Plane Sweep - cglab.cacglab.ca/~morin/teaching/2402/notes/planesweep.pdf · Pat Morin COMP2402/2002...
89
Plane Sweep Pat Morin COMP2402/2002 Carleton University Pat Morin COMP2402/2002 Plane Sweep
Transcript of Plane Sweep - cglab.cacglab.ca/~morin/teaching/2402/notes/planesweep.pdf · Pat Morin COMP2402/2002...
Plane Sweep
Pat MorinCOMP2402/2002
Carleton University
Pat Morin COMP2402/2002 Plane Sweep
Line Segment Intersection Finding
I Input: Given a set S of n line segments
I Output: All pairs s, t ∈ S such that s intersects t
Pat Morin COMP2402/2002 Plane Sweep
Line Segment Intersection Finding
I Input: Given a set S of n line segments
I Output: All pairs s, t ∈ S such that s intersects t
Pat Morin COMP2402/2002 Plane Sweep
The Trivial Algorithm
I The trivial algorithm:
1. for each s, t ∈(S2
)I if s intersects t then add (s, t) to the output
I Running time is proportional to(n2
)= n(n − 1)/2 = O(n2)
I Can we do better?
I In the worst case, no, every pair in S might intersect
I Then the size of the output is(n2
)= Ω(n2)
Pat Morin COMP2402/2002 Plane Sweep
The Trivial Algorithm
I The trivial algorithm:
1. for each s, t ∈(S2
)I if s intersects t then add (s, t) to the output
I Running time is proportional to(n2
)= n(n − 1)/2 = O(n2)
I Can we do better?
I In the worst case, no, every pair in S might intersect
I Then the size of the output is(n2
)= Ω(n2)
Pat Morin COMP2402/2002 Plane Sweep
The Trivial Algorithm
I The trivial algorithm:
1. for each s, t ∈(S2
)I if s intersects t then add (s, t) to the output
I Running time is proportional to(n2
)= n(n − 1)/2 = O(n2)
I Can we do better?
I In the worst case, no, every pair in S might intersect
I Then the size of the output is(n2
)= Ω(n2)
Pat Morin COMP2402/2002 Plane Sweep
The Trivial Algorithm
I The trivial algorithm:
1. for each s, t ∈(S2
)I if s intersects t then add (s, t) to the output
I Running time is proportional to(n2
)= n(n − 1)/2 = O(n2)
I Can we do better?
I In the worst case, no, every pair in S might intersect
I Then the size of the output is(n2
)= Ω(n2)
Pat Morin COMP2402/2002 Plane Sweep
The Trivial Algorithm
I The trivial algorithm:
1. for each s, t ∈(S2
)I if s intersects t then add (s, t) to the output
I Running time is proportional to(n2
)= n(n − 1)/2 = O(n2)
I Can we do better?
I In the worst case, no, every pair in S might intersect
I Then the size of the output is(n2
)= Ω(n2)
Pat Morin COMP2402/2002 Plane Sweep
Output-Sensitive Algorithms
I The Ω(n2) lower-bound on the size of the output isunsatisfactory
I In many cases, the number of intersecting pairs is muchsmaller than
(n2
)I An output-sensitive algorithm is an algorithm whose
running-time is sensitive to the number, k , of intersectingpairs
I The Bently-Ottman plane-sweep algorithm runs in timeO((n + k) log n) where k is the number of intersecting pairs ofsegments
I This is much faster when k (n2
)
Pat Morin COMP2402/2002 Plane Sweep
Output-Sensitive Algorithms
I The Ω(n2) lower-bound on the size of the output isunsatisfactory
I In many cases, the number of intersecting pairs is muchsmaller than
(n2
)
I An output-sensitive algorithm is an algorithm whoserunning-time is sensitive to the number, k , of intersectingpairs
I The Bently-Ottman plane-sweep algorithm runs in timeO((n + k) log n) where k is the number of intersecting pairs ofsegments
I This is much faster when k (n2
)
Pat Morin COMP2402/2002 Plane Sweep
Output-Sensitive Algorithms
I The Ω(n2) lower-bound on the size of the output isunsatisfactory
I In many cases, the number of intersecting pairs is muchsmaller than
(n2
)I An output-sensitive algorithm is an algorithm whose
running-time is sensitive to the number, k , of intersectingpairs
I The Bently-Ottman plane-sweep algorithm runs in timeO((n + k) log n) where k is the number of intersecting pairs ofsegments
I This is much faster when k (n2
)
Pat Morin COMP2402/2002 Plane Sweep
Output-Sensitive Algorithms
I The Ω(n2) lower-bound on the size of the output isunsatisfactory
I In many cases, the number of intersecting pairs is muchsmaller than
(n2
)I An output-sensitive algorithm is an algorithm whose
running-time is sensitive to the number, k , of intersectingpairs
I The Bently-Ottman plane-sweep algorithm runs in timeO((n + k) log n) where k is the number of intersecting pairs ofsegments
I This is much faster when k (n2
)
Pat Morin COMP2402/2002 Plane Sweep
Output-Sensitive Algorithms
I The Ω(n2) lower-bound on the size of the output isunsatisfactory
I In many cases, the number of intersecting pairs is muchsmaller than
(n2
)I An output-sensitive algorithm is an algorithm whose
running-time is sensitive to the number, k , of intersectingpairs
I The Bently-Ottman plane-sweep algorithm runs in timeO((n + k) log n) where k is the number of intersecting pairs ofsegments
I This is much faster when k (n2
)
Pat Morin COMP2402/2002 Plane Sweep
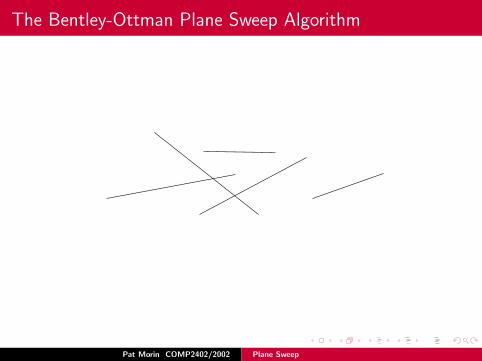
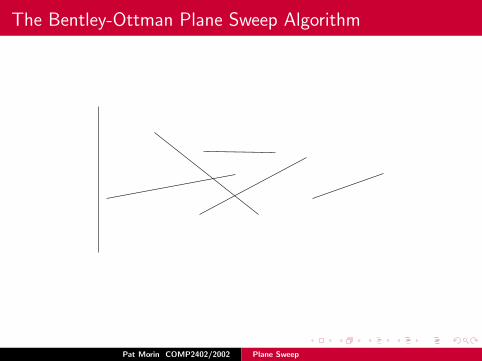
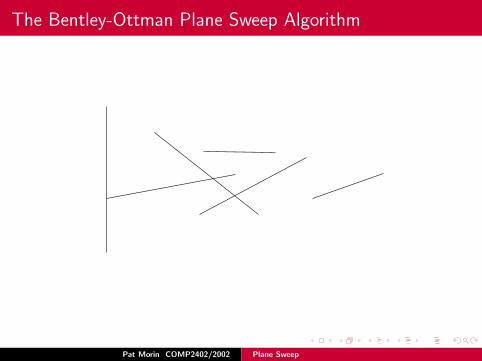
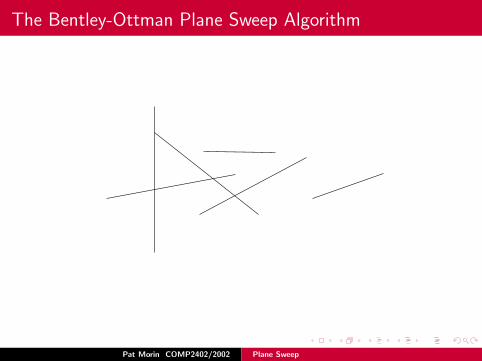
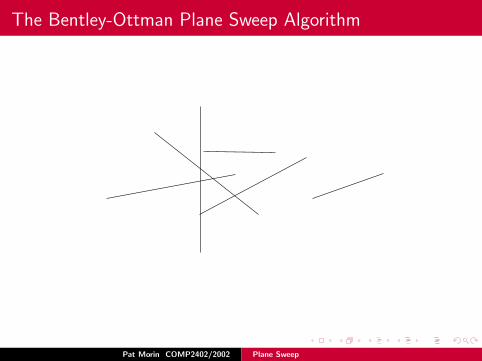
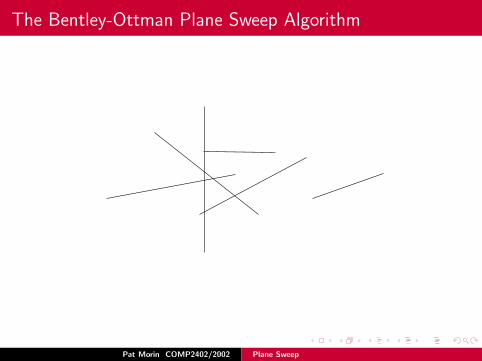
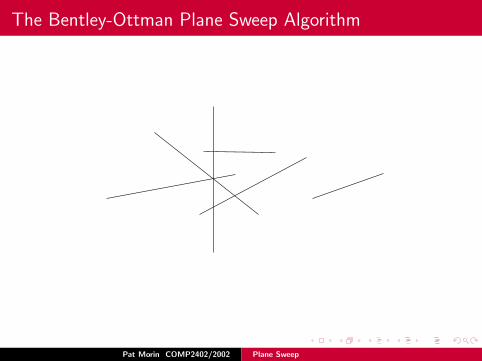
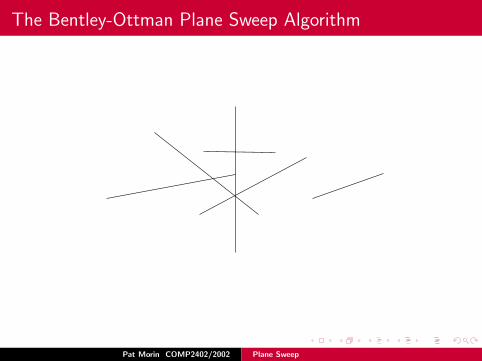
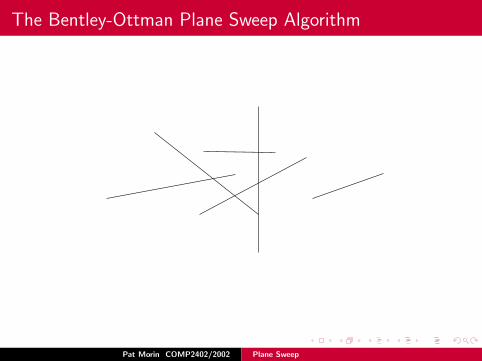
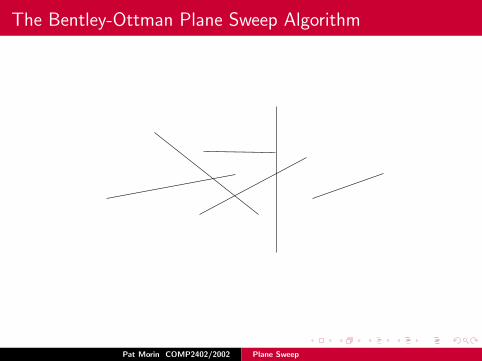
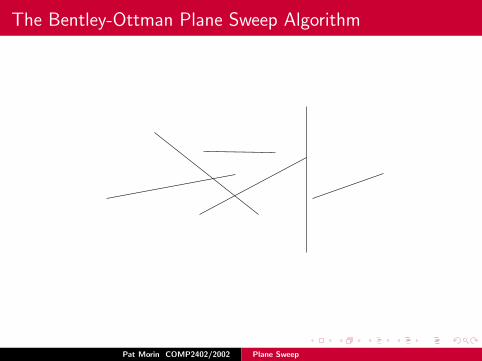
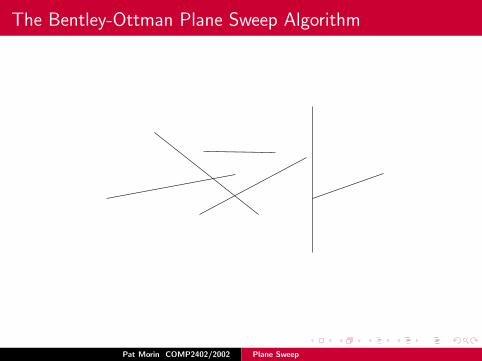
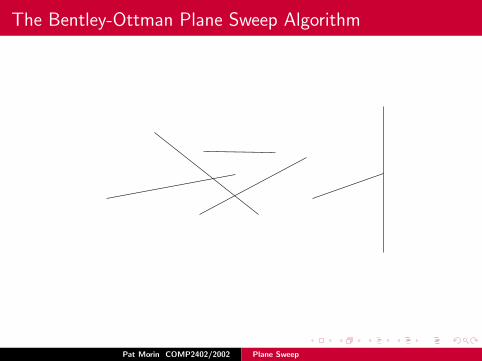
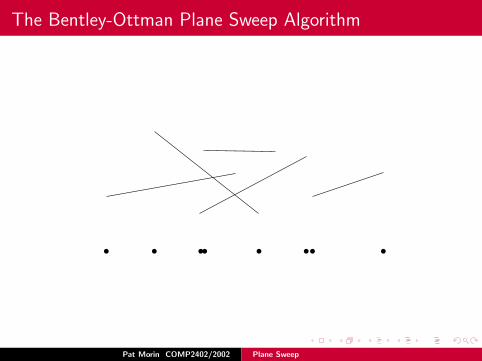
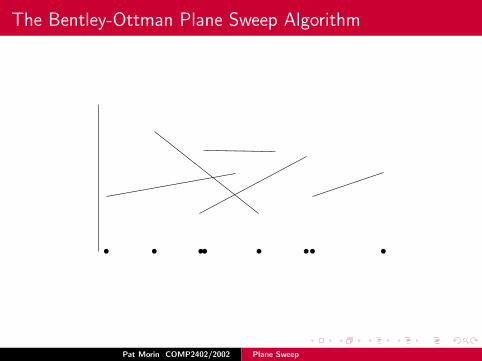
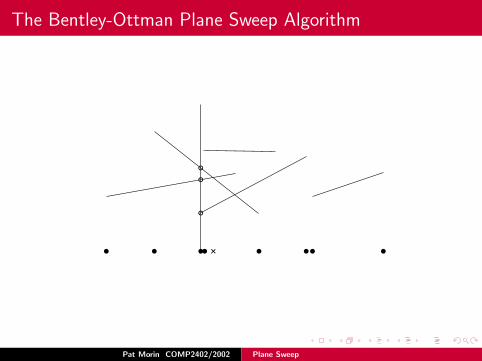
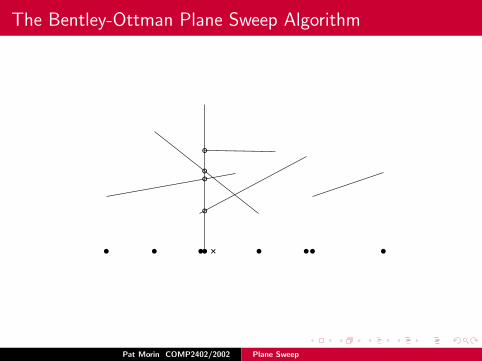
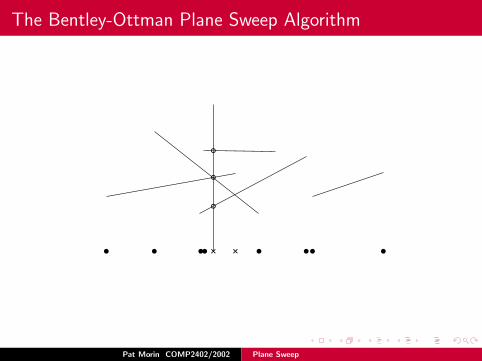
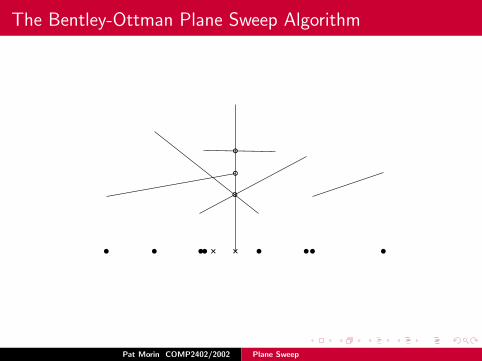
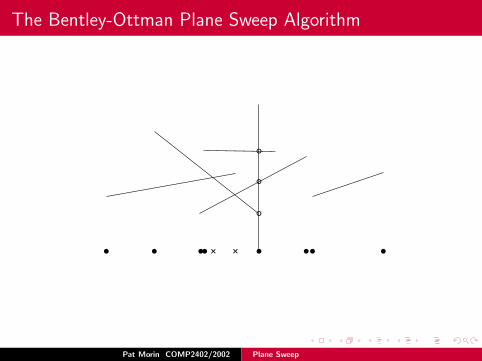
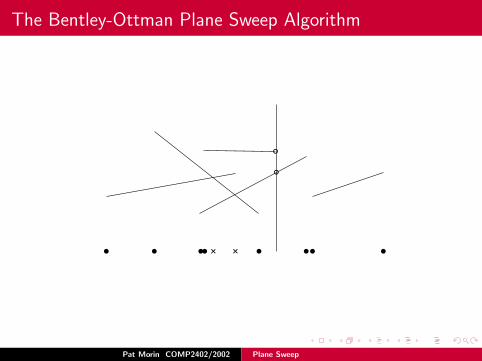
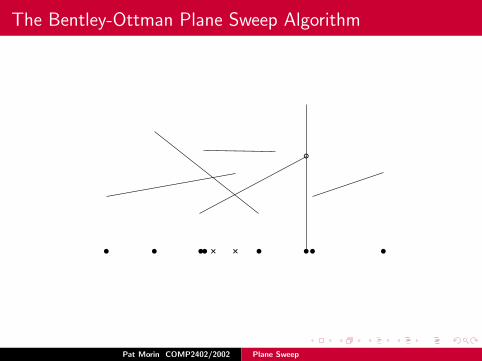
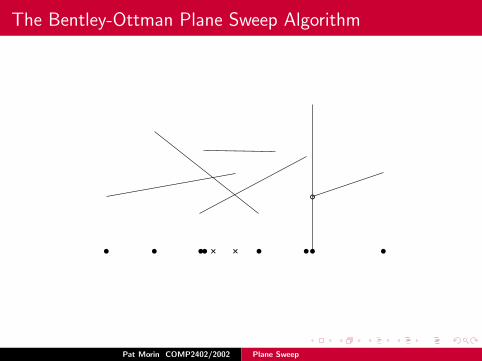
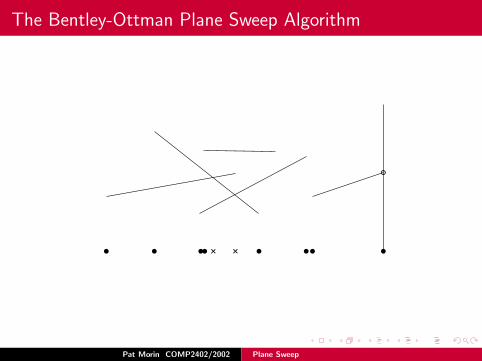
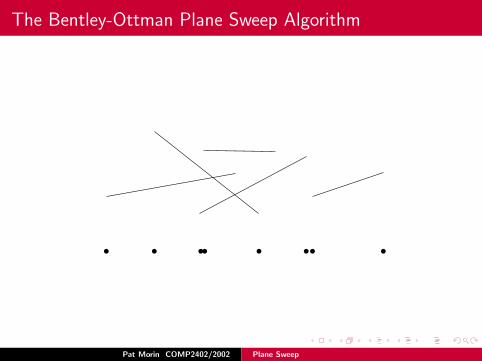
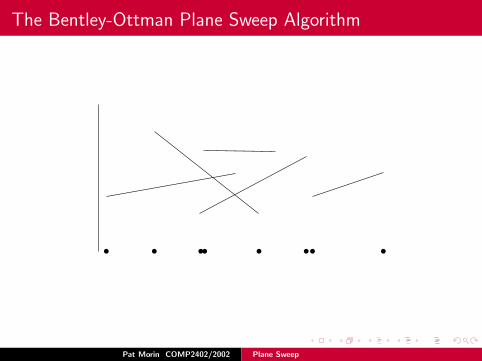
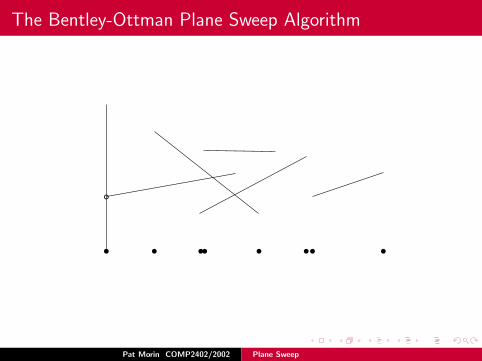
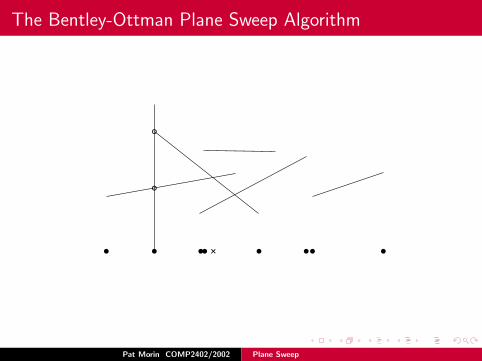
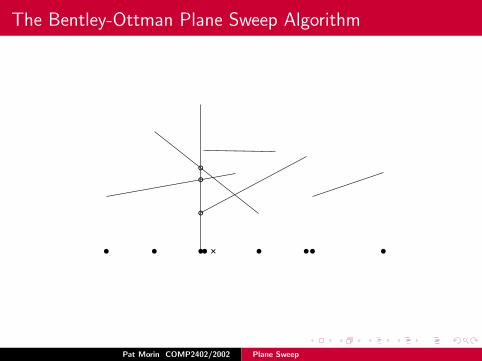
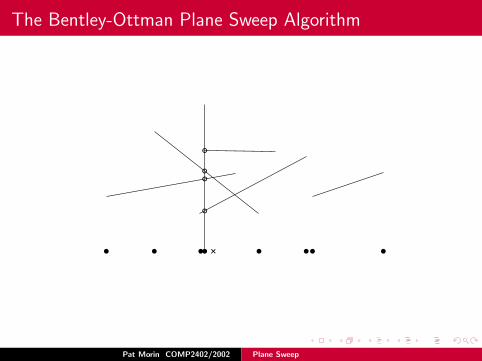
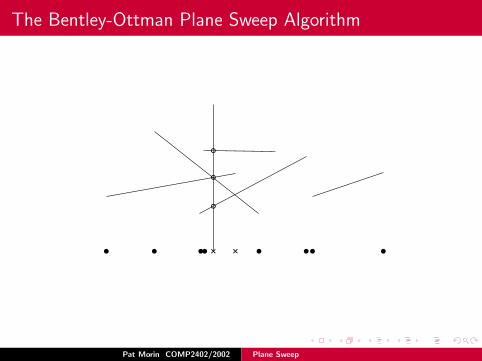
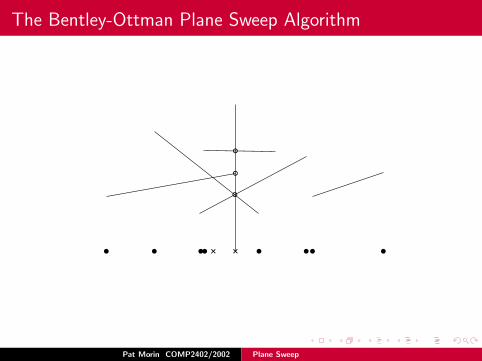
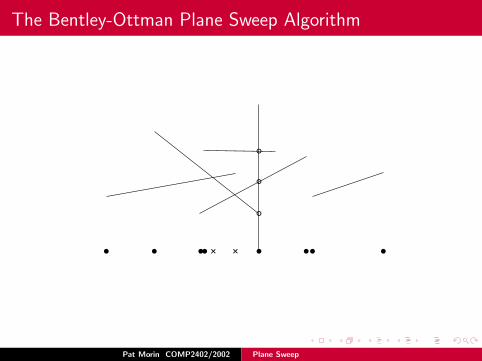
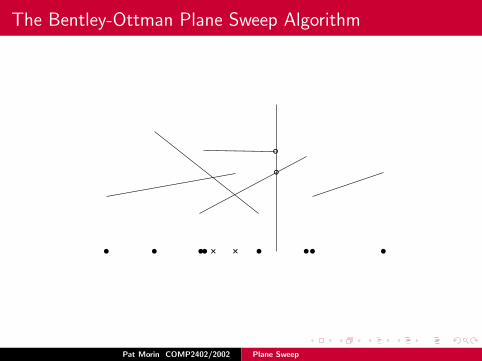
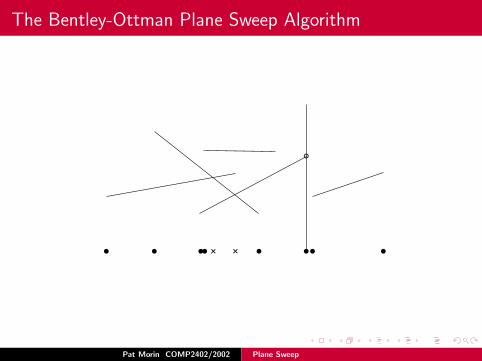
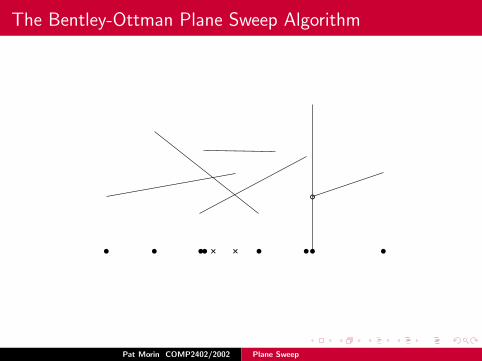
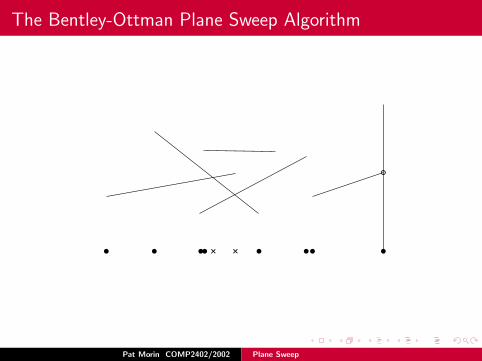
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to right
I The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)
I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairs
I Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is vertical
I No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
I The plane sweep algorithm runs a simulation
I A vertical line (the sweep line) sweeps from left to rightI The sweep line pauses at
I The endpoints of segments (endpoint events)I The intersection points (intersection events)
I During intersection events, we record the intersecting pairsI Simplifying assumptions:
I No segment is verticalI No three segments intersect in the same point
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Plane Sweep Algorithm
I The algorithm maintains two data structures
I The sweep-line status is a SortedSet that stores the segmentsthat currently intersect the sweep line, ordered from top tobottom (y -coordinate)
I The event queue is a PriorityQueue that stores events(segment endpoints and intersections) ordered from left torigth (x-coordinate)
Pat Morin COMP2402/2002 Plane Sweep
The Plane Sweep Algorithm
I The algorithm maintains two data structures
I The sweep-line status is a SortedSet that stores the segmentsthat currently intersect the sweep line, ordered from top tobottom (y -coordinate)
I The event queue is a PriorityQueue that stores events(segment endpoints and intersections) ordered from left torigth (x-coordinate)
Pat Morin COMP2402/2002 Plane Sweep
The Plane Sweep Algorithm
I The algorithm maintains two data structures
I The sweep-line status is a SortedSet that stores the segmentsthat currently intersect the sweep line, ordered from top tobottom (y -coordinate)
I The event queue is a PriorityQueue that stores events(segment endpoints and intersections) ordered from left torigth (x-coordinate)
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
Initialization
I To ininitializeI set the x-coordinate of the sweep line to −∞
I add all 2n segment endpoints to the event queue
Pat Morin COMP2402/2002 Plane Sweep
Initialization
I To ininitializeI set the x-coordinate of the sweep line to −∞I add all 2n segment endpoints to the event queue
Pat Morin COMP2402/2002 Plane Sweep
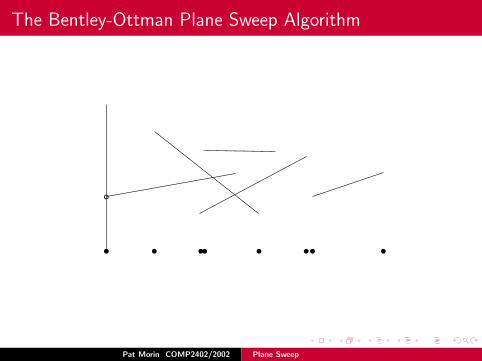
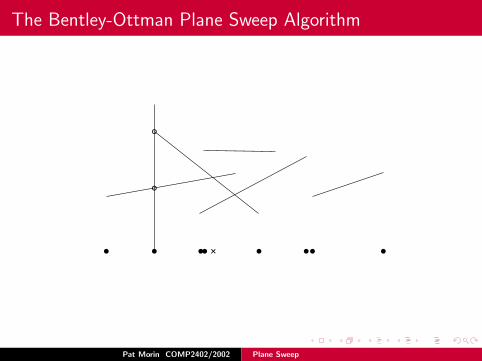
Processing endpoint events
I To process an endpoint event
I For the left endpoint of a segment s:
I Add s to the sweep line statusI Check if s intersects the segment above or below it and add a
crossing event to the event queue if necessary
I For the right endpoints of a segment s:
I Remove s from the sweep line statusI Check if the element above and below s cross and add a
crossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing endpoint events
I To process an endpoint eventI For the left endpoint of a segment s:
I Add s to the sweep line statusI Check if s intersects the segment above or below it and add a
crossing event to the event queue if necessary
I For the right endpoints of a segment s:
I Remove s from the sweep line statusI Check if the element above and below s cross and add a
crossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing endpoint events
I To process an endpoint eventI For the left endpoint of a segment s:
I Add s to the sweep line status
I Check if s intersects the segment above or below it and add acrossing event to the event queue if necessary
I For the right endpoints of a segment s:
I Remove s from the sweep line statusI Check if the element above and below s cross and add a
crossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing endpoint events
I To process an endpoint eventI For the left endpoint of a segment s:
I Add s to the sweep line statusI Check if s intersects the segment above or below it and add a
crossing event to the event queue if necessary
I For the right endpoints of a segment s:
I Remove s from the sweep line statusI Check if the element above and below s cross and add a
crossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing endpoint events
I To process an endpoint eventI For the left endpoint of a segment s:
I Add s to the sweep line statusI Check if s intersects the segment above or below it and add a
crossing event to the event queue if necessary
I For the right endpoints of a segment s:
I Remove s from the sweep line statusI Check if the element above and below s cross and add a
crossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing endpoint events
I To process an endpoint eventI For the left endpoint of a segment s:
I Add s to the sweep line statusI Check if s intersects the segment above or below it and add a
crossing event to the event queue if necessary
I For the right endpoints of a segment s:I Remove s from the sweep line status
I Check if the element above and below s cross and add acrossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing endpoint events
I To process an endpoint eventI For the left endpoint of a segment s:
I Add s to the sweep line statusI Check if s intersects the segment above or below it and add a
crossing event to the event queue if necessary
I For the right endpoints of a segment s:I Remove s from the sweep line statusI Check if the element above and below s cross and add a
crossing event to the event queue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing crossing events
I To process a crossing event where s and t cross:
I Switch the order of s and t in the sweep line statusI Check if s or t intersects the new elements above and below
them in the sweep line and add crossing events to the eventqueue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing crossing events
I To process a crossing event where s and t cross:I Switch the order of s and t in the sweep line status
I Check if s or t intersects the new elements above and belowthem in the sweep line and add crossing events to the eventqueue if necessary
Pat Morin COMP2402/2002 Plane Sweep
Processing crossing events
I To process a crossing event where s and t cross:I Switch the order of s and t in the sweep line statusI Check if s or t intersects the new elements above and below
them in the sweep line and add crossing events to the eventqueue if necessary
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
The Bentley-Ottman Plane Sweep Algorithm
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I The Plane Sweep Algorithm is correct because any pair s, tthat crosses will eventually become adjacent in the sweep-linestatus structure.
I When they become adjacent, their crossing event is added tothe event queue
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I The Plane Sweep Algorithm is correct because any pair s, tthat crosses will eventually become adjacent in the sweep-linestatus structure.
I When they become adjacent, their crossing event is added tothe event queue
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I We process 2n + k events
I Each event requires
I Adding an element to the event queue: O(log n)I Getting an element from the event queue: O(log n)I Seaching the sweepline status: O(log n)
I Total running time is therefore(2n + k) · O(log n) = O((n + k) log n)
Pat Morin COMP2402/2002 Plane Sweep

Analysis
I We process 2n + k eventsI Each event requires
I Adding an element to the event queue: O(log n)I Getting an element from the event queue: O(log n)I Seaching the sweepline status: O(log n)
I Total running time is therefore(2n + k) · O(log n) = O((n + k) log n)
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I We process 2n + k eventsI Each event requires
I Adding an element to the event queue: O(log n)
I Getting an element from the event queue: O(log n)I Seaching the sweepline status: O(log n)
I Total running time is therefore(2n + k) · O(log n) = O((n + k) log n)
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I We process 2n + k eventsI Each event requires
I Adding an element to the event queue: O(log n)I Getting an element from the event queue: O(log n)
I Seaching the sweepline status: O(log n)
I Total running time is therefore(2n + k) · O(log n) = O((n + k) log n)
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I We process 2n + k eventsI Each event requires
I Adding an element to the event queue: O(log n)I Getting an element from the event queue: O(log n)I Seaching the sweepline status: O(log n)
I Total running time is therefore(2n + k) · O(log n) = O((n + k) log n)
Pat Morin COMP2402/2002 Plane Sweep
Analysis
I We process 2n + k eventsI Each event requires
I Adding an element to the event queue: O(log n)I Getting an element from the event queue: O(log n)I Seaching the sweepline status: O(log n)
I Total running time is therefore(2n + k) · O(log n) = O((n + k) log n)
Pat Morin COMP2402/2002 Plane Sweep
Summary
I Theorem: The Bentley-Ottman Plane Sweep Algorithm cancompute all pairs of intersecting segments in O((n + k) log n)time, where k is the number of pairs of segments thatintersect
I Plane-sweep algorithms can solve many other problems:
I Given any set of objects, determine if any pair in the setintersect: O(n log n) time
I Find the closest pair of points among n points: O(n log n)I A data structure for the planar point location problem:
O(n log n) space and O(log n) query time
Pat Morin COMP2402/2002 Plane Sweep
Summary
I Theorem: The Bentley-Ottman Plane Sweep Algorithm cancompute all pairs of intersecting segments in O((n + k) log n)time, where k is the number of pairs of segments thatintersect
I Plane-sweep algorithms can solve many other problems:
I Given any set of objects, determine if any pair in the setintersect: O(n log n) time
I Find the closest pair of points among n points: O(n log n)I A data structure for the planar point location problem:
O(n log n) space and O(log n) query time
Pat Morin COMP2402/2002 Plane Sweep
Summary
I Theorem: The Bentley-Ottman Plane Sweep Algorithm cancompute all pairs of intersecting segments in O((n + k) log n)time, where k is the number of pairs of segments thatintersect
I Plane-sweep algorithms can solve many other problems:I Given any set of objects, determine if any pair in the set
intersect: O(n log n) time
I Find the closest pair of points among n points: O(n log n)I A data structure for the planar point location problem:
O(n log n) space and O(log n) query time
Pat Morin COMP2402/2002 Plane Sweep
Summary
I Theorem: The Bentley-Ottman Plane Sweep Algorithm cancompute all pairs of intersecting segments in O((n + k) log n)time, where k is the number of pairs of segments thatintersect
I Plane-sweep algorithms can solve many other problems:I Given any set of objects, determine if any pair in the set
intersect: O(n log n) timeI Find the closest pair of points among n points: O(n log n)
I A data structure for the planar point location problem:O(n log n) space and O(log n) query time
Pat Morin COMP2402/2002 Plane Sweep
Summary
I Theorem: The Bentley-Ottman Plane Sweep Algorithm cancompute all pairs of intersecting segments in O((n + k) log n)time, where k is the number of pairs of segments thatintersect
I Plane-sweep algorithms can solve many other problems:I Given any set of objects, determine if any pair in the set
intersect: O(n log n) timeI Find the closest pair of points among n points: O(n log n)I A data structure for the planar point location problem:
O(n log n) space and O(log n) query time
Pat Morin COMP2402/2002 Plane Sweep



![Designing Geometric Algorithmswebdoc.sub.gwdg.de/ebook/diss/2003/fu-berlin/2002/237/kap6.pdf · plane [Ede80]. Our sweep line will be a vertical line sweeping the plane from left](https://static.fdocuments.in/doc/165x107/5f93e09374308e421e2033a9/designing-geometric-plane-ede80-our-sweep-line-will-be-a-vertical-line-sweeping.jpg)