Polynomial chaos expansion with fuzzy and random ...michael.friswell.com/PDF_Files/C406.pdf ·...
12
Polynomial chaos expansion with fuzzy and random un- certainties in dynamical systems E. Jacquelin 1, 2, 3 , M.I. Friswell 4 , S. Adhikari 4 , O. Dessombz 5 , J.-J. Sinou 5, 6 1 Universit´ e de Lyon, F-69622, Lyon, France. e-mail: [email protected] 2 Universit´ e Claude Bernard Lyon 1, Villeurbanne. 3 IFSTTAR, UMR-T9406, LBMC Laboratoire de Biom´ ecanique et M´ ecanique des chocs, F-69675, Bron. 4 College of Engineering, Swansea University, Swansea SA2 8PP, UK. 5 ´ Ecole Centrale de Lyon, LTDS Laboratoire de Tribologie et Dynamique des Syst` emes, UMR CNRS 5513, F-69134, ´ Ecully - France. 6 Institut Universitaire de France, 75005 Paris, France. Abstract This paper proposes a surrogate model which is able to deal with mixed uncertain dynamical systems: some uncertain parameters are modelled by random variables whereas others are represented by fuzzy variables. Polynomial chaos expansions (PCE) were developed for uncertainty propagation through random systems. However, fuzzy variables may also be described with polynomial chaos: in particular, Legendre polynomials are well adapted to fuzzy variables. Hence we propose a polynomial chaos expansion, which is able to describe an uncertain dynamical system with both random and fuzzy variables. The method is applied to simulate an uncertain bar and the results are compared to MCS results. Thus the PCE is successfully applied to dynamical systems with both fuzzy and random uncertainties. This study also highlights the issue of the description of the outputs: which quantities should be calculated to represent the behaviour of the uncertain outputs? In the case studies, the fuzzy mean and the fuzzy standard deviation are used to describe the output properties. 1 Introduction The study of uncertain systems requires three different steps. First, uncertainties must be modelled [1, 2]. Very often random uncertainties are considered, although other options [3] such as fuzzy uncertainties are also possible [4]-[8]. Second, the uncertainties are propagated through the model. Monte Carlo simulations (MCS) are still the reference method and building efficient surrogate models is an active research field. For example, polynomial chaos has been widely studied since the release of Ghanem’s book [9] on stochastic finite elements [10]-[16]. Third, a decision has to be taken on the quantities that must be derived from the outputs to design the structure. This last step is not easy and depends on the modelling of the uncertain inputs The main objective of this work is to propose a surrogate model which is able to deal with mixed uncer- tain dynamical systems: some uncertain parameters are modelled by random variables whereas others are represented by fuzzy variables. Polynomial chaos expansions (PCE) were developed for uncertainty propa- gation through random systems. However, fuzzy variables have also been described with polynomial chaos [17]-[19]. Hence we simulate an uncertain dynamical system with both random and fuzzy variables with a 4295
Transcript of Polynomial chaos expansion with fuzzy and random ...michael.friswell.com/PDF_Files/C406.pdf ·...

Polynomial chaos expansion with fuzzy and random un-certainties in dynamical systems
E. Jacquelin 1, 2, 3, M.I. Friswell 4, S. Adhikari 4, O. Dessombz 5, J.-J. Sinou 5, 6
1 Universite de Lyon, F-69622, Lyon, France.e-mail: [email protected]
2 Universite Claude Bernard Lyon 1, Villeurbanne.
3 IFSTTAR, UMR-T9406, LBMC Laboratoire de Biomecanique et Mecanique des chocs, F-69675, Bron.
4 College of Engineering, Swansea University, Swansea SA2 8PP, UK.
5 Ecole Centrale de Lyon, LTDS Laboratoire de Tribologie et Dynamique des Systemes,UMR CNRS 5513, F-69134, Ecully - France.
6 Institut Universitaire de France, 75005 Paris, France.
AbstractThis paper proposes a surrogate model which is able to deal with mixed uncertain dynamical systems: someuncertain parameters are modelled by random variables whereas others are represented by fuzzy variables.Polynomial chaos expansions (PCE) were developed for uncertainty propagation through random systems.However, fuzzy variables may also be described with polynomial chaos: in particular, Legendre polynomialsare well adapted to fuzzy variables. Hence we propose a polynomial chaos expansion, which is able todescribe an uncertain dynamical system with both random and fuzzy variables. The method is applied tosimulate an uncertain bar and the results are compared to MCS results. Thus the PCE is successfully appliedto dynamical systems with both fuzzy and random uncertainties. This study also highlights the issue of thedescription of the outputs: which quantities should be calculated to represent the behaviour of the uncertainoutputs? In the case studies, the fuzzy mean and the fuzzy standard deviation are used to describe the outputproperties.
1 Introduction
The study of uncertain systems requires three different steps. First, uncertainties must be modelled [1, 2].Very often random uncertainties are considered, although other options [3] such as fuzzy uncertainties arealso possible [4]-[8]. Second, the uncertainties are propagated through the model. Monte Carlo simulations(MCS) are still the reference method and building efficient surrogate models is an active research field. Forexample, polynomial chaos has been widely studied since the release of Ghanem’s book [9] on stochasticfinite elements [10]-[16]. Third, a decision has to be taken on the quantities that must be derived from theoutputs to design the structure. This last step is not easy and depends on the modelling of the uncertain inputs
The main objective of this work is to propose a surrogate model which is able to deal with mixed uncer-tain dynamical systems: some uncertain parameters are modelled by random variables whereas others arerepresented by fuzzy variables. Polynomial chaos expansions (PCE) were developed for uncertainty propa-gation through random systems. However, fuzzy variables have also been described with polynomial chaos[17]-[19]. Hence we simulate an uncertain dynamical system with both random and fuzzy variables with a
4295

polynomial chaos expansion.
This paper is organized as follows: first the uncertainties are described; then, the response obtained from apolynomial chaos expansion is presented; finally, the method is applied to an uncertain bar modelled withthe finite element method.
2 Uncertain dynamical system
2.1 Uncertain motion equation
A dynamical system described by a finite element model is addressed in this study. This system is definedwith mass, damping and stiffness matrices.
Consider a bounded solid domainD with boundary ∂D excited by a dynamic load. The mass operator, as wellas the damping and the stiffness operators, are assumed to be uncertain. D is divided intom non-overlappingsubdomains: in each subdomain, each uncertain parameter is described uniquely. So, for example, in subdo-main Dk an uncertain parameter is either a fuzzy variable or a random variable.
The response to a system of loads is derived through a finite element approximation of the domain: eachsubdomain is discretized and the matrices (mass, damping and, stiffness) are evaluated. Then the globalmatrices are obtained by the assembly procedure and the response is governed by
M x(t) + D x(t) + K x(t) = F(t) (1)
where M, D and, K are the uncertain mass, damping and stiffness matrices, x(t) is the degree of freedomvector and F is the force vector. Matrices M, D and, K depend on the kind of uncertainties related to thesystem.
Let A denote an uncertain matrix that may be M, D or K. In the following, A is assumed to be given bythe expansion
A = A(A) = A0 +r∑i=1
ai Ai (2)
where A = (a1, · · · , ar) gathers all the uncertain parameters ai, which are supposed to be independent.Further ai may be modelled differently than aj for j 6= i: for example, ai may be a random variable,whereas aj may be a fuzzy variable. Let ARV (resp. AFV ) the subset of A that gathers the random (resp.fuzzy) uncertainties.
2.2 Random variables
ARV is a zero-mean random vector: each element is described with a probability density function (pdf).The main difficulty is to define the more appropriate pdf to a random uncertainty. This may be done whenexperimental measurements exist [11], which is not always the case: so the lack of relevant information leadsto assumptions. Gaussian random variables are often chosen to model a random uncertainty. However, someother distributions may be used, such as the uniform distribution or the lognormal distribution. Both normaland uniform distributions will be addressed in this paper.
The ultimate objective of the propagation of random uncertainties is to derive the pdf of the random vectorx(t). In this paper, the first two moments (mean and standard deviation) of the response will be calculatedfor each time t, or for each frequency ω if the study is in the frequency domain instead of the time domain.
In the following, ”standard” deviates ξi will be used instead of ai. In case of a normal distribution a zero-mean normal variate with variance equal to unity is used; in case of a uniform distribution, a standard uniformdeviate, which is defined over [−1, 1], is used. Then, in both cases, the response of the uncertain system,x(t), depends on ΞRV = (ξ1, · · · , ξrRV ) (rRV ≤ r).
4296 PROCEEDINGS OF ISMA2016 INCLUDING USD2016

The random uncertainty may be propagated by estimating the response with a polynomial chaos expansion:the choice of the polynomial chaos depends on the statistical law of the related random variables: for exampleHermite polynomials (resp. Legendre) are chosen when the random variable is a normal (resp. uniform)deviate [13]. In the following the probability density function (pdf) of ξi is denoted pi(ξi).
2.3 Fuzzy variables
Fuzzy variables are used when the information on the uncertain parameters is given in terms of intervals thatreflect the possible values of these parameters [5]. Fuzzy variables are related to fuzzy sets F , defined by aset F and its membership function, µF , defined as
µF : E → [0, 1]
x 7→ µF (x)
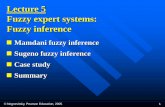
where E is the set of definition of the fuzzy variable and F ⊂ E. The concept of fuzzy sets was introductedby Zadeh [4] who interpreted the membership function as the degree of possibility for a variable to belong toF (i.e. the degree of membership of x in F). If µF (x) = 0 then x does not belong to F , whereas µF (x) = 1indicates that x belongs to F . When 0 < µF (x) < 1 then it is possible that x belongs to F and the degreeof membership varies from weak to strong as µF (x) varies from 0 to 1 (see Fig. 1). An α-cut is defined by
Fα = {x ∈ E | µF (x) ≥ α} for 0 < α ≤ 1
In the context of Eq. (2) and for a given α-cut, a(α)i is an uncertain variable whose values are within an
interval a(α)i = [a
(α)mi , a
(α)Mi ], and A
(α)i is the related matrix. For simplicity a standard fuzzy variable ξi
will be introduced by connecting each interval a(α)i to the interval [−1, 1] (see Fig. 1)
a(α)i : [−1, 1] → [a
(α)mi , a
(α)Mi ]
ξi 7→ a(α)i (ξi) =
(a
(α)Mi − a(α)m
i
2
)ξi +
(a
(α)Mi + a
(α)mi
2
)
Then x(α)(t), the response of the uncertain system associated with a given α-cut, depends on ΞFV =(ξ1, · · · , ξrFV ) ∈ [−1, 1]rFV (rFV ≤ r).
In the following, the membership function is supposed to be linear between (a(0)mi , 0) and (ai crisp, 1), and
between (ai crisp, 1) and (a(0)Mi , 0), as indicated in Fig. 1. Also, all of the uncertain matrices are assumed
to be associated with a given α-cut, and then each matrix A should be denoted A(α). For simplicity, thesuperscript (α) will be dropped when it is not necessary.
In a fuzzy uncertainty propagation context, the objective is to provide the interval Iα whose bounds corre-spond to the minimum and the maximum of the response for all the α-cuts. So, for each α-cut and for eachtime t (or frequency ω for a study in the frequency domain), the extrema of the solution of Eq. (1) must becalculated over all values that belong to the α-cut of the fuzzy variables: they are the bounds of Iα.
The response of a fuzzy uncertain system may be given in terms of an orthogonal polynomial set. Indeed, asfuzzy variable ξi is described over the interval [−1, 1], the use of Legendre polynomials is relevant. Then,even when the system is fuzzy, the response may be given in terms of a polynomial chaos expansion.
USD - NON-PROBABILISTIC METHODS 4297

Figure 1: A membership function and the related standard fuzzy variable description
3 Uncertain response
3.1 PC-equation
Whatever the kind of uncertainty (random and/or fuzzy), the uncertain response vector is expanded in termsof polynomials ΨJ , which are r-dimensional generalized polynomial chaoses, as
x(t) =+∞∑J=0
YJ(t) ΨJ(Ξ) (3)
where {YJ(t)} are the PC-components of x(t). This expansion is common for random responses, but notfor the case of fuzzy variables.
An approximation is obtained by truncating the infinite series as
xP(t) =P∑J=0
YJ(t) ΨJ(Ξ) (4)
P and twill be dropped to shorten the equations. The multivariate polynomial chaoses used here are based onorthonormalized single variate polynomial chaoses ψj(ξi) of degreemj . Ifm denotes the degree of the PCEgiven by Eq (4), then the number of polymonial chaoses used in expansion (4) is P + 1 = (m+ r)!/(m! r!).
Substituting x defined by expression (4) into Eq. (1) gives
P∑J=0
ΨJ(Ξ)(MYJ + DYJ + KYJ
)= F (5)
Projecting Eq. (5) on each ΨI gives the equations satisfied by the components of the PCE [20]
M Y(t) + D Y(t) + K Y(t) = F(t) (6)
where
Ck ∈ IR(P+1)×(P+1), with [Ck]IJ =
∫Dξ1· · ·∫Dξr
ξkΨI(Ξ)ΨJ(Ξ)r∏j=1
pj(ξj) dξj (7)
4298 PROCEEDINGS OF ISMA2016 INCLUDING USD2016

M =r∑
k=0
Ck ⊗Mk ∈ IRn(P+1)×n(P+1) (8)
D =r∑
k=0
Ck ⊗Dk ∈ IRn(P+1)×n(P+1) (9)
K =r∑
k=0
Ck ⊗Kk ∈ IRn(P+1)×n(P+1) (10)
Y = [YT0 YT
1 · · · YTP ]T ∈ IRn(P+1) (11)
F(t) = [FT (t) 0 0 · · · 0 ]T ∈ IRn(P+1) (12)
and ⊗ denotes the Kronecker product, (•)T denotes the transpose of (•) and n is the number of degrees offreedom of the dynamical system. Function pj(ξj) ≡ 1 when ξj is a fuzzy variable.
Hence, the PC-components are the solution of an n(P + 1) degrees of freedom (dofs) dynamical system thatwill be referred to as the PC-system. Accordingly the PCE transforms the study of an uncertain dynamicalsystem to the study of a deterministic dynamical system. Hence the PC-system has resonant frequencies andthe random/fuzzy steady-state response characteristics to a harmonic force will show peaks related to thesespurious resonances: the latter are referred to as PC-resonances [20].
3.2 Uncertain response
As the fuzzy uncertainties are described with Legendre polynomials, the PCE components are derived exactlyas if the fuzzy variables were uniform random variates.
Once Eq. (6) is solved, the response x is obtained from Eq. (4) by evaluating the PC for a given set ofuncertain parameters. It is then possible to collect a large amount of information on the response. However,especially in case of mixed uncertainties, the main issue is to identify those quantities that be extracted fromthese data: this is the step where the fuzzy and random variables are treated differently. The analysis of theresponse is not obvious and often depends on the problem that must be solved. In this study, as an example,the α-cut of the first two statistical moments will be determined: that is the α-intervals of the mean and thestandard deviation.
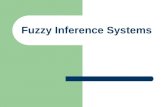
4 Bar with uncertain stiffness
This example is similar to the one given in [17], and the system is shown in Fig. 2. The quantityEA = E×A(E: Young’s modulus; A: cross-section area) is assumed to be uncertain. In fact, the bar is divided in twoparts and EA1 (resp. EA2) is constant along part 1 (resp. part 2) but uncertain. The bar is modelled witha finite element model. L1 and n1 (resp. L2 and n2) are the length and the number of elements of part 1(resp. part 2). A constant modal damping ratio of 0.3 % is assumed for all of the vibration modes of thedeterministic part of the system, defined with matrices M0 and K0 (see Eq. (2)). As proposed in [17], themass per unit length is set such that the first “deterministic” natural frequency is 1 rad/s.
The bar is excited by a harmonic force, F0 exp(iωt) located at the end of the bar. The required frequencyresponse is the displacement at the end of the bar as a function of the load frequency (101 frequencies in theinterval [0 20] rad/s).
EA1 is supposed to be a fuzzy variable and includes uncertainties on EA as well as uncertainties from theboundary condition (the end is not perfectly clamped).
min(EA(α)1 ) = EA
(0)m1 + (EA1 crisp − EA(0)m
1 )α (13)
max(EA(α)1 ) = EA
(0)M1 + (EA1 crisp − EA(0)M
1 )α (14)
USD - NON-PROBABILISTIC METHODS 4299

Figure 2: Uncertain bar
fuzzy parameters random parametersnormal pdf uniform pdf
EA(0)m1 EA
(0)M1 EA1 crisp mean st. dev. min(EA2) max(EA2)
EAm1 EAM1 δk1 × (EAm1 + EAM1 )/2 (EAm2 + EAM2 )/2 δk2× mean EAm2 EAM2
Table 1: Bar: uncertain parameters in each configuration
EA2 is modelled by a random variable: both uniform and normal laws were addressed. The characteristicsof the uncertain system are listed in Tables 1 and 2: they are adjusted so that both random distributions havethe same mean and standard deviation.
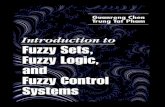
The variability (i.e. the interval) of the response mean is evaluated and plotted in Figs. 3 and 4: the resultsare calculated with the PC approach (PC of degree 20) and with Monte Carlo simulations (MCS) for fourα-cuts. Figure 3 corresponds to the case of a normal random deviate whereas Fig. 4 corresponds to a uniformdeviate. In the former (resp. latter) case the random part of the response is described with Hermite (resp.Legendre) polynomials. More precisely, nRV samples of EA2 are drawn with a Latin Hypercube sampling(LHS) technique. nFV equally spaced points are evaluated from each α-cut. Then, for each of the nFVpoints, the mean of the nRV responses is calculated: the extrema of the nFV means give the bounds of theα-cut response and are plotted in Figs. 3 and 4.
The results obtained from both the PCE and the MCS approaches are in excellent agreement despite the lowmodal damping ratio. It can be noticed that the agreement is almost perfect when the random variable isuniform and hence Legendre polynomials are used: it has been already remarked that the convergence isfaster with Legendre polynomials compared to Hermite polynomials [21].
Similar results are observed for the variability of the standard deviation, as shown in Figs. 5 and 6.
5 Conclusion
A unified processing of two kinds of uncertainty is proposed through polynomial chaos expansion. Indeed, asa fuzzy variable is described over an interval, Legendre polynomials are suitable for describing the fuzzy partof the response. Then the PC coefficients satisfy equations which don’t depend on the nature of uncertaintiesbut depend on the polynomial chaos used to describe the response. On the contrary the post-processing ofthe PC expansion depends on the nature of the uncertainty: an optimization problem (search for extrema) issolved for the fuzzy variables whereas the statistical moments are derived for the random variables.
More details and examples on this study can be found in [22].
EAm1 (MN) EAM1 (MN) EAm2 (MN) EAM2 (MN) L1 (m) L2 (m)180 260 40 60 0.5 1.5δk1 δk2 (%) F0 (kN) n1 n2
0.91 (EAM2 − EAm2 )/(2√
3) 1 2 6
Table 2: Bar characteristics
4300 PROCEEDINGS OF ISMA2016 INCLUDING USD2016

(a) α = 0 (b) α = 0.25
(c) α = 0.5 (d) α = 0.75
Figure 3: Variability of the mean of the frequency response at the end point of the rod; EA1: fuzzy variable;EA2: normal random variate; shadow area: MCS; dashed lines: bounds of the interval computed with thePC approach (degree=20); damping ratio: 0.3 %; response for four α-cuts.
USD - NON-PROBABILISTIC METHODS 4301

(a) α = 0 (b) α = 0.25
(c) α = 0.5 (d) α = 0.75
Figure 4: Variability of the mean of the frequency response at the end point of the rod; EA1: fuzzy variable;EA2: uniform random variate; shadow area: MCS; dashed lines: bounds of the interval computed with thePC approach (degree=20); damping ratio: 0.3 %; response for four α-cuts.
4302 PROCEEDINGS OF ISMA2016 INCLUDING USD2016

(a) α = 0 (b) α = 0.25
(c) α = 0.5 (d) α = 0.75
Figure 5: Variability of the standard deviation of the frequency response at the end point of the rod; EA1:fuzzy variable; EA2: normal random variate; shadow area: MCS; dashed lines: bounds of the intervalcomputed with the PC approach (degree=20); damping ratio: 0.3 %; response for four α-cuts.
USD - NON-PROBABILISTIC METHODS 4303

(a) α = 0 (b) α = 0.25
(c) α = 0.5 (d) α = 0.75
Figure 6: Variability of the standard deviation of the frequency response at the end point of the rod; EA1:fuzzy variable; EA2: uniform random variate; shadow area: MCS; dashed lines: bounds of the intervalcomputed with the PC approach (degree=20); damping ratio: 0.3 %; response for four α-cuts.
4304 PROCEEDINGS OF ISMA2016 INCLUDING USD2016

Acknowledgements
J-J. Sinou acknowledges the support of the Institut Universitaire de France.
References
[1] K. Sepahvand, S. Marburg, On construction of uncertain material parameter using generalized polyno-mial chaos expansion from experimental data, Procedia IUTAM 6 (2013), pp. 4–17.
[2] K. Sepahvand, S. Marburg, Identification of composite uncertain material parameters from experimentalmodal data, Probabilistic Engineering Mechanics 37 (2014), pp. 148–153.
[3] S. Beer, M.and Ferson, V. Kreinovich, Imprecise probabilities in engineering analyses, MechanicalSystems and Signal Processing 37 (1-2) (2013), pp. 4–29.
[4] L. A. Zadeh, Fuzzy sets, Information and Control (1965), pp. 338–353.
[5] M. Hanss, Applied fuzzy arithmetic: An introduction with Engineerng Applications, Springer, 2010.
[6] H. De Gersem, D. Moens, W. Desmet, D. Vandepitte, A fuzzy finite element procedure for the calculationof uncertain frequency response functions of damped structures: Part 2, numerical case studies, Journalof Sound and Vibration 288 (2005), pp. 463–486.
[7] D. Moens, D. Vandepitte, A fuzzy finite element procedure for the calculation of uncertain frequency-response functions of damped structures: Part 1, procedure, Journal of Sound and Vibration 288 (2005),pp. 431–462.
[8] D. Moens, D. Vandepitte, A survey of non-probabilistic uncertainty treatment in finite element analysis,Comput. Methods Appl. Mech. Engrg. 194 (2005), pp. 1527–1555.
[9] R. Ghanen, D. Spanos, Stochastic Finite Elements: A Spectral Approach, Springer-Verlag, New York,USA, 1991.
[10] G. I. Schueller, H. J. Pradlwarter, Uncertainty analysis of complex structural systems, InternationalJournal for Numerical Methods in Engineering 80 (6-7, Sp. Iss. SI) (2009), pp. 881–913.
[11] G. Stefanou, The stochastic finite element method: Past, present and future, Computer Methods inApplied Mechanics and Engineering 198 (2009), pp. 1031–1051.
[12] B. Sudret, A. Der Kiureghian, Tech. Rep. UCB/SEMM-2000/08, University of Berkeley (2000).
[13] D. Xiu, G. E. Karniadakis, The Wiener-Askey polynomial chaos for stochastic differential equations,SIAM Journal on Scientific Computing 24(2) (2002), pp. 614–644.
[14] D. Xiu, G. E. Karniadakis, Modeling uncertainty in flow simulations via generalized polynomial chaos,Journal of computational physics 187(1) (2003), pp. 137–167.
[15] G. Blatman, B. Sudret, Use of sparse polynomial chaos expansions in adaptive stochastic finite elementanalysis, Prob. Eng. Mech. 25 (2010), pp. 183–197.
[16] G. Blatman, B. Sudret, Adaptive sparse polynomial chaos expansion based on least angle regression,Journal of Computational Physics 230 (2011), pp. 2345–2367.
[17] S. Adhikari, A spectral projection approach for fuzzy uncertainty propagation in structural dynamics,Uncertainty in Structural Dynamics Conference - USD2012, Leuven, Belgium (2012), pp. 4745–4759.
USD - NON-PROBABILISTIC METHODS 4305

[18] S. Adhikari, H. Haddad Khodaparast, A spectral approach for fuzzy uncertainty propagation in finiteelement analysis, Fuzzy sets and systems 243 (2014), pp. 1–24.
[19] A. Monti, F. Ponci, M. Valtorta, Extending polynomial chaos to include interval analysis, IEEE Trans-actions on Instrumentation and Measurement 59 (1) (2010), pp. 48–55.
[20] E. Jacquelin, S. Adhikari, J.-J. Sinou, M. I. Friswell, The polynomial chaos expansion and the steady-state response of a class of random dynamic systems, Journal of Engineering Mechanics 141(4) (2015),04014145.
[21] E. Jacquelin, S. Adhikari, M. I. Friswell, and J.-J. Sinou, Role of Roots of Orthogonal Polynomials inthe Dynamic Response of Stochastic Systems, Journal of Engineering Mechanics, Online Publication 28March 2016.
[22] E. Jacquelin, M. I. Friswell, S. Adhikari, O. Dessombz, J.-J. Sinou. Polynomial chaos expansion withrandom and fuzzy variables, Mechanical Systems and Signal Processing, vol. 75, pp 41-56, 2016.
4306 PROCEEDINGS OF ISMA2016 INCLUDING USD2016