Protein Structure Prediction by Protein Alignments · Protein structure is usually described at...
88
Protein Structure Prediction by Protein Alignments By Jianzhu Ma Submitted to: Toyota Technological Institute at Chicago 6045 S. Kenwood Ave, Chicago, IL, 60637 September 2015 For the degree of Doctor of Philosophy 1n Computer Science Thesis Committee: Jinbo Xu (Thesis Supervisor) Tobin Sosnick Karen Livescu Matthew Walter 1 Signature: -J ),7 Dat e:V _CCl'ft ' W/ l-· Signature: -· '/ f h..6 Date: C. ' t 'f' -:1.. u 1 <:.. ;.{ d · Date: 0.::...-+ck...r 1 15 - Signature: ........_.........,_..., . t3 J OZ.C!.lS.
Transcript of Protein Structure Prediction by Protein Alignments · Protein structure is usually described at...

Protein Structure Prediction by Protein Alignments
By
Jianzhu Ma
Submitted to: Toyota Technological Institute at Chicago
6045 S. Kenwood Ave, Chicago, IL, 60637
September 2015
For the degree of Doctor of Philosophy 1n Computer Science
Thesis Committee:
Jinbo Xu (Thesis Supervisor) Tobin Sosnick Karen Livescu Matthew Walter
1
Signature: - J ),7 Date:V _CCl'ft 'W/l-· Signature:-· '/ f h..6 Date: C. ' t 'f' -:1.. u1 <:..;.{d ·
Signature:~ Date: 0.::...-+ck...r r~ 1 2~ 15-
Signature: ........_.........,_..., . ......:>~Date: ~~·h,.,,_ ~ t3 J OZ.C!.lS.

1
Abstract
Proteins are the basic building blocks of life. They form the basis of hormones,
which regulate metabolism, structures such as hair, wool, muscle, and antibodies.
In the form of enzymes, they are behind all chemical reactions in the body. They
also help our body fight infections, turn food into energy, copy DNA and
catalyze chemical reactions. In fact, 60% of the average human body is water and
17% is proteins.
Proteins usually perform their functions by folding to a particular structure.
Understanding the folding process could help the researchers to understand the
functions of proteins and could also help to develop supplemental proteins for
people with deficiencies and gain more insight into diseases associated with
troublesome folding proteins. A lot of efforts have been devoted to develop the
experimental methods to determine the structure 3D structure of proteins, such
as X-ray crystallography and NMR spectroscopy. However, experimental
methods are both expensive and time consuming.
In this thesis I try to introduce a new machine learning template protein
structure prediction problem to predict the protein structure. The new method
improves the performance from two directions: creating accurate protein
alignments and predicting accurate protein contacts.
For the first direction, the thesis presents an alignment framework MRFalign
which goes beyond state-of-the-art methods and uses Markov Random Fields
(MRFs) to model a protein family and align two proteins by aligning two MRFs
together. Compared to other methods, that can only model local-range residue
correlation, MRFs can model long-range residue interactions (e.g., residue co-
evolution) and thus, encodes global information in a protein. MRFalign
formulizes the problem as an integer programming problem and use an
Alternative Direction Method of Multipliers (ADMM) algorithm to quickly find a
suboptimal alignment of two MRFs.
For the second direction, the thesis presents a Group Graphical Lasso (GGL)
method for contact prediction that integrates joint multi-family Evolutionary
Coupling (EC) analysis and supervised learning to improve accuracy on proteins
without many sequence homologs. Different from existing single-family EC
analysis that uses residue co-evolution information in only the target protein
family, our joint EC analysis uses residue co-evolution in both the target family
and its related families, which may have divergent sequences but similar folds.

2
Our GGL method can also integrate supervised learning methods to further
improve accuracy.
We evaluate the performance of both methods including each of its components
on large public benchmarks. Experiments show that our methods can achieve
better accuracy than existing state-of-the-art methods under all the
measurements on most of the protein classes.

3
Acknowledgements
First, let me thank my adviser Jinbo Xu for guiding me through my graduate
studies. He has been encouraging and supportive of my research from beginning
to end. I can’t remember how many times I went into his office with nearly every
crazy idea and he listened to me patiently and helped me formalize them into
concrete directions to pursue. He has tremendous insight into what approaches
will succeed. He also shaped my view of looking at things and taught me the real
spirit of research, which I believe will be beneficiary to my whole life, and that I
will cherish forever.
I would like to thank my committee members Tobin Sosnick, Karen Livescu and
Matthew Walter for all their support and suggestions. My heartfelt thanks are
also dedicated to all the professors from TTI-C and University of Chicago who
have taught me, David McAllester, John Lafferty, Nati Srebro, Julia Chuzhoy,
Karen Livescu, Greg Shakhnanovich, Yury Makarychev, Aly Khan, Qixing
Huang, Shi Li, Hammad Naveed, Stefan Canzar, for their encouraging and
sharing their plethora of knowledge on various subjects and courses. I also thank
many other professors and colleagues who had left TTI-C, Tamir Hazan, Raquel
Urtasun, Yang Shen and Dhruv Batra.
During the 5 years in TTI-C, I have made lots of friends. I thank for their
friendship and constantly support: Jian Peng, Sheng Wang, Hao Tang, Karthik
Sridharan, Andrew Cotter, Zhiyong Wang, Avleen Bijral, Payman Yadollahpour,
Siqi Sun, Qingming Tang, Lifu Tu, Jian Yao, Xing Xu and Somaye Hashemifar.
Thank you for your good company and support.
I also thank all the Administrative Staff of TTI-C for helping deal with lots of
personal staffs: Chrissy Novak, Anna Ruffolo, Adam Bohlander and Liv Leader.
Sorry for giving you so much trouble and thank you for always being so patient
to me.
Finally, my biggest thanks go to my loving and supportive family. This thesis is
dedicated to my beloved wife, Chao Yue. Thank you for sharing this journey
with me. It was because of you that my work becomes meaningful.

4
Contents Abstract ......................................................................................................................................................................... 1 Acknowledgements .................................................................................................................................................. 3 Chapter 1 Introduction ........................................................................................................................................... 5 Chapter 2 Protein structure and protein alignment ................................................................................ 8
2.1 Protein Structure .................................................................................................................................................. 8 2.2 Protein Alignment Methods ........................................................................................................................... 9
Chapter 3. Protein Alignment by Using Markov Random Fields ........................................................ 14 3.1 Introduction ........................................................................................................................................................ 14 3.2 Methods................................................................................................................................................................. 15 3.3 Results ................................................................................................................................................................... 23 3.4 Discussion ............................................................................................................................................................ 31
Chapter 4 A Conditional Neural Fields Model for Protein Alignment............................................ 32 4.1 Introduction ........................................................................................................................................................ 32 4.2 Methods................................................................................................................................................................. 34 4.3 Results ................................................................................................................................................................... 41 4.4 Conclusion ............................................................................................................................................................ 47
Chapter 5 Protein Alignments Using Context-Specific Potential ..................................................... 49 5.1 Introduction ........................................................................................................................................................ 49 5.2 Methods................................................................................................................................................................. 50 5.3 Results ................................................................................................................................................................... 53 5.4 Conclusion ............................................................................................................................................................ 62
Chapter 6 Protein Contact Prediction by Integrating Joint Evolutionary Coupling Analysis and Supervised Learning .................................................................................................................................... 63
6.1 Introduction ........................................................................................................................................................ 63 6.2 Methods................................................................................................................................................................. 65 6.3 Results ................................................................................................................................................................... 74 6.4 Discussion ........................................................................................................................................................... 80
Chapter 7 Conclusion and Future Work ..................................................................................................... 81 Reference .................................................................................................................................................................. 84

5
Chapter 1 Introduction
In a cell, proteins carry out various types of biological functions by folding into
particular 3D structures. Thus, elucidating a protein’s structure is the key to
understanding its function, which in turn is essential for any further related
biological, medical, or pharmaceutical applications. Currently, experimental
determination of a protein structure is still expensive, labor intensive and time
consuming. The gap between the number of available protein sequences and the
number of proteins with experimentally determined structures is still large.
Fortunately, computational methods for predicting protein structures can
partially solve this problem and provide biologists with valuable information on
the proteins they are interested in. Among all these computational methods,
different statistical machine learning methods have been proposed over the years
and have significantly contributed to advancing the state-of-the-art in protein
structure prediction.
There are two major approaches to predict the structure of a protein, 1)
Template-based Modeling (also called comparative modeling or protein
threading) and 2) Template-Free modeling (also called ab initio modeling or free
folding). Template-based modeling methods use the previously determined
protein crystal structures similar to the query protein to predict the structure for
it. This technique is based on the fact that proteins with similar sequences or
evolutionary traces tend to have similar structures. Template-free modeling
seeks to predict the structure of a protein from the protein sequence alone by
minimizing a particular kind of energy function. It is based on the belief that the
native structures of most proteins correspond to the ones with the lowest free
energy. When homologous templates can be found, template-based method are
more reliable compared to template-free method. In this thesis we will mainly
focus on template-based modeling, although some of the techniques for contact
prediction may also help the template-free method.
Template-based modeling has three steps, as shown in Figure 1: 1) Align the
query protein to each of the protein in the template database; 2) Select one or
several templates based on the evolutionary and structural features calculated
from the corresponding alignments; 3) Build 3D structures for the target protein
considering the constraints provided by the aligned regions while at the same
time minimizing a particular energy of the unaligned loop regions and add side-
chain atoms. The last two steps can be merged into a single procedure since one
could select the templates based on the quality of recovered 3D structure. The
bottleneck of template-based modeling following these steps is the accuracy of

6
alignments. Both template selection and 3D structure recovery rely on accurate
alignment between target protein and templates. Most popular template
selection methods use features from each aligned and unaligned position from
the given alignments and used them for their own ranking functions. The quality
of the alignments will consequently influence the quality of the features they
fetched. In the 3D structure recovery, the modeling software will take the
alignments as constraints to restrict the optimization of their own energy
function. An incorrect alignment might lead to the optimization to a completely
wrong conformation space. Therefore, improving the alignment quality will help
both of these tasks in template-based modeling. In this thesis, I will focus on
developing new probabilistic graphical models for protein alignment including
both new energy functions and new structures.
Figure 1. Pipeline for template-based modeling for protein structure prediction.
In a machine learning perspective, protein alignment can be treated as a
structured prediction problem with the goal to predict the alignment state for
each pair of the residues from the two proteins to be aligned. The alignment state
for a pair of residue is related to their local features. For example, if residues 𝑖
and 𝑗 on two proteins have the same amino acid type, similar mutation
frequency and secondary structure type, then they are more likely to be aligned
together. The alignment states are not independent with each other. For example,
the alignment state of residues 𝑖 and 𝑗 depends on the alignment states of their
adjacent residues. Similar as other structured learning problem, the key point of
solving this problem is to design a computational model that can well capture
both of these two dependencies. In order to capture the first dependency, we
need to design a new scoring function that is expressive enough to model the
complex relationship between features and alignment states. For the second

7
dependency, we need to design a graphical model with new graph structure
with new training and inference methods.
The thesis is organized as follows: in Chapter 2, I will introduce the background
knowledge of protein structures and various protein alignment approaches. In
Chapter 3, I will describe a new graphical model-based protein alignment
method, which can be applied to solving both protein homology detection and
protein threading. In Chapter 4, I will introduce a novel alignment scoring
function that can capture the complex relationship between the protein features
and alignment states. In Chapter 5, I will introduce a novel protein alignment
potential function. In Chapter 6, I will introduce a new contact prediction
approach that can be treated as a new feature used in our alignment framework.
In Chapter 7, I will conclude the thesis and discuss the future work.

8
Chapter 2 Protein structure and
protein alignment
2.1 Protein Structure
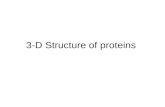
Protein structure is usually described at four different levels as shown in Figure 2.
Each of the lower levels can be treated as the building blocks of the higher level.
The hierarchical structure of proteins is very important for prediction. The lower
level structure is usually much easier to predict compared to the higher level and
we can therefore predict the overall 3D structure from bottom-up.
The first level, called the primary sequence, is a linear sequence of the amino
acids in the chain. Different primary structures correspond to different sequences
in which the amino acids are covalently linked together. Amino acids are organic
compounds composed of amine (-NH2) and carboxylic acid (-COOH) functional
groups, along with a side-chain specific to each amino acid. There are 20 types of
standard amino acids altogether. During a protein folding process, amino acids
are connected by the chemical bonds through a reaction of their respective
carboxyl and amino groups. These bonds are called peptide bonds and the amino
acids linked by the peptide bonds are called peptides, or residues.
The second level, called the secondary structure, has two common patterns of
structural repetition in proteins: the coiling up of segments of the chain named α-
helix, and the pairing together of strands of the chain named β-sheet. These two
structures are more conserved compared to other regions, which are usually
referred to as coil or loop. The coil region is important for maintaining the
flexibility and binding affinity when the protein interacts with others. Instead of
using this definition, Sander grouped the secondary structure into eight classes
(Kabsch and Sander, 1983). This classification is a finer-grained model of the 3-
classes one and contains more useful information, such as the difference between
3-helix and 4-helix.
The tertiary structure is the next higher level of organization. It is defined as the
set of 3D coordinates for each atoms of the protein. The folding of the
polypeptide chain assembles different secondary structure elements in a
particular arrangement. As helices and sheets are units of secondary structure,
the domain is the unit of tertiary structure that is a conserved part of a given

9
protein sequence and (tertiary) structure that can evolve, function, and exist
independently of the rest of the protein chain. In multi-domain proteins, tertiary
structure includes the arrangement of domains relative to each other as well as
that of the chain within each domain.
The quaternary structure describes how different polypeptide chains are
assembled into complexes.
Figure 2. Different layers of protein structures.
2.2 Protein Alignment Methods
As mentioned in the previous section, the most reliable protein structure
prediction method is template-based method. Its bottleneck is the quality of
protein alignments. According to the features of proteins used for different
methods under study, alignment-based methods can be grouped into three
categories: sequence-based alignment methods, profile-based alignment methods

10
and structure-based methods. Generally speaking, sequence-based alignment
methods are less sensitive than profile-based alignment methods, which in turn
are less sensitive than structure-based alignment methods. However, sequence-
based methods are more specific than profile-based alignment methods, which in
turn are more specific than structure-based alignment methods.
Sequence-based methods can build relatively accurate alignments for close
homologous proteins. A few methods have been developed and their difference
mainly lies in alignment algorithms, amino acid mutation score and gap penalty.
Some methods such as the Needleman-Wunsch (Needleman and Wunsch, 1970)
and Smith-Waterman algorithms (Smith and Waterman, 1981) employ dynamic
programming to build alignments, while others such as BLAST (Altschul, et al.,
1990) and FASTA (Pearson, 1990) use more efficient heuristic-based alignment
algorithms. BLOSUM (Altschul, et al., 1990) and PAM (Henikoff and Henikoff,
1992) are two widely-used amino acid substitution matrices to score similarity of
two aligned residues. An affine function is used to penalize gaps (i.e., unaligned
residues) in an alignment. Generally speaking, sequence-based alignment only
works well for the alignments of close homologous proteins (sequence identity >
40%) since there are many conserved residues in their alignment and few gaps.
The limitation of sequence alignment lies in that it cannot reliably make
alignments when proteins under study are not very close to each other especially
when the similarity of two proteins falls into the twilight zone, i.e., the sequence
identity of two proteins is less than 25%. However, in many cases two proteins
sharing low sequence identity may still be homologous and share some
important structural and functional properties.
The quality of alignment can be improved by using sequence profile. Sequence
profile is built on the Multiple Sequence Alignment (MSA) with sequence
homologs, carries extra evolutionary information than its amino acid sequence
alone. The intuition is that mutation frequency is position-specific and it can be
detected when enough close homologs are found. To build a sequence profile,
PSI-BLAST can be used to find close homologs of target protein from a large
sequence database such as the NCBI non-redundant (NR) database and then
build a MSA of these homologs and convert the MSA to a sequence profile.
Various methods have been developed to align one primary sequence to one
sequence profile or align two sequence profiles together. HMMER (Eddy, 2001)
and SAM (Hughey and Krogh, 1995) are two tools that align one primary
sequence to one profile HMM. Other sequence-profile alignment tools include
DIALIGN (Morgenstern, et al., 1998) and FFAS (Jaroszewski, et al., 2005).
HHpred (Söding, 2005), FORTE (Tomii and Akiyama, 2004), and PICASSO

11
(Heger and Holm, 2001) are some tools that use profile-profile alignment. They
have shown better performance than sequence-sequence or sequence-profile
methods. PSI-BLAST (Altschul, et al., 1997) can be used to generate sequence
profile of a protein.
The quality of profile-based alignment also depends on the representation of
sequence profile. PSI-BLAST represents the sequence profile as a position-
specific frequency matrix (PSFM) or position-specific scoring matrix (PSSM),
which is widely-used in many applications such as homology detection, fold
recognition and protein structure prediction. Both PSFM and PSSM have
dimension of 20×N, where N is the protein sequence length. Each column in a
PSFM contains the occurring frequency of 20 amino acids at the corresponding
sequence position. Accordingly, each column in a PSSM contains the potential of
mutating to 20 amino acids at the corresponding position. A good sequence
profile shall include as much information in the MSA as possible. In addition to
representation, the quality of a sequence profile depends on the following factors:
the number of PSI-BLAST iterations, the E-value cutoff used to determine if two
proteins are homologous or not, and the sequence weighting scheme. It also
depends on how to include amino acid pseudo-counts in converting amino acid
occurring frequency to mutation potential.
Profile HMM (Hidden Markov Model) is another way to model an MSA of
protein homologs. Profile HMM is better than PSFM/PSSM in that the former
takes into consideration correlations between adjacent residues and also
explicitly models gaps, so profile HMM on average is more sensitive than
PSSM/PSFM for protein alignment and remote homology detection. In particular,
a profile HMM usually contains three states: match, insert and delete. A ‘match’
state at an MSA column models the probability of residues being allowed in the
column. It also contains emission probability of each amino acid type at this
column. An ‘insert’ or ‘delete’ state at an MSA column allow for insertion of
residues between that column and the next, or for deletion of residues. That is, a
profile HMM has a position-dependent gap penalty. The penalty for an insertion
or deletion depends on the HMM model parameters in each position. By contrast,
traditional sequence alignment model uses a position-independent gap penalty.
An insertion or deletion of x residues is typically scored with an affine gap
penalty, say 𝑎 + 𝑏(𝑥 − 1) where 𝑎 is the penalty for a gap opening and b for an
extended gap.
Profile-based alignment method can fail when a protein has a very sparse
sequence profile. The sparseness of a sequence profile can be quantified using the
number of effective sequence homologs (NEFF). NEFF can also be interpreted as

12
the average Shannon ‘sequence entropy’ for the profile or the average number of
amino acid substitutions across all residues of a protein. The NEFF at one residue
is calculated by 𝑒𝑥𝑝(−∑ 𝑝𝑘𝑘 𝑙𝑛𝑝𝑘) where 𝑝𝑘 is the probability for the k-th amino
acid type, and the NEFF for the whole protein is the average across all residues.
Therefore, NEFF ranges from 1 to 20 (i.e. the number of amino acid types). A
smaller NEFF corresponds to a sparser sequence profile and less homologous
information content. To go beyond this limitation, structural information can be
incorporated in building alignments. For the target protein with unknown
structure, we can predict its various structural information, such as 3 types and 8
types of secondary structure and solvent accessibility. If the predicted structural
features are aligned approximately correct with the true secondary structure
features of the template, the potential search space of possible alignments would
be reduced substantially. Popular threading algorithms such as RAPTOR (Xu, et
al., 2003), MUSTER (Wu and Zhang, 2008), HHpred (Söding, 2005) and Sparks
(Yang, et al., 2011) all exploit the structural features to build alignments.
Structural features are shown to be effective especially for proteins with sparse
profile.
Another important component of alignment approach is its scoring function,
which calculates a ratio between the likelihood of two proteins being
homologous (or evolutionarily related) and that of being non-homologous (or
evolutionarily unrelated). For sequence-sequence alignment, we can use two
amino acid substitution models to estimate the probability of two proteins being
homologous and non-homologous, respectively. The probability model for “non-
homologous” is also called null model, describing the case that two aligned
residues are evolutionarily unrelated. A few probability models such as PAM
and BLOSUM have been developed to estimate how likely two aligned residues
are evolutionarily related. PAM estimates the relatedness of two aligned residues
starting from single point mutations. BLOSUM derives amino acid substitution
model from blocks of multiple sequence alignment.
Unlike protein sequence alignment that uses an amino acid substitution matrix
such as BLOSUM62, profile-based alignment needs a different scoring function.
Nevertheless, some scoring functions for primary sequence-based homology
detection can be generalized to profile-based methods. A slight change of the
scoring functions can apply to the case when a profile is represented as an HMM.
Given a primary sequence/profile and a profile from another sequence, to
determine their similarity, one strategy is to estimate how likely the primary
sequence is a sample from the probability distribution encoded by the sequence
profile. The larger the alignment score the more likely that the primary
sequence/profile is a sample from the probability distribution encoded by the

13
sequence profile. Therefore, the alignment score quantifies the similarity between
the primary sequence/profile and the sequence profile. Methods implemented
such idea includes HMMER and HHpred. Other profile-based alignment scoring
function such as dot product and Jensen-Shannon scores are also proposed in
literature (Yona and Levitt, 2002).

14
Chapter 3. Protein Alignment by Using
Markov Random Fields
3.1 Introduction
As mentioned in previous chapter, all the popular profile-based alignment
methods represent an MSA with a position-specific scoring matrix (PSSM) or an
HMM (Hidden Markov Model). In this chapter, I will describe a Markov
Random Field (MRF) representation of sequence profiles. That is, an MRF is used
to model a multiple sequence alignment (MSA) of close sequence homologs.
Compared to HMM that can only model local-range residue correlation, MRF
can model long-range residue interactions (e.g., residue co-evolution) and thus,
encodes global information in a protein. An MRF is a graphical model encoding a
probability distribution over the MSA by a graph and a set of preset statistical
functions. A node in the MRF corresponds to one column in the MSA and the
existence of an edge between two nodes specifies correlation between two
columns. Each node is associated with a function describing position-specific
amino acid mutation pattern. Similarly, each edge is associated with a function
describing correlated mutation statistics between two columns. Using MRF to
represent the profiles, alignment of two proteins or protein families becomes that
of two MRFs. To align two MRFs, a scoring function or alignment potential is
needed to measure the similarity of two MRFs. We use a scoring function that
consists of both node alignment potentials and edge alignment potential, which
measure the node (i.e., amino acid) similarity and edge (i.e., interaction pattern)
similarity, respectively. We will introduce the two scoring functions in the next
chapters.
The graph of MRF derived profile MSA might contain loops so it is
computationally challenging to optimize a scoring function containing edge
alignment potential. To deal with this, we formulate MRF-MRF alignment as an
Integer Linear Programming (ILP) problem and then develop an ADMM
(Alternative Direction Method of Multipliers) (Boyd, et al., 2011) algorithm to

15
dentify an approximate (sub-optimal) solution. ADMM divides the MRF
alignment problem into two tractable sub-problems and then iteratively solve
them until they converge. Experiments show that this MRF-MRF alignment
method, denoted as MRFalign (Ma, et al., 2014), can generate more accurate
alignments and is also much more sensitive than other methods. MRFalign
works particularly well on mainly-beta proteins.
3.2 Methods
Modeling a protein family using Markov Random Fields
Given a protein sequence, we run PSI-BLAST with 5 iterations and E-value cutoff
0.001 to find its sequence homologs and then build their MSA (multiple sequence
alignment). We can use a multivariate random variable 𝑋 = (𝑋1, 𝑋2, … , 𝑋𝑁) ,
where 𝑁 is the number of columns (or the MSA length), to model the MSA. As
shown in Figure 3, each 𝑋𝑖 is a finite discrete random variable representing the
amino acid at columni in the MSA, taking values from 1 to 21, corresponding to
20 amino acids and gap. The occurring probability of the whole MSA can be
modeled by MRF that is a function of 𝑋. An MRF node represents one column in
the MSA and an edge represents the correlation between two columns. Here we
ignore very short-range residue correlation since it is not very informative. An
MRF consists of two types of functions: 𝜙(𝑋𝑖) and 𝜓(𝑋𝑖, 𝑋𝑘), where 𝜙(𝑋𝑖) is an
amino acid preference function for node 𝑖 and 𝜓(𝑋𝑖, 𝑋𝑘) is a pairwise amino acid
preference function for edge (𝑖, 𝑘) that reflects interaction between two nodes.
Then, the probability of observing a particular protein sequence 𝑋 can be
calculated as follows.
𝑃(𝑋) =1
𝑍∏ 𝜙(𝑋𝑖)∏ 𝜓(𝑋𝑖, 𝑋𝑘)(𝑖,𝑘)𝑖 (1)
where 𝑍 is the normalization factor (i.e., partition function).
The potential functions takes two kinds of information as features. One is the
occurring probability of 20 amino acids and gap at each node (i.e., each column
in MSA), which can also be interpreted as the marginal probability at each node.
The other is the correlation between two nodes, which can be interpreted as
interaction strength of two MSA columns.

16
Figure 3. Modeling a multiple sequence alignment (left) by a Markov Random
Field (right).
Scoring function for the alignment of two Markov Random Fields (MRFs)
Our scoring function for MRF-MRF alignment is a linear combination of node
alignment potential and edge alignment potential with equal weight. Let 𝑇and 𝑆
denote two MRFs for the two proteins under consideration. There are three
possible alignment states 𝑀 , 𝐼𝑡 and 𝐼𝑠 where 𝑀 represents two nodes being
aligned, 𝐼𝑡 denotes an insertion in 𝑇 (i.e., one node in 𝑇 is not aligned), and 𝐼𝑠
denotes an insertion in 𝑆 (i.e., one node in 𝑆 is not aligned). As shown in Figure 4,
each alignment can be represented as a path in an alignment matrix, in which
each vertex can be exactly determined by its position in the matrix and its state.
For example, the first vertex in the path can be written as (0, 0, 𝑑𝑢𝑚𝑚𝑦), the 2nd
vertex as (1, 1,𝑀) and the 3rd vertex as (1, 1, 𝐼𝑠). Therefore, we can write an
alignment as a set of triples, each of which has a form like (𝑖, 𝑗, 𝑢) where (𝑖, 𝑗)
represents the position and 𝑢 the state.
Figure 4. Representation of protein alignment. (A) Represented as a sequence of
states. (B) Each alignment is a path in the alignment matrix.

17
Scoring similarity of two Markov Random Fields
This section will introduce how to align two proteins by aligning their
corresponding MRFs. As shown in the left picture of Figure 5, building an
alignment is equivalent to finding a unique path from the left-top corner to the
right-bottom corner of the alignment matrix. For each vertex along the path, we
need a score to measure how good it is to transit to the next vertex. That is, we
need to measure how similar two nodes of the two MRFs are. We call this kind of
scoring function node alignment potential. Second, in addition to measuring the
similarity between the two aligned MRF nodes, we want to quantify the
similarity between two MRF edges. For example, in the right picture of Figure 5
residues “𝐿” and “𝑆” of the first protein are aligned to residues “𝐴” and “𝑄” of
the 2nd protein, respectively. We would like to estimate how good it is to align
the pair (𝐿, 𝑆) to the pair (𝐴, 𝑄). This pairwise similarity function is a function of
two MRF edges and we call it the edge alignment potential. When the edge
alignment potential is used to score the similarity of two MRFs, Viterbi algorithm
or other simple dynamic programming cannot be used to find the optimal
alignment. It can be proved that when edge alignment potential is considered
and gaps are allowed, the MRF-MRF alignment problem is NP hard (Lathrop,
1994). In this work, we will describe an ADMM algorithm to quickly find a
suboptimal alignment of two MRFs. Although suboptimal, we have empirically
found that the resulting alignments exhibit high accuracies.
Figure. 5. Traditional alignment methods (left) and our MRFalign method (right)

18
Node alignment potential of Markov Random Fields
Given an alignment, its node alignment potential is the accumulative potential of
all the vertices in the path. We use a Conditional Neural Fields (CNF) (Ma, et al.,
2012; Peng, et al., 2009) method to estimate the occurring probability of an
alignment, and then derive node alignment potential from this CNF. Briefly
speaking, we estimate the probability of an alignment A between 𝑇 and 𝑆 as
follows.
𝑃(𝐴|𝑇, 𝑆) = 𝑒∑ 𝐸𝑢(𝑇𝑖,𝑆𝑗)(𝑖,𝑗,𝑢)∈𝐴 /𝑍(𝑇, 𝑆) (2)
where 𝑍(𝑇, 𝑆) is a normalization factor summarizing all the possible alignments
between T and S, and 𝐸𝑢(𝑇𝑖, 𝑆𝑗) is a neural network with one hidden layer that
calculates the log-likelihood of a vertex (𝑖, 𝑗, 𝑢) in the alignment path, where i is a
node in 𝑇, 𝑗 a node in 𝑆, and 𝑢 a state. When 𝑢 is a match state, 𝐸𝑢 takes as input
the sequence profile context of two nodes 𝑖 and 𝑗 , denoted as 𝑇𝑖 and 𝑆𝑗 ,
respectively, and yields the log-likelihood of these two nodes being matched.
When 𝑢 is an insertion state, it takes as input the sequence profile context of one
node and yields the log-likelihood of this node being an insertion. The sequence
profile context of node 𝑖 is a 21 × (2w + 1) matrix where 𝑤 = 5, consisting of the
marginal probability of 20 amino acids and gap at 2𝑤 + 1 nodes indexed by 𝑖 − 𝑤,
𝑖 − 𝑤 + 1,…, 𝑖, 𝑖 + 1, …, 𝑖 + 𝑤 . In case that one column does not exist (when
𝑖 ≤ 𝑤 or 𝑖 + 𝑤 > 𝑁), zero is used. We train the parameters in Eu by maximizing
the occurring probability of a set of reference alignments, which are generated by
a structure alignment tool DeepAlign (Wang, et al., 2013). That is, we optimize
the model parameters so that the structure alignment of one training protein pair
has the largest probability among all possible alignments. A 𝐿2 -norm
regularization factor, which is determined by 5-fold cross validation, is used to
restrict the search space of model parameters to avoid over-fitting. See chapter 4
for more technical details.
Let 𝜃𝑖,𝑗𝑢 denote the local alignment potential of a vertex (𝑖, 𝑗, 𝑢) in the alignment
path. We calculate 𝜃𝑖,𝑗𝑢 from 𝐸𝑢 as follows.
𝜃𝑖,𝑗𝑢 = 𝐸𝑢(𝑇𝑖, 𝑆𝑗) − 𝐸𝑥𝑝(𝐸𝑢) (3)
where 𝐸𝑥𝑝(𝐸𝑢) is the expected value of 𝐸𝑢. It is used to offset the effect of the
background, which is the log-likelihood yielded by 𝐸𝑢 for any randomly chosen
node pairs (or nodes). We can calculate the reference alignment likelihood 𝐸𝑢 in
Eq. (3) by randomly sampling a set of protein pairs, each with the same lengths
as the sequence 𝑆 and template 𝑇 , respectively, and then estimating the

19
probability of alignment A based upon these randomly sampled protein pairs. As
long as we generate a sufficient number of samples, we can accurately
approximate 𝐸𝑢 . Here, 𝐸𝑢 depends only on the alignment state but not any
specific protein pair. I will introduce more details including the parameter
estimation and background probability calculation in next few chapters.
Edge alignment potential of Markov Random Fields.
The edge alignment potential calculates the similarity of two edges, one from
each MRF, based upon the interaction strength of two ends in one edge as shown
in Figure 6. As mentioned above, we use a predicted distance probability
distribution based on the features of two nodes to estimate their interaction
strength. Let 𝑑𝑖𝑘𝑇 be a random variable for the Euclidean distance between two
residues at 𝑖 and 𝑘 and 𝑑𝑗𝑙𝑆 is defined similarly. Let 𝜃𝑖,𝑘,𝑗,𝑙 denote the alignment
potential between edge (𝑖, 𝑘) in T and edge (𝑗, 𝑙) in 𝑆. We can calculate 𝜃𝑖,𝑘,𝑗,𝑙 as
follows.
𝜃𝑖,𝑘,𝑗,𝑙 = ∑ 𝑝(𝑑𝑖𝑘𝑇 |𝑐𝑖, 𝑐𝑘,𝑚𝑖𝑘)𝑝(𝑑𝑗𝑙
𝑆 |𝑐𝑗, 𝑐𝑙, 𝑚𝑗𝑙)𝑙𝑜𝑔𝑝(𝑑𝑖𝑘
𝑇 ,𝑑𝑗𝑙𝑆 )
𝑃𝑟𝑒𝑓(𝑑𝑖𝑘𝑇 )𝑃𝑟𝑒𝑓(𝑑𝑗𝑙
𝑆 )𝑑𝑖𝑘𝑇 ,𝑑𝑗𝑙
𝑆 (4)
where 𝑝(𝑑𝑖𝑘𝑇 |𝑐𝑖, 𝑐𝑘, 𝑚𝑖𝑘) is the probability of two nodes i and k in 𝑇 interacting at
distance 𝑑𝑖𝑘𝑇 ; 𝑝(𝑑𝑗𝑙
𝑆 |𝑐𝑗, 𝑐𝑙, 𝑚𝑗𝑙) is the probability of two nodes 𝑗 and 𝑙 in 𝑆
interacting at distance 𝑑𝑗𝑙𝑆 ; 𝑐𝑖 and 𝑐𝑘are the sequence profile contexts of two
nodes 𝑖 and 𝑘, respectively, and 𝑚𝑖𝑘 represents the Mutual Information (MI) (or
interaction strength) between these two nodes. The sequence profile context of
node i is a 21 × (2𝑤 + 1) matrix where 𝑤 = 5 , consisting of the occurring
probability of 20 amino acids and gap at 2𝑤 + 1 nodes indexed by 𝑖 − 𝑤, 𝑖 − 𝑤 +
1,… , 𝑖, 𝑖 + 1,… , 𝑖 + 𝑤 . In case that one column does not exist (when 𝑖 ≤ 𝑤 or
𝑖 + 𝑤 > 𝑁), zero is used. 𝑝(𝑑𝑖𝑘𝑇 , 𝑑𝑗𝑙
𝑆) is the probability of one distance 𝑑𝑖𝑘𝑇 being
aligned to another distance 𝑑𝑗𝑙𝑆 in reference alignments; and 𝑃𝑟𝑒𝑓(𝑑𝑖𝑘
𝑇 )
(𝑃𝑟𝑒𝑓(𝑑𝑗𝑙𝑆)) is the background probability of observing 𝑑𝑖𝑘
𝑇 (𝑑𝑗𝑙𝑆 ) in a protein
structure. Meanwhile xi and xk are position-specific features centered at the ith
and kth residues, respectively, and 𝑚𝑖𝑘 represents the mutual information
between the ith and kth columns in the multiple sequence alignment. We predict
𝑝(𝑑𝑖𝑘𝑇 |𝑐𝑖, 𝑐𝑘, 𝑚𝑖𝑘) using a probabilistic neural network (PNN) implemented in our
context-specific distance-dependent statistical potential package EPAD (Zhao
and Xu, 2012). EPAD takes as input sequence contexts and co-evolution
information and then yields inter-residue distance probability distribution.
Compared to contact information, here we use interaction at a given distance to
obtain a higher-resolution description of the residue interaction pattern.

20
Therefore, our scoring function contains more information and thus, may yield
better alignment accuracy.
Instead of using power series of MI, we can use Direct Information (DI), which is
a global statistics (i.e., measuring the residue co-evolution strength of two
positions considering other positions). DI can be calculated by some contact
prediction programs such PSICOV (Jones, et al., 2012), Evfold (Marks, et al.,
2011), plmDCA (Ekeberg, et al., 2013) as residue co-evolution. PSICOV assumes
that 𝑃(𝑋) is a Gaussian distribution and calculates the partial correlation between
two columns by inverse covariance matrix. By contrast, plmDCA does not
assume a Gaussian distribution and is more efficient and also slightly more
accurate. Generally speaking, these programs are time-consuming. The reliability
of mutual information (MI) or direct information (DI) depends on the number of
non-redundant sequence homologs. When there are few sequence homologs, the
resulting MI or DI is not very accurate. Therefore, it is not enough to only use
residue co-evolution strength to estimate residue interaction strength. We can
use other contact prediction programs such as PhyCMAP (Wang and Xu, 2013)
which integrates both residue co-evolution information, PSI-BLAST sequence
profile and others to predict the probability of two residues in contact. In
Chapter 5 I will introduce a new computational approach to estimate the
interaction strength between residues integrating joint multi-family evolutionary
coupling analysis and supervised learning.
Figure 6. Illustration of edge alignment potential for MRF-MRF alignment.
Aligning two MRFs by ADMM (Alternating Direction Method of Multipliers)
As mentioned before, an alignment can be represented as a path in the alignment
matrix, which encodes an exponential number of paths. We can use a set of
3𝑁1𝑁2 binary variables to indicate which path is chosen, where 𝑁1 and 𝑁2 are the

21
lengths of the two MSAs, (𝑖, 𝑗) is an entry in the alignment matrix and 𝑢 is the
associated state. 𝑧𝑖,𝑗𝑢 is equal to 1 if the alignment path passes (𝑖, 𝑗) with state 𝑢.
Therefore, the problem of finding the best alignment between two MRFs can be
formulated as the following quadratic optimization problem.
(P1) 𝑚𝑎𝑥𝑧 ∑ 𝜃𝑖,𝑗𝑢
𝑖,𝑗,𝑢 𝑧𝑖,𝑗𝑢 +
1
𝐿∑ 𝜃𝑖,𝑗,𝑘,𝑙
𝑢𝑣𝑖,𝑗,𝑘,𝑙,𝑢,𝑣 𝑧𝑖,𝑗
𝑢 𝑧𝑘,𝑙𝑣 (5)
where 𝜃𝑖,𝑗𝑢 and 𝜃𝑖,𝑗,𝑘,𝑙
𝑢𝑣 are node and edge alignment potentials as described in
previous section. Meanwhile,𝜃𝑖,𝑗,𝑘,𝑙𝑢𝑣 is equal to 0 if either 𝑢 or 𝑣 is not a match
state. 𝐿 is the alignment length and 1/𝐿 is used to make the accumulative node
and edge potential have similar scale. Note that 𝐿 is unknown and we will
describe how to determine it later in this section. Finally, the solution of P1 shall
be subject to the constraint that all those 𝑧𝑖,𝑗𝑢 with value 1 shall form a valid
alignment path. This constraint shall also be enforced to all the optimization
problems described in this section.
It is computationally intractable to find the optimal solution of P1. Below we
present an ADMM (Alternating Direction Method of Multipliers) method that
can efficiently solve this problem to suboptimal. See (Boyd, et al., 2011) for a
tutorial of the ADMM method. To use ADMM, we rewrite P1 as follows by
making a copy of 𝑧 to 𝑦, but without changing the solution space.
(P2) 𝑚𝑎𝑥𝑧,𝑦 ∑ 𝜃𝑖,𝑗𝑢
𝑖,𝑗,𝑢 𝑧𝑖,𝑗𝑢 +
1
𝐿∑ 𝜃𝑖,𝑗,𝑘,𝑙
𝑢𝑣𝑖,𝑗,𝑘,𝑙,𝑢,𝑣 𝑧𝑖,𝑗
𝑢 𝑦𝑘,𝑙𝑣 (6)
𝑠. 𝑡.∀𝑘, 𝑙, 𝑣, 𝑧𝑘,𝑙𝑣 = 𝑦𝑘,𝑙
𝑣
Problem P2 can be augmented by adding a term to penalize the difference
between 𝑧 and 𝑦.
(P3) 𝑚𝑎𝑥𝑧,𝑦 ∑ 𝜃𝑖,𝑗𝑢
𝑖,𝑗,𝑢 𝑧𝑖,𝑗𝑢 +
1
𝐿∑ 𝜃𝑖,𝑗,𝑘,𝑙
𝑢𝑣𝑖,𝑗,𝑘,𝑙,𝑢,𝑣 𝑧𝑖,𝑗
𝑢 𝑦𝑘,𝑙𝑣 −
𝜌
2∑ (𝑧𝑖,𝑗
𝑢 − 𝑦𝑖,𝑗𝑢 )
2𝑖,𝑗,𝑢 (7)
𝑠. 𝑡.∀𝑖, 𝑗, 𝑢, 𝑧𝑖,𝑗𝑢 = 𝑦𝑖,𝑗
𝑢
P3 is equivalent to P2 and P1, but converges faster due to the penalty term. Here
𝜌 is a hyper-parameter influencing the convergence rate of the algorithm.
Empirically, setting ρ to a constant (=0.5) enables our algorithm to converge
within 10 iterations for most protein pairs.
Adding the constraint 𝑧𝑖,𝑗𝑢 = 𝑦𝑖,𝑗
𝑢 using a Lagrange multiplier 𝜆 to Eq. (7), we have
the following Lagrangian dual problem:
(P4) 𝑚𝑖𝑛𝜆𝑚𝑎𝑥𝑧,𝑦 ∑ 𝜃𝑖,𝑗𝑢
𝑖,𝑗,𝑢 𝑧𝑖,𝑗𝑢 +
1
𝐿∑ 𝜃𝑖,𝑗,𝑘,𝑙
𝑢𝑣𝑖,𝑗,𝑘,𝑙,𝑢,𝑣 𝑧𝑖,𝑗
𝑢 𝑦𝑘,𝑙𝑣 + ∑ 𝜆𝑖,𝑗
𝑢𝑖,𝑗,𝑢 (𝑧𝑖,𝑗
𝑢 − 𝑦𝑖,𝑗𝑢 ) −
𝜌
2∑ (𝑧𝑖,𝑗
𝑢 − 𝑦𝑖,𝑗𝑢 )
2𝑖,𝑗,𝑢 (8)

22
It is easy to prove that P3 is upper bounded by P4. Now we will solve P4 and use
its solution to approximate P3 and thus, P1. Since both 𝑧 and 𝑦 are binary
variables, the last term in Eq. (8) can be expanded as follows.
𝜌
2∑ (𝑧𝑖,𝑗
𝑢 − 𝑦𝑖,𝑗𝑢 )
2𝑖,𝑗,𝑢 =
𝜌
2∑ (𝑧𝑖,𝑗
𝑢 + 𝑦𝑖,𝑗𝑢 − 2𝑧𝑖,𝑗
𝑢𝑖,𝑗,𝑢 𝑦𝑖,𝑗
𝑢 ) (9)
For a fixed λ, we can split P4 into the following two sub-problems.
(SP1) 𝑦∗ = 𝑎𝑟𝑔𝑚𝑎𝑥 ∑ 𝑦𝑘,𝑙𝑣
𝑘,𝑙,𝑣 𝐶𝑘,𝑙𝑣 (10)
where 𝐶𝑘,𝑙𝑣 =
1
𝐿∑ 𝜃𝑖,𝑗,𝑘,𝑙
𝑢𝑣 𝑧𝑖,𝑗𝑢
𝑖,𝑗,𝑢 − 𝜆𝑘,𝑙𝑣 −
𝜌
2(1 − 2𝑧𝑘,𝑙
𝑣 )
(SP2) 𝑧∗ = 𝑎𝑟𝑔𝑚𝑎𝑥∑ 𝑧𝑖,𝑗𝑢
𝑖,𝑗,𝑢 𝐷𝑖,𝑗𝑢 (11)
where 𝐷𝑖,𝑗𝑢 = 𝜃𝑖,𝑗
𝑢 + ∑1
𝐿𝜃𝑖,𝑗,𝑘,𝑙𝑢𝑣 𝑦𝑘,𝑙
𝑣∗ + 𝜆𝑖,𝑗𝑢
𝑘,𝑙,𝑣 −𝜌
2(1 − 𝑦𝑖,𝑗
𝑢∗)
The sub-problem SP1 optimizes the objective function with respect to 𝑦 while
fixing 𝑧, and the sub-problem SP2 optimizes the objective function with respect
to 𝑧 while fixing 𝑦. SP1 and SP2 do not contain any quadratic term, so they can
be efficiently solved using the classical dynamic programming algorithm for
sequence or HMM-HMM alignment.
In summary, we solve P4 using the following procedure,
Step 1: Initialize 𝑧 by aligning the two MRFs without the edge alignment
potential, which can be done by dynamic programming. Accordingly, initialize 𝐿
as the length of the initial alignment.
Step 2: Solve (SP1) first and then (SP2) using dynamic programming, each
generating a feasible alignment.
Step 3: If the algorithm converges, i.e., the difference between 𝑧 and y is very
small or zero, stop here. Otherwise, we update the alignment length 𝐿 as the
length of the alignment just generated and the Lagrange multiplier 𝜆 using sub-
gradient descent as in Eq. (12), and then go back to Step 2.
𝜆𝑛+1 = 𝜆𝑛 − 𝜌(𝑧∗ − 𝑦∗) (12)
Due to the quadratic penalty term in Eq. (6), this ADMM algorithm usually
converges much faster and also yields better solutions than without this term.
Empiric ally, it converges within 10 iterations for most protein pairs. See (Boyd,
et al., 2011) for the convergence proof of a general ADMM algorithm.

23
3.3 Results
Training and validation data
To train the node alignment potential, we constructed the training and validation
data from SCOP70. The sequence identity of all the training and validation
protein pairs is uniformly distributed between 20% and 70%. Further, two
proteins in any pair are similar at superfamily or fold level. In total we use a set
of 1400 protein pairs as the training and validation data, which covers 458 SCOP
folds (Andreeva, et al., 2004). Five-fold cross validation is used to choose the
hyper-parameter in our machine learning model. In particular, every time we
choose 1000 out of the 1400 protein pairs as the training data and the remaining
400 pairs as the validation data such that there is no fold-level redundancy
between the training and validation data. A training or validation protein has
less than 400 residues and contains less than 10% of residues without 3D
coordinates. The reference alignment for a protein pair is generated by a
structure alignment tool DeepAlign. Each reference alignment has fewer than 50
gap positions in the middle and the number of terminal gaps is less than 20% of
the alignment length.
Test data
The data used to test alignment accuracy has no fold-level overlap with the
training and validation data. In particular, we use the following three datasets to
test the alignment accuracy, which are subsets of the test data used in
(Angermüller, et al., 2012) to benchmark protein modeling methods.
1. Set3.6K: a set of 3617 non-redundant protein pairs. Two proteins in a pair
share <40% sequence identity and have small length difference. By “non-
redundant” we mean that in any two protein pairs, there are at least two proteins
(one from each pair) sharing less than 25% sequence identity.
2. Set2.6K: a set of 2633 non-redundant protein pairs. Two proteins in a pair
share <25% sequence identity and have length difference larger than 30%. This
set is mainly used to test the performance of one method in handling with
domain boundary.
3. Set60K: a very large set of 60929 protein pairs, in most of which two proteins
share less than 40% sequence identity. Meanwhile, 846, 40902, and 19181 pairs
are similar at the SCOP family, superfamily and fold level, respectively, and 151,
2691 and 2218 pairs consist of only all-beta proteins, respectively.

24
We use the following benchmarks to test remote homology detection success rate.
4. SCOP20, SCOP40 and SCOP80, which are used by Söding group to study
context-specific mutation score (Angermüller, et al., 2012). They are constructed
by filtering the SCOP database with a maximum sequence identity of 20%, 40%
and 80%, respectively. In total they have 4884, 7088, and 9867 proteins,
respectively, and 1281, 1806, and 2734 beta proteins, respectively.
We run PSI-BLAST with 5 iterations to detect sequence homologs and generate
MSAs for the first three datasets. The MSA files for the three SCOP benchmarks
are downloaded from the HHpred website. Pseudo-counts are used in building
sequence profiles. Real secondary structure information is not used since this
paper focuses on sequence-based homology detection.
Programs to compare
To evaluate alignment accuracy, we compare our method, denoted as MRFalign,
with sequence-HMM alignment method HMMER and HMM-HMM alignment
method HHalign. HHMER is run with a default E-value threshold (10.0).
HHalign is run with the option “-mact 0.1”. To evaluate the performance of
homology detection, we compare MRFalign, with FFAS (Jaroszewski, et al., 2005)
(PSSM-PSSM comparison), hmmscan (sequence-HMM comparison) and
HHsearch and HHblits (Remmert, et al., 2012) (HMM-HMM comparison).
HHsearch and hmmscan use HHalign and HMMER, respectively, for protein
alignment.
Evaluation criteria
Three performance metrics are used including reference-dependent alignment
precision, alignment recall and homology detection success rate. Alignment
precision is defined as the fraction of aligned positions that are correctly aligned.
Alignment recall is the fraction of alignable residues that are correctly aligned.
Reference alignments are used to judge if one residue is correctly aligned or
alignable. To reduce bias, we use three very different structure alignment tools to
generate reference alignments, including TM-align (Zhang and Skolnick, 2005),
Matt (Menke, et al., 2008), and DeepAlign.
Reference-dependent alignment recall
As shown in Tables 1 and 2, our method MRFalign exceeds all the others
regardless of the reference alignments on both dataset Set3.6K and Set2.6K.

25
MRFalign outperforms HHalign by ~10% on both datasets, and HHMER by ~23%
and ~24%, respectively. If 4-position off the exact match is allowed in calculating
alignment recall, MRFalign outperforms HHalign by ~11% on both datasets, and
HHMER by ~25% and ~33%, respectively.
Table 1. Reference-dependent alignment recall on Set3.6K. Three structure
alignment tools (TMalign, Matt and DeepAlign) are used to generate reference
alignments. “4-offset” means that 4-position off the exact match is allowed. The
bold indicates the best results.
TMalign Matt DeepAlign Exact match 4-offset Exact match 4-offset Exact match 4-offset HMMER 22.9% 26.5% 24.1% 27.4% 25.5% 28.1% HHalign 36.3% 39.1% 37.0% 42.1% 38.4% 42.8%
MRFalign 47.4% 51.0% 47.5% 52.6% 49.2% 53.5%
Table 2. Reference-dependent alignment recall on Set2.6K. See Table 1 for
explanation.
TMalign Matt DeepAlign Exact match 4-offset Exact match 4-offset Exact match 4-offset HMMER 36.5% 42.6% 38.6% 44.0% 40.4% 45.0% HHalign 62.5% 66.1% 63.2% 66.2% 64.0% 66.7%
MRFalign 72.8% 76.2% 73.5% 76.7% 74.2% 77.8%
On the very large set Set60K, as shown in Table 3, our method outperforms the
other two in each SCOP classification regardless of the reference alignments used.
MRFalign is only slightly better than HHalign at the family level, which is not
surprising since it is easy to align two closely-related proteins. At the
superfamily level, our method outperforms HHalign and HMMER by ~6% and
~18%, respectively. At the fold level, our method outperforms HHalign and
HHMER by ~7% and ~14%, respectively.
Alignment recall for beta proteins. Our method outperforms HHalign and
HMMER by ~3% and ~12%, respectively, at the family level; ~7% and ~19%,
respectively, at the superfamily level; and ~10% and ~16%, respectively, at the
fold level, regardless of reference alignments.
Table 3. Reference-dependent alignment recall (exact match) on the large
benchmark Set60K. The protein pairs are divided into 3 groups based upon the
SCOP classification. The bold indicates the best results.
TMalign Matt DeepAlign

26
HMMER HHalign MRFalign HMMER HHalign MRFalign HMMER HHalign MRFalign
Family 57.4% 69.2% 71.0% 59.1% 70.5% 74.5% 63.2% 72.6% 75.5% Superfamily 31.2% 42.0% 48.1% 32.3% 42.4% 51.7% 32.8% 49.4% 55.6%
Fold 1.3% 7.0% 14.2% 1.6% 8.0% 15.5% 2.0% 8.7% 18.4% Family (beta) 60.9% 69.9% 73.1% 64.0% 75.1% 78.4% 68.4% 79.0% 82.9%
Superfamily (beta) 35.0% 47.2% 52.1% 37.0% 50.2% 55.8% 39.1% 52.9% 60.7% Fold (beta) 2.5% 8.3% 17.3% 3.0% 9.1% 17.1% 4.0% 10.1% 21.8%
Reference-dependent alignment precision
As shown in Tables 4 and 5, our method MRFalign exceeds all the others
regardless of the reference alignments on both data sets Set3.6K and Set2.6K.
MRFalign outperforms HHalign by ~8% and ~5%, respectively, and HMMER by
~15% and ~13%, respectively. If 4-position off the exact match is allowed in
calculating alignment precision, MRFalign outperforms HHalign by ~8% and
~9%, and HMMER by ~14% and ~18% on Set3.6K and Set2.6K, respectively.
Table 4. Reference-dependent alignment precision on Se3.6K. Three structure
alignment tools (TMalign, Matt and DeepAlign) are used to generate reference
alignments. “4-offset” means that 4-position off the exact match is allowed. The
bold indicates the best results.
TMalign Matt DeepAlign Exact match 4-offset Exact match 4-offset Exact match 4-offset HMMER 29.3% 34.1% 29.6% 34.7% 31.5% 35.6% HHalign 35.9% 39.4% 36.2% 39.4% 37.2% 41.7%
MRFalign 43.2% 47.4% 44.1% 48.5% 46.1% 50.4%
Table 5. Reference-dependent alignment precision on Set2.6K. See Table 4 for
explanation.
TMalign Matt DeepAlign Exact match 4-offset Exact match 4-offset Exact match 4-offset HMMER 48.0% 50.1% 48.2% 50.3% 51.4% 54.8% HHalign 57.1% 59.9% 57.3% 60.0% 58.3% 61.4%
MRFalign 62.5% 69.1% 62.7% 69.6% 63.2% 70.0%
On the very large set Set60K, as shown in Table 6, our method outperforms the
other two in each SCOP classification regardless of the reference alignments used.
At the family level, our method outperforms HHalign and HMMER by ~3% and
~4%, respectively. At the superfamily level, our method outperforms HHalign
and HMMER by ~4% and ~5%, respectively. At the fold level, our method
outperforms HHalign and HHMER by ~5% and ~8%, respectively.

27
Table 6. Reference-dependent alignment precision (exact match) on the large
benchmark Set60K. The protein pairs are divided into 3 groups based upon the
SCOP classification. The bold indicates the best results.
TMalign Matt DeepAlign
HMMER HHalign MRFalign HMMER HHalign MRFalign HMMER HHalign MRFalign
Family 63.1% 63.9% 67.3% 64.3% 65.4% 68.0% 68.4% 69.2% 71.4% Superfamily 38.7% 39.5% 42.8% 40.5% 41.3% 44.9% 43.2% 44.3% 48.7%
Fold 4.2% 7.4% 11.5% 4.7% 8.0% 12.3% 5.4% 8.2% 14.5% Family (beta) 66.4% 65.8% 69.5% 67.4% 68.1% 72.3% 70.8% 72.4% 77.9%
Superfamily (beta) 44.2% 44.9% 48.8% 45.4% 46.2% 49.4% 46.6% 48.4% 53.7% Fold (beta) 6.1% 9.3% 14.1% 6.7% 9.2% 14.5% 7.9% 8.6% 17.8%
Homology detection success rate
To evaluate homology detection rate, we employ three benchmarks SCOP20,
SCOP40 and SCOP80 introduced in (Angermüller, et al., 2012). For each protein
sequence in one benchmark, we treat it as a query, align it to all the other
proteins in the same benchmark and then examine if those with the best
alignment scores are similar to the query or not. We also conducted homology
detection experiments using hmmscan, FFAS, HHsearch and HHblits with
default options. The success rate is measured at the superfamily and fold levels,
respectively. When evaluating the success rate at the superfamily (fold) level, we
exclude those proteins similar to the query at least at the family (superfamily)
level. For each query protein, we examine the top 1-, 5- and 10-ranked proteins,
respectively.
As shown in Table 7, tested on SCOP20, SCOP40 and SCOP80 at the superfamily
level, our method MRFalign succeeds on ~6%, ~4% and ~4% more query proteins
than HHsearch, respectively, when only the first-ranked proteins are considered.
As shown in Table 8, at the fold level, MRFalign succeeds on ~11%, ~11% and ~12%
more proteins than HHsearch, respectively, when only the first-ranked proteins
are evaluated. At the superfamily level, SCOP20 is more challenging than the
other two benchmarks because it contains fewer proteins similar at this level.
Nevertheless, at the fold level, SCOP80 is slightly more challenging than the
other two benchmarks maybe because it contains many more irrelevant proteins
and thus, the chance of ranking false positives at top is higher.
Similar to alignment accuracy, our method for homology detection also has a
larger advantage on the beta proteins. In particular, as shown in Table 9, tested
on SCOP20, SCOP40 and SCOP80 at the superfamily level, MRFalign succeeds

28
on ~7%, ~5% and ~7% more proteins than HHsearch, respectively, when only the
first-ranked proteins are evaluated. As shown in Table 10, at the fold level,
MRFalign succeeds on ~13%, ~16% and ~17% more proteins than HHsearch,
respectively, when only the first-ranked proteins are evaluated. Note that in this
experiment, only the query proteins are mainly-beta proteins, the subject
proteins can be of any types. If we restrict the subject proteins to only beta
proteins, the success rate increases further due to the reduction of false positives.
Table 7. Homology detection performance at the superfamily level Scop20 Scop40 Scop80
Top1 Top5 Top10 Top1 Top5 Top10 Top1 Top5 Top10 hmmscan 35.2% 36.5% 36.5% 40.2% 41.7% 41.8% 43.9% 45.2% 45.3%
FFAS 48.6% 54.4% 55.6% 52.1% 56.3% 57.1% 49.8% 53.0% 53.7% HHsearch 51.6% 57.3% 59.2% 55.8% 60.8% 62.4% 56.1% 60.1% 61.8%
HHblits 51.9% 56.3% 57.5% 56.0% 59.8% 60.9% 59.2% 62.5% 63.3% MRFalign 58.2% 61.7% 63.4% 59.3% 63.6% 65.8% 60.4% 64.7% 66.1%
Table 8. Homology detection performance at the fold level Scop20 Scop40 Scop80
Top1 Top5 Top10 Top1 Top5 Top10 Top1 Top5 Top10 hmmscan 5.2% 6.1% 6.1% 6.2% 6.9% 6.9% 5.9% 6.5% 6.6%
FFAS 13.1% 18.7% 20.0% 10.4% 14.5% 15.4% 9.1% 11.9% 12.6% HHsearch 16.3% 24.7% 28.6% 17.6% 25.3% 29.1% 15.4% 21.9% 25.0%
HHblits 17.4% 25.2% 27.2% 19.1% 26.0% 28.2% 18.4% 25.0% 27.0% MRFalign 27.2% 36.8% 41.2% 28.3% 37.9% 42.4% 27.0% 38.1% 41.6%
Table 9. Homology detection performance for mainly beta proteins at the
superfamily level
Scop20 Scop40 Scop80 Top1 Top5 Top10 Top1 Top5 Top10 Top1 Top5 Top10
hmmscan 29.1% 29.4% 29.4% 34.7% 35.1% 35.1% 43.7% 44.0% 44.1% FFAS 43.6% 49.9% 51.9% 48.2% 52.4% 53.5% 43.7% 46.3% 47.2%
HHsearch 48.2% 54.6% 56.9% 52.0% 56.9% 59.1% 47.7% 51.8% 53.7% HHblits 47.5% 52.1% 53.7% 51.4% 54.8% 56.6% 52.9% 54.6% 57.8%
MRFalign 55.4% 61.7% 65.9% 57.3% 63.5% 66.8% 54.2% 59.7% 64.2%
Contribution of edge alignment potential and mutual information
To evaluate the contribution of our edge alignment potential, we calculate the
alignment recall improvement resulting from using edge alignment potential on
two benchmarks Set3.6K and Set2.6K. As shown in Table 11, our edge alignment
potential can improve alignment recall by 3.4% and 3.7%, respectively. When
mutual information is used, we can further improve alignment recall by 1.1%
and 1.9% on these two sets, respectively. Mutual information is mainly useful for
proteins with many sequence homologs since it is close to 0 when there are few
sequence homologs. As shown in Table 11, if only those proteins with at least 256

29
non-redundant sequence homologs are considered, the improvement resulting
from mutual information is ~3%.
Table 10. Homology detection performance for mainly beta proteins at the fold
level
Scop20 Scop40 Scop80 Top1 Top5 Top10 Top1 Top5 Top10 Top1 Top5 Top10
hmmscan 6.9% 7.6% 7.6% 8.0% 8.6% 8.6% 7.0% 7.4% 7.4% FFAS 22.7% 30.1% 31.8% 15.2% 20.4% 21.7% 11.8% 15.3% 16.1%
HHsearch 24.4% 34.7% 38.8% 26.8% 37.7% 41.6% 19.1% 26.8% 29.5% HHblits 24.1% 33.3% 34.8% 26.9% 35.3% 37.1% 24.7% 34.1% 35.5%
MRFalign 37.4% 55.0% 61.4% 42.5% 51.1% 54.6% 36.4% 48.0% 55.9%
Table 11. Contribution of edge alignment potential and mutual information,
measured by alignment recall improvement on two benchmarks Set3.6K and
Set2.6K. The structure alignments generated by DeepAlign are used as reference
alignments.
Alignment recall for the whole test sets
Set3.6K Set2.6K
Exact Match 4-position offset Exact Match 4-position offset
Only with node potential 44.7% 48.6% 68.6% 71.8%
Node + edge potential, no MI 48.1% 52.2% 72.3% 75.2%
Node + edge potential with MI 49.2% 53.5% 74.2% 77.8%
Alignment recall on proteins with at least 256 non-redundant sequence homologs
391 pairs in Set3.6K 509 pairs in Set2.6K
Only with node potential 59.5% 63.4% 71.3% 75.8%
Node + edge potential, no MI 62.1% 66.7% 73.5% 78.1%
Node + edge potential with MI 65.2% 69.8% 76.6% 81.0%
Running time
Figure 7 shows the running time of MRFalign with respect to protein length. As a
control, we also show the running time of the Viterbi algorithm, which is used by
our ADMM algorithm to generate alignment at each iteration. As shown in this
figure, MRFalign is no more than 10 times slower than the Viterbi algorithm. To
speed up homology detection, we first use the Viterbi algorithm to perform an
initial search without considering edge alignment potential and keep only top
200 proteins, which are then subject to realignment and rerank by our MRFalign
method. Therefore, although MRFalign may be very slow compared to the

30
Viterbi algorithm, empirically we can do homology search only slightly slower
than the Viterbi algorithm.
Figure 7. Running time of the Viterbi algorithm and our ADMM algorithm. The
X-axis is the geometric mean of the two protein lengths in a protein pair. The Y-
axis is the running time in seconds.
Is our MRFalign method over-trained?
We conducted two experiments to show that our MRFalign is not overtrained. In
the first experiment, we used 36 CASP10 hard targets as the test data. Our
training set was built before CASP10 started, so there is no redundancy between
the CASP10 hard targets and our training data. Using MRFalign and HHpred,
respectively, we search each of these 36 test targets against PDB25 to find the best
match. Since PDB25 does not contain proteins very similar to many of the test
targets, we built a 3D model using MODELLER from the alignment between a
test target and its best match and then measure the quality of the model. As
shown in Figure 8, MRFalign can yield much better 3D models than HHsearch
for most of the targets. This implies that our method can generalize well to the
test data not similar to the training data.
In the second experiment, we divide the proteins in SCOP40 into three subsets
according their similarity with all the training data. We measure the similarity of
one test protein with all the training data by its best BLAST E-value. We used
two values 1e-2 and 1e-35 as the E-value cutoff so that the three subsets have
roughly the same size. As shown in Table 12, the advantage of our method in
remote homology detection over HHpred is roughly same across the three
subsets. Since HHpred is an unsupervised algorithm, this implies that the
performance of our method is not correlated to the test-training similarity.
Therefore, it is unlikely that our method is overfit by the training data.

31
Figure 8. The model quality, measured by TM-score, of our method and HHpred
for the 36 CASP10 hard targets. One point represents two models generated by
our method (X-axis) and HHpred (Y-axis).
Table 12. Fold recognition rate of our method on SCOP40, with respect to the
similarity (measured by E-value) between the test data and the training data.
E-value < 1e-35 1e-35 < E-value < 1e-2 E-value > 1e-2 Top1 Top5 Top10 Top1 Top5 Top10 Top1 Top5 Top10 hmmscan 5.0% 5.6% 5.6% 7.3% 7.9% 7.9% 6.4% 7.3% 7.4%
FFAS 10.3% 14.5% 15.8% 9.7% 12.9% 13.5% 11.6% 16.5% 17.5% HHsearch 16.0% 23.2% 26.5% 18.5% 26.2% 30.3% 18.9% 27.2% 31.7%
HHblits 16.9% 23.1% 25.5% 20.8% 27.4% 28.9% 20.2% 28.3% 31.1% MRFalign 25.5% 35.9% 39.4% 29.7% 39.5% 43.3% 29.4% 39.0% 43.6%
3.4 Discussion
In this chapter I have presented a new alignment method that aligns two families
through alignment of two Markov Random Fields (MRFs), which models the
multiple sequence alignment (MSA) of a protein family using an undirected
general graph in a probabilistic way. The MRF representation is better than the
extensively-used PSSM and HMM representations in that the former can capture
long-range residue interaction pattern, which reflects the overall 3D structure of
a protein family. As such, MRF comparison is much more sensitive than HMM
comparison in detecting remote homologs. This is validated by our large-scale
experimental tests showing that MRF-MRF comparison can greatly improve
alignment accuracy and remote homology detection over currently popular

32
sequence-HMM, PSSM-PSSM, and HMM-HMM comparison methods. Our
method also has a larger advantage over the others on mainly-beta proteins.
We build our MRF model of a protein family based upon multiple sequence
alignment (MSA) in the absence of native structures. The accuracy of the MRF
model depends on the accuracy of an MSA. Currently we rely on the MSA
generated by PSI-BLAST. In the future, we may explore better alignment
methods for MSA building or even utilize solved structures of one or two protein
sequences to improve MSA. The accuracy of the MRF model parameter usually
increases with respect to the number of non-redundant sequence homologs in the
MSA. Along with more and more protein sequences are generated by a variety of
sequencing projects, we shall be able to build accurate MRFs for more and more
protein families and thus, detect their homologous relationship more accurately.
An accurate scoring function is essential to MRF-MRF comparison. Many
different methods can be used to measure node and edge similarity of two MRFs,
just like many different scoring functions can be used to measure the similarity of
two PSSMs or HMMs. This chapter presents only one of them. In the future we
may explore more possibilities. It is computationally intractable to find the best
alignment between two MRFs when edge similarity is taken into consideration.
In this chapter I also present an ADMM algorithm that can efficiently solve the
MRF-MRF alignment problem to suboptimal. However, this algorithm currently
is about 10 times slower than the Viterbi algorithm for PSSM-PSSM alignment.
Chapter 4 A Conditional Neural
Fields Model for Protein Alignment
4.1 Introduction
In this chapter I will introduce the training and inference algorithm of the node
potential introduced in the last chapter. Current protein alignment methods are
limited in the following aspects. One is that these methods use linear scoring
functions to guide the sequence-template alignment (Eddy, 2001; Söding, 2005).
The choice of a scoring function is the key to alignment accuracy. A linear
function (Peng and Xu, 2009) cannot deal well with correlation among protein
features, although many features are indeed correlated (e.g., secondary structure

33
vs. solvent accessibility). The other issue is that these methods heavily depend on
sequence profile. Although sequence profile is very powerful in detecting remote
homologs and generating accurate alignments, as demonstrated by HHpred and
many others, these method do not work well for many proteins with a very low
NEFF which is defined in the previous chapter.
To go beyond the limitations of current alignment methods, in this chapter I will
present a novel Conditional Neural Fields (CNF) method for protein alignment
used for protein threading, which can align a sequence to a distantly-related
template much more accurately. Our method combines homologous information
(i.e., sequence profile) and structure information using a probabilistic nonlinear
scoring function, which has several advantages over the widely-used linear
functions. First, it explicitly accounts for correlations among protein features,
reducing over-counting and/or under-counting of protein features. Second, our
method can align different regions of the sequence and template using different
criteria. For example, we can use sequence information to align disordered
regions (since only sequence information is reliable for them) and sequence plus
structure information for the others. Third, the relative importance of
homologous and structural information is dynamically determined. When
proteins under consideration have a sparse sequence profile, we count more on
structural information; otherwise homologous information (e.g., sequence profile
similarity). Finally, gap probability is estimated using both context specific and
position specific features. If protein sequence profile is sparse, we will rely more
on context-specific information (i.e., structure information); otherwise the
position-specific information derived from alignment of sequence homologs.
The CNF method is able to integrate as much information as possible to estimate
the alignment probability of two residues. In particular, the CNF method utilizes
neighborhood (sequence and structural) information to estimate the probability
of two residues being aligned much more accurately. Neighborhood information
is also very helpful in determining gap opening positions. Neighborhood
(sequence) information has been used by many programs (e.g., PSIPRED
(McGuffin, et al., 2000)) for protein local structure prediction and by few for
protein sequence alignment and homology search, but such information has not
been applied to protein threading, especially for gap opening. It is much more
challenging to make use of neighborhood information in protein threading since
it needs to deal with a variety of structure information.
We also use a quality-sensitive method to train the CNF model, as opposed to the
standard maximum-likelihood (ML) method. The ML method treats all the
aligned positions equally. However, not all the aligned positions in an alignment

34
are equally important. Some positions are more conserved than others and more
important for the construction of 3D models from the alignments. By directly
maximizing the expected quality of a set of training alignments, the quality-
sensitive method weighs more on the conserved positions to ensure accurate
alignment. Experimental results confirm that the quality-sensitive method
usually can result in better alignments.
Tested on both public (but small) benchmarks and large-scale in-house datasets,
our CNF method generates significantly better alignments than the best profile-
based method (e.g., HHpred) and several top threading methods including
BThreader (Peng and Xu, 2009), Sparks and MUSTER. Our method performs
especially well when only distantly-related templates are available or when
proteins under consideration have sparse sequence profile.
4.2 Methods
Conditional Neural Fields (CNF) for Protein Threading
CNF (Conditional Neural Fields) is a recently-developed probabilistic graphical
model, integrating and embracing the strength of both Conditional Random
Fields (CRFs) (Lafferty, et al., 2001) and neural networks. CNF not only can
parameterize conditional probability in the log-linear form (which is similar to
CRFs), but also can implicitly model complex/nonlinear relationship between
input features and output labels (which is similar to neural networks). CNF has
been applied to protein secondary structure prediction (Peng, et al., 2009; Wang,
et al., 2011), protein conformation sampling (Zhao, et al., 2010) and handwriting
recognition (Peng, et al., 2009). Here we describe how to model protein sequence-
template alignment using CNF.
Let 𝑇 and 𝑆 denote a template protein with solved structure and a target protein
without solved structure, respectively. Each protein is associated with some
protein features, e.g., sequence profile, (predicted) secondary structure,
(predicted) solvent accessibility. Let 𝐴 = {𝑎1, 𝑎2, … , 𝑎𝐿𝐴} denote an alignment
between 𝑇 and S where LA is the alignment length and ai is one of the three
possible states 𝑀, 𝐼𝑡 and 𝐼𝑆, which we have introduced in the previous chapter.
As shown in Figure 9, an alignment can be represented as a sequence of three
states and assigned a probability calculated by our CNF model. The alignment
with the highest probability is deemed as the optimal. We calculate the
probability of one alignment A as follows.

35
𝑃(𝐴|𝑇, 𝑆, 𝜃) = 𝑒𝑥𝑝(∑ 𝐸(𝑎𝑖−1, 𝑎𝑖 , 𝑇, 𝑆)𝐿𝐴𝑖=1 )/𝑍(𝑇, 𝑆) (13)
where θ is the model parameter vector to be trained, i indicates one alignment
position and 𝑍(𝑇, 𝑆) = ∑ 𝑒𝑥𝑝(∑ 𝐸(𝑎𝑖−1, 𝑎, 𝑇, 𝑆)𝐿𝐴𝑖=1 )𝐴 is the normalization factor (i.e.,
partition function) summing over all possible alignments for a given protein pair.
The function 𝐸 in Eq. (13) estimates the log-likelihood of state transition from
𝑎𝑖−1 to 𝑎𝑖 based upon protein features. It is a nonlinear scoring function defined
as follows.
𝐸(𝑎𝑖−1, 𝑎𝑖, 𝑇, 𝑆) = 𝜑(𝑎𝑖−1, 𝑎𝑖, 𝑇, 𝑆) + 𝜙(𝑎𝑖, 𝑇, 𝑆) (14)
Where 𝜑 and 𝜙 are called edge and node functions introduced in the chapter 3,
respectively, quantifying correlation among alignment states and protein
features. Both the node and edge feature functions can be as simple as a linear
function or as complex as a neural network. Here we use neural networks with
only one hidden layer to construct these two types of functions. Due to space
limit, we only explain the edge feature function in detail. The node feature
function is similar but slightly simpler. Since in total there are 9 possible state
transitions in an alignment, we need 9 edge feature functions, each
corresponding to one kind of state transition. Figure 9 shows an example of the
edge feature function for the state transition from 𝑀 to 𝐼𝑡 . Given one state
transition 𝑢 to 𝑣at position 𝑖 where 𝑢 and 𝑣 are two alignment states, the edge
feature function is defined as follows.
𝜑(𝑎𝑖−1 = 𝑢, 𝑎𝑖 = 𝑣, 𝑇, 𝑆) = ∑ 𝜆𝑢,𝑣𝑗𝐻𝑢,𝑣𝑗(𝑤𝑢,𝑣
𝑗𝑓𝑢,𝑣(𝑇, 𝑆, 𝑖))𝑗 (15)
Where 𝑓𝑢,𝑣(𝑇, 𝑆, 𝑖) is the feature generation function, which generates input
features from the target and template proteins for the alignment at position 𝑖. The
feature generation function is state-dependent, so we may use different features
for different state transitions. In Eq. (15), 𝑗 is the index of the hidden neurons in
the hidden layer, 𝜆𝑢,𝑣𝑗
is the model parameter between one hidden neuron and
the output layer, 𝐻𝑢,𝑣𝑗(𝑥) (sigmoid function) is the gate function for the hidden
neuron conducting nonlinear transformation of input, and 𝑤𝑢,𝑣𝑗
is the model
parameter vector connecting the input layer to one hidden neuron. All the model
parameters are state-dependent, but position-independent. In total there are 9
different neural networks for the 9 state transitions. These neural networks have
separate model parameters. All of them constitute the model parameter vector 𝜃
introduced in Eq. (13).

36
Figure. 9. An example of the edge feature function φ, which is a neural network
with one hidden layer. The function takes both template and target protein
features as input and yields one likelihood score for state transition 𝑀 to 𝐼𝑡 .
Meanwhile, 𝐻1 , 𝐻2 and 𝐻3 are hidden neurons conducting nonlinear
transformation of the input features.
Because a hidden layer is introduced to CNF to improve expressive power over
CRF, it is important to control the model complexity to avoid over-fitting. We do
so by using a 𝐿2-norm regularization factor to restrict the search space of model
parameters. This regularization factor is determined by 5-fold cross validation.
Once the CNF model is trained, we can calculate the optimal alignment using the
Viterbi algorithm (Forney Jr, 1973).
Training CNF Model by Quality-Sensitive Method
CRFs/CNFs are usually trained by maximum likelihood (ML) or maximum a
posteriori (MAP). The ML method trains the CRFs/CNFs model parameters by
maximizing the occurring probability of a set of reference alignments, which are
built by a structure alignment tool. The ML method treats all the aligned
positions equally, ignoring the fact that some are more conserved than others. It
is important not to misalign the conserved residues since they may be related to
protein function. As such, it makes more sense to treat conserved and non-
conserved residues separately. Although there are a few measures for the degree
of conservation to be studied, here we simply use the local TM-score (Xu and
Zhang, 2010) between two aligned residues. Given a reference alignment (and
the superimposition of two proteins in the alignment), the local TM-score at one
alignment position i is defined as follows.

37
𝑤𝑖 =1
1+(𝑑𝑖/𝑑0)2 (16)
Where 𝑑𝑖 is the distance deviation between the two aligned residues at position 𝑖
and 𝑑0 is a normalization constant depending on only protein length. TM-score
ranges from 0 to 1 and the higher the more conserved the aligned position is.
When the alignment state at position 𝑖 is gap, the local TM-score is equal to 0 and
wi is equal to 0 at a gap position.
To differentiate the degree of conservation in the alignment, we train the CNF
model by maximizing the expected TM-score. The expected TM-score of one
threading alignment is defined as follows.
𝑄 =1
𝑁(𝐴)∑ (𝑤𝑖𝑀𝐴𝐺𝑖)𝑖 (17)
WhereN(A) is the smaller length of the two proteins and MAGi is the marginal
alignment probability at alignment position i. Since wi is equal to 0 at a gap
position, Eq. (17) de facto sums the marginal alignment probabilities at all the
alignment positions with the match state (i.e., state 𝑀). Given two residues of a
protein pair, their marginal alignment probability is equal to the accumulative
probability of all the possible alignments of this protein pair in which these two
residues are aligned to each other. The marginal alignment probability can be
calculated efficiently using the forward-backward algorithm (Lafferty, et al.,
2001). Eq. (17) is similar to the definition of TM-score except that the latter does
not have a term for the marginal alignment probability. By maximizing Eq. (17),
we weigh more on those aligned residue pairs with higher local TM-score (i.e.,
more conserved residue pairs) instead of treating all the aligned residue pairs
equally. We term this method as quality-sensitive training method. The central
problem of quality-sensitive training method is to calculate the gradient of Eq.
(17). Next I will introduce the algorithm details.
Given an alignment, A = {a1, a2, … , aLA} , let A[i, LA] = {ai, ai+1, … , aLA} denote a
left-partial alignment starting with the N-terminal end to position 𝑖 and let
A[i, LA] = {ai, ai+1, … , aLA} denote a right-partial alignment starting from the C-
terminal end to position 𝑖. Let 𝑥 and 𝑦 denote the number of target and template
residues contained in the left-partial alignment 𝐴[1, 𝑖], respectively. Both 𝑥 and 𝑦
can also be treated as the residue indices in the target and template proteins,
respectively. Therefore, each alignment position index 𝑖 is associated with a pair
of residue indices 𝑥 and 𝑦. Let 𝑚 and 𝑛 denote the number of residues in the
target and template proteins, respectively. In total there are 𝑚𝑛 possible pairs of
residue indices. Note that when alignment position 𝑖 corresponds to a pair of
residue indices 𝑥 and 𝑦, the alignment position 𝑖 − 1 may correspond to one of

38
the three possible residue index pairs (𝑥 − 1, 𝑦 − 1) , (𝑥, 𝑦 − 1) or (𝑥 − 1, 𝑦) ,
depending on the alignment state at position 𝑖.
Gradient calculation. Let 𝐹𝑖𝑣 denote the accumulative probability of all possible
left-partial alignments ending at alignment position 𝑖 with state 𝑣. Similarly, let
𝐵𝑖𝑢 denote the accumulative probability of all possible right-partial alignments
ending at alignment position 𝑖 with state 𝑢 . 𝐹𝑖𝑣 and 𝐵𝑖
𝑢 are the forward and
backward functions, which have been extensively described in the sequence
alignment literature. Sometimes, we also write Fiv as Fx,y
v or 𝐵𝑖𝑢 as 𝐵𝑥,𝑦
𝑢 when it is
necessary to explicitly spell out the residue indices. Both 𝐹𝑖𝑣 and 𝐵𝑖
𝑢 can be
calculated recursively as follows.
𝐹𝑖𝑣 = ∑ 𝐹𝑖−1
𝑢 𝑒𝑥𝑝(𝐸(𝑎𝑖−1 = 𝑢, 𝑎𝑖 = 𝑣, 𝑆, 𝑇))𝑢 (18)
𝐵𝑖𝑢 = ∑ 𝐵𝑖+1
𝑣 𝑒𝑥𝑝(𝐸(𝑎𝑖 = 𝑢, 𝑎𝑖+1 = 𝑣, 𝑆, 𝑇))𝑣 (19)
The marginal alignment probability 𝑀𝐴𝐺𝑖 can be calculated as follows.
𝑀𝐴𝐺𝑖 =𝐹𝑖𝑀𝐵𝑖
𝑀
𝑍 (20)
Meanwhile, the normalization factor 𝑍 (i.e., partition function) is equal to
∑ 𝐹𝑖𝑢𝐵𝑖
𝑢𝑢 for any 𝑖. In particular, we have
𝑍 = ∑ 𝐹𝑚,𝑛𝑢 = ∑ 𝐵1,1
𝑢𝑢𝑢 (21)
𝑀𝐴𝐺𝑖 depends on the model parameter θ, so we only need to calculate 𝜕𝑀𝐴𝐺𝑖
𝜕𝜃 in
order to calculate the gradient. Based upon Eq. (20), we have
∂MAGi
∂θ=
∂
∂θ(FiMBi
M
Z) =
∂FiM
∂θ
BiM
Z+
∂BiM
∂θ
FiM
Z-FiMBi
M
Z
∂Z
∂θ (22)
Since Z = ∑ Fm,nu
u , we have 𝜕𝑍
𝜕𝜃= ∑
∂𝐹(𝑚,𝑛)𝑢
∂θ𝑢 . That is, ∂MAGi
∂θ depends on only
𝜕𝐹𝑖𝑀
𝜕𝜃 and
𝜕𝐵𝑖𝑀
𝜕𝜃. For the purpose of simplicity, let 𝐸𝑖
𝑢→𝑣 denote 𝐸(𝑎𝑖−1 = 𝑢, 𝑎𝑖 = 𝑣, 𝑆, 𝑇) (see
Eq. (13-15)). By Eq. (18), we have
𝜕𝐹𝑖
𝑣
𝜕𝜃= ∑ (
𝜕𝐹𝑖−1𝑢
𝜕𝜃𝑒𝑥𝑝(𝐸𝑖
𝑢→𝑣) + 𝑒𝑥𝑝(𝐸𝑖𝑢→𝑣)
𝜕𝐸𝑖𝑢→𝑣
𝜕𝜃𝐹𝑖−1𝑢 )𝑢 (23)
Eq. (23) indicates that 𝜕𝐹𝑖
𝑣
𝜕𝜃 can be calculated recursively. Similarly,
𝜕𝐵𝑖𝑢
𝜕𝜃 can also be
calculated recursively. Since 𝐸𝑖𝑢→𝑣 is a neural network,
𝜕𝐸𝑖𝑢→𝑣
𝜕𝜃 can be calculated
using the gradient chain rule with time complexity depending on the
architecture of the neural network. The size of the neural network is determined
by the number of features, the window size, and the number of hidden neurons,
but independent of protein length. As such, we can assume the size is a large
constant. There are, in total, 𝑚𝑛 possible residue index pairs for the alignment

39
position 𝑖 in 𝐹𝑖𝑣 and 𝐵𝑖
𝑢 , so the time complexity of the gradient calculation is
𝑂(𝑚𝑛), the product of the target and template protein lengths.
The expected TM-score in Eq. (17) is not concave, so it is challenging to optimize
it to globally optimal. Here we use the L-BFGS (Limited memory BFGS (Malouf,
2002)) algorithm to solve it to suboptimal. To obtain a good solution, we run L-
BFGS several times starting from different initial solutions and use the best
suboptimal solution as the final. In order to use the L-BFGS algorithm, we need
to calculate the gradient of Eq. (17), which is detailed in the supplementary file.
In addition, we obtained the best performance when using 12 hidden neurons in
the hidden layer for all the different neural networks in both edge and label
functions in Eq. (14).
Protein Features
We generate position-specific score matrix (PSSM) for a template and position
specific frequency matrix (PSFM) for a target using PSI-BLAST with five
iterations and E-value 0.001. Let 𝑃𝑆𝑆𝑀(𝑖, 𝑎𝑎) denote the mutation potential for
amino acid aa at template position 𝑖 and 𝑃𝑆𝐹𝑀(𝑗, 𝑎𝑎) the occurring frequency of
amino acid aa at target position 𝑗.
Features for match state. We use the following features to estimate the alignment
probability of two residues:
Sequence profile similarity. The profile similarity between two positions is
calculated as ∑ 𝑃𝑆𝑆𝑀(𝑖, 𝑎)𝑃𝑆𝐹𝑀(𝑗, 𝑎)𝑎 . In addition, we also calculate sequence
similarity using the Gonnet matrix (Gonnet, et al., 1992) and BLOSUM62.
Amino acids substitution matrix. We use two matrices. One is the matrix
developed by Kihara group (Tan, et al., 2006) and the other is a structure-based
substitution matrix. Each entry in Kihara’s matrix measures the similarity
between two amino acids using the correlation coefficient of their contact
potential vectors. The contact potential vector of one amino acid contains 20
elements, each indicating the contact potential with one of the 20 amino acids.
The structure-based substitution matrix (Tan, et al., 2006) is more sensitive than
BLOSUM for the alignment of distantly-related proteins.
Secondary structure score. The secondary structure similarity between the target
and template is evaluated in terms of both the 3-class and 8-class types. We
generate secondary structure types of the template using DSSP (Kabsch and
Sander, 1983). We also predict the 3-class and 8-class secondary structure types
for the target using PSIPRED and our in-house tool RaptorX-SS8 (Wang, et al.,
2011), respectively.

40
Solvent accessibility score. We discretize the solvent accessibility into three
equal-frequency states: buried, intermediate and exposed. The equal-frequency
method is the best among several discretization methods we tested. We use our
in-house tool to predict the solvent accessibility state of the target and DSSP to
calculate the template solvent accessibility. Let sa denote the solvent accessibility
type on the template. The solvent accessibility similarity is defined as the
predicted likelihood of the target residue being in sa.
Environment fitness score. This score measures how well to align one sequence
residue to a specific template environment. The environment of a template
residue is defined as the combination of its solvent accessibility state and 3-class
secondary structure type, which results in 9 environment types.
Neighborhood similarity score. It was shown that conserved positions tend to
cluster together along the sequence. That is, if two residues can be aligned it is
likely that the residues around them can also be aligned. Therefore, we can use
the neighborhood information to estimate the likelihood of two residues being
aligned. The neighborhood information used in our model includes sequence
profile, secondary structure and solvent accessibility in a window of size 11.
Residues in two terminals. Residues at the two terminals may not have
sufficient neighborhood information and thus, needs some special handling. We
use one binary variable to indicate if one residue is at the two terminals or not.
Disordered region. Disordered regions are natively unfolded or intrinsically
unstructured, lacking stable tertiary structure and the predicted accuracy at those
regions is very low. Therefore, we cannot use the structure information (e.g.,
secondary structure and solvent accessibility) to align/un-align disordered
regions because it might introduce more false positive. We use DISOPRED
(Ward, et al., 2004) to predict disordered regions in a sequence, which also
produces a confidence score, ranging from 0 to 9, to indicate how likely a residue
is in a disordered region. The higher confidence score, the more likely a residue
being in a disordered region. We deem a residue to be in a disordered region if
the confidence score is 9. When aligning disordered residues, only sequence
information is used and all the predicted structure information is ignored (i.e.,
their relevant feature values are set to 0).
Features for gap state. We do not use an affine gap penalty, which is being
extensively used in many sequence alignment programs. Instead, we use both
position-specific and context-specific features to estimate gap probability. The
position-specific features are derived from the sequence homologs of a given
protein while the context-specific features include amino acid identify,
hydropath index, both 3-class and 8-class secondary structure and solvent

41
accessibility. We also use a head and tail gap feature to indicate if a gap appears
at the two terminals or in the middle of a protein.
4.3 Results
Training data. We constructed the training and validation data sets from PDB25
downloaded from PISCES (Wang and Dunbrack, 2003). Any two proteins in
PDB25 shares less than 25% sequence identity. A set of 1010 protein pairs is built
from PDB25 as the training data, which covers most of the SCOP fold classes.
Another set of 200 protein pairs is constructed from PDB25 as our validation data.
There is no redundancy between the training and validation data sets (i.e., <25%
sequence identity). The structure alignments (i.e., reference alignments) for the
training and validation data are built by our in-house structure alignment tool
DeepAlign.
Test data. We use the following 4 test sets.
1. In-House benchmark. A large in-house set consists of 3600 protein pairs from
PDB25. This set has no redundancy with our training and validation data (i.e., <
25% sequence identity). It is constructed so that 1) it contains all protein classes
(alpha, beta and alpha-beta proteins); 2) the protein NEFF values are almost
uniformly distributed; 3) the protein length is widely distributed; and 4) TM-
scores of all the pairs are spread out between 0.5 and 0.7.
2. MUSTER benchmark (Wu and Zhang, 2008). It contains all the training data
used by the MUSTER threading program, consisting of 110 hard ProSup pairs
and another 190 pairs selected by Zhang group, each pair having TM-score > 0.5.
3. SALIGN benchmark (Braberg, et al., 2012), It contains 200 protein pairs, each of
which shares ~20% sequence identity and ~65% of structurally equivalent
residues with RMSD <3.5 Å. Many protein pairs in this set contain proteins of
very different size, which makes it very challenging for any threading methods.
4. ProSup benchmark (Lackner, et al., 2000). This set consists of 127 protein pairs.
Programs to compare. We compare our CNF threading method, denoted as
CNFpred, with the top-notch profile-based and threading methods such as
HHpred, SPARKS/SP3/SP5, SALIGN, RAPTOR and BThreader. We use the
published results for SPARKS/SP3/SP5 since they have their own template file
formats and we cannot correctly run the programs locally. We use the published
result for SALIGN since it is unavailable. We also compare our program with
MUSTER. We focus on comparing our CNFpred with HHpred and BThreader
since the latter two performed extremely well in the most recent CASP
competition in 2010.

42
Evaluation criteria. We evaluate the threading methods using both reference-
dependent and reference-independent alignment accuracy. The reference-
dependent accuracy is defined as the percentage of correctly aligned positions
judged by the reference alignments. For all the benchmarks we use 4 structure
alignment tools to generate reference alignments, including TM-align, Matt, Dali
(Holm and Sander, 1995) and our in-house structure alignment tool DeepAlign.
Besides, the ProSup and MUSTER benchmarks have their own reference
alignments. To avoid bias towards a specific structure alignment tool, we
evaluate threading alignment accuracy using all of the reference alignments
mentioned above. Note that our CNFpred is trained using only the structure
alignments generated by our in-house tool DeepAlign. To evaluate the reference-
independent alignment accuracy, we build a 3D model for the target protein
using MODELLER (Eswar, et al., 2006; Fiser and Šali, 2003) from its alignment to
the template and then evaluate the quality of the resultant 3D model using TM-
score. TM-score ranges from 0 to 1, indicating the worst and best model quality,
respectively.
Table 13. Reference-dependent alignment accuracy on the In-House benchmark.
Columns 2-5 indicate four different reference alignment generation tools. Bold
indicates the best performance.
Reference-dependent alignment accuracy. As shown in Tables 13-17, CNFpred
outperforms all the others regardless of the reference alignments used. The
advantage of CNFpred over the popular profile-profile alignment method
HHpred increases with respect the hardness of the benchmark. For example, on
the most challenging In-House benchmark the relative improvement of CNFpred
over HHpred is more than 20%. Even on the easiest ProSup benchmark the
relative improvement of CNFpred over HHpred is ~10%. Our old threading
program BThreader works well on the ProSup and SALIGN sets, but not as well
on the MUSTER and In-House benchmarks. On these two benchmarks,
BThreader has similar performance as HHpred (global alignment), but much
worse than CNFpred. CNFpred has a smaller advantage on SALIGN because it
contains many proteins with symmetric domains, which have several good
alternative alignments. However, we only use the first alignments generated by
the structure alignment tools as the reference alignments. Therefore, even if the
Methods TMalign Dali Matt DeepAlign HHpred(Local) 32.63 36.60 35.53 35.47
HHpred(Global) 38.80 43.65 42.48 42.78 BThreader 37.44 41.85 40.17 40.95 CNFpred 37.44 51.77 49.98 51.19

43
threading alignments are pretty good, they may still have very low accuracy
when judged by the “non-perfect” reference alignments.
Table 14. Reference-dependent alignment accuracy on the MUSTER benchmark.
Columns 2-5 indicate four different reference alignment generation tools.
Column “BR” indicates the reference alignments provided in the benchmark. The
result of the program MUSTER is the training accuracy taken from (Wu and
Zhang, 2008). All the other numbers are test accuracy. Bold indicates the best
performance.
Table 15. Reference-dependent alignment accuracy on the SALIGN benchmark.
The results of SALIGN, RAPTOR and SPARKS, SP3 and SP5 are taken from
(Peng and Xu, 2009; Xu, et al., 2003). Bold indicates the best performance.
Columns 2-5 correspond to four different reference alignment generation tools.
Table 16. Reference-dependent alignment accuracy on the ProSup benchmark.
Columns 2-5 correspond to four different reference alignment generation tools.
Column “BR” denotes the reference alignment provided in the benchmark. The
results of SALIGN, RAPTOR and SPARKS, SP3 and SP5 are taken from (Peng
and Xu, 2009; Xu, et al., 2003). Bold indicates the best performance.
Methods TMalign Dali Matt DeepAlign BR HHpred(Local) 42.96 57.34 46.00 46.50 45.34
HHpred(Global) 48.82 53.13 51.48 52.48 51.48 BThreader 47.35 51.30 50.13 50.53 50.01 CNFpred 54.17 58.46 57.26 59.14 57.06
Methods TMalign Dali Matt DeepAlign SPARKS 53.10 - - - SALIGN 56.40 - - - RAPTOR 40.00 - - -
SP3 56.30 - - - SP5 59.70 - - -
HHpred(Local) 60.64 62.94 62.97 63.16 HHpred(Global) 62.98 63.14 63.87 63.53
BThreader 64.40 63.13 63.05 64.09 CNFpred 66.73 67.95 68.17 69.50
Methods TMalign Dali Matt DeepAlign BR
SPARKS - - - - 57.2
SALIGN - - - - 58.3
RAPTOR - - - - 61.3
SP3 - - - - 65.3
SP5 - - - - 68.7

44
Table 17. Reference-independent alignment accuracy, measured by TM-score, on
the four benchmarks: In-House, MUSTER, SALIGN and ProSup. The result of the
program MUSTER is its training accuracy (Wu and Zhang, 2008). All the other
numbers are test accuracy. Bold indicates the best performance.
Reference-independent alignment accuracy. Tested on the much more
challenging In-House benchmark, we obtain a TM-score of 1693, which is more
than 10% better than HHpred and BThreader In addition, on SALIGN and
Prosup, our CNFpred obtains total TM-score of 134.5 and 67.34, respectively. By
contrast, HHpred has TM-score of 121.83 and 56.44, respectively, as shown in
Table 17.
Alignment accuracy with respect to the sparsity of sequence profile. To further
examine the performance of CNFpred, BThreader and HHpred with respect to
the amount of homologous information, we divide the protein pairs in the In-
House benchmark into 9 groups according to the minimum NEFF value of a
protein pair and calculate the average TM-score of the target models in each
group. As shown in Figure 10 (A), when NEFF is small (i.e., proteins have sparse
sequence profile), our method exceeds BThreader and HHpred significantly. We
also divide all the protein pairs in the benchmark into 4 groups according to the
NEFF values of two proteins in a pair using the threshold 6. As shown in Fig. 10
(B), when the NEFF values of both proteins in a pair are small (<6), our method is
33% better than HHpred. When one of the two proteins in a pair has NEFF less
than 6, our method is 25% better than HHpred. Even when both proteins in a
pair have NEFF values larger than 6, which indicates both proteins have
HHpred(Local) 57.53 60.58 60.61 60.36 64.90
HHpred(Global) 61.84 65.31 64.52 65.29 69.04
BThreader 60.87 64.89 63.97 64.26 76.08
CNFpred 66.26 71.16 71.06 72.01 77.09
Methods In-House MUSTER SALIGN ProSup HHpred (Local) 1047.56 108.84 119.97 53.88 HHpred (Global) 1522.77 142.00 121.83 56.44
MUSTER - 136.47 - - BThreader 1537.89 143.95 132.85 66.77 CNFpred 1692.17 152.14 134.50 67.34

45
sufficient homologous information, our method still outperforms HHpred
slightly. In summary, our method is especially good for proteins with sparse
sequence profile.
(A) (B)
Figure. 10. Reference-independent alignment accuracy with respect to sparsity of
sequence profile (i.e., NEFF). (A) NEFF is divided into 9 bins. (B) NEFF is divided
into two bins at the threshold 6.
Alignment accuracy with respect to protein classes and lengths. As shown in
Figure 11, our method is superior to others across all protein classes and length.
Our method does especially well for all-beta proteins because our method can
make use of structure information in a better way.
(A) (B)
Figure. 11. (A) Reference-independent alignment accuracy with respect to (A)
protein class and (B) protein length. A protein with less than 150 amino acids is
treated as small; otherwise as large.
Threading performance with different features. Table 17 lists the alignment
quality measured by TM-score when different protein features are used. The
results are obtained by training with the same data mentioned before and testing
on our In-House benchmark. This benchmark is challenging so that it is easier to
show the difference of different features and training approaches. For Maximum

46
Likelihood and quality-sensitive training, we run Viterbi algorithm to generate
alignments and for Maximum A Posteriori we run Maximum Expected Accuracy
(MAC) algorithm (Söding, 2005) to generate alignments. We evaluate the
contribution of 8-class second structure and 3-class solvent accessibility and treat
sequence profile and 3-class secondary structure as the base control. As is shown
in Table 18, 8-class secondary structure and 3-class solvent accessibility improves
the alignment accuracy by 0.01 and 0.02, respectively, no matter which training
approaches are used. The predicted solvent accessibility improves the alignment
accuracy the most. The MAP training method improves the accuracy by 0.01 over
the Maximum Likelihood method while the quality-sensitive method improves
the accuracy by 0.01 over the MAP method. The quality-sensitive method
significantly improves the overall performance.
Table 18. The contribution of adding different features and using different
training methods testing on our In-House benchmark.
a Using profile relating and 3-class secondary structure features
b Using profile relating and 3-class secondary structure features plus 8-class secondary structure features.
c Using profile relating and 3-class secondary structure features plus solvent accessibility features.
d Using profile relating and 3-class secondary structure features plus both 8-class secondary structure and solvent
accessibility features.
Threading performance on a large set. We tested CNFpred and HHpred on a
fairly large set constructed from PDB25. All the ~6000 proteins in PDB25 are used
as templates and 1000 of them are randomly chosen as the target set. We run
CNFpred and HHpred to predict the 3D structure for each of the 1000 targets
using all the ~6000 templates. We run HHpred using his “realign” option. By
using that HHpred first run local alignment to search the database and then use
global alignment to re-align templates and targets. When predicting structure for
one specific target protein, the target itself is removed from the template list.
After generating alignments for a specific target, CNFpred ranks the templates
using a neural network, which predicts the quality (i.e., TM-score) of an
alignment. The template with the best predicted quality is used to build a 3D
model for the target. HHpred is run with the default options. As shown in Fig. 12
(A), CNFpred is significantly better than HHpred when the targets are not so
easy (i.e., the HHpred model has TM-score <0.7). On the 1000 targets, CNFpred
and HHpred obtain overall TM-score of 558 and 515, respectively. If we exclude
the 170 easy targets (i.e., either CNFpred or HHpred model has TM-score >0.8)
Feature Maximum Likelihood Maximum A Posteriori Quality-Sensitive Profile + SS3𝑎 1536.01 1578.60 1612.44
+SS8𝑏 1567.81 1595.72 1637.64 +SA𝑐 1606.68 1616.04 1662.12
+SS8 + SA𝑑 1633.32 1664.28 1692.17

47
from consideration, the overall TM-score obtained by CNFpred and HHpred are
416 and 375, respectively. That is, CNFpred is ~10.9% better than HHpred. As
shown in Fig. 12(B), the number of targets for which CNFpred generates models
better than HHpred by at least 0.05 TM-score is 329 while HHpred is better than
CNFpred by this margin for only 76 targets. Furthermore, the number of targets
for which CNFpred generates models better than HHpred by at least 0.10 TM-
score is 192 targets while HHpred is better than CNFpred by this margin for only
27 targets. In summary, CNFpred has very large advantage over HHpred on
hard targets.
(A) (B)
Figure. 12. (A) TM-scores of the CNFpred and HHpred models for the 1000
targets from PDB25. Each point represents 2 models generated by CNFpred and
HHpred, respectively. (B) Distribution of the TM-score difference of two 3D
models for the same target. Each blue (red) column shows the number of targets
for which CNFpred (HHpred) is better by a given margin.
4.4 Conclusion
In this chapter I has presented a novel conditional neural fields (CNF) model for
protein threading of proteins with sparse sequence profile. Our CNF method can
take advantage of as many correlated sequence and structure features as possible
to improve alignment accuracy. We also presents a quality-sensitive training
method to improve alignment accuracy, as opposed to the standard maximum-
likelihood method. Although using many features and a nonlinear scoring
function, our CNF method still can efficiently generate the optimal alignments by
dynamic programming. It takes only seconds to thread a typical protein pair.
Experimental results demonstrate that our CNF method can greatly improve

48
alignment accuracy over other CASP-winning programs, regardless of
benchmarks, reference alignments, protein classes and lengths. Currently, our
CNF model only considers state transition between two adjacent positions. We
can also model pairwise interaction between two non-adjacent positions, but it is
computationally challenging to train such a model. Some approximation
algorithms may be resorted.
Homologous information is very effective in detecting remote homologs, as
evidenced by the profile-based method HHpred, which performed better than
many threading methods in recent CASP events. It shows that homologous
information is not sufficient for proteins with sparse sequence profile (i.e., low
NEFF). Our method can improve alignment accuracy over profile-based methods
by using more structure information, especially for proteins with sparse
sequence profile. Cowen group takes a rather different method, called simulated
evolution, to enrich sequence profile and shows that the alignment accuracy can
be improved for some proteins (Kumar and Cowen, 2009). The capability of
predicting structures for proteins with sparse sequence profile is very important.
Simple statistics indicate that among the ~6877 Pfam families (Bateman, et al.,
2004) without solved structures, 79.2%, 63.7%, 45.5% and 25.4% have NEFF ≤ 6, 5,
4, and 3, respectively, and of the 5332 Pfam families with solved structures, ~57%
have NEFF <6. In addition, ~25% of the protein sequences in Uniprot
(Consortium, 2011) are not covered by Pfam (ver 25.0). A significant number of
these sequences are singletons (i.e., products of orphan genes) and, thus, have
NEFF=1. Many low-homology proteins and families (NEFF ≤ 6) will continue to
be lack of solved structures in the foreseeable future. Therefore, our CNF
threading method shall be useful for a large percentage of protein sequences
without solved structures.

49
Chapter 5 Protein Alignments Using
Context-Specific Potential
5.1 Introduction
In this chapter I will introduce a novel context-specific alignment potential for
protein threading including both alignment and template selection. Our
alignment potential measures the log odds ratio of one alignment being
generated from two related proteins to being generated from two unrelated
proteins, by integrating context-specific information. An alignment is assumed to
be optimal if it maximizes its potential. The alignment potential quantifies how
well one sequence residue can be aligned to one template residue based upon
context-specific information of these two residues. We need a potential function
because we need to eliminate the bias caused by background probability. As
shown in Figure 13, proper alignment potential function can eliminate the bias
introduced by the training datasets as well as sequence length. Generally
speaking, the alignment potential function tends to keep the relatively conserve
aligned regions and makes shorter alignments. This makes the ranking algorithm
select the templates much easier. Experimental results show that our context-
specific alignment potential is much more sensitive than the widely used context-
independent or profile-based (which is position-specific) scoring function,
generating significantly better alignments and threading results than the best
profile-based methods on several very large benchmarks. Our method works
particularly well for distantly-related proteins or proteins with sparse sequence
profiles due to the effective integration of context-specific, structure and global
information.

50
Figure 13. Different protein alignments under different alignment scoring
functions. The left one does not consider the background probability. The right
one uses an alignment potential function considering the background
probability.
5.2 Methods
Protein Alignment Potential Function
We represent one alignment A between two proteins as a sequence of alignment
states 𝑎1, 𝑎2, … , 𝑎𝐿 where L is the alignment length and 𝑎𝑖 is the alignment state at
position 𝑖 . There are three possible alignment states 𝑀 , 𝐼𝑡 and 𝐼𝑠 where 𝑀
represents two residues being aligned, 𝐼𝑡 denotes an insertion in the template,
and 𝐼𝑠 denotes an insertion in the sequence.
Similar to many amino acid substitution matrices such as BLOSUM and PAM,
which defines the mutation potential of two amino acids, we define the potential
of one protein alignment. Given a protein sequence 𝑆 and a template 𝑇 and one
of their alignments 𝐴, let 𝑃(𝐴|𝑆, 𝑇) denote the probability of A being generated
from 𝑆 and 𝑇 using our alignment method. We define the potential of 𝐴, denoted
as 𝑈(𝐴|𝑆, 𝑇), as follows.
𝑈(𝐴|𝑆, 𝑇) = 𝑙𝑜𝑔𝑃(𝐴|𝑆,𝑇)
𝑃𝑟𝑒𝑓(𝐴) (24)
Where 𝑃𝑟𝑒𝑓(𝐴) is the background (or reference) probability of 𝐴 , i.e., the
probability of 𝐴 being generated from two randomly-selected proteins with the
same lengths as 𝑆 and 𝑇, respectively. Intuitively, an alignment is good as long as
its probability is much better than the expected probability. We assume that an
alignment is optimal if it maximizes its potential. That is, given a sequence and a

51
template, we can find their optimal alignment by maximizing the alignment
potential function.
Here 𝑃(𝐴|𝑆, 𝑇) can be any function calculating the probability of alignment 𝐴
given two proteins 𝑆 and 𝑇. For example, it can be the Conditional Neural Field
model introduced in Chapter 4. It can also be the probabilistic graphical model of
MRFalign containing the long distance correlation between alignment states.
𝑃(𝐴|𝑆, 𝑇) can be defined as follows.
𝑃(𝐴|𝑇, 𝑆, 𝜃) =𝑒𝑥𝑝(𝐹(𝐴|𝑇,𝑆,𝜃)+𝑤∙𝐺(𝐴|𝑇,𝑆,𝜃))
𝑍(𝑇,𝑆,𝜃) (25)
Where 𝜃 is the model parameter vector to be trained, 𝑤 (=1.0) is a weight factor
and 𝑍(𝑇, 𝑆, 𝜃) is the normalization factor (i.e., partition function) summing over
all possible alignments for a given protein pair. For the purpose of simplicity, we
omit 𝜃 in the following sections unless we have to spell it out. The function 𝐹
estimates the log-likelihood of one sequence residue being aligned to one
template residue based upon the input protein features. The function G estimates
the log-likelihood of a pair of sequence residues being placed into two template
positions at a given distance based upon the input protein features. The functions
𝐹 and 𝐺 are just the node alignment potential function and edge alignment
function introduced in Chapter 3.
We can train their parameters by maximum-likelihood. That is, given a set of
training protein pairs and their reference alignments (built by a structure
alignment tool), we maximize their occurring probability defined by Eq. (25).
However, since 𝐺(𝐴|𝑇, 𝑆) is a global alignment function, it is computationally
hard to directly maximize Eq. (25). In addition, it may cause over-fitting by
training the parameters of 𝐹 and 𝐺 simultaneously since the parameter space is
very big. To avoid these problems we determine the parameters of functions 𝐹
and 𝐺 separately, which will be explained in the following sections.
Reference state. We can calculate the reference alignment probability 𝑃𝑟𝑒𝑓(𝐴) in
Eq. (24) by randomly sampling a set of protein pairs, each with the same lengths
as the sequence 𝑆 and template 𝑇 , respectively, and then estimating the
probability of alignment 𝐴 based upon these randomly sampled protein pairs. As
long as we generate sufficient number of samplings, we shall be able to
approximate 𝑃𝑟𝑒𝑓(𝐴) very well. Here we use the geometric mean to approximate
the reference state as follows.
𝑃𝑟𝑒𝑓(𝐴) = √∏ 𝑃(𝐴|𝑋, 𝑌)𝑁𝑖=1
𝑁 (26)

52
Where N is the number of samplings and 𝑋 and 𝑌 represent two sampled
proteins with the same lengths as 𝑆 and 𝑇, respectively. Combining Eq. (24-26),
the potential of one alignment 𝐴 can be calculated as follows.
𝑈(𝐴|𝑆, 𝑇) = 𝑙𝑜𝑔𝑃(𝐴|𝑆, 𝑇)
𝑃𝑟𝑒𝑓(𝐴)
= 𝑙𝑜𝑔𝑃(𝐴|𝑆, 𝑇)
√∏ 𝑃(𝐴|𝑋, 𝑌)𝑁𝑖=1
1/𝑁
= 𝑙𝑜𝑔𝑒𝑥𝑝(𝐹(𝐴|𝑇,𝑆)+𝑤∙𝐺(𝐴|𝑇,𝑆))/𝑍(𝑆,𝑇)
√∏ 𝑒𝑥𝑝(𝐹(𝐴|𝑋,𝑌)+𝑤∙𝐺(𝐴|𝑋,𝑌))𝑁𝑖=1 /𝑍(𝑋,𝑌)
𝑁 (27)
Note that an alignment is represented as a sequence of 3 states (match 𝑀 ,
insertion at sequence 𝐼𝑠 and insertion at template 𝐼𝑡 ). Therefore, given two
sequence-template pairs (𝑆 , 𝑇) and (𝑋 , 𝑌), as long as 𝑆 and 𝑇 have the same
lengths as 𝑋 and 𝑌, respectively, the alignment space (i.e., the set of all possible
alignments) for 𝑆 and 𝑇 is same as that for 𝑋 and 𝑌. That is, any 𝑆-to-𝑇 alignment
is also a feasible alignment between 𝑋 and 𝑌, although it may have different
probabilities. Conversely, any 𝑋 -to-𝑌 alignment is also a feasible alignment
between 𝑆 and 𝑇.
By definition, 𝑍(𝑆, 𝑇) is equal to the alignment space size times the mean value of
the denominator in Eq. (25). Since 𝑆 and 𝑇 have the same alignment space as 𝑋
and 𝑌, 𝑍(𝑆, 𝑇) differs from 𝑍(𝑋, 𝑌) only in the mean values of their corresponding
denominators in Eq. (25), which is independent of any specific alignment, but
may depend on protein residue composition.
Therefore, we have
𝑈(𝐴|𝑆, 𝑇) = (𝐹(𝐴|𝑇, 𝑆) − 𝐸𝑋𝑃𝑋,𝑌𝐹(𝐴|𝑋, 𝑌))
+𝑤 ∙ (𝐺(𝐴|𝑇, 𝑆) − 𝐸𝑋𝑃𝑋,𝑌𝐺(𝐴|𝑋, 𝑌)) + 𝑐(𝑆, 𝑇) (28)
Where EXP is the expectation operator, 𝐹(𝐴|𝑇, 𝑆) − 𝐸𝑋𝑃𝑋,𝑌𝐹(𝐴|𝑋, 𝑌) can be
interpreted as node alignment potential and 𝐺(𝐴|𝑇, 𝑆) − 𝐸𝑋𝑃𝑋,𝑌𝐺(𝐴|𝑋, 𝑌) as edge
alignment potential.
In Eq. (28), 𝑐(𝑆, 𝑇) depends on only the residue composition of S and T but not
any specific alignment. In particular, 𝑐(𝑆, 𝑇) is equal to 0 if the sampled protein
pairs have similar residue composition as 𝑆 and 𝑇. As such, for the purpose of
finding the optimal alignment between 𝑆 and 𝑇, we can simply ignore 𝑐(𝑆, 𝑇).
Therefore, the key challenge is to determine the node and edge alignment
potential functions in the right hand side of Eq. (25).

53
5.3 Results
Training and validation data. We constructed the training and validation data
from BC40, a subset of PDB, in which any two proteins shares less than 40%
sequence identity. In total we use a set of 1800 protein pairs as the training data,
which covers most of the folds in the SCOP database, and a set of 500 protein
pairs as the validation data. There is no redundancy between the training and
validation data (i.e., <40% sequence identity). The training and validation data
has the following properties: 1) All the proteins have length less than 400 and
contain less than 10% of residues with missing coordinates; 2) The TM-score of a
protein pair is uniformly distributed from 0.55 to 1; and 3) We use our in-house
structure alignment tool DeepAlign to generate the reference alignment for a
protein pair. Each alignment has fewer than 50 middle gaps and the number of
terminal gaps is <20% of the alignment length.
Test data for alignment. We use the following 3 datasets to test the alignment
accuracy of our method.
1. Set6K: a set of ~6000 protein pairs. Any two target proteins in this set share
<40% sequence identity. The TM-score of a protein pair is uniformly distributed
between 0.55 and 0.8. Two proteins in a pair have small length difference. The
protein pairs in Set6K have 5% of overlap with our training and validation data.
By “overlap” we mean that the proteins in one pair have sequence identity 30-
50% with those in another pair.
2. Set4K: a set of 4547 protein pairs. Any two target proteins in the set share <
25% sequence identity. The protein pairs in Set4K have 3% of overlap with our
training and validation data. Two proteins in a pair have length difference larger
than 30%, so this set can be used to test if the domain boundary is correctly
aligned or not.
3. Set180K: a very large set of 179,390 protein pairs. Any two proteins in most
pairs share <40% sequence identity. The TM-score of a protein pair is uniformly
distributed between 0 and 1. Note that the size of our training set is only 1% of
this large set, so the test result on this set is unlikely biased by the training set.
Test data for threading. We use the following 2 datasets to test the threading
accuracy of our method.
Set1000×6000: a large set constructed from PDB25, which consists of ~6000
proteins. All the proteins in PDB25 are used as templates and 1000 of them are

54
randomly chosen as the target proteins. We predict the 3D structure for all the
1000 targets using the ~6000 templates, but excluding self-threading.
CASP10: a set of 123 test proteins. We use the CASP official domain boundary
definition for each test protein.
Evaluation criteria and programs to compare. We evaluate our threading
method using both reference-dependent and reference-independent alignment
accuracy. The reference-dependent accuracy is defined as the percentage of
correctly aligned positions judged by the reference alignments, which are built
using our in-house tool DeepAlign. We also built the reference alignments using
other structure alignment tools such as DALI, Matt and TMalign and observed
similar performance trend. To evaluate the reference-independent alignment
accuracy, we build a 3D model for the target protein using MODELLER from its
alignment to the template and then evaluate the quality of the resultant 3D
model using TM-score. TM-score ranges from 0 to 1, indicating the worst and
best model quality, respectively. Since our ultimate goal is to predict 3D structure
for a target protein, reference-independent alignment accuracy is more important
than reference-dependent accuracy. We compare our method with the top-notch
profile-based method HHalign, which is run with the option “-mact 0.1”.
Table 19. Reference-dependent (Ref-dep) and reference-independent (Ref-ind)
alignment accuracy on two benchmarks Set6K and Set4K. Reference-independent
alignment accuracy is measured by TM-score.
Set6K Set4K
Ref-dep Ref-indTM Ref-dep Ref-ind
TM
Our work 52% 0.52 63% 0.62 HHalign 45% 0.44 57% 0.56
Table 20. Reference-dependent alignment accuracy on two benchmarks of Set6K
and Set4K.
Set6K Set4K
Ref-dep 4-position off Ref-dep 4-position off
Our work 52% 57% 63% 67% HHalign 45% 50% 57% 60%
As shown in Table 19, our method outperforms HHalign in terms of both
reference-dependent and reference-independent alignment accuracy on the two
benchmarks Set6K and Set4K. On these two sets, our method outperforms
HHalign by 13.6% and 9%, respectively, in terms of the model quality (i.e.,

55
reference-independent accuracy). However, in terms of reference-dependent
accuracy, our method is better than HHalign by only 8.8% and 5.2%, which is not
as big as reference-independent accuracy. To find out why, we calculate the
reference-dependent accuracy on Set6K and Set4K by allowing 4-position off the
exact match, as shown in Table 20, which indicates that our method is much
better than HHalign in terms of the reference-dependent accuracy when 4-
position off the exact match is allowed. This may explain why our method can
yield much better 3D model quality.
Table 21. Reference-dependent (Ref-dep) and reference-independent (Ref-ind)
alignment accuracy on the very large benchmark Set180K. Reference-
independent alignment accuracy is measured by TM-score. All the protein pairs
are divided into 4 groups depending on their structure similarity measured by
TM-score.
Ref-dependent Ref-independent
TM
TM-score HHalign Our work HHalign Our work 0.80-1.00 83% 84% 0.78 0.79 0.65-0.80 60% 62% 0.52 0.56 0.40-0.65 32% 35% 0.30 0.34 0.25-0.40 11% 19% 0.16 0.20
As shown in Table 21, on the very large Set180K set, our method yields slightly
better performance than HHalign when two proteins under consideration are
very similar. This is not surprising since most methods can generate pretty good
alignments for two closely-related proteins. When the TM-score of two proteins
under consideration falls into (0.65, 0.80), our method outperforms HHalign by
~3.3% in terms of the reference-dependent accuracy and by ~7.6% in terms of the
reference-independent accuracy. When the TM-score of two proteins under
consideration falls into (0.40, 0.65), our method outperforms HHalign by ~9.4% in
terms of the reference-dependent accuracy and by ~11.3% in terms of the
reference-independent accuracy.
When the TM-score of two proteins under alignment falls into (0.25, 0.40), our
method outperforms HHalign by a very large margin in terms of reference-
dependent alignment accuracy. However, in terms of the reference-independent
alignment accuracy, the advantage of our method is not as big, although it is still
substantial. This may be because that MODELLER cannot build a reasonable
model from an alignment with too many errors. That is, when the TM-score of
two proteins is less than 0.4, it may not be so important to generate an accurate
alignment for them since the resultant 3D model has low quality and thus, will
not be very useful.

56
Figure. 14. The quality of the models by our method and HHpred for the 1000
targets randomly chosen from PDB25. Each point represents two models
generated by our method (Y-axis) and HHpred (X-axis), respectively.
Threading performance on a large test set. We test the threading performance of
our method and HHpred on Set1000×6000. We run both our method and
HHpred to predict the 3D structure for each of the 1000 targets using the ~6000
templates. HHpred is run with its “realign” option. That is, HHpred first
searches through the template database using local alignment and then re-aligns
a target to the top templates using global alignment. By doing so, HHpred can
improve its modeling accuracy a little bit over the default mode. To speed up,
our method first aligns a target to all the templates using only the local alignment
potential and then ranks all the templates using both the local and global
alignment potentials described in section Methods. After ranking only the first-
ranked templates are used to build a 3D model by MODELLER for each target.
Figure. 15. Distribution of the model quality difference, measured by TM-score.
Each blue column shows the number of targets for which our method is better by
a given margin. Each red column shows the number of targets for which HHpred
is better by a given margin.

57
As shown in Figure 14, our method is significantly better than HHpred when the
targets are not so easy (i.e., the HHpred model has TM-score<0.7). On the 1000
targets, our method and HHpred obtain average TM-score 0.566 and 0.517,
respectively. Our method outperforms HHpred no matter whether the target is
easy or hard. If we exclude the 170 easy targets (i.e., either our model or HHpred
model has TM-score>0.8) from consideration, the accumulative TM-score
obtained by our method and HHpred are 0.524 and 0.451, respectively. That is,
our method is ~16.1% better than HHpred. Further, as indicated by the yellow
lines in Figure 14, our method can generate models with TM-score >0.5 for many
targets for which HHpred fails to generate a model with TM-score >0.5. We use
TM-score=0.5 as a cutoff because when a model has TM-score>0.5, its overall fold
is basically correct.
As shown in Figure 15, our method generates models better than HHpred by at
least 0.05 for 342 targets while HHpred is better than our method by this margin
for only 93 targets. Further, the number of targets for which our method
generates models better than HHpred by at least 0.10 is 197 while HHpred is
better than our method by this margin for only 49 targets. In summary, our
method has a large advantage over HHpred on hard targets.
Threading performance on CASP10 data set. We further evaluate the threading
performance of our method on the most recent CASP10 targets. We use the CASP
official domain boundary definition for each target and in total there are 123 test
proteins. To make the test as fair as possible, both our method and HHpred used
the same set of templates and the same protein sequence database (i.e., NR),
which were constructed before CASP10 started.
Figure. 16. The model quality, measured by TM-score, of our method and
HHpred for the 123 CASP10 targets. Each point represents two models generated
by our method (y-axis) and HHpred (x-axis), respectively.

58
As shown in Figure 16, similar to what we have observed on the large threading
test set, our method significantly outperforms HHpred when the targets are not
so easy. Our method generates a model with TM-score >0.5 for quite a few
targets for which HHpred fails to generate a model with TM-score>0.5. On the
whole test set, our method and HHpred obtain accumulative TM-score 77.52 and
70.65, respectively. If we exclude the “Server” targets from consideration and
only look at the more challenging “Human/Server” targets. The average TM-
score obtained by our method and HHpred are 0.63 and 0.57, respectively. That
is, our method is ~10.5% better than HHpred.
It is very challenging to fairly compare our single-template threading method
with the CASP10-participarting servers because that most of the CASP10 servers
used a hybrid method instead of an individual threading method. For example,
the first-ranked Zhang-Server integrated both consensus analysis of ~10
individual threading programs and fragment-based 3D model building
technique. The top-ranked HHpred server integrated new profile generation
method, multi-template alignment and a better 3D model building technique.
The top-ranked Robetta server used consensus results from three programs
including HHpred, RaptorX and SPARKS and also a very new 3D model
building method (citation here later). Our RaptorX server, which is ranked No. 2
overall, employed multiple-template threading, which can generate better 3D
models than single-template threading for many targets especially the easy ones.
In summary, the accumulative TM-score obtained by our single-template
threading method described in this paper is only 0.85 less than what was
obtained by RaptorX in CASP10. It can be ranked No.6 among all the CASP10-
participating servers.
P-value. It is desirable that any structure prediction program can assign a
confidence score to predicted models. Here we use P-value to quantify the
relative quality of the top-ranked templates and alignments. To calculate the P-
value, we employs a set of reference templates, which consists of ~1800 single-
domain templates with different SCOP folds. Given a target, we first thread it to
this reference template database and then estimate an extreme value distribution
from the ~1800 alignment scores (i.e., alignment potentials). Based upon this
distribution, we calculate the P-value of each alignment when threading the
target to the real template database. The P-value actually measures the quality of
the template (and the alignment) by comparing it to the reference templates.

59
Figure. 17. The relationship between P-value and the model quality on the 123
CASP10 targets. The x-axis is the model quality measured by max(GDT, uGDT)
and the y-axis is –log(P-value).
To measure the real model quality, we use both GDT (Global Distance Test)
(Zemla, et al., 1999) and uGDT (i.e., un-normalized GDT). GDT has been
employed as an official measure by CASP for many years. It measures the quality
of a model by comparing it with the native and outputs a value from 0 to 100,
indicating the worst and the best quality, respectively. uGDT is equal to GDT
times the target length divided by 100. uGDT is more suitable when the target
protein is relatively large or multi-domain and there are only good templates
covering a segment of the target (e.g., one of the domains). In this case, GDT is
likely to be quite small and not a good indicator even if the good templates are
identified since GDT is normalized by the whole target length. However, uGDT
is not good for a target with length<100. For example, when a target of 60
residues is covered by a template perfectly on 48 of the 60 residues, the uGDT of
this alignment is 48 while the GDT is 80. In this case, GDT is more suitable than
uGDT. In summary, we use max(uGDT, GDT) to measure the model quality. We
say one alignment is reasonable when its resultant model has uGDT or GDT
larger than 50. We use 50 as a cutoff because that many proteins similar at only
the fold level have GDT or uGDT around 50.
As shown in Figure 17, the P-value is a reliable indicator of model quality. When
P-value is small (i.e. <10-5), the models have uGDT or GDT greater than or equal
to 50. Even if P-value is less than 10-4, there are few models have both uGDT and
GDT less than 50. That is, the prediction from our threading method is reliable
when the P-value is less than 10-4.
Table 22. Contribution of pairwise potential to alignment accuracy, tested on two
benchmarks Set6K and Set4K. Reference-independent alignment accuracy is
measured by TM-score
Set6K Set4K
Ref-dep Ref-indTM
Ref-dep Ref-indTM
Local potential 49% 0.51 60% 0.61
Local + Pairwise 52% 0.52 63% 0.62

60
(A) (B)
Figure. 18. (A) Contribution of the distance-based pairwise alignment potential
to Set1000×6000. Each point represents the quality, measured by TM-score, of 2
models: one is generated using the local alignment potential only (X-axis) and
the other using both the local and global alignment potentials (Y-axis). (B)
Contribution of the distance-based pairwise alignment potential to the CASP10
set. Each point represents the quality, measured by TM-score, of 2 models: one is
generated using the local alignment potential only (X-axis) and the other using
both the local and global alignment potentials (Y-axis).
Contribution of the distance-based pairwise potential. To evaluate the
contribution of our pairwise potential to alignment accuracy, we calculate the
accuracy improvement resulting from using both our local and pairwise
potential over using only our local potential on two benchmarks Set6K and
Set4K. As shown in Table 22, our pairwise potential can improve reference-
dependent accuracy by 3% and reference-independent accuracy by 0.01,
respectively.
We also evaluate the contribution of our pairwise potential to template selection.
To speed up, we generate alignments using our local alignment potential and
then rank all the templates using a linear combination of our local and pairwise
alignment potentials (with equal weight). Experimental results on the 1000×6000
threading set and the CASP10 set indicate that the pairwise potential indeed
improves the threading performance, as shown in Figures 18 (A) and (B). On the
1000×6000 set, the average TM-score increases from 0.547 to 0.566 when the
pairwise potential is used to rank the templates. On the CASP10 set, the
accumulative TM-score increases from 75.58 to 77.52 when the pairwise potential
is used. As shown in Figures 18 (A) and (B), the context-specific pairwise
potential is particularly helpful to hard targets.

61
Case Study. Here we use two cases to further demonstrate the strength of our
method. Both of these two cases are from our Set6K benchmark. The first case is
to align two proteins 3qnrA and 2gffA, which have TM-score between 0.62-0.65
according to the structural alignments generated by TMalign, Matt, Dali and our
in-house tool DeepAlign. That is, these two proteins are similar in structures but
not very much in sequences. Meanwhile, 2gffA contains two alpha and two beta
segments which are very similar to one of the two domains of 3qnrA. As shown
in Figure 19, our method can correctly align >90% of the positions judged by the
reference alignment (regardless of which structural alignment tools are used to
generate it). In contrast, HHalign fails to align the 2nd alpha and beta segments.
This is partially because HHalign favors generating short alignment. If we
choose 3qnrA as the template to build a 3D model for 2gffA, the resultant models
from our method and HHalign have TM-score 0.63 and 0.25, respectively.
Figure. 19. Two alignments between 3qnrA and 2gffA generated by our method
and HHalign. The blue and red colors demonstrate correctly-aligned regions
judged by the reference alignment. To save space, only one of the domains of
3qnrA is shown.
Here we use another two proteins 3k53A and 1cb7A to show the case that our
method and HHalign generate two alignments of nearly the same length but our
alignment has much better quality. As shown in Figure 20, our method aligns
nearly 80% of positions correctly while HHalign fails to align any position
correctly. If we use 3k53A as the template to build models for 1cb7A, the
resultant 3D models from our method and HHalign have TM-score 0.64 and 0.22,
respectively. We can also examine the alignments visually. As shown in Fig. 21
(A) and (B), our method aligns the local structure very well while HHalign
seemingly produces a totally wrong alignment. In this case both 3k53A and
1cb7A have pretty good sequence profile information and the predicted
secondary structure for 1cb7A is also very accurate (>80%).

62
Figure. 20. The alignments between 3k53A and 1cb7A generated by our method
and HHalign. The blue and red colors indicate the correctly aligned regions.
(A) Our method (B) HHalign
Figure. 21. Superposition between protein 3k53A and 1cb7A based on the
alignments generated by our method and HHalign, respectively. The highlighted
regions indicate the aligned residues.
5.4 Conclusion
In this chapter I presented a novel context-specific alignment potential which
measures the log odds ratio of one alignment being generated from two related
proteins to being generated from two unrelated proteins. It can be used for both
protein alignment and protein threading, Intuitively, an alignment is regarded as
good only when its estimated probability is much higher than the expected. Our
alignment potential uses context-specific and structure information through
advanced machine learning techniques such as Conditional Neural Fields, which
can combine a variety of highly-correlated protein sequence and structure
features, without worrying too much about over-counting and under-counting of
features. Experimental results show that our context-specific alignment potential
is much more sensitive than the widely-used context-independent (e.g. profile-
based) scoring function and yields significantly better alignments and threading
results. Our method works particularly well for distantly-related proteins or
proteins with sparse sequence profiles due to the effective integration of context-
specific, structure and global information.

63
This chapter also shows that our context-specific distance-based pairwise
potential is helpful to protein threading, as opposed to the contact-based
potentials previously used by some protein threading methods. Combined with
our context-specific local alignment potential, our distance-based pairwise
potential can help improve both alignment accuracy and template selection
especially for hard targets.
Chapter 6 Protein Contact Prediction
by Integrating Joint Evolutionary
Coupling Analysis and Supervised
Learning
6.1 Introduction
Protein contacts contain important information for protein folding and recent
works indicate that one correct long-range contact for every 12 residues in the
protein allows accurate topology level modeling (Kim, et al., 2014). Thanks to
high-throughput sequencing and better statistical and optimization techniques,
evolutionary coupling (EC) analysis for contact prediction has made good
progress, which makes de novo prediction of some large proteins possible.

64
Nevertheless, contact prediction accuracy is still low even if only the top L/10 (L
is the sequence length) predicted contacts are evaluated.
Existing contact prediction methods can be roughly divided into two categories:
1) evolutionary coupling (EC) analysis methods, such as, that make use of
multiple sequence alignment; and 2) supervised machine learning methods, such
as SVMSEQ (Wu and Zhang, 2008), NNcon (Tegge, et al., 2009), SVMcon (Cheng
and Baldi, 2007), CMAPpro (Di Lena, et al., 2012), that predict contacts from a
variety of information including mutual information, sequence profile and some
predicted structure information. In addition, a couple of methods also use
physical constraints, such as PhyCMAP (Wang and Xu, 2013) and Astro-Fold
(Klepeis and Floudas, 2003).
Residue EC analysis is a pure sequence-based method that predicts contacts by
detecting co-evolved residues from the MSA (multiple sequence alignment) of a
single protein family. This is based upon an observation that a pair of co-evolved
residues is often found to be spatially close in the 3D structure. Mutual
information (MI) is a local statistical method used to measure residue co-
evolution strength, but it cannot tell apart direct and indirect residue interaction
and thus, has low prediction accuracy. Along with many more sequences are
available, some global statistical methods, such as maximum entropy and
probabilistic graphical models, are developed to infer residue co-evolution from
MSA. These global statistical methods can differentiate direct from indirect
residue couplings and thus, are more accurate than MI. See (de Juan, et al., 2013)
for an excellent review of EC analysis. Representative tools of EC analysis
include Evfold (Marks, et al., 2011), PSICOV (Jones, et al., 2012), GREMLIN
(Kamisetty, et al., 2013), and plmDCA (Ekeberg, et al., 2013). Meanwhile,
GREMLIN and plmDCA do not assume Gaussian distribution of a protein
family. All these EC methods make use of residue co-evolution information only
in the target protein family, ignoring other related families.
Supervised machine learning methods make use of not only mutual information
(MI), but also sequence profile and other protein features, as opposed to EC
analysis that makes use of only residue co-evolution. Experiments show that due
to use of more information, supervised learning may outperform EC methods
especially for proteins with few sequence homologs. Recently, a few groups such
as DNcon (Eickholt and Cheng, 2012), CMAPpro (Di Lena, et al., 2012) and
PConsC (Skwark, et al., 2013) have also applied deep learning, an emerging
supervised learning method, to contact prediction and showed some improved
performance.

65
In this chapter, I will present a new method CoinDCA (Ma, et al., 2015) (co-
estimation of inverse matrices for direct-coupling analysis) for contact prediction
that integrates joint multi-family EC analysis and supervised machine learning.
Since joint EC analysis and supervised learning use different types of
information, their combination shall lead to better prediction accuracy. The
contribution of this paper lies in two aspects. First, different from existing EC
analysis that makes use of residue co-evolution information only in the target
protein family, our joint EC analysis predicts contacts of a target family not only
using its own residue co-evolution information, but also those in its related
families which may share similar contact maps. By enforcing contact map
consistency in joint EC analysis, we can greatly improve contact prediction. To
fulfill this, we develop a statistical method called group graphical lasso (GGL) to
estimate the joint probability distribution of a set of related families and enforce
contact map consistency proportional to evolutionary distance. Second, we use
Random Forests, a popular supervised learning method, to predict the
probability of two residues forming a contact using a variety of evolutionary and
non-evolutionary information. Then we integrate the predicted probability as
prior into our GGL formulation to further improve the accuracy of joint EC
analysis. In Chapter 3 I mentioned that MI and DI could be used as features in
our framework to improve the quality of protein alignments. CoinDCA can also
be treated as a new kind of information source to advance protein alignments.
Experiments show that our method greatly outperforms existing EC or
supervised machine learning methods regardless of the number of sequence
homologs available for a target protein under prediction, and that our method
not only performs better on conserved contacts, but also on family-specific
contacts. We also find out that contact prediction may be worsened by merging
multiple related families into a single one followed by single-family EC analysis,
or by consensus of single-family EC analysis results.
6.2 Methods
Probabilistic Model of a Single Protein Family
Modeling a single protein family using a probabilistic graphical model has been
described in a few papers (Cheng and Baldi, 2007; Jones, et al., 2012; Marks, et al.,
2011). Here we briefly introduce it since it is needed to understand our joint
graphical model. Given a protein family k and the MSA (multiple sequence
alignment) of its sequences, let X denote this MSA where 𝑋𝑖𝑟𝑘 is a 21-dimension

66
binary vector indicating the amino acid type (or gap) at row 𝑟 (of this MSA) and
column 𝑖 and 𝑋𝑖𝑟𝑘 (𝑎) is equal to 1 if the amino acid at row 𝑟 (of this MSA) and
column 𝑖 is a . Let �̅�𝑖𝑘 denote the mean vector of 𝑋𝑖𝑟
𝑘 across all the rows (i.e.,
proteins). Let 𝐿 denote the sequence length of this family and Nk the number of
sequences. Assuming this MSA has a Gaussian distribution 𝑁(𝜇𝑘, 𝛴𝑘) where 𝜇𝑘
is the mean vector with 21𝐿 elements and 𝛴𝑘 the covariance matrix of size
21𝐿 × 21𝐿. The covariance matrix consists of 𝐿2 sub-matrices, each having size
21 × 21 and corresponding to two columns in the MSA. Let 𝛴𝑖𝑗𝑘 denote the sub-
matrix for columns 𝑖 and 𝑗 . For any two amino acids (or gap) 𝑎 and 𝑏 , their
corresponding entry 𝛴𝑖𝑗𝑘 (𝑎, 𝑏) can be calculated as follows.
𝛴𝑖𝑗𝑘 (𝑎, 𝑏) =
1
𝑁𝑘∑ (𝑋𝑖𝑟
𝑘 (𝑎) − �̅�𝑖𝑘(𝑎))(𝑋𝑗𝑟
𝑘 (𝑏) − �̅�𝑗𝑘(𝑏))
𝑁𝑘𝑟=1 (29)
The 𝛴𝑘 calculated by Eq. (29) actually is an empirical covariance matrix, which
can be treated as an estimation of the true covariance matrix. Let 𝛺𝑘 = (𝛴𝑘)−1
denote the inverse covariance matrix (also called precision matrix), which
indicates the residue or column interaction (or co-evolution) pattern in this
protein family. In particular, the zero pattern in 𝛺𝑘 represents the conditional
independence of the MSA columns. Similar to 𝛴𝑖𝑗𝑘 , the precision sub-matrix 𝛺𝑖𝑗
𝑘
indicates the interaction strength (or inter-dependency) between two columns 𝑖
and 𝑗, which are totally independent (given all the other columns) if only if 𝛺𝑖𝑗𝑘 is
zero.
Due to matrix singularity, we cannot directly calculate 𝛺𝑘 as the inverse of the
empirical covariance matrix. Instead, we may estimate 𝛺𝑘 by maximum-
likelihood with a regularization factor λ1 as follows.
𝑚𝑎𝑥𝛺𝑘
𝑙𝑜𝑔𝑃(𝑋𝑘|𝛺𝑘) − 𝜆1‖𝛺𝑘‖1
Where ‖𝛺𝑘‖1is the 𝐿1 norm of 𝛺𝑘, which is used to make 𝛺𝑘 sparse. Since 𝑃 is
Gaussian, the above optimization problem is equivalent to the following.
𝑚𝑎𝑥𝛺𝑘
(𝑙𝑜𝑔|𝛺𝑘| − 𝑡𝑟(𝛺𝑘�̂�𝑘)) − 𝜆1‖𝛺𝑘‖1
Where �̂�𝑘 is the empirical covariance matrix calculated from the MSA. The
PSICOV method for contact prediction is based upon the above formulation.

67
Figure 22. Illustration of column pair and precision sub-matrix grouping.
Columns 5 and 14 in the 1st family are aligned to columns 5 and 11 in the 2nd
family, respectively, so column pair (5,14) in the 1st family and the pair (5,11) in
the 2nd family are assigned to the same group. Accordingly, the two precision
sub-matrices 𝛺5,141 and 𝛺5,11
2 belong to the same group.
Probabilistic model of multiple related protein families by Group Graphical
Lasso (GGL)
The previous section introduces how to model a single protein family using a
Gaussian graphical model (GGM). In this section I present our probabilistic
model for a set of K related protein families using a set of correlated GGMs. Here
we still assume that each protein family has a Gaussian distribution with a
precision matrix 𝛺𝑘 (𝑘 = 1, 2, … , 𝐾 ). Let Ω denote the set {𝛺1, 𝛺2, … , 𝛺𝐾} and
𝑋 = {𝑋1, 𝑋2, … , 𝑋𝐾} denote the set of MSAs. If we assume that the K families are
independent of each other, we can estimate their precision matrices by
maximizing their joint log-likelihood as follows.
𝑚𝑎𝑥 𝛺
𝑙𝑜𝑔𝑃(𝑋|𝛺) = 𝑙𝑜𝑔∏ 𝑃(𝑋𝑘|𝛺𝑘) −𝐾
𝑘=1𝜆1∑ ‖𝛺𝑘‖1
𝐾
𝑘=1
= ∑ (𝑙𝑜𝑔|𝛺𝑘| − 𝑡𝑟(𝛺𝑘�̂�𝑘))𝐾𝑘=1 − 𝜆1∑ ‖𝛺𝑘‖1
𝐾𝑘=1 (30)
To model the correlation of these families, we assume that the precision matrices
are correlated. Now we will show how to model the correlation of the precision
matrices through the alignment of these protein families.
We build a multiple sequence alignment (MSA) of these K protein families using
a sequence alignment method. Each column in this MSA may consist of columns
from several families. If column pair (𝑗1,𝑗3) in family 𝑘1 is aligned to column pair
(𝑗2, 𝑗4), the interaction strength between two columns 𝑗1 and 𝑗3 in family 𝑘1 shall
be similar to that between columns 𝑗2 and 𝑗4 in family 𝑘2. That is, if there is one
contact between two columns 𝑗1 and 𝑗3, then it is very likely there is also a contact

68
between two columns 𝑗2 and 𝑗4. Accordingly, the precision sub-matrix 𝛺𝑗1,𝑗3𝑘1 for
the two columns 𝑗1 and 𝑗3 in the family 𝑘1 shall be related to the sub-matrix for
the two columns 𝑗2 and 𝑗4 in the family 𝑘2 (i.e., 𝛺𝑗2,𝑗4𝑘2 ). The correlation strength
between 𝛺𝑗1,𝑗3𝑘1 and 𝛺𝑗2,𝑗4
𝑘2 depends on the conservation level of these two column
pairs. That is, if these two column pairs are highly conserved, 𝛺𝑗1,𝑗3𝑘1 and 𝛺𝑗2,𝑗4
𝑘2
shall also be highly correlated. Otherwise, they may be only weakly related.
Based upon this observation, we divide all the column pairs into groups so that
any two aligned column pairs belong to the same group, as shown in Figure 22.
Therefore, if a target family has L columns aligned to at least one auxiliary
family, then there are in total L(L − 1)/2 groups.
Let G denote the number of groups and K the number of involved families. We
estimate the K precision matrices by taking into account their correlation using
group graphical lasso (GGL) as follows.
𝑚𝑎𝑥∑ (𝑙𝑜𝑔|𝛺𝑘| − 𝑡𝑟(𝛺𝑘�̂�𝑘))𝐾𝑘=1 − 𝜆1∑ ‖𝛺𝑘‖1
𝐾𝑘=1 − ∑ 𝜆𝑔||𝛺𝑔||2
𝐺𝑔=1 (31)
Where g represents one group and ||𝛺𝑔||2 = √∑ ‖𝛺𝑖,𝑗𝑘 ‖
𝐹
2(𝑖,𝑗,𝑘)∈𝑔 where ‖𝛺𝑖,𝑗
𝑘 ‖𝐹
2 is the
square of the entry-wise 𝐿2 norm of the precision sub-matrix 𝛺𝑖,𝑗𝑘 . By using this
penalty item, we ensure that the column pairs in the same group have similar
interaction strength. That is, if one column pair in a particular group has a
relatively strong interaction (i.e., ‖𝛺𝑖,𝑗𝑘 ‖
𝐹
2 is large), the other column pairs in this
group shall also have a larger interaction strength. In the opposite, if one column
pair in a particular group has a relatively weak interaction (i.e., ‖𝛺𝑖,𝑗𝑘 ‖
𝐹
2 is small),
the other column pairs in this group shall also have a smaller interaction
strength.
The parameter 𝜆𝑔 is used to enforce residue co-evolution consistency in the same
group. It is proportional to the conservation level in group 𝑔. We measure the
conservation level using both the square root of the number of aligned families in
a group and also the alignment probabilities. In particular, 𝜆𝑔 is defined as
follows.
𝜆𝑔 = 𝛼√𝑁 − 1 √∏ 𝑃𝑛𝑁−1𝑛=1
𝑁−1
Where 𝛼 is a constant (=0.001), N is the number of column pairs in group 𝑔 and 𝑃𝑛
can be interpreted as the average alignment probability between the target family
and the auxiliary family n at the two aligned columns belonging to group g.
Meanwhile, 𝑃𝑛 is calculated as 𝑃𝑛 = 𝑃𝑖𝑃𝑗 where 𝑃𝑖 and 𝑃𝑗 are the marginal
alignment probabilities at the two aligned columns. That is, when the two
aligned column pairs are conserved, both 𝑃𝑖 and 𝑃𝑗 are large, so is 𝑃𝑛 .

69
Consequently, 𝜆𝑔 is large and thus the interaction strength consistency among
the column pairs in group g is strongly enforced. In the opposite, if the marginal
alignment probability is relatively small, 𝜆𝑔 is small. In this case, we shall not
strongly enforce the interaction strength consistency among column pairs in this
group. By using the conservation level (or alignment quality) to control the
correlation of interaction strength, our method is robust to bad alignments and
thus, can also deal with protein families similar at different levels.
Note that our formulation (31) differs from the PSICOV formulation only in the
last term, which is used to enforce co-evolution pattern consistency among
multiple families. Without this term, our formulation is exactly the same as
PSICOV when the same 𝜆1 is used. We use an ADMM algorithm to solve
formulation (31) as the following.
Estimating precision matrices by Alternating Directions Method of Multipliers
(ADMM)
Computationally, Eqs. (31) and (32) can be solved using almost the same ADMM
procedure, so here we explain how to solve Eq. (31) using ADMM (see
https://web.stanford.edu/~boyd/papers/pdf/admm_slides.pdf). To estimate the
precision matrix for the target protein family, we shall solve the following
optimization problem.
(P1) 𝑚𝑎𝑥𝛺𝑓(𝛺) − 𝜆1∑ ‖𝛺𝑘‖1𝐾𝑘=1 − 𝜆𝑔 ∑ ‖𝛺𝑔‖2
𝐺𝑔=1 (33)
𝑓(𝛺) = ∑ (log|Ωk| − tr(ΩkΣ̂k))Kk=1
Where 𝛺 denote the set {𝛺1, 𝛺2, … , 𝛺𝑘}. To apply ADMM, we rewrite P1 as a
constrained optimization problem by making a copy of 𝛺 to 𝑍 , but without
changing the optimal solution.
(P2) 𝑚𝑎𝑥𝛺,𝑍𝑓(𝛺) − 𝑃(𝑍) (34)
𝑃(𝑍) = 𝜆1∑ ‖𝑍𝑘‖1 − 𝜆𝑔 ∑ ‖𝑍𝑔‖2𝐺𝑔=1
𝐾𝑘=1
s.t ∀𝑘,Ωk = 𝑍k
Where 𝑍 denote the set {𝑍1, 𝑍2, … , 𝑍𝑘}. Eq. (34) can be augmented by adding one
term to penalize the difference between Ωk and 𝑍𝑘 as follows.
(P3) 𝑚𝑎𝑥𝛺,𝑍𝑓(𝛺) − 𝑃(𝑍) − ∑𝜌
2
Kk=1 ‖Ωk − 𝑍k‖
𝐹
2 (35)
s.t ∀𝑘,Ωk = 𝑍k

70
P3 is equivalent to P2 and P1, but converges faster due to the added penalty
term. Here 𝜌 is a hyper-parameter controlling the convergence rate. Some
heuristics methods (Rush, et al., 2010; Sontag, et al., 2011) were proposed for
choosing 𝜌 . In our implementation, we set 𝜌 to 0.1. On most test cases, our
algorithm can converge within 40 iterations. Using a Lagrange multiplier 𝑈k for
each constraint Ωk = 𝑍k, we obtain the following Lagrangian dual problem.
(P4) 𝑚𝑖𝑛𝑈𝑚𝑎𝑥𝛺,𝑍𝑓(𝛺) − 𝑃(𝑍) − ∑ (𝜌𝑈k)𝑇(Ωk − 𝑍k) +
𝜌
2
Kk=1 ‖Ωk − 𝑍k‖
𝐹
2 (36)
It is easy to prove that P4 is an upper bound of P3. Instead of directly solving P3,
we solve P4 iteratively. At each iteration, we fix 𝑈 and solve the following sub-
problem.
(P5) 𝑚𝑎𝑥𝛺,𝑍𝑓(𝛺) − 𝑃(𝑍) −𝜌
2‖Ωk − 𝑍k +𝑈k‖
𝐹
2 (37)
The sub-gradient of 𝑈 is −𝜌(𝛺 − 𝑍), so we may update 𝑈 by 𝑈 + 𝜌(𝛺 − 𝑍) and
repeat solving P5 until convergence, i.e., the difference between 𝛺 and 𝑍 is small.
To solve P5, we decompose it into the below two sub-problems and then solve
them alternatively.
(SP1) ∀𝑘, (Ωk)∗ = 𝑎𝑟𝑔𝑚𝑎𝑥𝛺{𝑓(𝛺) −𝜌
2‖Ωk − 𝑍k + 𝑈k‖
𝐹
2} (38)
(SP2) 𝑍∗ = 𝑎𝑟𝑔𝑚𝑖𝑛𝛺{𝜌
2‖Ωk − 𝑍k + 𝑈k‖
𝐹
2} (39)
Meanwhile, SP1 optimizes the objective function (37) with respect to 𝛺 while
fixing 𝑍 and 𝑈. Since in SP1 no two ΩK are coupled together, we can split it into 𝐾
independent optimization sub-problems. SP2 optimizes the objective function
with respect to 𝑍 while fixing 𝛺. Next we will show how to solve these two sub-
problems efficiently.
Solving SP1. SP1 is a concave and smooth function, so we can solve it by setting
its derivate to zero as follows.
((𝛺𝑘)−1 − �̂�𝑘) − 𝜌(𝛺𝑘 − 𝑍𝑘 + 𝑈𝑘) = 0 (40)
Let Mk = Σ̂k-ρZk + ρUk. Then we have Mk = Ωk-1-ρΩk. That is, 𝑀𝑘 has the same
eigenvalues and eigenvectors as (Ωk)-1-ρΩk. Since 𝛺𝑘 and (Ωk)−1
share the same
eigenvectors, 𝑀𝑘 should have the same eigenvectors as (Ωk)-1-ρΩk . Let 𝛿𝑖 and
𝑚𝑖be the ith eigenvalues of matrix 𝛺𝑘 and 𝑀𝑘, respectively, and let 𝑥𝑖 (≠0) be the
corresponding eigenvector. Then we have 𝑀𝑘𝑥𝑖 = (�̂�𝑘 − 𝜌𝑍𝑘 + 𝜌𝑈𝑘)𝑥𝑖 . That is,
𝑚𝑖𝑥𝑖 = (𝛿𝑖−1 − ρ𝛿𝑖)𝑥𝑖 . So we have mi = δi
-1-ρδi, from which we can solve 𝛿𝑖 as
follows.

71
𝛿𝑖 =−𝑚𝑖+√𝑚𝑖
2+4𝜌
2𝜌 (41)
Therefore, we can first do SVD (singular value decomposition) on Mk, and then
reconstruct 𝛺𝑘 from 𝛿𝑖 and the eigenvectors of 𝑀𝑘. SVD is time-consuming. Since
𝑀𝑘 is symmetric and sparse, we can permute its rows and columns to obtain a
diagonal block matrix, which can be done within running time linear in the
number of non-zero elements in 𝑀𝑘 . Then we divide 𝑀𝑘 it into small sub-
matrices and calculate their eigenvalues and eigenvectors separately.
Solving SP2. SP2 is a non-differentiable convex function and we can solve it by
setting its sub-gradients to zero. That is, for each k, we have the following
equation.
𝜌(𝑍𝑖,𝑗𝑘 − 𝐴𝑖,𝑗
𝑘 ) + 𝜆1𝑍𝑖,𝑗𝑘
𝛽𝑔+ 𝜆𝑔𝑡𝑖,𝑗
𝑘 = 0 (42)
Where 𝐴𝑘 = 𝛺𝑘 + 𝑈𝑘 , 𝑡𝑖,𝑗𝑘 is the derivative of |𝑍𝑖,𝑗
𝑘 | and 𝛽𝑔 = ‖𝑍𝑖,𝑗𝑘 ‖
2. Meanwhile,
𝑡𝑖,𝑗𝑘 is equal to any value between -1 and 1 when 𝑍𝑖,𝑗
𝑘 is 0 and otherwise, to
𝑠𝑖𝑔𝑛(𝑍𝑖,𝑗𝑘 ). To solve a particular 𝑍𝑖,𝑗
𝑘 based on Eq. (42), we need to know the value
of 𝛽𝑔, which depends on all the 𝑍𝑖,𝑗𝑘 in group 𝑔. That is, we cannot solve these 𝐾
optimization problems separately.
Let 𝑆(𝑥, 𝑐) = max(𝑥 − 𝑐 × 𝑠𝑖𝑔𝑛(𝑥), 0). Eq. (42) can be written as follows.
(1 +𝜆𝑔
𝜌𝛽𝑔)𝑍𝑖,𝑗
𝑘 = 𝑆(𝐴𝑖,𝑗𝑘 ,
𝜆1
𝜌) (43)
Taking the square of both sides in Eq. (43) and summing up over all (𝑖, 𝑗, 𝑘) ∈ 𝑔,
we have the following equation.
∑ (1 +𝜆𝑔
ρ𝛽𝑔)2
(𝑖,𝑗,𝑘)∈𝑔 (𝑍𝑖,𝑗𝑘 )2 = ∑ 𝑆(𝐴𝑖,𝑗
𝑘 ,𝜆1
ρ)2(𝑖,𝑗,𝑘)∈𝑔 (44)
By definition, ∑ (Zi,jk )2 = βg
2(i,j,k)∈g , since (1 +
𝜆𝑔
𝜌𝛽𝑔)2
is independent of (𝑖, 𝑗, 𝑘), the
left hand side of Eq. (44) is equal to (𝛽𝑔 +𝜆𝑔
𝜌)2. Therefore, we can represent 𝛽𝑔 as
follows.
𝛽𝑔 = √∑ 𝑆(𝐴𝑖,𝑗𝑘 ,
𝜆1
𝜌)2(𝑖,𝑗,𝑘)∈𝑔 −
𝜆𝑔
𝜌 (45)
Plugging Eq. (45) back into Eq. (43), we obtain the value of 𝑍𝑖,𝑗𝑘 as follows.
Zi,jk = S(Ai,j
k ,λ1
ρ)(1-
λg
ρ√∑ S(Ai,jk ,
λ1ρ)2(i,j,k)∈g
) (46)

72
Including predicted probability by supervised learning as prior information
Compared to single-family EC analysis, our joint EC analysis uses residue co-
evolution information from auxiliary families to improve contact prediction. In
addition to co-evolution information, sequence profile and some non-
evolutionary information are also useful for contact prediction. To make use of
them, we first use a supervised machine learning method Random Forests to
predict the probability of two residues forming a contact and then integrate this
predicted probability as prior into our GGL framework. In particular, our
Random Forests model predicts the probability of two residues forming a contact
using the following information.
PSI-BLAST sequence profile. To predict the contact probability of two residues,
we use their position-specific mutation scores and those of the sequentially
adjacent residues.
Mutual information (MI) and its power series. When residue 𝐴 has strong
interaction with 𝐵 and 𝐵 has strong interaction with residue 𝐶, it is likely that
residue 𝐴 also has interaction with 𝐶. We use the MI𝑘 power series to account for
this kind of chaining effect. In particular, we use MI𝑘 where 𝑘 ranges from 2 to 11
where MI is the mutual information matrix. When there are many sequence
homologs, the MI power series are very helpful to medium- and long-range
contact prediction. EPAD: a context-specific distance-dependent statistical
potential (Zhao and Xu, 2012), derived from protein evolutionary information.
The 𝐶𝛼 and 𝐶𝛽 atomic interaction potential at all the distance bins is used. The
atomic distance is discretized into bins by 1Å and all the distance>15Å is
grouped into a single bin.
Amino acid physic-chemical properties.
Some features are calculated on the residues in a local window of size 5 centered
at the residues under consideration. In total there are ~300 features for each
residue pair.
We trained and selected the model parameters of our Random Forests model by
5-fold cross validation. In total we used about 850 training proteins, all of which
have <25% sequence identity with our test proteins. See paper (Wang and Xu,
2013) for the description of the training proteins.
Finally, our GGL formulation with predicted contact probability as prior is as
follows.

73
𝑚𝑎𝑥 ∑ (𝑙𝑜𝑔|𝛺𝑘| − 𝑡𝑟(𝛺𝑘�̂�𝑘))𝐾𝑘=1 − 𝜆1∑ ‖𝛺𝑘‖1
𝐾𝑘=1 −∑ 𝜆𝑔||𝛺𝑔||2
𝐺𝑔=1 − 𝜆2 ∑ ∑
‖𝛺𝑖𝑗𝑘 ‖
1
𝑚𝑎𝑥(𝑃𝑖𝑗𝑘 ,0.3)𝑖𝑗
𝐾𝑘=1 (47)
Where 𝑃𝑖𝑗𝑘 is the predicted contact probability by Random Forests and 𝑚𝑎𝑥(𝑃𝑖𝑗
𝑘 ,
0.3) is used to reduce the impact of very small predicted probability. Meanwhile,
𝑒𝑥𝑝(−𝜆2∑ ∑‖𝛺𝑖𝑗
𝑘 ‖1
𝑚𝑎𝑥(𝑃𝑖𝑗𝑘 ,0.3)𝑖𝑗
𝐾𝑘=1 ) can be interpreted as the prior probability of 𝛺 ,
which is used to promote the similarity between the precision matrix and the
predicted contact probability. Formulation (4) differs from formulation (3) only
in the last term. From computational perspective, 𝜆2∑ ∑‖𝛺𝑖𝑗
𝑘 ‖1
𝑚𝑎𝑥(𝑃𝑖𝑗𝑘 ,0.3)𝑖𝑗
𝐾𝑘=1 is similar
to 𝜆1∑ ‖𝛺𝑘‖1𝐾𝑘=1 , so we can use almost the same computational method to
optimize both formulations.
Alignment of multiple protein families
To build the alignment of multiple protein families, we employ a probabilistic
consistency method in (Do, et al., 2006). To employ this consistency method, we
need to calculate the probabilistic alignment matrix between any two protein
families. Each matrix entry is the marginal alignment probability (MAP) of two
columns, each in one family. In addition to this probability method, we also
employed MCoffee (Wallace, et al., 2006) to generate alignment of multiple
families.
Majority voting method for contact prediction
Majority voting is a simple way of utilizing auxiliary protein families for contact
prediction. We first build an alignment of multiple protein families using the
methods mentioned above. Then we use PSICOV to predict contact map for each
of the related protein families. To determine if there is a contact between any two
columns 𝑖 and 𝑗 in the target protein family, we use a majority voting based upon
the predicted contacts for all the column pairs aligned to the pair (𝑖, 𝑗) . In
addition, we also assign a weight to each family proportional to the number of
non-redundant sequence homologs in it. The more NR sequence homologs, the
more weight this family carries since usually such a family has higher contact
prediction accuracy. In this experiment, each protein family is modeled using a
different probability distribution since PSICOV is applied to each of the related
families separately.
Pre-processing and Post-processing

74
We employ the same pre- and post-processing procedures as PSICOV to ensure
our comparison with PSICOV is fair. Briefly, to reduce the impact of redundant
sequences, we apply the same sequence weighting method as PSICOV. In
particular, duplicate sequences are removed and columns containing more than
90% of gaps are also deleted. The sequence is weighted using a threshold of 62%
sequence identity. We add a small constant (=0.1) to the diagonal of the empirical
covariance matrix to ensure it is not singular. Similar to PSICOV and plmDCA,
average-product correction (APC) (Jones, et al., 2012) is applied to post-process
predicted contacts.
6.3 Results
We use two datasets to evaluate the performance of our method. One is a subset
of the benchmark used in the PSICOV paper, consisting of 98 Pfam families, each
of which has at least one auxiliary family. As shown in Eq. (47), when no
auxiliary families are available, our method becomes normal graphical lasso with
supervised prediction as prior. By considering only the Pfam families with
auxiliary families, we can evaluate the impact of auxiliary families. The other
dataset consists of the 123 CASP10 targets, some of which do not have auxiliary
families.
PSICOV dataset
It is selected from the 150 Pfam (Bateman, et al., 2004; Finn, et al., 2014) families
used by PSICOV as benchmark, all of which have solved structures in PDB. To
make a fair comparison, we use the same solved structures as PSICOV to
calculate native contacts. Only 𝐶𝛼 contact prediction results are presented.
Similar performance trend is observed for𝐶𝛽 contacts. We denote these Pfam
families, for which we would like to predict contacts, as the target families. For
each target family, we find its related families in Pfam, also called auxiliary
families, using HHpred with E-value=10-6 as cutoff. As a result, 98 families have
at least one auxiliary family and are used as our test data. We can also relax the
E-value cutoff to obtain more distantly-related auxiliary families, but this does
not lead to significant accuracy improvement. Among the 98 target families, the
average TM-score between the representative solved structures of a target family
and of its auxiliary families is ~0.7. That is, the target and auxiliary families are
not very close, although they may have similar folds. Even using E-value≤10-17
as cutoff, some target and auxiliary families are only similar at the SCOP fold
level.

75
To ensure that the Pfam database does not miss important sequence homologs,
we generate an MSA for each target family by PSI-BLAST (5 iterations and E-
value=0.001) and then apply PSICOV to this MSA. Such a method is denoted as
PSICOV_b. Since HHblits sometimes may detect sequence homologs of higher
quality than PSI-BLAST, we also run HHblits to build an MSA for a target
sequence and then examine if this MSA can lead to better prediction or not.
Methods to be compared
We compare our method with a few popular EC methods such as PSICOV,
Evfold, plmDCA and GREMLIN and a few supervised learning methods such
that NNcon and CMAPpro. We use their default parameter settings. Since both
plmDCA and GREMLIN use the pseudo-likelihood methods, we run Evfold with
the mean field solution instead of the pseudo-likelihood solution to diversify the
set of methods to be compared.
There are two alternative strategies to use information in auxiliary families. One
is that we can merge a target and its auxiliary families into a single MSA and
then apply single-family EC analysis. To test this strategy, we align and merge a
target and its auxiliary families into a single MSA using a probabilistic
consistency method and MCoffee, respectively, and denote them as Merge_p and
Merge_m. The other strategy, denoted as Voting, is that we apply the single-
family EC method PSICOV to each of the target and auxiliary families and then
apply a majority voting method to predict the contacts in the target family.
We evaluate the top L/10, L/5 and L/2 predicted contacts where L is the sequence
length of a protein (family) under prediction. The contact prediction accuracy is
defined as the percentage of native contacts in the top predicted contacts. When
more predicted contacts are evaluated, the difference among methods decreases
since it is more likely to pick a native contact by chance. Contacts are short-,
medium- and long-range when the sequence distance between the two residues
in a contact falls into three intervals [6,12), [12, 24), and ≥24, respectively.
Generally speaking, medium- and long-range contacts are more important, but
more challenging to predict.
Overall performance on the PSICOV test set
As shown in Table 22, tested on all the 98 Pfam families with auxiliary families,
our method CoinDCA outperforms the others when the top L/10, L/5 and L/2
predicted contacts are evaluated, no matter whether the contacts are short-,
medium- and long-range. When neither auxiliary families nor supervised
learning is used, CoinDCA is exactly the same as PSICOV. Therefore, the results

76
in Table 1 indicate that combining joint EC analysis and supervised learning
indeed can improve contact prediction accuracy over single-family EC analysis.
We also observe the following performance trends.
1) In terms of contact prediction, the MSAs generated by PSIBLAST or HHblits
are not better than those in Pfam.
2) A simple majority voting scheme performs worse than the single-family EC
methods. This may be due to a couple of reasons. When a single family is
considered, PSICOV may wrongly predict contacts in each family in very
different ways, so consensus of single-family results can only identify those
highly-conserved contacts, but not those specific to one or few families. In
addition, majority voting may suffer from alignment errors.
3) It does not work well by merging the target and auxiliary families together
into a single MSA and then applying single-family EC analysis. There are two
possible reasons. One is that the resultant MSA may contain alignment errors,
especially when the auxiliary families are not very close to the target family. The
other is that we cannot use a single Gaussian distribution to model the related
but different families due to sequence divergence (at some positions). Since
Merge_p performs better than Merge_m, we will consider only Merge_p in the
following sections.
PSICOV models the MSA of a protein family using a multivariate Gaussian
distribution. This Gaussian assumption holds only when the family contains a
large number of sequence homologs. plmDCA and GREMLIN do not use the
Gaussian assumption and are reported to outperform PSICOV on some Pfam
families. Our method CoinDCA still uses the Gaussian assumption. This test
result indicates that when EC information in multiple related families is used,
even with Gaussian assumption, we can still outperform the single-family EC
methods without using Gaussian assumption.
Table 22. Contact prediction accuracy on all the 98 test Pfam families. plmDCA
and GREMLIN use the MSAs in the Pfam database while plmDCA_h and
GREMLIN_h use the MSAs generated by HHblits.
Short-range Medium-range Long-range L/10 L/5 L/2 L/10 L/5 L/2 L/10 L/5 L/2
CoinDCA 0.528 0.446 0.316 0.496 0.435 0.312 0.561 0.502 0.391
PSICOV 0.369 0.299 0.205 0.375 0.312 0.213 0.446 0.400 0.311
PISCOV_h 0.382 0.306 0.204 0.418 0.334 0.218 0.466 0.421 0.310
PSICOV_b 0.356 0.286 0.199 0.388 0.306 0.199 0.462 0.400 0.294
Merge_p 0.316 0.265 0.183 0.303 0.246 0.178 0.370 0.328 0.253
Merge_m 0.298 0.237 0.172 0.276 0.223 0.169 0.355 0.309 0.232
Voting 0.343 0.232 0.184 0.405 0.280 0.168 0.337 0.353 0.275
plmDCA 0.422 0.327 0.203 0.433 0.354 0.233 0.484 0.443 0.343

77
plmDCA_h 0.387 0.300 0.186 0.433 0.339 0.211 0.480 0.413 0.292
plmDCA_b 0.381 0.301 0.184 0.431 0.338 0.210 0.478 0.421 0.289
GREMLIN 0.410 0.312 0.220 0.401 0.332 0.225 0.447 0.423 0.329
GREMLIN_h 0.387 0.291 0.188 0.391 0.316 0.204 0.428 0.400 0.301
GREMLIN_b 0.379 0.289 0.187 0.390 0.314 0.203 0.426 0.398 0.303
Evfold 0.340 0.274 0.191 0.364 0.298 0.209 0.400 0.361 0.281
Evfold_h 0.326 0.250 0.171 0.345 0.279 0.189 0.381 0.333 0.262
Evfold_b 0.324 0.252 0.169 0.344 0.275 0.190 0.382 0.332 0.261
Dependency on the number of sequence homologs
Our method outperforms the others regardless of the size of a protein family.
Similar to (Jones, et al., 2012), we calculate the number of non-redundant
sequence homologs in a family (or multiple sequence alignment) by 𝑀𝑒𝑓𝑓 =
∑ 1/∑ 𝑠𝑖,𝑗𝑗𝑖 where 𝑖 and 𝑗 are sequence indexes and si,j is a binary variable
indicating if two sequences are similar or not. Itis equal to 1 if the normalized
hamming distance between two sequences is less than 0.3; otherwise, 0. The
reason why we use 𝑀𝑒𝑓𝑓 instead of the number of sequences to quantify the
information content in an MSA is that there may exist many highly similar
homologs in the MSA. Highly similar homologs do not provide more
information for co-evolution detection than a single one, so we can only count
the number of non-redundant sequence homologs. We divide the 98 test families
into 5 groups by lnMeff: [4,5), [5,6), [6,7), [7,8), [8,10), and calculate the average
L/10 prediction accuracy in each group. Figure 23 shows that our method
performs significantly better than the others regardless of lnMeff. In particular,
the advantage of our method over the others is even larger when 𝑙𝑛𝑀𝑒𝑓𝑓 is small.
Figure 23. (A) Medium-range and (B) Long-range L/10 prediction accuracy with
respect to 𝑙𝑛𝑀𝑒𝑓𝑓.
Performance and contact conservation level

78
For a native contact in the target family, we measure its conservation level by the
number of auxiliary families with a contact alignable to this target contact. The 98
test families have conservation levels ranging from 0 to 8, corresponding to non-
conserved and highly-conserved, respectively. In particular, a native contact with
a conservation level of 0 is target family-specific since it has no support from any
auxiliary families. Correct prediction of family-specific contacts is important
since they may be very useful to the refinement of a template-based protein
model.
Figure 24 (A) and (B) shows the ratio of medium- and long-range native contacts
ranked among top L/10 predictions with respect to contact conservation level.
Our method CoinDCA ranks many more native long-range contacts among top
L/10 than the single-family EC methods PSICOV, plmDCA and GREMLIN
regardless of conservation level. CoinDCA has similar performance as the family
merging method Merge_p for long-range contacts with conservation level ≥5, but
significantly outperforms Merge_p for family-specific contacts. This may be
because when the target and auxiliary families are merged together, the signal
for highly-conserved contacts is reinforced but that for family-specific contacts is
diluted. By contrast, our joint EC analysis method can reinforce the signal for
highly-conserved contacts without losing family-specific information.
(A) (B)
Figure 24. The ratio (Y-axis) of native contacts ranked by a prediction method
among top L/10 with respect to contact conservation level (X-axis) for (A)
medium-range and (B) long-range.
Performance on the CASP10 targets
In this test we run NNcon, PSICOV, plmDCA, GREMLIN and EVfold locally
with default parameters, and CMAPpro through its web server. Again, we run
HHpred to search the Pfam database for auxiliary families for each test target.

79
Meanwhile, 75 of 123 targets have at least one auxiliary family. For those targets
without any auxiliary families, our method actually becomes the combination of
single-family EC analysis and supervised learning. As shown in Table 23, on the
whole CASP10 set, our method CoinDCA again outperforms the others in terms
of the accuracy of the top L/10, L/5 and L/2 predicted contacts.
Table 23. Contact prediction accuracy on all the 123 CASP10 targets. See
supplementary for statistical significance (i.e., P-value).
Short-range Medium-range Long-range
L/10 L/5 L/2 L/10 L/5 L/2 L/10 L/5 L/2 CoinDCA 0.517 0.435 0.311 0.500 0.440 0.340 0.412 0.351 0.279 PSICOV 0.234 0.191 0.140 0.310 0.259 0.192 0.276 0.225 0.168 plmDCA 0.264 0.218 0.152 0.344 0.289 0.214 0.326 0.280 0.213 NNcon 0.499 0.399 0.275 0.393 0.334 0.226 0.239 0.188 0.001
GREMLIN 0.256 0.212 0.161 0.343 0.280 0.229 0.320 0.278 0.159 CMAPpro 0.437 0.368 0.253 0.414 0.363 0.276 0.336 0.297 0.227
EVfold 0.193 0.165 0.130 0.294 0.249 0.188 0.257 0.225 0.171
We also divide the 123 CASP10 targets into five groups according to lnMeff: (0,2),
(2,4), (4,6), (6,8), (8,10), which contain 19, 17, 25, 36 and 26 targets, respectively.
Meanwhile,𝑀𝑒𝑓𝑓 measures the number of non-redundant sequence homologs
available for a target protein under prediction. We then calculate the average
medium- and long-range contact prediction accuracy in each group. Figure 23
clearly shows that the prediction accuracy increases with respect to 𝑙𝑛𝑀𝑒𝑓𝑓 and
that our method outperforms the others on all the 5 intervals of 𝑙𝑛𝑀𝑒𝑓𝑓 . In
particular, our method works much better than the single-family EC analysis
methods when 𝑙𝑛𝑀𝑒𝑓𝑓 <8.
Figure 23. The relationship between prediction accuracy and 𝑙𝑛𝑀𝑒𝑓𝑓. X-axis is
the 𝑙𝑛𝑀𝑒𝑓𝑓 value and Y-axis is the mean accuracy of top L/10 predicted contacts
in the corresponding CASP10 target group. Only medium- and long-range
contacts are considered.

80
6.4 Discussion
In this chapter I has presented a GGL method to predict contacts by integrating
joint EC analysis and supervised machine learning. Evolutionary coupling (EC)
analysis and supervised learning are currently two major methods for contact
prediction, but they use different information sources. Our joint EC analysis
predicts contacts in a target family by analyzing residue co-evolution
information in a set of related protein families which may share similar contact
maps. In order to effectively integrate information across multiple families, we
use GGL to estimate the joint probability distribution of multiple related families
by a set of correlated Gaussian models. Experiments show that the combination
of joint EC analysis with supervised machine learning can significantly improve
contact prediction, and that our method even outperforms single-family EC
analysis on protein families with a large number of sequence homologs. We have
also shown that contact prediction cannot be improved by a simple method, such
as family merging and majority voting of single-family EC analysis results. These
simple methods may improve prediction for highly-conserved contacts at the
cost of family-specific contacts.
Our method can be further improved. For example, similar to GREMLIN and
plmDCA, we may relax the Gaussian assumption to improve prediction
accuracy. This paper uses an entry-wise 𝐿2 norm to penalize contact map
inconsistency among related protein families. There may be other penalty
functions that can more accurately quantify contact map similarity between two
families as a function of sequence similarity and thus, further improve contact
prediction. It may further improve contact prediction by integrating other
supervised learning methods such as CMAPpro, NNcon and DNcon or even
other EC methods into our GGL framework.
In this work we use Pfam to define a protein family because it is manually-
curated and very accurate. There are also other criteria to define a protein family.
For example, SCOP defines a protein family based upon structure information
and thus, classifies protein domains into much fewer families than Pfam. In our
experiment, the average structure similarity, measured by TM-score, between a
target (Pfam) family and its auxiliary (Pfam) families is only around 0.7. That is,
many auxiliary families are not highly similar to its target families even by the
SCOP definition. Indeed, some auxiliary families are only similar to the target
family at the SCOP fold level. That is, even a remotely-related protein family
may provide information useful for contact prediction.

81
We can further extend our method to predict contacts of all the protein families
simultaneously, instead of one-by-one, by joint EC analysis across the whole
protein family universe. First we can use a graph to model the whole Pfam
database, each vertex representing one Pfam family and an edge indicating that
two families may be related. Then we can use a graph of correlated GGMs to
model the whole Pfam graph, each GGM for one vertex. The GGMs of two
vertices in an edge are correlated together through the alignment of their
respective protein families. By this way, the residue co-evolution information in
one family can be passed onto any family that is connected through a path. As
such, we may predict the contacts of one family by making use of information in
all the path-connected families. By enforcing this global consistency, we should
be able to further improve EC analysis for contact prediction. However, to
simultaneously estimate the parameters of all the GGMs, a large amount of
computational power will be needed.
Chapter 7 Conclusion and Future
Work
The thesis is aimed to solve the template-based protein structure prediction
problem by improving the quality of protein alignment. We have developed a
new alignment method that align two families through alignment of two Markov
Random Fields (MRFs), which model the multiple sequence alignment (MSA) of
a protein family using an undirected general graph in a probabilistic way. The
node alignment potential can handle the complex relationship between various
kinds of features and alignment alignments (Chapter 4, Chapter 5). The edge
alignment potential can integrate both supervised-learning-based and
evolutionary-coupling-based (Chapter 6) interaction strength to quantify the
global similarity between pairs of residues on two proteins to be aligned.
Experiments show that our different alignment methods can generate more
accurate alignments and is also much more sensitive than other state-of-the-art
methods.
Building Alignments suitable for 3D modeling of protein structure.

82
For template-based protein structure prediction, there are correlations between
the alignment accuracy and quality of the model recovered using the alignment.
However, it is not always the case that the more accurate of the alignment
between target and template proteins, the higher quality the recovered model
has. The reason is that the residues on the primary sequence are not equally
important for structure prediction. Aligning some of the most crucial residues
correctly to the template is more important than aligning others correctly. For
example, several shifts of alignment between two beta sheets (helix) from two
proteins might not influence the final model quality very much while missing
aligning one “hinge” residue might lead to completely wrong domain
orientation in the recovered model. From a machine learning perspective, it is
very hard to design a computational model that can achieve zero training error
on the training and validation sets. This could be caused by: 1) The features we
use is not discriminative enough. 2) The computational model is not powerful
enough to capture all the correlations among features and samples. From another
perspective, we usually add some penalty terms (prior probability) to prohibit
zero error to overcome over-fitting. If we know we have to make some mistakes
in the training and testing data sets (suppose they are from the same
distribution), we do not want our model to miss align the most crucial residues
for template-based protein structure prediction. Here we propose a novel
alignment method that will produce alignments suitable for model recovery.
To overcome this problem, we use a newly developed machine learning model
called HCsearch to find the alignment directly maximizing the model quality.
The framework uses a search procedure guided by a learned heuristic 𝐻 to
uncover high quality candidate alignments and then uses a separate learned cost
function 𝐶 to select a final alignment among those candidates.

83
Figure 24. HCsearch based alignment method.
Given a target protein 𝑆 and a template protein 𝑇 and their alignment 𝐴0, start
from 𝐴0 we can generate 𝑀 candidate alignments {𝐴1, 𝐴2, … , 𝐴𝑀} . We can
recovery 𝑀 models using 3D modeling software corresponding to these 𝑀
different alignments. During the training process, since we know the native
structure of 𝑆 we can calculate the model quality for each these 𝑀 models. We
then collect all the pairwise ranking decisions of these 𝑀 model quality. Ties are
broken using a fixed arbitrator. The aggregate set of ranking examples collected
over all the training examples is then given to a learning algorithm to learn the
weights of the heuristic function. In this work we use the margin-scaled variant
of the online Passive-Aggressive algorithm (Doppa, et al., 2013). Let 𝐴𝑏𝑒𝑠𝑡 to be
the alignment with the highest model quality from {𝐴1, 𝐴2, … , 𝐴𝑀}. We then let
𝐴0 = 𝐴𝑏𝑒𝑠𝑡 then repeat the above process for 𝑁 times. We then use the partial
relationship between these 𝑁 best alignments to train another ranking model
using the same online learning algorithm. The first ranking function is called
Heuristic function (H function) and the second ranking is called the Cost
function (C function). The pipeline of the algorithm is shown in Figure 24.

84
Reference
Altschul, S.F., et al. Basic local alignment search tool. Journal of molecular biology 1990;215(3):403-410. Altschul, S.F., et al. Gapped BLAST and PSI-BLAST: a new generation of protein database search programs. Nucleic acids research 1997;25(17):3389-3402. Andreeva, A., et al. SCOP database in 2004: refinements integrate structure and sequence family data. Nucleic acids research 2004;32(suppl 1):D226-D229. Angermüller, C., Biegert, A. and Söding, J. Discriminative modelling of context-specific amino acid substitution probabilities. Bioinformatics 2012;28(24):3240-3247. Bateman, A., et al. The Pfam protein families database. Nucleic acids research 2004;32(suppl 1):D138. Bateman, A., et al. The Pfam protein families database. Nucleic acids research 2004;32(suppl 1):D138-D141. Boyd, S., et al. Distributed optimization and statistical learning via the alternating direction method of multipliers. Foundations and Trends® in Machine Learning 2011;3(1):1-122. Braberg, H., et al. SALIGN: a web server for alignment of multiple protein sequences and structures. Bioinformatics 2012;28(15):2072-2073. Cheng, J. and Baldi, P. Improved residue contact prediction using support vector machines and a large feature set. BMC bioinformatics 2007;8(1):113. Consortium, U. Reorganizing the protein space at the Universal Protein Resource (UniProt). Nucleic acids research 2011:gkr981. de Juan, D., Pazos, F. and Valencia, A. Emerging methods in protein co-evolution. Nature Reviews Genetics 2013;14(4):249-261. Di Lena, P., Nagata, K. and Baldi, P. Deep architectures for protein contact map prediction. Bioinformatics 2012;28(19):2449-2457. Do, C.B., Gross, S.S. and Batzoglou, S. CONTRAlign: discriminative training for protein sequence alignment. In, Research in Computational Molecular Biology. Springer; 2006. p. 160-174. Doppa, J.R., Fern, A. and Tadepalli, P. HC-Search: Learning Heuristics and Cost Functions for Structured Prediction. In, AAAI. 2013. p. 4. Eddy, S.R. {HMMER: Profile hidden Markov models for biological sequence analysis}. 2001. Eickholt, J. and Cheng, J. Predicting protein residue–residue contacts using deep networks and boosting. Bioinformatics 2012;28(23):3066-3072. Ekeberg, M., et al. Improved contact prediction in proteins: using pseudolikelihoods to infer Potts models. Physical Review E 2013;87(1):012707. Eswar, N., et al. Comparative protein structure modeling using Modeller. Current protocols in bioinformatics 2006:5.6. 1-5.6. 30. Finn, R.D., et al. Pfam: the protein families database. Nucleic acids research 2014;42(D1):D222-D230.

85
Fiser, A. and Šali, A. Modeller: generation and refinement of homology-based protein structure models. Methods in enzymology 2003;374:461-491. Forney Jr, G.D. The viterbi algorithm. Proceedings of the IEEE 1973;61(3):268-278. Gonnet, G.H., Cohen, M.A. and Benner, S.A. Exhaustive matching of the entire protein sequence database. Science 1992;256(5062):1443-1445. Heger, A. and Holm, L. Picasso: generating a covering set of protein family profiles. Bioinformatics 2001;17(3):272-279. Henikoff, S. and Henikoff, J.G. Amino acid substitution matrices from protein blocks. Proceedings of the National Academy of Sciences 1992;89(22):10915-10919. Holm, L. and Sander, C. Dali: a network tool for protein structure comparison. Trends in biochemical sciences 1995;20(11):478-480. Hughey, R. and Krogh, A. SAM: Sequence alignment and modeling software system. 1995. Jaroszewski, L., et al. FFAS03: a server for profile–profile sequence alignments. Nucleic acids research 2005;33(suppl 2):W284-W288. Jones, D.T., et al. PSICOV: precise structural contact prediction using sparse inverse covariance estimation on large multiple sequence alignments. Bioinformatics 2012;28(2):184-190. Kabsch, W. and Sander, C. Dictionary of protein secondary structure: pattern recognition of hydrogen-bonded and geometrical features. Biopolymers 1983;22(12):2577-2637. Kamisetty, H., Ovchinnikov, S. and Baker, D. Assessing the utility of coevolution-based residue–residue contact predictions in a sequence-and structure-rich era. Proceedings of the National Academy of Sciences 2013;110(39):15674-15679. Kim, D.E., et al. One contact for every twelve residues allows robust and accurate topology‐level protein structure modeling. Proteins: Structure, Function, and Bioinformatics 2014;82(S2):208-218. Klepeis, J. and Floudas, C. ASTRO-FOLD: a combinatorial and global optimization framework for ab initio prediction of three-dimensional structures of proteins from the amino acid sequence. Biophysical Journal 2003;85(4):2119-2146. Kumar, A. and Cowen, L. Augmented training of hidden Markov models to recognize remote homologs via simulated evolution. Bioinformatics 2009;25(13):1602-1608. Lackner, P., et al. ProSup: a refined tool for protein structure alignment. Protein Engineering 2000;13(11):745-752. Lafferty, J., McCallum, A. and Pereira, F.C. Conditional random fields: Probabilistic models for segmenting and labeling sequence data. 2001. Lathrop, R.H. The protein threading problem with sequence amino acid interaction preferences is NP-complete. Protein engineering 1994;7(9):1059-1068. Ma, J., et al. A conditional neural fields model for protein threading. Bioinformatics 2012;28(12):i59-i66. Ma, J., et al. MRFalign: protein homology detection through alignment of Markov random fields. In, Research in Computational Molecular Biology. Springer; 2014. p. 173-174.

86
Ma, J., et al. Protein Contact Prediction by Integrating Joint Evolutionary Coupling Analysis and Supervised Learning. In, Research in Computational Molecular Biology. Springer; 2015. p. 218-221. Malouf, R. A comparison of algorithms for maximum entropy parameter estimation. In, proceedings of the 6th conference on Natural language learning-Volume 20. Association for Computational Linguistics; 2002. p. 1-7. Marks, D.S., et al. Protein 3D structure computed from evolutionary sequence variation. PloS one 2011;6(12):e28766. McGuffin, L.J., Bryson, K. and Jones, D.T. The PSIPRED protein structure prediction server. Bioinformatics 2000;16(4):404-405. Menke, M., Berger, B. and Cowen, L. Matt: local flexibility aids protein multiple structure alignment. PLoS Comput Biol 2008;4(1):e10. Morgenstern, B., et al. DIALIGN: finding local similarities by multiple sequence alignment. Bioinformatics 1998;14(3):290-294. Needleman, S.B. and Wunsch, C.D. A general method applicable to the search for similarities in the amino acid sequence of two proteins. Journal of molecular biology 1970;48(3):443-453. Pearson, W.R. [5] Rapid and sensitive sequence comparison with FASTP and FASTA. Methods in enzymology 1990;183:63-98. Peng, J., Bo, L. and Xu, J. Conditional neural fields. In, Advances in neural information processing systems. 2009. p. 1419-1427. Peng, J. and Xu, J. Boosting protein threading accuracy. In, Research in computational molecular biology. Springer; 2009. p. 31-45. Remmert, M., et al. HHblits: lightning-fast iterative protein sequence searching by HMM-HMM alignment. Nature methods 2012;9(2):173-175. Rush, A.M., et al. On dual decomposition and linear programming relaxations for natural language processing. In, Proceedings of the 2010 Conference on Empirical Methods in Natural Language Processing. Association for Computational Linguistics; 2010. p. 1-11. Skwark, M.J., Abdel-Rehim, A. and Elofsson, A. PconsC: combination of direct information methods and alignments improves contact prediction. Bioinformatics 2013;29(14):1815-1816. Smith, T.F. and Waterman, M.S. Identification of common molecular subsequences. Journal of molecular biology 1981;147(1):195-197. Söding, J. Protein homology detection by HMM–HMM comparison. Bioinformatics 2005;21(7):951-960. Sontag, D., Globerson, A. and Jaakkola, T. Introduction to dual decomposition for inference. Optimization for Machine Learning 2011;1:219-254. Tan, Y.H., Huang, H. and Kihara, D. Statistical potential‐based amino acid similarity matrices for aligning distantly related protein sequences. Proteins: Structure, Function, and Bioinformatics 2006;64(3):587-600. Tegge, A.N., et al. NNcon: improved protein contact map prediction using 2D-recursive neural networks. Nucleic acids research 2009;37(suppl 2):W515-W518. Tomii, K. and Akiyama, Y. FORTE: a profile–profile comparison tool for protein fold recognition. Bioinformatics 2004;20(4):594-595.

87
Wallace, I.M., et al. M-Coffee: combining multiple sequence alignment methods with T-Coffee. Nucleic acids research 2006;34(6):1692-1699. Wang, G. and Dunbrack, R.L. PISCES: a protein sequence culling server. Bioinformatics 2003;19(12):1589-1591. Wang, S., et al. Protein structure alignment beyond spatial proximity. Scientific reports 2013;3. Wang, Z. and Xu, J. Predicting protein contact map using evolutionary and physical constraints by integer programming. Bioinformatics 2013;29(13):i266-i273. Wang, Z., et al. Protein 8‐class secondary structure prediction using conditional neural fields. Proteomics 2011;11(19):3786-3792. Ward, J.J., et al. The DISOPRED server for the prediction of protein disorder. Bioinformatics 2004;20(13):2138-2139. Wu, S. and Zhang, Y. A comprehensive assessment of sequence-based and template-based methods for protein contact prediction. Bioinformatics 2008;24(7):924-931. Wu, S. and Zhang, Y. MUSTER: improving protein sequence profile–profile alignments by using multiple sources of structure information. Proteins: Structure, Function, and Bioinformatics 2008;72(2):547-556. Xu, J., et al. RAPTOR: optimal protein threading by linear programming. Journal of bioinformatics and computational biology 2003;1(01):95-117. Xu, J. and Zhang, Y. How significant is a protein structure similarity with TM-score= 0.5? Bioinformatics 2010;26(7):889-895. Yang, Y., et al. Improving protein fold recognition and template-based modeling by employing probabilistic-based matching between predicted one-dimensional structural properties of query and corresponding native properties of templates. Bioinformatics 2011;27(15):2076-2082. Yona, G. and Levitt, M. Within the twilight zone: a sensitive profile-profile comparison tool based on information theory. Journal of molecular biology 2002;315(5):1257-1275. Zemla, A., et al. Processing and analysis of CASP3 protein structure predictions. Proteins: Structure, Function, and Bioinformatics 1999;37(S3):22-29. Zhang, Y. and Skolnick, J. TM-align: a protein structure alignment algorithm based on the TM-score. Nucleic acids research 2005;33(7):2302-2309. Zhao, F., Peng, J. and Xu, J. Fragment-free approach to protein folding using conditional neural fields. Bioinformatics 2010;26(12):i310-i317. Zhao, F. and Xu, J. A position-specific distance-dependent statistical potential for protein structure and functional study. Structure 2012;20(6):1118-1126.