Picking Up the Pieces: Grasp Planning via Decomposition Trees Corey Goldfeder, Peter K. Allen,...
18
Picking Up the Pieces: Grasp Planning via Decomposition Trees Corey Goldfeder, Peter K. Allen, Claire Lackner, Raphael Pelosoff
-
date post
20-Dec-2015 -
Category
Documents
-
view
219 -
download
2
Transcript of Picking Up the Pieces: Grasp Planning via Decomposition Trees Corey Goldfeder, Peter K. Allen,...
Picking Up the Pieces: Grasp Planning via
Decomposition Trees
Corey Goldfeder, Peter K. Allen, Claire Lackner, Raphael
Pelosoff
Grasp Synthesis High dimensional, nonlinear space
configuration space = joints + pose grasp quality is not smooth
Difficult to model analytically Must account for dynamics, soft
contacts, non-fingertip contacts, material properties
Many constraints Obstacles, hand kinematics and scale

Our approach Simulation based grasp synthesis
has many advantages
Space of all grasps is too large to explore fully in simulation
We want a subspace that contains many good grasps

GraspIt! Grasp simulator for both robotic
and human hands
Includes kinematics,dynamics
Real time 3D visualization
Efficiently computesgrasp quality
Graspit!: A Versatile Simulator for Robotic Grasping, IEEE Robotics and Automation Magazine, 11.4

Grasping By Parts Automatic Grasp Planning
Using Shape Primitives -Miller et. al.
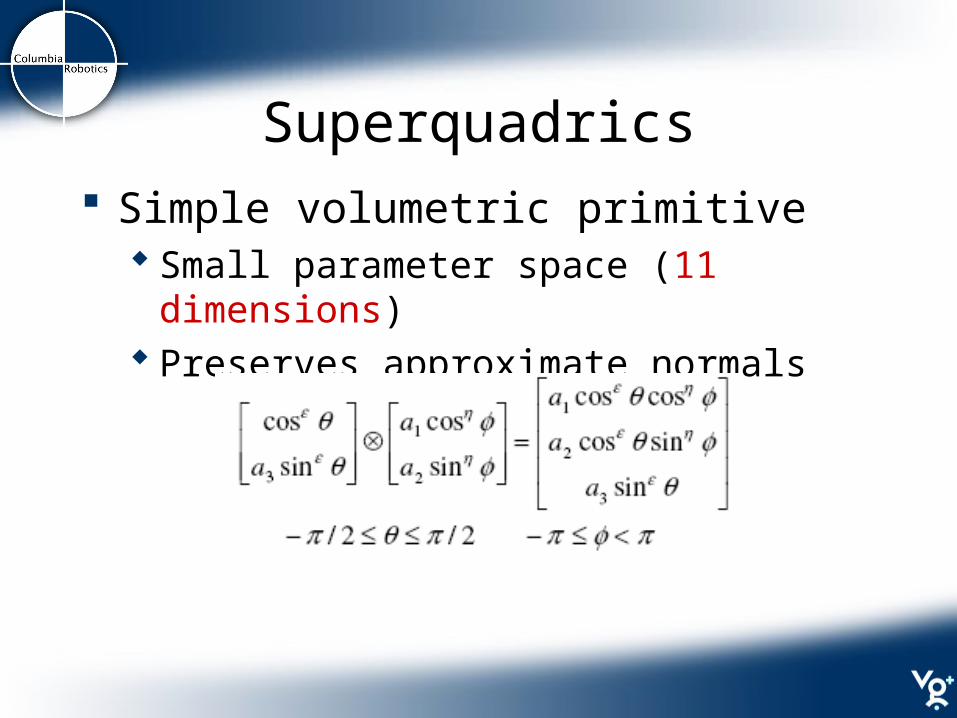
Superquadrics Simple volumetric primitive
Small parameter space (11 dimensions)
Preserves approximate normals
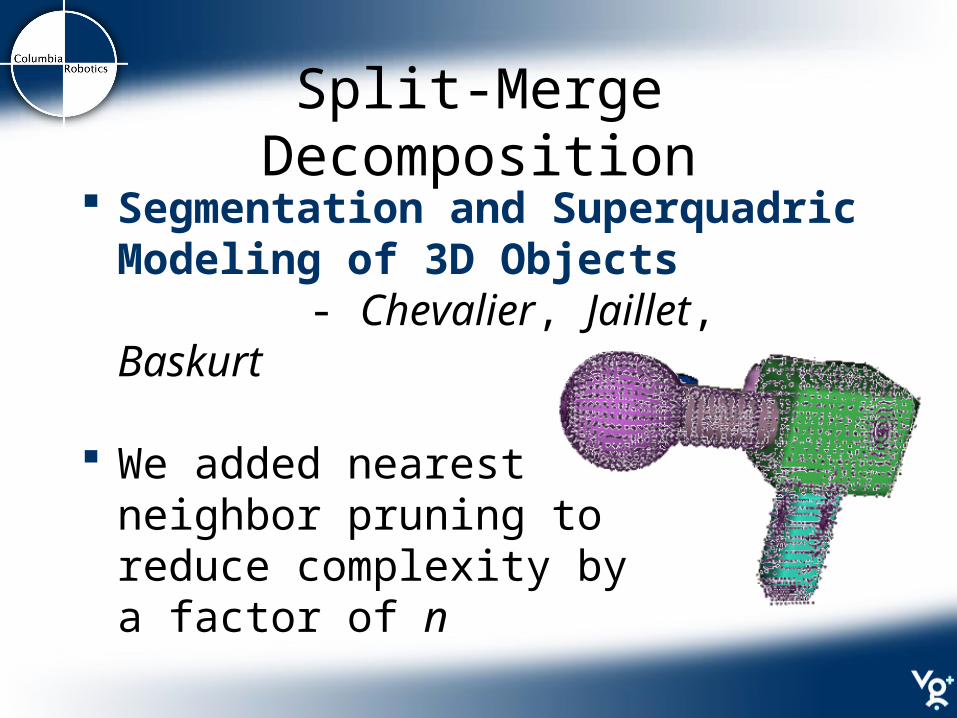
Segmentation and Superquadric Modeling of 3D Objects
- Chevalier, Jaillet, Baskurt
We added nearest neighbor pruning to reduce complexity by a factor of n
Split-Merge Decomposition
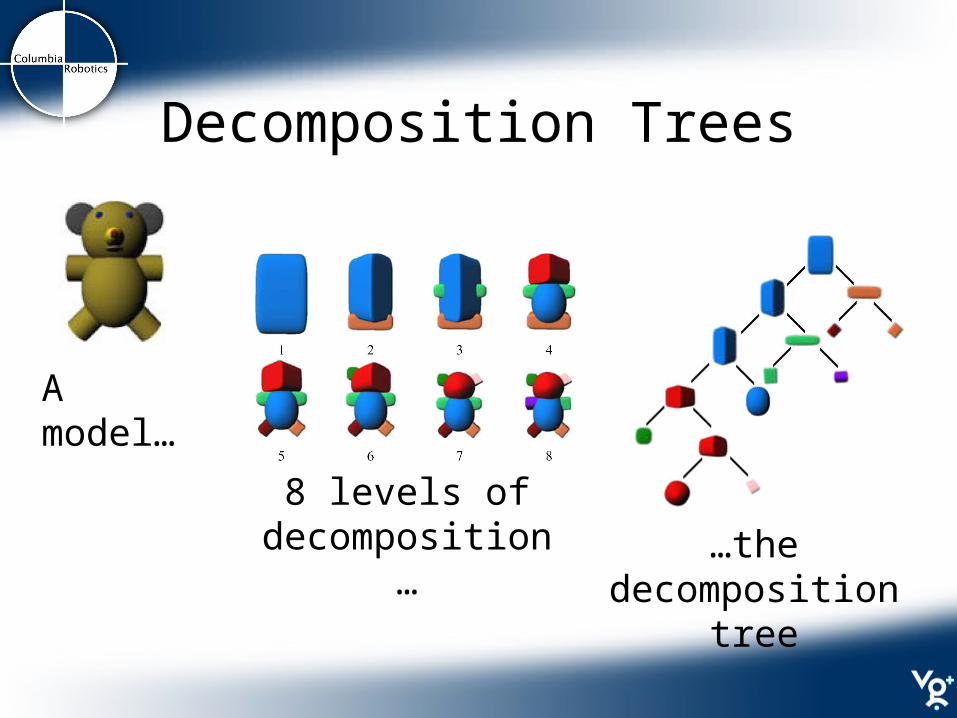
Decomposition Trees
A model…
8 levels of decomposition
……the decomposition
tree

Decomposition Trees Building a tree from the bottom up
Pairwise merge of parts with least error
How Many Parts? Use an error threshold?
Problem: large superquadrics can swallow important features, like handles, without much error
Solution: fixed number of parts decompose all objects to n
superquadrics n is chosen experimentally for a
given hand
Planner Overview Decompose into tree with n leaves
Plan grasps on superquadrics using entire tree, not just leaves
Simulate candidates on actual geometry, using GraspIt!
Rank results by grasp quality
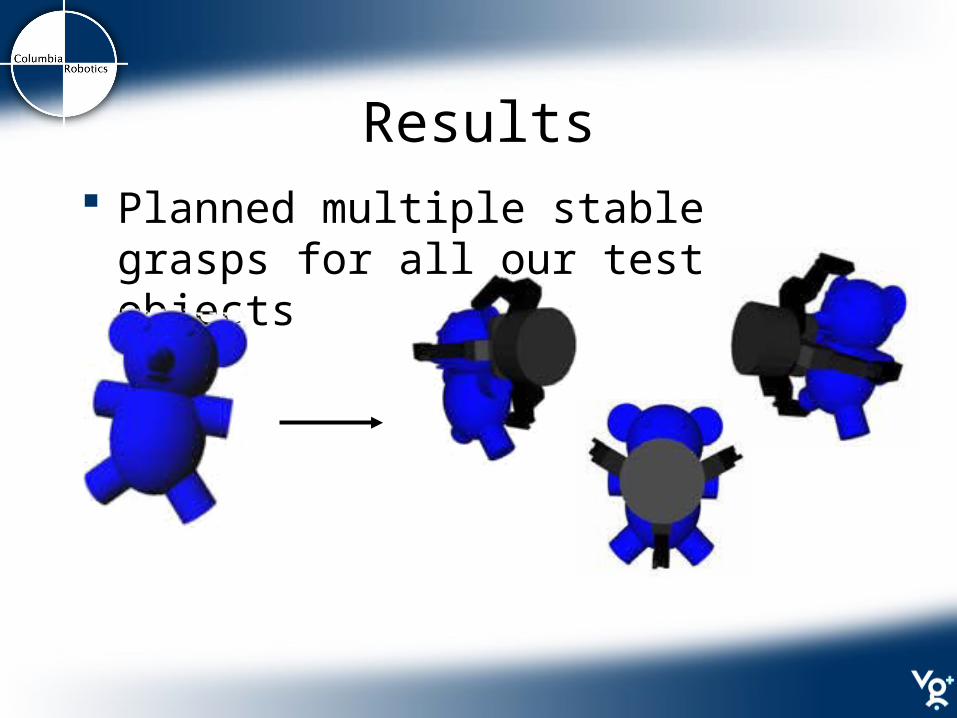
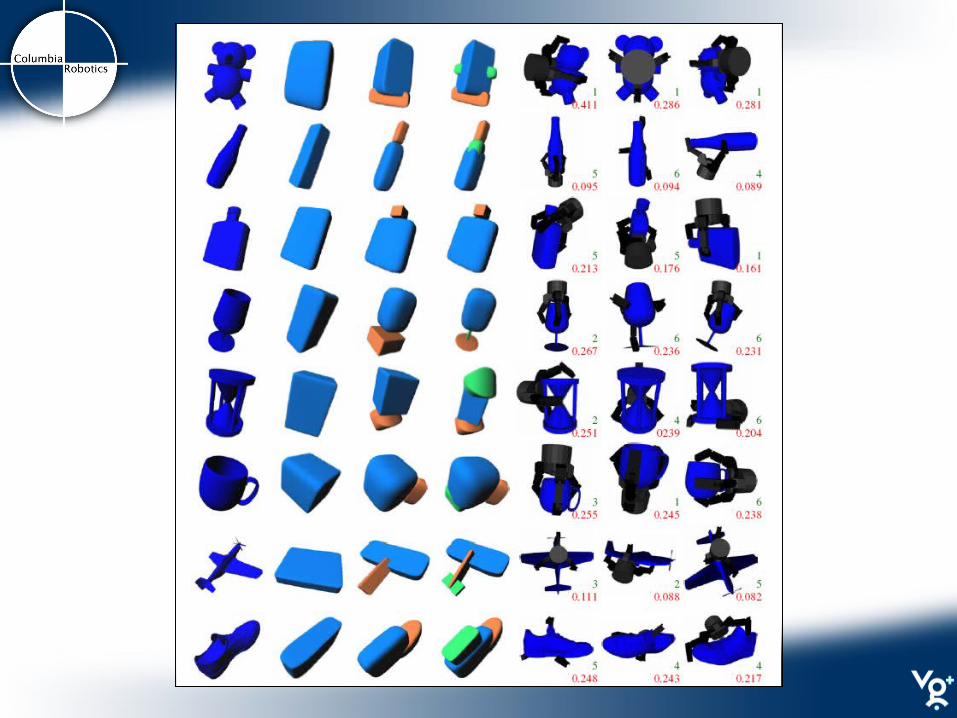
Results Planned multiple stable grasps for
all our test objects
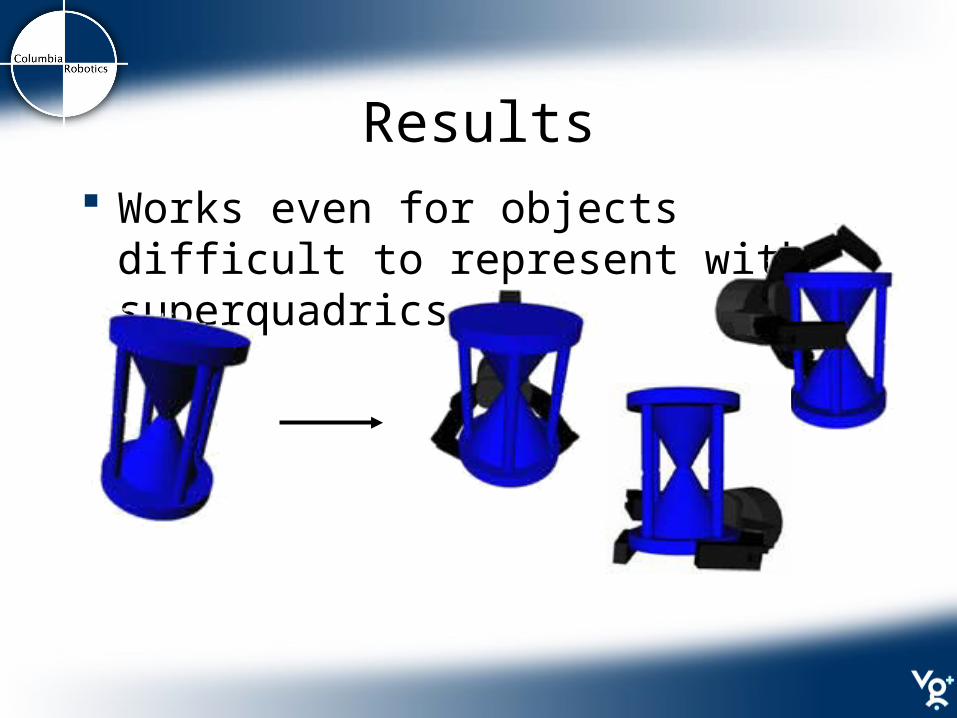
Results Works even for objects difficult to
represent with superquadrics
Difficulties Assumes knowledge of object
geometry
Superquadric decomposition is slow
Grasping a single part is done heuristically
Cannot plan candidates on parts from different branches of the tree
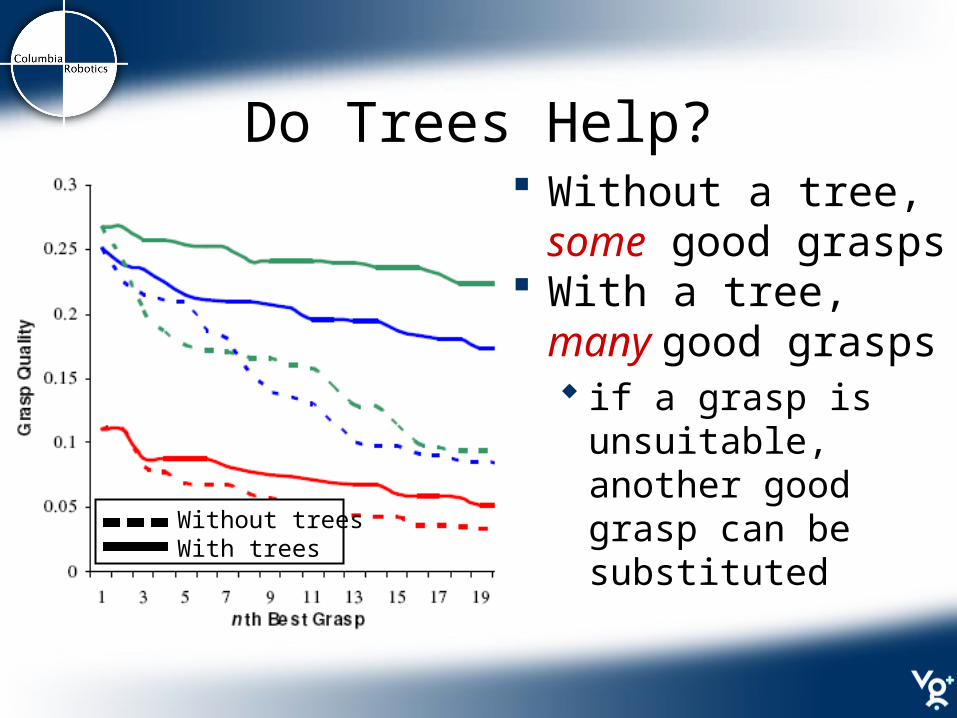
Do Trees Help?
Without treesWith trees
Without a tree, some good grasps
With a tree, many good grasps if a grasp is
unsuitable, another good grasp can be substituted
Contributions Fully automatic implementation of
grasping-by-parts
Abstracts away fine features
Allows multiple parts to be planned on as a group

Future Work Incorporate existing SVM planner
for individual superquadrics
Speed up decomposition
Questions?