PropaGator Oral Report 3 Andrew Wegener IMDL 2012.
8
PropaGator Oral Report 3 Andrew Wegener IMDL 2012
-
Upload
raymond-freeman -
Category
Documents
-
view
218 -
download
0
Transcript of PropaGator Oral Report 3 Andrew Wegener IMDL 2012.

PropaGator
Oral Report 3Andrew Wegener
IMDL 2012

Contents
•Objective•Mechanical Design•Electrical Design•Software Design•Future Applications•Questions

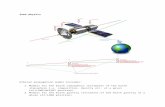
Objective• PropaGator is an
intelligent autonomous surface vehicle (ASV) designed to clean up the pollution in our oceans.
• PropaGator navigates to GPS waypoints that are known to have lots of pollution between them and nets are used to remove the pollutants from the ocean.

Mechanical Design▫Custom Fiberglass
Body Trimaran Design
▫Propelled by hacked bilge pump coupled to propeller
▫Rudder attached to servo for steering
▫Pontoons for stabilization

Electrical Design
▫Custom Control Board
▫Xbee for wireless communication
▫LCD feedback▫Sensors:
Micromag 3 Maxbotix Sonars EM-408 GPS

Software Design▫GPS Waypoint Navigation
Parse GPS Data(NMEA standard) Calculate desired heading
▫PD controller Sets rudder position based on
magnetometer heading and desired heading
▫Obstacle Avoidance Uses sonar to detect if object is
near and sets actuator values acordingly to avoid the object.

Future Applications
• Add water quality sensors(temperature and PH)
• Add a leak detection sensor • Add another water/air based robot to aid
PropaGator• Modify/redesign PropaGator to use
differential steering, brushless motors, and a monohull design

Questions