Polymer Processing Laboratory University of Maryland Physics Based Modeling and Control of Extrusion...
22
Polymer Processing Laboratory University of Maryland Physics Based Modeling and Control of Extrusion Paul Elkouss David Bigio
-
Upload
florence-allen -
Category
Documents
-
view
216 -
download
2
Transcript of Polymer Processing Laboratory University of Maryland Physics Based Modeling and Control of Extrusion...

Polymer Processing Laboratory University of Maryland
Physics Based Modeling and Control of Extrusion
Paul Elkouss
David Bigio

Polymer Processing Laboratory University of Maryland
Motivation• Control extrudate quality – anything that can be
measured online• Use a physically based model• Closed loop control using kinematic and additional
plant models to regulate the product qualities• Example vis-breaking of polypropylene:
– Vis-breaking = cutting of polymer chain– MWD influences product properties – Control product properties: Viscosity, Yield strength, etc.– Peroxide has very high control influence

Polymer Processing Laboratory University of Maryland
Experimental Approach
Polymer
Optical Analysis S
D
Mixing Section
Probe DAQ/PC
ch
gap
cl
ap

Polymer Processing Laboratory University of Maryland
Experimental System

Polymer Processing Laboratory University of Maryland
Research Diagram

Polymer Processing Laboratory University of Maryland
Background – Summary• Simple and Complex models of extruder behavior• Different models of peroxide degradation, but most are
based on work by Tzoganakis• FEM has been used to model degradation in the extruder
(computationally intensive), but none have used lamellar modeling yet.
• Most open loop model structures have been determined statistically (arbitrary), but Walsh et. al. are first to use model based on kinematics.

Polymer Processing Laboratory University of Maryland
3rd Order Plant Model
3
3
)()(
aseasG
std
•Like 3 CSTR’s with transport delay
•Model fits for each probe
•Deconvolve signals to get fits for individual probes

Polymer Processing Laboratory University of Maryland
RTD’s and Model Fits

Polymer Processing Laboratory University of Maryland
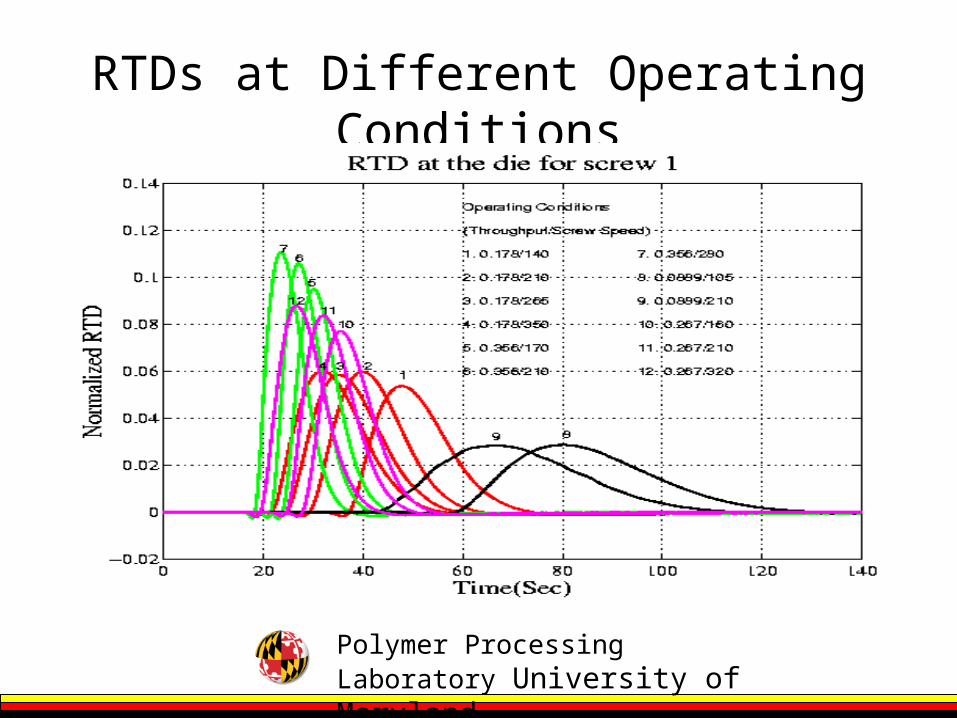
Mean Residence Measures
N
QBAQtm
BQ
NANtm
• Mean Residence Volume
• Mean Residence Revolution
Polymer Processing Laboratory University of Maryland
RTDs at Different Operating Conditions

Polymer Processing Laboratory University of Maryland
Model Validation

Polymer Processing Laboratory University of Maryland
Other Kinematic Representations
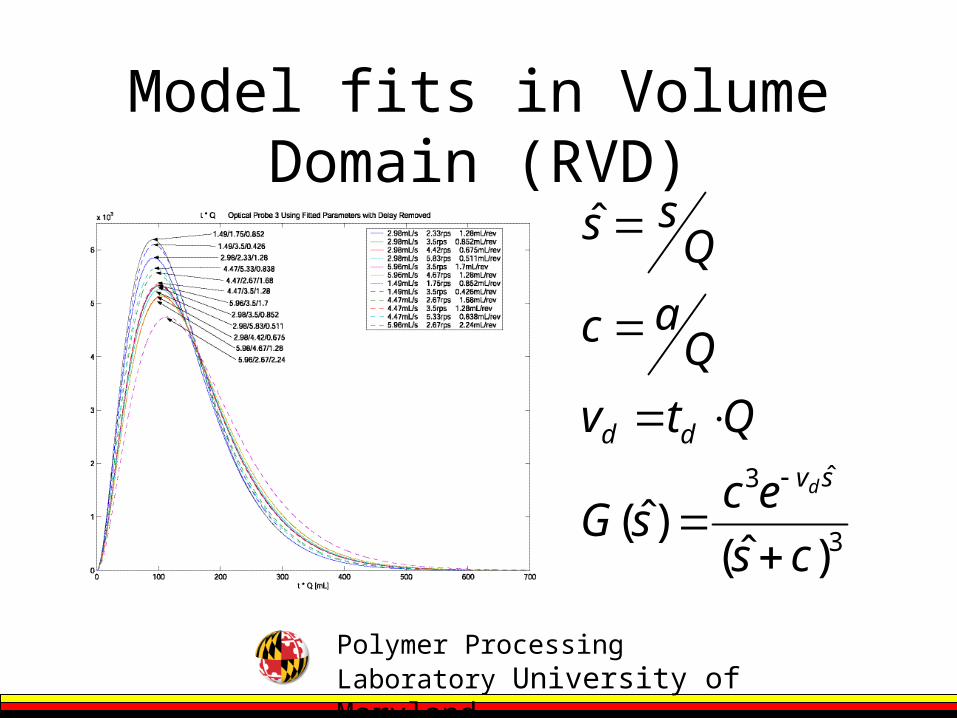
• RRD - Residence Rotation Distribution– The same specific throughput (Q/N) gives the
same curve.
• RVD – Residence Volume Distribution– The curves w/o volume delay collapse to one
curve– One set of shape parameters describes all
conditions

Polymer Processing Laboratory University of Maryland
RRD
Polymer Processing Laboratory University of Maryland
Model fits in Volume Domain (RVD)
3
ˆ3
)ˆ()ˆ(
ˆ
cs
ecsG
Qtv
Qac
Qss
sv
dd
d

Polymer Processing Laboratory University of Maryland
3rd Order with Different Poles
))()(()(
321
)(321
123
321
asasas
eaaasG
sttt ddd
•Like 3 CSTR’s of different volumes with transport delay

Polymer Processing Laboratory University of Maryland
• An important question: What frequency disturbances can be damped by mixing process given the screw geometry?
Disturbance Rejection
filledcritical V
2
3
3
)()(
Cs
eCKsG
svC
d
2/13/2 )1(
2
filledVC
Polymer Processing Laboratory University of Maryland
Lamellar Model• One dimensional model of material transfer (Ottino et.
al.)
• Useful for studying laminar mixing, diffusion and reaction
• Three dimensional flows one dimension.
• Example - simplified calculations.– Relate to operating conditions– Calculate diffusion and inter-material area growth– No need to calculate reaction, or geometry

Polymer Processing Laboratory University of Maryland
Background – Lamellar Model(x)= Vx=-x
iii RNt
c
*2
2
iR
t
tc
t
tc
r
ci
d
ci
2
12ln ctt
tesx 0

Polymer Processing Laboratory University of Maryland
System ID
• For determining open-loop kinematic model of plant
• Determine volume delay, and shape factor for sensor
dttatta
ttad
tt
aaaaa
e
aaaaa
eaaaaaaaa
e
aaa
tt
tcdd
d
))(())((
)(1
0
)(
13121
)(
12232
)(
233132213
)(
321 12
3

Polymer Processing Laboratory University of Maryland
Closed Loop Control Issues
• Modeling the Plant
• Online property measurement– What to measure– Measurement delay
• Control Scheme– Simple, smith predictor– Advanced control: Robust, Adaptive control– Online parameter correction
Polymer Processing Laboratory University of Maryland
What is currently being done
• Warp time model– Compare to steady state results– Relate to operating conditions to predict the DC
Gain
• Control Scheme– Apply adaptive control to the plant– Verify with Experiments

Polymer Processing Laboratory University of Maryland
Conclusions
• Kinematic model is main model for the extruder
• The model is applicable to many different measurable quantities
• Additional models can be added to provide better control