Behavioral Types of Predator and Prey Jointly Determine Prey ...

of 14
Upload
raaj-chatterjeeCategory
view
218download
08/11/2019 Predator - Prey Modelling Using Differential Equations
1/14
The Mathematics of Predator-Prey RelationshipsHow can ecological predator-prey systems be modelled using differential
equations?
Candidate Number: 000159-0005
Candidate Name: Raaj Chatterjee
School: Semiahmoo Secondary
Examination Session: May 2014
1
8/11/2019 Predator - Prey Modelling Using Differential Equations
2/14
Introduction
One of the most important challenges of our time is solving the worlds environmental and ecological crise
One way of gaining insight into predator-prey systems that are an important component of all ecosystems is u
math to model trends and cycles of populations. I have personally worked heavily in the field of sustainability
ecology in my community. I believe that using differential equations to model complex ecological systems ca
greatly help the work of researchers and ecologists. I will examine a predator-prey system consisting of Wolf
Moose on Isle Royale National Park, Michigan, USA. Researchers on Isle Royale, an isolated island on Lake
Superior, have been collecting and analysing population data of the two species since 1958 (Vucetich 2).
Simple predator-prey systems are mostly modelled by Lotka-Volterra nonlinear, first-order differential
equations. Through this exploration I will first model the wolf-moose system on Isle Royale. Then, I will use
multivariable calculus to prove my method and find the precise equation of the solution curve. The
Lotka-Volterra equation will then be modified with the logistic equation to model a more realistic scenario. I
consider the benefits and limitations of using differential equations to model ecological systems. I will consid
other important factors such as climate change, disease, human interaction, and natural disasters as well.
The study of population dynamics is key to understanding how nature keeps its balance and how we as a
society can minimize damage done and even help rejuvenate endangered species populations in all parts of th
world. Using calculus to model these biological relationships is an excellent method. However this is only the
step action needs to be taken to protect the wildlife of earth for future generations.
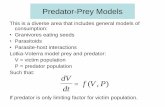
1. The Lotka-Volterra Equation
Predator-prey systems involve two species. One is known as the prey with an assumed sufficient food supp
The other is a predator which feeds on the prey. My model of this system excludes external factors such as oth
predators, habitat loss, and human intervention. The number of the predator and prey are represented by a
dependent variable which is a function of time. Mathematicians Alfred Lotka and Vito Volterra developed
simultaneously yet independently differential equations to model the growth and decline of predator and prey
populations (Hyde 2). These equations rely on some assumptions (this example involves ladybugs and aphids
2
8/11/2019 Predator - Prey Modelling Using Differential Equations
3/14
1. A prey population is shown to exhibit exponential growth with an ample food supply:
A(t) is the number of aphids at any point in time.
where k is a positive constantAdtdA =k
2. In contrast, when there is an absence of prey, the predator population of the ladybug represented byL(t)
would experience decline proportional to itself.
where r is a positive constant. LdtdL = r
3. It is assumed that the death of the prey is mostly due to the predator, and the available food source of the
predator mainly consists of the prey. Thus it assumed that the product of the prey and predator populations (L
is proportional to the death of prey and growth of predators (Stewart 638).
From these assumptions the following equations, known as the Lotka Volterra equations are derived:
Prey: Predator
A LAdt
dA =k L LAdtdL = r +
Where and are constants. is the rate that the prey die at each predator-prey interaction while is the rat
that the predator population increases at each predator-prey interaction (Stewart 639).
2. Case Study: The Wolves and Moose of Isle Royale
Since 1959, researchers at Isle Royale National park have been collecting data on the population dynamics
Wolves and Moose on the largest island, Isle Royale, which has an area of 535.4km2. This long-term researc
project is supported by the National Parks Service and National Science Foundation (Vucetich 2). Being the
longest running predator-prey study in the world, it is well known to ecologists and has found much data on
population dynamics (Vucetich 3). The graph below shows the wolf and moose populations for the last 44 ye
(Source: The Studies of Wolves on
Isle Royale: Annual Report 2012-13)
The cyclical patterns of Moose and
Wolf populations are characteristic of
a predator-prey relationship. Ninety
percent of the biomass of the wolves
diet is moose and are thus the mooses
3
8/11/2019 Predator - Prey Modelling Using Differential Equations
4/14
primary predator. (Population Biology of Isle Royale) Steady cyclical patterns occurred until the year 1980
where the wolf population suffered heavily from a human-introduced disease. There was a peak in moose
populations until a crash in 1996 due to intense competition and flea outbreaks. The populations have relative
stabilized thus far. However, the wolves are on a downturn (Vucetich 6). From this data and more observatio
the researchers found the parameters to the Lotka-Volterra equation: growth rate of moose, average mortality
rate of wolves (r and k).
From values and population figures in the Wolves and Moose Project, I calculated my own constants
and . For I multiplied the average predation rate ( ), average wolf population density, avera um/#ofyearss
moose population density, all divided by the Moose dead per grown wolf per year. is similar however rath
than dividing by the moose dead per grown wolf, it is multiplied by the wolf population growth of a given yea
used 1970). This gives us all the parameters necessary for the Lotka-Volterra model. The constants found by
the Wolves and Moose of Isle Royale project and I are as follows (Vucetich, Isle Royale Graph Data):
When the wolf population the lowest (1990):
Maximum Growth rate of moose (k)= 0.138
Average Mortality rate of wolf (r)= 0.25
Sum of Predation Rates from 1971-2010: 4.0758
Average Death of Moose per interaction ( )
= Average Predation Rate Avg. Wolf Pop. Density Avg. Moose Pop. Density Moose dead per grown
wolf
= 0.099 0.0428 wolves/km 1.80 moose/km 20
= 0.000385
Wolf Population Growth rate per wolf-moose interaction ( )
= 1 year Population growth Predation Rate Avg. Wolf Pop. Density Avg. Moose Pop. Density
= 2 0.062 0.0428 wolves/km 1.80 moose.km
= 0.00956
The data was taken from a spreadsheet report from the Wolves and Moose of Isle Royale project. The
growth rate taken was the highest one on the spreadsheet in the year 1990 as this represents the growth rate w
minimum predator intervention. The mortality rate of the wolf was averaged as was the average predation rate
The parameter was derived using the wolf population increase data and the predation rate in 1971. There ar
4
8/11/2019 Predator - Prey Modelling Using Differential Equations
5/14
limitations to the data as it was only after 1990 that aerial surveying was used, thus the populations and
parameter have an uncertainty on them (Population Biology). Also there are possible errors in the processing
the parameters, however this data will be used to approximate a model thus a small deviation is acceptable.
After some test graphing using the maximum and minimum number of wolves (min. 12, max. 50) and mo
(min. 385, max. 2398). I refined these theoretical values to practical values that will apply to populations. The
significant difference was doubling the wolf mortality rate to 0.40 in order for the solutions of the differential
equation to fit the population fluctuations described in the project data. This reflects a limitation in the data an
method used. Often many modifications must be made to data to use the Lotka-Volterra method.
Wolf population is represented by Wwhile moose population is represented byM. With the refined
parameters k =0.16, r = 0.4, =0.0004, and = 0.009, the Lotka-Volterra equations are:
Predator: Prey:
W W MdtdW = r + M MWdt
dM =k
.4W .0004W MdtdW = 0 + 0 .16M .009MWdt
dM = 0 0
These are currently differentiated over time, however we want to see how the wolf population changes agains
the changes in the moose population. Thus we must calculate .dWdM
Using chain rule:
dt
dW= dW
dM
dt
dM
dW
dM =
dt
dW
dt
dM
dW
dM =
0.16M 0.009MW
0.4W +0.0004WM
The differential equation will be graphed and analysed as a predator-prey model.dWdM
=0.16M 0.009MW
0.4W +0.0004WM
First we must find the constant solutions of of the variables.
W and M will be constant if and equal zero.dtdW
dtdM
.4W .0004W M 0dtdW
= 0 + 0 = .16M .009MWdtdM
= 0 0
( .4 .0004M) 0W 0 + 0 = (0.16 .009W) 0M 0 =
.4 .0004M 0 0 + 0 = .16 .009W 00 0 =
.0004M 0.40 = .009W .16 0 = 0
moose000M = 0.40.0004
= 1 wolves7.7 8W = 0.160.009
= 1 1
5
8/11/2019 Predator - Prey Modelling Using Differential Equations
6/14
Thus the constant solution is approximately (1000,18) meaning that a population of 1000 moose could
support 18 wolves and vice versa with minor fluctuation. This is known as the equilibrium solution (Stewart 6
The other constant solution is W=0 and M=0 or (0,0) where there are no moose nor wolves.
This differential equation can now be graphed on aMW-plane (moose-wolf plane). This is known as the
phase plane, while solution curves to the differential equation are known as phase trajectories. (Stewart 640)
used the graphing software GeoGebra to graph and solve this differential equation for various starting
populations.
Figure 2. Direction field of Lotka-Volterra differential equation.dWdM
= 0.16M 0.009MW
0.4W +0.0004WM
The phase plane and direction field caused by the differential equation is showndWdM
= 0.16M 0.009MW
0.4W +0.0004WM
above. Point B is the equilibrium solution at (1000,18) while points A, B, C, and D represent various phase
trajectories depending on starting populations (see fig. 3). Together these solutions form the phase portrait wh
consists of equilibrium points (point B) and phase trajectories, or solution curves (Stewart 640).
6
8/11/2019 Predator - Prey Modelling Using Differential Equations
7/14
Figure 3. Phase portrait of Wolf-Moose system.
I will only focus on one phase trajectory (see fig. 4) for the remainder of this case and compare it to the
population fluctuations on Isle Royale. In the year 1980 there were 788 moose and 50 wolves, the highest wo
population that existed on the island during the study (Vucetich, Isle Royale Graph Data). This point will be
represented by Point F. Point G represents a hypothetical minimum number of moose, while point H represen
maximum. Point I represents a hypothetical minimum number of wolves. All points are rounded to the neares
whole number. It is important to note that this curve does not completely represent the situation on Isle Royal
Never in the last sixty years has there been a minimum of 3 wolves (Vucetich, Isle Royale Graph Data).
However this model provides insight into the natural predatory cycles of wolves and their prey, the moose.
Figure 4. Phase trajectory with Initial value (788,50)
7
8/11/2019 Predator - Prey Modelling Using Differential Equations
8/14
After observing this graph we can see that the there is a correspondence with the actual data. In 1994 for
example, there were 17 wolves and 2017 moose. This is very close to point H where there are 18 wolves and
2061 moose. Similarly in 2007, there were 21 wolves and and 385 moose. This is close to point G with 18
wolves and 386 moose. This indicates a half cycle of 13 years (1994-2007), and thus full cycles of 26 years
approximately in this model. Indeed between peaks in moose population (years 1996 and 1972) there is a 24
year period of oscillation (Vucetich, Isle Royale Graph Data). Thus the Lotka-Volterra model of differential
equations provides some insight into the nature of isolated predator-prey systems.
3. Finding Phase Trajectories Using Multivariable Calculus:
Another way to visualize the phase trajectory of a predator-prey system is that it is the line of
intersection between a plane and a three-dimensional surface (Hyde 8). In this case the surface is on a graph
defined by the wolf population, moose population, and a third axes, labelled Q for our purposes. Due to this,
finding the equation of the solution curve is difficult. However, we can use partial derivatives which define an
on which the derivative of the 3D surface is taken. This solution is defined as a conserved quantity Q(x,y) or
Q(M(t),W(t)) that equals a constant K which represents a specific contour line of the surface (Hyde 7).
Starting with the original equations:
1. Moose Population: 2. Wolf Population:M MWdtdM =k W W Mdt
dW = r +
We multiply each side by :1WM
1. 2.dtdM 1WM=
kW dt
dW 1WM = Mr +
Multiplying each side by the derivative of the other equation:
1. 2.( )dtdM dt
dW 1WM = dtdW k
W ( )dtdW dt
dM 1WM= dtdM
Mr +
Subtracting Equation 2 from 1:
_ ( )dtdM dt
dW 1WM= dtdW k
W
( )dtdW dt
dM 1WM = dtdM
Mr +
_____________________________
0 = ( ) ( )dtdW k
W + dtdM r
M We are looking for a function where Q(M(t),W(t)) = K. Differentiating both sides gives us .dt
dQ= dt
dK = 0
Now we must begin to use partial derivatives signified by . These are derivatives of a 3D surface taken wi
respect to a certain axis (Hyde 4). In the case of Q(M,W), we can multivariable chain rule which states that
Q(M, ) Q(M, ) Q(M, )ddt W = dtdW
W W + dtdM
M W
8
8/11/2019 Predator - Prey Modelling Using Differential Equations
9/14
Because dtdQ
= 0
and 0 = ( ) ( )dtdW k
W + dtdM r
M
and Q(M, ) Q(M, ) Q(M, )ddt W = dtdW
W W + dtdM
M W
From this system of equations we can see that if:and if:Q(M, ) )
W W = (kW Q(M, ) )
M W = (rM
Then Q(M(t),W(t)) is constant even as t varies. Thus we do not need t to integrate and find the solution plane
(M, ) ( )W ( )MQ W =
kW =
rM
(M, ) kln|W| W (M) rln|M| M g(W)Q W = +f = +
When we integrate multivariable equations the constant term is actually a function of the other variable as it t
place in 3D space. Because we used partial derivatives however, we can eliminate the functions as a constan
say,I (Hyde 7). Combining the two equations we get:
(M, ) kln|W| rln|M| W M IQ W = + +
We can create another constant J, that the conserved quantity (value of Q(M,W)) is equal to. Thus:
kln|W| rln|M| W M IJ= + +
And: kln|W| rln|M| W MJI = +
Now, taking thatK = J - Iand Q(M,W) = K, we get:
(M, ) kln|W| rln|M| W MQ W = +
We can remove the absolute value signs as both wolf and moose populations are positive. Substituting our
coefficients we get:
(M, ) 0.16lnW 0.4lnM .0004W .009MQ W = + 0 0
Graphing this function using Wolfram Alpha we see:
The contour lines on the surface indicate phase
trajectories for different values ofK where Q(M,W) =K.
When graphed on a W-M plane, these contour lines are the
solutions to as shown indWdM
= 0.16M 0.009MW
0.4W +0.0004WM
Figure 3. Thus at a specific value of K, the solution curve in
Figure 4 is the contour line to this 3D surface. To find this
K-value we can plug in the the starting point F(788, 50) into
this multivariable function:
9
8/11/2019 Predator - Prey Modelling Using Differential Equations
10/14
.(788, 0) 0.16ln(50) 0.4ln(788) .0004(50) .009(788)Q 5 = + 0 0
And: . Thus we can find the equation for the solution of our phase trajectoryQ(788, 0) .82K= 5 = 3
in figure 4 which is ..82 0.16lnW 0.4lnM .0004W .009M 3 = + 0 0
4. The Logistic ModelA more realistic model includes the logistic equation and thus the carrying capacity of thP(1 ))( dt
dP =k KP
moose population (Stewart 642). The a logistic differential equation will have solutions known as S-curves w
show exponential growth until an inflection point where the graph begins to level off towards a specific carryi
capacity (K) (Stewart 629). Since the maximum moose population in the recorded data on Isle Royale is 2398
3000 will be taken as the approximate carrying capacity. Using the same coefficients as in the Lotka-Volterra
model, k =0.16, r = 0.4, =0.0004, and = 0.009, K=3000, the equations are as follows:
Predator: Prey:
W W MdtdW = r + M(1 ) MWdt
dM =k KM
.4W .0004W MdtdW = 0 + 0 .16M(1 ) .009MWdt
dM = 0 M2400
0
Using chain rule:dt
dW=
dM
dW
dt
dM
= 0.16M0.009MWdtdM
= 0.4W+0.0004WMdtdW
=dM
dW=
0.4W+0.0004WM
0.16M(1 ) 0.009MWM3000
By using this differential equation a different phase trajectory appears on the phase plane:
Figure 6. Phase trajectory of logistic model: A(788, 50), K(1000,12)
10
8/11/2019 Predator - Prey Modelling Using Differential Equations
11/14
This logistic model implies that an eventual equilibrium can be reached at (1000,12) due to the carrying
capacity of the moose that equals approximately 3000 before competition and disease stabilize the population
5. Comparing Population Models to Real Data
While devising the differential equations model population changes on Isle Royale, I made a number of
assumptions. In addition to the base assumptions of the Lotka-Volterra equation (See Section 1), it is also
assumed that there is no disease, no human intervention, no intra-species competition, and no external predato
In order to examine the effects of these natural and human forces, we can compare data from the model to the
real data and reflect upon the accuracy of such modelling.
From any phase trajectory we can create separate graphs for the variable per time. As I did not have any
software that would automatically trace the solution with starting point (788,50), I did this by finding the Wa
Mcoordinates at regular intervals along the phase plane. Then I graphed them against an arbitrary amount of
time.
It is impossible to derive an exact expression for these new functions, W(t)andM(t)which oscillate in cycles
time progresses (Stewart 641). The original differential equation: is split into
dW
dM =
0.4 +0.0004WM
0.16M 0.009MW
and From here we can find W(t) and M(t).4W .0004W MdtdW = 0 + 0 .16M .009MW.dt
dM = 0 0
graphically. I took 63 data points of wolf and moose coordinates. By graphing these data points on two differe
axes over the same arbitrary amount of time, we obtain the graphs on the following page.
11
8/11/2019 Predator - Prey Modelling Using Differential Equations
12/14
Figure 8.M(t)and W(t)
Comparing these two graphs, we see that there are similarities between the Lotka-Volterra model and the
actual data, particularly between the years of 1969 and 1999. During these 20 years, the wolf and moose
populations match to some extent one oscillation of the solutions to the dW/dt and dM/dt differentials. In Figu
8 approximately 1.25 periods of oscillation are shown. However the many differences between the graphs
reduce significantly the practical reliability of the model. This points out other important factors that have aff
the wolf population such as accidental human-introduced disease that caused a wolf population crash in 1979
12
8/11/2019 Predator - Prey Modelling Using Differential Equations
13/14
To account for this we can shift the phase difference in the curve describing the moose population. Thus upon
reflection, the Lotka-Volterra model is only capable of providing approximations of population changes.
Conclusion and Reflection
In this exploration I investigated dynamic population systems using the Lotka-Volterra model and the logist
model. The applications of calculus in the natural world are far-reaching. Using this research, ecologists are a
to predict when a population will be at equilibrium, and what population thresholds are necessary to observe i
conservation efforts. This case study of the wolves and moose on Isle Royale proved overall to be successful.
calculating the parameters of the Lotka-Volterra equation from data collected by researchers in the field this
exploration gave me insight to the work of ecologists specializing in population dynamics. In a comparison wpast numbers of wolves and moose, the Lotka-Volterra model showed many similarities. With some refining,
accurate model can be constructed. For example, the moose and wolf populations in the years 1994 and 2007
correspond almost exactly with the maximum moose and wolf populations in the model. Also, when graphed
against time, the Lotka-Volterra differential equations will show much similarity with the actual population c
of an isolated predator-prey system. Building the 3-dimensional model using partial derivatives from where th
dW/dMsolution curves are derived expanded my knowledge of calculus and modeling greatly.
There are limitations to this model such as the carrying capacity of the moose. This is addressed in the logis
model which produces a very different, spiral curve that travels towards equilibrium. Both models however
assume that climate, habitat loss, other predators, and disease are negligible. Even in rare isolated situations su
as Isle Royale, this is not the case. In my community I advocate for policy that will reduce emission and thus
global climate change. Indeed changes in climate such as warmer summers lead to an increase in parasite
population and thus a decrease in the amount of moose. A disease introduced by a domestic dog in the 1980s
for example brought down the wolf population significantly. There are many limitations to both models. Howthere are more complex three-dimensional models that can also calculate other species populations and accou
for climate and disease. While nature is mostly random, models not only allow for the predicting of trends, bu
greater knowledge of how we can protect our ecosystems for years to come.
13
8/11/2019 Predator - Prey Modelling Using Differential Equations
14/14
List of Sources:
Stewart, James. Single Variable Calculus Early Transcendentals. 5th ed. Belmont:
Brooks/Cole, 2003. Print.
The Population Biology of Isle Royale Wolves and Moose: An Overview. The Wolves and
Moose of Isle Royale. n.p. n.d. Web. 7 Jan. 2014.
Vucetich, John, and Rolf Peterson.Ecological Studies of Wolves on Isle Royale
Annual Report 201213. Houghton: Michigan Technological University. 4 Mar.
2013. Web. 8 Jan. 2014.
Hyde, David. Predator-Prey Modeling with the Lotka-Volterra Equations. n.p. 24 Jul. 2011. Web. 23 Jan.
2014.
Vucetich, JA and Peterson. Isle Royale Graph Data. n.p. 28 Dec. 2011. Excel Spreadsheet. 6 Jan. 2014.
14