
Artificial Neural Network Based Curve Prediction Documentation
PREDICTION USING ARTIFICIAL NEURAL NETWORKS
Rajasekhar NannapaneniSenior Advisor Solutions ArchitectDell [email protected]
Knowledge Sharing Article © 2017 Dell Inc. or its subsidiaries.

2018 Dell EMC Proven Professional Knowledge Sharing 2
Table of Contents
List of Figures ....................................................................................................................................... 3
List of Abbreviations ............................................................................................................................ 3
Abstract ................................................................................................................................................ 4
A1.1 Cognitive capabilities of ANN’s:................................................................................................... 5
A1.2 Assumptions of neural networks: ................................................................................................ 5
A1.3 ANN’s are successful in delivering human like tools: .................................................................. 6
A1.4 ANN’s Outlook: ............................................................................................................................ 7
B 1.1 Mackey-glass chaotic time series prediction: ............................................................................. 7
C1.1 Architecture of artificial neural network: .................................................................................... 8
C1.2 The training algorithm for the feedforward MLP: ....................................................................... 9
C1.2.1 Forward Phase: ....................................................................................................................... 10
C1.2.2 Reverse Phase: ........................................................................................................................ 12
C1.2.3 Neural network Weight Updates: ........................................................................................... 12
D1.1 Results of time series prediction: .............................................................................................. 13
D1.2 Conclusion: ................................................................................................................................ 14
References ......................................................................................................................................... 15
Appendix ............................................................................................................................................ 16
Appendix – MATLAB code for Mackey-Glass chaotic time series ...................................................... 16

2018 Dell EMC Proven Professional Knowledge Sharing 3
List of Figures Figure No. Title of the figure Pg.No.
Figure 1 Feed forward multi-layer perceptron neural network architecture 8
Figure 2 Plot of Mackey glass time series prediction in MATLAB 14
Figure 3 Plot of mean square error during training process 15
List of Abbreviations
Abbreviation Full Form
ANN’s
MLP
Artificial Neural Networks
Multi-Layer Perceptron
MSE Mean Square Error
Disclaimer: The views, processes or methodologies published in this article are those of the author.
They do not necessarily reflect Dell EMC’s views, processes or methodologies.

2018 Dell EMC Proven Professional Knowledge Sharing 4
Abstract Prediction of future values of any physical or logical parameters would enable humans to plan better,
exploit opportunities, forecast better, optimize resources and make better decisions so that we can
enhance the way we live.
Time series prediction is based on modelling future values of any specific parameter based on its
current data. Time series-based models are average rainfall forecast, internet traffic rates, business
trend forecasting, weather forecast, contagious disease spread, etc.
Artificial neural networks (ANN) are increasingly becoming successful in predicting the time series data
through regression-based models. In this article, a benchmark timeseries model called Mackey-Glass
chaotic time series is predicted using feed forward multi-layer perceptron neural network with error
back propagation algorithm.
The architecture and algorithm developed in this article can easily be extended to any real world
timeseries prediction requirements.
2018 Dell EMC Proven Professional Knowledge Sharing 5
A1.1 Cognitive capabilities of ANN’s
Artificial neural networks are biologically inspired as its building block – artificial neuron – derived from
McCulloch Pitts model which tries to emulate biological neuron. Though artificial neural networks are not
able to emulate perfect behavior of a human brain, they could perform a number of other tasks that
humans do better than the traditional programming or rule-based systems.
Artificial neural networks can be designed with various combinations of interconnection of neurons
resulting in various topologies or structures with varying computations and connection weights that can
perform powerful human-like tasks.
ANN’s are naturally good in pattern (image or speech) recognition and association tasks where they almost
behave like or sometimes even better than humans. Their importance can be understood as they tend to
classify/categorize unseen data and are also able to predict unknown future trends. They learn by examples
and map inputs to output patterns. They are also fault tolerant and are robust in executing the tasks.
In some cases, artificial neural networks could face limitation of overfitting where the network results in
correct outputs during training but give incorrect results during the production. So, training them with a
variety of datasets is crucial so that the networks are robust.
A1.2 Assumptions of neural networks
Artificial neural networks are parallel structures which are constructed using a building block called artificial
neuron derived from McCulloch Pitts model which is designed to emulate biological neuron. The McCulloch
Pitts model of artificial neuron assumes a simple model and doesn’t match with the complexities of
biological neuron and thus the artificial neural networks have not achieved the perfect near human brain
emulation.
Artificial neural networks start with random initial behavior and can gradually get trained either with a
teacher (supervised) or without (unsupervised) depending on the application and scenario. The layers in
the network help in extracting the features of the inputs or in other words, layers within a network map
input space into feature space that can extract relevant logic needed for the network to result in desired
output. This training procedure is assumed to be similar to that of humans however, the logic determined
and information within the network remains a black box which is a major limitation of neural network.

2018 Dell EMC Proven Professional Knowledge Sharing 6
The topological connectivity of perceptron’s is another assumption from the interconnectivity of biological
neurons. As per professor Hebb, the neuron to neuron bonding improves as each of the neurons gets
activated due to the other. The same mechanism is assumed for artificial neural network where the
synaptic weights keep increasing in a competitive learning method when each of the neurons gets
activated due to the other. [1]
Neural networks also assume the adaptive nature of human behavior with changing environments. The
neural networks dynamically adapt to new inputs and accordingly adjust or modify the weights.
The feedback mechanism in neural networks is associated with memory which is another assumption of
human brain having memory.
There is also an inherent spatial influence of one neuron over the other in artificial neural networks similar
to a human brain where biological neurons related to a specific sense or task are spatially located in one
part of the brain and the neurons in that region influence one over the other.
A1.3 ANN’s are successful in delivering human like tools
Artificial neural networks have been reasonably successful in delivering specific tool sets which could
emulate human like behavior.
Artificial neural networks behave in some ways like humans, for instance when a neural network is newly
developed it behaves randomly like that of a human child. As the network is trained, the neural networks
become more and more result oriented similar to a child being trained.
There is also the memory part where the child remembers the learned experience so that it can be applied
later which is analogous to neural network which hardcodes the learnings in the form of synaptic weights
and feedback mechanism which could later be re-applied in real time. In fact, there is a possibility for
humans to forget the learnt things but a neural network doesn’t which can be considered superior over
humans in this perspective. [4][5]
Humans tend to pioneer in a specific field of learning instead of learning all fields as it’s difficult to master
in all subjects and similarly the neural networks are designed and implemented for specific tasks. A specific
neural network can become more efficient in performing a task when it is trained and exposed to more and
more data which is similar in the case of humans who can keep learning to improve overall intelligence.

2018 Dell EMC Proven Professional Knowledge Sharing 7
In many applications such as character recognition, a neural network once trained with sufficient data
could produce more accurate results compared to humans where there is a scope for human errors.
Neural networks have been successful in mapping a set of input dimensions to a set of output dimensions
where it is efficient in doing so and is useful in a wide variety of applications. [4][5]
Though there are a few limitations of neural networks like overfitting, instability, etc. there are ways to
overcome these. As today’s world is moving towards handling Big Data which has volume, veracity and
variety in data, neither the human interpretation manually or the traditional programming involving rule-
based systems can help in addressing applications such as prediction, character recognition, face
recognition, medical, security, etc. Neural networks can be robust in handling huge datasets accurately in
nonlinear dynamic environments.
A1.4 ANN’s Outlook
Artificial neural networks are looking to be more capable in today’s world of computing as the volume of
data involved in analysis is huge where the traditional rule-based systems and programming is inefficient.
As the dimensionality of the inputs (data) increase, the need for new approaches also increased due to
inherent challenges with existing tools. This space for new generation tools can be fulfilled by artificial
neural networks.
Newer training methods like metaheuristic approaches as training mechanisms for neural networks are
beginning to provide better results than existing training methods. Artificial neural networks with more
number of layers are now becoming popular and are called deep learning networks in areas especially
involving Big Data.
The parallel structure of artificial neural networks results in speedy response and hence are naturally
suitable for real time systems. It can be concluded that the artificial neural networks have great potential
to be adapted to solve complex problems now and in future.

2018 Dell EMC Proven Professional Knowledge Sharing 8
B 1.1 Mackey-Glass chaotic time series prediction:
The prediction of timeseries has always been a subject of interest as it can be related closely with many
real time models involving forecast. Mackey-Glass time series is one such dynamic chaotic timeseries which
is used as a benchmark for prediction. Mackey-Glass time series is a nonlinear chaotic timeseries whose
equation is given as (1).
(1)
The Mackey-Glass time series is predicted using the feed forward neural network using the error back
propagation algorithm efficiently which could later be extended to other real-time timeseries.
C1.1 Architecture of artificial neural network:
The Mackey-Glass time series can be predicted using feed forward multi-layer perceptron neural network.
The feed forward neural network that was architected for this prediction has two hidden layers where the
1st hidden layer has 6 neurons, 2nd hidden layer has 3 neurons and the output layer has 1 neuron.
Figure 1 details the architecture considered for this neural network.
Figure 1: Feed forward multi-layer perceptron neural network architecture

2018 Dell EMC Proven Professional Knowledge Sharing 9
The neurons in Figure 1 are fully connected such that the all inputs at input layer are applied to all the 1st
hidden layer neurons, the outputs of 1st hidden layer neurons are applied to all the 2nd hidden layers and all
the outputs of 2nd hidden layers are applied to output layer neuron.
The activation function of the hidden layer neurons is log sigmoid function and the activation function of
the output layer is linear function.
The Mackey-Glass time series is a nonlinear function and hence to predict this function it is required to
introduce non-linearity throughout the network which can be accomplished by using log sigmoid as the
activation function. The log sigmoid function is differentiable and hence its derivative can be used to
compute the error during backpropagation.
Since the time series prediction is a regression, the usage of linear function as activation function at output
justifies that we need continuous real values rather than binary values.
The selection of 6 neurons in 1st hidden layer and 3 neurons in 2nd hidden layer is better justified in section
D1.1 where it is shown that the mean square error during training is of the order 10-5 which supports the
suitability of this architecture to predict the given time series.
The network architecture with single layers didn’t achieve the error of the order 10-5 and networks with
multiple layers or other architectures with more neurons increases the complexity and resource
requirements. Hence, the 2-hidden layer feed forward network fits just with right resources to predict and
simultaneously achieves reasonable mean square error.
C1.2 The training algorithm for the feedforward MLP
The training algorithm that was used in the feed forward neural network to predict the Mackey-Glass time
series is backpropagation.
There are multiple algorithms available however backpropagation algorithm is sufficient to achieve best
results for the prediction of time series. The backpropagation algorithm includes derivatives of the
activation function and since the neural network architecture considered in section C1.1 has differentiable
activation functions such as log sigmoid and linear function, it is relatively simple to use backpropagation
algorithm to solve the time series prediction.

2018 Dell EMC Proven Professional Knowledge Sharing 10
The MATLAB code for predicting time series is mentioned in the Appendix and the corresponding neural
network architecture is mentioned in Figure 1.
The objective is to predict (t+6)th value of time series using the t, (t-6)th, (t-12)th and (t-18)th values of the
time series. The Mackey-Glass time series has a total of 1201 values of which the first 600 points will be
used for training the network and the remaining 600 points will be used for testing the results of the
network.
The feedforward neural network with error back propagation has two phases called forward phase and
backward phase. In the forward phase the inputs are propagated forward towards the output and in the
backward phase the error is computed at the end of each layer and propagated forward towards the
inputs.
C1.2.1 Forward Phase:
The following are steps involved in forward training phase and the variables used match with the code in
Appendix and architecture in figure 1:
n=5 (number of inputs including the bias)
m=6 (number of neurons in 1st hidden layer)
l=3 (number of neurons in 2nd hidden layer)
r=1 (number of neurons in output layer)
X is input vector and is of the order of (n x 1) which is (5 x 1) in this case and given by,
X =
[
𝑖𝑛𝑝(𝑡)𝑖𝑛𝑝(𝑡 − 6)𝑖𝑛𝑝(𝑡 − 12)𝑖𝑛𝑝(𝑡 − 18)
𝑏 ]
W is the weight matrix of the 1st hidden layer and is of the order (m x n) which is (6 x 5) in this network and
given by,
W =
[ 𝑤11 𝑤12 𝑤13 𝑤14 𝑤15𝑤21 𝑤22 𝑤23 𝑤24 𝑤25𝑤31 𝑤32 𝑤33 𝑤34 𝑤35𝑤41 𝑤42 𝑤43 𝑤44 𝑤45𝑤51 𝑤52 𝑤53 𝑤54 𝑤55𝑤61 𝑤62 𝑤63 𝑤64 𝑤65]
2018 Dell EMC Proven Professional Knowledge Sharing 11
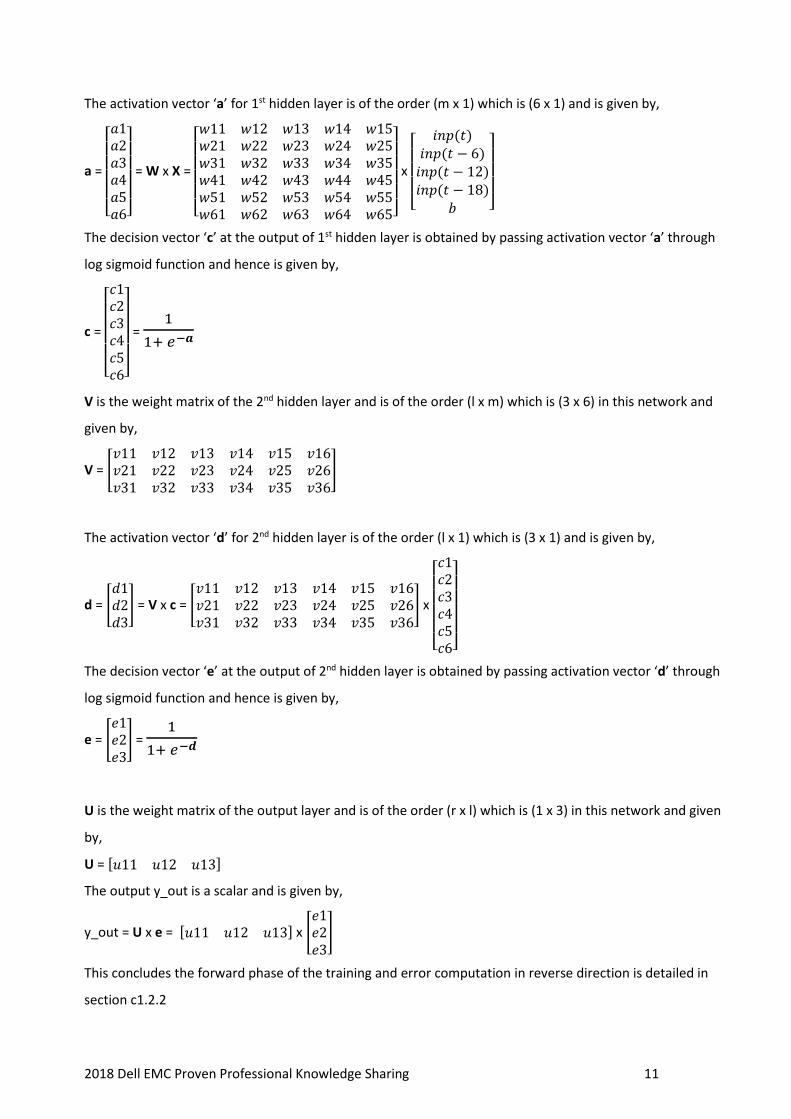
The activation vector ‘a’ for 1st hidden layer is of the order (m x 1) which is (6 x 1) and is given by,
a =
[ 𝑎1𝑎2𝑎3𝑎4𝑎5𝑎6]
= W x X =
[ 𝑤11 𝑤12 𝑤13 𝑤14 𝑤15𝑤21 𝑤22 𝑤23 𝑤24 𝑤25𝑤31 𝑤32 𝑤33 𝑤34 𝑤35𝑤41 𝑤42 𝑤43 𝑤44 𝑤45𝑤51 𝑤52 𝑤53 𝑤54 𝑤55𝑤61 𝑤62 𝑤63 𝑤64 𝑤65]
x
[
𝑖𝑛𝑝(𝑡)𝑖𝑛𝑝(𝑡 − 6)𝑖𝑛𝑝(𝑡 − 12)𝑖𝑛𝑝(𝑡 − 18)
𝑏 ]
The decision vector ‘c’ at the output of 1st hidden layer is obtained by passing activation vector ‘a’ through
log sigmoid function and hence is given by,
c =
[ 𝑐1𝑐2𝑐3𝑐4𝑐5𝑐6]
= 1
1+ 𝑒−𝒂
V is the weight matrix of the 2nd hidden layer and is of the order (l x m) which is (3 x 6) in this network and
given by,
V = [𝑣11 𝑣12 𝑣13 𝑣14 𝑣15 𝑣16𝑣21 𝑣22 𝑣23 𝑣24 𝑣25 𝑣26𝑣31 𝑣32 𝑣33 𝑣34 𝑣35 𝑣36
]
The activation vector ‘d’ for 2nd hidden layer is of the order (l x 1) which is (3 x 1) and is given by,
d = [𝑑1𝑑2𝑑3
] = V x c = [𝑣11 𝑣12 𝑣13 𝑣14 𝑣15 𝑣16𝑣21 𝑣22 𝑣23 𝑣24 𝑣25 𝑣26𝑣31 𝑣32 𝑣33 𝑣34 𝑣35 𝑣36
] x
[ 𝑐1𝑐2𝑐3𝑐4𝑐5𝑐6]
The decision vector ‘e’ at the output of 2nd hidden layer is obtained by passing activation vector ‘d’ through
log sigmoid function and hence is given by,
e = [𝑒1𝑒2𝑒3
] = 1
1+ 𝑒−𝒅
U is the weight matrix of the output layer and is of the order (r x l) which is (1 x 3) in this network and given
by,
U = [𝑢11 𝑢12 𝑢13]
The output y_out is a scalar and is given by,
y_out = U x e = [𝑢11 𝑢12 𝑢13] x [𝑒1𝑒2𝑒3
]
This concludes the forward phase of the training and error computation in reverse direction is detailed in
section c1.2.2
2018 Dell EMC Proven Professional Knowledge Sharing 12
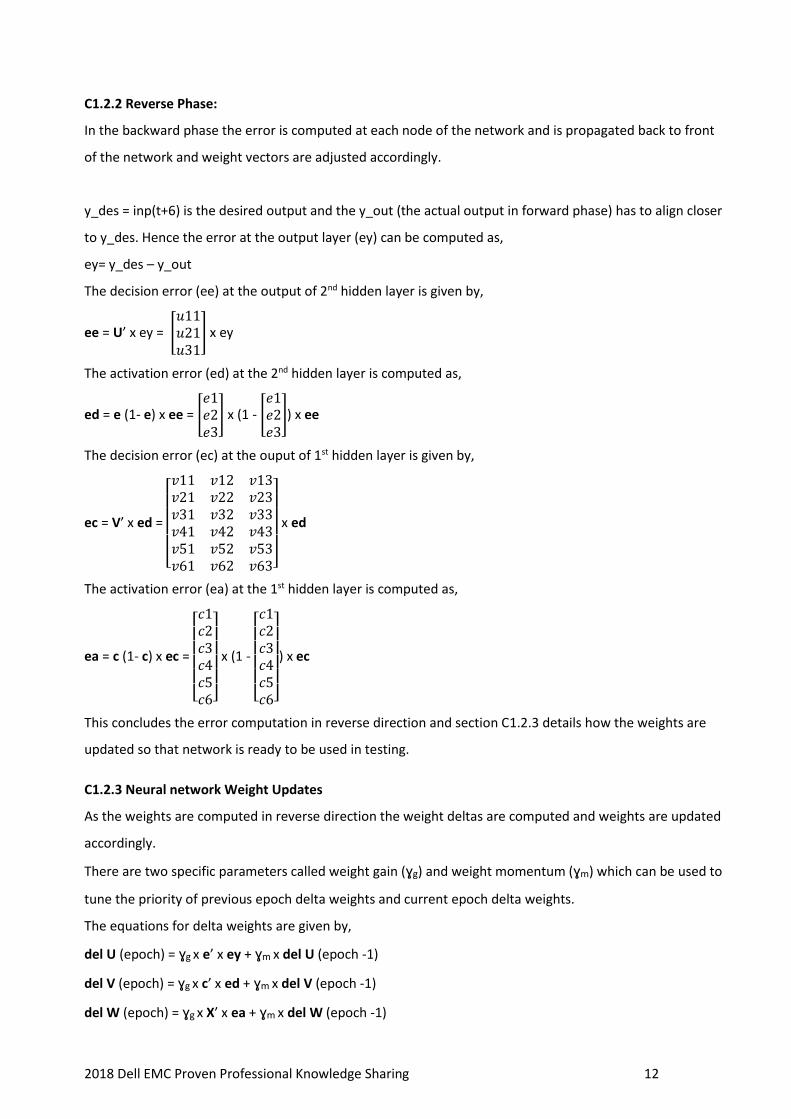
C1.2.2 Reverse Phase:
In the backward phase the error is computed at each node of the network and is propagated back to front
of the network and weight vectors are adjusted accordingly.
y_des = inp(t+6) is the desired output and the y_out (the actual output in forward phase) has to align closer
to y_des. Hence the error at the output layer (ey) can be computed as,
ey= y_des – y_out
The decision error (ee) at the output of 2nd hidden layer is given by,
ee = U’ x ey = [𝑢11𝑢21𝑢31
] x ey
The activation error (ed) at the 2nd hidden layer is computed as,
ed = e (1- e) x ee = [𝑒1𝑒2𝑒3
] x (1 - [𝑒1𝑒2𝑒3
]) x ee
The decision error (ec) at the ouput of 1st hidden layer is given by,
ec = V’ x ed =
[ 𝑣11 𝑣12 𝑣13𝑣21 𝑣22 𝑣23𝑣31 𝑣32 𝑣33𝑣41 𝑣42 𝑣43𝑣51 𝑣52 𝑣53𝑣61 𝑣62 𝑣63]
x ed
The activation error (ea) at the 1st hidden layer is computed as,
ea = c (1- c) x ec =
[ 𝑐1𝑐2𝑐3𝑐4𝑐5𝑐6]
x (1 -
[ 𝑐1𝑐2𝑐3𝑐4𝑐5𝑐6]
) x ec
This concludes the error computation in reverse direction and section C1.2.3 details how the weights are
updated so that network is ready to be used in testing.
C1.2.3 Neural network Weight Updates
As the weights are computed in reverse direction the weight deltas are computed and weights are updated
accordingly.
There are two specific parameters called weight gain (ɣg) and weight momentum (ɣm) which can be used to
tune the priority of previous epoch delta weights and current epoch delta weights.
The equations for delta weights are given by,
del U (epoch) = ɣg x e’ x ey + ɣm x del U (epoch -1)
del V (epoch) = ɣg x c’ x ed + ɣm x del V (epoch -1)
del W (epoch) = ɣg x X’ x ea + ɣm x del W (epoch -1)

2018 Dell EMC Proven Professional Knowledge Sharing 13
The weights are updated in ONLINE training process rather than batch training to increase the efficiency in
predicting the time series. The weight update equations are given by,
U = U + del U
V = V + del V
W = W + del W
The training is performed for 8000 epochs and the weights are updated ONLINE after each training input
sample.
The training algorithm (error backpropagation), the number of epochs and training method used (ONLINE
training) can be easily justified for predicting the given time series as this is not only a simple approach but
also efficient. The error backpropagation is chosen as all the activation functions used by neurons in the
feedforward network are differentiable and the ONLINE training method resulted mean square error of the
order of 10-5 which can be considered efficient.
D1.1 Results of time series prediction
The MATLAB code mentioned in the Appendix predicts the 1201 sample Mackey-Glass time series. The
code is developed based on training algorithm mentioned in section C1.2.
Figure 2 details the plot of time series prediction in MATLAB where the actual Mackey-Glass time series
desired output is plotted in RED. The training output is in BLUE and is plotted for input samples from 1 to
600 and the testing output is represented in GREEN and is plotted for predicted samples from 601 to 1201.
Figure 2: Plot of Mackey glass time series prediction in MATLAB

2018 Dell EMC Proven Professional Knowledge Sharing 14
Figure 2 shows that the training output in BLUE very closely coincides with the desired output RED and
similarly the testing output in GREEN also very closely approximates the desired output in RED. Hence, the
testing can be said to be successful.
Figure 3 details the mean square error obtained during the training procedure at each epoch and it can be
seen that the mean square error decreases over the epochs. The total of 8000 epochs were sufficient and
the code has achieved the mean square error of 5.2 x 10-5 during testing phase.
Figure 3: Plot of mean square error during training process
D1.2 Conclusion
The Mackey-Glass time series can be efficiently predicted by multilayer perceptron network with error
backpropagation algorithm. There are multiple different network topologies and different algorithms to
predict this time series.
The mean square error achieved during testing phase was of the order 10-5 which is a very good measure to
state the efficiency of the network architecture (mentioned in Figure 1) and the algorithm used (detailed in
section C1.2).
It is also important to consider the number of training epochs used to train a network which in this case
was 8000 epochs that was sufficient to result in desired network. The network topology of 5 x 6 x 3 x 1 was
one of the appropriate networks to achieve the above mentioned MSE with 8000 epochs. There are other
tuning parameters such as learning gain and learning momentum which are tuned appropriately in the
CODE mentioned in the Appendix for this time series.

2018 Dell EMC Proven Professional Knowledge Sharing 15
It can be concluded that the multilayer perceptron network with two hidden layers and error back
propagation algorithm can predict this time series with reasonable computing power and simple
architecture.
References
[1]“Jack V. Tu, Advantages and disadvantages of using artificial neural networks versus logistic regression
for predicting medical outcomes, In Journal of Clinical Epidemiology, Volume 49, Issue 11, 1996, Pages
1225-1231, ISSN 0895-4356.”
[2]“Neural Networks: Capabilities & Applications ROBERT C.SASS Stanford Linear Accelerator Center,
Stanford University, Stanford, California 94309”
[3]“Šíma J. (2001) The Computational Capabilities of Neural Networks. In: Kůrková V., Neruda R., Kárný M.,
Steele N.C. (eds) Artificial Neural Nets and Genetic Algorithms. Springer, Vienna.”
[4]“Ubiquity, Volume 4, Issue 37, Nov. 12 - 18, 2003, http://www.acm.org/ubiquity/”
[5]“Urolagin, Siddhaling & kv, Prema & Reddy, N V Subba. (2011). Generalization Capability of Artificial
Neural Network Incorporated with Pruning Method. 7135. 171-178. 10.1007/978-3-642-29280-4_19.”

2018 Dell EMC Proven Professional Knowledge Sharing 16
Appendix Matlab code for Mackey-Glass chaotic time series
clear; clc; close all; %%%%%%%%%%%%%%%Variable Declaration%%%%%%%%%%%%%%%%%%%%%%%%%%%% n=5; %no of inputs r=1; %no of outputs m=6; %no of neurons in 1st hidden layer l=3; %no of neurons in 2nd hidden layer gamma_g=0.1; gamma_m=0.95; b=1; w=0.2*rand(m,n)-0.1; %weights of 1st hidden layer v=0.2*rand(l,m)-0.1; %weights of 2nd hidden layer u=0.2*rand(r,l)-0.1; %weights of output layer delw=zeros(m,n); delv=zeros(l,m); delu=zeros(r,l); load mgdata.dat; inp=mgdata(:,2); x=1:1:1201; y_out=zeros(1,1201); for t1=1:24 y_out(t1)=inp(t1); end %%%%%%%%%%%%%%%Training%%%%%%%%%%%%%%%%%%%%%%%%%%%% for epoch=1:8000 for t = 19:594 gamma_m=gamma_m*t/594; x1=inp(t-18); x2=inp(t-12); x3=inp(t-6); x4=inp(t); vec_x=[x1;x2;x3;x4;b]; a=w*vec_x; c=1./(1+exp(-a)); d=v*c; e=1./(1+exp(-d)); y_out(t+6)=u*e; y_des=inp(t+6);

2018 Dell EMC Proven Professional Knowledge Sharing 17
ey=y_des-y_out(t+6); ee=u' * ey; ed=e.*(1-e).*ee; ec=v' * ed; ea=c.*(1-c).*ec; error(t)=ey; delu=gamma_g*ey.*e' + gamma_m*delu; delv=gamma_g*ed.*c' + gamma_m*delv; delw=gamma_g*ea.*vec_x' + gamma_m*delw; u=u+delu; v=v+delv; w=w+delw; end train_mse(epoch) = mean((error).^2); end %%%%%%%%%%%%%%%Testing%%%%%%%%%%%%%%%%%%%%%%%%%%%% for t = 595:1195 z1=inp(t-18); z2=inp(t-12); z3=inp(t-6); z4=inp(t); vec_z=[z1;z2;z3;z4;b]; a1=w*vec_z; c1=1./(1+exp(-a1)); d1=v*c1; e1=1./(1+exp(-d1)); y_out(t+6)=u*e1; y_test(t+6)=u*e1; err(t)=inp(t+6)-y_test(t+6); end test_mse=mean((err).^2); %%%%%%%%%%%%%%%Output Plotting%%%%%%%%%%%%%%%%%%%%%%%%%%%% figure; plot(x,inp,'r-',x,y_out,'b:',x,y_test,'g:','lineWidth',2) axis([0 1201 0.2 1.4]); grid on xlabel('Input to the Neuron') ylabel('Output of the Neural Network') legend('Desired Output','Training Output','Testing Output','Location','North') title('Mackey-Glass Time Series Prediction') figure; plot(train_mse,'b'); grid on xlabel('epochs') ylabel('mse train error') title('Error during training') fprintf(1,'mse test error is %f',test_mse) ===================================================================

2018 Dell EMC Proven Professional Knowledge Sharing 18
Dell EMC believes the information in this publication is accurate as of its publication date. The information
is subject to change without notice.
THE INFORMATION IN THIS PUBLICATION IS PROVIDED “AS IS.” DELL EMC MAKES NO RESPRESENTATIONS
OR WARRANTIES OF ANY KIND WITH RESPECT TO THE INFORMATION IN THIS PUBLICATION, AND
SPECIFICALLY DISCLAIMS IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR
PURPOSE.
Use, copying and distribution of any Dell EMC software described in this publication requires an applicable
software license.
Dell, EMC and other trademarks are trademarks of Dell Inc. or its subsidiaries.


















