Project Portfolio - Abelardo Escoto
12
Project Portfolio - Abelardo Escoto Lung Cancer 1. InterNav: Navigation system for tumour localization and needle guidance. Objective: To develop a robotic platform for lung cancer brachytherapy and needle guidance interventions. Contributions: Sensorization of surgical instruments with position sensors. Mechanical design and manufacturing of adapters and holders for interfacing different instruments with the robotic arms. Software development for integration and control of the hardware. Development of a 3D virtual environment for real-time instrument guidance and teleoperation. Motion automation: automatic instrument alignment based on target location. Development of complex imaging processing algorithms using VTK and ITK. System validation with phantom models made out of agar and silicone, ex vivo and in vivo experiments. Figure 1. Robotic platform for lung brachytherapy. Ultrasound probe Brachytherapy instrument Endoscope
-
Upload
abelardo-escoto -
Category
Documents
-
view
14 -
download
3
Transcript of Project Portfolio - Abelardo Escoto

Project Portfolio - Abelardo Escoto
Lung Cancer
1. InterNav: Navigation system for tumour localization and needle guidance.
Objective:
To develop a robotic platform for lung cancer brachytherapy and needle guidance
interventions.
Contributions:
Sensorization of surgical instruments with position sensors.
Mechanical design and manufacturing of adapters and holders for interfacing
different instruments with the robotic arms.
Software development for integration and control of the hardware.
Development of a 3D virtual environment for real-time instrument guidance and
teleoperation.
Motion automation: automatic instrument alignment based on target location.
Development of complex imaging processing algorithms using VTK and ITK.
System validation with phantom models made out of agar and silicone, ex vivo and in
vivo experiments.
Figure 1. Robotic platform for lung brachytherapy.
Ultrasound
probe
Brachytherapy
instrument
Endoscope

Figure 2. GUI of the robotic platform for lung brachytherapy.
2. Surgical platform for cancer treatment
Objective:
To develop a smart surgical platform for tumour localization and treatment delivery of
lung cancer.
Contributions:
Project management: ensure proper completion of the project objectives, project
duration 2010-2014.
Mechanical design of the actuation system of a hand-held tumour localization device
grasper (IMAP).
Manufacturing and sensorization of the grasper jaws with tactile and ultrasound
sensors.
Software development for integration and control of the hardware.
Development of the control algorithm of the tumour localization device
Development of a teleoperation platform for controlling a parallel robot (Snipe) for
delivering cancer treatment.
System validation with phantom models made out of agar and silicone, ex vivo and in
vivo experiments.
Ultrasound
image
3D virtual world
Control Panel
Target
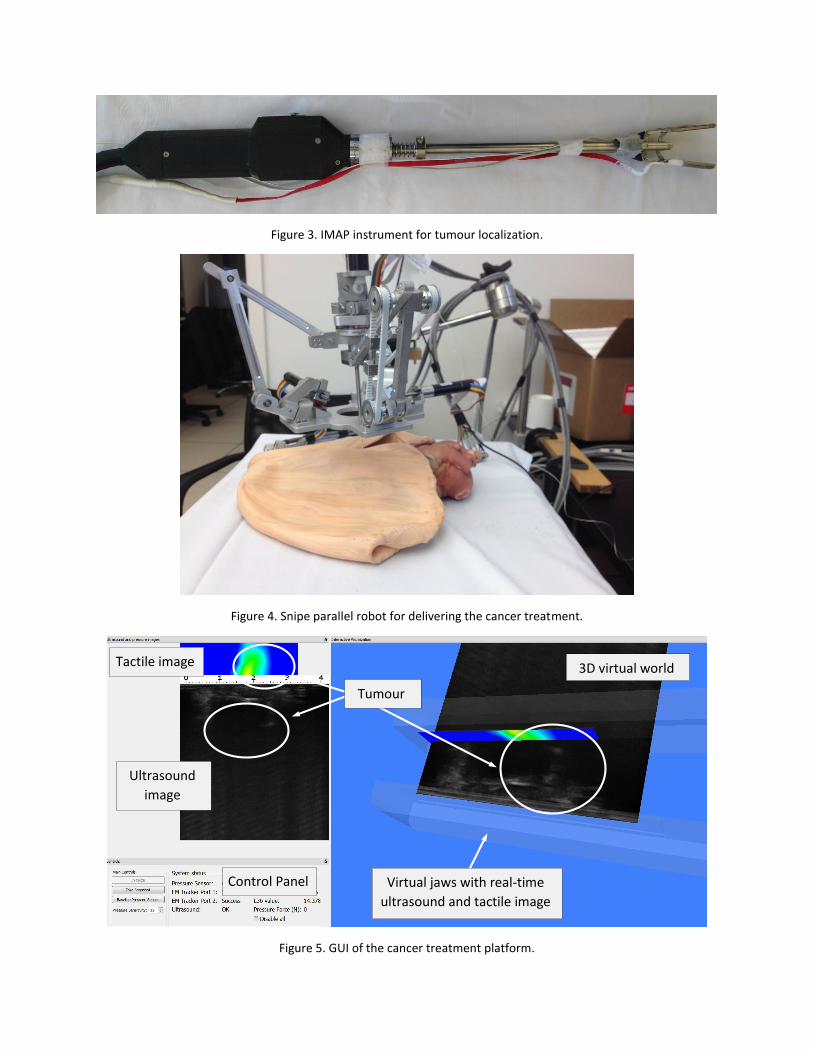
Figure 3. IMAP instrument for tumour localization.
Figure 4. Snipe parallel robot for delivering the cancer treatment.
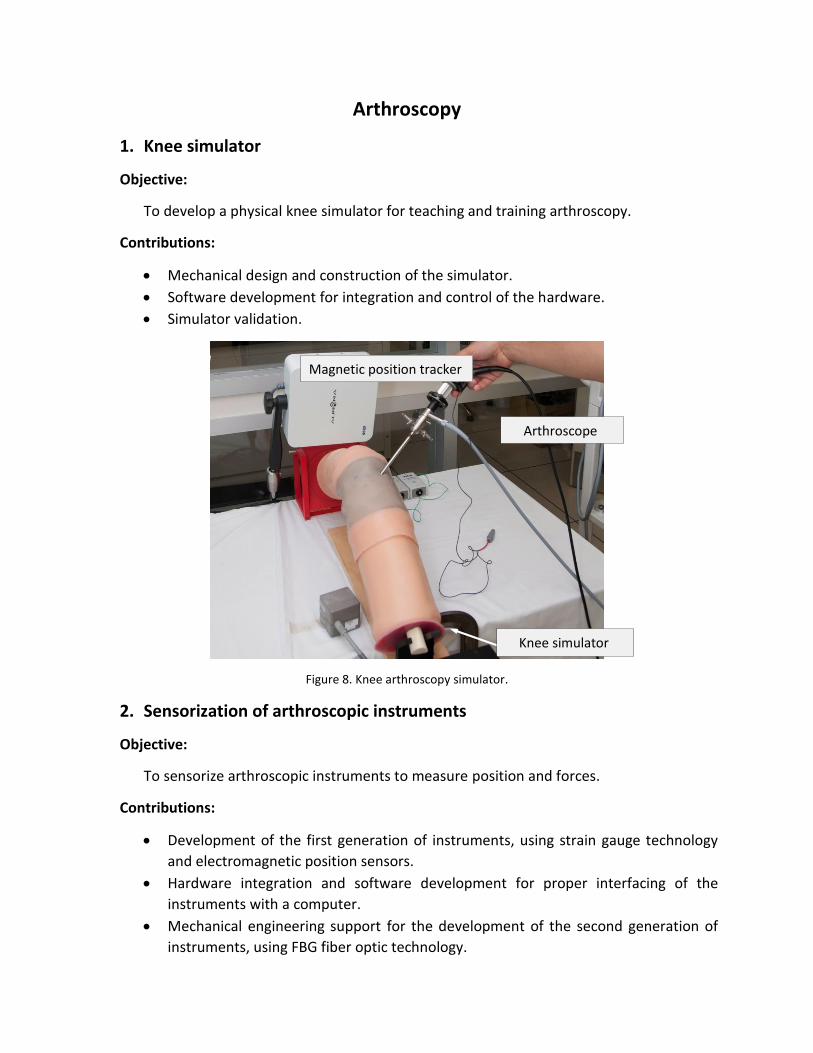
Figure 5. GUI of the cancer treatment platform.
Ultrasound
image
3D virtual world
Control Panel
Tumour
Tactile image
Virtual jaws with real-time
ultrasound and tactile image
feed

3. Single port minimally invasive instrument for cancer treatment
Objective:
To develop a single port instrument for cancer treatment.
Contributions:
Mechanical design, manufacturing and assembly of the instrument.
System validation with phantom experiments made out of agar.
Figure 6. End-effector of the single port instrument.
Figure 7. Single port instrument setup.
Needle
Ultrasound
Arthroscopy
1. Knee simulator
Objective:
To develop a physical knee simulator for teaching and training arthroscopy.
Contributions:
Mechanical design and construction of the simulator.
Software development for integration and control of the hardware.
Simulator validation.
Figure 8. Knee arthroscopy simulator.
2. Sensorization of arthroscopic instruments
Objective:
To sensorize arthroscopic instruments to measure position and forces.
Contributions:
Development of the first generation of instruments, using strain gauge technology
and electromagnetic position sensors.
Hardware integration and software development for proper interfacing of the
instruments with a computer.
Mechanical engineering support for the development of the second generation of
instruments, using FBG fiber optic technology.
Knee simulator
Magnetic position tracker
Arthroscope

Figure 9. Sensorized arthroscopic instruments.
3. Shoulder simulator
Objective:
To develop a physical shoulder simulator for teaching and training arthroscopy.
Contributions:
Engineering support for the development of the simulator.
Mechanical design of the simulator base.
Software development for integration and control of the hardware.
Development of the electronics and software required for sensorizing the simulator
with contact switches.
Figure 10. Shoulder arthroscopy simulator.

da Vinci Surgical Robot®
1. Robotic Tumour Localization Instrument
Objective:
To develop a robotic instrument for tumour localization.
Contributions:
Engineering support provided for the development of the instrument.
Software development for integrating the da Vinci Surgical System® and the da Vinci
Research Kit.
Figure 11. Robotic tumor localization instrument mounted on the da Vinci Surgical System®.
2. Force Feedback of Robotic Instruments
Objective:
To sensorize a robotic instrument for measuring forces.
Contributions:
Instrument modification and sensorization.
Instrument integration with the da Vinci Surgical System® and the da Vinci Research
Kit.
Tumour localization
instrument

FBG 1 & 2
FBG 3 & 4
Trocar
X
X
Y
γ
(a) (b)Z
Y
Figure 12. da Vinci surgical instrument sensorized with FBG sensors.
Concentric Tube Robots
1. Robotic Platform for Concentric Tube Manipulation:
Objective:
To design and develop a Concentric Tube Robot (CTR).
Contributions:
Mechanical design of the robotic manipulator of the CTR.
Manufacturing and assembly of the robotic manipulator.
Figure 13. Concentric Tube Robot.

Upper Limb Rehabilitation
1. Development of an upper limb rehabilitation brace:
Objective:
To develop a mechatronics brace for rehabilitation of the upper limb.
Contributions:
Engineering support provided for the development of the first prototype.
Manufacturing and assembly of the first prototype.
Mechanical design and development of the second prototype.
Figure 14. CAD model of the rehabilitation brace.

Figure 15. Second prototype of the rehabilitation brace.
Rehabilitation Teaching and Training
1. Sensorized glove for neck rehabilitation:
Objective:
To develop a sensorized glove for physical therapy teaching and training (neck
rehabilitation).
Contributions:
Design and development of the sensorized glove.
Sensor integration, electronics design and programing.
Software development for hardware communication and control.

Figure 16. Sensorized glove neck rehabilitaiton.
Figure 17. GUI of the sensorized glove.

Experience with the following hardware and equipment.
Motors, encoders, and motor controllers.
Linear and rotary stages.
Robotic arms.
Position, force, torque, strain, ultrasound, tactile, and optical fiber sensors.
Frame grabbers.
Data acquisition cards.
Haptic devices and manipulators.
Power supplies.
Oscilloscopes.
Arduino microcontrollers.
3D printers.
Ultrasound machines.
Machining equipment: micro CNC, wire EDM, and vacuum former machine.
Hydraulic pumps.
Laboratory equipment
Powered hand tools.
Several commercial surgical instruments.