
Premium and Atrium using Unity Pro - Fipway Network - User ...

Premium y Atrium con EcoStruxure™ Control Expert
35008150 12/2018
3500
8150
.13
www.schneider-electric.com
Premium y Atrium con EcoStruxure™ Control ExpertBus de campo CANopenManual del usuario(Traducción del documento original inglès)
12/2018

La información que se ofrece en esta documentación contiene descripciones de carácter general y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta publicación, le rogamos que nos lo notifique. Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla "tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo podrá realizarlas el fabricante.Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las instrucciones pertinentes. Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.© 2018 Schneider Electric. Reservados todos los derechos.
2 35008150 12/2018

Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 7Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Capítulo 1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Principios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Arquitectura general del bus de campo CANopen . . . . . . . . . . . . . . . 13Velocidad de transmisión y longitud de cable . . . . . . . . . . . . . . . . . . . 15Limitaciones de los cables de derivación . . . . . . . . . . . . . . . . . . . . . . 17Descripción general de fases de instalación . . . . . . . . . . . . . . . . . . . . 19
Capítulo 2 Presentación de la tarjeta PCMCIA TSX CPP 110. . . . . 212.1 Descripción de la tarjeta TSX CPP 110. . . . . . . . . . . . . . . . . . . . . . . . 22
Información relativa a la tarjeta TSX CPP 110 . . . . . . . . . . . . . . . . . . 23Montaje de la tarjeta TSX CPP 110. . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 Especificaciones técnicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Estándares y características . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Características CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Los procesadores admiten la tarjeta TSX CPP 110 . . . . . . . . . . . . . . 30
Capítulo 3 Instalación del software . . . . . . . . . . . . . . . . . . . . . . . . . 313.1 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Principio de instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Método de implementación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Direccionamiento topológico CANopen. . . . . . . . . . . . . . . . . . . . . . . . 36
3.2 Configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Cómo acceder a la pantalla Configuración . . . . . . . . . . . . . . . . . . . . . 38Pantalla de configuración de la tarjeta PCMCIA TSX CPP 110 . . . . . 40Descripción de los datos de E/S y del comportamiento del bus al inicio 43Cómo seleccionar la modalidad de carga de configuración . . . . . . . . 46Carga de configuración mediante X-Way . . . . . . . . . . . . . . . . . . . . . . 48Pantalla de configuración de los esclavos. . . . . . . . . . . . . . . . . . . . . . 50Cómo configurar una tarjeta PCMCIA CANopen . . . . . . . . . . . . . . . . 51Bus CANopen mostrado en el explorador de proyectos . . . . . . . . . . . 53Archivo de configuración de la tarjeta PCMCIA TSX CPP 110 . . . . . . 54
3.3 Programación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Acceso a los SDO de CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57Solicitud de IDENTIFICACIÓN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Comando Diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
35008150 12/2018 3

3.4 Depurar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70Descripción de la pantalla Depuración. . . . . . . . . . . . . . . . . . . . . . . . . 70
3.5 Diagnósticos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Diagnósticos mediante los LED de estado de la tarjeta PCMCIA TSX CPP 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Datos de diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Realización de un diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Capítulo 4 Objetos de lenguaje CANopen. . . . . . . . . . . . . . . . . . . . . 834.1 Objetos de lenguaje e IODDT para la comunicación CANopen . . . . . 84
Introducción a los objetos de lenguaje para la comunicación CANopen 85Intercambio implícito de objetos de lenguaje asociados a la función específica de la aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86Objetos de lenguaje de intercambio explícito asociados con la función específica de aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Gestión de intercambios e informes con objetos explícitos . . . . . . . . . 89
4.2 Los objetos de lenguaje y el IODDT genérico aplicable a los protocolos de comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94Detalles de los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95Detalles de los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.3 Objetos de lenguaje del IODDT específico de CANopen . . . . . . . . . . 98Detalles de objetos de intercambio implícito del IODDT de tipo T_COM_CPP110 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99Detalles de objetos de intercambio implícito de tipo T_COM_CPP110 no pertenecientes al IODDT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103Objetos de lenguaje de intercambio explícito del IODDT T_COM_CPP110 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.4 El IODDT T_GEN_MOD aplicable a todos los módulos. . . . . . . . . . . . 105Detalles de los objetos de lenguaje del IODDT de tipo T_GEN_MOD. 105
4.5 Objetos de lenguaje de configuración CANopen . . . . . . . . . . . . . . . . . 107Objetos de lenguaje asociados con la configuración . . . . . . . . . . . . . . 107
4.6 Códigos de error CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109Códigos de error CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Capítulo 5 Ejemplos de instalación del bus CANopen. . . . . . . . . . . . 1155.1 Descripción del ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Descripción del ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1165.2 Instalación del hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Configuración de hardware islotes Advantys . . . . . . . . . . . . . . . . . . . . 118Configuración del hardware del maestro . . . . . . . . . . . . . . . . . . . . . . . 121Configuración de hardware del bus . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
4 35008150 12/2018

5.3 Implementación del software. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Configuración de software Advantys . . . . . . . . . . . . . . . . . . . . . . . . . . 126Declaración del maestro CANopen con Sycon e importación EDS . . 132Configuración del bus CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Declaración de los nodos 2 y 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136Configuración de los nodos 2 y 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138Configuración de la tarjeta PCMCIA TSX CPP 110 . . . . . . . . . . . . . . 140Depuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Apéndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147Apéndice A Ejemplo de configuración para dispositivos del bus
CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Configuración de un controlador de velocidad Altivar . . . . . . . . . . . . . 150Configuración de un variador Lexium . . . . . . . . . . . . . . . . . . . . . . . . . 153Configuración de más de 4 PDO por nodo . . . . . . . . . . . . . . . . . . . . . 156
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
35008150 12/2018 5

6 35008150 12/2018

Información de seguridad
Información importante
AVISOLea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos procedimientos.
35008150 12/2018 7

TENGA EN CUENTA LO SIGUIENTE:La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna de las consecuencias del uso de este material.Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.
8 35008150 12/2018
Acerca de este libro
Presentación
ObjetoEn este manual se presenta la comunicación CANopen en los PLC Premium y Atrium.
Campo de aplicaciónEsta documentación es válida para EcoStruxure™ Control Expert 14.0 o posterior.
Información relativa al producto
ADVERTENCIAFUNCIONAMIENTO IMPREVISTO DEL EQUIPO La aplicación de este producto requiere experiencia en el diseño y la programación de sistemas de control. Sólo debe permitirse a las personas con dicha experiencia programar, instalar, modificar y aplicar este producto.Siga todas las normativas de seguridad nacionales y locales.El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
35008150 12/2018 9

10 35008150 12/2018

Premium y Atrium con EcoStruxure™ Control ExpertGeneral35008150 12/2018
General
Capítulo 1General
Finalidad de este capítuloEn este capítulo se describen las principales características técnicas de la comunicación CANopen.
Contenido de este capítuloEste capítulo contiene los siguientes apartados:
Apartado PáginaPrincipios 12Arquitectura general del bus de campo CANopen 13Velocidad de transmisión y longitud de cable 15Limitaciones de los cables de derivación 17Descripción general de fases de instalación 19
35008150 12/2018 11

General
Principios
IntroducciónEl bus de comunicación CAN se desarrolló originalmente para los sistemas integrados de los automóviles, y en la actualidad se emplea en una amplia variedad de áreas, como por ejemplo: Transporte, equipos móviles, equipos médicos, construcción y control industrial.Los puntos fuertes del sistema CAN son los siguientes: Sistema de asignación de bus, Capacidad de detección de errores, Fiabilidad de los intercambios de datos.
Estructura maestro/esclavoEl bus CAN tiene una estructura de gestión de bus maestro/esclavo. El maestro gestiona lo siguiente: La inicialización de los esclavos, los errores de comunicación y los estados de los esclavos.
Comunicación de igual a igualLa comunicación en el bus funciona según el método de igual a igual, en el que cada dispositivo puede enviar, en cualquier momento, una solicitud al bus, a la que responden los dispositivos implicados. La prioridad de las peticiones que circulan en el bus se determina por medio de un identificador para cada mensaje.
Identificadores CANLos intercambios explícitos de las PDU CAN a nivel de vínculo utilizan identificadores de formato ampliado (29 bits) (estándar CAN V2.0B).También se pueden utilizar identificadores de 11 bits (estándar CAN V2.0A) para enviar solicitudes, pero este tipo de identificador no se puede recibir.
12 35008150 12/2018

General
Arquitectura general del bus de campo CANopen
PresentaciónLa arquitectura CANopen se compone de: un maestro del bus (tarjeta PCMCIA TSX CPP 110), dispositivos esclavo.NOTA: También es posible conectar varias tarjetas PCMCIA TSX CPP 110 en el bus, una de ellas como maestro y todas las demás en modo de escucha. Las tarjetas en modo de escucha permiten a los PLC Premium a los que están conectadas conocer el estado del bus y de los esclavos del bus en todo momento. CANopen admite 128 dispositivos (en concreto el maestro del bus añade 127 esclavos remotos).La velocidad de transmisión depende estrictamente de la longitud del bus y del tipo de cable usado.NOTA: Para configurar un bus CANopen, utilice el software Sycon, versión 2.8 o superior.
35008150 12/2018 13

General
Ejemplo de un busEn la siguiente figura se muestra un ejemplo de un bus CANopen, que se describirá con más detalle al final de este documento, en el ejemplo de implementación de un bus CANopen.
Para obtener más detalles, consulte el manual de instalación del hardware CANopen disponible en telemecanique.com
14 35008150 12/2018

General
Velocidad de transmisión y longitud de cable
PresentaciónCANopen admite hasta 127 dispositivos (el maestro del bus y 126 esclavos remotos). La velocidad de transmisión depende estrictamente del tipo de cable usado.En el protocolo CAN, la prioridad de las tramas se gestiona por una colisión entre los niveles dominantes y recesivos de la línea. Esta colisión debe resolverse durante la transmisión de un bit, lo que limita el tiempo de propagación de la señal entre dos nodos.En las siguientes tablas se especifica la longitud máxima de cable principal en función del cable CANopen que proporciona Schneider Electric (TSXCANCA•••, TSXCANCB••• y TSXCANCD•••).
Longitud máxima del cableComo consecuencia, la distancia máxima entre los dos nodos más alejados de un bus CAN depende de la velocidad, y se detalla en la tabla siguiente:
Según la estrategia de red de Schneider Electric, se recomienda utilizar las velocidades 1 Mbit/s, 800 kbit/s, 500 kbit/s, 250 kbit/s y 125 kbit/s para las soluciones de automatización en el nivel de máquina y de instalación.NOTA: La longitud máxima asume un tiempo razonable de propagación interna del dispositivo y punto de muestra de bit. Los dispositivos que presenten tiempos largos de propagación interna reducirán por este motivo la longitud máxima del cable que de otra manera se podría alcanzar.Las longitudes de cable de la tabla anterior pueden incluir un cable de derivación si está en el extremo físico del cable principal.
Velocidad en bit/s Longitud máxima del cable1 Mbit/s 20 m (65 ft)800 kbit/s 40 m (131 ft)500 kbit/s 100 m (328 ft)250 kbit/s 250 m (820 ft)125 kbit/s 500 m (1.640 ft)50 kbit/s 1.000 m (3.280 ft)20 kbit/s 2.500 m (8.202 ft)10 kbit/s 5.000 m (16.404 ft)
35008150 12/2018 15

General
Los repetidores reducen la longitud del cableLos valores anteriores especifican la longitud máxima del cable sin ningún repetidor. Como los repetidores añaden un tiempo de propagación en el bus, este tiempo reduce la longitud máxima del bus. Un retardo de propagación de 5 ns produce una reducción de longitud de 1 m (3 ft).Ejemplo: Un repetidor con un tiempo de propagación de 150 ns reduce la longitud máxima del cable en 30 m (98 ft).
Longitud máxima del cable frente a número de nodosAdemás de las limitaciones de longitud basadas en la velocidad de transmisión, la resistencia de carga también influye en la longitud máxima del cable.En cualquier caso, el número máximo de nodos que se pueden conectar en el mismo segmento está restringido a 64. Para conectar más nodos a un segmento, hay que utilizar un repetidor.En la tabla siguiente se muestra la influencia del número de nodos en la longitud del cable:
Aislamiento eléctrico de dispositivos CANopenEn los documentos sobre CANopen se suele encontrar el valor de 40 m (131 ft) como máximo con una velocidad de transmisión de 1 Mbit/s. Esta longitud está calculada sin aislamiento eléctrico, tal y como se utiliza en los dispositivos CANopen de Schneider Electric.Con dicho aislamiento eléctrico la longitud mínima de red calculada es de 4 m (13 ft) con una velocidad de transmisión de 1 Mbit/s. Sin embargo, la experiencia demuestra que 20 m (65 ft) es la longitud práctica que se puede acortar por derivaciones y otras influencias.
Número de nodos Longitud máxima del cable2 229 m (751,31 ft)16 210 m (688,97 ft)32 195 m (639,76 ft)64 170 m (557,74 ft)
16 35008150 12/2018

General
Limitaciones de los cables de derivación
Descripción generalUn cable de derivación crea un reflejo de la señal en la línea de transmisión característico del cable principal. Para minimizar los reflejos, los cables de derivación deben ser lo más cortos posible.
Longitud máxima del cable de derivaciónRespete los valores enumerados en la tabla siguiente:
Lmax es la longitud máxima de un cable de derivación.ΣLmax es el valor máximo de la suma de cables de derivación en la misma caja de derivación.Distancia entre cajas de derivación es la distancia mínima necesaria entre dos cajas de derivación y puede calcularse para cada una de ellas (debe ser mayor que el 60% del más largo de los dos valores de ΣLmax).ΣLGmax es el valor máximo de la suma de cables de derivación en la red.
Velocidad de transmisión
Lmax ΣLmax Distancia entre cajas de derivación
ΣLGmax
1 Mbit/s 0,3 m (0,98 ft) 0,6 m (0,98 ft) 1,5 m (4,92 ft)800 kbit/s 3 m (9,84 ft) 6 m (19,68 ft) 3,6 m (11,81 ft) 15 m (49,21 ft)500 kbit/s 5 m (16,4 ft) 10 m (32,8 ft) 6 m (19,68 ft) 30 m (98,42 ft)250 kbit/s 5 m (16,4 ft) 10 m (32,8 ft) 6 m (19,68 ft) 60 m (196,84 ft)125 kbit/s 5 m (16,4 ft) 10 m (32,8 ft) 6 m (19,68 ft) 120 m (393,69 ft)50 kbit/s 60 m (196,84 ft) 120 m (393,69 ft) 72 m (236,21 ft) 300 m (984,24 ft)20 kbit/s 150 m (492,12 ft) 300 m (984,24 ft) 180 m (590,54 ft) 750 m (2.460,62 ft)10 kbit/s 300 m (984,24 ft) 600 m (1.968,49 ft) 360 m (1.181,09 ft) 1.500 m (4.921,24 ft)
35008150 12/2018 17

General
Ejemplo de cálculoEn la ilustración siguiente se proporciona un ejemplo de un cálculo de distancia entre cajas de derivación con dos cajas y seis dispositivos:
La distancia entre cajas de derivación en el ejemplo anterior se calcula de la manera siguiente:
Respete la distancia entre las cajas de derivación aunque haya un dispositivo en medio.
Paso Descripción Resultado1 Calcular la suma de las longitudes de
los cables de derivación para cada caja de derivación
5 m (16 ft) y 7 m (22 ft)
2 Mantener la longitud más larga. 7 m (22 ft)3 Calcular la longitud mínima del cable
entre dos cajas de derivación.60% de 7 m (22 ft)
18 35008150 12/2018

General
Descripción general de fases de instalación
IntroducciónLa instalación del software de los módulos específicos de la aplicación se realiza desde los diferentes editores de Control Expert: en modalidad offline en modalidad onlineSi no dispone de un procesador al que conectarse, Control Expert permite realizar una comprobación inicial mediante el simulador. En este caso, la instalación (véase página 20) es diferente.Se recomienda el siguiente orden de instalación, aunque es posible cambiar el orden de ciertas fases (por ejemplo, comenzar por la fase de configuración).
Fases de instalación con procesadorEn la tabla siguiente se presentan las diferentes fases de puesta en marcha con el procesador:
Fase Descripción ModalidadDeclaración de variables Declaración de las variables de tipo IODDT para los
módulos específicos de la aplicación y para las variables del proyecto.
Offline (1)
Programación Programación del proyecto. Offline (1)Configuración Declaración de los módulos. Offline
Configuración del canal del módulo.Introducción de los parámetros de configuración.
Asociación Asociación de los IODDT con los canales configurados (editor de variables).
Offline (1)
Generación Generación del proyecto (análisis y edición de enlaces). OfflineTransferencia Transferir proyecto al PLC. OnlineAjuste/depuración Depuración del proyecto desde las pantallas de depuración
y tablas de animación.Online
Modificación del programa y parámetros de ajuste.Documentación Diseño del archivo de documentación e impresión de
documentación diversa en relación con el proyecto.Online (1)
Funcionamiento/diagnóstico Visualización de información diversa necesaria para el control y la supervisión del proyecto.
Online
Diagnóstico del proyecto y los módulos. Clave:(1) Estas fases también pueden llevarse a cabo en el otro modo.
35008150 12/2018 19
General
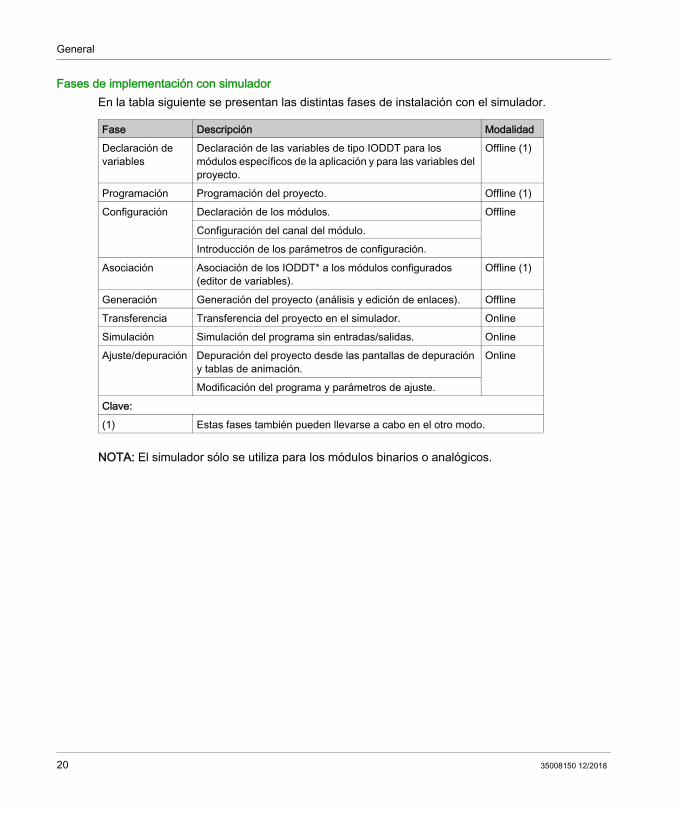
Fases de implementación con simuladorEn la tabla siguiente se presentan las distintas fases de instalación con el simulador.
NOTA: El simulador sólo se utiliza para los módulos binarios o analógicos.
Fase Descripción ModalidadDeclaración de variables
Declaración de las variables de tipo IODDT para los módulos específicos de la aplicación y para las variables del proyecto.
Offline (1)
Programación Programación del proyecto. Offline (1)Configuración Declaración de los módulos. Offline
Configuración del canal del módulo.Introducción de los parámetros de configuración.
Asociación Asociación de los IODDT* a los módulos configurados (editor de variables).
Offline (1)
Generación Generación del proyecto (análisis y edición de enlaces). OfflineTransferencia Transferencia del proyecto en el simulador. OnlineSimulación Simulación del programa sin entradas/salidas. OnlineAjuste/depuración Depuración del proyecto desde las pantallas de depuración
y tablas de animación.Online
Modificación del programa y parámetros de ajuste.Clave:(1) Estas fases también pueden llevarse a cabo en el otro modo.
20 35008150 12/2018

Premium y Atrium con EcoStruxure™ Control ExpertTarjeta PCMCIA TSX CPP 11035008150 12/2018
Presentación de la tarjeta PCMCIA TSX CPP 110
Capítulo 2Presentación de la tarjeta PCMCIA TSX CPP 110
ObjetoEn este capítulo se presentan las características técnicas principales de una tarjeta PCMCIA TSX CPP 110.
Contenido de este capítuloEste capítulo contiene las siguientes secciones:
Sección Apartado Página2.1 Descripción de la tarjeta TSX CPP 110 222.2 Especificaciones técnicas 27
35008150 12/2018 21

Tarjeta PCMCIA TSX CPP 110
Descripción de la tarjeta TSX CPP 110
Sección 2.1Descripción de la tarjeta TSX CPP 110
ObjetoEn esta sección se describe el aspecto físico de la tarjeta PCMCIA TSX CPP 110 y su sistema de conexión.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaInformación relativa a la tarjeta TSX CPP 110 23Montaje de la tarjeta TSX CPP 110 25
22 35008150 12/2018

Tarjeta PCMCIA TSX CPP 110
Información relativa a la tarjeta TSX CPP 110
PresentaciónLa tarjeta de comunicación CANopen TSX CPP 110 se utiliza para implementar una arquitectura CANopen. Esta tarjeta es el maestro del bus y permite la conexión de dispositivos que cumplen el estándar CANopen: Intercambio implícito del Objeto de Datos del Proceso mediante palabras %MW. Intercambio explícito de Objetos de Datos de Servicio a través de bloques de funciones
READ_VAR y WRITE_VAR. Compatibilidad con perfiles de dispositivo estandarizados y comunicación en CANopen (2.0A y
2.0B).NOTA: La tarjeta TSX CPP 110 autoriza una configuración máxima de 64 kB.
Descripción físicaLa tarjeta TSX CPP 110 es una tarjeta PCMCIA de tipo III que se inserta en el slot de comunicación PCMCIA del procesador.Las tarjetas PCMCIA CANopen de tipo III (TSX CPP 110) se pueden utilizar en los slots PCMCIA de todos los PLC que se puedan programar mediante software Control Expert.Este módulo está formado por los siguientes elementos:
35008150 12/2018 23

Tarjeta PCMCIA TSX CPP 110
DescripciónEn la siguiente tabla se describen los elementos de la figura anterior.
Número Descripción1 Soportes de fijación, arriba y abajo de la tarjeta, que se utilizan para conectarla
al procesador.2 LED, que se utilizan para diagnosticar las operaciones de la tarjeta de
comunicación (véase página 73).3 Cable de bus, este cable de 50 cm lleva en su extremo una caja de derivación
industrial CANopen.
24 35008150 12/2018

Tarjeta PCMCIA TSX CPP 110
Montaje de la tarjeta TSX CPP 110
Tarjeta PCMCIA TSX CPP 110La tarjeta PCMCIA TSX CPP 110 con su TAP (caja de derivación) industrial permite la conexión entre la CPU Premium y una red CANopen.NOTA: No se puede utilizar el módulo de comunicación Modbus TSX SCY 2160•.
En la tabla siguiente se describe el procedimiento para instalar una tarjeta TSX CPP 110.
ATENCIÓNTARJETA PCMCIA DAÑADAPara insertar o extraer una tarjeta PCMCIA, el PLC debe estar apagado.El incumplimiento de estas instrucciones puede causar lesiones o daño al equipo.
Paso Acción Ilustración1 Apagar el PLC.2 Insertar la tarjeta
PCMCIA tipo III CANopen en el slot PCMCIA de la CPU Premium.
35008150 12/2018 25

Tarjeta PCMCIA TSX CPP 110
3 Atornillar bien la tarjeta para garantizar su correcto funcionamiento.
4 Instalar la caja de derivación en un segmento DIN.
5 Encender de nuevo el PLC.
Paso Acción Ilustración
26 35008150 12/2018

Tarjeta PCMCIA TSX CPP 110
Especificaciones técnicas
Sección 2.2Especificaciones técnicas
ObjetoEn esta sección se describen las principales características técnicas de la tarjeta TSX CPP 110.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaEstándares y características 28Características CANopen 29Los procesadores admiten la tarjeta TSX CPP 110 30
35008150 12/2018 27

Tarjeta PCMCIA TSX CPP 110
Estándares y características
NormasLa tarjeta de comunicación TSX CPP 110 cumple los siguientes estándares internacionales:
Características eléctricas Alimentación V cc lógica: 5 V proporcionados por la alimentación del bastidor Consumo de alimentación: 3 W
Características medioambientales Temperatura de almacenamiento: de -25 °C a 70 °C Temperatura de funcionamiento: de -0 °C a 70 °C Hidrometría de almacenamiento de 30% a 95% sin condensación Hidrometría de funcionamiento: de 5% a 95% sin condensación
Estándares internacionales ISO IS 11898, nivel de vínculo de datos y transceptor de alta velocidad CAN
Estándares de EE.UU. UL508Estándares de radiación Etiqueta EC, FCC-B (50082-1)
28 35008150 12/2018

Tarjeta PCMCIA TSX CPP 110
Características CANopen
NormasLa tarjeta de comunicación TSX CPP 110 cumple el estándar DS301 V4.01.
Características específicas El usuario puede seleccionar una asignación de contenido PDO compatible con el estándar
DS301 V4.01. La tarjeta TSX CPP 110 admite la función de "heartbeat" (DS 301V4.01). La tarjeta TSX CPP 110 es normalmente el maestro de gestión de redes (NMT_MASTER) en
el bus (esta función se puede deshabilitar mediante SyCon). La tarjeta TSX CPP 110 produce normalmente la variable de sincronización (SYNC) (esta
función se puede deshabilitar mediante SyCon). El ID de nodo de la tarjeta TSX CPP 110 no se puede utilizar para la transferencia de datos.
Sólo se emplea para la función "heartbeat".
35008150 12/2018 29

Tarjeta PCMCIA TSX CPP 110
Los procesadores admiten la tarjeta TSX CPP 110
PresentaciónTodos los procesadores Premium y Atrium son compatibles con la tarjeta CANopen PCMCIA. La tarjeta se implementa mediante el software de Control Expert.La configuración general de un bus CANopen se define utilizando el software Sycon 2.8 o posterior (TLX LFBCM).NOTA: Es obligatorio que la tarjeta PCMCIA se instale en el slot situado en el módulo del procesador. En consecuencia, sólo hay disponible un bus CANopen disponible para cada CPU del PLC.
Tipos de procesadores y capacidadesEn la siguiente tabla se proporcionan detalles de los procesadores compatibles con la tarjeta PCMCIA CANopen TSX CPP 110 y sus capacidades máximas de almacenamiento.
NOTA: La velocidad para completar la configuración viene dada en la palabra %KWm.1.2 (véase página 107).
Procesador Tamaño máximo de los datos de configuración de TSX CPP 110 ubicados en el procesador(1)
Tamaño máximo de los datos de entrada/salida para la configuración del nodo de CANopenTarea MAST Tarea FAST
TSX P57 0••TSX P57 1••TSX P57 1•••
12 kb 384 %MW(192+192)
48 %MW(24+24)
TSX P57 2••TSX P57 2•••TSX PCI 57 204
16 kb 512 %MW(256+256)
64 %MW(32+32)
TSX P57 3•• TSX P57 3•••TSX PCI 57 354
32 kb 1024 %MW(512+512)
128 %MW(64+64)
TSX P57 4•• TSX P57 4••• TSX P57 5••TSX P57 5••• TSX P57 6•••
64 kb 3584 %MW(1792+1792)
512 %MW (2)
(256+256)
Tecla (1): Este tamaño máximo se puede exceder si carga la configuración en la tarjeta mediante el software Sycon (véase página 46). El tamaño máximo de los datos de configuración autorizado por el software Sycon es de 64 kB.(2): El tamaño máximo de datos de entrada/salida para la configuración del nodo CANopen (tarea FAST) es de 1024 %MW (512+512) para TSX P57 554, TSX P57 5634 y TSX P57 6634 con versión de firmware V3.0.
30 35008150 12/2018
Premium y Atrium con EcoStruxure™ Control ExpertInstalación del software35008150 12/2018
Instalación del software
Capítulo 3Instalación del software
Finalidad de este capítuloEn este capítulo se describen las diferentes posibilidades de configuración, control y diagnóstico en aplicaciones CANopen.
Contenido de este capítuloEste capítulo contiene las siguientes secciones:
Sección Apartado Página3.1 Generalidades 323.2 Configuración 373.3 Programación 563.4 Depurar 703.5 Diagnósticos 72
35008150 12/2018 31

Instalación del software
Generalidades
Sección 3.1Generalidades
ObjetoEn esta sección se describe la instalación del software de una tarjeta PCMCIA TSX CPP 110.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaPrincipio de instalación 33Método de implementación 34Direccionamiento topológico CANopen 36
32 35008150 12/2018

Instalación del software
Principio de instalación
PresentaciónPara implementar un bus CANopen, es necesario definir el contexto físico de la aplicación en la que se va a integrar (bastidor, alimentación, procesador, módulos o dispositivos, etc.). A continuación, debe asegurarse de que se implementa el software necesario.Su implementación de software se realiza con los diferentes editores de Control Expert: En modalidad offline O bien en modalidad online: aquí, las modificaciones están limitadas a determinados
parámetros.El bus se configura mediante el software Sycon.
Principio de instalaciónEn la tabla siguiente se muestran las diferentes fases de implementación.
NOTA: El orden mostrado anteriormente es sólo con fines informativos. El software Control Expert permite utilizar los editores en el orden deseado y de forma interactiva (sin embargo, el editor de datos o programas no se puede usar sin haber realizado primero la configuración).
Modalidad Fase DescripciónOffline Declaración de la tarjeta
TSX CPP 110 PCMCIALa tarjeta se debe instalar en el slot PCMCIA tipo III del procesador.
Configuración Parametrización de la configuración. Declaración de la configuración del bus mediante el software
Sycon y generación del archivo de configuración *.CO. Selección del archivo de configuración *.CO mediante Control
Expert.Offline u online Simbolización Simbolización de las variables asociadas con la tarjeta CANopen.
Programación Programación de las funciones específicas: Objetos de bit y palabras asociadas Instrucciones específicas
Online Transferencia Transferencia de la aplicación al PLCSe inicia una transferencia de la aplicación al PLC o inicio en frío del resultado de la aplicación y se configura la tarjeta TSX CPP 110.
DepuraciónDiagnóstico
Existen varios recursos disponibles para la depuración de la aplicación, el control de entradas/salidas y la detección de fallos: Objetos de lenguaje e IODDT. La pantalla de depuración de Control Expert. La señalización mediante indicadores LED.
Offline u online Documentación La impresión de información relacionada con la configuración de la tarjeta TSX CPP 110.
35008150 12/2018 33
Instalación del software
Método de implementación
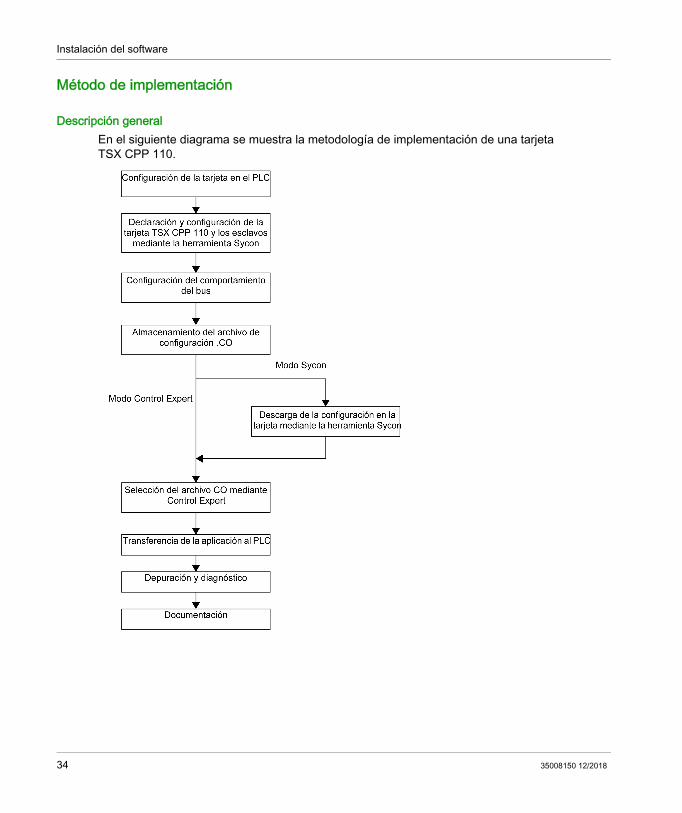
Descripción generalEn el siguiente diagrama se muestra la metodología de implementación de una tarjeta TSX CPP 110.
34 35008150 12/2018
Instalación del software
RecomendacionesCuando la configuración del bus CANopen es demasiado grande como para permitir el cambio a la modalidad de Control Expert, debe llevar a cabo las siguientes comprobaciones: Vea si puede permanecer en la modalidad de Control Expert con un procesador Premium más
potente (véase página 30). Si no es posible seleccionar un procesador más potente, cambie al modo Sycon.
35008150 12/2018 35

Instalación del software
Direccionamiento topológico CANopen
PresentaciónLos buses CANopen incluyen direccionamiento topológico (que depende de la posición geográfica del elemento que se va a dirigir).No obstante, se diferencia ligeramente del direccionamiento topológico Fipio.
IlustraciónEl direccionamiento se define de la siguiente manera:
SintaxisEn la siguiente tabla se describen los distintos elementos que componen el direccionamiento.
Familia Elemento Valores SignificadoSímbolo: % - Indica un objeto IEC.Tipo de objeto I
Q--
Objetos de entrada.Objetos de salida.Esta información se intercambia automáticamente en cada ciclo de la tarea con la que está asociada la tarjeta CANopen (MAST o FAST).
Formato (tamaño)
W 16 bits Palabra de tipo WORD de 16 bits.
Dirección de módulo/canal y punto de conexión
b 3 a 999 Número de bus.e 1 a 127 Número de punto de conexión (número de esclavo CANopen).
Número de bastidor
r 0 Número de bastidor virtual, siempre 0.
Nº de módulo m 0 Número de módulo virtual, siempre 0.Nº de canal c 0 Número de canal virtual, siempre 0.Nº de datos del canal
d 0 a 59 Número de datos de esclavo. 59 como máximo, ya que un esclavo sólo puede tener 60 palabras de entrada y salida como máximo (la suma de todas las palabras de entrada/salida debe ser inferior a 60).
36 35008150 12/2018

Instalación del software
Configuración
Sección 3.2Configuración
Finalidad de esta secciónEn esta sección se describe la configuración de una tarjeta PCMCIA TSX CPP 110.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaCómo acceder a la pantalla Configuración 38Pantalla de configuración de la tarjeta PCMCIA TSX CPP 110 40Descripción de los datos de E/S y del comportamiento del bus al inicio 43Cómo seleccionar la modalidad de carga de configuración 46Carga de configuración mediante X-Way 48Pantalla de configuración de los esclavos 50Cómo configurar una tarjeta PCMCIA CANopen 51Bus CANopen mostrado en el explorador de proyectos 53Archivo de configuración de la tarjeta PCMCIA TSX CPP 110 54
35008150 12/2018 37

Instalación del software
Cómo acceder a la pantalla Configuración
ProcedimientoEsta operación se utiliza para declarar una tarjeta TSX CPP 110 en el slot PCMCIA tipo III del procesador. El ejemplo siguiente define el procedimiento que debe seguirse.
Paso Acción1 Abrir el editor de configuración de hardware desde el explorador de la aplicación.2 Hacer doble clic en el slot de la tarjeta PCMCIA colocado en la parte inferior del procesador.
Resultado: Aparece la lista siguiente.
3 Abra la línea Comunicación haciendo clic en esta línea + para obtener una lista de las tarjetas de comunicación disponibles para este slot.Resultado: Aparece la lista siguiente.
4 Seleccione la tarjeta TSX CPP 110 y, a continuación, confirme con Aceptar.Resultado: El software muestra el nuevo editor de configuración X-Bus, y ahora puede tener acceso a la pantalla de configuración de la tarjeta PCMCIA.
38 35008150 12/2018

Instalación del software
5 Haga doble clic en el slot de la tarjeta PCMCIA para ver la ventana de configuración de la tarjeta PCMCIA.Resultado:
Paso Acción
35008150 12/2018 39
Instalación del software
Pantalla de configuración de la tarjeta PCMCIA TSX CPP 110
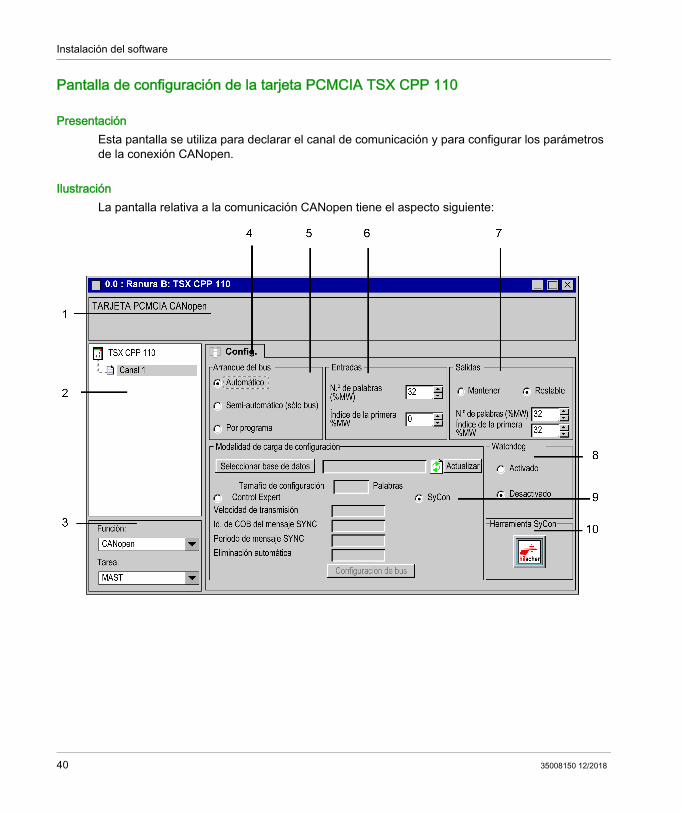
PresentaciónEsta pantalla se utiliza para declarar el canal de comunicación y para configurar los parámetros de la conexión CANopen.
IlustraciónLa pantalla relativa a la comunicación CANopen tiene el aspecto siguiente:
40 35008150 12/2018

Instalación del software
Elementos y funcionesEn la tabla siguiente se describen las distintas áreas que constituyen la pantalla de configuración:
Zona Número FunciónMódulo 1 Este campo comprende el título abreviado de la tarjeta PCMCIA. Canal 2 Esta zona permite seleccionar el canal de comunicación que se va
a configurar.Haga clic en el número de tarjeta para mostrar las fichas: Descripción, que muestra las características de la tarjeta de
comunicación. Objetos de E/S (véase EcoStruxure™ Control Expert,
Modalidades de funcionamiento), que se utiliza para presimbolizar los objetos de entrada/salida.
Fallo, que muestra los fallos de la tarjeta (solamente accesible en modalidad online).
Parámetros generales
3 Esta zona se compone de lo siguiente: La opción de función de comunicación, en este caso CANopen. Una lista desplegable que permite asociar el bus CANopen con
una tarea de la aplicación.Esta lista desplegable está formada por tres opciones que definen la velocidad de actualización de las áreas de almacenamiento asociadas con la E/S: MAST: velocidad de tarea MAST FAST: velocidad de tarea FAST
Ficha 4 La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, se trata de la pantalla de configuración.
35008150 12/2018 41
Instalación del software
Config. 5 Esta zona permite seleccionar el comportamiento del bus en el arranque.
6 Esta zona permite configurar la dirección (memoria interna del PLC) en la que se copiarán periódicamente las entradas de los dispositivos CANopen.
7 Esta zona permite configurar la modalidad de retorno de las salidas de los dispositivos del bus, así como la dirección (memoria interna del PLC) en la que se leerán periódicamente las salidas de los dispositivos CANopen.
8 Esta zona permite activar o desactivar el watchdog del bus CANopen. El watchdog está activado de forma predeterminada. Se pone en funcionamiento cuando la tarjeta PCMCIA no puede gestionar correctamente el bus. Cuando se pone en funcionamiento, las salidas de los esclavos pasan a cero.
9 Esta zona se utiliza para configurar el bus: Selección del archivo de configuración de SyCon (*.CO)
(véase página 51) Configuración de Control Expert o Sycon (véase página 46)
NOTA: No seleccione el botón de opción SyCon, pues esta opción ya no está disponible. Seleccione solamente el botón Control Expert.
10 Este botón permite iniciar el software SyCon, si está instalado en el equipo.
ADVERTENCIACOMPORTAMIENTO INESPERADO DE LA APLICACIÓNAntes de desactivar el watchdog, asegúrese de que, si la tarjeta PCMCIA no gestiona el bus CANopen, el comportamiento de los dispositivos siga siendo aceptable.El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Zona Número Función
42 35008150 12/2018
Instalación del software
Descripción de los datos de E/S y del comportamiento del bus al inicio
PresentaciónLa pantalla de configuración permite configurar el comportamiento del bus al arrancar, así como las entradas y salidas de los dispositivos esclavos en el bus.
Arranque del busEn esta figura se muestra el área de configuración del arranque del bus.
El arranque del bus se puede realizar de tres maneras: Automático: La configuración del bus, la gestión de la comunicación y la actualización de las
E/S esclavas se activan durante el arranque, sin intervención de la aplicación. Semi-automático (sólo bus): La configuración del bus y la gestión de la comunicación se activan
durante el arranque, pero la aplicación debe confirmar la gestión de las E/S mediante los objetos de lenguaje (véase página 102) correspondientes.
Por programa: La aplicación debe gestionar enteramente el arranque del bus mediante los objetos de lenguaje (véase página 102) correspondientes.
NOTA: En la modalidad Automático y Semiautomático, si la opción "Detener el bus cuando el watchdog está activado", está activada, en caso de fallo deberá realizar un inicio en frío de la aplicación PLC con el fin de reiniciar el bus CANopen.NOTA: Siempre que está configurada la modalidad de arranque, la opción "Detener el bus cuando el watchdog está activado" detiene el bus cuando desaparece un esclavo. Si se produce un fallo en un esclavo antes de que se inicie el bus, el arranque se realiza de todas formas.
35008150 12/2018 43

Instalación del software
EntradasEn esta figura se ilustra el área de configuración de entrada.
Para configurar las entradas de los esclavos en el bus, es necesario indicar el área de memoria en la que se copiarán de forma periódica. Para definir esta área, debe indicar: Un número de palabras: Se trata del número de palabras de entrada correspondientes al
tamaño de los datos de entrada configurados mediante el software Sycon. Dirección del primer %MW: Es la dirección de la primera palabra en el área de memoria de
entrada.NOTA: Las palabras %MW contienen los valores de entrada de los esclavos en el bus. Cuando se elige la modalidad de carga de Control Expert, es posible reconocer las palabras asociadas con los esclavos pulsando el botón Configuración de bus de la pantalla de configuración. En la modalidad de carga Sycon, sólo el software Sycon permite reconocer los esclavos asociados con las palabras %MW. La aplicación utiliza directamente estas palabras %MW como entradas.
NOTA: Al igual que sucede en el bus Fipio, si se utiliza la palabra %SW8 (el bit %SW8.0 está establecido en 1 para la tarea maestra y el bit %SW8.1 está establecido en 1 para la tarea rápida), la fase de adquisición de entrada de los dispositivos bus se inhibe. Los valores de estas entradas permanecen en el estado en que estaban antes de que el bit se configurara en 1.
44 35008150 12/2018

Instalación del software
SalidasEn esta figura se muestra el área de configuración de salida.
Para configurar las salidas, es necesario indicar, al igual que para las entradas, la tabla de palabras que contendrán el valor de las salidas del bus, y el tipo de recuperación necesaria cuando falla un esclavo: Mantener RestablecerNOTA: Las palabras %MW contienen los valores de salida de los esclavos en el bus. Cuando se elige la modalidad de carga de Control Expert, es posible reconocer las palabras asociadas con los esclavos pulsando el botón Configuración de bus de la pantalla de configuración. En la modalidad de carga Sycon, sólo el software Sycon permite reconocer los esclavos asociados con las palabras %MW. La aplicación utiliza directamente estas palabras %MW como salidas.
NOTA: Las tablas de palabras se encuentran en la memoria interna del PLC. No se permite la combinación de ninguna de estas dos áreas.NOTA: Si el número de palabras de entrada o salida es diferente al determinado en el archivo de configuración (véase página 46) (nombre de archivo *.CO), el software Control Expert así lo indica cuando se confirma la configuración.NOTA: El tamaño máximo autorizado del área de memoria reservada para las E/S depende del tipo de procesador y la tarea asociada (véase página 30).NOTA: Al igual que sucede en el bus Fipio, si se utiliza la palabra %SW9 (el bit %SW9.0 está establecido en 1 para la tarea maestra y el bit %SW9.1 está establecido en 1 para la tarea rápida), las salidas de los dispositivos del bus se mantienen en el estado en que estaban antes de que el bit se configurara en 1.
35008150 12/2018 45

Instalación del software
Cómo seleccionar la modalidad de carga de configuración
PresentaciónLa pantalla de configuración se puede utilizar para seleccionar la modalidad de carga de configuración. Las dos posibles opciones son: Carga mediante el software Control Expert. Carga mediante el software SyCon.Para cada opción, es esencial seleccionar la base de datos de configuración (véase página 51) creada con el software SyCon.
IlustraciónEn la siguiente figura se muestra el área de la pantalla de configuración utilizada para seleccionar la modalidad de carga de configuración.
46 35008150 12/2018
Instalación del software
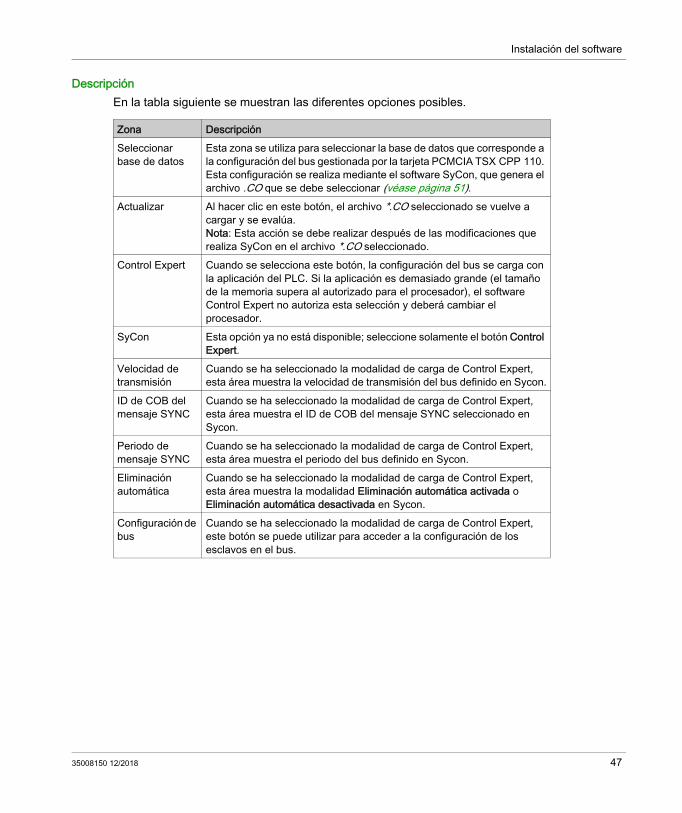
DescripciónEn la tabla siguiente se muestran las diferentes opciones posibles.
Zona DescripciónSeleccionar base de datos
Esta zona se utiliza para seleccionar la base de datos que corresponde a la configuración del bus gestionada por la tarjeta PCMCIA TSX CPP 110. Esta configuración se realiza mediante el software SyCon, que genera el archivo .CO que se debe seleccionar (véase página 51).
Actualizar Al hacer clic en este botón, el archivo *.CO seleccionado se vuelve a cargar y se evalúa.Nota: Esta acción se debe realizar después de las modificaciones que realiza SyCon en el archivo *.CO seleccionado.
Control Expert Cuando se selecciona este botón, la configuración del bus se carga con la aplicación del PLC. Si la aplicación es demasiado grande (el tamaño de la memoria supera al autorizado para el procesador), el software Control Expert no autoriza esta selección y deberá cambiar el procesador.
SyCon Esta opción ya no está disponible; seleccione solamente el botón Control Expert.
Velocidad de transmisión
Cuando se ha seleccionado la modalidad de carga de Control Expert, esta área muestra la velocidad de transmisión del bus definido en Sycon.
ID de COB del mensaje SYNC
Cuando se ha seleccionado la modalidad de carga de Control Expert, esta área muestra el ID de COB del mensaje SYNC seleccionado en Sycon.
Periodo de mensaje SYNC
Cuando se ha seleccionado la modalidad de carga de Control Expert, esta área muestra el periodo del bus definido en Sycon.
Eliminación automática
Cuando se ha seleccionado la modalidad de carga de Control Expert, esta área muestra la modalidad Eliminación automática activada o Eliminación automática desactivada en Sycon.
Configuración de bus
Cuando se ha seleccionado la modalidad de carga de Control Expert, este botón se puede utilizar para acceder a la configuración de los esclavos en el bus.
35008150 12/2018 47

Instalación del software
Carga de configuración mediante X-Way
GeneralCuando Sycon configura el bus CANopen en modalidad de carga, es posible descargar la configuración de la tarjeta TSX CPP 110 gracias al controlador X-Way.Esta descarga puede realizarse a través de una red Ethernet o simplemente en un bus Uni-Telway.NOTA: PRESTE ATENCIÓN y ponga adecuadamente el PLC en modalidad de detención cuando se produzca el proceso de descarga.NOTA: Una vez validada la elección del controlador de comunicación X-Way, deberá salir del software Sycon para cambiar de controlador.
ProcedimientoEn esta tabla se describen los pasos que se deben seguir para cargar la configuración de una tarjeta CANopen gracias a los controladores de comunicación X-Way.
Paso Acción1 Conéctese al PLC, que contiene la tarjeta TSX CPP 110 mediante el software Control Expert.2 Poner el PLC en modalidad de detención.3 Iniciar el software Sycon.4 Cargar o crear la configuración deseada con ayuda del software Sycon.5 Seleccione el comando Online → Cargar.
Resultado: Aparece un mensaje que indica que, cuando se carga la configuración, la comunicación entre los esclavos se detiene.
48 35008150 12/2018

Instalación del software
6 Haga clic en Sí para indicar que está de acuerdo con esta pausa de la comunicación entre esclavos.Resultado: Aparece una ventana de selección del controlador X-Way o CIF.
7 Seleccione el controlador X-Way y luego haga clic en Aceptar.Resultado: Aparece la ventana Asignación del controlador X-Wa.
8 Seleccione el controlador necesario (Uni-Telway, XIP, etc.) en el cuadro de grupo Selección del controlador.
9 Introduzca la dirección del PLC (Red, Estación, Módulo, Bastidor) y, a continuación, haga clic en Aceptar para iniciar el proceso de carga.Resultado: Cuando la carga está en curso, una ventana indica el avance de la transferencia de datos. Cuando ha terminado la transferencia, esta ventana desaparecerá y la pantalla principal de configuración del bus ocupará su lugar.
Paso Acción
35008150 12/2018 49
Instalación del software
Pantalla de configuración de los esclavos
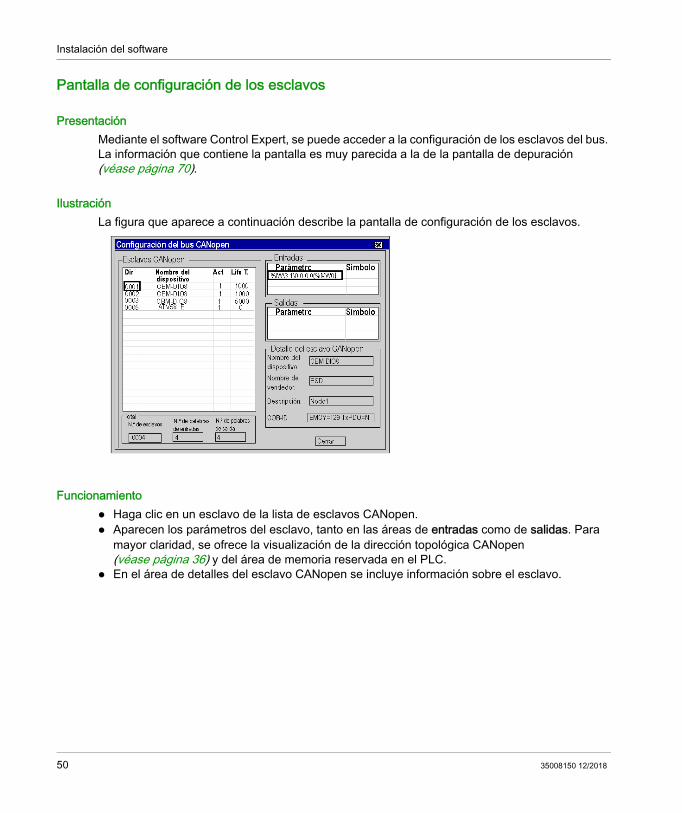
PresentaciónMediante el software Control Expert, se puede acceder a la configuración de los esclavos del bus. La información que contiene la pantalla es muy parecida a la de la pantalla de depuración (véase página 70).
IlustraciónLa figura que aparece a continuación describe la pantalla de configuración de los esclavos.
Funcionamiento Haga clic en un esclavo de la lista de esclavos CANopen. Aparecen los parámetros del esclavo, tanto en las áreas de entradas como de salidas. Para
mayor claridad, se ofrece la visualización de la dirección topológica CANopen (véase página 36) y del área de memoria reservada en el PLC.
En el área de detalles del esclavo CANopen se incluye información sobre el esclavo.
50 35008150 12/2018
Instalación del software
Cómo configurar una tarjeta PCMCIA CANopen
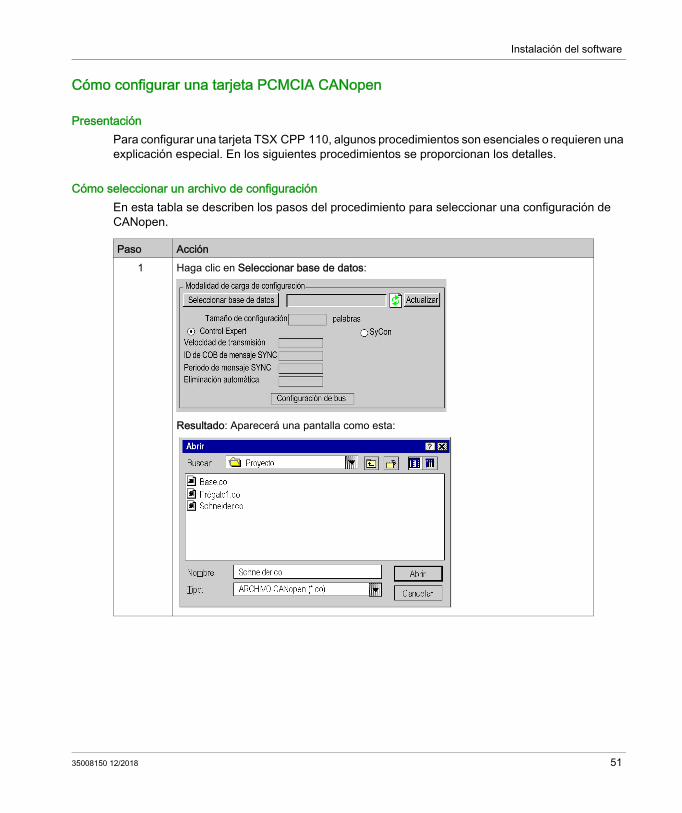
PresentaciónPara configurar una tarjeta TSX CPP 110, algunos procedimientos son esenciales o requieren una explicación especial. En los siguientes procedimientos se proporcionan los detalles.
Cómo seleccionar un archivo de configuraciónEn esta tabla se describen los pasos del procedimiento para seleccionar una configuración de CANopen.
Paso Acción1 Haga clic en Seleccionar base de datos:
Resultado: Aparecerá una pantalla como esta:
35008150 12/2018 51

Instalación del software
Procedimiento para configurar una tarjeta CANopenEn la tabla siguiente se describe el procedimiento para configurar una tarjeta PCMCIA CANopen TSX CPP 110.
2 Seleccione el archivo *.CO necesario y, a continuación, haga clic en Aceptar.Resultado: Si el número de palabras reservadas para las entradas y salidas corresponde a la configuración seleccionada, la configuración aparece en la pantalla de configuración de Control Expert.
De lo contrario, los valores incorrectos aparecen en rojo en la pantalla de configuración y no se podrá acceder a la configuración del bus hasta que se rectifiquen esos valores.Cuando el archivo .CO excede la capacidad máxima de los datos de configuración (véase página 30), aparece un mensaje de error. En este caso deberá utilizar un procesador Premium más potente.
Paso Acción
Paso Acción1 Seleccione el tipo de arranque del bus.2 Haga clic en el botón Herramienta SyCon para iniciar el software de
configuración SyCon.3 Mediante el software SyCon, configure el bus CANopen de acuerdo con los
dispositivos planificados para el bus.4 Guarde la configuración en un archivo con la extensión .CO.5 Vuelva a Control Expert.6 Seleccione un archivo de configuración (véase página 51).7 Reserve las zonas de memoria del PLC que se asociarán con las entradas y
las salidas.8 Seleccione el botón de opción Control Expert.9 Haga clic en el botón Habilitado del watchdog.
10 Confirme la configuración.Resultado: El software indica el número de palabras necesarias en las entradas y las salidas para configurar el bus seleccionado. Si los tamaños especificados no son los tamaños óptimos, puede ajustarlos.
52 35008150 12/2018
Instalación del software
Bus CANopen mostrado en el explorador de proyectos
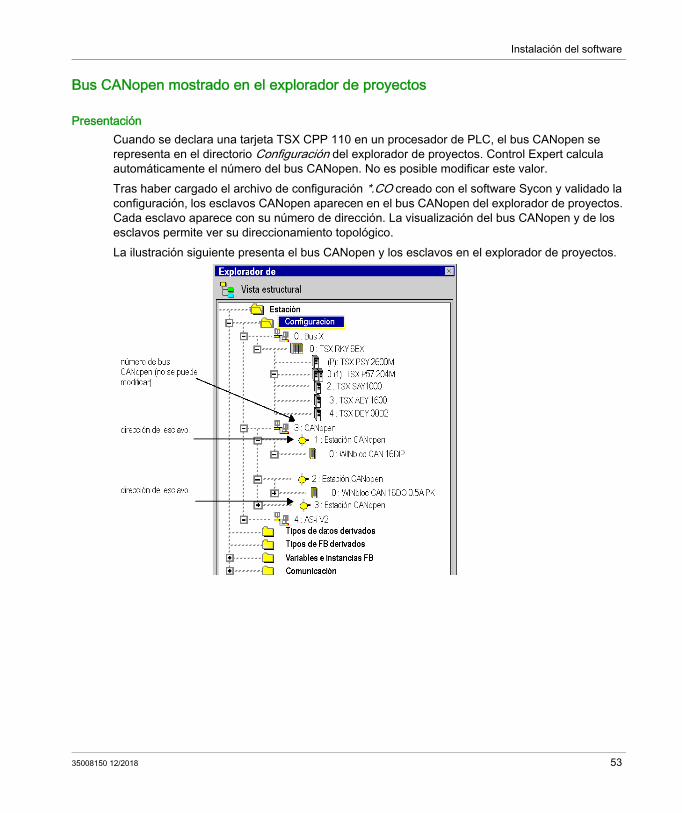
PresentaciónCuando se declara una tarjeta TSX CPP 110 en un procesador de PLC, el bus CANopen se representa en el directorio Configuración del explorador de proyectos. Control Expert calcula automáticamente el número del bus CANopen. No es posible modificar este valor.Tras haber cargado el archivo de configuración *.CO creado con el software Sycon y validado la configuración, los esclavos CANopen aparecen en el bus CANopen del explorador de proyectos. Cada esclavo aparece con su número de dirección. La visualización del bus CANopen y de los esclavos permite ver su direccionamiento topológico.La ilustración siguiente presenta el bus CANopen y los esclavos en el explorador de proyectos.
35008150 12/2018 53

Instalación del software
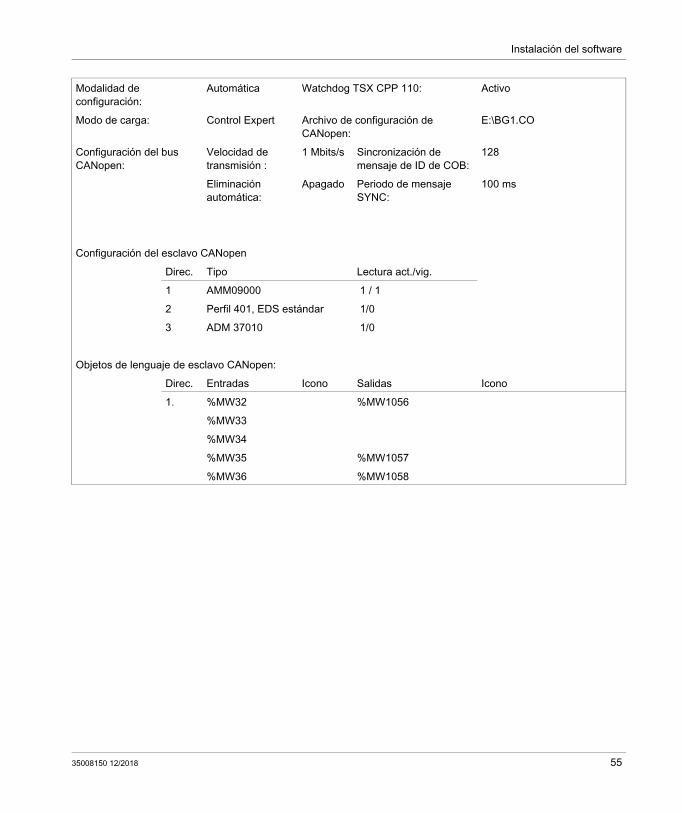
Archivo de configuración de la tarjeta PCMCIA TSX CPP 110
PresentaciónDesde el módulo de procesador, hay una carpeta en el editor de documentación en la que se describe la configuración de la aplicación para la tarjeta PCMCIA TSX CPP 110.
IlustraciónSe presenta de la manera siguiente:
TSX P57 354M [BASTIDOR 0 POSICIÓN 0]Identificación del móduloReferencia del producto: TSX P57 354M Designación: PROCESADOR TSX P57
354M Dirección: 000 Icono:
Parámetros de canal: 0Asignación de tarea/canal:
MAST
Tipo de canal: Puerto de terminal Símbolo de canalFunción específica de la aplicación:
Conexión Uni-Telway Símbolo de canal
Velocidad de transmisión 19200 bits/s Timeout: 30 msTipo de módulo: Maestro Paridad: ImparCantidad de esclavos: 8
Parámetros de canal: 1Asignación de tarea/canal:
MAST
Tipo de submódulo: TARJETA PCMCIA CANopen TSX CPP 110Tipo de canal: Puerto PCMCIA Símbolo de canalFunción específica de la aplicación:
CANopen
Entradas Dirección del primer %MW 32 Longitud: 424Salidas Dirección del primer %MW 1056 Longitud: 102
Estrategia de recuperación de salida: poner a cero
54 35008150 12/2018
Instalación del software
Modalidad de configuración:
Automática Watchdog TSX CPP 110: Activo
Modo de carga: Control Expert Archivo de configuración de CANopen:
E:\BG1.CO
Configuración del bus CANopen:
Velocidad de transmisión :
1 Mbits/s Sincronización de mensaje de ID de COB:
128
Eliminación automática:
Apagado Periodo de mensaje SYNC:
100 ms
Configuración del esclavo CANopen Direc. Tipo Lectura act./vig.1 AMM09000 1 / 12 Perfil 401, EDS estándar 1/03 ADM 37010 1/0
Objetos de lenguaje de esclavo CANopen:Direc. Entradas Icono Salidas Icono1. %MW32 %MW1056
%MW33%MW34%MW35 %MW1057%MW36 %MW1058
35008150 12/2018 55
Instalación del software
Programación
Sección 3.3Programación
Finalidad de esta secciónEn esta sección se describen las herramientas disponibles para programar el funcionamiento y obtener información de un bus CANcontrolado por una tarjeta PCMCIA TSX CPP 110.Es posible programar el funcionamiento del bus CANopen mediante solicitudes UNI-TE: Enviar y recibir mensajes SDO en el bus, Acceder al nivel de vínculo mediante el envío de PDU.También es posible supervisar el bus y su funcionamiento: Identificación del maestro, Enviar solicitudes de diagnóstico en dispositivos busEstas solicitudes se envían al maestro CANopen (tarjeta PCMCIA TSX CPP 110) que se va a procesar.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaAcceso a los SDO de CANopen 57Solicitud de IDENTIFICACIÓN 65Comando Diagnóstico 68
56 35008150 12/2018

Instalación del software
Acceso a los SDO de CANopen
PresentaciónLas funciones de comunicación READ_VAR (véase EcoStruxure™ Control Expert, Comunicación, Biblioteca de bloques) y WRITE_VAR (véase EcoStruxure™ Control Expert, Comunicación, Biblioteca de bloques) se utilizan para acceder a la transferencia de datos abiertos del tipo SDO de CAN. Los parámetros de estas funciones determinan la acción realizada.Estos servicios se basan en la gestión de mensajes estandarizados CMS del estándar CANopen. Para obtener información sobre los formatos SDO utilizados, consulte la documentación de los esclavos CANopen.
Si se envían y reciben SDO simultáneamente, puede que no se procesen los siguientes SDO. Si se da el caso, debe realizar un reinicio en frío mediante el botón RESET del procesador para reiniciar la aplicación y volver a la modalidad de funcionamiento normal.
ATENCIÓNCOMPORTAMIENTO INESPERADO DE LA APLICACIÓNNo envíe ni reciba SDO simultáneamente.El incumplimiento de estas instrucciones puede causar lesiones o daño al equipo.
35008150 12/2018 57
Instalación del software
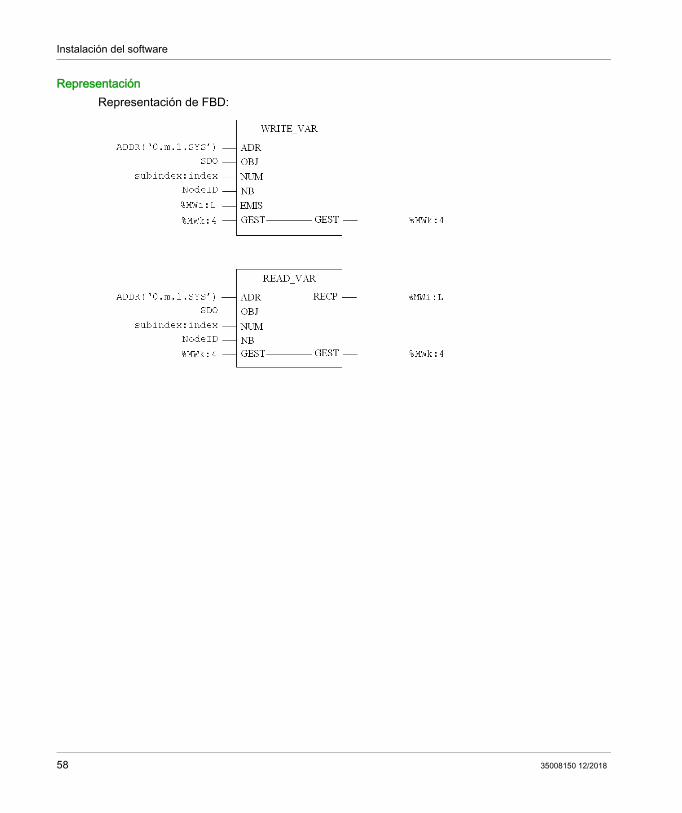
RepresentaciónRepresentación de FBD:
58 35008150 12/2018

Instalación del software
Representación de LD:
35008150 12/2018 59

Instalación del software
Representación de ST:La sintaxis de la función de comunicación es la siguiente:WRITE_VAR(ADDR('0.m.1.SYS'), 'SDO', index:subindex, NodeID, %MWi:L, %MWk:4)
READ_VAR(ADDR('0.m.1.SYS'), 'SDO', index:subindex, NodeID, %MWk:4, %MWi:L)
Descripción de parámetros de la función WRITE_VARLa sintaxis de la función de comunicación es la siguiente:En la tabla siguiente se describen los distintos parámetros de la función.
Parámetro DescripciónADDR('0.m.1.SYS') Dirección de la entidad de destino de intercambio:
m: slot del procesador en el bastidor (0 o 1) 1: canal (siempre 1) SYS: servidor UNI-TE de la tarjeta PCMCIA
'SDO' Tipo de objeto SDO (siempre SDO en mayúsculas)subindex:index Palabra doble o valor inmediato que identifica el índice o subíndice
de SDO de CANopen:La palabra más significativa que crea la palabra doble contiene el subíndice, y la palabra menos significativa contiene el índice.Ejemplo: si utiliza la palabra doble %MD0: %MW0: contiene el índice %MW1: contiene el subíndice
NodeID Palabra o valor que identifica el dispositivo de destino en el bus CANopen
%MWi:L Tabla de palabras que contiene los datos que van a enviarse (longitud mínima = 1)
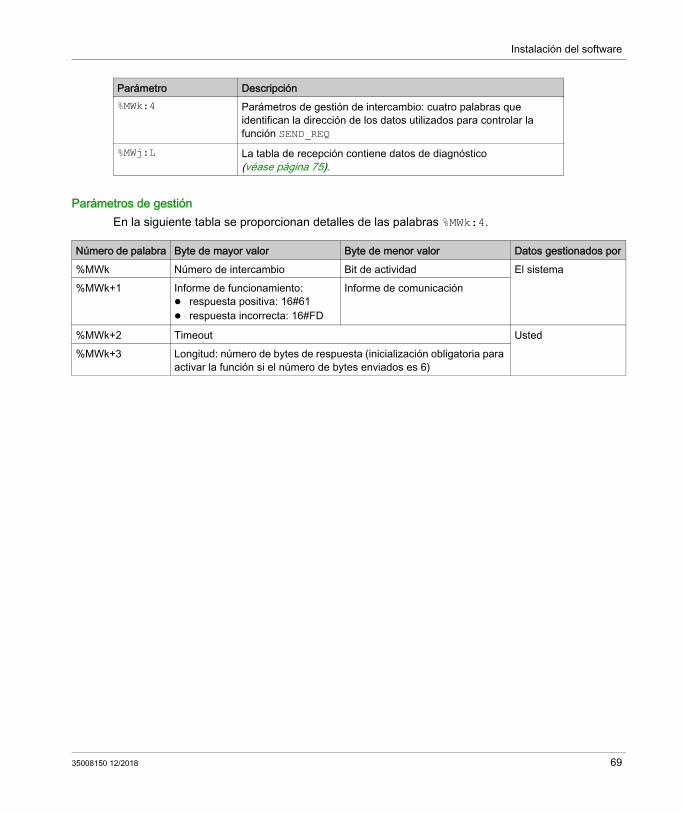
%MWk:4 Parámetros de gestión de intercambio: cuatro palabras que identifican la dirección de los datos utilizados para controlar la función WRITE_VAR
60 35008150 12/2018

Instalación del software
Descripción de parámetros de la función READ_VARLa sintaxis de la función de comunicación es la siguiente:En la tabla siguiente se describen los distintos parámetros de la función.
Parámetro DescripciónADDR('0.m.1.SYS') Dirección de la entidad de destino de intercambio:
m: slot del procesador en el bastidor (0 o 1) 1: canal (siempre 1) SYS: servidor UNI-TE de la tarjeta PCMCIA
'SDO' Tipo de objeto SDO (siempre SDO en mayúsculas)subindex:index Palabra doble o valor inmediato que identifica el índice o subíndice
de SDO de CANopen:La palabra más significativa que crea la palabra doble contiene el subíndice, y la palabra menos significativa contiene el índice.Ejemplo: si utiliza la palabra doble %MD0: %MW0: contiene el índice %MW1: contiene el subíndice
NodeID Palabra o valor que identifica el dispositivo de destino en el bus CANopen
%MWk:4 Parámetros de gestión de intercambio: cuatro palabras que identifican la dirección de los datos utilizados para controlar la función READ_VAR
%MWi:L Tabla de palabras que contiene los datos que se recibirán (longitud mínima = 1)
35008150 12/2018 61
Instalación del software
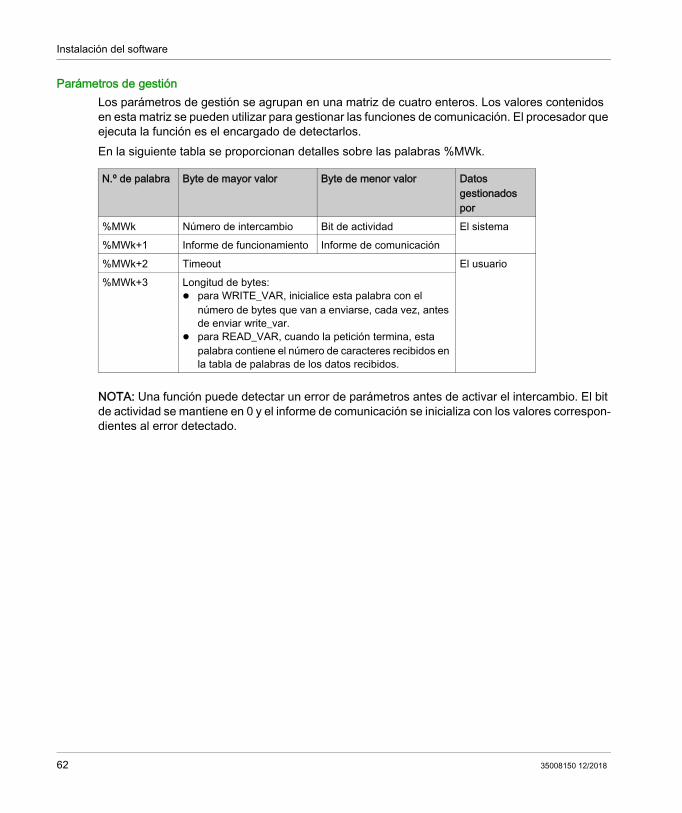
Parámetros de gestiónLos parámetros de gestión se agrupan en una matriz de cuatro enteros. Los valores contenidos en esta matriz se pueden utilizar para gestionar las funciones de comunicación. El procesador que ejecuta la función es el encargado de detectarlos.En la siguiente tabla se proporcionan detalles sobre las palabras %MWk.
NOTA: Una función puede detectar un error de parámetros antes de activar el intercambio. El bit de actividad se mantiene en 0 y el informe de comunicación se inicializa con los valores correspon-dientes al error detectado.
N.º de palabra Byte de mayor valor Byte de menor valor Datos gestionados por
%MWk Número de intercambio Bit de actividad El sistema%MWk+1 Informe de funcionamiento Informe de comunicación%MWk+2 Timeout El usuario%MWk+3 Longitud de bytes:
para WRITE_VAR, inicialice esta palabra con el número de bytes que van a enviarse, cada vez, antes de enviar write_var.
para READ_VAR, cuando la petición termina, esta palabra contiene el número de caracteres recibidos en la tabla de palabras de los datos recibidos.
62 35008150 12/2018
Instalación del software
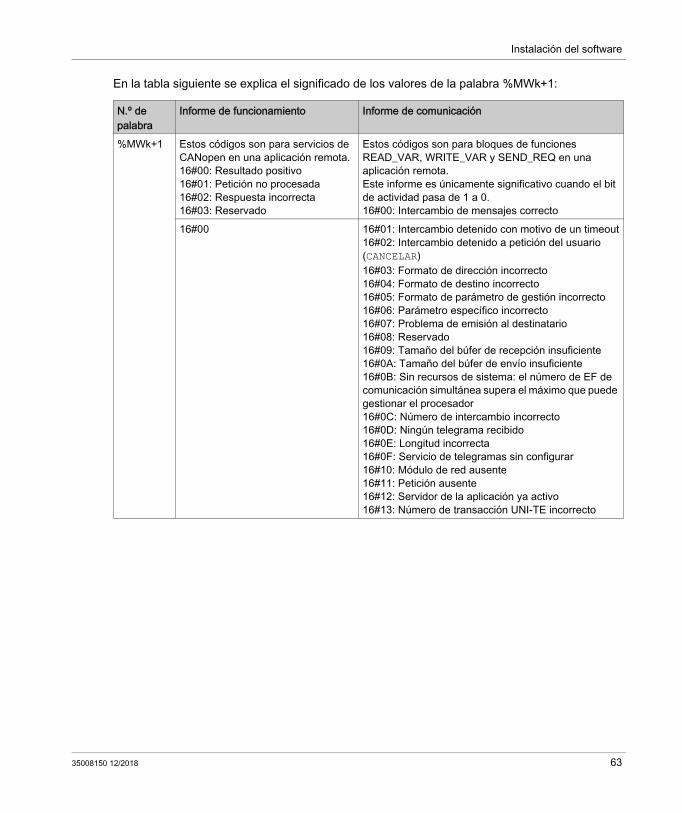
En la tabla siguiente se explica el significado de los valores de la palabra %MWk+1:
N.º de palabra
Informe de funcionamiento Informe de comunicación
%MWk+1 Estos códigos son para servicios de CANopen en una aplicación remota.16#00: Resultado positivo16#01: Petición no procesada16#02: Respuesta incorrecta16#03: Reservado
Estos códigos son para bloques de funciones READ_VAR, WRITE_VAR y SEND_REQ en una aplicación remota.Este informe es únicamente significativo cuando el bit de actividad pasa de 1 a 0.16#00: Intercambio de mensajes correcto
16#00 16#01: Intercambio detenido con motivo de un timeout16#02: Intercambio detenido a petición del usuario (CANCELAR)16#03: Formato de dirección incorrecto16#04: Formato de destino incorrecto16#05: Formato de parámetro de gestión incorrecto16#06: Parámetro específico incorrecto16#07: Problema de emisión al destinatario16#08: Reservado16#09: Tamaño del búfer de recepción insuficiente16#0A: Tamaño del búfer de envío insuficiente16#0B: Sin recursos de sistema: el número de EF de comunicación simultánea supera el máximo que puede gestionar el procesador16#0C: Número de intercambio incorrecto16#0D: Ningún telegrama recibido16#0E: Longitud incorrecta16#0F: Servicio de telegramas sin configurar16#10: Módulo de red ausente16#11: Petición ausente16#12: Servidor de la aplicación ya activo16#13: Número de transacción UNI-TE incorrecto
35008150 12/2018 63
Instalación del software
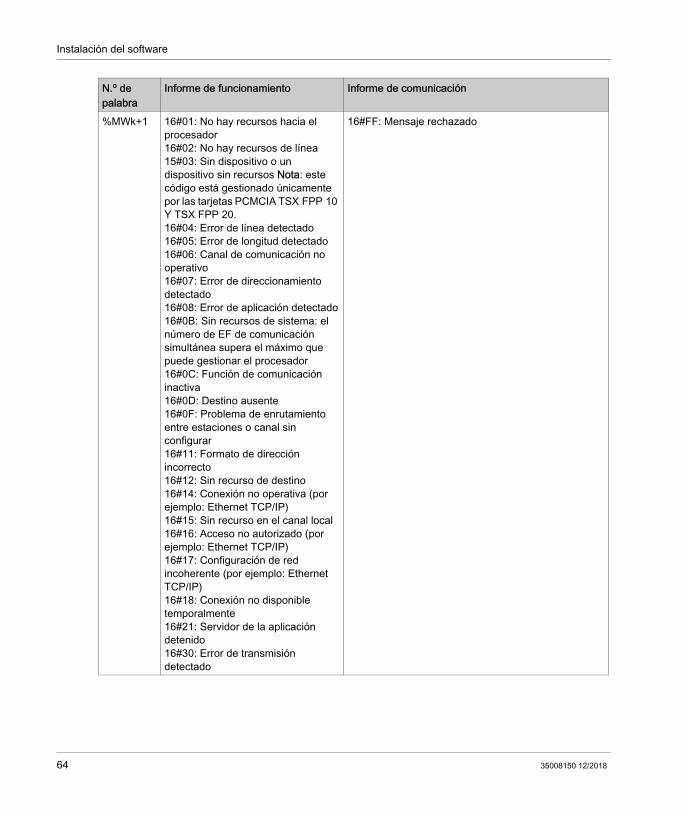
%MWk+1 16#01: No hay recursos hacia el procesador16#02: No hay recursos de línea15#03: Sin dispositivo o un dispositivo sin recursos Nota: este código está gestionado únicamente por las tarjetas PCMCIA TSX FPP 10 Y TSX FPP 20.16#04: Error de línea detectado16#05: Error de longitud detectado16#06: Canal de comunicación no operativo16#07: Error de direccionamiento detectado16#08: Error de aplicación detectado16#0B: Sin recursos de sistema: el número de EF de comunicación simultánea supera el máximo que puede gestionar el procesador16#0C: Función de comunicación inactiva16#0D: Destino ausente16#0F: Problema de enrutamiento entre estaciones o canal sin configurar16#11: Formato de dirección incorrecto16#12: Sin recurso de destino16#14: Conexión no operativa (por ejemplo: Ethernet TCP/IP)16#15: Sin recurso en el canal local16#16: Acceso no autorizado (por ejemplo: Ethernet TCP/IP)16#17: Configuración de red incoherente (por ejemplo: Ethernet TCP/IP)16#18: Conexión no disponible temporalmente16#21: Servidor de la aplicación detenido16#30: Error de transmisión detectado
16#FF: Mensaje rechazado
N.º de palabra
Informe de funcionamiento Informe de comunicación
64 35008150 12/2018
Instalación del software
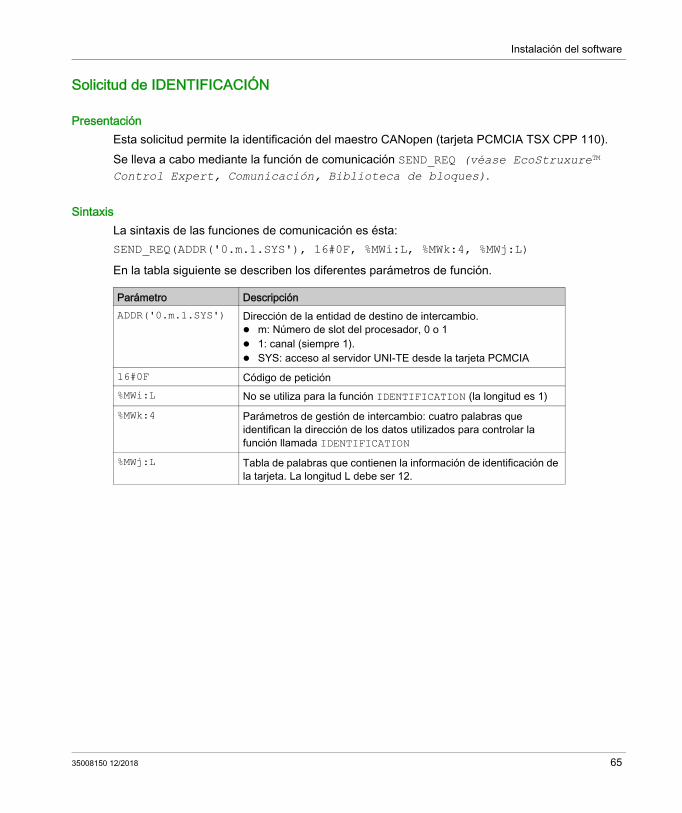
Solicitud de IDENTIFICACIÓN
PresentaciónEsta solicitud permite la identificación del maestro CANopen (tarjeta PCMCIA TSX CPP 110).Se lleva a cabo mediante la función de comunicación SEND_REQ (véase EcoStruxure™ Control Expert, Comunicación, Biblioteca de bloques).
SintaxisLa sintaxis de las funciones de comunicación es ésta:SEND_REQ(ADDR('0.m.1.SYS'), 16#0F, %MWi:L, %MWk:4, %MWj:L)
En la tabla siguiente se describen los diferentes parámetros de función.
Parámetro DescripciónADDR('0.m.1.SYS') Dirección de la entidad de destino de intercambio.
m: Número de slot del procesador, 0 o 1 1: canal (siempre 1). SYS: acceso al servidor UNI-TE desde la tarjeta PCMCIA
16#0F Código de petición%MWi:L No se utiliza para la función IDENTIFICATION (la longitud es 1)%MWk:4 Parámetros de gestión de intercambio: cuatro palabras que
identifican la dirección de los datos utilizados para controlar la función llamada IDENTIFICATION
%MWj:L Tabla de palabras que contienen la información de identificación de la tarjeta. La longitud L debe ser 12.
35008150 12/2018 65
Instalación del software
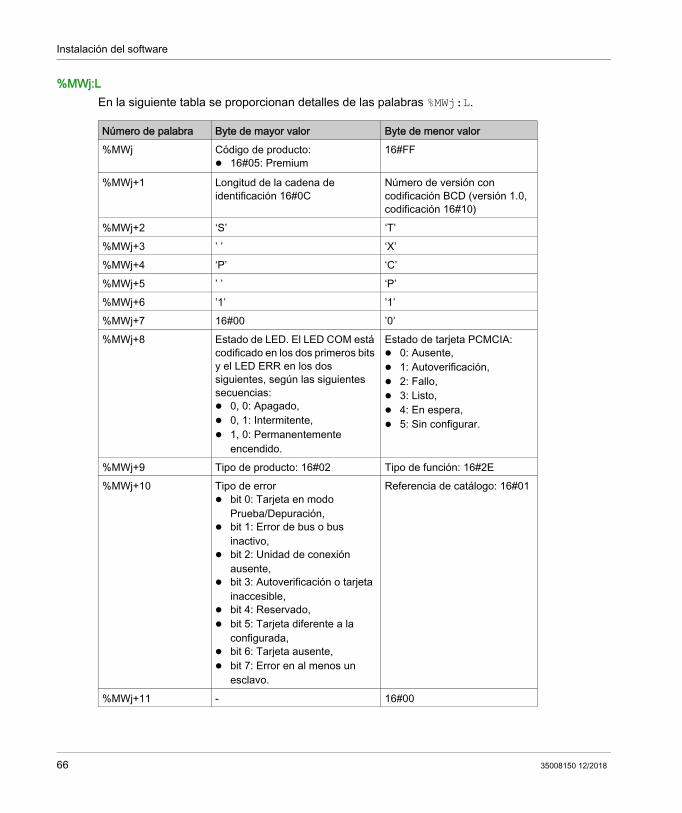
%MWj:LEn la siguiente tabla se proporcionan detalles de las palabras %MWj:L.
Número de palabra Byte de mayor valor Byte de menor valor%MWj Código de producto:
16#05: Premium16#FF
%MWj+1 Longitud de la cadena de identificación 16#0C
Número de versión con codificación BCD (versión 1.0, codificación 16#10)
%MWj+2 ‘S’ ‘T’%MWj+3 ’ ’ ‘X’%MWj+4 ‘P’ ‘C’%MWj+5 ’ ’ ‘P’%MWj+6 ’1’ ’1’%MWj+7 16#00 ’0’%MWj+8 Estado de LED. El LED COM está
codificado en los dos primeros bits y el LED ERR en los dos siguientes, según las siguientes secuencias: 0, 0: Apagado, 0, 1: Intermitente, 1, 0: Permanentemente
encendido.
Estado de tarjeta PCMCIA: 0: Ausente, 1: Autoverificación, 2: Fallo, 3: Listo, 4: En espera, 5: Sin configurar.
%MWj+9 Tipo de producto: 16#02 Tipo de función: 16#2E%MWj+10 Tipo de error
bit 0: Tarjeta en modo Prueba/Depuración,
bit 1: Error de bus o bus inactivo,
bit 2: Unidad de conexión ausente,
bit 3: Autoverificación o tarjeta inaccesible,
bit 4: Reservado, bit 5: Tarjeta diferente a la
configurada, bit 6: Tarjeta ausente, bit 7: Error en al menos un
esclavo.
Referencia de catálogo: 16#01
%MWj+11 - 16#00
66 35008150 12/2018

Instalación del software
Parámetros de gestiónEn la siguiente tabla se proporcionan detalles de las palabras %MWk:4.
Número de palabra Byte de mayor valor Byte de menor valor Datos gestionados por%MWk Número de intercambio Bit de actividad El sistema%MWk+1 Informe de funcionamiento,
informe de 16#3F positivoInforme de comunicación
%MWk+2 Timeout Usted%MWk+3 Longitud: la inicialización a 0 es obligatoria antes de que se envíe la
función
35008150 12/2018 67

Instalación del software
Comando Diagnóstico
PresentaciónLos comandos de diagnóstico se envían mediante el bloque de función SEND_REQ (véase EcoStruxure™ Control Expert, Comunicación, Biblioteca de bloques). En este caso, la función SEND_REQ se utiliza para:
Obtener diagnósticos de los esclavos del bus, Obtener la versión de una tarjeta PCMCIA CAN open, Obtener variables de estado, Obtener el historial de errores del bus.
SintaxisLa sintaxis de la función de comunicación es la siguiente:SEND_REQ (ADDR('0.m.1.SYS', 16#0031, %MWi:3, %Mwk:4, %MWj:L)
En la tabla siguiente se describen los diferentes parámetros de función.
Parámetro DescripciónADDR('0.m.1.SYS') Dirección de la entidad de destino de intercambio.
m: ranura del procesador en el bastidor (0 ó 1). 1: canal (siempre 1). SYS: servidor UNI-TE de la tarjeta PCMCIA.
16#0031 Código de petición%MWi:3 Parámetros de la solicitud:
%MWi: tipo de objeto de diagnóstico: 1 ... 127: Diagnósticos de esclavos 1 a 127 128: Versión de tarjeta CANopen 129: Estado de la tarjeta CANopen, la respuesta es
equivalente al contenido de las palabras de estado %IW0.m.1.i (véase página 99).
130: Historial de errores de mensajes
%MWi+1: Dirección inicial en la tabla de diagnóstico (valor predeterminado 0). Para permitir el acceso parcial a la tabla de diagnósticos, especifique una palabra inicial en la tabla (Iniciar offset)
%MWi+2: Longitud en bytes de los diagnósticos que se van a leer, que es, generalmente, dos veces la longitud de la tabla de respuestas
68 35008150 12/2018
Instalación del software
Parámetros de gestiónEn la siguiente tabla se proporcionan detalles de las palabras %MWk:4.
%MWk:4 Parámetros de gestión de intercambio: cuatro palabras que identifican la dirección de los datos utilizados para controlar la función SEND_REQ
%MWj:L La tabla de recepción contiene datos de diagnóstico (véase página 75).
Parámetro Descripción
Número de palabra Byte de mayor valor Byte de menor valor Datos gestionados por%MWk Número de intercambio Bit de actividad El sistema%MWk+1 Informe de funcionamiento:
respuesta positiva: 16#61 respuesta incorrecta: 16#FD
Informe de comunicación
%MWk+2 Timeout Usted%MWk+3 Longitud: número de bytes de respuesta (inicialización obligatoria para
activar la función si el número de bytes enviados es 6)
35008150 12/2018 69
Instalación del software
Depurar
Sección 3.4Depurar
Descripción de la pantalla Depuración
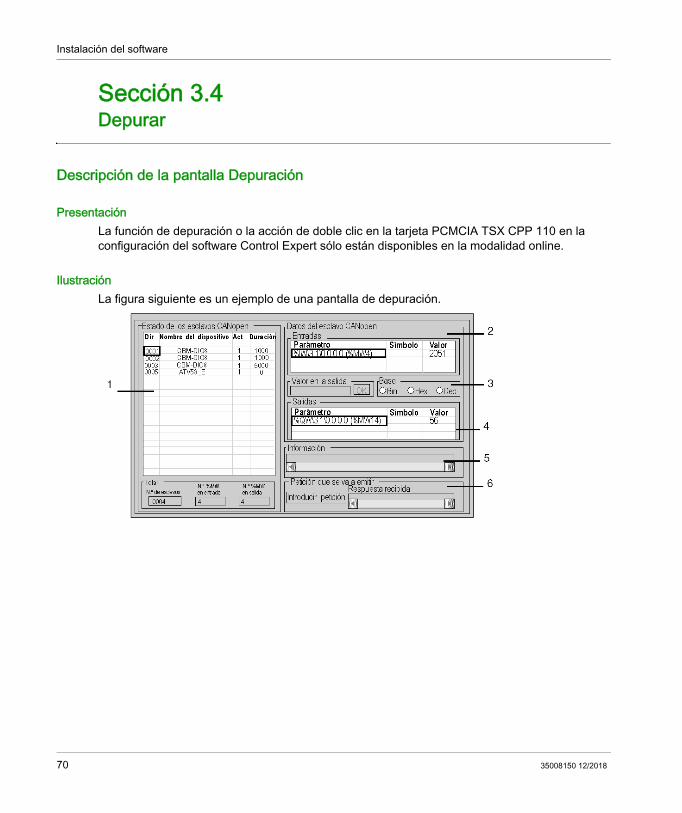
PresentaciónLa función de depuración o la acción de doble clic en la tarjeta PCMCIA TSX CPP 110 en la configuración del software Control Expert sólo están disponibles en la modalidad online.
IlustraciónLa figura siguiente es un ejemplo de una pantalla de depuración.
70 35008150 12/2018

Instalación del software
DescripciónEn la tabla siguiente se presentan las distintas áreas de la pantalla de depuración:
Número Elemento Función1 Estado de los
esclavos CANopen
Esta área muestra todos los esclavos del bus CANopen. Un esclavo defectuoso se muestra en rojo. Cuando el fallo desaparece, se muestra en color azul. En caso contrario, aparece en negro. La selección de un esclavo actualiza las áreas 2, 4 y 5.Act.: Indica si se ha activado el esclavo en la configuración Sycon (1 activado, 0 desactivado)T. de vida: Tiempo de vida.
2 Entradas Cuando se selecciona un esclavo, esta área contiene la lista de palabras que se le asocian en la entrada.Para mayor claridad, se ofrece la visualización de la dirección topológica CANopen (véase página 36) (%IW\3.1\0.0.0.0) y del área de memoria reservada en el PLC (%MW4).
3 Valor de salida Cuando se selecciona una palabra de salida en el área 4, se puede modificar su valor introduciendo uno nuevo y haciendo clic en el botón Aceptar.
4 Salidas Cuando se selecciona un esclavo, esta área contiene la lista de palabras que se le asocian en la salida.Para mayor claridad, se ofrece la visualización de la dirección topológica CANopen (véase página 36) (%QW\3.1\0.0.0.0) y del área de memoria reservada en el PLC (%MW14).
5 Información acerca de
Cuando se selecciona un esclavo (al hacer clic en el área 1), esta área contiene el último mensaje de diagnóstico y, para obtener información sobre la tarjeta TSX CPP 110, basta con hacer clic en el encabezado de la tabla.
6 Petición que se va a emitir
Esta área permite emitir una petición SDO. La sintaxis de los parámetros es igual a la que se utiliza para llevar a cabo las transferencias SDO mediante las peticiones READ_VAR y WRITE_VAR (véase página 57). Al pulsar el botón Introducir petición aparecen los campos de introducción de la petición.
35008150 12/2018 71

Instalación del software
Diagnósticos
Sección 3.5Diagnósticos
Finalidad de esta secciónEn esta sección se describen las herramientas de diagnóstico de equipo y software disponibles para la tarjeta PCMCIA TSX CPP 110.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaDiagnósticos mediante los LED de estado de la tarjeta PCMCIA TSX CPP 110 73Datos de diagnóstico 75Realización de un diagnóstico 78
72 35008150 12/2018

Instalación del software
Diagnósticos mediante los LED de estado de la tarjeta PCMCIA TSX CPP 110
PresentaciónLos LED de la tarjeta permiten ver el estado de la tarjeta y del bus CANopen. Durante el funciona-miento normal, el LED ERR está apagado, mientras que el LED COM está encendido de forma permanente.
IlustraciónEn la siguiente figura se indica la posición de los dos LED, ERR y COM.
35008150 12/2018 73

Instalación del software
DiagnósticoSegún el estado de los LED, los diagnósticos son los siguientes:
LED de pantalla de estado SignificadoERR (rojo) COM
(amarillo)Apagado Apagado La tarjeta no recibe alimentación o transferencia de configuración
en cursoIntermitente(Irregular)
No hay configuración en la tarjeta
Intermitente(Regular)
Tarjeta configurada y lista, pero no está activa o sin firmware CANopen
Encendido Bus configurado y activo, sin errorPermanentemente encendido
Apagado Error detectado, controlador de bus detenidoIntermitente Tarjeta configurada y lista, pero sin posibilidad de comunicarse con
un dispositivo periférico remoto (por ejemplo, cable de bus CAN desconectado), o todos los dispositivos periféricos configurados informan de un error.Error en tarjeta, error de configuración o error de sincronización entre la tarjeta y el PLC (para obtener más información, consulte los datos de diagnóstico de estado del módulo)
Encendido Bus configurado y activo, al menos un suscriptor de bus indica un error o no es posible establecer contacto con él
74 35008150 12/2018

Instalación del software
Datos de diagnóstico
PresentaciónDurante los diagnósticos, los primeros datos que se utilizan son palabras de intercambio implícito %IW (véase página 99).En otras secciones existen datos de diagnóstico que se pueden consultar escribiendo algunas líneas de programación en el PLC.La función de comunicación SEND_REQ permite que se lleven a cabo los diagnósticos (véase página 68): En el esclavo de su elección (1 a 127, una solicitud por esclavo), En la versión de la tarjeta PCMCIA (128), En el estado de la tarjeta (129),Y se utiliza para obtener el historial de mensajes de error (130).NOTA: El código 129 permite la recepción de la misma información que la contenida en las palabras de entrada de intercambio implícito (véase página 100).La información proporcionada proviene de la tarjeta PCMCIA y se actualiza periódicamente.La tabla de recepción de solicitudes contiene la información descrita en los siguientes párrafos.NOTA: La información se proporciona en tablas de byte. Aunque se tiene en cuenta la posibilidad de solicitar toda, o parte de, esta tabla, es necesario prestar atención a las palabras más y menos significativas de la tabla %MWi:L.
NOTA: La información de diagnóstico cumple con el estándar CAN. Puede encontrar información de referencia en el siguiente sitio: http://www.can-cia.de.
35008150 12/2018 75

Instalación del software
Diagnósticos de esclavoEn la siguiente tabla se describe la información recibida tras una solicitud de diagnóstico en un esclavo (código 1 a 127).
Descripción de un bloque de información sobre el esclavoEn la tabla siguiente se describe un bloque de información típico.
Rango de byte Descripción0 Bits de estado de dispositivo:
Bit 0: sin respuesta Bit 1: Desborde de tabla de historial de mensajes de error Bit 2: Error de parámetros Bit 3: supervisión de dispositivo activo Bit 4 a bit 6: reservado Bit 7: Desactivado
1 y 2 Información complementaria leída durante el arranque del bus en el objeto estándar 16#1000 (estandarización CAN)
3 y 4 Número de perfil leído durante el arranque del bus en el objeto estándar 16#1000 (estandarización CAN)
5 Estado de esclavo: 1: Desconectado 2: Conexión en curso 3: En preparación 4: Listo 5: Funcionando 127: En preparación o ausente
6 Código de error (véase página 113) (código del último error generado por el esclavo)
7 Número de bloques de información urgente acerca del esclavo (0 a 5).Nota: Estos bloques se agregan al final de esta tabla. En el siguiente párrafo se proporcionan detalles de un bloque típico.
Rango de byte Descripción0 y 1 Código de error2 Valor de registro de error, objeto 16#1001 del esclavo (estandarización
CAN)3 a 6 Valor de registro del estado del fabricante específico, objeto 16#1002
(normalización CAN)7 reservado
76 35008150 12/2018

Instalación del software
Diagnósticos en una versión de tarjetaEn la siguiente tabla se describe la información recibida tras una solicitud de diagnóstico en una tarjeta PCMCIA (código 128).
Historial de errores de mensajesEn la siguiente tabla se describe la información recibida tras una solicitud de un informe histórico (código 130).
Descripción de un bloque de información sobre el informe históricoEn la tabla siguiente se describe un bloque de información típico.
Rango de byte Descripción0 a 7 Versión de firmware (cadena de caracteres)8 a 10 Fecha de creación de la versión de firmware (codificación BCD,
DD.MM.AA)11 a 13 Fecha de fabricación (codificación BCD, DD.MM.AA)14 a 17 Número de serie (codificación BCD)18 a 25 Nombre de protocolo (ASCII, sin final de cadena de caracteres, por
ejemplo: "CANopen")
Rango de byte Descripción0 y 1 Número de bloques de error
Nota: Estos bloques se agregan al final de esta tabla. En el siguiente párrafo se proporcionan detalles de un bloque típico.
2 a 49 Contenido del bloque de error (8 bloques como máximo)
Rango de byte Descripción0 Código de servicio1 IP afectado2 y 3 Código de error de mensaje (véase página 109)4 y 5 Detalle sobre código de error (véase página 112)
35008150 12/2018 77
Instalación del software
Realización de un diagnóstico
PresentaciónLa detección de un fallo en el bus CANopen se realiza en primer lugar con ayuda de los indicadores luminosos de la tarjeta PCMCIA. A continuación, puede utilizar el procedimiento siguiente, que describe la gestión del arranque del bus, así como las verificaciones que se deben llevar a cabo mediante los objetos de lenguaje (véase página 83) suministrados por el PLC.
78 35008150 12/2018

Instalación del software
ProcedimientoEl diagrama siguiente muestra las distintas fases del procedimiento.
35008150 12/2018 79
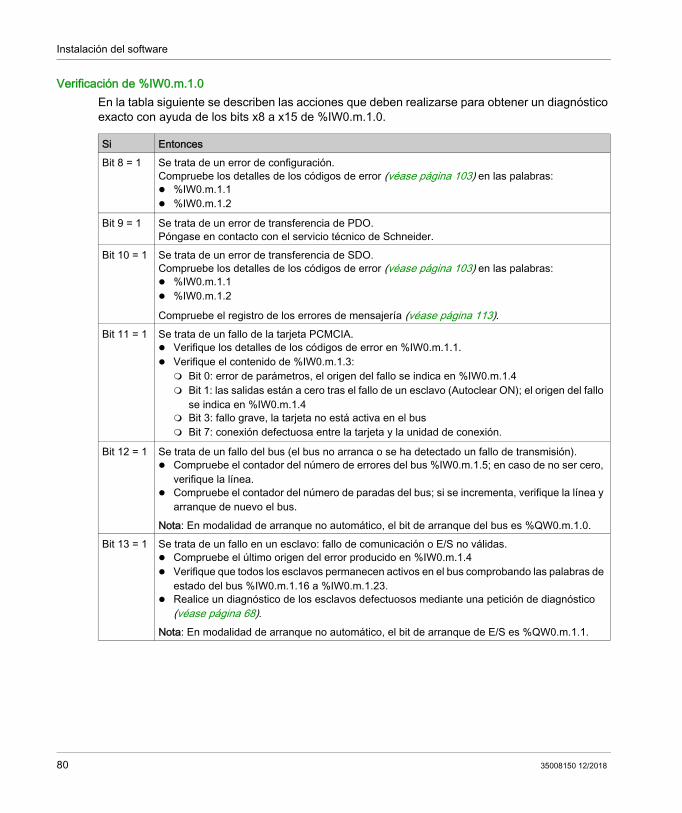
Instalación del software
Verificación de %IW0.m.1.0En la tabla siguiente se describen las acciones que deben realizarse para obtener un diagnóstico exacto con ayuda de los bits x8 a x15 de %IW0.m.1.0.
Si EntoncesBit 8 = 1 Se trata de un error de configuración.
Compruebe los detalles de los códigos de error (véase página 103) en las palabras: %IW0.m.1.1 %IW0.m.1.2
Bit 9 = 1 Se trata de un error de transferencia de PDO.Póngase en contacto con el servicio técnico de Schneider.
Bit 10 = 1 Se trata de un error de transferencia de SDO.Compruebe los detalles de los códigos de error (véase página 103) en las palabras: %IW0.m.1.1 %IW0.m.1.2
Compruebe el registro de los errores de mensajería (véase página 113).Bit 11 = 1 Se trata de un fallo de la tarjeta PCMCIA.
Verifique los detalles de los códigos de error en %IW0.m.1.1. Verifique el contenido de %IW0.m.1.3: Bit 0: error de parámetros, el origen del fallo se indica en %IW0.m.1.4 Bit 1: las salidas están a cero tras el fallo de un esclavo (Autoclear ON); el origen del fallo
se indica en %IW0.m.1.4 Bit 3: fallo grave, la tarjeta no está activa en el bus Bit 7: conexión defectuosa entre la tarjeta y la unidad de conexión.
Bit 12 = 1 Se trata de un fallo del bus (el bus no arranca o se ha detectado un fallo de transmisión). Compruebe el contador del número de errores del bus %IW0.m.1.5; en caso de no ser cero,
verifique la línea. Compruebe el contador del número de paradas del bus; si se incrementa, verifique la línea y
arranque de nuevo el bus.Nota: En modalidad de arranque no automático, el bit de arranque del bus es %QW0.m.1.0.
Bit 13 = 1 Se trata de un fallo en un esclavo: fallo de comunicación o E/S no válidas. Compruebe el último origen del error producido en %IW0.m.1.4 Verifique que todos los esclavos permanecen activos en el bus comprobando las palabras de
estado del bus %IW0.m.1.16 a %IW0.m.1.23. Realice un diagnóstico de los esclavos defectuosos mediante una petición de diagnóstico
(véase página 68).Nota: En modalidad de arranque no automático, el bit de arranque de E/S es %QW0.m.1.1.
80 35008150 12/2018
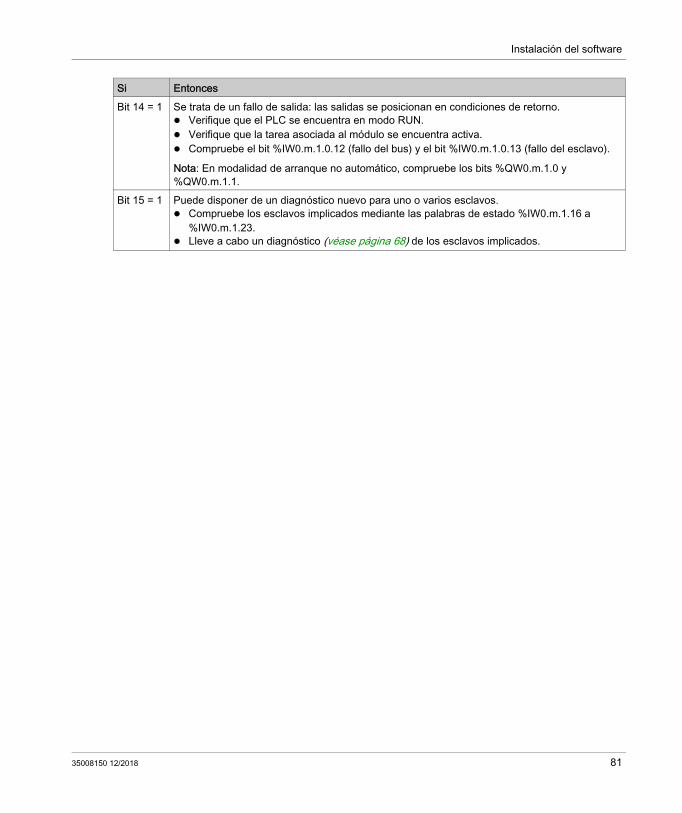
Instalación del software
Bit 14 = 1 Se trata de un fallo de salida: las salidas se posicionan en condiciones de retorno. Verifique que el PLC se encuentra en modo RUN. Verifique que la tarea asociada al módulo se encuentra activa. Compruebe el bit %IW0.m.1.0.12 (fallo del bus) y el bit %IW0.m.1.0.13 (fallo del esclavo).
Nota: En modalidad de arranque no automático, compruebe los bits %QW0.m.1.0 y %QW0.m.1.1.
Bit 15 = 1 Puede disponer de un diagnóstico nuevo para uno o varios esclavos. Compruebe los esclavos implicados mediante las palabras de estado %IW0.m.1.16 a
%IW0.m.1.23. Lleve a cabo un diagnóstico (véase página 68) de los esclavos implicados.
Si Entonces
35008150 12/2018 81
Instalación del software
82 35008150 12/2018

Premium y Atrium con EcoStruxure™ Control ExpertObjetos de lenguaje CANopen35008150 12/2018
Objetos de lenguaje CANopen
Capítulo 4Objetos de lenguaje CANopen
Finalidad de este capítuloEn este capítulo se describen los objetos de lenguaje asociados con el canal de comunicación CANopen.
Contenido de este capítuloEste capítulo contiene las siguientes secciones:
Sección Apartado Página4.1 Objetos de lenguaje e IODDT para la comunicación CANopen 844.2 Los objetos de lenguaje y el IODDT genérico aplicable a los protocolos de
comunicación94
4.3 Objetos de lenguaje del IODDT específico de CANopen 984.4 El IODDT T_GEN_MOD aplicable a todos los módulos 1054.5 Objetos de lenguaje de configuración CANopen 1074.6 Códigos de error CANopen 109
35008150 12/2018 83

Objetos de lenguaje CANopen
Objetos de lenguaje e IODDT para la comunicación CANopen
Sección 4.1Objetos de lenguaje e IODDT para la comunicación CANopen
Finalidad de esta secciónEn esta sección se ofrece una descripción general de las generalidades relativas a los IODDT y los objetos de lenguaje para la comunicación CANopen.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaIntroducción a los objetos de lenguaje para la comunicación CANopen 85Intercambio implícito de objetos de lenguaje asociados a la función específica de la aplicación 86Objetos de lenguaje de intercambio explícito asociados con la función específica de aplicaciones
87
Gestión de intercambios e informes con objetos explícitos 89
84 35008150 12/2018

Objetos de lenguaje CANopen
Introducción a los objetos de lenguaje para la comunicación CANopen
GeneralLos IODDT están predefinidos por el fabricante. Contienen objetos de lenguaje de entradas/salidas que pertenecen al canal de un módulo específico de la aplicación.La comunicación CANopen tiene dos IODDT asociados: T_COM_STS_GEN, que se aplica a los protocolos de comunicación, excepto Fipio y Ethernet. T_COM_CPP110, que es específico de la comunicación CANopen.
NOTA: La creación de una variable de tipo IODDT se realiza de dos maneras: Mediante la ficha Objetos de E/S (véase EcoStruxure™ Control Expert, Modalidades de
funcionamiento), Mediante el Editor de datos.
Tipos de objetos de lenguajeEn cada IODDT se incluye un conjunto de objetos de lenguaje que permite la activación y la comprobación del funcionamiento.Existen dos tipos de objetos de lenguaje: Los objetos de intercambio implícito, que se intercambian de forma automática cada vez que
se completa un ciclo de la tarea asociada al módulo. Los objetos de intercambio explícito, que se intercambian cuando lo requiere la aplicación,
mediante las instrucciones de intercambio explícito.Los intercambios implícitos son aquellos relativos al estado de los módulos, las señales de comunicación, los esclavos, etc. Los intercambios explícitos permiten parametrizar el módulo, así como diagnosticarlo.
35008150 12/2018 85

Objetos de lenguaje CANopen
Intercambio implícito de objetos de lenguaje asociados a la función específica de la aplicación
PresentaciónUna interfaz integrada específica de la aplicación o la adición de un módulo enriquecen automáti-camente la aplicación de objetos de lenguaje utilizada para programar esta interfaz o este módulo.Estos objetos corresponden a las imágenes de las entradas/salidas y a los datos de software del módulo o de la interfaz integrada específica de la aplicación.
NotasLas entradas (%I y %IW) del módulo se actualizan en la memoria del PLC al comienzo de la tarea; el autómata puede estar en modalidad RUN o STOP.Las salidas (%Q y %QW) se actualizan al final de la tarea sólo cuando el PLC se encuentra en modalidad RUN.NOTA: Cuando la tarea está en modalidad STOP, en función de la configuración elegida, puede darse una de las situaciones siguientes: Las salidas se actualizan en posición de retorno (modalidad de retorno). Las salidas se mantienen en su último valor (modalidad de mantenimiento).
FiguraEn el siguiente gráfico se muestra el ciclo de funcionamiento relacionado con una tarea del autómata (ejecución cíclica).
86 35008150 12/2018
Objetos de lenguaje CANopen
Objetos de lenguaje de intercambio explícito asociados con la función específica de aplicaciones
IntroducciónLos intercambios explícitos se realizan a petición del programa de usuario mediante estas instrucciones: READ_STS (leer palabras de estado) WRITE_CMD (escribir palabras de comando) WRITE_PARAM (escribir parámetros de ajuste) READ_PARAM (leer parámetros de ajuste) SAVE_PARAM (guardar parámetros de ajuste) RESTORE_PARAM (restaurar parámetros de ajuste)Para obtener más información detallada sobre las instrucciones, consulte EcoStruxure™ Control Expert, Gestión de E/S, Biblioteca de bloques.Estos intercambios se aplican a un conjunto de objetos %MW del mismo tipo (estado, comandos o parámetros) que pertenecen a un canal.Los objetos pueden: proporcionar información acerca del módulo (por ejemplo, el tipo de error detectado en un
canal); controlar comandos del módulo (por ejemplo, cambio); definir las modalidades de funcionamiento del módulo (guardar y restaurar parámetros de
ajuste durante el proceso de una aplicación).NOTA: Para evitar diversos intercambios explícitos simultáneos para el mismo canal, es necesario comprobar el valor de la palabra EXCH_STS (%MWr.m.c.0) del IODDT asociado al canal antes de llamar a cualquier EF que se direccione a este canal.NOTA: El intercambio explícito no se admite cuando los módulos de E/S analógicas y digitales de X80 se configuran a través de un módulo adaptador eX80 (BMECRA31210) en una configuración Quantum EIO. No puede configurar los parámetros de un módulo en la aplicación del PLC durante el funcionamiento.
35008150 12/2018 87

Objetos de lenguaje CANopen
Principios generales de uso de las instrucciones explícitasEn el siguiente diagrama se muestran los diferentes tipos de intercambios explícitos que pueden realizarse entre la aplicación y el módulo.
Gestión de intercambiosDurante un intercambio explícito, compruebe el rendimiento para ver si los datos sólo se tienen en cuenta cuando el intercambio se efectúa correctamente.Para ello se cuenta con dos tipos de información: información concerniente al intercambio en curso, (véase página 92) el informe de intercambio. (véase página 92)En el siguiente diagrama se describen los principios de gestión de intercambios.
NOTA: Para evitar diversos intercambios explícitos simultáneos para el mismo canal, es necesario comprobar el valor de la palabra EXCH_STS (%MWr.m.c.0) del IODDT asociado al canal antes de llamar a cualquier EF que se direccione a este canal.
88 35008150 12/2018

Objetos de lenguaje CANopen
Gestión de intercambios e informes con objetos explícitos
PresentaciónAl intercambiar datos entre la memoria del PLC y el módulo, éste puede requerir diversos ciclos de tarea para reconocer dicha información. Para gestionar los intercambios, todos los IODDT disponen de dos palabras: EXCH_STS (%MWr.m.c.0): intercambio en curso EXCH_RPT (%MWr.m.c.1): informe
NOTA: En función de la localización del módulo, la aplicación no detectará la gestión de los intercambios explícitos (%MW0.0.MOD.0.0, por ejemplo): Para los módulos en bastidor, los intercambios explícitos se realizan inmediatamente en el bus
del PLC local y se acaban antes del final de la tarea de ejecución. De este modo, el READ_STS, por ejemplo, finaliza cuando la aplicación comprueba el bit %MW0.0.mod.0.0.
Para bus remotos (como Fipio), los intercambios explícitos no están sincronizados con la tarea de ejecución, por lo que la aplicación puede detectarlos.
IlustraciónEn la siguiente ilustración se muestran los distintos bits significativos para la gestión de intercambios:
35008150 12/2018 89

Objetos de lenguaje CANopen
Descripción de los bits significativosCada uno de los bits de las palabras EXCH_STS (%MWr.m.c.0) y EXCH_RPT (%MWr.m.c.1) está asociado a un tipo de parámetro: Los bits de rango 0 están asociados a los parámetros de estado: El bit STS_IN_PROGR (%MWr.m.c.0.0) indica si hay en curso una petición de lectura para
las palabras de estado. El bit STS_ERR (%MWr.m.c.1.0) especifica si el canal del módulo acepta o no la petición
de lectura para las palabras de estado. Los bits de rango 1 están asociados a los parámetros de comando: El bit CMD_IN_PROGR (%MWr.m.c.0.1) indica si se están enviando los parámetros de
comando al canal del módulo. El bit CMD_ERR (%MWr.m.c.1.1) especifica si el canal del módulo acepta los parámetros de
comando. Los bits de rango 2 están asociados a los parámetros de ajuste: El bit ADJ_IN_PROGR (%MWr.m.c.0.2) indica si los parámetros de ajuste se están
intercambiando con el canal del módulo (mediante WRITE_PARAM, READ_PARAM, SAVE_PARAM, RESTORE_PARAM).
El bit ADJ_ERR (%MWr.m.c.1.2) especifica si el módulo acepta los parámetros de ajuste. Si el intercambio se ejecuta correctamente, el bit se establece en 0.
Los bits de rango 15 indican una nueva configuración en el canal c del módulo desde la consola (modificación de los parámetros de configuración + arranque en frío del canal).
Los bits r, m y c indican los siguientes elementos: El bit r representa el número de bastidor. El bit m representa la posición del módulo en el bastidor. El bit c representa el número de canal en el módulo.
NOTA: r representa el número de bastidor, m la posición del módulo en el bastidor y c representa el número de canal en el módulo.NOTA: Las palabras de intercambio y de informe también existen en el nivel del módulo EXCH_STS (%MWr.m.MOD) y EXCH_RPT (%MWr.m.MOD.1) según el IODDT de tipo T_GEN_MOD.
90 35008150 12/2018

Objetos de lenguaje CANopen
Ejemplo Fase 1: Envío de datos mediante la instrucción WRITE_PARAM.
Cuando el PLC explora la instrucción, el bit Intercambio en curso se establece en 1 en %MWr.m.c.
Fase 2: Análisis de los datos por el módulo de E/S e informe.
Cuando se intercambian datos entre la memoria del PLC y el módulo, el reconocimiento por parte del módulo se gestiona mediante el bit ADJ_ERR (%MWr.m.c.1.2).
Este bit crea los siguientes informes:: 0: intercambio correcto 1: intercambio incorrectoNOTA: No hay parámetro de ajuste en el nivel del módulo.
35008150 12/2018 91

Objetos de lenguaje CANopen
Indicadores de ejecución de un intercambio explícito: EXCH_STSEn la tabla siguiente se muestran los bits de control de los intercambios explícitos: EXCH_STS (%MWr.m.c.0)
NOTA: Si el módulo no está presente o está desconectado, los objetos de intercambio explícito (READ_STS, por ejemplo) no se envían al módulo (STS_IN_PROG (%MWr.m.c.0.0) = 0), pero se actualizan las palabras.
Informe de intercambio explícito: EXCH_RPTEn la tabla siguiente se muestran los bits de informe: EXCH_RPT (%MWr.m.c.1):
Símbolo estándar Tipo Acceso Significado Dirección STS_IN_PROGR BOOL R Lectura de las palabras de estado del
canal en curso%MWr.m.c.0.0
CMD_IN_PROGR BOOL R Intercambio de parámetros de comando en curso
%MWr.m.c.0.1
ADJ_IN_PROGR BOOL R Intercambio de parámetros de ajuste en curso
%MWr.m.c.0.2
RECONF_IN_PROGR BOOL R Reconfiguración del módulo en curso %MWr.m.c.0.15
Símbolo estándar Tipo Acceso Significado Dirección STS_ERR BOOL R Error detectado al leer las palabras de
estado del canal (1 = error detectado)
%MWr.m.c.1.0
CMD_ERR BOOL R Error detectado durante un intercambio de parámetros de comando (1 = error detectado)
%MWr.m.c.1.1
ADJ_ERR BOOL R Error detectado durante un intercambio de parámetros de ajuste (1 = error detectado)
%MWr.m.c.1.2
RECONF_ERR BOOL R Error detectado durante la reconfiguración del canal (1 = error detectado)
%MWr.m.c.1.15
92 35008150 12/2018

Objetos de lenguaje CANopen
Utilización del módulo de conteoEn la tabla siguiente se describen los pasos realizados entre un módulo de conteo y el sistema tras una conexión.
Si al comienzo de la aplicación utiliza un comando WRITE_PARAM, espere hasta que el bit %MWr.m.c.0.2 pase a 0.
Paso Acción1 Encender.2 El sistema emite los parámetros de configuración.3 El sistema emite los parámetros de ajuste mediante el método WRITE_PARAM.
Nota: Cuando finaliza la operación, el bit %MWr.m.c.0.2 pasa a 0.
35008150 12/2018 93

Objetos de lenguaje CANopen
Los objetos de lenguaje y el IODDT genérico aplicable a los protocolos de comunicación
Sección 4.2Los objetos de lenguaje y el IODDT genérico aplicable a los protocolos de comunicación
Acerca de esta secciónEn esta sección se presentan los objetos de lenguaje y el IODDT genérico que se aplican a todos los protocolos de comunicación excepto Fipio y Ethernet.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaDetalles de los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN 95Detalles de los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN 96
94 35008150 12/2018
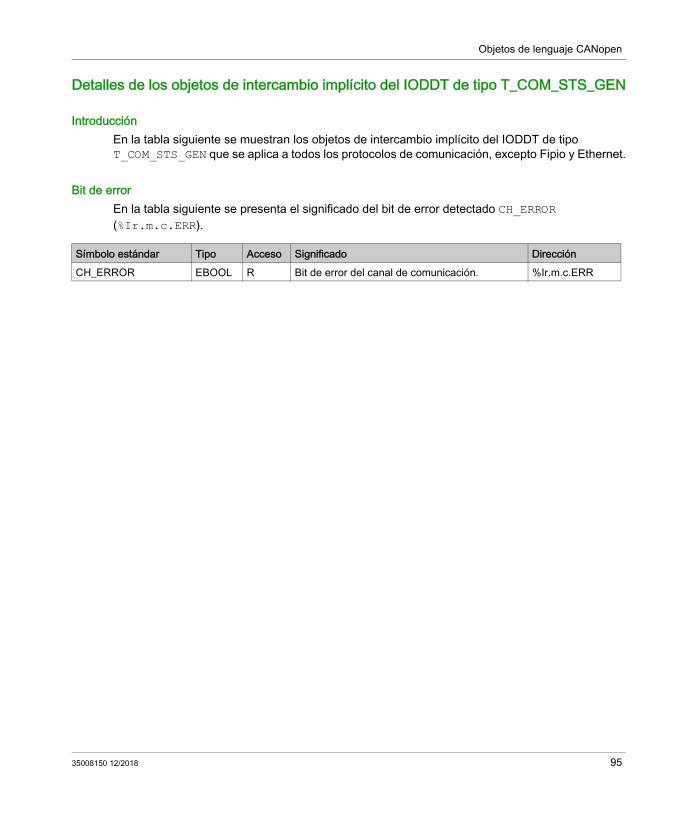
Objetos de lenguaje CANopen
Detalles de los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN
IntroducciónEn la tabla siguiente se muestran los objetos de intercambio implícito del IODDT de tipo T_COM_STS_GEN que se aplica a todos los protocolos de comunicación, excepto Fipio y Ethernet.
Bit de errorEn la tabla siguiente se presenta el significado del bit de error detectado CH_ERROR (%Ir.m.c.ERR).
Símbolo estándar Tipo Acceso Significado Dirección CH_ERROR EBOOL R Bit de error del canal de comunicación. %Ir.m.c.ERR
35008150 12/2018 95

Objetos de lenguaje CANopen
Detalles de los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN
IntroducciónEn esta parte se presentan los objetos de intercambio explícito del IODDT de tipo T_COM_STS_GEN que se aplica a todos los protocolos de comunicación, excepto Fipio y Ethernet. Agrupa los objetos de tipo palabra, cuyos bits tienen un significado particular. Estos objetos se presentan con detalle a continuación.Ejemplo de declaración de una variable: IODDT_VAR1 de tipo T_COM_STS_GEN
Observaciones En general, el significado de los bits se indica para el estado 1 del bit. En los casos específicos,
se explica cada estado del bit. No se utilizan todos los bits.
Indicadores de ejecución de un intercambio explícito: EXCH_STSEn la siguiente tabla se muestra el significado de los bits de control de intercambio de canal desde el canal EXCH_STS (%MWr.m.c.0).
Informe de los intercambios explícitos: EXCH_RPTEn la tabla siguiente se muestra el significado de los bits de informe de intercambio EXCH_RPT (%MWr.m.c.1).
Símbolo estándar Tipo Acceso Significado Dirección STS_IN_PROGR BOOL R Lectura de las palabras de estado del canal en curso. %MWr.m.c.0.0CMD_IN_PROGR BOOL R Intercambio de parámetros de comando en curso. %MWr.m.c.0.1ADJ_IN_PROGR BOOL R Intercambio de parámetros de ajuste en curso. %MWr.m.c.0.2
Símbolo estándar Tipo Acceso Significado Dirección STS_ERR BOOL R Fallo de lectura de las palabras de estado del canal. %MWr.m.c.1.0CMD_ERR BOOL R Fallo durante un intercambio de parámetros de
comando. %MWr.m.c.1.1
ADJ_ERR BOOL R Fallo durante un intercambio de parámetros de ajuste.
%MWr.m.c.1.2
96 35008150 12/2018

Objetos de lenguaje CANopen
Fallos de canal estándar, CH_FLT En la siguiente tabla se muestra el significado de los bits de la palabra de estado CH_FLT (%MWr.m.c.2). La lectura se realiza mediante un READ_STS (IODDT_VAR1).
Símbolo estándar Tipo Acceso Significado Dirección NO_DEVICE BOOL R No funciona ningún dispositivo en el canal. %MWr.m.c.2.01_DEVICE_FLT BOOL R Un equipo del canal no está operativo. %MWr.m.c.2.1BLK BOOL R Bloque de terminales no conectado. %MWr.m.c.2.2TO_ERR BOOL R Anomalía de tiempo de espera excedido. %MWr.m.c.2.3INTERNAL_FLT BOOL R Error interno detectado o autoprueba del canal. %MWr.m.c.2.4CONF_FLT BOOL R Configuraciones de hardware y software diferentes. %MWr.m.c.2.5COM_FLT BOOL R Interrupción de la comunicación con el PLC. %MWr.m.c.2.6APPLI_FLT BOOL R Error detectado de aplicación (ajuste o
configuración).%MWr.m.c.2.7
35008150 12/2018 97
Objetos de lenguaje CANopen
Objetos de lenguaje del IODDT específico de CANopen
Sección 4.3Objetos de lenguaje del IODDT específico de CANopen
Finalidad de esta secciónEn esta sección se describen los objetos de lenguaje implícitos y explícitos del IODDT específico de CANopen, T_COM_CPP110.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaDetalles de objetos de intercambio implícito del IODDT de tipo T_COM_CPP110 99Detalles de objetos de intercambio implícito de tipo T_COM_CPP110 no pertenecientes al IODDT
103
Objetos de lenguaje de intercambio explícito del IODDT T_COM_CPP110 104
98 35008150 12/2018

Objetos de lenguaje CANopen
Detalles de objetos de intercambio implícito del IODDT de tipo T_COM_CPP110
PresentaciónEn la siguiente tabla se describen todos los objetos de lenguaje con intercambio implícito del IODDT de tipo T_COM_CPP110 para una comunicación CANopen con la tarjeta PCMCIA TSX CPP 110.
Bit de errorEn la tabla siguiente se muestran los diferentes objetos de bits de intercambio implícito.
Bits de estado de comunicaciónEn la tabla siguiente se presenta la palabra de error para la gestión del bus CANopen. Se ofrecen detalles bit a bit.
Símbolo estándar Tipo Acceso Significado Dirección CH_ERROR EBOOL R Bit de error del canal de comunicación. %I0.m.0.ERR
Símbolo estándar Tipo Acceso Significado Dirección CAN_FLT BOOL R Error de canal, OR lógico entre todos los bits que
siguen excepto el bit 15.%IW0.m.1.0.0
SOFT_CONF BOOL R Configurado de manera incorrecta %IW0.m.1.0.8PDO_EXCH_FLT BOOL R Error en intercambio de E/S (PDO) %IW0.m.1.0.9MSG_EXCH_FLT BOOL R Error de intercambio de mensaje (SDO) %IW0.m.1.0.10CARD_FLT BOOL R Error de tarjeta (falta tarjeta o no está listo) %IW0.m.1.0.11BUS_FLT BOOL R Fallo de bus (se ha generado al menos un evento
de tipo error de bus)%IW0.m.1.0.12
SLAVE_FLT_B BOOL R Fallo de esclavo (se ha detectado un error de comunicación con uno o varios esclavos)
%IW0.m.1.0.13
OUTP_FLT BOOL R Error de salida (las salidas se colocan en estado de recuperación)
%IW0.m.1.0.14
SLAVE_DIAG BOOL R Nuevos diagnósticos de esclavos disponibles (hay un nuevo diagnóstico disponible para uno o varios esclavos)
%IW0.m.1.0.15
35008150 12/2018 99

Objetos de lenguaje CANopen
Bits de estado del maestro CANopenEn la tabla siguiente se presenta la palabra de error del maestro del bus CANopen MAST_STS (%IW0.m.1.3). Se ofrecen detalles bit a bit.
Símbolo estándar Tipo Acceso Significado Dirección PARAM_FLT BOOL R Error de parámetros %IW0.m.1.3.0SLAVE_OUTP_FLT BOOL R Indica que tras el fallo de un esclavo las salidas
se ponen a cero, Eliminación automática activada.
%IW0.m.1.3.1
NO_BUS_EXCH BOOL R Sin intercambios en el bus (no hay esclavos comunicándose)
%IW0.m.1.3.2
CARD_NO_ACT BOOL R Error grave, la tarjeta no está activa en el bus %IW0.m.1.3.3FEW_BUS_ERR BOOL R Se han detectado uno o varios eventos de error
de bus%IW0.m.1.3.4
CARD_ACC_PROH BOOL R El procesador no ha recibido aún autorización para acceder a la tarjeta.
%IW0.m.1.3.5
TIMEOUT_MSG BOOL R Tiempo de espera excedido al enviar mensajes CAN
%IW0.m.1.3.6
CNX_FLT BOOL R Conexión fallida entre la tarjeta y la unidad de comunicación.
%IW0.m.1.3.7
- - R Los bits 8 a 15 de MAST_STS constituyen un byte cuyo valor indica la modalidad de servicio. 16#00: modalidad offline 16#40: bus en modo STOP 16#80: las salidas están en modo de
seguridad (establecidas en cero) 16#C0: bus en modo RUN
de %IW0.m.1.3.8 a %IW0.m.1.3.15
100 35008150 12/2018

Objetos de lenguaje CANopen
Palabra de estado para dispositivos busEn la tabla siguiente se presenta la palabra de estado para los dispositivos bus CANopen.
Palabras de estado del busEn la tabla siguiente se presentan las palabras de estado para el bus CANopen. Estas palabras se desglosan en bits, cada uno de los cuales representa un esclavo de bus.
Símbolo estándar Tipo Acceso Significado Dirección SLAVE_STS INT R El byte menos significativo (bits 0 a 7) contiene la
dirección del esclavo que ha generado el último error.El byte más significativo (bits x8 a x15) contiene el último código de error.
%IW0.m.1.4
Símbolo estándar Tipo Acceso Significado Dirección SLAVE_ACTIV_0 BOOL R Esclavo 0 activo en el bus. %IW0.m.1.8.0SLAVE_ACTIV_1 BOOL R Esclavo 1 activo en el bus. %IW0.m.1.8.1... ... ... ... ...SLAVE_ACTIV_15 BOOL R Esclavo 15 activo en el bus. %IW0.m.1.8.15SLAVE_ACTIV_16 BOOL R Esclavo 16 activo en el bus. %IW0.m.1.9.0... ... ... ... ...SLAVE_ACTIV_31 BOOL R Esclavo 31 activo en el bus. %IW0.m.1.9.15SLAVE_ACTIV_32 BOOL R Esclavo 32 activo en el bus. %IW0.m.1.10.0... ... ... ... ...SLAVE_ACTIV_47 BOOL R Esclavo 47 activo en el bus. %IW0.m.1.10.15SLAVE_ACTIV_48 BOOL R Esclavo 48 activo en el bus. %IW0.m.1.11.0... ... ... ... ...SLAVE_ACTIV_63 BOOL R Esclavo 63 activo en el bus. %IW0.m.1.11.15SLAVE_ACTIV_64 BOOL R Esclavo 64 activo en el bus. %IW0.m.1.12.0... ... ... ... ...SLAVE_ACTIV_79 BOOL R Esclavo 79 activo en el bus. %IW0.m.1.12.15SLAVE_ACTIV_80 BOOL R Esclavo 80 activo en el bus. %IW0.m.1.13.0... ... ... ... ...SLAVE_ACTIV_95 BOOL R Esclavo 95 activo en el bus. %IW0.m.1.13.15SLAVE_ACTIV_96 BOOL R Esclavo 96 activo en el bus. %IW0.m.1.14.0... ... ... ... ...SLAVE_ACTIV_111 BOOL R Esclavo 111 activo en el bus. %IW0.m.1.14.15SLAVE_ACTIV_112 BOOL R Esclavo 112 activo en el bus. %IW0.m.1.15.0
35008150 12/2018 101

Objetos de lenguaje CANopen
Palabra de salidaEn la tabla siguiente se presenta la palabra de salida %QW0.m.1.0 de la tarjeta PCMCIA de CANopen. Se ofrecen detalles bit a bit.
NOTA: Los bits de comandos 2 y 3 no se restablecen a cero automáticamente por la aplicación.
... ... ... ... ...SLAVE_ACTIV_127 BOOL R Esclavo 127 activo en el bus. %IW0.m.1.15.15
Símbolo estándar Tipo Acceso Significado Dirección
Símbolo estándar Tipo Acceso Significado Dirección ACT_BUS_CONF BOOL RW Este bit sólo se utiliza cuando la aplicación
gestiona el arranque del bus: 1: activa la configuración del bus 0: desactiva la configuración del bus
%QW0.m.1.0.0
ACT_DATA_TR BOOL RW Este bit sólo se utiliza cuando el arranque es semi-automático o lo gestiona la aplicación 1: activa la transferencia de datos en el bus 0: desactiva la transferencia de datos en el
bus
%QW0.m.1.0.1
INIT_ERR_BIT BOOL RW Inicializa los bits de error: Errores de E/S, errores de mensaje, errores de histórico.
%QW0.m.1.0.2
INIT_CARD BOOL RW Inicializa la tarjeta PCMCIA. Este bit arranca en caliente la tarjeta y sólo se utiliza cuando la aplicación gestiona el arranque del bus.
%QW0.m.1.0.3
102 35008150 12/2018

Objetos de lenguaje CANopen
Detalles de objetos de intercambio implícito de tipo T_COM_CPP110 no pertenecientes al IODDT
PresentaciónEn la siguiente tabla se describen los objetos de lenguaje CANopen que no pertenecen a un IODDT específico, pero que se pueden utilizar directamente en función de su número.
Objetos de palabra de entradaEn la siguiente tabla se muestran los diferentes objetos de palabra de entrada de intercambio implícito que no pertenecen a un IODDT.
Objeto (1) Función Significado%IW0.m.1.1 Palabra de error Esta palabra contiene un código de error del
módulo (véase página 109) (error de última configuración o de E/S)
%IW0.m.1.2 Palabra de error Esta palabra contiene un código de error detallado del módulo (véase página 112) (error de última configuración o de E/S)
%IW0.m.1.5 Palabra de estado de contador
Contador del número de errores de bus
%IW0.m.1.6 Palabra de estado de contador
Contador del número de paradas de bus
%IWy.1.7 Palabra de estado de contador
Contador del número de tiempos de espera en los mensajes CAN
%IW0.m.1.16 a%IW0.m.1.23
Palabras de estado del bus
Diagnósticos disponibles en el bus, cada bit establecido en 1 corresponde a un dispositivo para el que existe un diagnóstico (8 palabras de 16 bits, luego 128 bits, el maestro y 127 esclavos)
35008150 12/2018 103
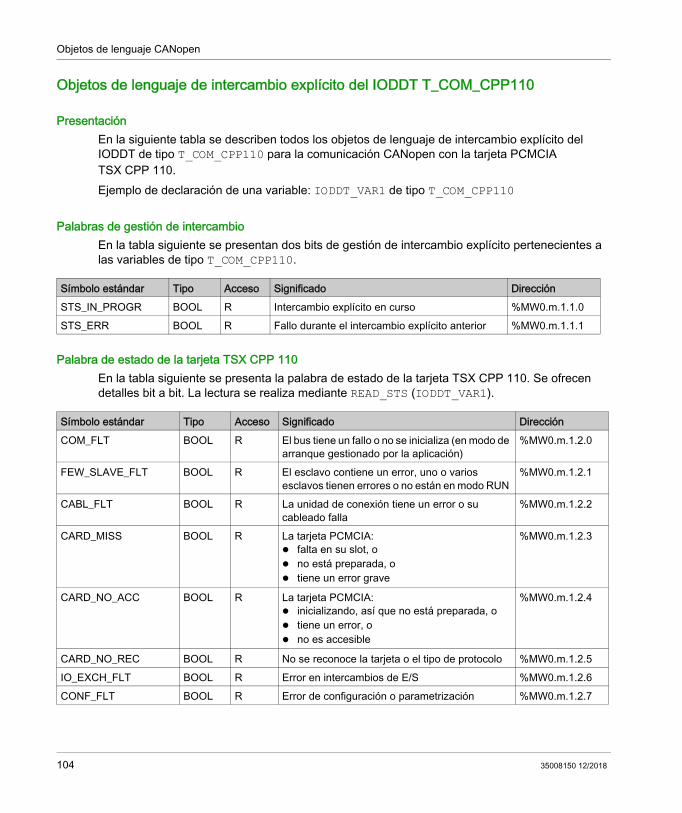
Objetos de lenguaje CANopen
Objetos de lenguaje de intercambio explícito del IODDT T_COM_CPP110
PresentaciónEn la siguiente tabla se describen todos los objetos de lenguaje de intercambio explícito del IODDT de tipo T_COM_CPP110 para la comunicación CANopen con la tarjeta PCMCIA TSX CPP 110.Ejemplo de declaración de una variable: IODDT_VAR1 de tipo T_COM_CPP110
Palabras de gestión de intercambioEn la tabla siguiente se presentan dos bits de gestión de intercambio explícito pertenecientes a las variables de tipo T_COM_CPP110.
Palabra de estado de la tarjeta TSX CPP 110En la tabla siguiente se presenta la palabra de estado de la tarjeta TSX CPP 110. Se ofrecen detalles bit a bit. La lectura se realiza mediante READ_STS (IODDT_VAR1).
Símbolo estándar Tipo Acceso Significado Dirección STS_IN_PROGR BOOL R Intercambio explícito en curso %MW0.m.1.1.0STS_ERR BOOL R Fallo durante el intercambio explícito anterior %MW0.m.1.1.1
Símbolo estándar Tipo Acceso Significado Dirección COM_FLT BOOL R El bus tiene un fallo o no se inicializa (en modo de
arranque gestionado por la aplicación)%MW0.m.1.2.0
FEW_SLAVE_FLT BOOL R El esclavo contiene un error, uno o varios esclavos tienen errores o no están en modo RUN
%MW0.m.1.2.1
CABL_FLT BOOL R La unidad de conexión tiene un error o su cableado falla
%MW0.m.1.2.2
CARD_MISS BOOL R La tarjeta PCMCIA: falta en su slot, o no está preparada, o tiene un error grave
%MW0.m.1.2.3
CARD_NO_ACC BOOL R La tarjeta PCMCIA: inicializando, así que no está preparada, o tiene un error, o no es accesible
%MW0.m.1.2.4
CARD_NO_REC BOOL R No se reconoce la tarjeta o el tipo de protocolo %MW0.m.1.2.5IO_EXCH_FLT BOOL R Error en intercambios de E/S %MW0.m.1.2.6CONF_FLT BOOL R Error de configuración o parametrización %MW0.m.1.2.7
104 35008150 12/2018

Objetos de lenguaje CANopen
El IODDT T_GEN_MOD aplicable a todos los módulos
Sección 4.4El IODDT T_GEN_MOD aplicable a todos los módulos
Detalles de los objetos de lenguaje del IODDT de tipo T_GEN_MOD
IntroducciónLos módulos de los PLC Premium cuentan con un IODDT asociado de tipo T_GEN_MOD.
Observaciones Por lo general, el significado de los bits viene dado por el estado 1 del bit. En determinados
casos, se explica cada estado del bit. No se utilizan todos los bits.
35008150 12/2018 105

Objetos de lenguaje CANopen
Lista de objetos En la tabla siguiente se muestran los objetos del IODDT:
Símbolo estándar Tipo Acceso Significado Dirección MOD_ERROR BOOL R Bit de error del módulo %Ir.m.MOD.ERREXCH_STS INT R Palabra de control de intercambio del módulo %MWr.m.MOD.0STS_IN_PROGR BOOL R Lectura de palabras de estado del módulo en
curso%MWr.m.MOD.0.0
EXCH_RPT INT R Palabra de informe de intercambio %MWr.m.MOD.1STS_ERR BOOL R Error detectado al leer las palabras de estado del
módulo%MWr.m.MOD.1.0
MOD_FLT INT R Palabra de error interno del módulo %MWr.m.MOD.2MOD_FAIL BOOL R Error interno, módulo no operativo %MWr.m.MOD.2.0CH_FLT BOOL R Error de canal detectado %MWr.m.MOD.2.1BLK BOOL R Error del bloque de terminales %MWr.m.MOD.2.2CONF_FLT BOOL R Discrepancia en la configuración del hardware o
del software%MWr.m.MOD.2.5
NO_MOD BOOL R Falta el módulo o no está operativo %MWr.m.MOD.2.6EXT_MOD_FLT BOOL R Palabra de error interno del módulo (sólo
extensión Fipio)%MWr.m.MOD.2.7
MOD_FAIL_EXT BOOL R Módulo fuera de servicio (sólo extensión Fipio) %MWr.m.MOD.2.8CH_FLT_EXT BOOL R Error de canal detectado (sólo extensión Fipio) %MWr.m.MOD.2.9BLK_EXT BOOL R Error del bloque de terminales detectado (sólo
extensión Fipio)%MWr.m.MOD.2.10
CONF_FLT_EXT BOOL R Discrepancia en la configuración del hardware o del software (sólo extensión Fipio)
%MWr.m.MOD.2.13
NO_MOD_EXT BOOL R Falta el módulo o no está operativo (sólo extensión Fipio)
%MWr.m.MOD.2.14
106 35008150 12/2018
Objetos de lenguaje CANopen
Objetos de lenguaje de configuración CANopen
Sección 4.5Objetos de lenguaje de configuración CANopen
Objetos de lenguaje asociados con la configuración
PresentaciónEn esta página se describen todos los objetos de lenguaje de configuración para la comunicación CANopen con la tarjeta PCMCIA TSX CPP 110 que se pueden mostrar con el programa de aplicación.
35008150 12/2018 107

Objetos de lenguaje CANopen
Constantes internasEn la siguiente tabla se describen las constantes internas:
Objeto Tipo Acceso Significado%KW0.m.1.0 INT R Valor de constante utilizado por el sistema
Byte menos significativo: 16#00Byte más significativo: 16#37
%KW0.m.1.1 INT R Bits de configuración Modo de recuperación de salida cuando el PLC
cambia al modo STOP:Bit 0 = 0: Restablecer Bit 0 = 1: Mantener
Bit 1 = 0: carga de configuración mediante terminalBit 1 = 1: uso de configuración Flash EEPROM
Control de bus al arranque:Bit 2 = 0: AutomáticoBit 2 = 1: Mediante la aplicación
Control de E/S al arranque:Bit 3 = 0: AutomáticoBit 3 = 1: Mediante la aplicación
Sincronización de intercambio de datos Bit 4 = 0: Tarea MASTBit 4 = 1: Tarea FAST
Bit 5 reservado Watchdog de tarjeta PCMCIA CANopen
Bit 6 = 0: ActivadoBit 6 = 1: Desactivado
Bit 7 a bit 15 reservado
%KW0.m.1.2 INT R Bits de configuraciónTamaño de la configuración del bus en la memoria (en número de bytes)
%KW0.m.1.3 INT R Bits de configuraciónTamaño del área de imagen de entrada en la memoria (en número de palabras).
%KW0.m.1.4 INT R Bits de configuraciónTamaño del área de imagen de salida en la memoria (en número de palabras).
%KW0.m.1.5 INT R Bits de configuraciónDirección del inicio del área de imagen de entrada (%MW)
%KW0.m.1.6 INT R Bits de configuraciónDirección del inicio del área de imagen de salida (%MW)
108 35008150 12/2018

Objetos de lenguaje CANopen
Códigos de error CANopen
Sección 4.6Códigos de error CANopen
Códigos de error CANopen
PresentaciónEn la siguiente tabla se describen los diferentes códigos de error que pueden surgir en una configuración CAN.Las explicaciones proporcionadas en cada tabla permiten programar la aplicación con el fin de detectar y corregir de forma más fácil cualquier funcionamiento anómalo futuro.
Códigos de error del móduloEn la siguiente tabla se describen los códigos de error localizados en las palabras %IW0.m.1.1 (en la columna Descripción) y %IW0.m.1.2 (en la columna Detalles).
Código Descripción Detalles0 Sin error, funcionamiento correcto
Errores estándar100 Dirección no válida (puntero NULL) -101 Valor no válido Valor102 ID de objeto no válido ID103 Estado de controlador no válido Código de estado104 Tamaño de área de memoria de
lectura no válidoTamaño de memoria
105 Tamaño de datos escritos no válido Tamaño de los datos106 Timeout Contador de tiempo de espera de una
transferencia SDO o estado de carga al descargar una configuración
107 Error de sincronización -108 Detenido por el usuario -
Errores de recursos200 Desborde de memoria -201 Recursos de memoria saturados -
35008150 12/2018 109

Objetos de lenguaje CANopen
Errores de mensaje300 Dirección de origen no válida Valor de dirección301 Dirección de destino no válida Valor de dirección302 Servicio no válido Código de servicio303 Clase de servicio no válido para un ID
de segmentoValor especificado
304 Función primitiva de servicio no válida Código de función305 Llamada a ID de servicio no válida Valor especificado306 Puerta de comunicación no válida Número de puerto307 ID de dispositivo de bus no válido Valor de ID308 Índice SDO no válido Valor de índice309 Subíndice SDO no válido Valor de subíndice310 Error remoto al ejecutar un servicio Código de error311 ID de COB no válido Valor de ID de COB312 Tipo de transferencia no válida en la
capa de enlaceCódigo de transferencia solicitado 101: enviar 102: recibir 103: enviar y recibir
Errores de tarjeta PCMCIA600 Falta tarjeta -601 Tarjeta diferente a TSX CPP 110
detectada-
602 Tarjeta no preparada para la comunicación
-
603 La tarjeta ya no está en modo RUN -Errores de comunicación de tarjeta PCMCIA
700 Error al enviar un mensaje a la tarjeta -701 Error al recibir un mensaje procedente
de la tarjeta-
702 Error al enviar un PDO de salida a la tarjeta
-
703 Error al recibir un PDO de entrada de la tarjeta
-
Código Descripción Detalles
110 35008150 12/2018

Objetos de lenguaje CANopen
Errores de configuración.800 Tamaño incorrecto de los datos de
configuración del busTamaño de los datos de configuración
801 Tamaño de datos de imagen de entrada no válido
Tamaño, en número de palabras, fijo al arranque de la tarjeta
802 Tamaño de datos de imagen de salida no válido
Tamaño, en número de palabras, fijo al arranque de la tarjeta
803 Solapamiento de áreas de memoria reservadas para entradas y salidas
Tipo de solapamiento: 1: el inicio del área de entrada
abarca el final del área de salida 2: el inicio del área de salida abarca
el final del área de entrada.804 Área de carga de datos no encontrada Tipo de área:
1: datos globales 2: parámetros de bus 3: modo de sincronización
805 Suma de comprobación de datos de configuración no válida (datos de configuración de bus incoherentes en modo Sycon)
Suma de comprobación de datos de configuración de bus ubicada en la memoria Flash de la tarjeta
806 Informe negativo en descarga de configuración
Byte más significativo: código de error de tarjeta (véase página 112).Byte menos significativo: 16#00: no hay carga en curso 16#01: solicitud de carga 16#02: carga en curso 16#03: carga finalizada 16#11: transferencia al PC
solicitada 16#12: transferencia al PC en curso
Código Descripción Detalles
35008150 12/2018 111
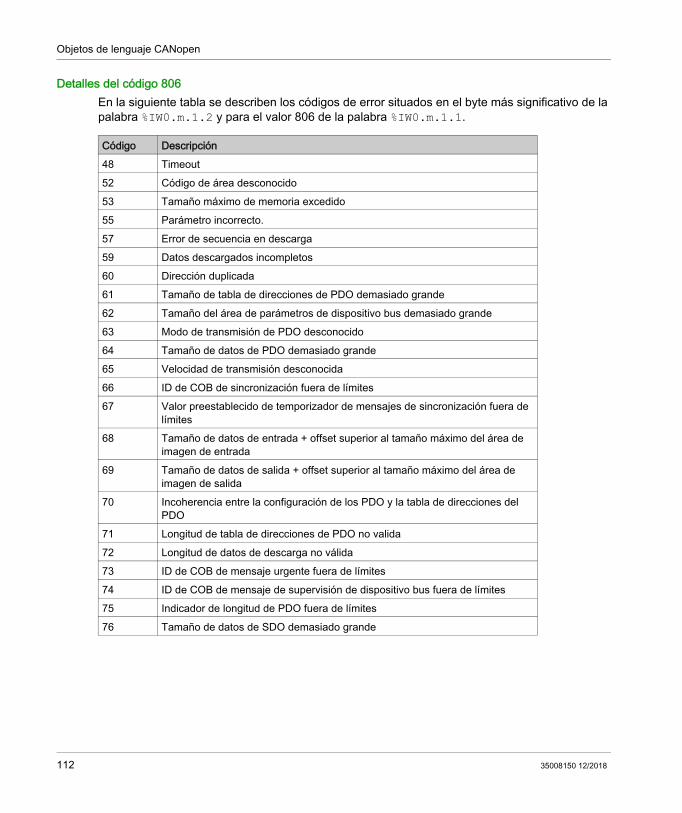
Objetos de lenguaje CANopen
Detalles del código 806En la siguiente tabla se describen los códigos de error situados en el byte más significativo de la palabra %IW0.m.1.2 y para el valor 806 de la palabra %IW0.m.1.1.
Código Descripción48 Timeout52 Código de área desconocido53 Tamaño máximo de memoria excedido55 Parámetro incorrecto.57 Error de secuencia en descarga59 Datos descargados incompletos60 Dirección duplicada61 Tamaño de tabla de direcciones de PDO demasiado grande62 Tamaño del área de parámetros de dispositivo bus demasiado grande63 Modo de transmisión de PDO desconocido64 Tamaño de datos de PDO demasiado grande65 Velocidad de transmisión desconocida66 ID de COB de sincronización fuera de límites67 Valor preestablecido de temporizador de mensajes de sincronización fuera de
límites 68 Tamaño de datos de entrada + offset superior al tamaño máximo del área de
imagen de entrada69 Tamaño de datos de salida + offset superior al tamaño máximo del área de
imagen de salida70 Incoherencia entre la configuración de los PDO y la tabla de direcciones del
PDO71 Longitud de tabla de direcciones de PDO no valida72 Longitud de datos de descarga no válida73 ID de COB de mensaje urgente fuera de límites74 ID de COB de mensaje de supervisión de dispositivo bus fuera de límites75 Indicador de longitud de PDO fuera de límites76 Tamaño de datos de SDO demasiado grande
112 35008150 12/2018
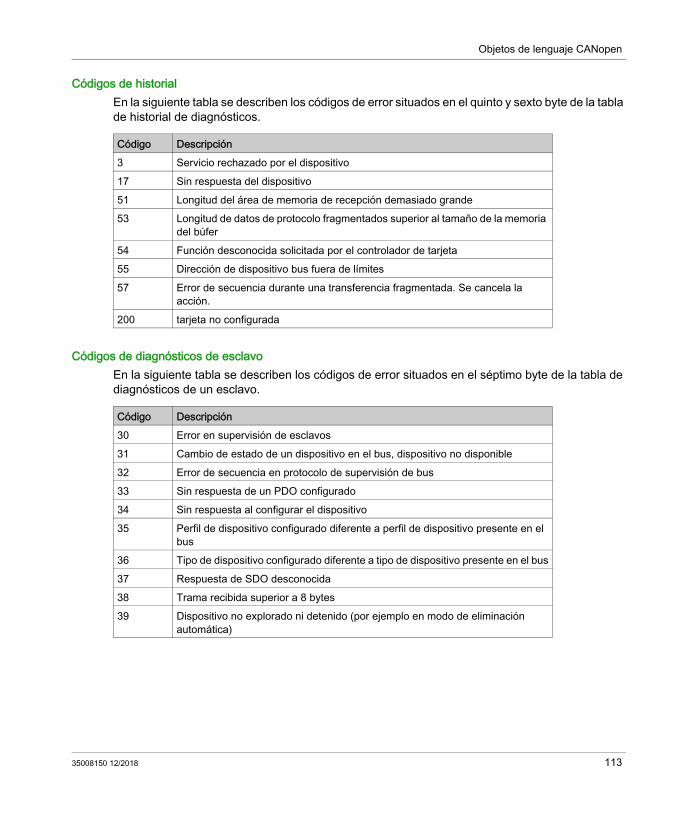
Objetos de lenguaje CANopen
Códigos de historialEn la siguiente tabla se describen los códigos de error situados en el quinto y sexto byte de la tabla de historial de diagnósticos.
Códigos de diagnósticos de esclavoEn la siguiente tabla se describen los códigos de error situados en el séptimo byte de la tabla de diagnósticos de un esclavo.
Código Descripción3 Servicio rechazado por el dispositivo17 Sin respuesta del dispositivo51 Longitud del área de memoria de recepción demasiado grande53 Longitud de datos de protocolo fragmentados superior al tamaño de la memoria
del búfer54 Función desconocida solicitada por el controlador de tarjeta55 Dirección de dispositivo bus fuera de límites57 Error de secuencia durante una transferencia fragmentada. Se cancela la
acción.200 tarjeta no configurada
Código Descripción30 Error en supervisión de esclavos31 Cambio de estado de un dispositivo en el bus, dispositivo no disponible32 Error de secuencia en protocolo de supervisión de bus33 Sin respuesta de un PDO configurado34 Sin respuesta al configurar el dispositivo35 Perfil de dispositivo configurado diferente a perfil de dispositivo presente en el
bus36 Tipo de dispositivo configurado diferente a tipo de dispositivo presente en el bus37 Respuesta de SDO desconocida38 Trama recibida superior a 8 bytes39 Dispositivo no explorado ni detenido (por ejemplo en modo de eliminación
automática)
35008150 12/2018 113

Objetos de lenguaje CANopen
Códigos de error de carga de SyconEn la siguiente tabla se describen los códigos de error que pueden aparecer al cargar configura-ciones o firmware en la tarjeta mediante el controlador X-WAY.
Código Descripción0 Sin error, funcionamiento correctoErrores estándar8001 Controlador inoperativo8002 Código de evento desconocido del controlador8003 Código de comando no reconocido por el controlador8004 Comando rechazado8005 Otro comando sigue activo8006 Comando enviado a un dispositivo no válidoErrores de asignación8010 Sin dispositivo asignado8011 Dispositivo ya asignadoErrores de comunicación8020 Envío de una solicitud de servicio cuando no hay un dispositivo conectado8021 Inicialización de una conexión cuando ya hay una8022 Time out8030 Error de lectura de estado de controlador8031 Error posterior al envío de una solicitud en la red8032 Bandeja de salida aún ocupada8033 Error de respuesta de red8034 Sin respuesta disponible de la bandeja de entrada8035 Error de transferencia de datos de entrada/salidaErrores de inicialización de controlador8080 Errores de parametrización8081 Error general de inicialización de controladorErrores de procesamiento multitarea-1 Tarea de trabajo no creada-2 Puntero de tarea u objeto sincronizado no válido-3 No se han creado eventos de sincronización
114 35008150 12/2018
Premium y Atrium con EcoStruxure™ Control ExpertEjemplos de instalación de CANopen35008150 12/2018
Ejemplos de instalación del bus CANopen
Capítulo 5Ejemplos de instalación del bus CANopen
Finalidad de este capítuloEn este capítulo se utiliza un ejemplo para describir la instalación del bus CANopen con la ayuda de la herramienta SyCon (V2.8) y el software Control Expert.
Contenido de este capítuloEste capítulo contiene las siguientes secciones:
Sección Apartado Página5.1 Descripción del ejemplo 1165.2 Instalación del hardware 1175.3 Implementación del software 125
35008150 12/2018 115
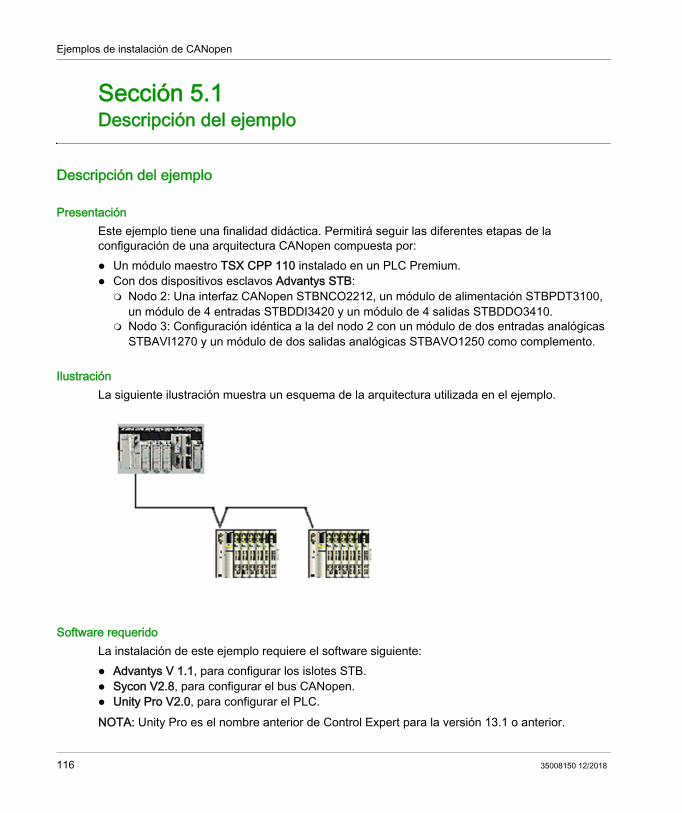
Ejemplos de instalación de CANopen
Descripción del ejemplo
Sección 5.1Descripción del ejemplo
Descripción del ejemplo
PresentaciónEste ejemplo tiene una finalidad didáctica. Permitirá seguir las diferentes etapas de la configuración de una arquitectura CANopen compuesta por: Un módulo maestro TSX CPP 110 instalado en un PLC Premium. Con dos dispositivos esclavos Advantys STB: Nodo 2: Una interfaz CANopen STBNCO2212, un módulo de alimentación STBPDT3100,
un módulo de 4 entradas STBDDI3420 y un módulo de 4 salidas STBDDO3410. Nodo 3: Configuración idéntica a la del nodo 2 con un módulo de dos entradas analógicas
STBAVI1270 y un módulo de dos salidas analógicas STBAVO1250 como complemento.
IlustraciónLa siguiente ilustración muestra un esquema de la arquitectura utilizada en el ejemplo.
Software requeridoLa instalación de este ejemplo requiere el software siguiente: Advantys V 1.1, para configurar los islotes STB. Sycon V2.8, para configurar el bus CANopen. Unity Pro V2.0, para configurar el PLC.NOTA: Unity Pro es el nombre anterior de Control Expert para la versión 13.1 o anterior.
116 35008150 12/2018
Ejemplos de instalación de CANopen
Instalación del hardware
Sección 5.2Instalación del hardware
Objeto de este subcapítuloEste subcapítulo muestra la instalación del hardware del ejemplo CANopen.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaConfiguración de hardware islotes Advantys 118Configuración del hardware del maestro 121Configuración de hardware del bus 122
35008150 12/2018 117

Ejemplos de instalación de CANopen
Configuración de hardware islotes Advantys
PresentaciónLa primera fase de instalación consiste en configurar el hardware de los esclavos CANopen. Una vez reunidos los diferentes elementos de los islotes STB antes descritos y efectuadas las conexiones de las alimentaciones, deberá seguir los siguientes pasos.
Fijación de la velocidad de transmisiónEn este ejemplo, veremos cómo se configura una velocidad de transmisión de 250 KBit/s para cada STB.
Fijación de la dirección CANopen del STBEn este ejemplo veremos cómo se configura la dirección de cada STB (2 para el primero y 3 para el segundo).
Paso Acción1 Desconectar el primer STB.2 Colocar el conmutador superior en 4.
Nota: 0 = 10 KBits/s, 1 = 20 KBits/s, 2 = 50 KBits/s, 3 = 125 KBits/s, 4 = 250 KBits/s, 5 = 500 KBits/s, 6 = 800 KBits/s y 7 = 1MBits/s.
3 Colocar el conmutador inferior en "Baud rate" (posición superior en 9).4 Conecte el STB.
Resultado: el STB está configurado para trabajar a una velocidad de 250 KBit/s.5 Repita los mismos pasos para el segundo STB.
Paso Acción1 Desconectar el STB.2 Colocar el conmutador superior en 0 (cifra de las decenas).3 Colocar el conmutador inferior en 2 (cifra de las unidades).
Nota: para el segundo STB, seleccionar 3:4 Conecte el STB.
Resultado: el STB está configurado con la dirección definida en los conmutadores.
118 35008150 12/2018

Ejemplos de instalación de CANopen
Carga de la configuración del STBEn este ejemplo, veremos cómo se carga una configuración en un STB utilizando la configuración automática sin tarjeta SIM.
Realización de una comprobación visualCuando los STB están listos para dialogar con una tarjeta CANopen TSX CPP 110, será necesaria una comprobación:
Fallo de configuraciónCuando la configuración presente en la memoria flash es diferente de la configuración real (configuración física), los indicadores luminosos: del módulo CAnopen (NCO) RUN y PWR están encendidos, CANRUN parpadea en verde,
ERR y CANERR parpadean en rojo. del módulo de alimentación (PDT) IN y OUT están encendidos. de los módulos de E/S RDY y OUT parpadean en cada módulo no presente en la configuración
de la memoria flash y están encendidos fijos en los otros.
Paso Acción1 Compruebe que el STB está conectado.2 Retire la tarjeta SIM si la hay.3 Pulse durante más de 5 segundos en el botón Reset.
Resultado: el STB efectúa su procedimiento de arranque y de inicialización, se explora la configuración de hardware (módulos del STB) y se almacena en la memoria flash.Nota: si hay una tarjeta SIM, el STB intenta cargar la configuración que ésta contiene, si no hay tarjeta SIM, el STB intenta cargar la configuración contenida en la memoria flash. Al pulsar en el botón Reset se actualiza la memoria flash con la configuración física presente realmente. Deberá inicializar siempre que la configuración haya cambiado o si no conoce el contenido de la memoria flash.
Paso Acción1 Compruebe que los indicadores luminosos RUN y PWR del módulo CANopen
(NCO) están encendidos.2 Compruebe que el indicador luminoso CANRUN del módulo CANopen (NCO)
parpadea.3 Compruebe que los indicadores luminosos IN y OUT del módulo de
alimentación (PDT) están encendidos.4 Compruebe que el indicador luminoso RDY de los módulos de E/S está
encendido en cada uno de los módulos de E/S.Resultado: el diagnóstico visual mediante los indicadores luminosos permite pensar que los STB están configurados correctamente y listos para instalar en un bus CANopen.
35008150 12/2018 119

Ejemplos de instalación de CANopen
Fallo del móduloAlgunos módulos pueden mostrar situaciones de fallo (ausencia de alimentación de las salidas en un módulo DDO3230, por ejemplo). En este caso, RDY se enciende y ERR parpadea en el módulo averiado.
120 35008150 12/2018

Ejemplos de instalación de CANopen
Configuración del hardware del maestro
PresentaciónEl bus CANopen está dirigido por un autómata Premium en el que está instalada una tarjeta TSX CPP 110. Para más detalles sobre la tarjeta TSX CPP 110 diríjase al capítulo hardware (véase página 22) de este documento.
Procedimiento de instalaciónLa tabla siguiente describe el procedimiento para instalar físicamente una tarjeta TSX CPP 110.
Paso Acción1 Verificar que el autómata está desconectado.2 Montar y fijar los módulos del rack de base.3 Introducir la tarjeta TSX CPP 110 en su ubicación en el procesador
(véase página 25).4 Conecte la alimentación del autómata y efectúe la conexión.
Nota: al estar correctamente alimentado el autómata, se podrá realizar ahora la configuración del software.
35008150 12/2018 121
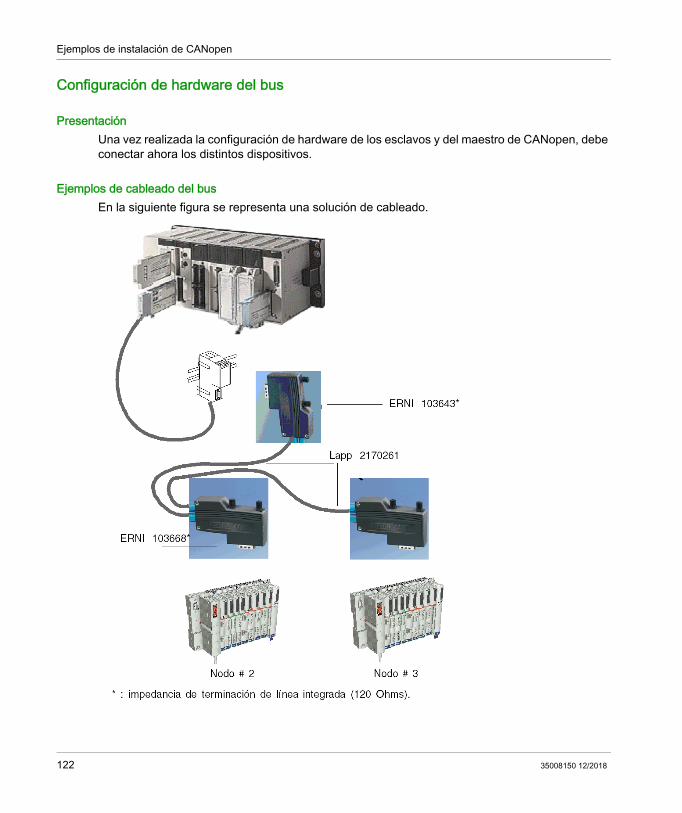
Ejemplos de instalación de CANopen
Configuración de hardware del bus
PresentaciónUna vez realizada la configuración de hardware de los esclavos y del maestro de CANopen, debe conectar ahora los distintos dispositivos.
Ejemplos de cableado del busEn la siguiente figura se representa una solución de cableado.
122 35008150 12/2018

Ejemplos de instalación de CANopen
Algunas referenciasEjemplo de cableado de la empresa Selectron: DCA 701 (código de artículo 44170014)Para obtener más información, visite el sitio de Internet: http://www.selectron.ch.
Ejemplo de cableado de la empresa Lapp: UNITRONIC BUS CAN 2170261: Cable de par trenzado doblemente apantallado de 120 Ohms.Para obtener más información, visite el sitio de Internet: http://www.lappcable.com/products.
Ejemplo de conectores de la empresa ERNI: 1 conector encadenado, referencia 103668 (conectado al nodo 2). 2 conectores de fin de bus, referencias 103643 (uno de los cuales está conectado al dispositivo
de conexión TSX CPP 110 y el otro al nodo 3).Para obtener más información, visite el sitio de Internet: http://www.erni.com.
Diagrama de conectoresLos conectores utilizados son conectores SUB D de 9 pins:
35008150 12/2018 123

Ejemplos de instalación de CANopen
Descripción de los pinsEn esta tabla se proporciona la función de cada pin.
NOTA: Asegúrese de conectar correctamente el blindaje del cable al conector.Para obtener más detalles, consulte el manual de instalación del hardware CANopen disponible en telemecanique.com.
Elemento Descripción1 reservado2 CAN_L3 CAN_GND4 reservado5 NC6 NC7 CAN_H8 reservado9 NC
124 35008150 12/2018

Ejemplos de instalación de CANopen
Implementación del software
Sección 5.3Implementación del software
Finalidad de esta secciónEste subcapítulo muestra la instalación del software del ejemplo CANopen.Los pasos que deben seguirse son los siguientes: Creación de la configuración de los STB Advantys y creación de archivos EDS de cada nodo. Creación de la configuración CANopen con Sycon (utilización de los archivos EDS creados
previamente para configurar cada nodo). Creación de la aplicación del PLC con Control Expert y transferencia en el Premium/Atrium.
Contenido de esta secciónEsta sección contiene los siguientes apartados:
Apartado PáginaConfiguración de software Advantys 126Declaración del maestro CANopen con Sycon e importación EDS 132Configuración del bus CANopen 135Declaración de los nodos 2 y 3 136Configuración de los nodos 2 y 3 138Configuración de la tarjeta PCMCIA TSX CPP 110 140Depuración 145
35008150 12/2018 125

Ejemplos de instalación de CANopen
Configuración de software Advantys
PresentaciónLa creación de la configuración de los nodos Advantys y el guardado posterior de los archivos EDS se efectúa mediante el software Advantys.Éstas son las funciones principales: Modificación de los parámetros predeterminados de los módulos de E/S (modo de retorno de
las salidas, por ejemplo) Carga de la configuración en la tarjeta SIM (si está presente), Creación de los archivos EDS.NOTA: En nuestro ejemplo sólo será necesaria la última función debido a que no utilizamos tarjeta SIM y la configuración predeterminada nos satisface totalmente (véase página 119).NOTA: El software Advantys no es obligatorio ya que puede utilizar los archivos EDS genéricos disponibles en Sycon. Sin embargo, este tipo de figura requiere profundos conocimientos del software Sycon.
126 35008150 12/2018
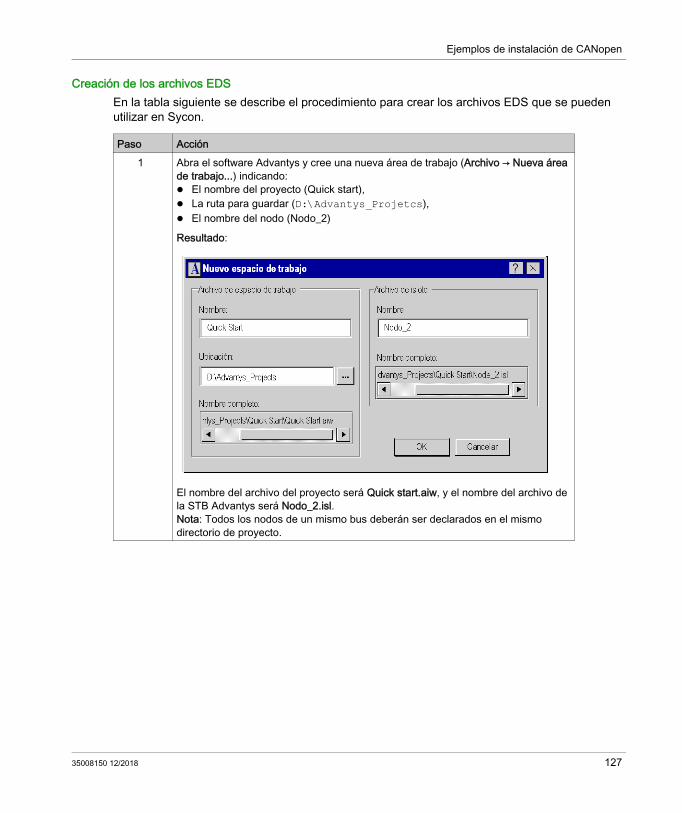
Ejemplos de instalación de CANopen
Creación de los archivos EDSEn la tabla siguiente se describe el procedimiento para crear los archivos EDS que se pueden utilizar en Sycon.
Paso Acción1 Abra el software Advantys y cree una nueva área de trabajo (Archivo → Nueva área
de trabajo...) indicando: El nombre del proyecto (Quick start), La ruta para guardar (D:\Advantys_Projetcs), El nombre del nodo (Nodo_2)
Resultado:
El nombre del archivo del proyecto será Quick start.aiw, y el nombre del archivo de la STB Advantys será Nodo_2.isl.Nota: Todos los nodos de un mismo bus deberán ser declarados en el mismo directorio de proyecto.
35008150 12/2018 127
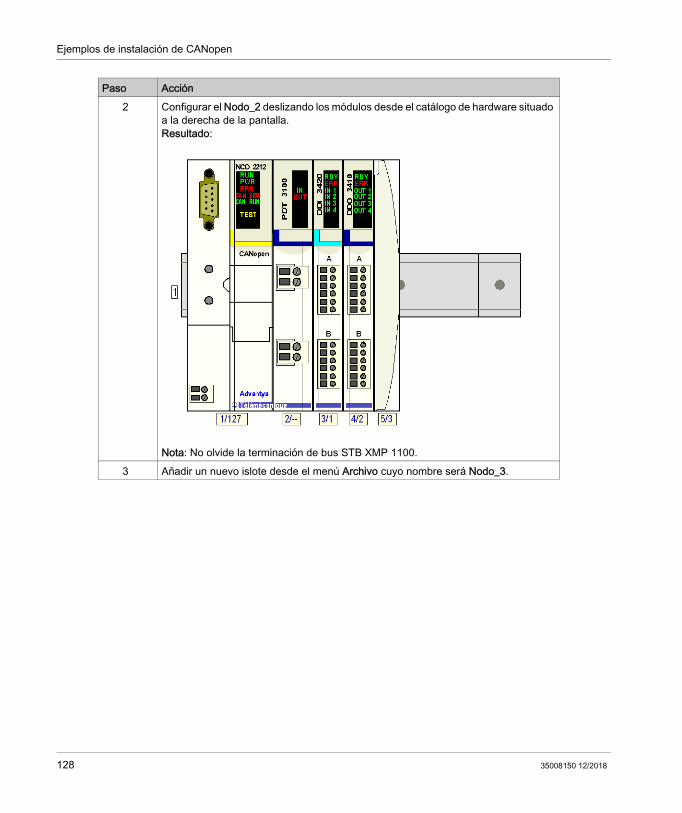
Ejemplos de instalación de CANopen
2 Configurar el Nodo_2 deslizando los módulos desde el catálogo de hardware situado a la derecha de la pantalla.Resultado:
Nota: No olvide la terminación de bus STB XMP 1100.
3 Añadir un nuevo islote desde el menú Archivo cuyo nombre será Nodo_3.
Paso Acción
128 35008150 12/2018

Ejemplos de instalación de CANopen
4 Repetir el paso 2 para el Nodo_3.Nota: En caso de que se haya olvidado de la alimentación o de la terminación STB XMP 1100 no podrá visualizar la configuración en modo conectado. La deberá añadir manualmente.Resultado:
5 Seleccionar el Nodo_3 en el menú Islote → Vista de la imagen de E/S para visualizar
la imagen de las E/S.
Paso Acción
35008150 12/2018 129

Ejemplos de instalación de CANopen
6 Haga clic en la pestaña Imagen Bus de campo y marque la casilla Alineación PDO para visualizar los elementos del nodo 3.Resultado:
Nota: Observamos que el nodo 3 posee 3 palabras en salidas y 5 palabras en entrada. Las entradas de la ubicación 1 (módulo DDI) están situadas en el byte menos significativo de la palabra 1. Las E/S del módulo situado en la ubicación 2 (módulo DDO) están situadas en la palabra de entrada 1 (mayor valor) y sus salidas en la palabra de salida 1...Las reglas generales de asignación se explican en a continuación de este documento.
7 Repetir el paso 6 para el Nodo_2 para visualizar los elementos del nodo 2.8 Seleccionar el nodo 2 y crear el archivo EDS seleccionando la opción Archivo →
Exportar Nodo_2... y denominándolo Nodo_2.Nota: en nuestro ejemplo el archivo se guardará en la siguiente ubicación: D:\Advantys_Projects\Quick Start\Nodo_2.eds.
9 Seleccionar el nodo 3 y crear el archivo EDS seleccionando la opción Archivo → Exportar Nodo_3... y denominándolo Nodo_3.Nota: en nuestro ejemplo el archivo se guardará en la siguiente ubicación: D:\Advantys_Projects\Quick Start\Nodo_3.eds.
Paso Acción
130 35008150 12/2018

Ejemplos de instalación de CANopen
Reglas generales de asignaciónA continuación se muestran las principales reglas de colocación de datos en la memoria Advantys: El primer bloque es el bloque de las entradas Todo o Nada, y a continuación viene el bloque de
las entradas analógicas. En cada bloque, los bits E/S están clasificados según la posición física del módulo. Los bits de E/S están ordenados por su número en el módulo. En primer lugar se encuentran
los valores de las E/S, a continuación el eco (sólo para las salidas) y después los bits de estado. Las E/S analógicas están también ordenadas por su número en el módulo. Los valores de E/S
analógicos están situados en el bloque analógico, mientras que los bits de estado están situados en el bloque de las entradas Todo o Nada.
Ejemplo de los datos de entrada del nodo 3
Ejemplo de datos de salida del nodo 3
NOTA: La ubicación es la cifra de la derecha en la etiqueta que aparece debajo de cada módulo.
Datos de entradaPalabra bits 15 a 12 bits 11 a 8 bits 7 a 4 bits 3 a 01 Bit de estado de
ubicación 2Bits de eco de salida de ubicación 2
Bit de estado de ubicación 1
Bit de entrada de ubicación 1
2 Byte de estado de ubicación 3 Byte de estado de ubicación 33 Byte de estado de ubicación 4 Byte de estado de ubicación 44 Entradas analógicas ubicación 35 Entradas analógicas ubicación 4
Datos de salidaPalabra bits 15 a 12 bits 11 a 8 bits 7 a 4 bits 3 a 01 - - - Bits de salida
ubicación 22 Salidas analógicas ubicación 43 Salidas analógicas ubicación 4
35008150 12/2018 131

Ejemplos de instalación de CANopen
Declaración del maestro CANopen con Sycon e importación EDS
PresentaciónVamos a utilizar ahora el software Sycon para crear el bus CANopen y generar la descripción del bus que se cargará en el PLC Premium mediante el software Control Expert.En primer lugar, declararemos el master del bus e importaremos los archivos EDS de nodos 2 y 3 para que sean reconocidos por el software Sycon.
Declaración del maestro del bus CANopenLa siguiente tabla presenta las diferentes etapas para declarar el maestro CANopen.
Paso Acción1 Inicie la herramienta Sycon desde el menú Inicio de Windows o haga clic en el
icono desde la pantalla de configuración de la tarjeta TSX CPP 110 (en el software Control Expert).Resultado: La herramienta SyCon aparecerá en la pantalla.
2 Seleccione el comando Archivo → NuevoResultado: Aparece la pantalla siguiente:
3 Seleccione el CANopen y luego confirme haciendo clic en Aceptar.Resultado: Aparecerá una estructura en blanco en la pantalla.
132 35008150 12/2018
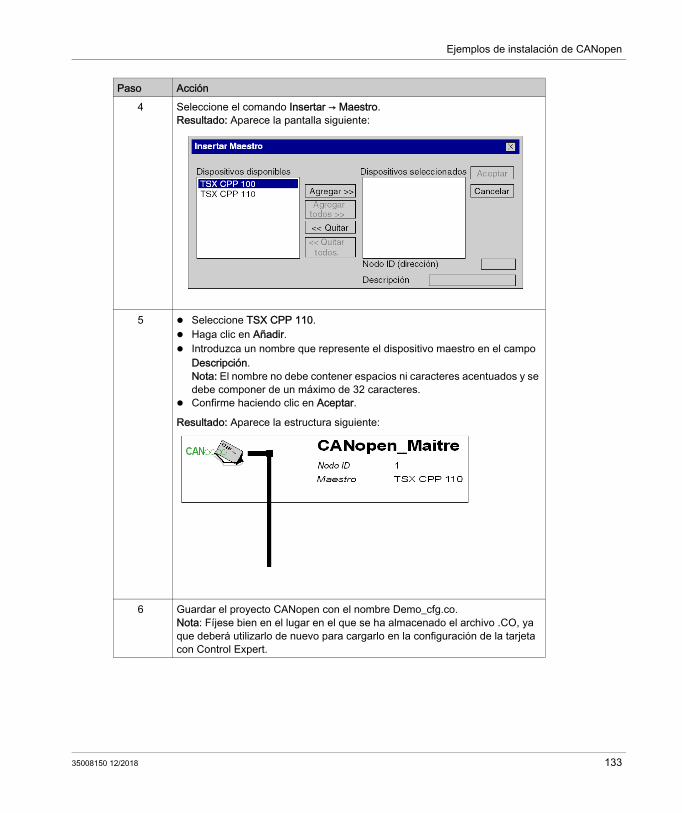
Ejemplos de instalación de CANopen
4 Seleccione el comando Insertar → Maestro.Resultado: Aparece la pantalla siguiente:
5 Seleccione TSX CPP 110. Haga clic en Añadir. Introduzca un nombre que represente el dispositivo maestro en el campo
Descripción.Nota: El nombre no debe contener espacios ni caracteres acentuados y se debe componer de un máximo de 32 caracteres.
Confirme haciendo clic en Aceptar.
Resultado: Aparece la estructura siguiente:
6 Guardar el proyecto CANopen con el nombre Demo_cfg.co.Nota: Fíjese bien en el lugar en el que se ha almacenado el archivo .CO, ya que deberá utilizarlo de nuevo para cargarlo en la configuración de la tarjeta con Control Expert.
Paso Acción
35008150 12/2018 133

Ejemplos de instalación de CANopen
Importación de los archivos EDSLa siguiente tabla presenta los distintos pasos para importar los archivos EDS con Sycon.
Paso Acción1 Inicie el software Sycon si aún no se ejecuta para declarar el maestro del bus
(véase página 132).Resultado: La herramienta SyCon aparecerá en la pantalla.
2 Seleccione la opción Archivo → Copiar EDS para importar los archivos EDS con Sycon.
3 Seleccione el archivo Node_2.eds del directorio D:\Advantys_Projects\Quick Start para importar el archivo EDS del nodo 2.Nota: Rechace la importación del mapa de bits ya que este archivo no ha sido creado.
4 Repita los pasos 2 y 3 para el nodo 3 con el archivo Node_3.eds del directorio D:\Advantys_Projects\Quick Start para importar el archivo EDS del nodo 3.Nota: Rechace la importación del mapa de bits ya que este archivo no ha sido creado.Resultado: Los dos archivos EDS están ahora disponibles para introducir los dos esclavos CANopen (véase página 136).
134 35008150 12/2018
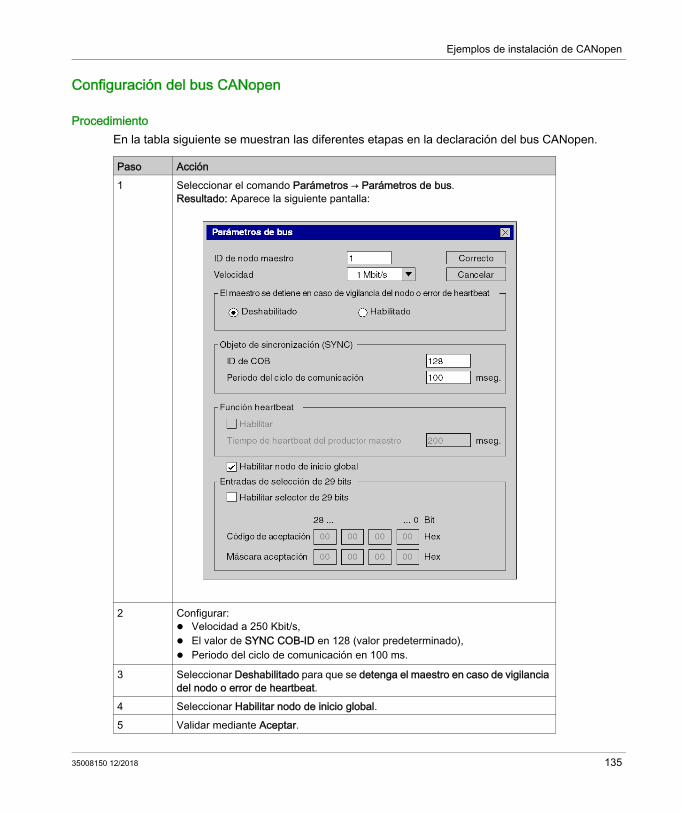
Ejemplos de instalación de CANopen
Configuración del bus CANopen
ProcedimientoEn la tabla siguiente se muestran las diferentes etapas en la declaración del bus CANopen.
Paso Acción1 Seleccionar el comando Parámetros → Parámetros de bus.
Resultado: Aparece la siguiente pantalla:
2 Configurar: Velocidad a 250 Kbit/s, El valor de SYNC COB-ID en 128 (valor predeterminado), Periodo del ciclo de comunicación en 100 ms.
3 Seleccionar Deshabilitado para que se detenga el maestro en caso de vigilancia del nodo o error de heartbeat.
4 Seleccionar Habilitar nodo de inicio global.5 Validar mediante Aceptar.
35008150 12/2018 135

Ejemplos de instalación de CANopen
Declaración de los nodos 2 y 3
ProcedimientoLa siguiente tabla presenta los distintos pasos para declarar los nodos 2 y 3.
Paso Acción1 Seleccionar el comando Insertar → Nodo.
Resultado: Aparece un cursor:2 Colocar el cursor en el bus fuera del cuadro de texto que delimita el maestro y
efectuar un solo clic.Resultado: Aparece la siguiente pantalla:
3 Seleccionar Nodo_2 en la lista de dispositivos disponibles.4 Haga clic en el botón Agregar para introducir el Nodo_2 en la lista de los
dispositivos seleccionados.5 Seleccionar Nodo_3 en la lista de dispositivos disponibles.
136 35008150 12/2018

Ejemplos de instalación de CANopen
6 Hacer clic en el botón Agregar para introducir el Nodo_3 en la lista de los dispositivos seleccionados y validar con Aceptar.Resultado:Aparece la siguiente arquitectura:
Paso Acción
35008150 12/2018 137

Ejemplos de instalación de CANopen
Configuración de los nodos 2 y 3
Configuración del nodo 2En la tabla siguiente se presentan los distintos pasos para configurar el nodo 2.
Paso Acción1 Hacer doble clic en el nodo 2.
Resultado: Aparece la pantalla de configuración, muestra la cuadrícula de los dos PDO (Predefined Process Objects) del nodo. Un PDO de recepción (RxPDO) que permite configurar las salidas y un PDO de emisión (TxPDO) que permite configurar las entradas.
2 Efectuar un doble clic en la primera línea (PDO RxPDO1) para mostrar la ventana de características del PDO.
3 Validar mediante Aceptar debido a que utilizaremos la configuración predeterminada.Resultado: el PDO aparecerá ahora en la zona Objetos de datos de proceso (PDOs) configurados.
4 Repetir los pasos 2 y 3 para el segundo PDO.Resultado: le deberá aparecer la pantalla configurada de la siguiente forma:
138 35008150 12/2018

Ejemplos de instalación de CANopen
Configuración del nodo 3En la tabla siguiente se presentan los distintos pasos para configurar el nodo 3.
5 Hacer clic en Aceptar para validar la configuración del nodo 2.Nota: al estar configurados los PDO, el software Sycon posee ahora toda la información de configuración del nodo 2 para utilizar el archivo EDS correspondiente.
Paso Acción
Paso Acción1 Hacer doble clic en el nodo 3.
Resultado: Aparece la pantalla de configuración, muestra la cuadrícula de los cuatro PDO (Predefined Process Objects) del nodo. Dos PDO de recepción que permiten configurar las salidas y dos PDO de emisión que permiten configurar las entradas.
2 Efectuar un doble clic en la primera línea para mostrar la ventana de configuración del primer PDO.3 Validar mediante Aceptar debido a que utilizaremos la configuración predeterminada.4 Repetir los pasos 2 y 3 para los otros PDO.5 Hacer clic en el botón Configuración de objeto para activar la transmisión de las entradas analógicas.
Nota: la transmisión de las entradas analógicas se desactiva por defecto, por lo tanto será necesario activar esta función.
6 Desplazar hasta el final la barra de la zona Objetos predefinidos especificados en el archivo EDS y hacer doble clic en la línea 6423 0 Analog Input Global Enable en la lista de los objetos predefinidos compatibles.
7 En la columna Valor elegido introducir el valor 1.8 Hacer clic en Aceptar para validar la configuración de los objetos.9 Hacer clic en Aceptar para validar la configuración del nodo 3.
Resultado: el nodo 3 está ahora configurado. Si ha efectuado también la configuración del nodo 2 podrá guardar el proyecto Sycon que ahora se podrá utilizar con el nombre de Demo_cfg.co.
35008150 12/2018 139

Ejemplos de instalación de CANopen
Configuración de la tarjeta PCMCIA TSX CPP 110
PresentaciónUna vez creados los archivos EDS y el creado bus CANopen mediante el software Sycon, deberá declarar y configurar la tarjeta TSX CPP 110 en el PLC.Para declarar la tarjeta, consulte el párrafo correspondiente (véase página 38) en esta documentación.En la ilustración siguiente se muestra la configuración de la tarjeta de este ejemplo. Si desea obtener más información sobre las posibles configuraciones, consulte el párrafo correspondiente (véase página 140).
IlustraciónLa pantalla siguiente indica los parámetros de configuración necesarios para la puesta en marcha de nuestro ejemplo:
140 35008150 12/2018
Ejemplos de instalación de CANopen
Elementos y funcionesEn esta tabla se describen las diferentes zonas que conforman la pantalla de configuración:
Zona Número FunciónMódulo 1 Esta área está constituida por el nombre abreviado de la tarjeta
PCMCIA que ha declarado; tiene que tratarse de una tarjeta CANopen.
Canal 2 Esta zona permite seleccionar el canal de comunicación que se va a configurar.Para obtener la ficha de configuración deberá hacer clic en el canal.
Parámetros generales
3 En esta área, seleccione la tarea asociada con las E/S situadas en el bus CANopen. La tarea seleccionada determinará el ritmo de adquisición de las entradas y las actualizaciones de las salidas de los esclavos del bus CANopen. En nuestro caso, seleccionaremos la tarea maestra (MAST).
Ficha 4 La ficha en primer plano indica el tipo de pantalla que se visualiza. En este caso, se trata de la pantalla de configuración. Si se encuentra en modalidad online, tendrá acceso a otras fichas.Compruebe en este caso que ha hecho clic en la ficha Config. para obtener la pantalla que se muestra en la ilustración.
35008150 12/2018 141
Ejemplos de instalación de CANopen
Config. 5 Esta zona permite seleccionar el comportamiento del bus en el arranque.Seleccione Automático.
6 Esta zona se utiliza para configurar el bus.Haga clic en el botón Control Expert para que se pueda acceder a la configuración con Control Expert.Seleccione el archivo Demo_cfg.co que ha creado con el software Sycon.Resultado: Cuando está seleccionado un archivo .CO, se muestran los parámetros del bus.Nota: Si modifica el archivo .CO con Sycon, haga clic en el botón Actualizar para recargar en la configuración.Nota: Si desea visualizar la lista de los esclavos del bus, haga clic en el botón Configuración de bus.
7 Esta zona permite configurar la modalidad de retorno de las salidas de los dispositivos del bus, así como la dirección (memoria interna del PLC) en la que se leerán periódicamente las salidas de los dispositivos CANopen.En nuestro ejemplo, seleccionamos Restablecer y 32 palabras comenzando por la dirección 50 (%MW50 a %MW81).Veremos más adelante que estas direcciones se corresponden con objetos topológicos (que dependen del esclavo en el que están situadas).
8 Esta zona permite activar o desactivar el watchdog del bus CANopen. El watchdog está activado de forma predeterminada. Se pone en funcionamiento cuando la tarjeta PCMCIA no puede gestionar correctamente el bus. Cuando se pone en funcionamiento, las salidas de los esclavos pasan a cero.En nuestro ejemplo, vamos a dejarlo activado.
9 Esta zona permite configurar la dirección (memoria interna del PLC) en la que se copiarán periódicamente las entradas de los dispositivos CANopen.En nuestro ejemplo, vamos a guardar los valores predeterminados 32 y 0 para indicar que las entradas se almacenarán en las palabras %MW0 a %MW31.También estará disponible un direccionamiento topológico como para las salidas.
10 Este botón permite iniciar el software SyCon, si está instalado en el equipo.
Zona Número Función
142 35008150 12/2018
Ejemplos de instalación de CANopen
Validación y creaciónTras haber completado los diferentes campos de la pantalla de configuración, deberá: Confirmar la configuración. Crear el proyecto.Al efectuar estas dos operaciones, podrá guardar su archivo .STU y transferir su proyecto al PLC.
Reparto de las E/SLas entradas y salidas configuradas en el archivo .CO se reparten de la siguiente forma: %MW0 contiene las entradas del nodo 2. %MW50 contiene las salidas del nodo 2. %MW1 a %MW5 contienen las entradas del nodo 3. %MW51 a %MW53 contienen las salidas del nodo 3.
ADVERTENCIACOMPORTAMIENTO INESPERADO DE LA APLICACIÓNAntes de desactivar el watchdog, asegúrese de que, si la tarjeta PCMCIA no gestiona el bus CANopen, el comportamiento de los dispositivos siga siendo aceptable.El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
35008150 12/2018 143

Ejemplos de instalación de CANopen
Reparto topológico de las E/SSi hace clic en el botón Configuración de bus de la pantalla de configuración, podrá visualizar los dos nodos del bus CANopen y obtener así el direccionamiento topológico de las E/S.Para el nodo 2 tenemos las entradas siguientes: %IW\3.2\0.0.0.0, que corresponde a %MW0.y las siguientes salidas: %QW\3.2\0.0.0.0, que corresponde a %MW50.Para el nodo 3 tenemos las entradas siguientes: %IW\3.3\0.0.0.0, que corresponde a %MW1, %IW\3.3\0.0.0.1, que corresponde a %MW2, %IW\3.3\0.0.0.2, que corresponde a %MW3, %IW\3.3\0.0.0.3, que corresponde a %MW4, %IW\3.3\0.0.0.4, que corresponde a %MW5.y las siguientes salidas: %QW\3.3\0.0.0.0, que corresponde a %MW51, %QW\3.3\0.0.0.1, que corresponde a %MW52, %QW\3.3\0.0.0.2, que corresponde a %MW53.
144 35008150 12/2018

Ejemplos de instalación de CANopen
Depuración
PresentaciónSólo es posible acceder a la pantalla de depuración en modo conectado. Permite visualizar el funcionamiento del bus, de los esclavos y del maestro CANopen.
IlustraciónLa siguiente imagen se extrae de la pantalla de depuración de nuestro ejemplo.
35008150 12/2018 145

Ejemplos de instalación de CANopen
DescripciónEn la tabla siguiente se presentan las distintas áreas de la pantalla de depuración:
Variable Elemento Función1 Estado de los
esclavos CANopen
Esta área muestra todos los esclavos (denominados también nodos) del bus CANopen. Un esclavo en fallo se muestra en rojo, cuando desaparece el fallo se muestra en azul y, si esto no ocurre, se visualiza en negro. La selección de un esclavo actualiza las áreas 2, 4, 5 y 6.Act. : indica si se ha activado el esclavo en la configuración Sycon (1 activado, 0 desactivado)Duración (Life T.): Life Time.En nuestro ejemplo visualizamos dos esclavos (o dos nodos), son los dos nodos de nuestra configuración Sycon.Nota: Cuando se visualiza un nodo en rojo, se pueden obtener las causas de error haciendo clic encima. La línea de información se actualiza automáticamente con la información de diagnóstico.
2 Entradas Cuando se selecciona un esclavo, esta área contiene la lista de palabras que se le asocian en la entrada.Para mayor claridad, se propone la visualización del direccionamiento topológico CANopen (véase página 36) (%IW\3.2\0.0.0.0) y del área de memoria reservada en el autómata (%MW0).Si se selecciona el nodo 2 visualizamos la imagen anterior, si se selecciona el nodo 3, la pantalla cambia y se visualizan los %IW del nodo 3.
3 Valor en la salida
Cuando se selecciona una palabra de salida en el área 4, se podrá modificar su valor introduciendo uno nuevo y haciendo clic en el botón Aceptar.
4 Salidas Cuando se selecciona un esclavo, esta área contiene la lista de palabras que se le asocian en la salida.Para mayor claridad, se ofrece la visualización de la dirección topológica CANopen (véase página 36) (%QW\3.2\0.0.0.0) y de la zona de memoria reservada en el autómata (%MW50).Si se selecciona el nodo 2 visualizamos la imagen anterior, si se selecciona el nodo 3, la pantalla cambia y se visualizan los %QW del nodo 3.
5 Información acerca de...
Cuando se selecciona un esclavo (al hacer clic en el área 1), esta área contiene su último mensaje de diagnóstico y, para obtener información sobre la tarjeta TSX CPP 100, basta con hacer clic en el encabezado de la tabla.
6 Petición que se va a emitir
Esta área permite emitir una petición SDO. La sintaxis de los parámetros es igual a la que se utiliza para llevar a cabo las transferencias SDO mediante las peticiones READ_VAR y WRITE_VAR (véase página 57). Al pulsar el botón Introducir petición aparecen las áreas de introducción de la petición.
146 35008150 12/2018

Premium y Atrium con EcoStruxure™ Control Expert
35008150 12/2018
Apéndices
35008150 12/2018 147

148 35008150 12/2018

Premium y Atrium con EcoStruxure™ Control ExpertEjemplo de configuración35008150 12/2018
Ejemplo de configuración para dispositivos del bus CANopen
Apéndice AEjemplo de configuración para dispositivos del bus CANopen
Finalidad de este capítuloEn este capítulo se presentan tres ejemplos de configuración para dispositivos del bus CANopen. Un ATV 58 Altivar, Una unidad Lexium, Una situación que requiere más de 4 PDO por dispositivo.
Contenido de este capítuloEste capítulo contiene los siguientes apartados:
Apartado PáginaConfiguración de un controlador de velocidad Altivar 150Configuración de un variador Lexium 153Configuración de más de 4 PDO por nodo 156
35008150 12/2018 149

Ejemplo de configuración
Configuración de un controlador de velocidad Altivar
PresentaciónPuede configurar fácilmente un Altivar en el bus CANopen. Veamos cómo se realiza esta configuración.Antes de leer los párrafos siguientes, le aconsejamos que realice el ejemplo de instalación de Advantys STB en un bus CANopen (véase página 115) descrito en este manual, o bien haber leído estas páginas de instalación, ya que hacemos referencia a ellas varias veces.
Configuración de un AltivarEn la tabla siguiente se presentan los distintos pasos para configurar un Altivar.
Paso Acción1 Inicie el software Sycon y cree un nuevo proyecto CANopen (véase página 132).
Resultado: Deberá obtener una arquitectura de bus de este tipo:
2 Seleccione el comando Insertar → Nodo.Resultado: Aparece un cursor:
150 35008150 12/2018

Ejemplo de configuración
3 Colocar el cursor en el bus fuera del cuadro de texto que delimita el maestro y efectuar un solo clic.Resultado: Aparece la pantalla siguiente:
4 Seleccione el archivo Altivar EDS que desea incorporar en el bus y haga clic en Añadir.Nota: Están disponibles cuatro Altivar: ATV58_E: archivos EDS en inglés. ATV58_F: archivos EDS en francés. ATV58F_E: archivos EDS en inglés. ATV58F_F: archivos EDS en francés.
5 Confirme la selección con Aceptar.Resultado: La arquitectura de bus hace que aparezca un nuevo nodo compuesto por un controlador. Ahora se deberá configurar los PDO de este controlador.
6 Hacer doble clic en el nodo del controlador para que aparezca la ventana de los PDO.Resultado: Aparece una pantalla similar a la de los STD Advantys (véase página 150), lo que permite configurar los dos PDO del controlador: PDO en emisión: 1 palabra de estado y 1 palabra para la velocidad actual. PDO en recepción: 1 palabra del registro de control y 1 palabra para la velocidad solicitada.
7 Hacer doble clic en cada PDO y validar los parámetros de transmisión predeterminados.8 Comprobar que las velocidades del nodo y su dirección corresponden a las que se ha fijado en el Altivar.
Nota: Si el Altivar es el último elemento del bus, hay que activar la terminación de final de bus colocando el conmutador en la tarjeta de comunicación CANopen del Altivar.
9 Hacer clic en OK para validar la configuración del nodo.
Paso Acción
35008150 12/2018 151

Ejemplo de configuración
PruebasPuede llevar a cabo algunas pruebas para controlar que el Altivar y el bus funcionan correctamente abriendo la pantalla de actualización de la tarjeta TSX CPP 110 y efectuando las siguientes acciones: Puede arrancar su motor introduciendo los valores 6, 7, 15 en el registro de control (primera
palabra de salida). Puede fijar la velocidad de rotación del motor modificando el valor de la segunda palabra de
salida. Si el Altivar pasa a predeterminado, podrá reinicializar introduciendo el valor 128 en el registro
de control (primera palabra de salida) y retomar las secuencias 6, 7 y 15.NOTA: Tras haber comprobado que el Altivar recibe bien las órdenes con la modificación de palabras del PLC que se le transmiten automáticamente en el bus CANopen, podrá poner en marcha su proyecto de automatismo.
ATV 31El controlador de velocidad ATV 31 es compatible igualmente con CANopen. Para más información sobre su configuración, consulte el manual ATV 31, Protocolo de comunicación CANopen.
10 Guardar el fichero .CO.11 Abra el proyecto Control Expert que contiene el maestro del bus CANopen (tarjeta TSX CPP 110),
declare la tarjeta, importe el archivo .CO guardado, cree el proyecto y transfiéralo al PLC como en el ejemplo STD Advantys (véase página 140).Resultado: El bus CANopen y su Altivar son operativos.
Paso Acción
152 35008150 12/2018

Ejemplo de configuración
Configuración de un variador Lexium
PresentaciónPuede configurar fácilmente un variador Lexium en el bus CANopen. Veamos cómo se realiza esta configuración.Antes de leer los párrafos siguientes, le aconsejamos que realice el ejemplo de instalación de Advantys STB en un bus CANopen (véase página 115) descrito en este manual, o bien haber leído estas páginas de instalación, ya que hacemos referencia a ellas varias veces.
Conexión del LexiumLa conexión del Lexium con el bus CANopen se realiza mediante el adaptador AMO 2CA 001 V000: Se fija con tornillos en el Lexium y se conecta a los cables del bus CANopen.NOTA: Para la instalación de cualquier otro conector, consulte el manual Lexium CANopen que encontrará en el Motion Tools 3.0 CD ROM.
Descripción de los PDO del LexiumComo en el Altivar, los PDO permiten una gestión implícita del Lexium mediante palabras del PLC (%MW o direccionamiento topológico %IW y %QW (véase página 36)).El Lexium utiliza dos tipos de PDO: Los PDO predefinidos: Estos PDO están asociados con comandos específicos del lexium.
Ejemplo: El PDO 22 de este anexo está asociado con la petición 16#6040 para la palabra de comando y con la petición 16#2060 para la Feed rate or current.
Los PDO libres: Estos PDO no están asociados con comandos específicos. Su configuración se realiza por
la aplicación. No describiremos estos PDO en este ejemplo; consulte el manual Lexium CANopen para más información.
Los PDO se cambian a través de dos vías predefinidas: 3 vías de recepción (16#2600, 16#2601, 16#2602) 3 vías de emisión (16#2A00, 16#2A01, 16#2A02).NOTA: El tamaño máximo de los datos es de 8 bytes por vía y el Lexium tiene que ser una versión superior o igual a 5.51.
35008150 12/2018 153

Ejemplo de configuración
Configuración de un PDO del LexiumEn la tabla siguiente se presentan los distintos pasos para configurar un ejemplo de PDO en recepción, el PDO 22 del Lexium, en la vía 1.
Paso Acción1 Inicie el software Sycon y cree un nuevo proyecto CANopen (véase página 132).
Resultado: Deberá obtener una arquitectura de bus de este tipo:
2 Seleccione el comando Insertar → Nodo.Resultado: Aparece un cursor:
3 Colocar el cursor en el bus fuera del cuadro de texto que delimita el maestro y efectuar un solo clic.Resultado: Aparece la pantalla siguiente:
4 Seleccione el archivo EDS LEXIUM17D y haga clic en Añadir.
154 35008150 12/2018

Ejemplo de configuración
PruebasPuede llevar a cabo algunas pruebas para comprobar si el Lexium y el bus funcionan correctamente abriendo la pantalla de depuración de la tarjeta TSX CPP 110 y efectuando las siguientes acciones: Si ha utilizado la configuración predeterminada de la tarjeta TSX CPP 110, la palabra %MW32
(primera palabra de salida) que corresponde a la palabra de control del Lexium, puede modificarla y comprobar la consecuencia en el Lexium.
Además, la palabra doble %MD32 permite acceder a la velocidad.NOTA: tras haber comprobado que su Lexium recibe bien las órdenes con la modificación de palabras del PLC que se le transmiten automáticamente en el bus CANopen, podrá poner en marcha su proyecto de automatismo.
5 Confirme la selección con Aceptar.Resultado: La arquitectura de bus muestra un nuevo nodo compuesto por un Lexium 17D. Ahora deberá configurar el PDO 22 de este variador.
6 Haga doble clic en el nodo del variador para que aparezca la ventana de los PDO.Resultado: Aparece una pantalla similar a la de Advantys STB (véase página 154), lo que permite configurar los dos PDO del controlador:
7 Seleccione en el primer PDO en recepción.8 Haga clic en el botón Agregar los PDO configurados y confirme los parámetros de transmisión
predeterminados haciendo clic en Aceptar.Resultado: Aparece una línea nueva en la lista de PDO configurados.
9 Haga clic en esta línea y después en el botón Asignación de contenido PDO.Resultado: Aparece una nueva ventana.
10 Seleccione el Idx Obj. 2060 (Feed rate or current).11 Haga clic en el botón Agregar objeto y después en Aceptar para confirmar.
Resultado: Las peticiones 16#6040 y 16#2060 están asociadas al PDO. Ahora deberá configurar el PDO.12 Seleccione de nuevo el primer PDO en recepción y haga clic en el botón Configurar objeto.
Resultado: Aparece la ventana de configuración de PDO.13 Desplácese hacia abajo de la lista de Objetos predefinidos especificados en el archivo EDS y seleccione
la línea 1st receive PDO select del objeto predefinido 2600.14 Haga clic en el botón Agregar a los objetos configurados.
Resultado: El objeto aparece en la ventana Objetos configurados automáticamente al arrancar el nodo.15 Introduzca 22 en la casilla correspondiente de la columna Valor elegido.16 Guarde el archivo .CO para poder importarlo en la configuración de la tarjeta TSX CPP 110 con Control
Expert.17 Abra el proyecto Control Expert que contiene el maestro del bus CANopen (tarjeta TSX CPP 110),
declare la tarjeta, importe el archivo .CO guardado, configure la tarjeta con los valores predeterminados, cree el proyecto y transfiéralo al PLC, como en el ejemplo de Advantys STB (véase página 140).Resultado: El bus CANopen y su Lexium son operativos.
Paso Acción
35008150 12/2018 155

Ejemplo de configuración
Configuración de más de 4 PDO por nodo
PresentaciónEs posible configurar por cada nodo 4 PDO de transmisión y 4 de recepción. Esto se debe a que el software Sycon genera automáticamente los ID de COB para garantizar su unicidad y utiliza un algoritmo relativo al perfil 301. En el siguiente párrafo se explica esta operación.Para poder utilizar más de 4 PDO en cada dirección, es necesario emplear un procedimiento manual como el que se describe para la creación de un quinto PDO.
Cómo se asignan los ID de COB Los ID de COB posibles se encuentran entre los valores de 385 y 1407 (16#180 y 16#57F).Puede utilizar el ID de COB de su elección para cada PDO; sin embargo, los ID de COB deben ser únicos en este intervalo de valores. Las herramientas de configuración de CANopen como Sycon están configuradas de forma predeterminada para proporcionar un ID de COB que respete estas limitaciones.En la siguiente tabla se describe el algoritmo utilizado por el software Sycon para llevar a cabo estas asignaciones de ID de COB.
Como el ID de COB determina la prioridad del mensaje (cuanto menor es su valor mayor es su prioridad), las consecuencias son las siguientes: El primer PDO del nodo tienen mayor prioridad que el segundo, tercero y cuarto. Un PDO de transmisión tiene prioridad sobre un PDO de recepción del mismo nodo. Cuanto menor es el número de nodo, mayor es la prioridad de los PDO del nodo.
PDO ID Nodo 1 (decimal)
Nodo 2 (decimal)
... Nodo 127 (decimal)
1.TXPDO 16#180+ID-Nodo 385 386 ... 5111.RXPDO 16#200+ID-Nodo 513 514 ... 6392.TXPDO 16#280+ID-Nodo 641 642 ... 7672.RXPDO 16#300+ID-Nodo 769 770 ... 8953.TXPDO 16#380+ID-Nodo 897 898 ... 10233.RXPDO 16#400+ID-Nodo 1025 1026 ... 11514.TXPDO 16#480+ID-Nodo 1153 1154 ... 12794.RXPDO 16#500+ID-Nodo 1281 1282 ... 1407
156 35008150 12/2018
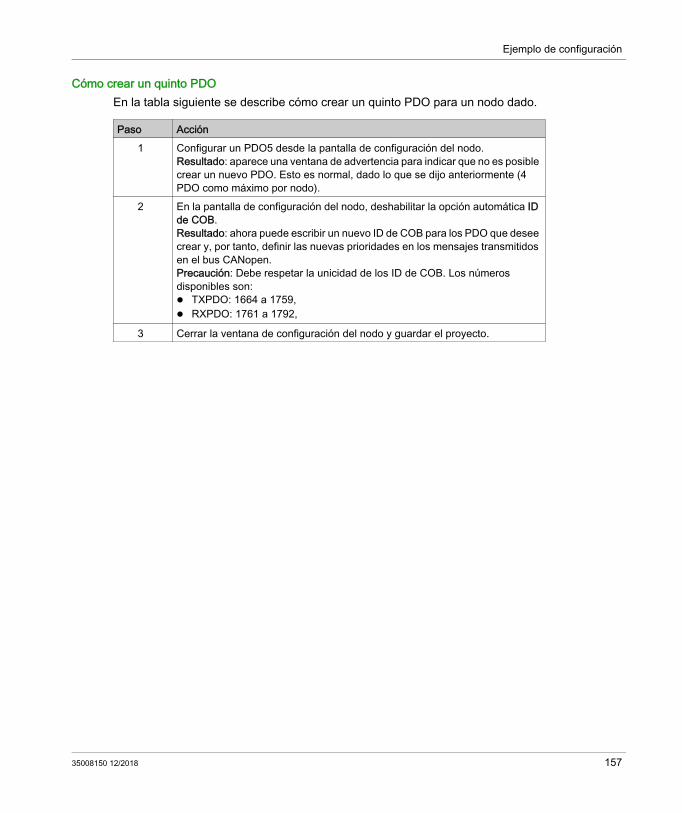
Ejemplo de configuración
Cómo crear un quinto PDOEn la tabla siguiente se describe cómo crear un quinto PDO para un nodo dado.
Paso Acción1 Configurar un PDO5 desde la pantalla de configuración del nodo.
Resultado: aparece una ventana de advertencia para indicar que no es posible crear un nuevo PDO. Esto es normal, dado lo que se dijo anteriormente (4 PDO como máximo por nodo).
2 En la pantalla de configuración del nodo, deshabilitar la opción automática ID de COB.Resultado: ahora puede escribir un nuevo ID de COB para los PDO que desee crear y, por tanto, definir las nuevas prioridades en los mensajes transmitidos en el bus CANopen.Precaución: Debe respetar la unicidad de los ID de COB. Los números disponibles son: TXPDO: 1664 a 1759, RXPDO: 1761 a 1792,
3 Cerrar la ventana de configuración del nodo y guardar el proyecto.
35008150 12/2018 157

Ejemplo de configuración
158 35008150 12/2018
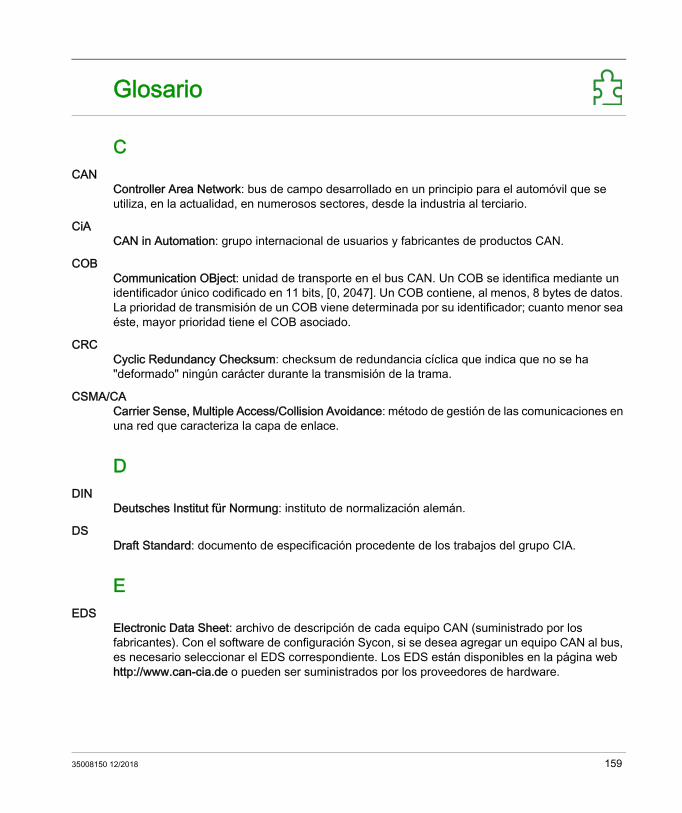
Premium y Atrium con EcoStruxure™ Control ExpertGlosario35008150 12/2018
Glosario
CCAN
Controller Area Network: bus de campo desarrollado en un principio para el automóvil que se utiliza, en la actualidad, en numerosos sectores, desde la industria al terciario.
CiACAN in Automation: grupo internacional de usuarios y fabricantes de productos CAN.
COBCommunication OBject: unidad de transporte en el bus CAN. Un COB se identifica mediante un identificador único codificado en 11 bits, [0, 2047]. Un COB contiene, al menos, 8 bytes de datos. La prioridad de transmisión de un COB viene determinada por su identificador; cuanto menor sea éste, mayor prioridad tiene el COB asociado.
CRCCyclic Redundancy Checksum: checksum de redundancia cíclica que indica que no se ha "deformado" ningún carácter durante la transmisión de la trama.
CSMA/CACarrier Sense, Multiple Access/Collision Avoidance: método de gestión de las comunicaciones en una red que caracteriza la capa de enlace.
DDIN
Deutsches Institut für Normung: instituto de normalización alemán.
DSDraft Standard: documento de especificación procedente de los trabajos del grupo CIA.
EEDS
Electronic Data Sheet: archivo de descripción de cada equipo CAN (suministrado por los fabricantes). Con el software de configuración Sycon, si se desea agregar un equipo CAN al bus, es necesario seleccionar el EDS correspondiente. Los EDS están disponibles en la página web http://www.can-cia.de o pueden ser suministrados por los proveedores de hardware.
35008150 12/2018 159
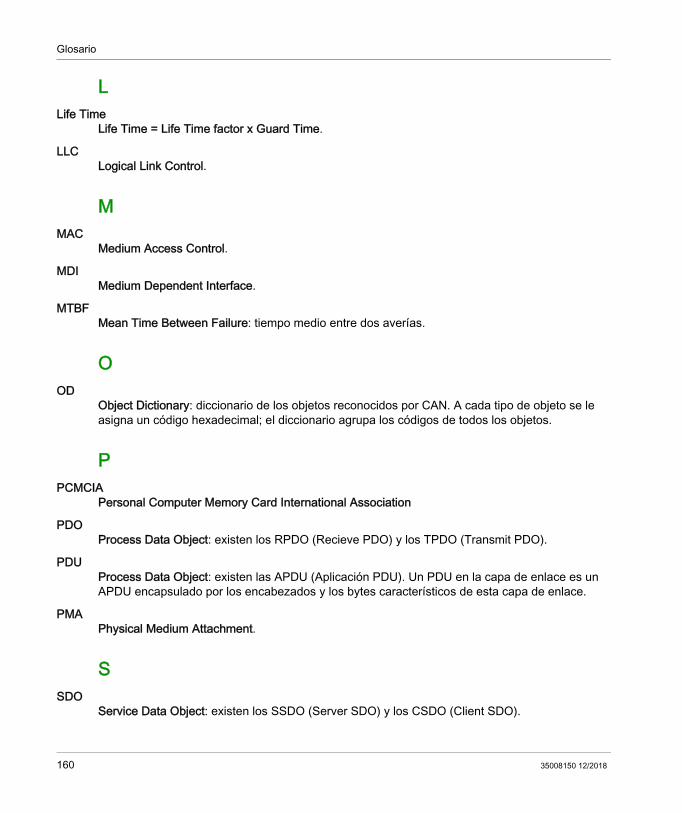
Glosario
LLife Time
Life Time = Life Time factor x Guard Time.
LLCLogical Link Control.
MMAC
Medium Access Control.
MDIMedium Dependent Interface.
MTBFMean Time Between Failure: tiempo medio entre dos averías.
OOD
Object Dictionary: diccionario de los objetos reconocidos por CAN. A cada tipo de objeto se le asigna un código hexadecimal; el diccionario agrupa los códigos de todos los objetos.
PPCMCIA
Personal Computer Memory Card International Association
PDOProcess Data Object: existen los RPDO (Recieve PDO) y los TPDO (Transmit PDO).
PDUProcess Data Object: existen las APDU (Aplicación PDU). Un PDU en la capa de enlace es un APDU encapsulado por los encabezados y los bytes característicos de esta capa de enlace.
PMAPhysical Medium Attachment.
SSDO
Service Data Object: existen los SSDO (Server SDO) y los CSDO (Client SDO).
160 35008150 12/2018

Glosario
TTAP
Transmission Access Point: caja de conexión del bus.
35008150 12/2018 161

Glosario
162 35008150 12/2018
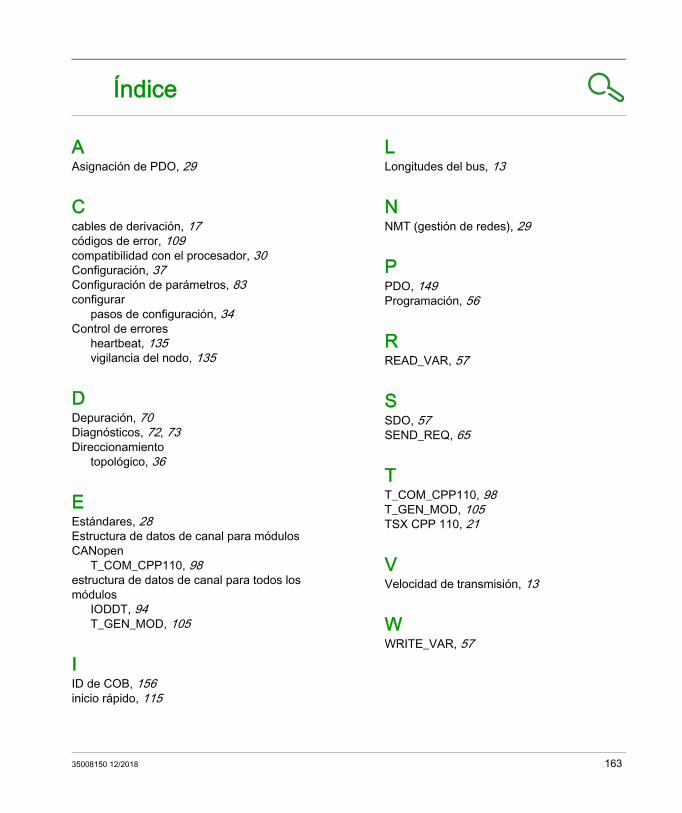
Premium y Atrium con EcoStruxure™ Control ExpertÍndice35008150 12/2018
Índice
AAsignación de PDO, 29
Ccables de derivación, 17códigos de error, 109compatibilidad con el procesador, 30Configuración, 37Configuración de parámetros, 83configurar
pasos de configuración, 34Control de errores
heartbeat, 135vigilancia del nodo, 135
DDepuración, 70Diagnósticos, 72, 73Direccionamiento
topológico, 36
EEstándares, 28Estructura de datos de canal para módulos CANopen
T_COM_CPP110, 98estructura de datos de canal para todos los módulos
IODDT, 94T_GEN_MOD, 105
IID de COB, 156inicio rápido, 115
35008150 12/2018
LLongitudes del bus, 13
NNMT (gestión de redes), 29
PPDO, 149Programación, 56
RREAD_VAR, 57
SSDO, 57SEND_REQ, 65
TT_COM_CPP110, 98T_GEN_MOD, 105TSX CPP 110, 21
VVelocidad de transmisión, 13
WWRITE_VAR, 57
163

Índice
164
35008150 12/2018

















