Preliminary Lander CubeSat Design for Small Asteroid ...1303001/FULLTEXT01.pdf · asteroid to a...
126
IN DEGREE PROJECT VEHICLE ENGINEERING, SECOND CYCLE, 30 CREDITS , STOCKHOLM SWEDEN 2018 Preliminary Lander CubeSat Design for Small Asteroid Detumbling Mission AGNE PASKEVICIUTE KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ENGINEERING SCIENCES
Transcript of Preliminary Lander CubeSat Design for Small Asteroid ...1303001/FULLTEXT01.pdf · asteroid to a...

IN DEGREE PROJECT VEHICLE ENGINEERING,SECOND CYCLE, 30 CREDITS
, STOCKHOLM SWEDEN 2018
Preliminary Lander CubeSat Design for Small Asteroid Detumbling Mission
AGNE PASKEVICIUTE
KTH ROYAL INSTITUTE OF TECHNOLOGYSCHOOL OF ENGINEERING SCIENCES

Preliminary Lander CubeSat Design forSmall Asteroid Detumbling Mission
Agn� Paökevi�i�t�
Department of Aeronautical and Vehicle EngineeringKTH Royal Institute of Technology
This thesis is submitted for the degree ofMaster of Science
October 2018

Skiriu ö˛ darbπ savo mamai Graûinai ir t��iui Algirdui.

Acknowledgements
This thesis would have not been possible without the encouragement and support of numerouspeople in my life.
I would especially like to thank Dr Michael C. F. Bazzocchi for his support and constructiveadvice throughout my research. In addition, I would like to express my gratitude to researchers,professors and sta� at Luleå University of Technology, Space Campus, for their ideas and helpin practical matters.
I would like to sincerely thank my family, boyfriend, and friends for believing in me, encour-aging me to reach for my dreams, and loving me without any expectations.
Last but not least, I am truly grateful for the opportunities KTH Royal Institute of Technol-ogy provided.

Sammanfattning
Gruvdrift på asteroider förväntas att bli verklighet inom en snar framtid. Det första steget äratt omdirigera en asteroid till en stabil omloppsbana runt jorden så att gruvteknik kan demon-streras. Bromsning av asteroidens tumlande är en av de viktigaste stegen i ett rymduppdragdär en asteroid ska omdirigeras. I detta examensarbete föreslås en preliminär asteroidlandarebaserad på CubeSat-teknik för ett rymduppdrag där en asteroid ska omdirigeras.
En asteroid av Arjuna-typ, 2014 UR, med en diameter på mellan 10.6 och 21.2 m är valdsom kandidat för rymduppdraget. På grund av att asteroidens är relativt liten till storlek måstelandningen utföras med en aktiv reglermetod och rymdfarkosten måste förankras till asteroiden.Med hjälp av en beslutsmetod utifrån flera mål, PROMETHEE, identifierades förankringsme-toden “mikro-ryggrads-gripare” som den mest lämpliga.
Tre huvuduppgifter för rymduppdraget identifierades under designprocessen: dataflödemellan landaren och moderfarkosten, Delta-V-budgeten och peknoggrannheten. Delta-V somkrävs för landning på asteroiden uppskattas att vara högst 10 m/s. Bromsningen av tumlandetkostar högst 15 m/s. Osäkerheten med Delta-V för bromning av tumlandet beror på olika up-pskattningar av asteroidens storlek. Den nödvändiga minsta peknoggrannheten uppskattadesvara 6°.
Utformningen av landaren, baserade på CubeSat-teknik, använder till största delen kom-ponenter som finns på hyllan, s.k. commercial-o�-the-shelf. Det visas att en CubeSat-landareinte kan bromsa tumlandet för en asteroid som roterar snabbt kring flera axlar. Om den valdaasteroiden roterar runt en axel med en rotationsperiod på 2.4 timmar, är det möjligt att bromsatumlandet med endast 1.5 kg drivmedel. Den föreslagna landaren är en 12U CubeSat med entotal massa på 15 kg och strömförbrukning på 65 W.

Abstract
Asteroid mining is expected to become reality in the near future. The first step is to redirect anasteroid to a stable Earth orbit so that mining technologies can be demonstrated. Detumblingof the asteroid is one of the important steps in asteroid redirection missions. In this thesis, apreliminary lander CubeSat design is suggested for a small asteroid detumbling mission.
The candidate asteroid for the detumbling mission is chosen to be 2014 UR, an Arjuna-type asteroid with an estimated diameter ranging from 10.6 to 21.2 m. Due to the small sizeof the asteroid, the landing must be performed with an active control method after which thespacecraft must be firmly anchored to the asteroid. By using the multi-criteria decision mak-ing method PROMETHEE, the microspine gripper is chosen as the most suitable anchoringmechanism.
Three main mission drivers are identified during the design process: data-flow betweenthe lander and the mothership, Delta-V budget and pointing accuracy. The Delta-V requiredfor landing on the asteroid and despinning it is estimated to be 10 m/s and 0.15 m/s at most,respectively. The uncertainty with the despinning Delta-V is due to varying estimates of thesize of the asteroid. The required minimum pointing accuracy is estimated to be 6�.
The preliminary lander CubeSat design can be largely realised with commercial o�-the-shelf components suggested in this work. Only some of the components have to be custombuilt or the technologies further developed. It is shown that a CubeSat lander is not able todetumble an asteroid that is rotating fast around multiple axis. However, if the consideredasteroid is rotating around a single axis with a rotational period of 2.4 h, it is be possible todespin it by spending just 1.5 kg of propellant. The suggested lander is a 12U CubeSat with anoverall mass of 15 kg and power consumption of 65 W.

Contents
List of Figures ix
List of Tables xi
Nomenclature xiii
1 Introduction 11.1 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Preliminary Mission Description . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Thesis Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Target Asteroid 62.1 Spectral Types of Asteroids . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 Near-Earth Asteroids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Asteroid 2014 UR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Spectral Type of 2014 UR . . . . . . . . . . . . . . . . . . . . . . . 112.3.2 Surface Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Forces Acting on The Landed Spacecraft 133.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Gravitational Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Solar Radiation Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.4 Electrostatic Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.5 Centrifugal Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.6 Despinning Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.7 Net Force Acting on The Spacecraft . . . . . . . . . . . . . . . . . . . . . . 21

Contents vii
4 Landing Systems Review and Choice 234.1 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.1 Active Descent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.1.2 Passive Descent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2 Landing Mechanism Selection . . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Anchoring Systems Review 295.1 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.1.1 Slow Anchoring Methods . . . . . . . . . . . . . . . . . . . . . . . 305.1.2 High-Speed Anchoring Methods . . . . . . . . . . . . . . . . . . . . 32
5.2 Criteria for Successful Anchoring . . . . . . . . . . . . . . . . . . . . . . . 375.3 Discussion of Suitable Anchoring Systems . . . . . . . . . . . . . . . . . . . 37
5.3.1 Summary of Anchoring Systems Candidates . . . . . . . . . . . . . 38
6 Anchoring System Choice Using MCDM 416.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.2 Criteria Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.3 Criteria Weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.3.1 Optimal Pairwise Comparison . . . . . . . . . . . . . . . . . . . . . 476.3.2 Weights of Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.4 Method of Aggregation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.4.1 PROMETHEE Method . . . . . . . . . . . . . . . . . . . . . . . . . 526.4.2 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7 Primary Mission Drivers 577.1 Mission Data-Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577.2 Delta-V Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
7.2.1 Sphere of Influence . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.2.2 Delta-V Estimation: Docking . . . . . . . . . . . . . . . . . . . . . . 607.2.3 Delta-V Estimation: Despinning . . . . . . . . . . . . . . . . . . . . 62
7.3 Pointing accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8 Preliminary Spacecraft Design 648.1 Attitude and Orbit Control Subsystem . . . . . . . . . . . . . . . . . . . . . 64
8.1.1 Actuators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658.1.2 Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
8.2 Propulsion Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69

Contents viii
8.2.1 Propellant Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . 698.2.2 Subsystem Choice . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8.3 Anchoring Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 748.4 Communications Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . 758.5 Other Subsystems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
8.5.1 Command and Data Handling Subsystem . . . . . . . . . . . . . . . 768.5.2 Thermal Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . 778.5.3 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
8.6 Power Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 778.7 Mass and Power Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
9 Conclusion 81
Bibliography 84
Appendix A Technology Readiness Levels 91
Appendix B Multi-Criteria Decision Making 92B.1 Pairwise Comparison of Anchoring Criteria . . . . . . . . . . . . . . . . . . 92B.2 MATLAB Script for Pairwise Di�erence Comparison . . . . . . . . . . . . . 97B.3 PROMETHEE Preference Functions and Parameters . . . . . . . . . . . . . 100
Appendix C Clohessy-Wiltshire Equations 103C.1 Coordinate System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103C.2 Equations of Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Appendix D Preliminary Design & Subsystems 106D.1 Moment Arm & Moment of Inertia . . . . . . . . . . . . . . . . . . . . . . . 106

List of Figures
1.1 Operational concept sketch. Adapted from Probst and Förstner [1]. . . . . . . 5
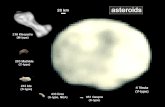
2.1 Three subgroups of NEAs and their orbits with respect to Earth’s orbit aroundthe Sun [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.1 Schematic diagram showing the lander on the surface of asteroid with the mainnatural forces acting on it. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Resultant centrifugal force distribution on asteroid 2014 UR for the worst casescenario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Best case scenario force and time required for despinning the asteroid. . . . . 193.4 Landing location and direction of forces required for despinning the asteroid
in the worst case scenario. . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.5 Worst case scenario force and time required for despinning the asteroid. . . . 21
4.1 GRASP lander developed by SFL [3]. . . . . . . . . . . . . . . . . . . . . . 244.2 Spinning lander concepts suggested by SCSG. . . . . . . . . . . . . . . . . . 254.3 Surface mobility mechanisms patented by University of California [4]. . . . . 264.4 MASCOT mobility concept - eccentric arm concept [5]. . . . . . . . . . . . 27
5.1 Sample self-opposing drill systems [6] . . . . . . . . . . . . . . . . . . . . . 315.2 Experimental setup of robotic arm presenting anchoring technology based on
sawing method [7]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.3 Left: NASA JPL microspine grippers being tested for anchoring strength at
45�. Right: CAD view of microspine gripper cross-section [8, 9]. . . . . . . . 335.4 Telescoping spike anchoring system [10]. . . . . . . . . . . . . . . . . . . . 345.5 Telescoping spike system for ST4/Champollion mission [10]. . . . . . . . . . 355.6 Tethered spike anchoring system [10]. . . . . . . . . . . . . . . . . . . . . . 365.7 Philae harpoon anchoring system mounted in the landing gear [11]. . . . . . . 365.8 Magnetic anchoring concept “Harvestor” by Deep Space Industries [6]. . . . 37

List of Figures x
6.1 Flowchart for the MCDM methodology. . . . . . . . . . . . . . . . . . . . . 42
7.1 Data-flow diagram for asteroid detumbling mission. Round shapes denote datasource, rectangles denote tasks, hexagon denotes data end user. . . . . . . . . 58
7.2 Delta-V required to dock with asteroid 2014 UR versus rendezvous time. . . . 617.3 Scheme for estimating required maximum pointing angle to the asteroid 2014 UR,
just after spacecraft release from the mothership. . . . . . . . . . . . . . . . 63
8.1 Attitude control motion in two dimensions [12]. . . . . . . . . . . . . . . . . 668.2 Propellant required for docking with the asteroid 2014 UR for di�erent space-
craft sizes and di�erent specific impulses. . . . . . . . . . . . . . . . . . . . 708.3 Comparison of propellant required for despinning fast spinning and slow spin-
ning asteroid 2014 UR for di�erent specific impulses. . . . . . . . . . . . . . 71
C.1 Coordinate-System Geometry for Relative Motion [13]. . . . . . . . . . . . . 103

List of Tables
2.1 Orbital parameters of NEA groups [2, 14]. . . . . . . . . . . . . . . . . . . . 72.2 List of identified Arjuna-type asteroids and their parameters (May, 2018) [15]. 92.3 Di�erent materials representation of S-type, V-type, Q-type, and C-type aster-
oids. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1 Net force and list of separate forces acting on the landed spacecraft in the nor-mal direction to the asteroid surface. . . . . . . . . . . . . . . . . . . . . . . 22
5.1 Criteria for selecting suitable anchoring system. . . . . . . . . . . . . . . . . 395.2 Parameters of anchoring sub-systems. . . . . . . . . . . . . . . . . . . . . . 40
6.1 Maximum power available for di�erent CubeSat platforms. . . . . . . . . . . 436.2 Points corresponding to volume, mass and power that anchoring system requires. 446.3 Numerical criteria for each alternative. . . . . . . . . . . . . . . . . . . . . . 466.4 Similarity Scale proposed by Triantaphyllou. . . . . . . . . . . . . . . . . . . 476.5 Matrix of pairwise di�erence comparisons of criteria. . . . . . . . . . . . . . 486.6 Closest Discrete Pairwise (CDP) matrix (after re-arrangement). . . . . . . . . 486.7 Real Discrete Pairwise (RDP) matrix. . . . . . . . . . . . . . . . . . . . . . 496.8 Weights of each criterion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 506.9 Information about each criteria in order to use PROMETHEE outranking method. 536.10 Global preference matrix for all alternatives. . . . . . . . . . . . . . . . . . . 546.11 Positive and negative outranking flows for all alternative anchoring systems. . 556.12 Complete ranking of anchoring systems alternatives. . . . . . . . . . . . . . 56
8.1 Mass and power budget for AOC subsystem. . . . . . . . . . . . . . . . . . . 658.2 Mass and power budget for propulsion subsystem (considering best case spin-
ning asteroid scenario). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 698.3 Comparison of di�erent propulsion systems performance for the best case sce-
nario [16–21]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73

List of Tables xii
8.4 Mass and power budget for anchoring subsystem. . . . . . . . . . . . . . . . 758.5 Mass and power budget for communications subsystem. . . . . . . . . . . . . 758.6 Mass and power budget for C&DH subsystem, thermal subsystem and space-
craft structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 768.7 Mass budget for power subsystem. . . . . . . . . . . . . . . . . . . . . . . . 788.8 Total power requirement for each of the three mission phases. . . . . . . . . . 798.9 Total mass and power budget. . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.1 Technology readiness levels according to NASA. . . . . . . . . . . . . . . . 91
B.1 Verbal and numerical pairwise comparison of each criterion. . . . . . . . . . 92B.2 Types of generalised criteria. . . . . . . . . . . . . . . . . . . . . . . . . . . 101B.3 Function choice for each criterion. . . . . . . . . . . . . . . . . . . . . . . . 102
D.1 Moment arm and moment of inertia for each CubeSat configuration rotatingaround an axis by firing two thrusters, as denoted in the schemes. . . . . . . . 106

Nomenclature
Roman Symbols
AAA matrix with coe�cients from CDP matrix
A area
a semi-major axis
c speed of light, = 299,792,458 m/s
d di�erence between two alternatives
d diameter
e eccentricity
Ek kinetic energy
F force
f function
G gravitational constant, ⇡ 6.674⇥10�11 m3 kg-1 s-2
g criteria
g gravity
H absolute magnitude
I impulse
I moment of inertia
i inclination

Nomenclature xiv
Ibit minimum impulse bit
k total number of alternatives
l moment arm
m mass
n number of constraints
ne electron density
P power
P preference of one alternative over another
p preference function threshold parameter of strict preference
p pressure
P period of rotation
pv albedo
c elementary charge, = 1.602⇥10�19 C
Q apogee
q perigee
q preference function threshold parameter of indi�erence
r radius
T thrust
t time
V velocity
V volume
W solar constant, = 1362 W/m2
W weight of criteria
w predicted value of pairwise comparison of weights between two criteria

Nomenclature xv
X error factor
Greek Symbols
a angular acceleration
a real value of pairwise comparison of weights between two criteria
lll vector with Lagrangian coe�cients
µ standard gravitational parameter
w angular velocity
F electric potential
f outranking flow value
p normalised preference of one alternative over another
r density
t torque
q pointing accuracy half angle
Subscripts
0 initial value
a asteroid
cent centrifugal
el electrostatic
f final
grav gravitational
i number of criterion/alternative
j number of criterion/alternative
prop propellant
rad solar radiation

Nomenclature xvi
sc spacecraft
sp specific
Other Symbols
DV change in velocity
Acronyms / Abbreviations
AOC Attitude and Orbit Control
ARM Asteroid Retrieval Mission
AU Astronomical Unit, ⇡ 150 million km
C&DH Command and Data Handling
CDP Closest Discrete Pairwise matrix
COTS Commercial O�-The-Shelf
ESA European Space Agency
JAXA Japan Aerospace Exploration Agency
LCDB Light Curve Database
MATLAB multi-paradigm numerical computing environment and proprietary programminglanguage developed by MathWorks
MCDM Multi-Criteria Decision Making
MVP Mass, Volume, Power
NASA National Aeronautics and Space Administration
NEA Near-Earth Asteroid
PROMETHEE Preference Ranking Organisation Method for Enrichment of Evaluations
RDP Real Discrete Pairwise matrix
SOI Sphere of Influence
TRL Technology Readiness Level
U CubeSat Unit, 1 unit measures 10⇥10⇥10 cm3

Chapter 1
Introduction
Already in 1903 Konstantin Tsiolkovsky in his article “Exploration of Cosmic Space by Meansof Reaction Devices” recognised asteroids as potential treasures and listed their exploitation asone of the key points for space conquest [22]. As ambitious as it sounds, with the rapidlyimproving pace of technology development, asteroid mining is soon to be reality. It also mightbecome the biggest game-changer in economic history [23]. For instance, a 500 m diameterplatinum-rich asteroid contains about 174 times the yearly output of platinum on Earth [24].Furthermore, asteroids rich in volatiles can provide water, which is essential for life supportsystems, especially in long-term human flight missions. Also, water molecules can be splitinto hydrogen and oxygen which can be used as rocket fuel. Finally, extraction of necessarymaterials from bodies in space means that less mass has to be launched from the Earth, whichreduces the launch costs. Thus, it is clear that asteroids could provide with resources essentialfor further space exploration, as well as benefit life on Earth.
1.1 Literature Review
Numerous missions have already been planned, and some executed, for studying and charac-terising asteroids by both national space agencies (JAXA, NASA, ESA) and private companies(such as Planetary Resources [25]). Understanding the characteristics and composition of theasteroids, having experience in approaching, landing, and operating on them is extremely valu-able when preparing for future mining missions. So far, already four missions have been exe-cuted to asteroids and one to the comet. The first spacecraft to land on an asteroid was NEAR(Near-Earth Asteroid Rendezvous) Shoemaker [26]; in 2001 the 800 kg spacecraft landed onthe asteroid Eros, which is 16.8 km in diameter. Originally, the spacecraft was not designedto land on the asteroid, but the decision to land was made after all science objectives werereached, and the spacecraft was still operational with approximately 36 m/s of DV left. One

1.1 Literature Review 2
of the reasons to land was a possibility of getting even higher resolution images of the surfaceof Eros. In 2005, the Hayabusa spacecraft reached asteroid Itokawa, which is 550 m alongits longest axis [27]. The gravity of Itokawa allowed to enable hopping motion of the small0.5 kg spacecraft lander MINERVA. Touch-and-go sequence was adapted, which meant thelander was supposed to stay on the surface for 1–2 seconds before hopping to another location.However, by mistake MINERVA was released while Hayabusa was ascending for its automaticstation keeping manoeuvre. The lander escaped Itokawa’s gravitational pull due to the releaseat too high altitude. Nonetheless, Hayabusa spacecraft still managed to land successfully andremained on the asteroid’s surface for half an hour [28]. Just recently, Hayabusa2 spacecraftapproached the almost 1000-m-in-diameter asteroid Ryugu and in October, 2018, it will releaseits main lander MASCOT. Asteroid lander MASCOT developed by DLR (German AerospaceCentre) [5, 29] is an 11 kg CubeSat. Hayabusa2 is not orbiting the asteroid, but is hoveringabove it, always facing the Earth. MASCOT acts as an autonomous spacecraft by: makingattitude correction decisions, activating scientific instruments, actuating hopping mechanismto reach di�erent asteroid sites, monitoring and managing system energy and failures. In or-der to increase the success rate of the mission, MASCOT electronics are fully redundant. Thedesign goal for the lander was to enable it to operate on the surface for up to two asteroiddays (spinning period of Ryugu is 7.63 h). OSIRIS-REx by NASA is another spacecraft cur-rently on its way to an asteroid. The target asteroid, Bennu, is around 500 m in diameter. Thespacecraft does not contain a lander. It is itself responsible for reaching the asteroid, collect-ing samples and carrying them back to Earth. It adopts touch-and-go mission sequence andwill touch the surface of the asteroid in order to collect the sample, and then will move awayfrom it. Finally, only one mission has been executed to a comet: Rosetta, developed by ESA.The first landing on the comet was accomplished in 2014. Rosetta lander Philae landed onthe comet 67P/Churyumov-Gerasimenko (which is 4.3 km in its longest dimension) [30]. Allfive missions were planned to relatively large bodies, which enabled to utilise their gravity forlanding procedures. Thus, none of the spacecraft employed thrusters for full attitude control,and landed in hopping motion.
Lessons learnt from the missions described above help to prepare for the next step in aster-oid mining: redirecting an asteroid to the vicinity of the Earth. Having an asteroid, or a boulderfrom an asteroid, in Earth’s or Moon’s orbit will allow for cheaper and faster testing of asteroidmining technologies in real environment. Few missions have already been proposed for redi-recting an asteroid, for instance the famous Asteroid Redirect Mission (ARM) by NASA. ARMwas supposed to be launched in 2021, but was cancelled due to budget constraints. The goal ofthe mission was to return a boulder from an asteroid to stable orbit around the Moon [31]. Asingle spacecraft architecture would have been utilised. Five key functions for asteroid capture

1.2 Motivation 3
would have had to be performed: 1) asteroid and boulder mapping and characterisation; 2)onboard asteroid- and boulder-relative navigation; 3) asteroid surface interaction; 4) bouldercapture; 5) boulder restraint during redirection.
Instead of returning a boulder from an asteroid, several missions were proposed for re-turning the whole asteroid. However, many asteroids which are close to Earth and are smallenough to be potential candidates for redirection missions, have high rotation rates [32]. Be-fore redirecting such asteroids towards the Earth, they have to first be despun (or detumbled),which is one of the critical steps in asteroid retrieval mission. Brophy et al. in 2012 proposeda mission for returning a whole asteroid of 7 m in diameter [33]. Both single and separablespacecraft architectures were suggested in order to return a near-Earth asteroid to the vicinityof the Earth. A deployable bag would be utilised for capturing and detumbling the asteroid.The deployable bag includes arms which are connected by circumferential hoops. After de-ployment, the hoops would provide compressive force to hold the bag open. For a 6⇥12 m2
asteroid, the bag would measure 10⇥15 m2. In order to capture the asteroid, its spin and tum-bling rate would first need to be matched with the spacecraft. After the velocity and spin rate ofthe asteroid is matched, the asteroid is captured into the bag. Then the spacecraft and asteroidsystem is detumbled using a reaction control system. In 2014 Grip et al. suggested a spider-web capture mechanism for NASA’s ARM mission [34]. Di�erently to the proposed conceptby Brophy et al., this concept does not require for the spacecraft to match asteroid’s spinningrate, which results in lower overall fuel requirements. Instead, the spacecraft approaches theasteroid along its inertial vector. Spider-web capture mechanism is based on 6 robotic limbsattached to the spacecraft, which form a large barrel, surrounding the target asteroid. The cinchlines, connecting robotic limbs in di�erent planes, can be tightened by a drawstring baggingmechanism. This makes the limbs close around the asteroid, similarly to how a conventionalgarbage bag is closed. The asteroid will then be despun, by dissipating the energy through thelimbs. Finally, Tethers Unlimited developed a tethered system for despining an asteroid called“Weightless Rendezvous And Net Grapple to Limit Excess Rotation” (WRANGLER) [35]. Itis a technique for capturing and despinning an asteroid with a lightweight mesh structure. Itworks by converting asteroid’s angular momentum into spacecraft’s angular momentum, asit revolves around the asteroid. Then spacecraft is released, and detumbled asteroid can beredirected with a mothership.
1.2 Motivation
As described above, one of the main challenges concerning an asteroid redirection mission isasteroid detumbling. Although mission concepts similar to the ARM mission suggest redi-

1.3 Preliminary Mission Description 4
recting only the boulder from a larger asteroid this way avoiding the detumbling problem, ingeneral such missions are not necessarily seen as less complicated than the ones consideringredirection of the whole asteroid. Di�erent challenges are introduced: more thorough charac-terisation of the asteroid is required in order to select a boulder of appropriate size and mass;necessity for precise and fully controlled landing on the asteroid; large and complex capturemechanism requiring to safely bring the boulder to the vicinity of the Earth.
An alternative to capturing a boulder from a large asteroid is redirecting a whole of a smallasteroid, as explained in the previous section. All three: deployable bag, spider-web mech-anism, and tethered WRANGLER systems are developed as alternatives to using spacecraftthrusters, in order to minimise fuel consumption when despinning larger asteroids [36]. How-ever, Bazzocchi and Emami showed that detumbling a typical 10 m in diameter near-Earthasteroid would require only 1 kg of fuel, considering an engine with 3000 s of specific impulse[37]. Thus, fuel requirements for detumbling should be of no major concern, when small aster-oids are considered. Moreover, thrusters used for detumbling an asteroid, could later be usedfor attitude control during the redirection.
Single spacecraft and separable spacecraft architectures are both considered for deep spacemissions when landing on the body is included. Though single spacecraft typically has lowercost since only one spacecraft needs to be developed [33], separable spacecraft architecturewould most likely provide easier landing procedure and more robust communication with theEarth. Landing a small lander is easier than a big spacecraft with its large solar panels andpowerful propulsion subsystem. Moreover, if the mothership is always facing the Earth, contactwith the Earth can always be maintained by using the mothership as a relay spacecraft. Finally,in order to reduce the cost of the double spacecraft architecture, the lander could be designedas a CubeSat by using commercial o�-the-shelf components (COTS) [38].
Therefore, the aim of this study is to suggest a preliminary design of a CubeSat lander forsmall asteroid detumbling mission, assuming the lander is carried to the vicinity of the asteroidinside the mothership.
1.3 Preliminary Mission Description
Asteroid detumbling mission sequence can be divided into three major steps: identificationof the asteroid, landing on the asteroid, detumbling the asteroid. First, asteroid is detected bythe mothership. Then, at a predefined distance from the asteroid, the lander spacecraft can bereleased. Either autonomously, or according to the instructions sent by the mothership, thelander lands on the predetermined location of the asteroid, and anchors itself to its surfaceto avoid drifting away. Before landing, the spacecraft has to match the spinning rate of the

1.4 Thesis Overview 5
asteroid, so that it constantly sees the same side of it. When the lander is securely attached to theasteroid, the detumbling procedure can be started. The steps for the detumbling procedure caneither be calculated by the mothership by analysing asteroid’s tumbling rate and knowing thelocation of the lander, or by the lander itself. Detumbling is performed by firing the thrustersmounted on the lander. Detumbling mission ends when the angular velocity of the asteroidaround each axis is zero, or close to zero. An overview of operational concept is given inFig. 1.1.
1.4 Thesis Overview
First, a suitable asteroid candidate for detumbling mission is chosen in Chapter 2. The forceneeded for the spacecraft to detumble the asteroid is estimated in Chapter 3. The landing andanchoring mechanisms for the lander spacecraft are reviewed and selected in Chapters 4,5 and6. Finally, the main drivers for preliminary spacecraft design are presented in Chapter 7, andsubsystems selected in Chapter 8.
Figure 1.1 Operational concept sketch. Adapted from Probst and Förstner [1].

Chapter 2
Target Asteroid
Asteroid populations in the inner Solar System can be categorised within the following groups:asteroid belt, trojans, and near-Earth asteroids (NEAs). Most of the asteroids can be found inthe asteroid belt, which is between the orbits of Mars and Jupiter. Trojans are asteroids whichreside on one of the Lagrangian points (L4 and L5) of larger planet or moon’s orbit. So far onlyone Earth trojan has been found, oscillating about Sun-Earth L4 Lagrangian point. However,theoretical estimation is that there should be few hundred of Earth trojans [39]. NEAs comeinto close proximity with Earth, or intersect its orbit. They are categorised by a periheliondistance of less or equal to 1.3 AU.
When choosing a suitable asteroid candidate, the requirements for selection go beyondthe goal of this study of asteroid detumbling. This mission can only be feasible if asteroid isaccessible from the Earth and is suitable for redirection. For both accessibility and redirec-tion purposes, the greatest driver for asteroid selection is velocity increment requirement. Thesmaller change in velocity is needed for reaching and redirecting the asteroid, the lower mis-sion costs and mission execution time are. Therefore, NEAs are the most attractive group ofasteroids for such mission. Main belt asteroids are much further away compared to NEAs, andthe only Earth trojan is at a very di�erent inclination compared to the Earth’s orbit.
2.1 Spectral Types of Asteroids
Asteroids are classified by several factors, including their composition and assigned spectraltypes, mainly based on their colour, albedo, and emission spectrum. The main observed as-teroid spectral types are S-type and C-type. Around 75% of all known asteroids in the SolarSystem fall into C-type group [2]. C-type asteroids are carbonaceous dark objects with theiralbedos ranging from 0.03 to 0.10, they dominate the outer belt population. The second biggestgroup of asteroids is S-type asteroids, which dominate the inner asteroid belt population. They

2.2 Near-Earth Asteroids 7
mainly consist of iron- and magnesium- silicates, and comprise about 17% of all known aster-oids. S-type asteroids are brighter than C-type, with their albedos ranging from 0.10 to 0.22[2].
Common asteroid spectral type populations are X-type, V-type, and Q-type. X-type aster-oids are further classified into the following subtypes, by their albedos: E-type (pv > 0.30),M-type (0.30 � pv � 0.10), and P-type (pv < 0.10). M-type is the most commonly foundgroup of asteroids within X-type classification. M-type is associated with metallic meteorites,mostly made up from nickel-iron [40]. V-type asteroids are similar to S-type asteroids by hav-ing basaltic properties [41]. Spectrum of Q-type asteroids is generally between V-type andS-type. By composition, Q-type asteroids are similar to ordinary chondrite meteorites [42].
For the purpose of asteroid mining, the most interesting asteroids are C-type and M-type.C-type asteroids are very interesting to explore due to the high concentration of volatiles thatcan be extracted for fuel production, or life support systems [24]. Moreover, due to the lowermechanical strength, such asteroid type is easier to cut or crush, which therefore should makeanchoring process easier [33]. M-type asteroid could be used for material extraction whichcould then be returned to the Earth, or used for building space structures. An average M-typeasteroid contains more platinum group metals than the richest known ore bodies in Earth [23].
2.2 Near-Earth Asteroids
Near-Earth asteroids can be further classified into four groups. The first group consists ofthe asteroids coming in close proximity to the Earth’s orbit (Amor-type). The second andthird groups consists of the asteroids that actually cross Earth’s orbit (Apollo-, and Aten-typeasteroids). Their orbits relative to Earth’s orbit can be seen in Fig. 2.1 [2]. The fourth groupconsists of Atira-type asteroids. Atira-type asteroids orbit inside the Earth’s orbit, but do notcross it. Refer to Table 2.1 for a summary of orbital elements. NEAs can also change theirclassification in time as their orbits get perturbed by other planets.
Table 2.1 Orbital parameters of NEA groups [2, 14].
Semi-Major Axis, a Apogee, Q Perigee, q
Amor � 1 AU 1.017 q 1.3 AUApollo � 1 AU 1.017 AUAten 1 AU � 0.9833 AUAtira 1 AU 0.9833 AU

2.2 Near-Earth Asteroids 8
Figure 2.1 Three subgroups of NEAs and their orbits with respect to Earth’s orbit around theSun [2].
Arjuna-type Asteroids
There is also an uno�cial classification of NEAs: Arjuna-type asteroids. Arjuna-type asteroidsorbital parameters merge with Aten and Atira groups – their semi major axis is 0.985 a 1.013 AU. Eccentricity, e, and inclination, i, range within 0 < e < 0.1 and 0� < i < 8.56�
respectively. Since inclination and eccentricity are low, the semi-major axis is almost the sameas Earth’s orbit, DV required for reaching such asteroids is also low. Therefore, Arjuna-typeasteroids are seen as the best possible targets for asteroid exploration missions [14].
As of May 2018, approximately 18,000 NEAs have been discovered using various auto-matic asteroid survey programmes [43]. Out of them, 19 are identified as Arjuna-type asteroids(the list is provided in Table 2.2).
Orbital and Physical Parameters
The asteroids are described in physical and orbital parameters. Some of the parameters listedin Table 2.2 are semi-major axis (a), eccentricity (e), inclination (i), absolute magnitude (H),and synodic rotation period of the asteroid (Pa). The data in Table 2.2 is collected from theHORIZONS system provided by Solar System Dynamics Group of Jet Propulsion Laboratory[43]. Parameters are automatically updated to the system few times a year, either from theLight Curve Database (LCDB; Warner et al., 2009), or manually from miscellaneous sources.Parameters listed near asteroid names marked with a star in Table 2.2 are provided from LCDB.
Absolute magnitude is a parameter associated with an object’s intrinsic brightness. If theobject’s albedo is known, its absolute magnitude can be converted to its size using the relation-

2.2 Near-Earth Asteroids 9
Table 2.2 List of identified Arjuna-type asteroids and their parameters (May, 2018) [15].
a (AU) e (-) i (�) H (-) d⇤⇤a (m) Pa (h)
2014 EK24* 1.008 0.070 4.81 23.3 48.5 – 96.9 0.09782003 YN107 0.989 0.014 4.32 26.5 11.1 – 22.22006 JY26 1.010 0.083 1.44 28.4 4.6 – 9.32006 RH120* 1.002 0.035 1.09 29.5 2.8 – 5.6 0.0458 (0.0229)2008 KT 1.011 0.085 1.98 28.2 5.1 – 10.12008 UC202 1.011 0.069 7.45 28.3 4.8 – 9.72009 BD* 1.010 0.042 0.38 28.1 5.43 – 10.62009 SH2* 0.991 0.094 6.81 24.9 23.3 – 46.4 1.262010 HW20 1.011 0.050 8.19 26.1 13.3 – 26.72012 FC71 0.988 0.088 4.94 25.2 20.2 – 40.42012 LA11 0.987 0.096 5.13 26.1 13.3 – 26.72013 BS45 0.992 0.084 0.77 25.9 14.6 – 29.32014 QD364 0.986 0.041 4.01 27.2 8.0 – 16.12014 UR* 0.996 0.016 8.25 26.6 10.6 – 21.2 2.372016 GK135 0.988 0.087 3.16 28.1 5.3 – 10.62017 UO7 1.011 0.100 7.86 26.8 9.7 – 19.32017 YS1 0.994 0.053 5.54 28.9 3.7 – 7.42018 ER1 1.007 0.092 6.44 25.6 16.8 – 33.62018 FM3 1.012 0.091 4.57 27.2 8.0 – 16.1
* – data provided by LCDB [44].** – estimated value (estimation procedure explained in the text).
ship in Equation (2.1) [44].
da = 1329⇤ 10�0.2Hppv
, (2.1)
where da is the object’s diameter in km, and pv is the geometric albedo. Geometric albedo isnot known for most asteroids, however it is estimated that the majority of NEAs have geometricalbedo ranging between 0.09 and 0.36 [45].
Lightcurve data shows measurements of the brightness change over time. From the datathe object’s physical parameters can be estimated, such as rotational states of the asteroid. Itcan also be determined whether the asteroid is tumbling or spinning around a principal axis.In literature tumbling is also sometimes called non-principal axis (NPA) rotational motion. Atumbling asteroid does not return to the same state after a single period. In order to determinewhether the asteroid is tumbling or spinning about a principal axis, lightcurves must be suf-

2.3 Asteroid 2014 UR 10
ficiently detailed and cover enough cycles, so that it could be concluded whether the body isstrictly periodic with a single rotation frequency [46].
None of asteroids with estimated rotation period in Table 2.2 above have been assigned astumbling or spinning asteroids. The importance of knowing whether the asteroid is spinningor tumbling is further explained in Section 3.6. Data collected of asteroid 2014 EK24 duringits close approaches with Earth in 2014, 2015, and 2016 was not enough to determine whetherthe asteroid is spinning around its principal axis [44]. Asteroid 2006 RH120 was observedduring four consecutive nights in 2007, gathering lightcurve data from approximately 4 h ofmeasurements in total. Interestingly, from observational data two di�erent solutions, using4th and 6th order Fourier series for a rotational period, were derived: P1 = 1.375 ± 0.001min and P2 = 2.750 ± 0.002 min. Again, due to the lack of observational data it was notconcluded whether the asteroid is tumbling or not. Lightcurve data collected by Ryan regardingasteroid 2009 SH2 was not published, so the asteroid was not assigned to the tumbling orspinning asteroid list [44]. Data collected by Warner in 2014 regarding asteroid 2014 URallowed estimation of a period of 2.37 hours. Warner claimed it cannot be concluded the resultto be final, and the result should be considered as doubtful [47]. The body is not assigned tospinning or tumbling asteroids list.
Spectral Types of Arjuna-type Asteroids
The true size distribution and albedo of Arjuna-type asteroids is not known. Lin et al. in2018 prepared a photometric survey and taxonomic identifications of 92 NEAs [48]. The ob-servations were performed in Taiwan from 2012 through 2014. The measurements includeddi�erent colour indices of the asteroids which were brighter than 0.19 (albedo), which allowedto classify them within di�erent compositional types. Most of the asteroids, 63%, fell into S/Q-type (S-type composition), 13% within X-type. Metallic asteroids (M-type) belong to X-typeclass. It can be concluded that distribution of various asteroid types within NEA population isfairly wide. Therefore, without enough data, it cannot be statistically predicted what kind ofasteroids in terms of compositional distribution are listed in Table 2.2 [44].
2.3 Asteroid 2014 UR
Potentially hazardous asteroids (PHAs) are asteroids with absolute magnitude (H) of 22 orless (around 150 meters in diameter), and minimum orbital intersection distance to Earth of0.05 AU [49]. In case of a close approach with Earth, PHAs are considered to be a potentialthreat. Moreover, in case of a collision event, asteroids bigger than 50 meters in diameterwould not disintegrate within the atmosphere, thus causing disastrous e�ects at the surface

2.3 Asteroid 2014 UR 11
[49]. Therefore, asteroid diameter limit of 50 meters is used to classify asteroids unsuitable forredirection (and thus, detumbling) mission to avoid any potential threats in case the missiondoes not go as planned.
Because rotation rate of the asteroid is one of the driving parameters for spacecraft designin this study, asteroids of interest are those which have rotational period observed (Table 2.2):2014 EK24, 2006 RH120, 2009 SH2, 2014 UR. The diameter of asteroid 2014 EK24 is esti-mated to be within 48.5 m and 96.9 m. In case the mission would not go as planned, the asteroidcould pose a threat of collision with Earth. Therefore, asteroid 2014 EK24 is not suitable forthis mission. Asteroid 2006 RH120 is small, therefore would require less propellant and timefor redirection. However, its rotation is much faster compared to 2009 SH2 and 2014 UR as-teroids. Fast rotation would significantly increase the complexity of the spacecraft, as well aslanding procedures, therefore this asteroid is also eliminated as a not suitable candidate. Aster-oid 2014 UR is rotating almost two times slower than the asteroid 2009 SH2. It is also expectedto be approximately two times smaller in diameter. Moreover, 2014 UR approaches the Earthclosely every year until 2025 (the last close approach with Earth is in February, 2025). Thenext close approach for asteroid 2009 SH2 is only in 2078 [15]. Therefore, asteroid 2014 URis the chosen candidate target for the spacecraft lander design.
As mentioned before, it has been impossible to do the full characterisation of the chosenasteroid due to the lack of data. The exact diameter, shape, spin rate, composition of the asteroidcan only be predicted within rough margins, which brings a lot of uncertainties into the landermechanism design.
2.3.1 Spectral Type of 2014 UR
The population distribution of spectral asteroid types is di�erent within main belt asteroids andNEAs. A study in 2016 by Carry et al., determined the taxonomy of 206 various sizes NEAsobserved by Sloan Digital Sky Survey (SDSS) [50]. 36.96% of observed asteroids belong toS-type, 23.48% to C-type, 14.35% to V-type, and 8.69% to Q-type. Surprisingly, the majorityof NEAs fall within S-type, while 75% of all known asteroids belong to C-type (as mentionedin the text before).
The study in 2018 by Perna et al., for the first time focused on classifying small NEAs withabsolute magnitude H � 20 [51]. The study was performed during the period of 30 nights.147 objects were observed and taxonomically classified. It has been shown that 39.73% ofobserved asteroids belong to S-type, 17.81% belong to X-type, 11.64% belong to Q-type, andonly 8.90% belong to C-type.
Both surveys by Carry et al. and Perna et al. found that the majority of asteroids belong toS-type. However, the result of distribution of other spectral types di�er noticeably. Within the

2.3 Asteroid 2014 UR 12
Table 2.3 Di�erent materials representation of S-type, V-type, Q-type, and C-type asteroids.
S-, V-, Q-type C-type
Compressive strength(MPa) 100 – 300 10 – 80
Representing materials BasaltPlaster,
limestone,kaolinite
population of small NEAs the second biggest type observed was X-type, while within NEAs ofall sizes the second biggest type is C-type. Therefore, it is di�cult to draw accurate conclusionsof what type of asteroid 2014 UR could be. The biggest likelihood is for it to be an S-type.The other types including M-type is less likely, since three di�erent types belong to X-type,and M-type is just one of them.
Since material properties are of high importance for design of anchoring mechanism, it isimportant to draw a conclusion of what kind of properties asteroid 2014 UR is expected tohave. Compressive strength is of particular importance, since it shows how hard it is to breakthe asteroid in order to anchor on it. Apart from S-type; V-type and Q-type asteroids are alsovery likely to be discovered within NEAs population. All three types have similar compressivestrength values. Another group of asteroids that is likely to be found within NEAs is C-type.
Table 2.3 shows what compressive strength each asteroid is expected to have, and what kindof materials here on Earth are good representatives for listed asteroid types. V-type, S-type, andQ-type asteroids have similar bulk density (and thus compressive strength) as basalt [52–54].C-type asteroids have similar density to plaster, limestone and kaolinite. Such information willbe useful in further chapters of this study, especially when analysing anchoring mechanism.
2.3.2 Surface Properties
Many asteroids are believed to be rubble piles. Rubble pile asteroid is formed from smallerpieces which are holding together due to self-gravitation forces. However, as can be seen inTable 2.2, all listed small asteroids are fast rotators. Being of low mass the asteroids havealmost negligible gravitational force, and quite often the same order or even higher centrifugalforce. The spinning rate of such asteroids is typically higher than their “rubble pile limit”,meaning that such objects are monolithic bodies [33, 55].
In order for the body to have a regolith layer, its gravity must be higher than its centrifugalacceleration. Therefore, it can be assumed that it is unlikely for the surface of asteroid 2014 URto contain a layer of regolith.

Chapter 3
Forces Acting on The Landed Spacecraft
In order to design a spacecraft for landing and despinning the asteroid, forces acting on thespacecraft must be taken into consideration. Not only they a�ect the spacecraft control, butalso the requirements for landing and anchoring systems. This chapter describes the mainforces that act on the spacecraft, their calculation procedure, and the magnitude range of thenet force that can be expected when landed on the asteroid.
3.1 Introduction
Since some of the characteristics and parameters of the asteroid and spacecraft are unknown orvague, it is desirable to estimate a range of the net force acting on the spacecraft, i.e. minimumand maximum possible forces. Natural forces acting on the lander include: gravitational force,centrifugal force, solar radiation pressure, and electrostatic force (Fig. 3.1) [56, 57]. Otherforces such as gas drag force, impact of dust particles and possible seismic motion are of verysmall magnitude or could even be non-existing for the chosen asteroid, thus assumed to benegligible. The main lander induced force is despinning force, i.e. force induced by thrustersduring the mission stage of asteroid despinning.
The equations and assumptions used for calculating the range of each force are describedin the sections below. For calculating the range of the forces the minimum and maximumpossible parameters and characteristics of the spacecraft and asteroid are given and explained.Parameters of the asteroid and spacecraft that are used extensively throughout this chapterare described in this section below. Individual parameters applicable only to calculation of aspecific force are provided in the relevant following sections.
Size of the spacecraft. It is not known yet what size the spacecraft will be, but it has beendecided that it has to be a CubeSat (refer to Section 1.2). As of 2011, the largest Cube-

3.1 Introduction 14
Figure 3.1 Schematic diagram showing the lander on the surface of asteroid with the mainnatural forces acting on it.
Sat that a standard dispenser can support is 27U, weighing 54 kg, and having dimensions of34 ⇥ 35 ⇥ 36 cm3 [38]. Maximum area that the spacecraft can land on is 0.126 m2.
The smallest possible lander is expected to be smaller than 27U CubeSat, but would not beexpected to be less than 3U. The limit of 3U is chosen, since 3U CubeSat INSPIRE (designedby NASA) is the smallest CubeSat designed for a deep space mission to date [58]. The weightof 3U is 4 kg, the spacecraft measures 10 ⇥ 10 ⇥ 30 cm3. The smallest area that the spacecraftcan land on is 0.01 m2.
Please note that spacecraft height above the surface is not taken into account when per-forming calculations.
Size of the asteroid. The density of the asteroid depends on its type. As mentioned in Chap-ter 2, the asteroid is most likely to be S- or C-type. C-type asteroids have density of 1.38 g/cm3
and S-type asteroids have density of 2.71 g/cm3 [59]. As noted in Table 2.2, the diameter ofthe asteroid can vary between 10.6 to 21.2 m. For simplicity, the asteroid is assumed to be asphere. Its mass then varies between roughly 860,600 kg and 13,520,000 kg.
Rotation of the asteroid. As mentioned before, it is not clear whether the asteroid is spinningor tumbling, since it was observed only for a short period of time. The observational periodof 2.37 h shows the change in brightness – it is a period over which the asteroid returns tothe same state. For instance, let us say the asteroid is actually tumbling, not spinning, and its

3.1 Introduction 15
observed period is 2 h. In case of a tumbling asteroid, it could be that its rotational periodabout one axis is 1 hour, and 2 hours around another axis. The lightcurve data would still showthat it returns to the same state after two hours. In this case, if the spinning assumption isused, then angular velocity is calculated assuming 2 h spinning period around one axis. Theangular momentum of an asteroid spinning around one axis would be much lower than angularmomentum of asteroid tumbling around two axes. This a�ects estimation for spacecraft fuelconsumption: less fuel is needed to despin the asteroid which spins about one axis, than theone which has angular velocity around two axes.
Asteroid 2014 UR has a rotation period of 2.37 h, and it is not clear whether the asteroidis spinning, or tumbling.
The kinetic energy equation for a rotating body is:
Ek =12
wwwT IIIwww, (3.1)
where w is angular velocity, I is inertia tensor. Angular velocity is expressed with respect toinertial reference frame which has its origin fixed to the mass centre of the body. Inertia tensorfor a sphere is:
III =25
mr2
2
641 0 00 1 00 0 1
3
75 , (3.2)
where m is mass of the body, and r is radius. It can be seen that the kinetic energy correlateswith the angular velocity, meaning the faster the body is spinning, the higher its kinetic energyis. Thus, in order to calculate for the worst case scenario using spherical body assumption, itshould be assumed that the asteroid has angular velocity around all three axes. It is typical forsuch small asteroids to have a tumbling period of just 10 minutes [33], thus it is decided to usethis value as rotation period around two axes. Spinning period about the third axis is 2.37 h.The angular velocity can then be expressed as: www = [0.01,0.01,0.00074]T rad/s. In the bestcase scenario the asteroid is spinning around one axis with 2.37 h period, giving the angularvelocity of: www = [0,0,0.00074]T rad/s.

3.2 Gravitational Force 16
3.2 Gravitational Force
According to the Newton’s second law, the force applied on the spacecraft due to gravity is
Fgrav = mscg =mscma
r2a
G, (3.3)
where G = 6.674⇥ 10�11 m3/kg s2 is gravitational constant, msc is mass of the spacecraft.The gravitational force is acting towards the centre of mass of the asteroid. Maximum andminimum possible values of the gravitational force then are 4.3⇥ 10�4 N and 8.2⇥ 10�6 Nrespectively.
3.3 Solar Radiation Pressure
Solar radiation pressure on Earth can be calculated by dividing the solar constant by the speedof light. Currently, the solar constant is known only at 1 AU. That value can be used forcalculating solar radiation pressure on the asteroid, since it has orbital parameters similar toEarth. The equation of solar radiation pressure on the asteroid thus is
prad =Wc, (3.4)
where W = 1362 W/m2 is solar constant at 1 AU, and c = 299,792,458 m/s is speed of light.Now, assuming the spacecraft lander surface is non-reflective, and the spacecraft is facing theSun at an angle of 0 degrees, the solar radiation force on the spacecraft can be expressed as
Frad =Wc
Asc, (3.5)
where Asc is the area of spacecraft surface facing the Sun. Thus, maximum and minimumpossible estimated values of the solar radiation pressure force on the spacecraft are 5.7⇥10�7 Nand 4.5⇥10�8 N respectively.
3.4 Electrostatic Force
The electrostatic force on the asteroid surface is generated by solar wind and solar radiation.Solar wind electrons are impacting the asteroid surface, while solar radiation stimulates elec-tron emission by photoelectric e�ect [60]. The currents generated by solar wind and solarradiation vary with surface location and time (due to asteroid rotation). Sunlit surfaces lose

3.5 Centrifugal Force 17
electrons and generate positive potentials, while shadowed surfaces gather electrons and gener-ate negative potentials. Generated electrostatic force can even be capable of levitating the duston the asteroid, but that of course depends on the size of the grains, as well as other asteroidphysical and orbital parameters.
The electrostatic repulsive force acting between the asteroid and the lander can be estimatedby knowing electrical potential on the asteroid surface and local electron density. To estimatethe force, the following equation is used [61]:
Fel = AscqneFa
2, (3.6)
where Fel is electrostatic force, q = 1.602⇥10�19 C is elementary charge, ne is local electrondensity, and Fa is electric potential on the asteroid surface. Photoelectrons density on theasteroid surface varies from 7⇥107 1/m3 to 2⇥108 1/m3, as taken from Nitter et al. (1998),Havnes et al. (1987), and Grard and Tunaley (1971) studies [62]. Electric potential on sunlitsurface reaches up to +5 V, and on a shadowed surface around �550 V to �2550 V [61].Maximum and minimum expected electrostatic force on the lander is 1.03⇥10�8 N and 6.17⇥10�11 N respectively.
3.5 Centrifugal Force
According to Newton’s second law, the centrifugal force in vector form can be expressed as
FFFcent = mscwww ⇥ (www ⇥ rrra). (3.7)
The centrifugal force is acting away from the centre of the asteroid.As mentioned in the introduction, the best case scenario is one-axis spinning case: the
asteroid is rotating only about one axis, and its angular velocity is www = [0,0,0.00074]T rad/s.In the worst case scenario – the asteroid is spinning about all three axis with angular velocityof www = [0.01,0.01,0.00074]T rad/s.
Best Case Scenario
The minimum possible centrifugal force is calculated assuming the smallest possible asteroidsize of 5.3 m in radius, and minimum spacecraft weight of 4 kg. If minimum possible angularvelocity of the asteroid is assumed to be around z-axis: www = [0,0,0.00074]T rad/s, then thelocation at which highest centrifugal force is acting must be on XY-plane, in this case chosento be rrra = [5.3,0,0]T m. The centrifugal force is estimated to be: FFFcent = 10�4[0.115,0,0]T N.

3.5 Centrifugal Force 18
Figure 3.2 Resultant centrifugal force distribution on asteroid 2014 UR for the worst case sce-nario.
Worst Case Scenario
Maximum possible centrifugal force is estimated assuming the largest possible asteroid size of10.6 m in radius, and maximum spacecraft weight of 54 kg. If maximum possible angular ve-locity is www = [0.01,0.01,0.00074]T rad/s, then the maximum resultant centrifugal force actingon the spacecraft is 0.126 N. The distribution of centrifugal forces around the asteroid surfaceis depicted in Fig. 3.2. From the distribution of the forces it can be seen that since the angularvelocities about both x- and y-axis are the same, the asteroid is rotating with the same velocityaround the resultant axis. The angular velocity around z-axis is much slower compared to x-and y-axis, therefore the centrifugal force due to rotation around this axis is much smaller.

3.6 Despinning Force 19
3.6 Despinning Force
Despinning force is the force required for despinning the asteroid so that its angular velocityaround all axes is zero. Such force can be found from the relation describing torque:
ttt = III ⇥aaa = rrra ⇥FFF , (3.8)
where t is torque, and F is force. Angular acceleration a essentially can be described as thechange of angular velocity over time:
aaa =dwwwdt
. (3.9)
Again, angular velocity for the best case scenario is: www = [0,0,0.00074]T rad/s. Angularvelocity for the worst case scenario is: www = [0.01,0.01,0.00074]T rad/s.
Best Case Scenario
For the most e�cient despinning of the asteroid, the spacecraft should land perpendicularlyto the axis of rotation. If not, during the despinning procedure, torque would be introducedaround the other axes. Using Equation (3.8), the force can be expressed as:
FFF? =rrra ⇥ ttt||rrra||2
. (3.10)
With angular velocity around z-axis of www = [0,0,0.00074]T rad/s, minimum moment of inertiaof I = 9.67⇥106 kg m2, and landing location at rrraaa = [5.3,0,0]T m, despinning force variationwith time is shown in Fig. 3.3.
Figure 3.3 Best case scenario force and time required for despinning the asteroid.

3.6 Despinning Force 20
Worst Case Scenario
In order to estimate the required force for despinning the asteroid in the worst case scenario,the landing location on the asteroid has to be determined.
In the worst case, as described in Section 3.5, the asteroid is spinning around resultant xy-axis at 0.01 rad/s. Angular motion around z-axis at 0.00074 rad/s is much smaller than motionaround xy-axis, which causes small precession. The most e�cient way to despin the asteroidis to land on a location at which rrr is perpendicular to the xy-axis (refer to Fig. 3.4). Asteroidcan then be despun around xy-axis by thrusting tangentially against the direction of angularvelocity vector (denoted as F1 in the figure). This would not induce extra torque around z-axis,since the despin force would be applied parallel to this axis, and precession motion assumed tobe negligible. After the asteroid is despun around xy-axis, it can then be despun around z-axis,by applying force against the direction of angular velocity vector about z-axis (denoted as F2
in the figure). Since the force is applied perpendicularly to the spinning axis, Equation (3.10)can be applied.
Figure 3.4 Landing location and direction of forces required for despinning the asteroid in theworst case scenario.

3.7 Net Force Acting on The Spacecraft 21
Figure 3.5 Worst case scenario force and time required for despinning the asteroid.
Figure 3.5 shows the force required to despin the asteroid within certain time frame. Asexpected, it can be seen that in order to despin the asteroid around xy-axis, the force required ismuch higher than despinning the asteroid around z-axis. For the worst case scenario, the totalforce for despinning the asteroid is the sum of exerted force within certain time frame aroundxy- and z- axis.
3.7 Net Force Acting on The Spacecraft
As mentioned at the beginning of this chapter, forces acting on the spacecraft will a�ect thechoice of its landing and anchoring systems, as well as other subsystems. All the forces calcu-lated in the sections above can be categorised into forces acting normally to the surface of theasteroid (all natural forces), and force acting tangentially to the surface of the asteroid (thrustforce exerted for despinning the asteroid).

3.7 Net Force Acting on The Spacecraft 22
Table 3.1 Net force and list of separate forces acting on the landed spacecraft in the normaldirection to the asteroid surface.
Fgrav (N) Frad (N) Fel (N) Fcent (N) Net Force (N)
min �8.2⇥10�6 �4.5⇥10�8 6.2⇥10�11 1.2⇥10�5 333...777666⇥⇥⇥111000���666
max �4.3⇥10�4 �5.7⇥10�7 1⇥10�8 0.126 000...111222666
The list of natural forces is provided in Table 3.1. It can be seen that the dominating forceacting on the spacecraft in normal direction is centrifugal force. Significant di�erence canbe noted between minimum and maximum centrifugal forces, which are mainly a�ected bythe angular velocity of the asteroid. Solar radiation pressure and electrostatic forces can beconsidered to be negligible because of their low magnitude. It can be concluded that the landedspacecraft must be capable of not drifting away from the asteroid when the maximum possiblenet force of 0.126 N is acting in the normal direction away from the asteroid surface.
It is however more di�cult to state what is the maximum possible force in tangential di-rection that the spacecraft should be able to withstand without drifting away. Considering thatthe timeframe of asteroid redirection mission is several years, even one month for despinningprocedure can be seen as a relatively short time period. Thus, the upper cap is placed by theCubeSat propulsion systems capabilities, which are discussed at the end of this study. How-ever, for now, in order to set a requirement for anchoring system, the limit is set to 50 N. In theworst case scenario, 50 N of force would despin the asteroid around xy-axis in less than 7 hand around z-axis in 0.5 h, which equals to just over 7 h of total despinning time.
Finally, the results also show the importance of knowing the parameters of the chosenasteroid as precisely as possible. Having more lightcurve data would help to better estimate theangular velocity of the asteroid, and know for certain whether it is spinning or tumbling. Thisuncertainty is the main reason why the di�erence is so great between minimum and maximumpossible natural forces acting on the spacecraft, as well as required force for despinning.

Chapter 4
Landing Systems Review and Choice
Successful landing on the surface of the asteroid is one of the key steps that have to be ac-complished before attempting to detumble the asteroid. Therefore, selecting a suitable landingmechanism is seen as a task of great importance in this study. In this chapter first the litera-ture review of existing landing concepts is provided, followed by a suitable landing techniquechoice for small asteroid detumbling mission.
4.1 Literature Review
For landing on the asteroid surface, either active or passive descent techniques can be em-ployed. Active descent means that the lander can control its descent trajectory after beingreleased from the mothership. Active descent option provides higher accuracy in landing andmobility, by typically involving propulsion and attitude control systems. Passive landing (alsocalled ballistic landing) means that the lander does not control its descent trajectory after therelease. Such lander designs result in low weight and volume requirements, and overall re-duced spacecraft complexity. However, uncertainty regarding landing accuracy and missionsuccess is increased.
The spacecraft’s capability to move across the surface of the asteroid is also worth consid-ering. Such possibility could improve the reliability of the mission in case the initial positionof the landed spacecraft is not satisfactory. Movement across the asteroid surface can be per-formed either by propulsion systems used for landing, or by simple mechanical mechanisms.
Existing concepts for active and passive descents are summarised below, by also describingwhat mechanisms are used for moving on the asteroid surface, if any. Some of the landingmechanisms are used for the missions described in the literature review in Section 1.1.

4.1 Literature Review 24
4.1.1 Active Descent
As mentioned above, the most common active decent option includes propulsion and attitudecontrol systems. One of such examples is the lander Bode designed for a multiple asteroidcharacterisation mission. Such mission concept has been suggested by Probst and Forstner [1].Bode is equipped with propulsion and attitude and orbit control (AOC) systems, which allowto perform controlled manoeuvring and landing. Landing in correct orientation is the mainrequirement, whereas the landing location on the asteroid for exploration purposes is not ofsuch great importance. Thus, the system does not employ any surface mobility mechanisms.For landing and departure manoeuvres the required change in velocity (DV ) is estimated to be100 m/s per asteroid. The disadvantage of such configuration is its high mass requirement. Theweight of required wet propulsion subsystem mass is 42.7 kg, and mass of AOCS is 51.1 kg.
Another active descent lander, however, not fully controlled, is being developed by Gedexand Space Flight Laboratory (SFL) [3], depicted in Figure 4.1. GRASP (GRavimetric Aster-oid Surface Probe) is a small scale satellite, weighing less than 20 kg, and fitting within a 12Uvolume CubeSat. GRASP is targeting to operate on small asteroids between 100 m and 1000 min diameter. The lander is released with spring ejection mechanism from the mothership. Ide-ally GRASP is expected to land on an asteroid in a hopping motion, but is still equipped withpropulsion system in case it bounces o� the asteroid (not further than 50 km). This can bedone by commands from the ground, since the system is not autonomous. The lander uses 6deployable legs. They are arranged in a way such that the lander can land in 8 stable landingconfigurations, each supported by 3 legs. The lander can hop across the asteroid’s surface us-
Figure 4.1 GRASP lander developed by SFL [3].

4.1 Literature Review 25
ing propulsion system. Also, whenever possible, reaction wheels will be employed to providetorque in order to initiate a hopping motion. It is estimated that the total DV needed is 170 m/s,which includes 100% margin (without including DV needed for recovery in case of a bounce-o�). Thrust magnitude needed is 100 mN, which is based on asteroid’s gravity and spacecraft’smass. Propulsion system’s wet mass is 2.8 kg.
A controlled landing concept which also increases landing stability is a spinning landersuggested by Southern California Selene Group (SCSG) [63, 64]. Using three sets of thrusters
(a) Spinning lander concept, where I denotes axial thrusters, J denotes radial thrusters, and K denotestangential thrusters [63].
(b) 3U spinning CubeSat manoeuvring with axial and radial thrusters [64].
Figure 4.2 Spinning lander concepts suggested by SCSG.

4.1 Literature Review 26
(axial, radial, and tangential), the lander’s velocity, spin rate and attitude can be controlled(Figure 4.2). For landing a 3U 5 kg spacecraft on the Moon, each of the thrusters can exert 22 Nof force, which is needed to counteract the gravity force. The lander concept is easily scalableand mass-e�cient. Most importantly, due to its gyroscopic sti�ness, such system cannot tipover during the landing, which ensures correct facing of the lander. The lander moves acrossthe surface of the body in a hopping motion, by employing the same thrusters which were usedfor landing.
4.1.2 Passive Descent
In 2017, Wang et al. from University of Southern California patented an “Instrument landerutilizing a CubeSat platform for in situ exploration of asteroids and comets” [4]. The proposedlander lands in uncontrolled descent, where trajectory is influenced by solar radiation pressureand asteroid’s gravitational force. The suggested lander is a 2U CubeSat structure (Fig. 4.3a).2U shape provides higher probability of landing on one of 4 rectangular faces in horizontalorientation, rather than one of two square faces in vertical orientation. A motor inside thespacecraft drives a flywheel (Fig. 4.3b). The torque generated provides mobility to turn thelander in one or both directions (for correct re-orientation purposes). However, if the space-craft lands vertically, a break can be used to provide additional torque for the lander to “hop”to another location in order to successfully settle on a preferred side of the spacecraft (Fig-ure 4.3a). When landed, either of two movements can be generated: (1) a hopping motion, and(2) a pivoting motion. Hopping motion can be achieved with the break, and pivoting motioncan be achieved with the flywheel.
(a) Mobility mechanism with a break (b) Flywheel mobility mechanism
Figure 4.3 Surface mobility mechanisms patented by University of California [4].

4.2 Landing Mechanism Selection 27
Figure 4.4 MASCOT mobility concept - eccentric arm concept [5].
The Hayabusa2 lander MASCOT is ejected by a spring mechanism at 100 m altitude abovethe asteroid surface, with a very small DV of 5 cm/s. MASCOT is not equipped with anyattitude or altitude control systems, thus lands by utilising the asteroid’s gravity field only. Thedescent takes approximately 20 to 30 minutes. MASCOT lands in a hopping motion until itcomes to rest in an a-priori unknown orientation [29]. To move on the surface, MASCOT usesan eccentric arm (Fig. 4.4) which can rotate up to few revolutions by activating a brushless DCmotor. It can either flip the spacecraft to di�erent orientation, or with more energy – hop fromthe surface.
Rosetta lander Philae was also released using spring ejection mechanism for landing on thecomet. The touchdown vertical kinetic energy was absorbed by the landing gear – during thetouchdown the lander head was pushed towards the tripod, this way transforming mechanicalenergy into electrical energy by the use of generator. Also, a cold gas thruster was mounted onthe lander, which could be fired at touch to reduce the bouncing, by pushing the lander towardsthe ground. Finally, lander also contained two harpoons with cords, which were supposed to beused for anchoring. However, during touchdown operation the thruster did not fire, thus firmfixation of the lander depended only on harpoons. But the harpoons did not fire either due tounknown reasons. Philae bounced across the comet’s surface for almost 2 h before coming torest. The weight of landing legs was 10 kg, weight of cold gas system was 4.1 kg [65]. Zhao, etal. in 2012 proposed an asteroid lander concept, inspired by comet lander Philae design [66].
4.2 Landing Mechanism Selection
Both active and passive descent options were described in the section above. It is clear thatpassive landing methods utilise the gravity of the body. The gravity of asteroid 2014 UR is

4.2 Landing Mechanism Selection 28
estimated in Chapter 3, and is shown to be of very small magnitude, meaning that it cannot beutilised for neither for landing procedure, nor for surface mobility. Thus, only active landingin this case is possible.
Regarding active descent options, two main methods were discussed: traditional controlleddescent and controlled spinning descent. Both options use propulsion and AOC systems. Themain di�erence between the two is that spinning descent achieves gyroscopic stability by axi-ally spinning the spacecraft until the touchdown. The advantage of the spinning control systemis that it occupies minimal volume (3U) and does not require much propellant. However, whenlanding on a spinning (or tumbling) asteroid, the spacecraft has to match the asteroid’s spinrate, so that the spacecraft constantly follows the same part of the asteroid before attemptingto land. A spinning lander is limited to motion along one axis. For instance, when landing onthe Moon, it would use its radial thrusters to create continuous up and down motion. In caseof a mission to a small spinning asteroid body, during the landing phase it would also need tobe thrusting along other axes in order to match asteroid’s spinning rate. This would result indestabilising spacecraft’s spinning motion.
Therefore, due to the reasons mentioned above, the chosen method for landing on a smallspinning asteroid surface is traditional controlled descent, which will employ propulsion andAOC subsystems.

Chapter 5
Anchoring Systems Review
The main purpose of the anchoring system is to ensure that the spacecraft remains on the surfacein the right orientation, by reacting to all forces or torques that might occur. When landing ona small asteroid with negligible gravity, during the impact with the surface, the spacecraft cangain energy from the asteroid rotation, which could cause the spacecraft to escape. Therefore,it is important to dissipate as much energy as possible during the impact, to ensure that theenergy gained from the asteroid rotation would be less than necessary to escape asteroid’ssurface [67]. Such energy can be dissipated by employing a suitable anchoring system. Sinceexact physical properties of asteroid 2014 UR are unknown prior to the mission, the anchoringsystem must be able to function within a range of di�erent possible asteroid parameters.
5.1 Literature Review
Anchoring methods can be divided into two categories: slow anchoring and high-speed an-choring. The main advantage of high-speed anchoring methods is little time required, whichmeans the spacecraft does not need to be held in place during the anchoring process for a longtime. However, some slow anchoring systems solve this problem by employing self-opposingmechanism. Also, slow anchoring systems typically o�er reusability, while most of the fastanchoring systems can only be used once. Slow anchoring methods include hammering, wet-ting fluid, melting strategies, drilling, and sawing. High-speed anchoring methods includemicrospine gripper, tethered spike, and telescoping spike strategies [6, 10]. Each method isdescribed below.
Some of the technologies described have technology readiness level (TRL) assigned tothem according to system developed by NASA. Please refer to Appendix A for a descriptionof each level.

5.1 Literature Review 30
5.1.1 Slow Anchoring Methods
Hammering. A suitable approach where fast penetration is not possible, is hammering theanchor in the surface [6]. The di�culty with this approach is that the nail must be perpendicularto the surface, otherwise the nail gets bent during the process. It is easier to penetrate intoplaster or limestone, however it is more di�cult with higher strength materials such as basalt.
Wetting fluid. Application of wetting fluid is another slow anchoring method. Fluid suchas cement, epoxy, foam, or similar, can be injected on the surface through some hollow tube,and this way anchor spacecraft to the surface. The advantage of this method is that during theprocess no reaction force is exerted on the spacecraft. Application of various wetting fluidsin space environment has already been demonstrated [6]. However this method has stabilityissues, since the spacecraft is required to stay still during the anchoring process.
Melting. A possible way to anchor to the asteroid is by melting a hole in it, and then placingan expansion device inside that hole [10]. For this technology to work, heated probe wouldbe needed for melting, which has significant power consumption requirements. Of course, thismethod would be highly dependent on the melting point of surface materials of the body, thusis mainly to be used on bodies rich in ice.
Drilling. One of the most commonly known slow anchoring techniques is drilling. However,long time and fairly high drill force required do not make this technique particularly attractive[10]. This method is feasible for penetrating low compressive strength materials such as plaster,limestone, but not that often employed for harder materials such as basalt [6, 68]. Drillingtechnology is also a popular choice as a sample collection tool for missions to comets or C-type asteroids.
Self-opposing drilling. Force applied towards the surface of the body for a long period oftime generates a reaction force on the spacecraft, therefore thrusters (or some other anchoringmechanisms) are required to hold the spacecraft in place. However, self-opposing anchoringsystems are being developed. Such systems apply opposing force to the reaction force, thusthere is no need to hold spacecraft in place by the use of thrusters. Cadtrak Engineering devel-oped a self-opposing drilling technique. Such technique decreases spacecraft preload require-ment (to oppose the reaction force), and thus minimises the propulsion system requirements.It works by using multiple drilling arms in a coordinated manner, as to keep the forces in equi-librium. Such sample drilling system is shown in Fig. 5.1a. The pull-out force of the system is200 N normal to the surface for basalt rock. To achieve such strength the drills penetrate into

5.1 Literature Review 31
(a) Cadtrak Engineering (b) Honeybee Robotics
Figure 5.1 Sample self-opposing drill systems [6]
a rock up to 3 mm depth in roughly 20 s. Required preload from a spacecraft is approximately10 N. Total power consumption is 10 W. The subsystem weighs 5 kg [69, 68, 6]. The systemhas also been tested on a lower strength material kaolinite. The pull-out strength was measuredto be 100 N normal to the surface, at 3 mm penetration depth. Power, preload and anchoringtime requirements for lower compressive strength bodies are expected to be smaller. The sys-tem is suitable for rocks, gravel and consolidated soil surfaces, and can penetrate at wide rangeof angles. The system suggested by Cadtrak uses 4 drills. The drills were tested in laboratoryenvironment, therefore, TRL is 4.
Similar approach is also suggested by Honeybee Robotics (Fig. 5.1b) [6]. Net force compo-nent is perpendicular to the surface, thus propulsion system of the spacecraft only has to exertforce in opposite direction. Specific power requirements or pull-out strength on di�erent rocksis not provided. However, if the same drill bit is used as for Cadtrak Engineering system, thevalues are expected to be similar. Important to note – because the mechanism of self-opposingsystem is designed di�erently, the preload force requirement during operation might be di�er-ent. Both Cadtrak Engineering and Honeybee Robotics systems are foldable and do not seemto occupy more than 1U of volume (as can be seen in the pictures). Drills are expected to bereusable until degraded.
Self-opposing sawing. A di�erent anchoring system for asteroid exploration is presentedby Zhang et al., which is based on sawing method (Fig. 5.2) [7]. Three robotic arms of thespacecraft are equipped with three sawing disks. The disks present with the possibility toanchor onto hard rock surfaces, such as plaster, marble, and granite. After disks penetrateinto the surface, the self-lock mechanism fixes the robotic arms on that surface. The systemprovides at least 157 N and 225 N force in tangential and normal directions respectively. It

5.1 Literature Review 32
Figure 5.2 Experimental setup of robotic arm presenting anchoring technology based on sawingmethod [7].
takes 1 minute to penetrate into plaster, and 3 minutes to penetrate into granite. The systemcan successfully operate at penetration angles of 45, 60, and 75 degrees. The preload requiredfor anchoring into plaster is only 0.5 N, and 8.6 N for penetrating into granite – which is lessthan drilling system requirements. The power requirement is 58.5 W and 11.2 W for graniteand plaster respectively. The robotic legs are foldable, and as it seems from the pictures, wouldnot take more than 1 U of volume. The weight of the system is 7.8 kg. It can also be re-usable, as long as sawing disks are not degraded. Sawing disks have been tested in laboratoryenvironment, therefore TRL is 4.
5.1.2 High-Speed Anchoring Methods
Microspine Gripper. A self-opposing high-speed anchoring system is being developed byParness et al., at NASA Jet Propulsion Laboratory [70]. Microspine gripper (Fig. 5.3), initiallydeveloped for rock climbing robots, can be used for grasping asteroid surface. Microspinegripper plants itself onto the surface by arraying many attachment points (toes of microspines)on the rock. Each microspine drags and stretches relative to the neighbouring microspines inorder to find suitable point on the surface to grip on. Thus, the lower surface roughness is,the harder it is for the microspines to grip on it – the strength of the device decreases. Poorestperformance of grippers was demonstrated on loose materials, such as bonded pumice, looselava rock, pea pebbles and sand [8]. The pull-out forces were only around 1 N. However,when tested on consolidated rocks, the gripper performed well by achieving more than 120 Nof pull out force in both tangential and normal directions. A single microspine gripper onlyweighs 1.05 kg, and takes less than 1U of space – as can be clearly seen from the pictures.

5.1 Literature Review 33
Figure 5.3 Left: NASA JPL microspine grippers being tested for anchoring strength at 45�.Right: CAD view of microspine gripper cross-section [8, 9].
The microspine gripper configuration consists of 16 carriages with 16 microspines in eachcarriage, and two actuators. The disengage actuator acts as a release mechanism by pullingthe carriages away from the rock surface. It is a 2 in (51 mm) custom designed linear actuator.The second, engage actuator, is responsible for securing the anchoring by applying tension toengagement cables, which connect to the carriages. The engage actuator is a 12 V DC brushedmotor provided by Maxon Motor USA. Such motors, as stated in Maxon Motor USA website,require 6 W (or less) of power. Since the power requirement of a linear actuator is not specified,by including factor of safety, it can be assumed that the system developed by JPL should notconsume more than 10 W of power in total during any stage of gripper activation. The normalposition of the gripper is locked, which means that once it holds onto the surface, no extrapower is needed for it to stay there. So far, microspine gripper system has been demonstratedin relevant environment, thus TRL is assumed to be 6.
The complete tool also includes anchoring drill and drive train, and could then be classifiedas a slow anchoring tool (due to time required for drilling). It was designed for the NASAARM mission. The complete tool is referred as a Microspine Tool. After the grippers have astable grasp with the surface, the anchoring drill is driven into the rock. During the drillingoperation, reaction forces and torques are redirected to the rock, thus no thrusting from thespacecraft to counteract the reaction forces is required. After the hole is drilled, a T-shapedanchor is deployed from the tip of the drill, cutting a T-shaped slot at the bottom of the borehole.The tool provides very high anchoring forces and also allows to collect the samples from thesurface [70, 8].

5.1 Literature Review 34
Figure 5.4 Telescoping spike anchoring system [10].
Telescoping spike. The telescoping spike (Fig. 5.4) penetrates the surface with spikes ofincreasing diameter towards the depth of the body. It was first developed by Stelzner andNasif [10] for ST4/Champollion mission. ST4/Champollion mission was supposed to be a jointNASA and CNES (the French Space Agency) mission to a comet. The mission was cancelledin 1999 due to budget constraints. The telescoping spike concept was chosen for anchoringto the surface of the comet. The spike is released explosively during the touchdown. A gasgenerator of the anchoring system is triggered by a laser altimeter, which senses the proximityof the surface. Gas generator accelerates telescoping spike which penetrates into the comet.
ST4/Champollion anchor is designed to provide at least 450 N pull-out strength in any di-rection. Because of the uncertainties in comet properties, the anchor is designed to penetrateup to 3 m of comet surface depth. The dissipation of energy during penetration is achieved viaplastic deformation of anchoring parts. The telescoping spike system consists of three mainparts: spike, tube 1, and tube 2 (Fig. 5.5). During anchoring, a certain length of the spikesection is plastically deformed to the tube 1 (which has larger diameter) during coupling. Eventhough the anchoring process is robust and fast, the main disadvantage is the large lateral loadsimparted on spacecraft during the process. For ST4/Champollion mission 100 kg spacecraftthe anchor to the surface of the comet, the anchor must be released at 120 m/s velocity. Thepenetrating spike weighs 2.3 kg. The system has been tested on homogeneous and heteroge-neous surfaces. 450 N anchoring strength in any direction has been achieved when penetratingat impact angles of up to 45� into materials of up to 10 MPa of compressive strength.
Inspired by ST4/Champollion mission to the comet, Liu et al. in 2013 suggested using tele-scoping spike concept for anchoring to the asteroid [71]. The tests of their proposed anchoringsystem were successfully performed on sand and soil, which have densities of 1.71 g/cm3 and1.89 g/cm3 respectively. The anchoring force for sand and consolidated soil substances is 18 Nand 10 N, where initial penetration velocity is 10.2 m/s and 22.6 m/s respectively. The subsys-

5.1 Literature Review 35
Figure 5.5 Telescoping spike system for ST4/Champollion mission [10].
tem weighs around 1 kg, and occupies less than 1 U of CubeSat volume [11, 71]. The telescop-ing spike system does not provide re-anchoring possibility. Since the telescoping componentshave been tested in laboratory and relevant environment, TRL is assumed to be 4.
Tethered Spike. Tethered spike and multi-legged tethered spike concepts are depicted inFig. 5.6a and Fig. 5.6b respectively. The spike is explosively released from the spacecraft andpenetrates the surface of the body. The tether is then being pulled until the required tension isreached. However, if the body is rocky and has heterogeneous surface, the spike can deflectfrom its intended path. Therefore, the tethered spike is more suitable for gravel and consol-idated soil surfaces [6]. Multi-legged tether spike system works in the same manner, exceptit uses multiple spikes for penetration. It provides tighter anchoring, but since the interactionwith the surface is increased, it poses more risks. Quadrelli et al. demonstrated that a singletether provides more than 450 N of anchoring strength in any direction when anchoring to lowcompressive strength materials (representing C-type asteroids). System applicability to widerange of angles was also demonstrated.
Tethered anchoring system was installed into the Rosetta lander Philae (Fig. 5.7) [11]. Twoharpoons were mounted in the landing gear. One of them was supposed to be fired automati-

5.1 Literature Review 36
(a) Tether spike (b) Multi-legged tether spike
Figure 5.6 Tethered spike anchoring system [10].
cally. The firing mechanism would have been activated by firing the projectile, after sending atouchdown signal from the landing gear. Rewind system would have then spooled up the an-chor cable until the required tension was reached. However, the signal was not sent, thereforethe system failed to fire. Since the system was not demonstrated in the relevant space environ-ment, its TRL is assumed to be 6. The weight of a single harpoon subsystem is 0.9 kg, and itoccupies roughly 0.5U of CubeSat volume.
Magnetic Anchoring. For metal-rich, magnetised asteroids, magnetic anchoring is possible.One of the concepts is envelopment – it uses cables to grab the asteroid as shown in Fig. 5.8.
(a) Philae landing gear (b) Anchoring harpoon projectile
Figure 5.7 Philae harpoon anchoring system mounted in the landing gear [11].

5.2 Criteria for Successful Anchoring 37
Figure 5.8 Magnetic anchoring concept “Harvestor” by Deep Space Industries [6].
5.2 Criteria for Successful Anchoring
Due to the uncertainties with the physical parameters of asteroid 2014 UR (refer to Chapter 2),multiple selection criteria for choosing the most suitable anchoring methods have to be es-tablished. Criteria listed in Table 5.1 are used for the selection of the ideal anchoring systemcandidate. Each criterion is provided with an explanation of why it is important.
5.3 Discussion of Suitable Anchoring Systems
In the literature review above two types of drilling systems were considered: the ones requiringvery high preload, and the ones which are self-opposing, thus having less preload requirements.In case of former, the preload force sometimes must be applied for fairly long periods of time,which results in high propellant requirements, and increased mission complexity. Thereforeonly self-opposed drilling systems will be considered as a potential candidate for asteroid de-tumbling mission.
Another slow anchoring method, hammering, requires very powerful nail-gun to be ableto penetrate into harder composition surfaces. Significant preload of about 10 Ns is required.To rebound such energy the spacecraft would need to produce a reaction force, by, for in-stance, firing thrusters in the opposite direction. Moreover, this method requires the nail to beperpendicular to the surface. Such requirement significantly increases the complexity of thespacecraft, to be able to autonomously correctly position the nail. Therefore, the discussedhammering method is ruled out as unsuitable for such small asteroid mission, where one of thecriteria is applicability to wide range of angles.

5.3 Discussion of Suitable Anchoring Systems 38
The method of wetting fluid is also considered as not viable. Such method would be moresuitable for large bodies (so that gravity can be utilized), since near-perfect stability during theanchoring process is required. However, in case of small tumbling asteroids of negligible grav-itational force, very high requirements on propulsion and control systems would be imposedfor longer times. As such, design of the spacecraft would be too complex.
The melting method is not viable for S-type asteroids (which are expected to be the ma-jority). Such method could be successfully utilized on asteroids rich in ice, however meltingother types of asteroids would impose high power requirements on the spacecraft. Moreover,it would also be a very slow anchoring process.
The microspine tool consisting of microspine gripper, drilling mechanism and drivetrainprovides pull-out strength of 280 N and 190 N in tangential and normal directions respectively.Such anchoring strength is much greater than needed, therefore it was decided to consideronly the microspine gripper system. It is much lighter and takes less space, and also the powerrequirement is lower since no drilling is required. It satisfies the criteria presented for anchoringsystems, therefore the microspine gripper, as a fast anchoring method, will be considered next.
Multi-tethered spike anchoring system would be unnecessarily complex for a detumblingmission on small asteroid body. The benefit of higher strength from multiple anchors is not con-sidered to be significant, since anchoring strength provided by one anchor is already enough.Multiple anchors would also significantly increase system complexity. Moreover, the smallasteroid diameter would impose limits on tether length. Therefore, a system with one tetheredspike is considered as potential candidate, assuming it would be fired when the spacecraft ishovering close to asteroid surface.
Finally, the magnetic anchoring method is only suitable for ferromagnetic bodies. There-fore, since composition of the chosen asteroid 2014 UR is unlikely to be M-type, this anchoringtechnique cannot be selected.
After initial overview of anchoring concepts, the remaining methods to select from areself-opposing drilling, sawing, microspine gripper, tethered spike, and telescoping spike.
5.3.1 Summary of Anchoring Systems Candidates
Selected anchoring systems will be compared in the next chapter according to the criteria pre-sented in Section 5.2. Summary of parameters of each candidate is presented in Table 5.2.

5.3 Discussion of Suitable Anchoring Systems 39
Table 5.1 Criteria for selecting suitable anchoring system.
Criteria Explanation Unit
1 Small mass In order to minimise the mass of the spacecraft it ispreferable for each sub-system to have as minimalmass as possible.
Kilograms
2 Small volume In order to minimise the volume of the spacecraft itis preferable for each sub-system to occupy as littlespace as possible.
CubeSatunits
3 Low powerrequirement
High power requirements result in heavy batteries oc-cupying large volume of the spacecraft. Moreover,high power requirement on one subsystem would re-sult in compromising the operation of other subsys-tems. Therefore, subsystems with low power require-ments are preferred.
Watts
4 Low preloadrequirement
Some anchoring systems might need additionalthrusting during the anchoring process. This compli-cates spacecraft design. Therefore, subsystems withno preload or low preload requirements are preferred.
Newtons
5 High TRL More developed and tested technologies are pre-ferred over less advanced ones.
TRL level(1 – 9)
6 Re-anchoringpossibility
In case anchoring process is not successful during thefirst attempt, re-anchoring capability is highly pre-ferred, which significantly increases the robustnessof the mission.
Qualitative(no, partial,yes)
7 Anchoring abilityover wide rangeof angles
In case the landing location is on a steep rock, anchor-ing at an angle might be needed. Therefore, systemsable to anchor on wide range of angles are preferred.
Qualitative(none,narrow,moderate,wide)
8 Suitability forwide range ofasteroid surfaces
Due to possibility of asteroid having C-type or S-typecomposition, anchoring should be possible on bothtypes of asteroids.
Qualitative(gravel,soil, rocks)
9 Short anchoringtime
Shorter anchoring times save fuel needed for hover-ing near the asteroid, or holding onto its surface. Italso reduces complexity of the mission.
Minutes,seconds
10 High pull-outstrength
Su�cient anchoring strength (at least 50 N and0.126 N in tangential and normal directions respec-tively) is needed to ensure that the spacecraft will notdrift away.
Newtons

5.3 Discussion of Suitable Anchoring Systems 40Ta
ble
5.2
Para
met
erso
fanc
horin
gsu
b-sy
stem
s.
Crite
ria
Slow
Anc
horin
gM
etho
dsFa
stA
ncho
ring
Met
hods
Self-
Opp
osin
gD
rillin
gSa
win
gM
icro
spin
eG
rippe
rTe
ther
edSp
ike
Tele
scop
ing
Subs
yste
mM
ass(
kg)
57.
81.
050.
91
Subs
yste
mVo
lum
e(U
)<
1<
1<
11.
5<
1
Pow
er(W
)C-
type
NF
11.2
2<
10N
eglig
ible
Neg
ligib
leS-
type
4058
.41
Prel
oad
requ
ired
(N)
C-ty
peN
F0.
459
NA
NA
NA
S-ty
pe10
8.63
7
TRL
44
66
4
Re-a
ncho
ring
capa
bilit
yPa
rtial
Parti
alYe
sN
oN
o
Rang
eof
angl
esfo
ran
chor
ing
Wid
eM
oder
ate
Wid
eW
ide
Wid
e
App
licab
lesu
rface
sRo
cks,
grav
el/so
ilcRo
cks
Rock
sG
rave
l/soi
lG
rave
l/soi
lc
Anc
horin
gtim
e(m
m:ss
)C-
type
NF
01:0
0N
AN
AN
AS-
type
00:2
003
:00
Pull-
outs
treng
th(ta
ngen
t,no
rmal
)(N
)C-
type
NF,
100
157,
225
>14
0,>
130
>45
0,>
450
>45
0,>
450
S-ty
peN
F,20
0N
F,N
FN
F,N
Fc
–co
nsol
idat
ed.
NA
–no
tapp
licab
le.
NF
–no
tfou
nd.

Chapter 6
Anchoring System Choice Using MCDM
As presented in Section 5.2, there are multiple criteria according to which the best anchoringsystem is chosen. From Table 5.2 it can be seen that all of the listed anchoring technologieshave advantages and disadvantages. All of them show great performance in one set of crite-ria while significantly underperform in another set of criteria. Therefore, decision making forwhich anchoring system to choose is not straight forward. In order to choose the most suit-able system, multi-criteria decision making (MCDM, sometimes abbreviated as multi-criteriadecision analysis – MCDA) technique is used.
6.1 Introduction
The purpose of MCDM is to employ decision maker’s preference when finding a unique op-timal solution for problems involving multiple criteria. In any decision making methodologythe following steps are involved (as defined by Majumder and Mrinmoy) [72]:
1. Identification of the objective/goal of the decision making process.
2. Selection of criteria, parameters, factors and decider.
3. Selection of the alternatives.
4. Selection of the weighing methods to represent importance.
5. Method of aggregation.
6. Decision making based on the aggregation results.
For this study the goal of the multi-criteria decision making process is to choose the mostsuitable anchoring system for a small asteroid detumbling mission. The flowchart of the process

6.1 Introduction 42
is provided below in Fig. 6.1. The steps of selecting criteria and alternatives (i.e. anchoringsystems) were already described in Chapter 5, with criteria provided in Table 5.1, and alterna-tives with their parameters listed in Table 5.2. Since all criteria are not of equal importance, amethod for assigning weights to each criterion has to be selected. After the weights are calcu-lated, method of aggregation for the alternatives is chosen. Finally, the most suitable systemcan be selected.
Exact numerical descriptions of each criteria, procedure of assigning weights, and choiceof suitable aggregation method are described in the sections below. The reader is suggested torefer to the flowchart diagram throughout all sections of this chapter for a better understandingof the MCDM process.
Figure 6.1 Flowchart for the MCDM methodology.

6.2 Criteria Description 43
6.2 Criteria Description
In order to have a decision making process as accurate as possible, it is important to ensure thatthe criteria are not overlapping and also to convert qualitative values into quantitative ones. Inthis section, the overlapping criteria will be put under one criterion, and qualitative criteria willbe given suitable quantitative descriptions. The final table of all criteria used for the MCDMprocess will then be presented.
For the interest of the reader, it might be important to note that at this point some of thecriteria will have di�erent units. The units will however be normalised later from 0 to 1 whenaggregation method (PROMETHEE in the flow chart) is assigned, and preference functionsselected. This will be explained in Section 6.4.
Finally, in the criteria parameters table (Table 5.2), it can be seen that the parameters ofsome of the alternatives are unknown for both S-type and C-type asteroids. For evaluationpurposes, power, preload required, and anchoring time values will be taken for anchoring to S-type asteroid. It is a reasonable choice, not only because all values are known for this asteroidtype but also because as described in Section 2.3.1, majority of small NEAs are expected to beS-type.
Mass, Volume and Power (MVP)
Mass, volume and power (MVP) are interdependent parameters of similar importance. Forinstance, higher power requirements result in larger batteries, which hence add more weightand volume. Therefore, it is decided to put all three parameters under a single criterion, byusing points system, as explained below.
1U CubeSat must weigh not more than 1.33 kg, according to the standard CubeSat launchdispenser [73]. Thus, if a system occupies 1U of volume, it is assumed to be of roughly thesame importance as if the system weighs 1.33 kg. Comparison of mass and volume with poweris not that simple. Knowing that the e�ective area of body-mounted solar cells, is related to thearea of the sides of satellite, it can be said that the maximum power available for the satellite
Table 6.1 Maximum power available for di�erent CubeSat platforms.
Volume (U) Surface area (cm2) Power available (W)
1 600 302 800 403 1400 704 1600 806 2200 110

6.2 Criteria Description 44
Table 6.2 Points corresponding to volume, mass and power that anchoring system requires.
Volume (U) Points Mass (kg) Points Power (W) Points
0 <V 1 1 0 < m 1.33 1 5 < P 15 11 <V 2 2 1.33 < m 2.66 2 15 < P 25 22 <V 3 3 2.66 < m 3.99 3 25 < P 55 33 <V 4 4 3.99 < m 5.32 4 55 < P 65 44 <V 5 5 5.32 < m 6.65 5 65 < P 80 55 <V 6 6 6.65 < m 7.98 6 80 < P 95 6
is related to its surface area. For instance, the GomSpace power system for 1U CubeSat canprovide 30 W of power (total of 600 cm2 of surface area), and power system for 3U CubeSatcan provide 60 W of power (1200 cm2 of surface area if panels are mounted on the sides of thespacecraft, excluding top and bottom). Thus, an assumption is made that 200 cm2 of availablespacecraft surface area can provide 10 W of power. Table 6.1 provides estimates of availablepower for up to 6U CubeSat platforms. Since 5U platforms as such do not exist, it could beassumed that 5U would provide maximum of 95 W of power.
During the anchoring, the power has to be provided not only to the anchoring system, butalso distributed to propulsion system (if anchoring requires preload), on-board computer forcalculations and sending instructions for anchoring, and maybe for communications with moth-ership if needed. 15 W of power is decided to be left for such operations, meaning that the an-choring mechanism can consume maximum available power minus the margin of 15 W. If lessthan 5 W of power is required, then it can be assumed that power consumption is negligible.The following point system as presented in Table 6.2 is thus used.
For instance, a self-opposing drilling system scores 8 points for MVP criterion: 4 points forthe weight (5 kg), 1 point for the volume (< 1U), and 3 points for power consumption (40 W);which in total is 8 points. Using the same principle, sawing, microspine gripper, tethered spike,and telescoping systems score 11, 3, 3, and 2 points respectively.
Re-anchoring
Re-anchoring capability can be described as “none”, “partial”, or “capable”. “None” meansthat re-anchoring is impossible after failed anchoring attempt. This applies to tethered spikeand telescoping systems. “Partial” means that the system is capable to re-anchor for a lim-ited number of times. For instance, drill bits or sawing tool parts are worn out fairly quickly,especially after anchoring to hard rocks such as basalt. Finally, “capable” means a successfulre-anchoring many times. This applies to microspine gripper, since it can re-anchor many timesbefore being worn out [8]. The score for each alternative is assigned as follows: 0 points for

6.2 Criteria Description 45
no re-anchoring capability, 0.5 points for partial re-anchoring, and 1 point for a system whichis capable to re-anchor.
Anchoring at Wide Range of Angles
Ability of the mechanism to anchor to rocks at wide range of angles is described as “none”,“narrow”, “moderate”, and “wide”. “None” means that the system is capable to anchor only ata certain angle. For instance, a hammering tool described in the anchoring systems literaturereview is able to anchor only when placed at 90� angle to the rock. “Narrow” means, that systemcan anchor at a range of ±10� angle to the rock. “Moderate” provides range of anchoring at±30� to the rock. And finally, “wide” means that the system is capable of anchoring at ±45�
to the rock. The score is distributed as follows: if the system is not capable to anchor at anyrange of angles, it gets 0 points, if it is capable to anchor at narrow range of angles it gets 1point, if the range is moderate, the system gets 2 points, and if the range is wide, the systemgets 3 points.
Applicability to Di�erent Surfaces
The systems selected are applicable to anchor to rock, gravel or consolidated soil surfaces (or acombination of few). As mentioned in Section 2.3.2, the surface of the asteroid most likely willbe rocky. Therefore, ability to anchor to a rocky surface is greatly preferred. Thus, the pointsfor di�erent surface applicability are distributed as follows: 0 for gravel, soil, or combinationof both; 0.9 for rock; 1 for combination of gravel, soil, and rock, or soil and rock.
Su�cient Anchoring Strength
As shown in Chapter 3, no more than 0.125 N of anchoring strength in normal direction is re-quired, and no more than 50 N of anchoring strength in tangential direction is required. There-fore, it is decided to assign 0 if su�cient anchoring strength of 0.125 N and 50 N in normaland tangential directions respectively is not reached, and 1 if su�cient anchoring strength isreached. It is not very important whether the system can achieve 100 N or 200 N, since bothof these anchoring strengths would lead to the same asteroid detumbling performance.
It can be seen from the criteria table that the tangential anchoring strength value for adrilling system is not provided. However, assuming the drill bit would not break when 50 Nforce is applied in tangential direction, the drilling system pull-out strength can be consideredas su�cient. If the self-opposing drilling system gets selected, the required material for adrill bit to withstand such strength, will be looked at. It can also be seen that tethered spike and

6.3 Criteria Weights 46
Table 6.3 Numerical criteria for each alternative.
CriteriaSelf-
OpposingDrilling
Sawing MicrospineGripper
TetheredSpike Telescoping
g1 MVP (score) 8 11 3 3 2
g2PreloadRequired (N) 10 8.637 0 0 0
g3 TRL (level) 4 4 6 6 4
g4Re-anchoring(score) 0.5 0.5 1 0 0
g5
Anchoring atWide Range ofAngles (score)
3 2 3 3 3
g6
Applicability toDi�erentSurfaces (score)
1 0.9 0.9 0 0
g7Anchoring Time(minutes) 0.33(3) 3 0 0 0
g8
Su�cientAnchoringStrength (1 or 0)
1 1 1 unknown unknown
telescoping systems strength values for anchoring on S-type asteroid are not provided, thereforethe anchoring strength will be left as unknown for these two alternatives.
6.3 Criteria Weights
Not all criteria are of equal importance. Therefore a system of showing how each criteriondi�ers from one another is needed. The importance of criterion can be shown by assigningweight, such that:
k
Âj=1
Wj = 1, (6.1)
where W is weight, subscript j denotes each criteria, and k is number of alternatives.The weights can be found from pairwise comparisons of each two criteria. Triantaphyllou
provides a method of deriving relative criteria weights from di�erence comparisons [74], by

6.3 Criteria Weights 47
asking a question “How much is criterion 1 more important than criterion 2?”. The proposedsimilarity scale used to compare two criteria is presented in Table 6.4.
For instance, a pairwise comparison of criteria g1 and g2 is w12 = |W1 �W2|, where gdenotes criteria. It can be seen that pairwise comparison does not show which criteria is moreimportant – only how similar the two are. For instance, using similarity scale, value of w12
(di�erence of importance between having small MVP and having low preload requirement) is0.1, because both criteria are seen to be of almost identical importance. In the same way, therest of the comparisons are made, and are presented in matrix form in Table 6.5. More detailedreasoning behind each pairwise criteria comparison is provided in Appendix B.1.
The values of di�erence between criteria in Table 6.5 are re-arranged in Table 6.6. Theincreasing di�erence in similarity of each criteria pair shows the order of criteria importance.As can be seen in the table, the order of criteria from least important to most important is: g3,g7, g2, g1, g4, g5, g6, g8.
6.3.1 Optimal Pairwise Comparison
It is important to note, that according to the Human Rationality assumption [74], a decisionmaker is considered to be a rational person. This means, that decision maker is trying tominimise their regret and maximise the profit by putting e�ort in trying to minimise the errorsinvolved in pairwise comparisons. However, it can be seen that the values in Table 6.6 are notperfectly consistent, which is due to human error. For instance, criterion g6 is more importantthan criterion g7, and the di�erence between the two is 0.8. Criterion g6 is also more importantthan criterion g3, and the di�erence between the two is 0.7. This should mean that criterion
Table 6.4 Similarity Scale proposed by Triantaphyllou.
Intensity of Similarity Definition
0 The two entities are identical.0.10 Almost identical.0.20 Very similar.0.30 Almost very similar.0.40 Almost similar.0.50 Similar.0.60 Almost dissimilar.0.70 Almost very dissimilar.0.80 Very dissimilar.0.90 Almost completely dissimilar.
1 Completely dissimilar.

6.3 Criteria Weights 48
Table 6.5 Matrix of pairwise di�erence comparisons of criteria.
W1 W2 W3 W4 W5 W6 W7 W8
W1 0 0.1 0.3 0.3 0.5 0.6 0.3 0.6W2 0.1 0 0.2 0.3 0.5 0.7 0.2 0.7W3 0.3 0.2 0 0.4 0.6 0.7 0.1 0.8W4 0.3 0.3 0.4 0 0.2 0.4 0.4 0.5W5 0.5 0.5 0.6 0.2 0 0.2 0.5 0.4W6 0.6 0.7 0.7 0.4 0.2 0 0.8 0.2W7 0.3 0.2 0.1 0.4 0.5 0.8 0 0.8W8 0.6 0.7 0.8 0.5 0.4 0.2 0.8 0
Table 6.6 Closest Discrete Pairwise (CDP) matrix (after re-arrangement).
W3 W7 W2 W1 W4 W5 W6 W8
W3 0 0.1 0.2 0.3 0.4 0.6 0.7 0.8W7 0.1 0 0.2 0.3 0.4 0.5 0.8 0.8W2 0.2 0.2 0 0.1 0.3 0.5 0.7 0.7W1 0.3 0.3 0.1 0 0.3 0.5 0.6 0.6W4 0.4 0.4 0.3 0.3 0 0.2 0.4 0.5W5 0.6 0.5 0.5 0.5 0.2 0 0.2 0.4W6 0.7 0.8 0.7 0.6 0.4 0.2 0 0.2W8 0.8 0.8 0.7 0.6 0.5 0.4 0.2 0
g3 should be more important than criterion g7 by 0.1 di�erence. However, it is the other-wayround. Such inconsistencies could be fixed by changing each value until the matrix is perfectlyconsistent. However, although done quite often, this is a long process of trial-and-error, afterwhich it is still nearly impossible to reach complete consistency.
Triantaphyllou [74] suggested a process for achieving perfectly consistent pairwise criteriacomparison matrix by solving a linear least squares problem: the error minimisation is inter-preted as minimisation of the sum of squares of the residual vector, which is expressed as atypical linear least squares problem. Therefore, an error factor Xi j (due to human error) isintroduced with each comparison:
Xi jwi j = Xjiw ji = ai j = a ji = |Wi �Wj|, (6.2)
where a is the actual value of pairwise comparison. Optimal pairwise comparison matrix (RealDiscrete Pairwise (RDP) matrix) can be found, when all Xi j variables are equal to 1. Thus thegoal is to find Xi j values which minimize the sum of squares function, subject to constraints.

6.3 Criteria Weights 49
The objective function of quadratic programming problem with linear constraints, as derivedby Triantaphyllou [74], is the following:
minimize f =n�1
Âi=1
n
Âj=i+1
X2i j �2⇥
n�1
Âi=1
n
Âj=i+1
Xi j,
subject to Xk jwk j +Xjiw ji �Xikwik = 0
(6.3)
for any n � i > j > k � 1 and all Xi j � 0, where n is number of constraints. The number ofconstraints is equal to the number of criteria. This quadratic problem can be transformed intoequivalent system of linear equations (general form):
"IIIm �AAAT
AAA OOON
#⇥"
XXXlll
#=
"111000
#, (6.4)
where IIIm is identity matrix of order m (m = n(n�1)/2), AAA is N ⇥m matrix with coe�cientsof CDP matrix in Table 6.6 (where N = n(n�1)(n�2)/6), AAAT is transpose of AAA, OOON is squarematrix of order N (all entries are zeros), XXX is a vector of size m with Xi j variables, lll is a vectorof size N with Lagrangian coe�cients li, 111 is a vector of size m (all entries are ones), 000 is avector of size N (all entries are zeros).
Any column (or row) of matrix �AAAAAAT is linearly dependent on the remaining columns(or rows), and the remaining columns (or rows) are linearly interdependent. Therefore, one ofany li values can be set to any arbitrary value, in order to solve the system of linear equations(Equation 6.4) for determining error factors [74].
The RDP matrix can then be found by multiplying error factors by actual values (Xi jwi j),and is presented in Table 6.7.
Table 6.7 Real Discrete Pairwise (RDP) matrix.
W3 W7 W2 W1 W4 W5 W6 W8
W3 0 0.0812 0.2155 0.3065 0.4940 0.6688 0.8490 1.0162W7 0.0812 0 0.1343 0.2253 0.4128 0.5876 0.7678 0.9350W2 0.2155 0.1343 0 0.0910 0.2785 0.4533 0.6335 0.8007W1 0.3065 0.2253 0.0910 0 0.1875 0.3623 0.5425 0.7097W4 0.4940 0.4128 0.2785 0.1875 0 0.1748 0.3550 0.5222W5 0.6688 0.5876 0.4533 0.3623 0.1748 0 0.1802 0.3474W6 0.8490 0.7678 0.6335 0.5425 0.3550 0.1802 0 0.1672W8 1.0162 0.9350 0.8007 0.7097 0.5222 0.3474 0.1672 0

6.3 Criteria Weights 50
Table 6.8 Weights of each criterion.
Criterion g3 g7 g2 g1 g4 g5 g6 g8
Weight 0.0904 0.0991 0.1093 0.1202 0.1332 0.1399 0.1506 0.1574
Some initially estimated CDP values showed inconsistency of more than 25%. Largesterrors were found for the following entries w38 (X38 = 1.27), w72 (X72 = 0.67), w14 (X14 = 0.62)and w15 (X15 = 0.72).
It is nearly impossible for humans to be perfectly consistent, especially when it involveslarger number of criteria. Therefore, it is important to check the consistency and introduceerror factor in order to obtain the matrix of optimal pairwise comparison, as presented in Ta-ble 6.7. After error correction, RDP matrix shows pairwise criteria comparisons with perfectconsistency.
The MATLAB code for calculating error values and RDP matrix is provided in Appendix B.2.
6.3.2 Weights of Criteria
Finally, since pairwise weight distribution is known, weights of importance of each criterioncan be found from Equation 6.2. Again, the order of significance of criteria is known to beincreasing (from least important to most important) as follows: g3, g7, g2, g1, g4, g5, g6, g8.
MATLAB’s non-linear solver fsolve is used for solving the system of equations. The arbi-trary initial input for the solver is given in increasing order for each criteria weight: [W3 W7 W2
W1 W4 W5 W6 W8]. The system of equations is then solved until the solution converges.Each weight is then normalised so that the sum of all weights is equal to one. Since all
weights have to be normalised to positive values only, the following equation is used:
Wi =exp(Wi)
Âj
exp(Wj). (6.5)
Final weights of each criterion are presented in the Table 6.8. It can be seen that the twomost critical criteria of anchoring system are ability to provide su�cient anchoring strength(g8), and ability to anchor to di�erent surfaces (g6). The second group of the two most im-portant criteria are ability to anchor at wide range of angles (g5), and ability to re-anchor (g4),which is then followed by low mass, volume and power budgets criterion (g1). The last groupof lowest importance criteria is low preload requirement (g2), short anchoring time (g7), andhigh TRL (g3).

6.4 Method of Aggregation 51
It can be seen that the criteria that are the most critical for the success of the mission have thehighest weights of importance. Without su�cient anchoring strength the mission is impossible.Without ability to anchor to di�erent possible surfaces, and wide range of angles, the missionsuccess is not likely. Without ability to re-anchor the mission is fairly risky. If mass, powerand volume of the spacecraft are high, the mission complexity and costs increase significantly.Finally, high preload requirement, long anchoring time and low TRL would make the spacecraftmuch more complex, and mission less feasible.
It is important to note, however, that some of the criteria are a�ecting one another. Forinstance high preload would a�ect mass and volume, since more fuel would be required. Thesame applies for anchoring time. Of course, the study would be even more accurate if none ofthe criteria were overlapping. However, it can be concluded that the weights derived are rea-sonable, since the most important criteria are not interdependent, and the order of importanceof all criteria can be rationally explained as acceptable.
6.4 Method of Aggregation
Correct choice of method for aggregation of all alternatives is of high importance, and thus isseen as another critical step in choosing the best anchoring system. MCDM methods are clas-sified into two main groups: compensatory methods and outranking methods [72]. Compen-satory methods involve trading o� good and bad attributes of each alternative. Bad attributesof an alternative can be outweighed by the good ones. The final score of all attributes for eachalternative is then calculated in order to determine the most optimal alternative.
Outranking methods are rather di�erent than compensatory methods. Instead of calcu-lating scores on each alternative, it focuses on eliminating the ones, which are outperformedon enough criteria of su�cient importance. One of the most important features of outrank-ing methods is that it is possible to eliminate alternatives under criteria which are di�cultto compare (or even incomparable), or information for the alternative is missing. Two mostpopular outranking methods are ELECTRE (ELimination and Choice Expressing Reality) andPROMETHEE (Preference Ranking Organisation Method for Enrichment of Evaluations) [72].
Both methods perform pair-wise alternatives comparisons, which makes it easier for thedecision maker to be involved in the process [75, 76]. One of the main advantage of ELECTREmethod is that it considers veto thresholds. Veto threshold is a value decided by a user to a givencriterion. If alternative a outranks alternative b to a given criterion, and the di�erence betweenboth alternatives is greater than the veto threshold value, then alternative b is omitted fromthe decision making. However, the major limitation of ELECTRE method is that it providesincomplete ranking of all alternatives.

6.4 Method of Aggregation 52
The PROMETHEE method can provide complete ranking of all alternatives, however itsmain restriction is that it does not take discordance into account. Concordance and discordanceindexes measure satisfaction and dissatisfaction of choosing one alternative over the other [76].In general, discordance coe�cient measures the strength of evidence against hypothesis thatalternative a is preferred to alternative b. In order to utilise the PROMETHEE method, thedecision maker has to select a preference function. It might pose a challenge in case knowledgeabout the criteria is not su�cient.
6.4.1 PROMETHEE Method
In the PROMETHEE method, the structure of preference is based on pairwise comparisonsbetween the alternatives. For each criterion, the decision maker assigns a preference function,according to which the alternatives are compared and preference is assigned [75]:
Pj(a,b) = Fj[d j(a,b)], (6.6)
where Pj(a,b) is how much a is preferred over b under a given criterion j, given (a,b) 2 A,where A is all alternatives. The function assigned to the criterion is Fj, where d j is di�erencebetween a and b:
d j(a,b) = g j(a)�g j(b), (6.7)
where g j(a) and g j(b) are criterion j values of alternatives a and b.Preference value lies between 0 and 1. Values close to 1 show strong preference of one
alternative over another, and values close to 0 show weak preference of one alternative overanother.
As described before, some criteria have to be minimized and some have to be maximizedin order to find the best solution. Equation (6.6) is applied when criteria has to be maximised.In case a criterion has to be minimized, the preference function is reversed:
Pj(a,b) = Fj[�d j(a,b)]. (6.8)
For each preference function q and/or p parameters have to be identified. Parameter q is athreshold of indi�erence; parameter p is a threshold of strict preference. Preference functionsand the reasoning for how they are assigned to each criterion are described in Appendix B.3.
The summary for each criterion is presented in Table 6.9.

6.4 Method of Aggregation 53
Tabl
e6.
9In
form
atio
nab
oute
ach
crite
riain
orde
rto
use
PRO
MET
HEE
outra
nkin
gm
etho
d.
Crite
riaN
ame
TRL
Anc
horin
gTi
me
Prel
oad
Re-
quire
men
tM
VP
Re-
anch
orin
g
Anc
horin
gat
Wid
eRa
nge
ofA
ngle
s
App
licab
ility
toD
i�er
ent
Surfa
ces
Su�
cien
tA
ncho
ring
Stre
ngth
Crite
riaW
eigh
t0.
0904
0.09
910.
1093
0.12
020.
1332
0.13
990.
1506
0.15
74
Crite
riaTy
pem
axm
inm
inm
inm
axm
axm
axm
ax
Pref
eren
ceFu
nctio
nV-
shap
ep=
8V-
shap
ep=
3V-
shap
ep=
10V-
shap
ep=
12V-
shap
ep=
1V-
shap
ep=
3U
-sha
peq=
0.1
Usu
al
Uni
tle
vel
min
utes
New
tons
scor
e(1
–14)
scor
e(0
–1)
leve
lsc
ore
(0–1
)1
or0

6.4 Method of Aggregation 54
Table 6.10 Global preference matrix for all alternatives.
Self-OpposingDrilling
Sawing MicrospineGripper
TetheredSpike Telescoping
Self-OpposingDrilling
0 0.3154 0.1506 0.2172 0.2172
Sawing 0.0149 0 0 0.2172 0.2172
MicrospineGripper 0.2596 0.4095 0 0.2838 0.3064
TetheredSpike 0.1930 0.3429 0 0 0.0226
Telescoping 0.1804 0.3303 0.0100 0.0100 0
As discussed before (Table 6.3), anchoring strength criterion values for tethered spike andtelescoping system are unknown. For further calculations it is decided to use the value as 1 (thebest score). If neither tethered spike nor telescoping spike score as the best alternative, thenit does not matter what value is assigned for anchoring strength criterion. In that case thesealternatives could not be elected as the best choice in any way.
After the preference values are found for each criterion, matrix can be created to show howone alternative is preferred over the other using [75]:
8>>>><
>>>>:
p(a,b) =k
Âj=1
Pj(a,b)Wj;
p(b,a) =k
Âj=1
Pj(b,a)Wj.
(6.9)
The results are presented in Table 6.10. It can be seen that the strongest preference isof microspine gripper over sawing tool, while the sawing tool over microspine gripper, andtethered spike system over microspine gripper are not preferred at all.
Outranking Flows
Outranking flows can be described as positive or negative. Positive outranking flow valueshows how alternative a outranks all other alternatives. The higher value, the better the al-

6.4 Method of Aggregation 55
Table 6.11 Positive and negative outranking flows for all alternative anchoring systems.
f+ f�
Self-opposing Drilling 0.225 0.162Sawing 0.112 0.349Microspine Gripper 0.315 0.040Tethered Spike 0.140 0.182Telescoping 0.133 0.191
ternative. Negative outranking flow value shows how alternative a is outranked by all otheralternatives. Here, the lower the value, the better the alternative.
Positive outranking flow is defined as:
f+(a) =1
n�1 Âx2A
p(a,x). (6.10)
Negative outranking flow is defined as:
f�(a) =1
n�1 Âx2A
p(x,a), (6.11)
where in both (6.10) and (6.11) f represents value of outranking flow, n is the number of alter-natives, x is each alternative a is compared to. The results of positive and negative outrankingflows are shown in Table 6.11.
PROMETHEE I and II
The PROMETHEE I partial ranking can be obtained from Table 6.11. It shows whether one oftwo alternatives is preferred (aPIb), whether two alternatives are indi�erent (aIIb), or incom-parable (aRIb). The rules of partial ranking are the following [75]:
8>>>>>>>>>>>><
>>>>>>>>>>>>:
aPIb if
8>>><
>>>:
f+(a)> f+(b) and f�(a)< f�(b), or
f+(a) = f+(b) and f�(a)< f�(b), or
f+(a)> f+(b) and f�(a) = f�(b);
aIIb if f+(a) = f+(b) and f�(a) = f�(b);
aRIb if
8<
:f+(a)> f+(b) and f�(a)> f�(b), or
f+(a)< f+(b) and f�(a)< f�(b).
(6.12)

6.4 Method of Aggregation 56
Table 6.12 Complete ranking of anchoring systems alternatives.
Anchoring System f
1 Microspine Gripper 0.2752 Self-opposing Drill 0.0633 Tethered Spike �0.0424 Telescoping �0.0585 Sawing �0.237
Applying the rules from Equation (6.12) to values in Table 6.11, it can be seen none of thealternatives are incomparable or indi�erent.
PROMETHEE II provides complete ranking, when the net outranking flow is considered:
f(a) = f+(a)�f�(a). (6.13)
The higher the net flow, the better the alternative. Complete ranking of anchoring systemsalternatives is provided in Table 6.12.
6.4.2 Discussion
From Table 6.12 it can be seen that the best anchoring system is the microspine gripper. It con-siderably outweighs self-opposing drill, which placed second. Even when the highest scorewas assigned to su�cient anchoring strength criterion for tethered spike and telescoping an-choring systems, in complete ranking they placed only 3rd and 4th. This means that if they hadlower value assigned, the net outranking flow value for these two system would have been evenworse. Finally, the last in the ranking is sawing system.
The main uncertainties in MCDM and particularly in the PROMETHEE aggregation methodlie in finding correct criteria weights, and assigning the right preference functions (as well asparameters). Since both steps are based on human decisions, they could not be performed per-fectly accurately. However, seeing that first-place alternative has the best result with such highdi�erence compared to other alternatives, allows to conclude that application of MCDM to thisdecision making procedure is valid and acceptable, even if some of the weights and functionswere to slightly deviate.

Chapter 7
Primary Mission Drivers
In order to complete preliminary design of the spacecraft, first the primary drivers of the space-craft design have to be identified. Primary mission drivers influence subsystem selection anddesign, which are discussed in the subsequent chapter.
The main identified drivers are mission data-flow, total required DV (change in velocity)budget, and spacecraft pointing accuracy. Each driver is discussed in the sections below.
7.1 Mission Data-Flow
Mission data-flow diagram helps to maximise the chances of mission success and minimisesystem complexity. It shows where the data for reaching mission goals comes from, whatprocessing must be done, and where the results are used [77]. In case of this mission, it is im-portant to see how autonomous the lander is: which data is computed autonomously on-board,and which is communicated from the mothership. The level of lander autonomy will a�ectthe complexity of the lander. The more instruments are installed on-board the mothership, theless complex is the lander. However, it does not mean that the combined result of lander andmothership design is as optimal as possible: communication loads between the two spacecraftbecome higher since in that case the lander needs to get all the instructions from the mother-ship; accuracy of the lander operations reduces. Mission data flow distribution mainly a�ectsAOC (attitude and orbit control), communications, and power subsystems. The main tasks thathave to be executed in order to achieve the goal of the mission are the following: asteroid iden-tification; landing site location determination; lander-asteroid distance determination; landerattitude determination; thrusting sequence for both landing and detumbling calculation.
Mothership is a larger and more powerful spacecraft, since it is responsible for redirect-ing the asteroid. Therefore, its computational resources are assumed to also be larger thanthe resources of the lander. To save computational power of a lander spacecraft, the resources

7.1 Mission Data-Flow 58
of the mothership can be utilised for performing asteroid identification and landing site loca-tion determination tasks. After the tasks are executed, mothership uploads the asteroid-centriccoordinate system together with the landing location coordinates to the lander.
Lander attitude and lander-to-asteroid distance determination should be performed by thelander. These tasks are seen as too risky to dedicate them to the mothership: if these tasks wereperformed by the mothership, they would contain some error due to communication lag, whichcould result into inaccurate or hard landing, or in the worst case, crash to the asteroid surface.The mothership could, however, also monitor the lander in order to increase the redundancy,but this is outside the scope of this thesis.
Asteroid tumbling rate determination task must be performed by the mothership in orderto determine the best landing location site. However since detumbling the asteroid is the lastcritical step for success of this mission, after landing the angular velocity of the asteroid shouldbe measured by the lander again. This needs to be done in case the lander does not landprecisely on the assigned landing location.
Figure 7.1 Data-flow diagram for asteroid detumbling mission. Round shapes denote datasource, rectangles denote tasks, hexagon denotes data end user.

7.2 Delta-V Budget 59
Thrusting sequences for landing and detumbling are also calculated by the lander space-craft, since it is equipped with instruments for position determination and asteroid tumblingrate measurement.
Figure 7.1 shows the structure of data-flow diagram, where white rectangular boxes indicatethe tasks that need to be performed, light grey circles define where the data originates from,dark grey hexagon defines where the data has to go. Instruments are to be defined in thefollowing chapter which completes preliminary spacecraft design.
7.2 Delta-V Budget
DV budget is one of the primary mission drivers. It is used for landing on the asteroid anddespinning it. Required change in velocity later translates into propulsion system requirementsand amount of propellant needed, which might occupy very high fraction of the total spacecraftmass budget.
First, the location where the lander is going to be released from the mothership has to beknown. This is a�ected by the asteroid’s Sphere of Influence (SOI). Then, DV required forlanding on the asteroid can be estimated, which is followed by required DV estimation forasteroid despinning.
7.2.1 Sphere of Influence
The sphere of Influence is the region around a celestial body, where the primary gravitationalinfluence on an orbiting object is that celestial body. This means, that the lander must bereleased further than the SOI radius of the target body, so that the lander is not influenced bythe presence of asteroid, until it becomes active. The radius of the sphere of influence of asmaller celestial body orbiting a larger celestial body in circular orbit, can be estimated usingthe following equation.
rSOI = a⇣m
M
⌘0.4, (7.1)
where a is semi-major axis of the smaller body, m is mass of the smaller body, M is mass ofthe larger body.
As presented in the Table 2.2, the parameters of asteroid 2014 UR are unclear – its diameterranges from 10.6 m to 21.2 m. It is decided to use the upper bound for calculations in order toestimate the highest possible Delta-V requirement. The maximum radius is 10.6 m.
As discussed in Chapter 2, the asteroid is most likely to be C-type or S-type. Since thedensity of S-type asteroids is higher, its value is used for further calculations (r = 2710 kg/m3).Assuming the asteroid to be a spherical body, its mass is estimated to be 1.352⇥107 kg.

7.2 Delta-V Budget 60
The mass of the Sun is 1.9885⇥ 1030 kg, semi-major axis of asteroid’s 2014 UR orbit is0.996 AU. Plugging all values in Equation (7.1) gives the value of the maximum possible SOIradius, which is 80.55 m.
Therefore, after including some uncertainty margin, the distance for releasing the landerspacecraft from the mothership should be 100 m.
7.2.2 Delta-V Estimation: Docking
Knowing that the distance between the asteroid and the lander is 100 m, it is safe to say that thelanding manoeuvre can be treated as rendezvous. Because of the small mass (and thus negligi-ble gravity) of asteroid and spacecraft, the problem is treated as two-body problem: spacecraftorbiting the Sun, and asteroid 2014 UR orbiting the Sun. The goal for the spacecraft is to chaseand dock with the asteroid. Both the interceptor (spacecraft) and the target (asteroid) are orbit-ing in the same circular orbit and are very close to each other. The set of linearised di�erentialequations which solve nearby relative motion problem are called Clohessy-Wiltshire or Hill’sequations of relative motion.
The derivation procedure of the equations is described by Vallado [13], and is referred tohere. The Satellite Coordinate System, RSW , is used. Such system moves with the satellite:R-axis is collinear with the position vector, S-axis is positive in the direction of the velocityvector aligned with the local horizon, and Y -axis is normal to the plane orbit. In the derivationsof the equations xyz notation for RSW components is used. The figure of the coordinate systemcan be found in Appendix C. The derivation of equations below and relevant assumptions arealso explained in Appendix C.
The change in velocity required for the spacecraft to dock with the asteroid is calculatedusing the following Clohessy-Wiltshire equations:
8>>>>><
>>>>>:
y0 =(6x0 (wt � sinwt)� y0)w sinwt �2wx0 (4�3coswt)(1� coswt)
(4sinwt �3wt)sinwt +4(1� coswt)2 ,
x0 =�wx0 (4�3coswt)+2(1� coswt) y0
sinwt,
z0 =�z0w cotwt,
(7.2)
where x0,y0,z0 is initial position of the spacecraft, t is rendezvous time, w is angular velocityof the asteroid around the Sun which is calculated as follows:
w =
sµ
r3tgt
, (7.3)

7.2 Delta-V Budget 61
Figure 7.2 Delta-V required to dock with asteroid 2014 UR versus rendezvous time.
where µ is standard gravitational parameter (µ = 1.327⇥ 1020 m3s-2 for the Sun), rtgt is thesemi-major axis of target body’s orbit (rtgt = 0.996 AU for the asteroid 2014 UR).
As previously discussed the lander spacecraft is released from the mothership at 100 mdistance behind the asteroid. For simplicity, it is assumed that the spacecraft is released in thesame orbit as the asteroid. Thus, the initial position of the spacecraft is x0 = 0, y0 = �100,z0 = 0. Using Equation (7.3), the angular velocity of the asteroid 2014 UR around the Sun isestimated to be w = 2.0035⇥10�12 rad/s.
Substituting all values into Equation (7.2), and estimating the initial velocity of the space-craft, for docking with the asteroid from t = 0 to t = 15 minutes, the graph in Figure 7.2 isobtained.
It can be seen that the DV requirement for docking is very small. Docking under one minutecan be achieved with DV of slightly more than 1.5 m/s. As the rendezvous time increases, DVrequirement decreases, until it becomes almost negligible. However, it is important to note,that in a real case scenario before landing, the spacecraft has to match the rotational rate of theasteroid, i.e. has to orbit the asteroid so that the same spot of the asteroid is always visible. Inthis case, DV needed just to reach the asteroid was calculated.
Hovering Above The Asteroid
An approximate estimation of how much DV is needed for matching asteroid’s rotational rateand hovering about the surface, can be roughly estimated from DV requirements for dockingwith the asteroid, which are calculated above. For more accurate estimation, the change invelocity in x- and z-axis should also be included, since the lander travels around the asteroid,rather than in the same direction. However, for simplicity, the value is taken from the calcula-tions made above, since only an approximate estimation of expected DV value is su�cient.

7.3 Pointing accuracy 62
The maximum perimeter of the asteroid, assuming its spherical shape, is 66.6 m (when ra =
10.6 m). The maximum possible asteroid’s rotational period about xy-axis (refer to Chapter 3)is 10 min (rotation about z-axis is almost negligible). Thus, in order for the spacecraft to hover5 m above the same spot of the asteroid, it means that the spacecraft has to travel 97.4 m in 10minutes. From Figure 7.2 it can be seen that to travel 100 m in 10 min requires DV of roughly0.2 m/s. Thus it can be concluded that to hover around the asteroid for 5 rotations (50 min)should require approximately 1 m/s of DV budget.
7.2.3 Delta-V Estimation: Despinning
The second part for which is necessary to estimate the required change of velocity is despinningthe asteroid.
Despinning can be seen as changing asteroid’s rotational velocity to 0 rad/s. Rotationalvelocity of a sphere can be related to linear velocity as follows:
VVV lll = www ⇥ rrraaa, (7.4)
where VVV lll is linear velocity. Same as in Chapter 3, best case and worst case scenarios arecalculated. For more details on both scenarios please refer to the aforementioned chapter.
Having angular velocity of www = [0,0,0.00074]T rad/s in the best case scenario, and landinglocation at rrraaa = [5.3,0,0]T m, the linear velocity is 0.0039 m/s.
Having angular velocity of www = [0.01,0.01,0.00074]T rad/s in the worst case scenario, andlanding location at rrraaa = [7.4953,�7.4953,0]T m, the linear velocity is 0.1501 m/s.
7.3 Pointing accuracy
Pointing control requirement drives AOC subsystem design, which is responsible for determin-ing the attitude of the spacecraft, and re-orienting (or holding) it to predefined attitude. Themore accurate pointing is required, the heavier and more power consuming sensors and actua-tors have to be selected. In case of this mission, the pointing information is needed in order toland on desired location in desired orientation on the asteroid.
Pointing accuracy defines the range within which the spacecraft must be pointing in or-der to accomplish the mission goals. Right after the release of the lander spacecraft from themothership, the lander must be able to track the asteroid and the targeted landing location.Thus, the required minimum pointing accuracy can be estimated as an angle (at a 100 m space-craft release distance) which ensures the asteroid is always in the range of spacecraft view – asdepicted in Figure 7.3.

7.3 Pointing accuracy 63
Figure 7.3 Scheme for estimating required maximum pointing angle to the asteroid 2014 UR,just after spacecraft release from the mothership.
For simplicity the asteroid is assumed to be of a spherical shape. To have a conservativepointing accuracy estimation, its radius is taken as the smallest possible radius of 5.3 m. Thus,the angle qlim is calculated to be 3.03�, meaning that the pointing accuracy must be at least6.07�. If the landing sequence was calculated at 5 m above asteroid surface, the spacecraftwould land within 0.265 m radius of assigned location.

Chapter 8
Preliminary Spacecraft Design
As primary drivers for the spacecraft design have already been identified in the chapter before,the spacecraft can now be partitioned into its subsystems, each of which are discussed in thischapter in more detail.
The propulsion system, acting as a payload since it helps to accomplish the main mis-sion goal, is needed for landing the spacecraft and detumbling the asteroid. In order for thespacecraft to land on the asteroid, it must have some type of attitude control. It can consistof thrusters, or reaction wheels, or both. After landing, the spacecraft has to anchor itselfto the surface with the use of a microspine gripper. The spacecraft also needs to be able tocommunicate with the mothership in order to send data and receive instructions. All the com-putations are to be performed with an on-board computer, which is part of the command anddata handling system. Finally, some sort of power system is needed to power all of the pro-cesses described above. Thus, the spacecraft shall be partitioned into the following subsystems:propulsion (payload), anchoring (microspine gripper), attitude and orbit control, command anddata handling, communications, power, thermal, structure.
8.1 Attitude and Orbit Control Subsystem
Attitude and orbit control subsystem (AOCS) is responsible for determining the attitude of thespacecraft, and re-orienting (or holding) the spacecraft to the predefined attitude. The finalmass and power budget of AOC subsystem is given in Table 8.1. The explanation of eachcomponent and its selection process is provided in the following subsections.

8.1 Attitude and Orbit Control Subsystem 65
Table 8.1 Mass and power budget for AOC subsystem.
Component # Mass, kg Power, W
3-axis star tracker 1 0.9 2.5Fine sun sensors 4 4⇥0.035 4⇥0.130IMU 1 0.055 2Laser altimeter 1 1.5 7
Total 2.595 11.05
Based on dimensions of the components, AOC sub-system occupies 1.5U of volume.
8.1.1 Actuators
For attitude control two main techniques are typically used [77]: spinner, and three-axis sta-bilised. Spinner is an old stabilisation technique, working by the same principle as spinninglanders already described in Section 4.1.1. Three-axis stabilisation is a modern, most com-monly used technique. It takes four parameters to describe the attitude: 3 defining a vector ininertial space, and 1 for rotation about that vector. Attitude control can be performed by reac-tion wheels, thrusters, or a combination of both. The highest precision pointing is achieved byusing reaction wheels, while thruster type control method is typically enough for lower accu-racy pointing applications. The disadvantage is that the momentum collected by the reactionwheels has to be removed. This can destabilise the spacecraft or thrusters have to be used inorder to counteract the torque. Since the thrusters are already needed for asteroid detumbling,the goal is to also utilise them for spacecraft attitude control. This simplifies not only the space-craft design, but also saves mass, which is one of the primary objectives of this study. Reactionwheels shall be included in the design, only if the precision provided by the propulsion systemis not su�cient.
The required pointing accuracy can typically be achieved with thrusters for attitude controlor reaction wheels. The pointing accuracy achievable with thrusters only (designed for attitudecontrol) ranges between 0.1� and 1� [77], if reaction wheels are employed spacecraft pointingcan be even more accurate. It is important to note, however, that the aforementioned pointingrange achievable with thrusters only depends on the selected propulsion system. Therefore, it isnecessary to know how the parameters of the propulsion system relate to the required pointingaccuracy.

8.1 Attitude and Orbit Control Subsystem 66
Figure 8.1 Attitude control motion in two dimensions [12].
Minimum Impulse Bit
Pointing accuracy of thrusters for attitude control can be estimated by knowing their mini-mum impulse bit. Minimum impulse bit is the impulse achieved by firing the thruster for theshortest possible time. Typically, the time mainly depends on the shortest valve opening time.Minimum impulse bit can be calculated as follows [78]:
Ibit =Z to�
tonF(t)dt, (8.1)
where ton and to� are valve opening and closing times, and F is force generated by propulsionsystem. The smaller Ibit value is, the more accurate pointing can be achieved.
The attitude control process in two dimensions is illustrated in Fig. 8.1 (with negligibleexternal torques). When the vehicle reaches maximum allowed rotational displacement qlim,thrusters are fired in opposite direction, which reverses the spacecraft rotation. The burn timefor which the thrusters are fired is denoted as tb (= to��ton). With constant angular rate vehiclethen rolls until qlim is reached again. The time during which the spacecraft rolls with zeroacceleration is called dead band time. The relationship between dead band time and burn timecan be expressed as follows [12]:
tb =4qlimIv
tdb nFl, (8.2)
where Iv is spacecraft moment of inertia about the rotational axis, n is number of thrustersfiring, F is thrust provided by one thruster, l is moment arm from thruster to centre of mass.
Minimum impulse bit varies with dead band time, depending on final spacecraft size, andforce provided by the propulsion system. If the estimated required minimum impulse bit issmaller than what the propulsion system can provide, reaction wheels must be employed inthat case.

8.1 Attitude and Orbit Control Subsystem 67
The moment arm and moment of inertia for each of 3U, 6U, 12U, and 27U CubeSat con-figurations are listed and their calculation procedure explained in Appendix D.1, when twothrusters are fired simultaneously. As estimated in Section 7.3, the maximum allowed rota-tional displacement is 3�. Finally, commercially available thruster valves for miniature propul-sion systems have shortest opening and closing times of roughly 10 ms in total (one of theleading manufacturers for space-graded fluid control components is VACCO). Thus, the min-imum dead band time, with some delay included, could be 20 ms. Equation (8.2) can then berearranged to express maximum thrust value, with which the required minimum impulse bitcan be achieved.
For all configurations ranging from 3U to 27U CubeSats, the maximum allowed force forsu�cient attitude control is estimated to be above 70 N, which shows that reaction wheelsare not needed to achieve the required pointing accuracy of 6�, since propulsion systems forCubeSats most certainly have lower thrust available. Therefore, actuators for AOC subsystemare not needed, as the propulsion subsystem thrusters can be utilised for attitude control. Intotal, 12 thrusters are needed for full attitude control: 4 thrusters for rotation around a singleaxis (2 for rotation in one direction).
8.1.2 Sensors
The AOCS hardware is completed with a set of sensors required to determine the attitudeand help to navigate the spacecraft to the landing location. Traditionally, the sensor selectionmainly depends on whether the spacecraft is Earth-pointing, Sun-pointing, or inertial-pointing,and on the required accuracy. For deep space missions the most commonly used sensors aregyroscopes, sun sensors, and star trackers [77]. Gyroscopes, combined with external star or sunsensors, are used for precision attitude determination. Without any knowledge of external ref-erence, gyroscopes measure angle or rotation of the spacecraft with respect to initial reference.Star or sun sensors can provide additional information, which helps to counteract gyroscopeerrors such as drift bias. Full attitude knowledge can also be attained by using a single pieceof hardware – 3-axis star trackers. Solar sensors can then be added for redundancy.
The distance between the asteroid and the lander has to be tracked. This is especially impor-tant for hovering and landing phases. Knowing that the asteroid might be of irregular shape andis likely to be tumbling, safe hovering above the selected landing location, and then accuratelanding are of crucial importance for successful mission execution. Laser or radar altimetersare typically used for distance measuring in space missions.
3-axis star tracker. Even though star trackers are more expensive than sun sensors, theyprovide much better accuracy. As explained in the subsection before, a 3-axis stabilised system

8.1 Attitude and Orbit Control Subsystem 68
is chosen for this mission. Therefore, at least two external non-parallel vector measurementsare required. Each identified star acts as a reference vector in 3-axis star tracker system, whichmeans that a single component can determine full 3-axis attitude.
VECTRONIC Aerospace o�ers a 3-axis star trackers for space applications [79]. Theirproduct “Star Tracker VST-41M” is suitable for deep space missions and already has flightheritage from previous small satellite missions. The mass of the tracker ranges from 7 to 9 kg,and maximum power consumption is 2.5 W. Achieved accuracy for x-,y- and z-axis is 18, 18and 122 arc-seconds respectively. Operating temperature ranges from �20� to +65� C. Thestar tracker occupies 80⇥100⇥180 mm3 of volume space.
Fine sun sensors. Knowing the attitude of the spacecraft at all times is crucial for the successof the mission, therefore it is decided to also have redundant sensors. Sun sensors are chosensince they occupy small mass and volume and their power requirements are low. Sun sensorworks by determining the spacecraft’s orientation with respect to the Sun.
NewSpace Systems o�ers sun sensors with flight heritage since 2007. Their product “Fine(digital) Sun-Sensor NFSS-411” o�ers higher than 0.1� accuracy [80]. The field of view of140� means that only 4 sensors are enough to have full sky coverage. Each sensor weighs 35 gand occupies 34⇥ 32⇥ 20 mm3 of volume space. Average power consumption is 37.5 mW,while peaks measure up to 130 mW. Operational temperature range extends from �25� to+70� C.
Inertial Measurement Unit (IMU). In order to finish the subsystem for precise attitude de-termination, gyroscopes have to be added. A single gyroscope provides angular velocity aroundone or two axes. Quite often they are grouped together for full three axes measurements as aninertial reference unit (IRU). IRUs with added acclerometers and inclinometers for positionand velocity sensing are called IMUs.
Sensor product “STIM300” is an IMU consisting of 3 gyros, 3 accelerometers, and 3 incli-nometers [81]. The product weighs less than 55 g and consumes maximum of 2 W of power.The operating temperature ranges from �40� to +85� C. It occupies 35 cm3 of volume space.Even though it is a space-grade product, the information about flight heritage is not provided,nor about the suitability for deep space missions.
Laser altimeter. Currently no o�-the-shelf laser altimeters are known to exist for CubeSatmissions. Lidars flown on previous space missions typically occupy large volume space andhave high power requirements. Thus, a solution of a compact and accurate altimeter is needed.

8.2 Propulsion Subsystem 69
Table 8.2 Mass and power budget for propulsion subsystem (considering best case spinningasteroid scenario).
Component # Mass, kg Power, W
PM200 thruster 4 4⇥0.35 4⇥6Propellant - 1.5 -Propellant tank and other equipment - 3 -
Total 5.9 24
Based on the dimensions of the components, propulsion subsystem oc-cupies 4U of volume.
Compact laser altimeter (CLA) is being developed at Johns Hopkins University AppliedPhysics Laboratory [82]. CLA is expected to weigh less than 1.5 kg, consume less than 7 W ofpower. It occupies around 1U of volume. The range resolution is less than 0.03 m (at closestapproach), and horizontal accuracy of 1 cm at 1 m distance. The maximum operational range is1–2 km. The technology is indeed impressive and fills the gap in the market of small spacecrafttechnologies. The latest information regarding the project dates back to 2012, however itscurrent progress is unclear.
8.2 Propulsion Subsystem
The propulsion subsystem is used for docking with the asteroid, as well as for despinning theasteroid, which is the main goal of the mission. Therefore, the propulsion subsystem can alsobe seen as the payload of the spacecraft. The biggest contributor to the mass and volume ofthe propulsion system is the propellant needed. The total change needed in velocity dominatesthe propellant budget. Mass and power budgets are provided in Table 8.2. The estimationprocedure and selection of each component is provided in the text below.
8.2.1 Propellant Budget
The required propellant budget estimation is performed in two steps: (1) propellant required fordocking with the asteroid; (2) propellant required for despinning the asteroid. The relationshipthat links DV with propellant and initial mass is [77]:
DV = Isp g lnm0
m f, (8.3)

8.2 Propulsion Subsystem 70
where Isp is specific impulse of the propulsion system, g is gravity of the Earth (9.81 m/s2),m0 is initial mass, and m f is final mass. Propellant can be estimated as the di�erence betweeninitial and final mass: mprop = m0 �m f . Specific impulse of the propulsion systems can beup to around 8000 s, considering the most modern electric propulsion technologies which arecurrently under development [83].
Propellant Required for Docking With The Asteroid
As explained in Chapter 7, the DV required for docking with the asteroid depends on howfast the procedure has to be performed. 1.5 m/s is required for reaching the asteroid within 1minute, and 1 m/s is required for hovering above the asteroid for 50 minutes (taken the worstcase scenario, when asteroid is tumbling fast). Thus, including some safety factor and takinginto account that the both steps of the landing procedure might be needed to be performedslower, the total change in velocity for docking then is assumed to be DV = 10 m/s.
The initial spacecraft weight is taken for 27U, 12U, 6U, and 3U CubeSats to be 54 kg, 24 kg,8 kg, and 4 kg respectively. Please note, that using di�erent CubeSat dispensers the weight perunit can either be 1.33 kg or 2 kg. Typically, CubeSats up to 6U weigh 1.33 kg per unit, whilelarger CubeSats can weigh up to 2 kg per unit.
It can be seen from Fig. 8.2 that propellant weight required decreases significantly with highIsp. Thus, required propellant budget strongly depends on what propulsion system is chosen.
Propellant Required for Despinning The Asteroid
In order to find propellant required for despinning the asteroid, despinning procedure is treatedas change of linear velocity to 0 m/s. The linear velocities for best and the worst cases are
Figure 8.2 Propellant required for docking with the asteroid 2014 UR for di�erent spacecraftsizes and di�erent specific impulses.

8.2 Propulsion Subsystem 71
0.0039 m/s and 0.1501 m/s respectively (refer to Chapter 7). However, in this case, the weightof overall mass that has to be despun is m0 = ma +msc. Compared to the possible asteroidmass ranging from 861⇥ 103 kg to 1.352⇥ 107 kg, the spacecraft mass can be consideredto be negligible. As mentioned earlier, the linear velocity for the best and the worst cases is0.0039 m/s and 0.1501 m/s respectively.
Figure 8.3 shows required propellant for di�erent specific impulse propulsion systems. Itcan be seen that the range of required propellant mass is very wide, which is due to vagueknowledge about the asteroid. When comparing both Fig. 8.2 and 8.3, it can be seen that themass of propellant needed for asteroid despinning is much higher than propellant needed fordocking with the asteroid.
8.2.2 Subsystem Choice
The propellant required for despinning the asteroid is significantly higher, therefore the pro-pellant needed for docking with the asteroid is seen as negligible. Knowing that the maximumspacecraft weight can be 54 kg, the propellant should occupy not more than 40 kg of the totalspacecraft mass budget (leaving 14 kg for other subsystems). From Fig. 8.3 it can be seen thatIsp should be higher than 100 s for the best case scenario. Isp should be higher than ⇠ 5100 sfor the worst case scenario.
Worst Case Scenario
No chemical or cold gas propulsion systems can provide high enough Isp. Specific impulseof electrical propulsion systems can range up to 8000 s. Electrical propulsion can be further
Figure 8.3 Comparison of propellant required for despinning fast spinning and slow spinningasteroid 2014 UR for di�erent specific impulses.

8.2 Propulsion Subsystem 72
separated into following systems: resistojet, arcjet, ion thruster, solid pulsed plasma (PPT),magnetoplasma dynamic (MPD), hall thruster. Out of all listed systems only ion thruster canprovide high enough Isp value, which ranges from 1500 s to 8000 s [83]. The thrust rangestypically from 0.01 mN to 500 mN, which means that the shortest possible asteroid despinningtime in this case is around 27 Earth days (estimation procedure can be found in Section 3.6).
Two propulsion system candidates were found to have specific impulse value higher than5200 s: Alta FEEP-150 and IFM Nano Thruster [83, 16]. Qualification phase of Alta FEEP-150 thruster was expected to take place in 2010, however no updates have been found since2009. The thruster was being developed for LISA Pathfinder mission by ESA. However, sincecold gas propulsion system was chosen for the mission instead [84], the development of FEEP-150 might have been stopped. The IFM Nano Thruster by Enpulsion has been developed forCubeSat missions in order to meet high DV and low available power requirements. 5000 s ofspecific impulse can be achieved within 25 W to 40 W of system power [17]. Maximum thrustin this case is only around 0.32 mN. With such small thrust the asteroid despinning would take8 years, which most certainly is too long.
Therefore, it can be concluded that it is impossible to design a CubeSat for detumbling theasteroid for the worst case scenario, by using COTS propulsion systems for detumbling.
Best Case Scenario
The list of propulsion systems considered for the best case asteroid despinning scenario areprovided in Table 8.3. All considered propulsion systems have Isp higher than 100 s. Themaximum time set for asteroid despinning is 100 days. Considering that asteroid redirectionmissions could last a couple of years, one third of a year for despinning the asteroid seemsto be a reasonable time period. As the mission time increases, so does the complexity of thespacecraft, since all the components have to be operational for longer times. To despin theasteroid within 100 days the thrust T has to be higher than 0.155 mN, but lower than 7 N inorder to meet the accuracy requirement. The system has to consume less than 80 W of power(P), leaving some margin for other subsystems since 100 W is the maximum that the 27Usatellite can provide, refer to Chapter 6). Comparison of systems TRL (technology readinesslevel) is also provided.
Compared to the asteroid, the spacecraft mass is negligible, thus the initial mass is massof the asteroid only (mast = 860,588 kg). DV is 0.0039 m/s for despinning the asteroid. Theequations used for calculating despinning time and propellant required are Equation (3.8) andEquation (8.3).
It can be seen from Table 8.3, that as the specific impulse of the propulsion system de-creases, the thrust value increases. Chemical propulsion systems show advantage over elec-

8.2 Propulsion Subsystem 73
Table 8.3 Comparison of di�erent propulsion systems performance for the best case scenario[16–21].
System T, mN Isp, s P, W tdespin, days mprop, kg TRL
Electrospray propulsionAccion TILE 5000 1.5 1500 30 10 0.228 NFAccion TILE 500 0.4 1250 8 39 0.274 NFBusek BET-1mN 0.7 800 15 22 0.428 5
Ion propulsionBusek BIT-3 1.4 3500 60 11 0.098 5Enpulsion IFM 0.4 3500 40 39 0.098 NF
Chemical propulsionNanoAvionics EPSS 100 225 7.5 3.7 hours 1.521 9Aerojet Rocketdyne GR-1 1100 235 12 20.35 min 1.456 6ECAPS HPGP 100mN 100 225 8 3.7 hours 1.521 6/7ECAPS HPGP 1N 1000 225 10 22.4 min 1.521 9Tethers HYDROS 1200 310 25 18.7 min 1.104 6/7Busek BGT-X1 100 214 4.5 3.7 hours 1.6 5Busek BGT-X5 500 225 20 44.8 min 1.521 5Hyperion PM200 500 285 6 44.8 min 1.2 NF
NF – not found.
trical propulsion systems in higher available thrust, and lower power requirement. Previouslyused hydrazine is currently not favoured anymore – its high toxicity makes it di�cult to workwith. Recently hydrazine has been replaced by so called “green” propellants, most of whichare ammonia- or water-based. Therefore, only “green” propellant systems are considered.
The Isp of chemical propulsion systems ranges from 225 s to 310 s, which can despin theasteroid in as little as 18.7 min to as long as 3.7 hours. It is significantly shorter compared to10 to 52 days of despinning period that electrical propulsion systems can o�er. Power require-ments for chemical propulsion systems are also lower (4.5 W to 25 W) compared to powerrequirements for electrical propulsion systems (8 W to 60 W). However, due to their low spe-cific impulse, chemical propulsion systems need more propellant. 1.1 kg to 1.6 kg of propellantmass is needed for chemical propulsion systems, while only 0.09 kg to 0.34 kg is needed forelectrical propulsion systems.
Higher requirement for propellant mass for a chemical propulsion system is acceptable,considering much lower power consumption and shorter despinning times.

8.3 Anchoring Subsystem 74
Thruster. PM200 system developed by Hyperion is chosen as the best candidate for asteroiddespinning mission (assuming best case scenario), even though it has slightly longer despinningtime compared to HYDROS, HPGP 1N and GR-1. Moreover, due to its higher specific impulseof Isp = 285 s, less propellant is needed. The system is sold as a complete propulsion systemwith thruster, propellant tank, pipes and valves integrated [21]. A standard system, fittingwithin 1U, can accommodate only 0.31 kg of propellant, thus, for this mission the propellanttank has to be larger. The disadvantage is that the system has not been flight-proven yet, andits TRL is unclear.
Hyperion does not provide thruster mass, but considering that HPGP 1N thruster mass is0.38 kg, slightly lower value can be expected for PM200 0.5 N thruster. Thus, including somesafety factor, 0.35 kg is chosen for mass of the thruster.
Propellant. PM200 is a bi-propellant propulsion system, operating on nitrous oxide andpropene. The propellant has to be stored at 9 bar and oxidiser at 45 bar. Pressurisation re-quirement increases lander design complexity, since it must be ensured that the system willnot leak for long duration. Propellant mass is 1.5 kg (refer to Table 8.3), with safety factorincluded.
Propellant tank and other equipment. Hyperion lists that the full PM200 propulsion sys-tem dry mass (including thruster) is 1.1 kg. Excluding thruster the mass would be around0.75 kg. For this mission four times more valves, more complex piping and heavier propellanttank are needed. Thus, the total system dry mass excluding thrusters is expected to be around3 kg. Power required for operating valves is considered to be negligible.
Operating temperature of the whole system ranges from �5� to +35� C. A single-thrustersystem designed by Hyperion occupies 1U.
8.3 Anchoring Subsystem
The anchoring subsystem is responsible for anchoring the spacecraft to the asteroid surface.As described in Chapter 6, selected system is microspine gripper. Mass and power budgets areprovided in Table 8.4. The subsystem is expected to occupy less than 1U of CubeSat volume.
Operational temperature requirements for the system were not found. However, since mi-crospine gripper was supposed to be employed for NASA ARM (Asteroid Retrieval Mission)mission, it is expected to be able to operate in su�ciently wide range of temperatures.

8.4 Communications Subsystem 75
8.4 Communications Subsystem
Communications subsystem provides the link between the lander spacecraft and the mother-ship, while mothership communicates with the Earth. The choice of communication banddepends on data rate requirements, and distance. Mass and power budget for communicationssystem is provided in Table 8.5
For this particular mission, there is no science data to be transmitted to the mothership.Moreover, the distance between the mothership and the lander is small. Therefore, it can beassumed that low gain antennas on both mothership and lander spacecraft will su�ce. Linkswith low antennas typically operate at lower frequencies such as VHF and UHF (very highfrequency and ultra high frequency) [77]. The band for VHF is 30 MHz to 300 MHz. Theband for UHF is 300 MHz to 3 GHz.
The lander has to transmit telemetry to the mothership and receive corrections for landinglocation or detumbling force (magnitude and direction). Telemetry includes lander subsystemstemperature, propellant tanks pressure, power consumption and generation, attitude, systemchecks, battery state. Telemetry is expected to be sent every 5 minutes during landing anddetumbling operation, so that relevant corrections can be made if needed. Telemetry downlinkdata rates for deep space missions typically has ranges from 5 kb/s to 10 kb/s [77]. Since thespacecraft is small, less telemetry is expected, thus lower end data rate requirement of 5 kb/sis selected. Uplink data rates are not expected to be any higher than 5 kb/s, since only land-
Table 8.4 Mass and power budget for anchoring subsystem.
Component # Mass, kg Power, W
Microspine gripper 1 1.05 10
Total 1.05 10
Based on dimensions of the components, anchoringsubsystem occupies 1U of volume.
Table 8.5 Mass and power budget for communications subsystem.
Component # Mass, kg Power, W
Transceiver 1 0.075 4Low gain antenna 1 0.1 0.6
Total 0.175 4.6
Based on dimensions of the components, communi-cations subsystem occupies less than 0.2U of volume.

8.5 Other Subsystems 76
ing/detumbling corrections are to be received. Thus, it is assumed that no more than 1250 kbis needed to be sent and received every 5 minutes.
Transceiver. UHF downlink/VHF uplink transceiver developed by ISIS meets the data re-quirement [85]. Its downlink data rate is 9600 bps, which allows to send 2880 kb of data in 5minutes. Uplink data rate is the same. Power consumption is only 0.48 W for receiving, and4 W for transmitting. Transceiver weighs only 75 g and measures 90⇥96⇥15 mm3 (a singlestandard CubeSat size PCB). Operational temperature range is from �20� to 60� C.
Antenna. A CubeSat dipole deployable antenna, also developed by ISIS, is designed to fit theaforementioned transceiver [86]. It has low weight and low power consumption (0.1 kg and0.6 W), and is compatible with both UHF and VHF. Operational temperature range is from�20� to 60� C.
8.5 Other Subsystems
This section provides an approximate estimation of command and data handling (C&DH) andthermal subsystems requirements based on previous deep space missions. The mass of theCubeSat structure is based on the mass of 1U, as explained below.
8.5.1 Command and Data Handling Subsystem
C&DH subsystem is responsible for distributing commands to other subsystems, collectingtelemetry from the subsystems, storing and collecting data, and forwarding the data to themothership via the communications subsystem. The complexity of C&DH depends on thedata flow rates requirements.
Table 8.6 Mass and power budget for C&DH subsystem, thermal subsystem and spacecraftstructure.
Subsystem # Mass, kg Power, W
C&DH 1 0.567 7.48Thermal 1 0.85 10.72Structure 12 12⇥0.0872 -
Total 2.246 17.68

8.6 Power Subsystem 77
As CubeSat missions are getting more complex, more powerful C&DH systems are avail-able. Traditionally they are developed for the baseline PC/104 board dimension, which can bestacked together in modules if more computational power is needed [16].
It is known, that C&DH for traditional tasks of CubeSats consume less than 1 W of power.However, in this case autonomous navigation is included, thus the higher computational load.Preliminary subsystem estimates can be drawn from similar deep space missions: an averageof 11% of total power is used for powering on-board processing system [77]; subsystem weighsan average of 4% of total spacecraft mass.
8.5.2 Thermal Subsystem
Most of the components operational temperature lies within �20� to +60� C range, which isa common operational temperatures range of components designed for space missions. Thepropulsion system has a bit tighter operational temperature requirements: �5� to +35� C.
Traditionally, in order to minimise the heating required to keep the components withinrequired temperature range, passive thermal control systems are used [16]. They require nopower input and are lightweight. Most commonly used passive thermal control systems includecoatings and films. It is also important to remember, that thrusters might get hot during theoperation, thus the excess heat must be dissipated.
For deep space missions an average thermal control system occupies 6% of the total space-craft mass, and consumes 15% of the total spacecraft power [77].
8.5.3 Structure
Di�erent size CubeSats are designed by stacking the required amount of cubes (each measures10⇥10⇥10 cm3) together. The largest CubeSat can measure up to 27U. CubeSat manufactur-ers such as ISIS develop CubeSat structures of di�erent sizes. A 1U CubeSat structure weighs87 g. So far, without C&DH, thermal, and power subsystems, other subsystems occupy lessthan 8U. Thus, completed satellite should not be larger than 12U. The weight of 12U structureis 1.05 kg.
8.6 Power Subsystem
The power subsystem is responsible for generating, storing and distributing power. The majordesign driver is power consumption of the spacecraft. Power can be generated during the mis-sion, and spacecraft can use the energy stored in the battery. The mass and power budget for

8.6 Power Subsystem 78
the subsystem is provided in Table 8.7. Explanation of components’ choice is provided in thetext below.
The mission can be divided into three smaller phases: landing, anchoring, despinning. Notall subsystems need to be activated during each phase. During landing, microspine gripperis not used. During anchoring, since procedure is very short, communications system is notactive. During despinning, the microspine gripper is not active since its normal position islocked.
The requirement for total power is provided in Table 8.8. It can be seen that the highestpower consumption is during the anchoring phase is 63.18 W.
Solar arrays. Preferably, only body-mounted solar arrays should be considered due to com-plex landing and docking procedures, which could break any deployable structures in case ofimpact.
ISIS produces solar cells of 1367 W/m2 and 30% e�ciency [87]. A 64 cm2 area of a solarcell is placed on 10⇥10 cm2 panel. Using 5 sides of 12U CubeSat (leaving the bottom 20⇥20 cm2 side for anchoring system), in total 28 such panels can be accommodated. 1792 cm2
of total solar cell area provides 73.5 W of power. Total mass of 28 panels is 1.4 kg.It is important to note, that as the incident angle of the Sun increases, power generated by
the solar panel decreases. Thus, if one side of the CubeSat is facing the Sun at 0�, Sun rays donot reach the other sides of the CubeSat. Therefore, the CubeSat should have deployable solarpanels, or the use of fuel cells should be considered.
Electrical power system (EPS). Assuming the best case scenario, the asteroid is spinningwith a 2.37 h period, meaning that when landed, the spacecraft is in eclipse for 1.19 h. In orderto carry on with the despinning phase, the power supply has to continue. 57.8 W of power isneeded for despinning, thus required power capacity is 68.5 Wh.
Table 8.7 Mass budget for power subsystem.
Component # Mass, kg
Solar panels 28 28⇥0.05Electrical power system 3 3⇥0.195
Total 1.985
Based on dimensions of the components, com-munications subsystem occupies 0.2U of vol-ume.

8.7 Mass and Power Budget 79
Table 8.8 Total power requirement for each of the three mission phases.
Subsystem Power, W Landing Anchoring Despinning
AOCS 11.5 on on onPropulsion 24 on on onMicrospine gripper 10 o� on o�Communications 4.6 on o� onC&DH 7.48 on on onThermal control 10.2 on on on
Total 57.78 W 63.18 W 57.78 W
EPS developed by NanoAvionics has a 2-cell battery configuration, voltage regulator, andpower distributor. The battery provides 3.2 Ah battery capacity and 23 Wh power capacity[88]. Voltage per battery cell is 7.2 V, thus voltage of the whole battery is 14.4 V. To meet therequirement of battery voltage, at least 6 solar cells have to be connected in series (knowingthat voltage per solar cell is 2.4 V [87]). As mentioned above, a single 10⇥10 cm2 panel hastwo solar cells. Thus, a custom made 30⇥ 10 cm panel could have six solar cells. In orderto reach the required 68.7 Wh capacity, 3 such 2-cell battery packs need to be used. 1 batterypack weighs 0.195 kg, and measures 92.9⇥89.3⇥25 mm3.
8.7 Mass and Power Budget
Total mass and power budget of all the subsystems is provided in Table 8.9. This CubeSat con-figuration is designed to land on and despin an asteroid, assuming the best case scenario (refer
Table 8.9 Total mass and power budget.
Subsystem Mass, kg Power, W
AOC 2.595 11.05Propulsion 5.9 24Anchoring 1.05 10Communications 0.175 4.6C&DH 0.567 7.47Thermal 0.85 10.72Power 1.985 -Structure 1.046 -
Total 14.148 63.18

8.7 Mass and Power Budget 80
to Chapter 3 for best case scenario definition). In case the asteroid is of 21.2 m in diameter andis tumbling with high angular velocity, the only CubeSat-compatible propulsion system exist-ing would be able to detumble it in over 8 years. In this case the mission is not only impossiblebecause of the high longevity requirement of all subsystems, but it also is unreasonably long.
The volume of the CubeSat is 7,892 cm3, which is just over 8U. However, taking intoaccount the volume required for harness and mechanisms, as well as some safety factor, thesize of the spacecraft would easily exceed 8U. Therefore, it can be concluded that the minimumpossible smallest size of the CubeSat is 12U.
Important to note, however, that not all required components and subsystems are o�-the-shelf or even available yet. The laser altimeter required for determination of distance betweenasteroid and lander is only being developed. The microspine gripper is not designed to be suit-able for CubeSats, thus its integration might be more di�cult. C&DH o�-the-shelf subsystemsare o�ered for more simple missions, which do not require navigation. Thus, it can be sum-marised that although it is somewhat possible to utilise the advantages provided by CubeSatplatforms, still quite few custom made solutions are needed for completing the design.

Chapter 9
Conclusion
The work in this study considered the feasibility of using CubeSat platform for a small asteroiddespinning mission. It was assumed that the lander is carried to the vicinity of the asteroidinside the mothership.
First, in Chapter 2 a near-Earth asteroid (NEA) was chosen for the mission. The chosenasteroid had to be suitable for both despinning and redirection missions, thus its accessibilityfrom the Earth was taken into account. The asteroid redirection mission was not studied in thiswork.
From the list of all known Arjuna-type asteroids, asteroid 2014 UR was selected as a suit-able candidate. Due to the lack of lightcurve data, the parameters of the asteroid were vague:the range of diameter was between 10.6 m to 21.2 m, the spectral asteroid type was not knownnor whether it was spinning or tumbling. By referring to photometric surveys of small NEAs,it was concluded that asteroid 2014 UR was most likely to be S- or C-type.
Due to the vagueness of asteroid parameters, in Chapter 3 the mission was divided intotwo possible scenarios: best case and worst case. Best case scenario assumed smallest andlightest possible asteroid spinning around one axis at lowest possible angular velocity. For theworst case scenario, the asteroid was assumed to have the largest possible diameter, and highestdensity. The asteroid was tumbling at the highest possible angular velocity.
In order to find the initial requirements for lander design, forces acting on a landed space-craft were estimated. Both best and worst case scenarios were considered. Natural forces actingon the lander included: gravitational, solar radiation, electrostatic and centrifugal forces. Forthe worst case scenario the dominant force was centrifugal. For the best case scenario gravita-tional and centrifugal forces were of a similar magnitude. Tangential force acting on a landerwas asteroid despinning force, when thrusters were utilised. In the worst case 50 N tangen-tial force was acting on the spacecraft when despinning time was 7 h. In the best case, only0.1 N tangential force was acting on the spacecraft when despinning the asteroid in the same

82
timeframe. The results showed the importance of knowing the parameters of the asteroid asprecisely as possible.
Since the gravitational force was estimated to be almost negligible, landing on the asteroidwas only possible in fully controlled (active) descent, as discussed in Chapter 4. Chapter 5considered various anchoring systems for establish strong contact with the asteroid surface.Slow and fast anchoring methods were reviewed, and criteria for desired anchoring techniquewere established. Suitable anchoring systems for the asteroid despinning mission were selectedto be the following: self-opposing drilling, sawing, microspine gripper, tethered spike, andtelescoping spike.
In Chapter 6, multi-criteria decision making (MCDM) technique PROMETHEE was usedfor selecting the most suitable anchoring system according to the criteria. First, all qualitativecriteria were converted into quantitative ones, and all overlapping criteria were put under asingle criterion. The importance of all criteria was found by assigning weights to each. Humanerror was included, and accurate estimation of weights was finalised by solving the least squaresproblem. The PROMETHEE method was chosen for comparing selected anchoring systemsunder all criteria. All anchoring systems were ranked. The microspine gripper performed thebest.
The mission drivers for preliminary spacecraft design were identified in Chapter 7. Themain drivers were: mission data flow, required Delta-V budget and pointing accuracy. It wasconcluded that the lander had to have autonomy for navigating in the vicinity of the asteroidand calculating detumbling procedure, while the mothership was responsible for sending thelanding location. Required velocity change for landing on the asteroid was found by usingClohessy-Wiltshire equations, where the landing procedure was treated as docking. The Delta-V budget for despinning the asteroid was estimated for both best and worst case scenarios.Pointing accuracy was defined as an angle which ensures that the asteroid always stays in thefield of spacecraft view.
Spacecraft subsystems were chosen with regard to the main mission drivers in Chapter 8.The biggest emphasis was placed on AOC (attitude and orbit control) and propulsion subsys-tems. It was estimated that no actuators were needed for attitude control, and the propulsionsystem was utilised for this purpose. Star trackers, sun sensors, IMU (inertial measurementunit), and compact laser altimeter were chosen as sensors for AOC subsystem. The propulsionsubsystem was dominated by the required propellant budget. It was shown that no propul-sion system technologies exist for detumbling the asteroid candidate in the worst case sce-nario. For the best case scenario, chemical propulsion system PM200 by Hyperion was chosen.Transceiver operating on VHF and UHF band and low gain antenna were picked for commu-nications subsystem. An estimate was made for mass and power of C&DH (command and

83
data handling) and thermal subsystems, based on previous deep space missions. The Cube-Sat structure was estimated to be 12U. Body mounted solar panels and electrical propulsionsystem (including batteries and regulators) were selected for power subsystem. The anchoringsubsystem consisted of microspine gripper.
The total mass budget was estimated to be 14 kg, and total power requirement was estimatedto be 63 W for a 12U CubeSat. With some custom made components, the CubeSat design wasshown to be feasible assuming the best case scenario. Asteroid despinning time was 45 min.It is concluded that accurate knowledge of the asteroid characteristics is of great importance.

Bibliography
[1] A. Probst and R. Förstner, “Spacecraft design of a multiple asteroid orbiter with re-docking lander,” Advances in Space Research, 2017. doi: 10.1016/j.asr.2017.07.041.
[2] M. Moltenbrey, Dawn of Small Worlds. Dwarf Planets, Asteroids, Comets. SpringerInternational Publishing, 2016.
[3] K. A. Carroll, H. Spencer, and R. E. Zee, “An asteroid lander/rover for asteroid surfacegravity surveying,” in 30th Annual AIAA/USU Conference on Small Satellites, pp. 1–19,2016.
[4] J. J. Wang, B. P. Franz, and M. Gruntman, “Instrument lander utilizing a cubesat platformfor in situ exploration of asteroids and comets,” 2017. US Patent 15,636,382.
[5] J. Reill, H.-J. Sedlmayr, P. Neugebauer, M. Maier, E. Krämer, and R. Lichtenheldt,“Mascot - asteroid lander with innvoative mobility mechanism,” in ASTRA - 13th ESASymposium on Advanced Space Technologies for Robotics and Automation, May 2015.
[6] K. Zacny, P. Chu, G. Paulsen, M. Hedlund, B. Mellerowicz, S. Indyk, J. Spring,A. Parness, D. Wegel, R. Mueller, and D. Levitt, Asteroids: Anchoring and SampleAcquisition Approaches in Support of Science, Exploration, and In situ ResourceUtilization, pp. 287–343. Berlin, Heidelberg: Springer Berlin Heidelberg, 2013. doi:10.1007/978-3-642-39244-3_12.
[7] J. Zhang, C. Dong, H. Zhang, S. Li, and A. Song, “Modeling and experimental val-idation of sawing based lander anchoring and sampling methods for asteroid explo-ration,” Advances in Space Research, vol. 61, no. 9, pp. 2426 – 2443, 2018. doi:10.1016/j.asr.2018.02.003.
[8] A. Parness, M. Frost, N. Thatte, J. P. King, K. Witkoe, M. Nevarez, M. Garrett, H. Aghaz-arian, and B. Kennedy, “Gravity-independent rock-climbing robot and a sample acquisi-tion tool with microspine grippers,” Journal of Field Robotics, vol. 30, no. 6, pp. 897–915,2013.
[9] A. Parness, M. Frost, N. Thatte, and J. P. King, “Gravity-independent mobility anddrilling on natural rock using microspines,” in 2012 IEEE International Conferenceon Robotics and Automation, pp. 3437–3442, May 2012. doi: 10.1109/ICRA.2012.6224933.
[10] A. D. Steltzner and A. K. Nasif, “Anchoring technology for in situ exploration of smallbodies,” in 2000 IEEE Aerospace Conference. Proceedings (Cat. No.00TH8484), vol. 7,pp. 507–518 vol.7, 2000. doi: 10.1109/AERO.2000.879319.

Bibliography 85
[11] M. Thiel, J. Stöcker, C. Rohe, N. I. Kömle, G. Kargl, O. Hillenmaier, and P. Lell,“The ROSETTA Lander anchoring system,” in 10th European Space Mechanisms andTribology Symposium (R. A. Harris, ed.), vol. 524 of ESA Special Publication, pp. 239–246, Sept. 2003.
[12] C. D. Brown, Elements of spacecraft design. American Institute of Aeronautics andAstronautics, 2002.
[13] D. Vallado and W. McClain, Fundamentals of Astrodynamics and Applications. Collegecustom series, McGraw-Hill, 1997.
[14] C. de la Fuente Marcos and R. de la Fuente Marcos, “Geometric characterization of theArjuna orbital domain,” Astronomische Nachrichten, vol. 336, p. 5, Jan. 2015. doi: 10.1002/asna.201412133.
[15] NASA, “JPL: Small-Body Database Search Engine,” retrieved May 2018. [online] https://ssd.jpl.nasa.gov/sbdb_query.cgi#x.
[16] NASA, “State of the art of small spacecraft technology,” retrieved October 2018. [online]https://sst-soa.arc.nasa.gov.
[17] Enpulsion, “IFM Nano Thruster,” retrieved October 2018. [online] https://www.enpulsion.com/uploads/products/IFM-Nano-Thruster/ENP_-_IFM_Nano_Thruster_-_Product_Overview.pdf.
[18] NanoAvionics, “CubeSat propulsion “EPSS” – green chemical propulsion sys-tem,” retrieved October 2018. [online] https://n-avionics.com/subsystems/cubesat-green-chemical-propulsion-system-epss/.
[19] Bradford ECAPS, “HPGP Thrusters,” retrieved October 2018. [online] http://ecaps.space/products-overview-ecaps.php.
[20] Busek, “Busek green monopropellant thrusters,” retrieved October 2018. [online] http://www.busek.com/technologies__greenmonoprop.htm.
[21] Hyperion Technologies, “PM200,” retrieved October 2018. [online] http://hyperiontechnologies.nl/products/pm200/.
[22] K. Tsiolkovsky, “The exploration of cosmic space by means of reaction motors,” ScientificReview, Moscow and St. Petersburg, vol. 221, p. 222, 1903.
[23] J. Lewis, Asteroid Mining 101: Wealth for the New Space Economy:. Deep Space Indus-tries Incorporated, 2015.
[24] C. Lewicki, P. Diamandis, E. Anderson, C. Voorhees, and F. Mycroft, “Planetary re-sources—the asteroid mining company,” New Space, vol. 1, no. 2, pp. 105–108, 2013.
[25] Planetary Resources, “Arkyd-301,” retrieved October 2018. [online] https://www.planetaryresources.com/missions/arkyd-301/.

Bibliography 86
[26] D. W. Dunham, R. W. Farquhar, J. V. McAdams, M. Holdridge, R. Nelson, K. Whitten-burg, P. Antreasian, S. Chesley, C. Helfrich, W. M. Owen, B. Williams, J. Veverka, andA. Harch, “Implementation of the first asteroid landing,” Icarus, vol. 159, no. 2, pp. 433– 438, 2002. doi: 10.1006/icar.2002.6911.
[27] K. Yoshida, “Achievements in space robotics,” IEEE Robotics Automation Magazine,vol. 16, pp. 20–28, December 2009. doi: 10.1109/MRA.2009.934818.
[28] T. Yoshimitsu, J. Kawaguchi, T. Hashimoto, T. Kubota, M. Uo, H. Morita, and K. Shi-rakawa, “Hayabusa-final autonomous descent and landing based on target marker track-ing,” Acta Astronautica, vol. 65, no. 5, pp. 657 – 665, 2009. doi: 10.1016/j.actaastro.2009.01.074.
[29] T.-M. Ho, V. Baturkin, C. Grimm, J. T. Grundmann, C. Hobbie, E. Ksenik, C. Lange,K. Sasaki, M. Schlotterer, M. Talapina, N. Termtanasombat, E. Wejmo, L. Witte,M. Wrasmann, G. Wübbels, J. Rößler, C. Ziach, R. Findlay, J. Biele, C. Krause,S. Ulamec, M. Lange, O. Mierheim, R. Lichtenheldt, M. Maier, J. Reill, H.-J. Sedlmayr,P. Bousquet, A. Bellion, O. Bompis, C. Cenac-Morthe, M. Deleuze, S. Fredon, E. Jurado,E. Canalias, R. Jaumann, J.-P. Bibring, K. H. Glassmeier, D. Hercik, M. Grott, L. Celotti,F. Cordero, J. Hendrikse, and T. Okada, “Mascot—the mobile asteroid surface scout on-board the hayabusa2 mission,” Space Science Reviews, vol. 208, pp. 339–374, Jul 2017.doi: 10.1007/s11214-016-0251-6.
[30] H. Boehnhardt, J.-P. Bibring, I. Apathy, H. U. Auster, A. Ercoli Finzi, F. Goesmann,G. Klingelhöfer, M. Knapmeyer, W. Kofman, H. Krüger, S. Mottola, W. Schmidt, K. Sei-densticker, T. Spohn, and I. Wright, “The philae lander mission and science overview,”Philosophical Transactions of the Royal Society of London A: Mathematical, Physicaland Engineering Sciences, vol. 375, no. 2097, 2017. doi: 10.1098/rsta.2016.0248.
[31] P. Abell, D. Mazanek, D. Reeves, P. Chodas, M. Gates, L. Johnson, and R. Ticker, “Nasa’sasteroid redirect mission (arm),” 2017.
[32] T. Statler, D. Cotto-Figueroa, K. Sweeney, and D. Riethmiller, “The spin rates of smallnear-earth asteroids,” in EPSC-DPS Joint Meeting 2011, p. 1680, 2011.
[33] J. R. Brophy, L. Friedman, and F. Culick, “Asteroid retrieval feasibility,” in 2012 IEEEAerospace Conference, pp. 1–16, March 2012. doi: 10.1109/AERO.2012.6187031.
[34] H. F. Grip, M. Ono, J. Balaram, J. Cameron, A. Jain, C. Kuo, S. Myint, and M. Quadrelli,“Modeling and simulation of asteroid retrieval using a flexible capture mechanism,” in2014 IEEE Aerospace Conference, pp. 1–14, March 2014.
[35] K. James and R. Hoyt, “Nanosatellite architecture for tethered de-spin of massive aster-oids,” in 29th Annual AIAA/USU Conference on Small Satellites, pp. 1–12, 2016.
[36] J. Kang and Z. H. Zhu, “De-spin of massive rotating space object by tethered space tug,”Journal of Guidance, Control, and Dynamics, pp. 1–7, 2018.
[37] M. C. F. Bazzocchi and M. R. Emami, “Asteroid redirection mission evaluation usingmultiple landers,” The Journal of the Astronautical Sciences, Jan 2018. doi: 10.1007/s40295-017-0125-5.

Bibliography 87
[38] R. Hevner, W. Holemans, J. Puig-Suari, and R. Twiggs, “An advanced standard for cube-sats,” in 25th Annual AIAA/USU Conference on Small Satellites, pp. 1–12, 2011.
[39] C. W. Hergenrother, R. Malhotra, B. Rizk, J. N. Kidd, C. Drouet d’Aubigny, S. R. Ches-ley, and D. S. Lauretta, “A Search for Earth Trojan Asteroids with the OSIRIS-RExSpacecraft,” in Lunar and Planetary Science Conference, vol. 48 of Lunar and PlanetaryInst. Technical Report, p. 2892, Mar. 2017.
[40] M. Ockert-Bell, B. Clark, M. Shepard, R. Isaacs, E. Cloutis, S. Fornasier, and S. Bus,“The composition of m-type asteroids: Synthesis of spectroscopic and radar observa-tions,” Icarus, vol. 210, no. 2, pp. 674 – 692, 2010. doi: 10.1016/j.icarus.2010.08.002.
[41] M. Galiazzo, E. Silber, and D. Bancelin, “V-type near-earth asteroids: Dynamics, closeencounters and impacts with terrestrial planets,” Astronomische Nachrichten, vol. 338,no. 4, pp. 375–384, 2017.
[42] K. Graves, D. Minton, and M. Hirabayashi, “The formation of q-type asteroids from yorpspin-up and fission,” in Lunar and Planetary Science Conference, vol. 47, p. 2187, 2016.
[43] NASA, “JPL: CNEOS - Centre for Near-Earth Object Studies,” retrieved May 2018. [on-line] https://cneos.jpl.nasa.gov/stats/.
[44] B. D. Warner, A. W. Harris, and P. Pravec, “The asteroid lightcurve database,” Icarus,vol. 202, no. 1, pp. 134 – 146, 2009. doi: 10.1016/j.icarus.2009.02.003.
[45] C. A. Thomas, D. E. Trilling, J. P. Emery, M. Mueller, J. L. Hora, L. A. M. Benner,B. Bhattacharya, W. F. Bottke, S. Chesley, M. Delbó, G. Fazio, A. W. Harris, A. Mainzer,M. Mommert, A. Morbidelli, B. Penprase, H. A. Smith, T. B. Spahr, and J. A. Stans-berry, “Exploreneos. v. average albedo by taxonomic complex in the near-earth asteroidpopulation,” The Astronomical Journal, vol. 142, no. 3, p. 85, 2011.
[46] A. W. Harris, “Tumbling asteroids,” Icarus, vol. 107, no. 1, pp. 209 – 211, 1994. doi:10.1006/icar.1994.1017.
[47] B. D. Warner, “Near-Earth Asteroid Lightcurve Analysis at CS3-Palmer Divide Station:2014 October-December,” Minor Planet Bulletin, vol. 42, pp. 115–127, Apr. 2015.
[48] C.-H. Lin, W.-H. Ip, Z.-Y. Lin, Y.-C. Cheng, H.-W. Lin, and C.-K. Chang, “Photometricsurvey and taxonomic identifications of 92 near-earth asteroids,” Planetary and SpaceScience, vol. 152, pp. 116 – 135, 2018. doi: 10.1016/j.pss.2017.12.019.
[49] M. Belton, M. Belton, T. Morgan, N. Samarasinha, and D. Yeomans, Mitigation ofHazardous Comets and Asteroids. Cambridge University Press, 2004.
[50] B. Carry, E. Solano, S. Eggl, and F. E. DeMeo, “Spectral properties of near-earth andmars-crossing asteroids using sloan photometry,” Icarus, vol. 268, pp. 340–354, 2016.
[51] D. Perna, M. A. Barucci, M. Fulchignoni, M. Popescu, I. Belskaya, S. Fornasier,A. Doressoundiram, C. Lantz, and F. Merlin, “A spectroscopic survey of the smallnear-earth asteroid population: peculiar taxonomic distribution and phase reddening,”Planetary and Space Science, 2018.

Bibliography 88
[52] D. T. Britt, D. Yeomans, K. Housen, and G. Consolmagno, “Asteroid density, porosity,and structure,” 2003.
[53] D. R. Davis, E. V. Ryan, and P. Farinella, “Asteroid collisional evolution: Results fromcurrent scaling algorithms,” Planetary and Space Science, vol. 42, no. 8, pp. 599–610,1994.
[54] J. Petrovic, “Review mechanical properties of meteorites and their constituents,” Journalof Materials Science, vol. 36, no. 7, pp. 1579–1583, 2001.
[55] R. J. Whiteley, D. J. Tholen, and C. W. Hergenrother, “Lightcurve analysis of four newmonolithic fast-rotating asteroids,” Icarus, vol. 157, no. 1, pp. 139–154, 2002.
[56] D. J. Scheeres, C. M. Hartzell, P. Sanchez, and M. Swift, “Scaling forces to asteroidsurfaces: The role of cohesion,” Icarus, vol. 210, no. 2, pp. 968–984, 2010.
[57] N. I. Kömle, A. J. Ball, G. Kargl, J. Stöcker, M. Thiel, H. S. Jolly, M. Dziruni, and J. C.Zarnecki, “Using the anchoring device of a comet lander to determine surface mechanicalproperties,” Planetary and Space Science, vol. 45, no. 12, pp. 1515 – 1538, 1997. doi:10.1016/S0032-0633(97)00140-2.
[58] A. Poghosyan and A. Golkar, “Cubesat evolution: Analyzing cubesat capabilities for con-ducting science missions,” Progress in Aerospace Sciences, vol. 88, pp. 59–83, 2017.
[59] G. Krasinsky, E. Pitjeva, M. Vasilyev, and E. Yagudina, “Hidden mass in the asteroidbelt,” Icarus, vol. 158, no. 1, pp. 98 – 105, 2002.
[60] P. Lee, “Dust levitation on asteroids,” Icarus, vol. 124, no. 1, pp. 181–194, 1996.
[61] D. Mendis, J. R. Hill, H. L. Houpis, and E. Whipple, “On the electrostatic charging ofthe cometary nucleus,” The Astrophysical Journal, vol. 249, pp. 787–797, 1981.
[62] C. M. Hartzell, The dynamics of near-surface dust on airless bodies. PhD thesis, Univer-sity of Colorado at Boulder, 2012.
[63] R. Ridenoure, J. Cardin, and C. Day, “Small spinning landers for solar system explorationmissions,” in 28th Annual AIAA/USU Conference on Small Satellites, pp. 1–11, 2014.
[64] R. Ridenoure, “Cubesat-class spinning landers for solar system exploration mis-sions.” Presentation, retrieved April 2014. [online] http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2014/Ridenoure_Spinning_Landers.pdf.
[65] S. Ulamec, J. Biele, P.-W. Bousquet, P. Gaudon, K. Geurts, T.-M. Ho, C. Krause,C. Lange, R. Willnecker, and L. Witte, “Landing on small bodies: From the rosettalander to mascot and beyond,” Acta Astronautica, vol. 93, pp. 460 – 466, 2014. doi:10.1016/j.actaastro.2013.02.007.
[66] Z. Zhao, J. Zhao, and H. Liu, “Study on the landing mechanism employed in asteroidexploration,” in 2012 IEEE International Conference on Mechatronics and Automation,pp. 1032–1037, Aug 2012. doi: 10.1109/ICMA.2012.6283392.

Bibliography 89
[67] J. T. Grundmann, W. Bauer, J. Biele, R. Boden, M. Ceriotti, F. Cordero, B. Dachwald,E. Dumont, C. D. Grimm, D. Her�ık, T.-M. Ho, R. Jahnke, A. D. Koch, A. Koncz,C. Krause, C. Lange, R. Lichtenheldt, V. Maiwald, T. Mikschl, E. Mikulz, S. Montene-gro, I. Pelivan, A. Peloni, D. Quantius, S. Reershemius, T. Renger, J. Riemann, M. Ru�er,K. Sasaki, N. Schmitz, W. Seboldt, P. Seefeldt, P. Spietz, T. Spröwitz, M. Sznajder, S. Tar-divel, N. Tóth, E. Wejmo, F. Wol�, and C. Ziach, “Capabilities of gossamer-1 derivedsmall spacecraft solar sails carrying mascot-derived nanolanders for in-situ surveying ofneas,” Acta Astronautica, 2018. doi: 10.1016/j.actaastro.2018.03.019.
[68] K. Zacny, Y. Bar-Cohen, M. Brennan, G. Briggs, G. Cooper, K. Davis, B. Dolgin,D. Glaser, B. Glass, S. Gorevan, J. Guerrero, C. McKay, G. Paulsen, S. Stanley, andC. Stoker, “Drilling systems for extraterrestrial subsurface exploration,” Astrobiology,vol. 8, no. 3, pp. 665–706, 2008. doi: 10.1089/ast.2007.0179.
[69] J. Zhang, A. Song, and W. Lu, “Anchoring and sampling processes analysis of a land-ing robot in asteroid exploration,” in Robotics and Biomimetics (ROBIO), 2016 IEEEInternational Conference on, pp. 185–190, IEEE, 2016.
[70] A. Parness, A. Willig, A. Berg, M. Shekels, V. Arutyunov, C. Dandino, and B. Kennedy,“A microspine tool: Grabbing and anchoring to boulders on the asteroid redirect mission,”in 2017 IEEE Aerospace Conference, pp. 1–10, March 2017.
[71] H. Liu, Z. Zhao, and J. Zhao, “Preliminary anchoring technology for landing on the as-teroid,” in 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO),pp. 2392–2396, Dec 2013. doi: 10.1109/ROBIO.2013.6739828.
[72] M. Majumder, “Multi criteria decision making,” in Impact of urbanization on watershortage in face of climatic aberrations, pp. 35–47, Springer, 2015.
[73] A. Mehrparvar, D. Pignatelli, J. Carnahan, R. Munakat, W. Lan, A. Toorian, A. Hut-putanasin, and S. Lee, “Cubesat design specification rev. 13,” The CubeSat Program, CalPoly San Luis Obispo, US, vol. 1, p. 2, 2014.
[74] E. Triantaphyllou, “Multi-criteria decision making methods,” in Multi-criteria decisionmaking methods: A comparative study, pp. 5–21, Springer, 2000.
[75] S. Greco, J. Figueira, and M. Ehrgott, Multiple criteria decision analysis. Springer, 2016.
[76] V. Balali, B. Zahraie, and A. Roozbahani, “Integration of electre iii and promethee iidecision-making methods with an interval approach: Application in selection of appro-priate structural systems,” Journal of Computing in Civil Engineering, vol. 28, no. 2,pp. 297–314, 2012.
[77] E. D. P. J. Wertz, J.R., Space Mission Engineering: The New SMAD. Space TechnologyLibrary, Microcosm Press, 2011.
[78] M. M. Micci, Micropropulsion for small spacecraft, vol. 187. Aiaa, 2000.
[79] P. Aerospace.
[80] CubeSatShop, “sun sensor nfss-411.”

Bibliography 90
[81] Sensonor, “Sensonor - STIM300,” retrieved October 2018. [online] https://www.sensonor.com/products/inertial-measurement-units/stim300/.
[82] J. R. Bruzzi, K. Strohbehn, B. G. Boone, S. Kerem, R. S. Layman, and M. W. No-ble, “A compact laser altimeter for spacecraft landing applications,” Johns Hopkins APLtechnical digest, vol. 30, no. 4, pp. 331–345, 2012.
[83] G. P. Sutton and O. Biblarz, Rocket propulsion elements. John Wiley & Sons, 2016.
[84] M. Armano, H. Audley, G. Auger, J. Baird, P. Binetruy, M. Born, D. Bortoluzzi,N. Brandt, A. Bursi, M. Caleno, et al., “A strategy to characterize the lisa-pathfindercold gas thruster system,” in Journal of Physics: Conference Series, vol. 610, p. 012026,IOP Publishing, 2015.
[85] CubeSatShop, “uhf downlink/vhf uplink full duplex transceiver.”
[86] ISISpace, “Cubesat communication bundle,” retrieved October 2018. [online] https://www.isispace.nl/product/cubesat-communication-bundle/.
[87] CubeSatShop, “Cubesat solar panel DHV-CS-10, day = 22, month = retrievedOctober, year = 2018, note = [online] https://www.cubesatshop.com/product/cubesat-solar-panels/, url = https://www.cubesatshop.com/product/cubesat-solar-panels/.”
[88] NanoAvionics, “Electrical power system “EPS”,” retrieved October 2018. [online] https://n-avionics.com/subsystems/cubesat-electrical-power-system-eps/.
[89] NASA, “Technology readiness level,” retrieved July 2018. [online] https://www.nasa.gov/directorates/heo/scan/engineering/technology/txt_accordion1.html.

Appendix A
Technology Readiness Levels
The maturity of technology is typically assessed with technology readiness level (TRL) mea-surement system. The most common system is the one provided by NASA in the table below[89].
Table A.1 Technology readiness levels according to NASA.
TRL Description
1 Basic principles observed and reported.
2 Technology concept and/or application formulated.
3 Analytical and experimental critical function and/or characteristic proof-of-concept.
4 Component and/or breadboard validation in laboratory environment.
5 Component and/or breadboard validation in relevant environment.
6 System/sub-system model or prototype demonstration in a relevant environment(ground or space).
7 System prototype demonstration in space environment.
8 Actual system completed and “flight qualified” through test and demonstration(ground or space).
9 Actual system “flight proven” through successful mission operations.

Appendix B
Multi-Criteria Decision Making
B.1 Pairwise Comparison of Anchoring Criteria
The comparison of each criteria pair is made by asking a question: “Is it equally important to
have both of the following?”. The description of the scores is provided by Table 6.4. Explana-tion of each pairwise comparison is provided in the table below.
Table B.1 Verbal and numerical pairwise comparison of each criterion.
Pair Explanation & Result Score
w12Low MVP budget & Low
preload requirement
The importance of both criteria is almost
identical. Low preload results in low mass andvolume budgets, since less fuel is required forthrusting during anchoring process.
0.1
w13Low MVP budget & High
TRL
The importance of both criteria is almost very
similar. One of the main goals of this study isto minimise mass and volume for a CubeSatmission. Therefore, low MVP budgets aregiven a slightly higher priority than high TRL.
0.3
w14Low MVP budget &
Re-anchoring capability
The importance of both criteria is almost very
similar. Re-anchoring capability is slightlymore critical to the mission success. However,since low MVP budget is one of the mainobjectives of the study, it is also of greatimportance.
0.3

B.1 Pairwise Comparison of Anchoring Criteria 93
Pair Explanation & Result Score
w15
Low MVP budget & Abilityto anchor at wide range of
angles
The importance of both criteria is similar.Ability to anchor at wide range of angles isseen as more critical to the mission successthan low MVP budget.
0.5
w16
Low MVP budget &Applicability to di�erent
surfaces
The importance of both criteria is almost
dissimilar. Applicability to possible surfaces isseen as more important than low MVP budget,since this is critical to mission success.
0.6
w17Low MVP budget & Short
anchoring time
The importance of both criteria is almost very
similar. Even though shorter anchoring timesincrease the possibility of mission success, lowMVP budget is seen as slightly more important,since it is one of the objectives of this study.
0.3
w18Low MVP budget &
Su�cient anchoring strength
The importance of both criteria is almost
dissimilar. Su�cient anchoring strength ismore important than low MVP budget, since itis one of the most critical criteria guaranteeingsuccess of the mission.
0.6
w23Low preload requirement &
High TRL
The importance of both criteria is very similar.However, because high preload requirementwould quite significantly increase missioncomplexity, and would also contribute tohigher mass, it is chosen as slightly moreimportant than high TLR requirement.
0.2
w24Low preload requirement &
Re-anchoring capability
The importance of both criteria is almost very
similar. Re-anchoring capability is slightlymore critical to the mission success. However,since low MVP budget is one of the mainobjectives of the study, it is also of greatimportance.
0.3

B.1 Pairwise Comparison of Anchoring Criteria 94
Pair Explanation & Result Score
w25
Low preload requirement &Ability to anchor at wide
range of angles
The importance of both criteria is similar.Even though low preload requirementdecreases complexity of the mission, ability toanchor at wide range of angles is seen as morecritical to the mission success.
0.5
w26
Low preload requirement &Applicability to di�erent
surfaces
The importance of both criteria is almost very
dissimilar. Applicability to anchor to di�erenttypes of surfaces is seen as much more criticalto mission success, than low preloadrequirement.
0.7
w27Low preload requirement &
Short anchoring time
The importance of both criteria is very similar.Even though both short anchoring time and lowpreload requirement decrease complexity of themission, the later is seen as slightly morecritical since it could impose more significantchallenges for propulsion system choice inorder to be able to provide enough thrust.
0.2
w28Low preload requirement &Su�cient anchoring strength
The importance of both criteria is almost very
dissimilar. Su�cient anchoring strength isseen as one of the most critical criteria for themission success, therefore it is considered to bemuch more important than low preloadrequirement.
0.7
w34High TRL & Re-anchoring
capability
The importance of both criteria is almost
similar. Since capability to re-anchor is morecritical to mission success, this criteria isconsidered to be more important.
0.4
w35
High TRL & Ability toanchor at wide range of
angles
The importance of both criteria is almost
dissimilar. Ability to anchor at wide rangeangles is seen to be more critical to missionsuccess, and thus much more important.
0.6

B.1 Pairwise Comparison of Anchoring Criteria 95
Pair Explanation & Result Score
w36High TRL & Applicability to
di�erent surfaces
The importance of both criteria is almost very
dissimilar. Applicability to anchor to di�erentpossible surfaces is seen as much more criticalto mission success, and thus much moreimportant.
0.7
w37High TRL & Short anchoring
time
The importance of both criteria is almost
identical. Short anchoring time is considered tobe just slightly more important than high TRL,since it would reduce complexity of the mission
0.1
w38High TRL & Su�cient
anchoring strength
The importance of both criteria is very
dissimilar. Su�cient anchoring strength isdefinitely much more important for the missionto be viable.
0.8
w45
Re-anchoring capability &Ability to anchor at wide
range of angles
The importance of both criteria is very similar.Ability to anchor at wide range of angles isseen as slightly more critical to missionsuccess than re-anchoring capability.
0.2
w46
Re-anchoring capability &Applicability to di�erent
surfaces
The importance of both criteria is almost
similar. Applicability to anchor to di�erentpossible asteroid surfaces is seen as morecritical to mission success than re-anchoringcapability.
0.4
w47Re-anchoring capability &
Short anchoring time
The importance of both criteria is almost
similar. Re-anchoring capability is moreimportant for the mission success than shortanchoring time.
0.4
w48Re-anchoring capability &
Su�cient anchoring strength
The importance of both criteria is similar.Ability to have su�cient anchoring strength isof higher importance to mission success thanre-anchoring capability.
0.5

B.1 Pairwise Comparison of Anchoring Criteria 96
Pair Explanation & Result Score
w56
Ability to anchor at widerange of angles &
Applicability to di�erentsurfaces
The importance of both criteria is very similar.Applicability of the anchoring system todi�erent possible asteroid surfaces is seen asslightly more important than ability to anchorat wide range of angles.
0.2
w57
Ability to anchor at widerange of angles & Short
anchoring time
The importance of both criteria is similar.Ability to anchor at wide range of angles ismore important for mission success than shortanchoring time.
0.5
w58
Ability to anchor at widerange of angles & Su�cient
anchoring strength
The importance of both criteria is almost
similar. Having su�cient anchoring strength ismore important for mission success than abilityto anchor at wide range of angles.
0.4
w67
Applicability to di�erentsurfaces & Short anchoring
time
The importance of both criteria is very
dissimilar. Ability to anchor to all possibleasteroid surfaces is seen as much moreimportant for the mission success than shortanchoring time.
0.8
w68
Applicability to di�erentsurface & Su�cientanchoring strength
The importance of both criteria is very similar.However, ability to have su�cient anchoringstrength is seen as slightly more important forthe mission success.
0.2
w78Short anchoring time &
Su�cient anchoring strength
The importance of both criteria is very
dissimilar. Ability to provide su�cientanchoring strength is much more critical andimportant for the mission success than shortanchoring time.
0.8

B.2 MATLAB Script for Pairwise Di�erence Comparison 97
B.2 MATLAB Script for Pairwise Di�erence Comparison
This MATLAB script analyses user defined matrix CDP (Table 6.6), finds inconsistency errorfactors, and calculates the real matrix RDP (Table 6.7), as described in Section 6.3.
1 %% Agne P a s k e v i c i u t e , agnep@kth . se , KTH Royal I n s t i t u t e o fTechnology , Sweden . 2018
2
3 c l e a r a l l4 c l o s e a l l5
6 %% I n p u t s7
8 i n = [0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 6 0 . 7 0 . 89 0 . 1 0 0 . 2 0 . 3 0 . 4 0 . 5 0 . 8 0 . 8
10 0 . 2 0 . 2 0 0 . 1 0 . 3 0 . 5 0 . 7 0 . 711 0 . 3 0 . 3 0 . 1 0 0 . 3 0 . 5 0 . 6 0 . 612 0 . 4 0 . 4 0 . 3 0 . 3 0 0 . 2 0 . 4 0 . 513 0 . 6 0 . 5 0 . 5 0 . 5 0 . 2 0 0 . 2 0 . 414 0 . 7 0 . 8 0 . 7 0 . 6 0 . 4 0 . 2 0 0 . 215 0 . 8 0 . 8 0 . 7 0 . 6 0 . 5 0 . 4 0 . 2 0 ] ; %
CDP m a t r i x . Decided by u s e r16
17 n = s i z e ( in , 1 ) ; % number o f c r i t e r i a ( o r e n t i t i e s o f i n t e r e s t )18 X = sym ( ’ x%d%d ’ , [ n n ] ) ; % empty m a t r i x o f e r r o r f a c t o r s f o r
each compar i son19
20 %% Q u a d r a t i c programming21
22 k = 1 ;23 j = 2 ;24 i = 3 ;25 c o u n t e r = 1 ;26 c oun t = 1 ;27
28 % g e n e r a t i n g e q u a t i o n s f o r min imiz ing t h e e r r o r29 wh i l e ( i ~= ( n +1) )

B.2 MATLAB Script for Pairwise Di�erence Comparison 98
30 eqn ( coun t e r , : ) = i n ( j , i ) �X( j , i ) + i n ( k , j ) �X( k , j ) � i n ( k , i )�X( k , i ) == 0 ;
31
32 X_v ( count , 1 ) = X( j , i ) ; % e r r o r f a c t o r33 X_v ( count , 2 ) = i n ( j , i ) ; % c o r r e s p o n d i n g CDP va l u e34 X_v ( coun t +1 ,1 ) = X( k , j ) ;35 X_v ( coun t +1 ,2 ) = i n ( k , j ) ;36 X_v ( coun t +2 ,1 ) = X( k , i ) ;37 X_v ( coun t +2 ,2 ) = i n ( k , i ) ;38 c oun t = coun t +3 ;39
40 i f i == ( j +1) && j == ( k +1)41 k = 1 ;42 j = 2 ;43 i = i +1 ;44 e l s e i f ( i�j ) ~= 1 && j == ( k +1)45 k = 1 ;46 j = j +1 ;47 e l s e i f ( j�k ) ~= 148 k = k +1;49 end50
51 c o u n t e r = c o u n t e r + 1 ;52 end53
54 %% C r e a t i n g sys tem of l i n e a r e q u a t i o n s55
56 [A, z e r o s ] = e q u a t i o n s T o M a t r i x ( eqn ) ; % A i s m a t r i x wi thc o e f f i c i e n t s from above g e n e r a t i n g e q u a t i o n s e x p r e s s i o n s
57 A_t = A. ’ ;58
59 % r e a r r a n g i n g t h e v e c t o r60 [ ~ , i du ] = un ique ( X_v ( : , 1 ) ) ;61 X_v = X_v ( idu , : ) ;62
63 % g e n e r a t i n g a v e c t o r o f a l l ones

B.2 MATLAB Script for Pairwise Di�erence Comparison 99
64 m = s i z e ( X_v , 1 ) ;65 ones = ones ( 1 ,m, ’ u i n t 3 2 ’ ) . ’ ;66
67 % g e n e r a t i n g a v e c t o r o f Lag r ang i an m u l t i p l i e r s68 z = s i z e (A, 1 ) ;69 lambda_s = sym ( ’ lambda%d ’ , [ z 1 ] ) ;70 lambda_s ( z , 1 ) = 0 ; % a r b i t r a r y v a l u e71
72
73 %% So lv i ng t h e l i n e a r e q u a t i o n s74
75 eqn2 = [ X_v ( : , 1 ) � ( A_t � lambda_s ) == ones ,76 A � X_v ( : , 1 ) == z e r o s ] ;77 [ X_s , number ] = e q u a t i o n s T o M a t r i x ( eqn2 ) ; % X_s i s m a t r i x o f
e r r o r f a c t o r s c o e f f i c i e n t s78 s o l v i n g = l i n s o l v e ( X_s , number ) ;79 lambda_x = doub le ( s o l v i n g ) ;80
81 r = s i z e ( lambda_s ) ;82 e r r o r = lambda_x ( r : end ) ; % S e p a r a t i n g v e c t o r o f on ly e r r o r
f a c t o r s83 f i n a l = doub l e ( e r r o r . � X_v ( : , 2 ) ) ; % S e p a r a t i n g e r r o r o f on ly
c o r r e c t e d CDP e n t r i e s84 s i z e f i n a l = l e n g t h ( f i n a l ) ;85
86 % P r i n t i n g e r r o r f a c t o r s f o r each CDP en t r y , t o g e t h e r w i thc o r r e c t e d a c t u a l v a l u e s
87 f p r i n t f ( ’ C e l l E r r o r Weight \ n ’ )88 f o r i = 1 : l e n g t h ( f i n a l )89 f p r i n t f ( ’%s %f %f \ n ’ , X_v ( i , 1 ) , e r r o r ( i ) , f i n a l ( i ) ) ;90 end91
92
93 %% RDP m a t r i x94
95 a r r a y = X_v ( : , 1 ) ;

B.3 PROMETHEE Preference Functions and Parameters 100
96 s t r i n g = cha r ( a r r a y ) ;97 c e l l s = s t r 2 d o u b l e ( r egexp ( s t r i n g , ’ \ d� ’ , ’ Match ’ ) ) ;98
99 i = 1 ;100 s i z e = s i z e ( c e l l s ) ;101 W = sym ( ’w%d ’ , [ n 1 ] ) ;102 f o r c = i : s i z e ( 1 , 2 )103 no = c e l l s ( c ) ;104 n o _ s t r = s t r 2 d o u b l e ( r egexp ( num2s t r ( no ) , ’ \ d ’ , ’ match ’ ) ) ;105
106 a = n o _ s t r ( 1 ) ;107 b = n o _ s t r ( 2 ) ;108
109 % G e n e r a t i n g RDP m a t r i x110 m a t r i x ( a , b ) = f i n a l ( c ) ;111 m a t r i x ( b , a ) = f i n a l ( c ) ;112 eqn3 ( c , 1 ) = [ abs (W( a ) � W( b ) ) == f i n a l ( c ) ] ; % non� l i n e a r
e q u a t i o n s f o r f i n d i n g we i gh t s f o r each c r i t e r i a113
114 c = c +1;115 end
B.3 PROMETHEE Preference Functions and Parameters
PROMETHEE functions used for the analysis are listed in Table B.2. The functions are usedas described by Greco, et al. [75], however some definitions are changed to suit better for thepurpose of this study. In total, Greco et al. suggests 6 di�erent preference functions to choosefrom, however only the three functions depicted below are used.
Table B.3 is provided below, including descriptions of how function is chosen and param-eters are calculated for each criterion.

B.3 PROMETHEE Preference Functions and Parameters 101
Table B.2 Types of generalised criteria.
Generalised criterion Definition Parameters to fix
Usual Criterion
P(d) =
(0 d 01 d > 0
–
U-shape Criterion
P(d) =
(0 d < q1 d � q
q
V-shape Criterion
P(d)=
8><
>:
0 d 0dp 0 < d < p1 � p
p

B.3 PROMETHEE Preference Functions and Parameters 102
Table B.3 Function choice for each criterion.
Criterion Explanation Criterion
g1 MVPFrom the point system described in Table 6.2,The maximum is 14, and minimum is 2. Thepreference is given linearly.
V-shapep = 12
g2 Preload Required
The maximum is 10 N, and minimum is 0.Linear increase of preload also increases thecomplexity of the spacecraft linearly (as fuelconsumption increases linearly). Thus, thepreference is given as a linear function.
V-shapep = 10
g3 TRLThe highest TRL is 9, and lowest is 1. It is seenthat it takes equal amount of time to reach eachlevel, therefore the function is linear.
V-shapep = 8
g4 Re-anchoring The only values possible are 1 or 0. Thus theonly possible di�erences are �1, 0, 1.
V-shapep = 1
g5Anchoring at WideRange of Angles
Maximum value is 3, minimum value is 0.Linear preference applies.
V-shapep = 3
g6Applicability to
Di�erent Surfaces
Maximum value is 1, minimum value is 0.Since the expectation of the chosen asteroid tohave rocky surface is very high, it is consideredto be equally good whether the system cananchor on rocks, or both rocks andconsolidated soil.
U-shapeq = 0.1
g7 Anchoring Time
The maximum anchoring time is 3 minutes,minimum time is 0. As anchoring timeincreases linearly, the required extra propellantmass is also expected to increase linearly.Therefore, preference for anchoring timedi�erence is seen to change linearly.
V-shapep = 3
g8Su�cient Anchoring
Strength
It matters only whether the system can reachsu�cient anchoring strength or not. Thereforethe preference given is either 0 or 1.
Usual

Appendix C
Clohessy-Wiltshire Equations
C.1 Coordinate System
Satellite coordinate System, RSW , applies to analysing relative motion of spacecraft [13]. Suchsystem moves with the satellite. The example, depicted in Figure C.1 shows motion in Earth’sorbit: R-axis points from the Earth’s centre to the orbiting body, as it moves along the orbit;
Figure C.1 Coordinate-System Geometry for Relative Motion [13].

C.2 Equations of Motion 104
S-axis points in the direction of orbiting body’s velocity vector; the W -axis is fixed to thedirection normal to the orbital plane. When the orbit is perfectly circular, xyz axes are alignedto the RSW axes, since S can only be aligned with y axis (velocity vector) in circular orbits. Incase of spacecraft docking to asteroid mission, the orbit is around the Sun.
C.2 Equations of Motion
Next, the derivation procedure of the Clohessy-Wiltshire equations is summarised, and appliedassumptions are explained. Exact derivation can be found D.A. Vallado “Fundamentals ofAstrodynamics and Applications”, Section 5.8 [13].
The derived Clohessy-Wiltshire equations for near-circular orbits around a large celestialbody are: 8
>><
>>:
fx = x�2w y�3w2x,
fy = y+2w x,
fz = z+w2z,
(C.1)
where f represents other forces (such as thrusting, solar radiation pressure, etc.). The termsof the right hand side of the first ( fx) equation – from left to right – are total, Coriolis andcentripetal acceleration. Finally, w is angular rate of the target around the body which it isorbiting.
In order to solve the Clohessy-Wiltshire equations, Eq. (C.1), external forces ( f ) are as-sumed to be 0. This assumption is only viable, if the thrusting is impulsive, and does not holdfor continuous low thrust to achieve rendezvous. The solution can be derived with Laplacetransformations [13]. The derived position and velocity equations of the interceptor with re-spect to target at time t are:
8>>>>>>>>>>>>>><
>>>>>>>>>>>>>>:
x(t) =x0
wsinwt �
✓3x0 +
2y0
w
◆coswt +
✓4x0 +
2y0
w
◆,
y(t) =✓
6x0 +4y0
w
◆sinwt +
2x0
wcoswt � (6wx0 +3yo) t +
✓y0 �
2x0
w
◆,
z(t) = z0 coswt +z0
wsinwt,
x(t) = x0 coswt +(3wx0 +2y0)sinwt,
y(t) = (6wx0 +4y0)coswt �2x0 sinwt � (6wx0 +3y0) ,
z(t) = z0w sinwt + z0,coswt
(C.2)

C.2 Equations of Motion 105
where the terms sin and cos indicate some type of oscillatory motion, and subscript 0 indicatesinitial position and velocity of the interceptor.
Writing the first three equations in Eq. (C.2) equal to zero will mean that the intercep-tor has docket with the target. Rearranging the equations in order to express initial velocity(x0, y0, z0), relative to the target, essentially provides relations needed to estimate the requiredvelocity change in order to rendezvous interceptor with the target. After some manipulation,the expressions to calculate the initial velocity of the interceptor with respect to the target arethe following:
8>>>>><
>>>>>:
y0 =(6x0 (wt � sinwt)� y0)w sinwt �2wx0 (4�3coswt)(1� coswt)
(4sinwt �3wt)sinwt +4(1� coswt)2 ,
x0 =�wx0 (4�3coswt)+2(1� coswt) y0
sinwt,
z0 =�z0w cotwt.
(C.3)
All equations presented here were derived under the following assumptions: (1) both satel-lites are within few kilometres of each other; (2) the expression for the position of the inter-ceptor is found by using binomial expansions, and assuming first order relations; (3) since thesatellites are so close, product of relative-range vector and dot product of target and relativevector were negligible; (4) the target is in the circular orbit; (5) no external forces are actingon the interceptor, thrusting is impulsive.
According to all the assumptions mentioned, the Equation (C.3) is considered as suitable forcalculating the initial velocity of the lander spacecraft at the time of release from mothership,with respect to the small asteroid 2014 UR, orbiting the Sun in circular orbit.

Appendix D
Preliminary Design & Subsystems
D.1 Moment Arm & Moment of Inertia
Moment of inertia about rotational axis for a cuboid is calculated as follows:
I =1
12msc(a2 +b2), (D.1)
where msc is mass of the spacecraft, a and b are width and depth. Mass of 3U and 6U space-craft is 4 kg and 8 kg respectively, while mass of 12U and 27U spacecraft is 24 kg and 54 kgrespectively. Size of 1U is 10⇥10⇥10 cm3.
The list of 4 di�erent spacecraft configurations rotating around an axis when two thrustersare fired simultaneously as denoted in the schemes, is given in the table below.
Table D.1 Moment arm and moment of inertia for each CubeSat configuration rotating aroundan axis by firing two thrusters, as denoted in the schemes.
CubeSat Configuration Moment arm, m Moment of inertia, kg m2
3U l = 0.15 I = 0.033

D.1 Moment Arm & Moment of Inertia 107
CubeSat Configuration Moment arm, m Moment of inertia, kg m2
3U l = 0.05 I = 0.0067
6U l = 0.15 I = 0.087
6U l = 0.1 I = 0.033
6U l = 0.15 I = 0.066
12U l = 0.15 I = 0.26

D.1 Moment Arm & Moment of Inertia 108
CubeSat Configuration Moment arm, m Moment of inertia, kg m2
12U l = 0.1 I = 0.16
27U l = 0.15 I = 0.81

www.kth.se