut:
4.3.2.2.1. Posisi kereta1: antara wesel 1 dan fotosensor 1A; kereta2: antara wesel 1
dan fotosensor 3B
Berdasarkan dari data yang didapat pada Tabel L.7., terlihat bahwa sistem bekerja
dengan baik pada urutan proses 1 sampai dengan urutan proses 16 (tingkat keberhasilan
sebesar 46% dari 35 pengujian), dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi. Namun, sistem mulai
mengalami penyimpangan pada urutan proses ke 17 dimana kereta2 menerobos jalur blok
3 yang sedang dipakai oleh kereta1 (seharusnya tidak boleh dimasuki kereta yang lain),
sehingga menimbulkan ketidakcocokan dalam pembacaan proses sistem yang terlihat pada
urutan proses 20 sampai 28. Penyimpangan tersebut disebabkan karena kurangnya
alternatif jalur rel yang dapat dilalui oleh kereta. Penyimpangan yang lain juga terjadi pada
urutan proses 26, dimana proses pendeteksian kereta mengalami penyimpangan
dikarenakan menyatunya kereta1 dan kereta2 selama proses deteksi fotosensor.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

55
4.3.2.2.2. Posisi kereta1: antara wesel 2 dan fotosensor 1B; kereta2: antara wesel 2
dan fotosensor 3A
Berdasarkan dari data yang didapat pada Tabel L.8., terlihat bahwa sistem bekerja
dengan baik pada urutan proses 1 sampai dengan urutan proses 23 (tingkat keberhasilan
sebesar 64% dari 36 pengujian), dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi. Namun, sistem mulai
mengalami penyimpangan pada urutan proses ke 24 dimana kereta2 menerobos jalur blok
3 yang sedang dipakai oleh kereta1 (seharusnya tidak boleh dimasuki kereta yang lain),
sehingga menimbulkan ketidakcocokan dalam pembacaan proses sistem yang terlihat pada
urutan proses 27 sampai 36. Penyimpangan tersebut disebabkan karena kurangnya
alternatif jalur rel yang dapat dilalui oleh kereta. Penyimpangan yang lain juga terjadi pada
urutan proses 33, dimana proses pendeteksian kereta mengalami penyimpangan
dikarenakan menyatunya kereta1 dan kereta2 selama proses deteksi fotosensor.
4.3.2.2.3. Posisi kereta1: antara wesel 2 dan fotosensor 2B; kereta2: antara wesel 1
dan fotosensor 3B
Berdasarkan dari data yang didapat pada Tabel L.9., terlihat bahwa sistem bekerja
dengan baik pada urutan proses 1 sampai dengan urutan proses 12 (tingkat keberhasilan
sebesar 40% dari 30 pengujian), dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi. Namun, sistem mulai
mengalami penyimpangan pada urutan proses ke 13 dimana kereta2 menerobos jalur blok
1 yang sedang dipakai oleh kereta1 (seharusnya tidak boleh dimasuki kereta yang lain),
sehingga menimbulkan ketidakcocokan dalam pembacaan proses sistem yang terlihat pada
urutan proses 16 sampai 24. Penyimpangan tersebut disebabkan karena kurangnya
alternatif jalur rel yang dapat dilalui oleh kereta. Penyimpangan yang lain juga terjadi pada
urutan proses 21, dimana proses pendeteksian kereta mengalami penyimpangan
dikarenakan menyatunya kereta1 dan kereta2 selama proses deteksi fotosensor.
4.3.2.2.4. Posisi kereta1: antara wesel 1 dan fotosensor 2A; kereta2: antara wesel 2
dan fotosensor 1B
Berdasarkan dari data yang didapat pada Tabel L.10., terlihat bahwa sistem bekerja
dengan baik pada urutan proses 1 sampai dengan urutan proses 14 (tingkat keberhasilan
sebesar 41% dari 34 pengujian), dimana tampilan pada HMI dan keadaan nyata pada
sistem (pada jalur rel) memiliki kesamaan tampilan kondisi. Namun, sistem mulai
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

56
mengalami penyimpangan pada urutan proses ke 15 dimana kereta2 menerobos jalur blok
3 yang sedang dipakai oleh kereta1 (seharusnya tidak boleh dimasuki kereta yang lain),
sehingga menimbulkan ketidakcocokan dalam pembacaan proses sistem yang terlihat pada
urutan proses 18 sampai 27. Penyimpangan tersebut disebabkan karena kurangnya
alternatif jalur rel yang dapat dilalui oleh kereta. Penyimpangan yang lain juga terjadi pada
urutan proses 25, dimana proses pendeteksian kereta mengalami penyimpangan
dikarenakan menyatunya kereta1 dan kereta2 selama proses deteksi fotosensor.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

57
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari hasil pengujian alat yang dijelaskan pada bab empat, dalam penelitian ini dapat
disimpulkan bahwa:
1. Hasil pengujian sistem (perangkat lunak) pada kondisi satu kereta berjalan
dengan baik dengan tingkat keberhasilan 100% dimana tampilan pada HMI dan
keadaan nyata pada sistem (pada jalur rel) memiliki kesamaan tampilan kondisi.
2. Hasil pengujian sistem (perangkaat lunak) pada kondisi dua kereta berjalan
dengan kurang baik dengan tingkat keberhasilan 47,75%, dikarenakan salah satu
menerobos blok jalur yang sedang terisi oleh kereta lain sehingga menyebabkan
tampilan HMI menjadi tidak relevan dengan keadaan real.
3. Kinerja komponen fotosensor sebagai pendeteksi kereta yang lewat pada sistem
berjalan dengan baik, namun tidak dapat mendeteksi 2 kereta yang saling
menempel atau berdekatan.
4. Kinerja aktuator motor servo sebagai wesel rel pada sistem berjalan dengan baik,
meskipun memiliki kesalahan preancangan sebesar 17%.
5.2. Saran
Pada penelitian ini masih memiliki beberapa kekurangan, sehingga untuk penelitian
selanjutnya disarankan untuk:
1. Menambahkan jalur alternatif tambahan pada rangkaian rel sistem sehingga
kereta dapat menggunakan variasi rute jalur yang lain.
2. Menambahkan mekanisme untuk memberhentikan kereta secara nirkabel untuk
memberi waktu wesel untuk merubah arah rute jalur atau menunggu blok yang
akan dilalui jika dalam kondisi terisi.
3. Menambahkan mekanisme lampu persinyalan/lalu lintas kereta pada sistem
sebagai pemberitahuan kondisi jalur kereta pada jarak tertentu.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

58
DAFTAR PUSTAKA
[1] Wibowo, FillipusEdi. 2007. Pengendalian Palang Pintu Rel Kereta Api
secara Otomatis untuk Menunjang Sistem Prioritas Lampu Lalu Lintas. Tugas akhir,
Jurusan Teknik Elektro, Fakultas Sains dan Teknologi, Universitas Sanata Dharma,
Yogyakarta.
[2] Budiyanto, M dan A. wijaya. 2003. Pengenalan Dasar-Dasar PLC
(Programmable Logic Controller) Disertai Contoh Aplikasinya, Yogyakarta: Gava Media.
[3] Boltom, William. 2004. Programmable Logic Controller (PLC) Sebuah
Pengantar Edisi Ketiga. Jakarta: Penerbit Erlangga.
[4] Wicaksono, Handy. 2012. SCADA Software dengan Wonderware InTouch
Dasar-Dasar Pemrograman. Yogyakarta: Graha Ilmu.
[5] Fajar, PangestuWibowo. 2014. Power Diode, Tunnel Diode, Dan Photo
Diode. Makalah, Jurusan Teknik Elektro, Fakultas Teknik, Universitas Jenderal
Soedirman, Purbalingga.
[6] Surya, Benedictus Artha Marhaendra. 2018. Kunci Pintu Pintar Berbasis
RFID dan Biometrik dengan Sistem Pengamanan Kamera. Tugas akhir, Jurusan Teknik
Elektro, Fakultas Sains dan Teknologi, Universitas Sanata Dharma, Yogyakarta.
[7] ---,2018, Product data sheet TM221C40R Characteristics controller M221
40 IO relay, Schneider Electric.
[8] ---,2017, Modicon M221 Logic Controller Hardware Guide, Schneider
Electric.
[9] ---,2017, SoMachine Basic Operating Guide, Schneider Electric.
[10] ---,2013, LM 555 Single Timer, Fairchild.
[11] ---, 2013, 3mm Infrared LED ,T-1 SIR204C Datasheet, Everlight.
[12] Connor, Piers, 2017, Basic Railway Signalling, http://www.railway-
technical.com/signalling/infopaper-6-basic-railway.pdf, diakses 5 November 2019.
[13] ---,---,2013, Infographics: A Brief About IC 555 Timer And its Applications,
https://www.elprocus.com/brief-about-ic-555-timer/, diakses 10 Desember 2018.
[14] Kho, Dickson, ---, Mengenal IC 555 (IC Timer) dan Konfigurasi kakinya,
https://teknikelektronika.com/pengertian-mengenal-ic-555-ic-timer-konfigurasi-kaki-
ic555/, diakses 10 Desember 2018.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

59
[15] Kane, Philip. ---. How To Configure a 555 Timer IC,
https://www.jameco.com/jameco/workshop/techtip/555-timer-tutorial.html, diakses 20
Maret 2019.
[16] Kho, Dickson, ---, Pengertian LED (Light Emitting Diode) dan Cara
Kerjanya, https://teknikelektronika.com/pengertian-led-light-emitting-diode-cara-kerja/,
diakses 24 Maret 2019.
[17] ---, ---, ---, Photodiode Working Principle, Characteristics and
Applications, https://www.elprocus.com/photodiode-working-principle-applications/,
diakses 24 Maret 2019.
[18] Kho, Dickson, ---, Pengertian Photodiode (Dioda Foto) dan Prinsip
Kerjanya, https://teknikelektronika.com/pengertian-photodiode-dioda-foto-prinsip-kerja-
photodiode/, diakses 24 Maret 2019.
[19] Angga, Rida, 2015, Pengertian Relay dalam Rangkaian Elektronika,
https://skemaku.com/pengertian-relay-dalam-rangkaian-elektronika/, diakses 8 Mei 2019.
[20] ---, ---, ---, How Relays Work, https://www.galco.com/comp/prod/relay.htm,
diakses 9 Mei 2019.
[21] ---,---,---, http://electriciantraining.tpub.com/14175/css/Rotary-Switches-
136.htm, diakses 9 Mei 2019.
[22] ---,---,---, http://electriciantraining.tpub.com/14175/css/Figure-3-19-Relay-
Construction-151.htm, diakses 9 Mei 2019.
[23] ---, ---, ---, https://www.galco.com/comp/prod/relay.htm, diakses 9 Mei
2019.
[24] ---, ---, 2017, http://belajarelektronika.net/motor-servo-pengertian-fungsi-
dan-prinsip-kerjanya/, diakses 11 Februari 2018.
[25] ---, ---, ---, http://www.railway-technical.com/signalling/, diakses 5
November 2019.
[26] ---, ---, ---, http://www.railway-technical.com/signalling/route-
signalling.html, diakses 5 November 2019.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-1
LAMPIRAN
Lampiran 1. Cara penggunaan alat
1. Persiapan alat
a. Hubungkan kabel Ethernet (RJ45) pada port Ethernet PLC dan komputer.
(lihat Gambar L.1.)
Gambar L.1. koneksi Ethernet antara PLC TM221CE40R dengan komputer.
b. Hubungkan kabel adapter atau catu daya alat ke sumber listrik AC, lalu
menyalakan saklar (Gambar L.2.) pada modul PLC.
Gambar L.2. Tombol modul PLC.
c. Buka aplikasi Wonderware InTouch (HMI), SoMachine Basic, dan Modicon
MODBUS Ethernet.
d. Saat membuka aplikasi Modicon MODBUS Ethernet akan muncul beberapa
notifikasi, pada notifikasi 1 (Gambar L.3.) klik OK, pada notifikasi 2
(Gambar L.4.) klik “Ignore”, pada notifikasi 3 (Gambar L.5.) klik OK.
(aplikasi tersebut akan bekerja)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-2
Gambar L.3. Tampilan notifikasi 1.
Gambar L.4. Tampilan notifikasi 2.
Gambar L.5. Tampilan notifikasi 3.
e. Pada aplikasi SoMachine Basic, klik file “program PLC r4-2.smbp”, lalu klik
tab “Commissioning”, lalu pilih alamat IP yang tersedia (Gambar L.6.),
kemudian klik tombol “Login”.
Gambar L.6. Tampilan daftar alamat IP.
f. Pada aplikasi Wonderware InTouch, klik ganda file “GUI kereta” dari daftar
(akan muncul jendela seperti Gambar 4.15.), pada jendela tersebut klik
tombol “Ignore” (file HMI akan terbuka pada jendela “InTouch
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-3
WindowMaker”), kemudian klik menu “Runtime” (bagian kanan atas) untuk
menampilkan tampilan HMI.
2. Menjalankan/mematikan proses alat
a. Dengan menekan tombol ON pada modul PLC yang terlihat pada Gambar
L.7. (dari perangkat keras) atau mengklik tombol “MENU KONTROL” (jika
jendela “Menu Kontrol” belum muncul), lalu klik tombol “ON” (dari
program HMI) untuk mengaktifkan sistem.
Gambar L.7. Tombol ON/OFF sistem pada PLC.
b. Meletakan kereta yang sudah menyala pada rel (disarankan peletakan kereta
seperti pada tampilan posisi awal dari data percobaan untuk melihat kinerja
sistem dengan lebih baik).
c. Untuk mematikan kinerja sistem, tekan tombol OFF pada modul PLC yang
terlihat pada Gambar L.7. (dari perangkat keras) atau mengklik tombol
“OFF” pada jendela “Menu Kontrol”.
Lampiran 2. Daftar keterangan pada tampilan Menu Utama HMI.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-4
Lampiran 3. Daftar program ladder
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
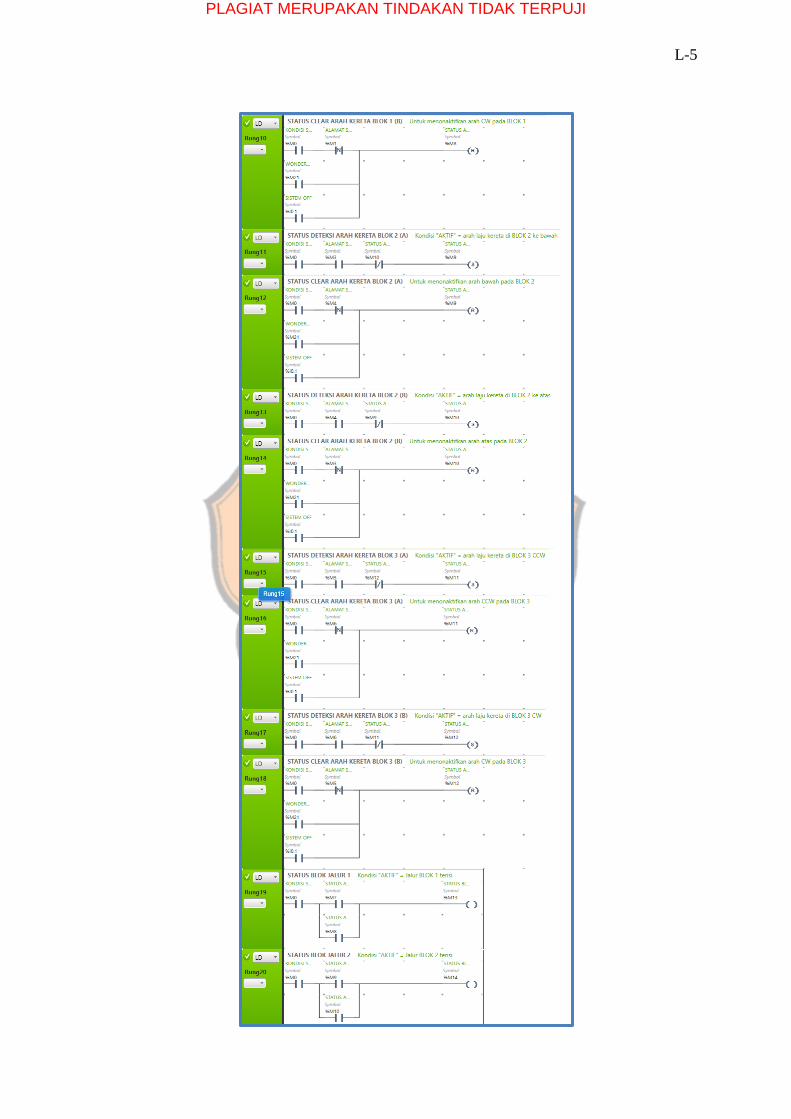
L-5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-7
Lampiran 4. Daftar program Wonderware
1. Application Script
2. Window script
3. Action script dan effect lain
Keterangan : tabel warna jingga = tagname, tabel warna kuning = konfigurasi.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-8
a. Pada Menu Login
No Objek Gambar Action Script Efek Lain
Tagname/
Konfigurasi (Efek
Lain)
1
Disable
(miscellaneo
us)
$AccessLevel==999
9
Disabled state: OFF
2 (bagian atas)
- String (value
display)
$OperatorEntered
3 (bagian bawah)
- $PasswordEntered
4 (bagian atas)
-
String (user
input)
$OperatorEntered
Keypad?: NO
Echo characters?:
YES
Input Only:
CHECKED
5 (bagian bawah)
-
$PasswordEntered
Keypad?: NO
Echo characters?:
YES
Input Only:
CHECKED
b. Pada Menu Utama
No Objek Gambar Action Script Efek Lain
Tagname/
Konfigurasi (Efek
Lain)
1
(bagian lampu)
- Light wizard
Sistem
Fill color (OFF):
RED
Fill color (ON):
GREEN
2
(bagian lingkaran)
-
Discrete (fill
color)
Sensor1A
Colors (ON):
GREEN
Colors (OFF): RED
3
(bagian lingkaran)
-
Sensor1B
Colors (ON):
GREEN
Colors (OFF): RED
4 (bagian lingkaran)
-
Sensor2A
Colors (ON):
GREEN
Colors (OFF): RED
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-9
No Objek Gambar Action Script Efek Lain
Tagname/
Konfigurasi (Efek
Lain)
5 (bagian lingkaran)
-
Discrete (fill
color)
Sensor2B
Colors (ON):
GREEN
Colors (OFF): RED
6
(bagian lingkaran)
-
Sensor3A
Colors (ON):
GREEN
Colors (OFF): RED
7
(bagian lingkaran)
-
Sensor3B
Colors (ON):
GREEN
Colors (OFF): RED
8
(bagian kiri)
-
Visibility
(miscellaneo
us)
arah_laju_1b
Visible state: ON
9
(bagian kiri)
-
arah_laju_1a
Visible state: ON
10
(bagian tengah)
-
arah_laju_2b
Visible state: ON
11
(bagian tengah)
-
arah_laju_2a
Visible state: ON
12
(bagian kanan)
-
arah_laju_3a
Visible state: ON
13
(bagian kanan)
-
arah_laju_3b
Visible state: ON
14 ,
(bagian atas),
(bagian garis merah)
-
Wesel1
(garis diagonal)
Visible state: ON
(garis horizontal)
Visible state: OFF
15 ,
(bagian bawah),
(bagian garis merah)
-
Wesel2
(garis diagonal)
Visible state: ON
(garis horizontal)
Visible state: OFF
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-10
No Objek Gambar Action Script Efek Lain
Tagname/
Konfigurasi (Efek
Lain)
16
(jalur bagian kiri)
- Discrete (fill
color)
blok1
Colors (ON): RED
Colors (OFF):
GREEN
17
(jalur bagian tengah)
-
Discrete (fill
color)
blok2
Colors (ON): RED
Colors (OFF):
GREEN
18
(jalur bagian kanan)
-
blok3
Colors (ON): RED
Colors (OFF):
GREEN
19
Disable
(miscellaneo
us)
Control
Disabled state: ON
20
Visibility
(miscellaneo
us)
(help AND
help1)==0
Visible state: ON
21
(help OR help1)==1
Visible state: ON
22
-
Help
Visible state: ON
23
-
help1
Visible state: ON
24
help1
Visible state: ON
25
Help
Visible state: ON
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-11
c. Pada Menu Kontrol
No Objek Gambar Action Script Efek Lain Tagname/ Konfigurasi
(Efek Lain)
1
-
Discrete value
(touch pushbuttons)
InstruksiON
Action: DIRECT
2
- InstruksiOFF
Action: DIRECT
3
- Instruksi_sensor1A
Action: TOGGLE
4
- Instruksi_sensor1B
Action: TOGGLE
5
- Instruksi_sensor2A
Action: TOGGLE
6
- Instruksi_sensor2B
Action: TOGGLE
7
- Instruksi_sensor3A
Action: TOGGLE
8
- Instruksi_sensor3A
Action: TOGGLE
9
- Wesel1
Action: TOGGLE
10
- Wesel2
Action: TOGGLE
Lampiran 5. Data hasil pengujian sistem
1. Kondisi satu kereta.
a. Posisi di antara wesel 1 dan fotosensor 1A.
Tabel L.1. Data percobaan 1 posisi kereta di antara wesel 1 dan fotosensor 1A.
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-12
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
1
2
3
4
5
6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-13
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
7
8
b. Posisi di antara wesel 1 dan fotosensor 2A.
Tabel L.2. Data percobaan 1 posisi kereta di antara wesel 1 dan fotosensor 2A.
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
2
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-14
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
3
4
5
6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-15
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
7
8
9
10
11
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-16
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
11
12
13
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-17
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
14
15
16
c. Posisi di antara wesel 1 dan fotosensor 3B.
Tabel L.3. Data percobaan 1 posisi kereta di antara wesel 1 dan fotosensor 3B.
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-18
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
2
3
4
5
6
7
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-19
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
8
d. Posisi di antara wesel 2 dan fotosensor 1B.
Tabel L.4. Data percobaan 1 posisi kereta di antara wesel 2 dan fotosensor 1B.
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
2
3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-20
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
4
5
6
7
8
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-21
e. Posisi di antara wesel 2 dan fotosensor 2B.
Tabel L.5. Data percobaan 1 posisi kereta di antara wesel 2 dan fotosensor 2B.
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
2
3
4
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-22
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
4
5
6
7
8
9
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-23
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
10
11
12
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-24
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
13
14
15
16
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-25
f. Posisi di antara wesel 2 dan fotosensor 3A.
Tabel L.6. Data percobaan 1 posisi kereta di antara wesel 2 dan fotosensor 3A.
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
2
3
4
5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-26
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
6
7
8
2. Kondisi dua kereta.
a. Posisi kereta1: antara wesel 1 dan fotosensor 1A; kereta2: antara wesel 1 dan
fotosensor 3B.
Tabel L.7. Data percobaan 1 posisi kereta1 (wesel 1 ke blok 1) dan kereta2 (wesel 1 ke
blok 3).
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-27
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
2
3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-28
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
3
4
5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-29
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
6
7
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-30
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
7
8
9
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-31
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
9
10
11
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-32
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
12
13
14
15
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-33
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
15
16
17
18
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-34
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
18
19
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-35
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
20
21
22
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-36
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
23
24
25
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-37
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
26
27
28
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-38
29
30
31
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-39
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
32
33
34
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-40
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
35
b. Posisi kereta1: antara wesel 2 dan fotosensor 1B; kereta2: antara wesel 2 dan
fotosensor 3A.
Tabel L.8. Data percobaan 1 posisi kereta1 (wesel 2 ke blok 1) dan kereta2 (wesel 2 ke
blok 3).
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-41
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
2
3
4
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-42
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
4
5
6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-43
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
6
7
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-44
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
8
9
10
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-45
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
11
12
13
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-46
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
14
15
16
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-47
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
17
18
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-48
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
19
20
21
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-49
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
22
23
24
25
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-50
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
26
27
28
29
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-51
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
29
30
31
32
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-52
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
32
33
34
35
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-53
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
35
36
c. Posisi kereta1: antara wesel 1 dan fotosensor 2B; kereta2: antara wesel 1 dan
fotosensor 3B.
Tabel L.9. Data percobaan 1 posisi kereta1 (wesel 2 ke blok 2) dan kereta2 (wesel 1 ke
blok 3).
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-54
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
1
2
3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-55
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
4
5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-56
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
6
7
8
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-57
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
8
9
10
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-58
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
10
11
12
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-59
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
12
13
14
15
16
17
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-60
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
17
18
19
20
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-61
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
21
22
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-62
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
22
23
24
25
26
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-63
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
27
28
29
30
d. Posisi kereta1: antara wesel 1 dan fotosensor 2A; kereta2: antara wesel 1 dan
fotosensor 1B.
Tabel L.10. Data percobaan 1 posisi kereta1 (wesel 1 ke blok 2) dan kereta2 (wesel 2 ke
blok 1).
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-64
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
0
(posisi
awal)
1
2
3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-65
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
4
5
6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-66
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
6
7
8
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
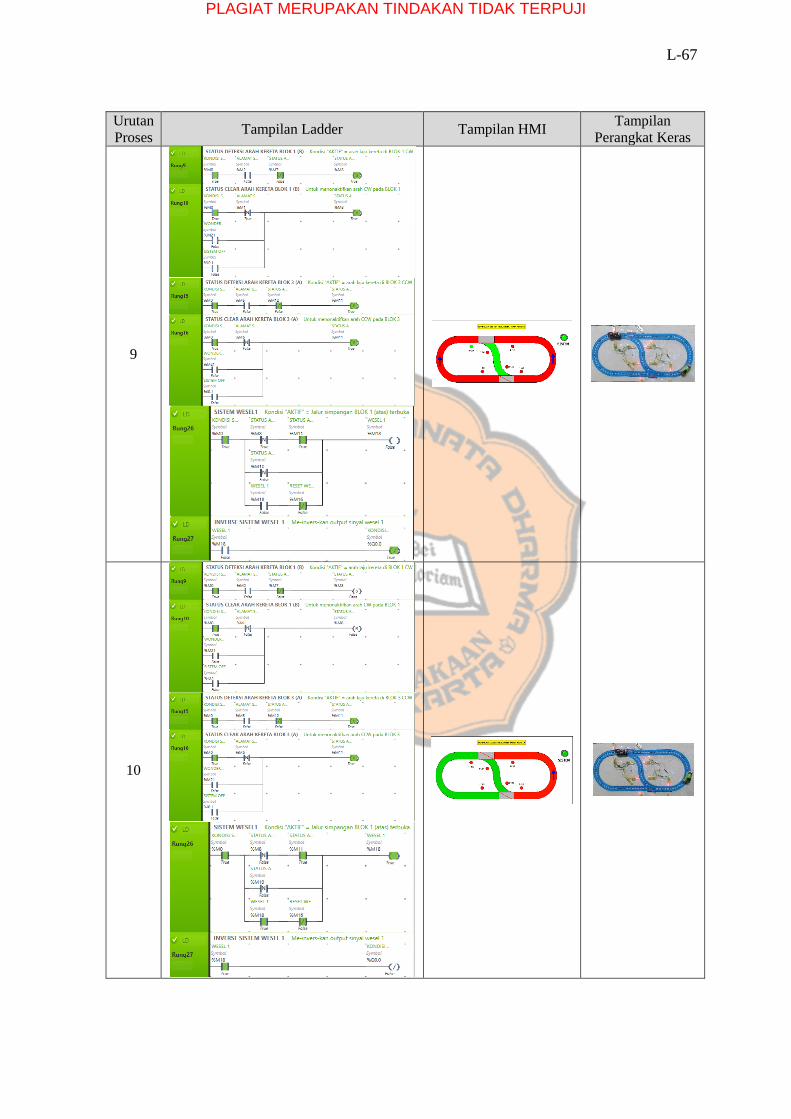
L-67
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
9
10
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-68
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
11
12
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-69
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
12
13
14
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-70
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
14
15
16
17
18
19
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-71
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
20
21
22
23
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-72
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
23
24
25
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-73
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
25
26
27
28
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L-74
Urutan
Proses Tampilan Ladder Tampilan HMI
Tampilan
Perangkat Keras
29
30
31
32
33
34
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI