Project Background
1
AR Drone Team Team Members: Manish Pati, LiBo Dong, Chun Ta Huang, Jose Jurado, Jit Ong,Fabian Widyadri Instructors: Shao-Fu Shih, Prof Charles Bouman, Prof. Samuel Midkiff Purdue University School of Electrical and Computer Engineering •AR Drone is French made robotic flying product that can be controlled by Iphone/Ipad via a wifi connection. •By modifying Drone’s the C programs, we can fly the AR Drone with joysticks freely. •We use Urbi and Gostai lab as new programming platform instead of using C programming. •Urbi used to control the AR Drone and track a ball or other functions using Gostai modules. • With the tracking info, AR Drone could navigate automatically. •AR Drone will be also capable be identifying different objects to accomplish tasks. Project Background Urbi is an open source cross-platform software platform in C++. Urbi is used to develop applications for robotics and complex systems. Urbi also includes the urbiscript orchestration language which is a parallel and event-driven script language. UObject components can be plugged into urbiscript and appear as native objects that can be scripted to specify their interactions and data exchange. Urbi Open source • Fixed the AR Drone and C programming codes so that AR Drone is able to fly again. • Remapping the joystick and the controller so that the AR Drone can fly with joystick freely using the AR.Drone SDK. • Moved to Urbi and the OpenCV platform instead of C programming for the robotic control. • Moved to Gustai Lab and Gustai Studio as new platform that can control the AR Drone. Progress Basic Drone Control In Gostai lab Gostai studio simu-link style programming Goal : To use the gostai lab to command the drone to complete various image processing based tasks Future goals • Use Urbi to control the AR Drone. • Make the AR Drone to track a ball and follow it. • Track different objects (other than balls) such as people. • Explore tasks other than tracking for the AR Drone. A.R. Drone Linux Windows, Linux, iOS Via Wi-Fi Joystick OpenCv Urbi Gostai Labs *NOTE: There are two ways of making the drone fly. Red designates the hard coded platform in C. The black track is the current model being used with Urbi.
description
AR Drone Team Team Members: Manish Pati , LiBo Dong, Chun Ta Huang, Jose Jurado, Jit Ong,Fabian Widyadri Instructors: Shao -Fu Shih, Prof Charles Bouman , Prof. Samuel Midkiff Purdue University School of Electrical and Computer Engineering. - PowerPoint PPT Presentation
Transcript of Project Background

AR Drone TeamTeam Members: Manish Pati, LiBo Dong, Chun Ta Huang,
Jose Jurado, Jit Ong,Fabian WidyadriInstructors: Shao-Fu Shih, Prof Charles Bouman,
Prof. Samuel MidkiffPurdue University
School of Electrical and Computer Engineering
• AR Drone is French made robotic flying product that can be controlled by Iphone/Ipad via a wifi connection.
• By modifying Drone’s the C programs, we can fly the AR Drone with joysticks freely.
• We use Urbi and Gostai lab as new programming platform instead of using C programming.
• Urbi used to control the AR Drone and track a ball or other functions using Gostai modules.
• With the tracking info, AR Drone could navigate automatically.
• AR Drone will be also capable be identifying different objects to accomplish tasks.
Project Background
Urbi is an open source cross-platform software platform in C++.
Urbi is used to develop applications for robotics and complex systems.
Urbi also includes the urbiscript orchestration language which is a parallel and event-driven script language. UObject components can be plugged into urbiscript and appear as native objects that can be scripted to specify their interactions and data exchange.
Urbi Open source
• Fixed the AR Drone and C programming codes so that AR Drone is able to fly again.
• Remapping the joystick and the controller so that the AR Drone can fly with joystick freely using the AR.Drone SDK.
• Moved to Urbi and the OpenCV platform instead of C programming for the robotic control.
• Moved to Gustai Lab and Gustai Studio as new platform that can control the AR Drone.
Progress
Basic Drone Control In Gostai lab
Gostai studio simu-link style programming
Goal : To use the gostai lab to command the drone to complete various image processing based tasks
Future goals• Use Urbi to control the AR Drone.• Make the AR Drone to track a ball and follow it. • Track different objects (other than balls) such as
people.• Explore tasks other than tracking for the AR Drone.
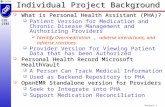
A.R. Drone Linux
Windows, Linux, iOS
Via Wi-Fi
Joystick
OpenCv
Urbi
Gostai Labs
*NOTE: There are two ways of making the drone fly. Red designates the hard coded platform in C. The black track is the current model being used with Urbi.