Philippe GOUGEON, Collaborative Project Director – Valeo, Comfort & Driving Assistance Business...
11
« Mieux connaître les systèmes de navigation par satellite pour une mobilité plus intelligente » Journée technique ATEC ITS France Lundi 16 mars à l’UIC 16, rue Jean Rey 75015 Paris L’équipement du parc automobile : quelle place pour le GNSS ? Philippe Gougeon – Valeo Comfort & Driving Assistance Directeur Projets Collaboratifs
-
Upload
atecitsfrance -
Category
Presentations & Public Speaking
-
view
178 -
download
1
Transcript of Philippe GOUGEON, Collaborative Project Director – Valeo, Comfort & Driving Assistance Business...

« Mieux connaître les systèmes de navigation par satellite pour une mobilité plus intelligente »
Journée technique ATEC ITS France
Lundi 16 mars
à l’UIC
16, rue Jean Rey
75015 Paris
L’équipement du parc automobile : quelle place pour le
GNSS ?
Philippe Gougeon – Valeo Comfort & Driving Assistance
Directeur Projets Collaboratifs
ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 2
Valeo Strategy
What is the role of GNSS in line with this strategy?
CO2emissions: Reductionand Innovation
Intuitive Driving: SecureAffordableEfficient

ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 3
Valeo Research & Innovation: a success story
From Ultrasonic Park Assistance…
… to Urban Assistance
PACE Award:
The Benchmark for Supplier
Innovation
ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 4
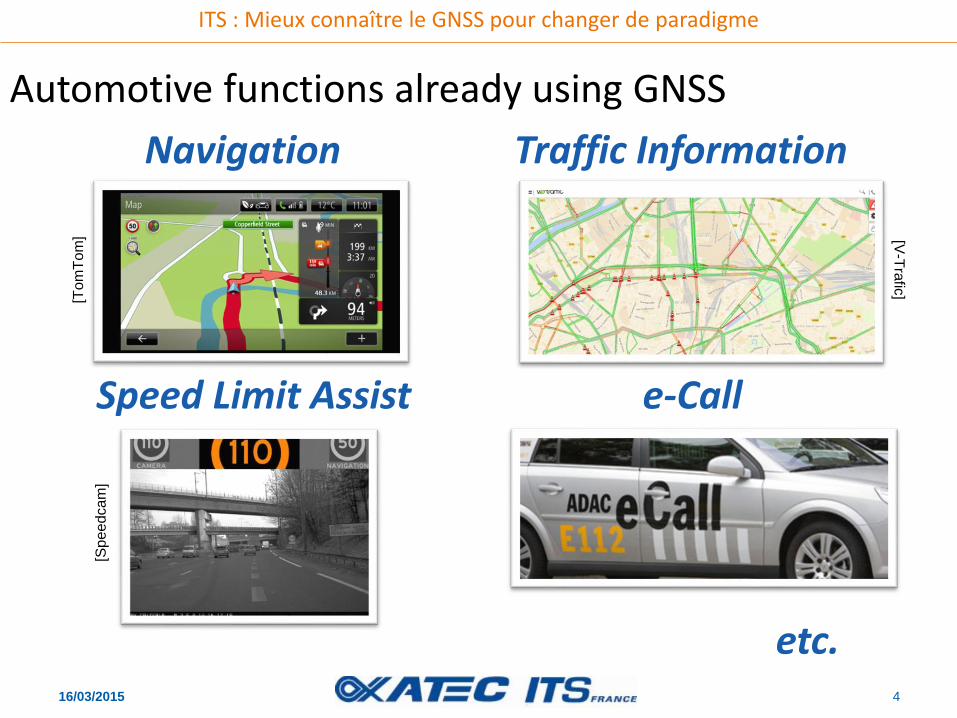
Automotive functions already using GNSS
Navigation Traffic Information
Speed Limit Assist e-Call
etc.
[To
mT
om
]
[Sp
ee
dca
m]
[V-T
rafic
]

ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 5
Next Automotive Functions using GNSSCooperative ITS Automated Driving
[AD activities in Japan, T.Yamamoto 7/2014]
[BMW Urban Driving Experience Challenge 2012]
[C2C consortium, N.Andersen, 11/2014]
ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 6
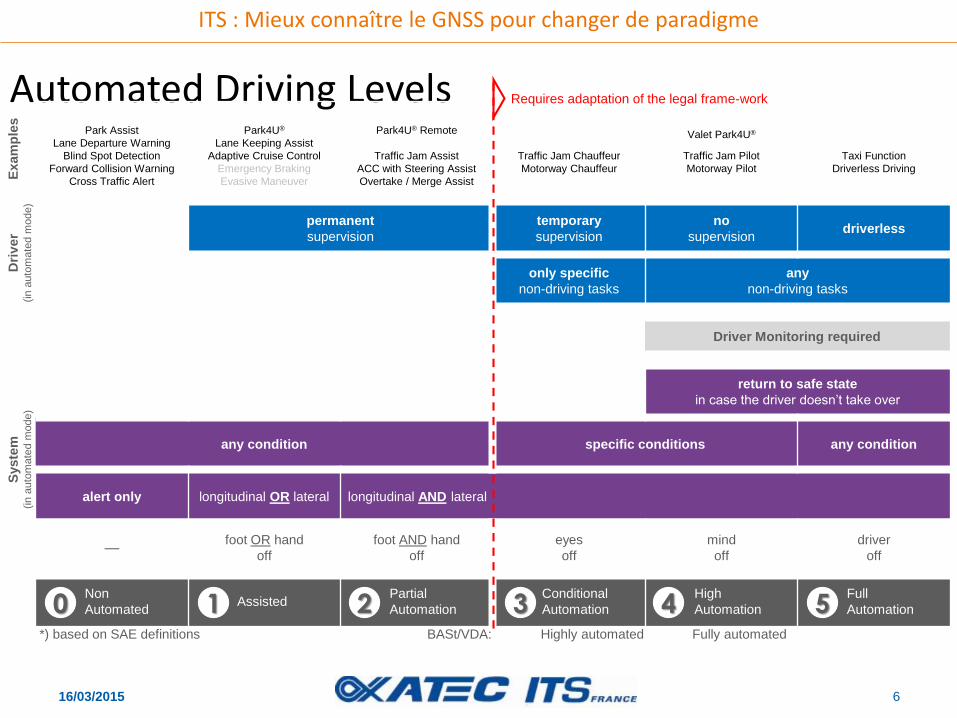
Automated Driving LevelsPark Assist
Lane Departure Warning
Blind Spot Detection
Forward Collision Warning
Cross Traffic Alert
Park4U®
Lane Keeping Assist
Adaptive Cruise Control
Emergency Braking
Evasive Maneuver
Park4U® Remote
Traffic Jam Assist
ACC with Steering Assist
Overtake / Merge Assist
Traffic Jam Chauffeur
Motorway Chauffeur
Valet Park4U®
Traffic Jam Pilot
Motorway Pilot
Taxi Function
Driverless Driving
Driver executes
longitudinal AND lateral
control at all time
Driver executes either
longitudinal OR lateral
control not executed by the
system
Driver constantly
supervises the system and
takes over immediately
when required
Driver constantly
supervises the system and
takes over immediately
(~1s) when required
Driver takes over upon
request within lead-time
(<10s) (no constant
supervision required)
Driver takes over upon
request within lead-time
(no supervision required)
Driver may activate system
at any time
System can provide
information and alerts
System executes either
longitudinal OR lateral
control when activated
System executes
longitudinal AND lateral
control when activated
System deactivates after
requesting driver takeover
with a sufficient lead-time
System permits activation
only for specified conditions
System executes
longitudinal AND lateral
control when activated
System initiates deactivation
when specified conditions
are no longer met
System transition to minimal
risk condition if driver does
not take over
System deactivates only
after driver takes over
System permits activation
only for specified conditions
System executes
longitudinal AND lateral
control when activated
System transition to minimal
risk condition in case of a
system error or when
reaching the system
limitation
System executes
longitudinal AND lateral
control when activated
Non
AutomatedAssisted
Partial
Automation
Conditional
Automation
High
Automation
Full
Automation
Exam
ple
s
*) based on SAE definitions
0 1 2 3 4 5
permanent
supervision
temporary
supervision
no
supervisiondriverless
only specific
non-driving tasks
any
non-driving tasks
return to safe state
in case the driver doesn’t take over
any condition specific conditions any condition
alert only longitudinal OR lateral longitudinal AND lateral
––foot OR hand
off
foot AND hand
off
eyes
off
mind
off
driver
off
Highly automated Fully automatedBASt/VDA:
Driver Monitoring required
Requires adaptation of the legal frame-work
Dri
ver
(in
auto
mate
d m
ode)
Syste
m(in
auto
mate
d m
ode)

ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 7
Current localization accuracy vs needs
Next Gen ego-localization device is necessary, at affordable cost
Use cases Current GPS 2014 Expected
C2X – Safety
Collision alert
X-Y : 5m
Z : 50m
X-Y : 0.5m
Z : 1m
Automated Driving
level 4
X-Y : 5m
Z : 50m
X-Y : 0.1m
Z : 1m
Yaw: 2°
ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 8
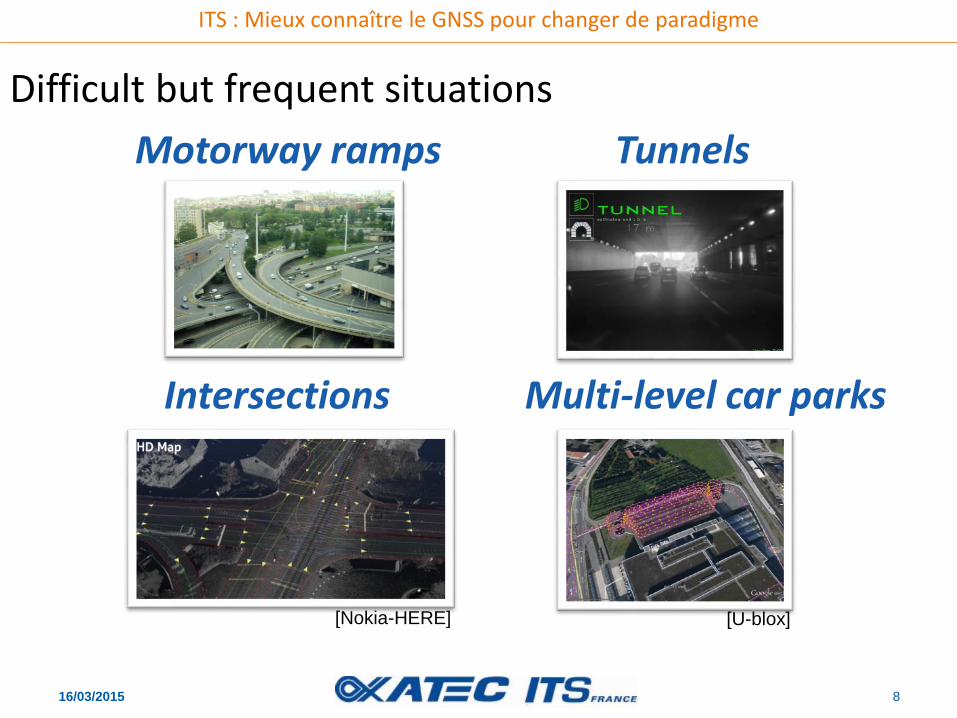
Difficult but frequent situations
Motorway ramps Tunnels
Intersections Multi-level car parks
[U-blox][Nokia-HERE]
ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 9
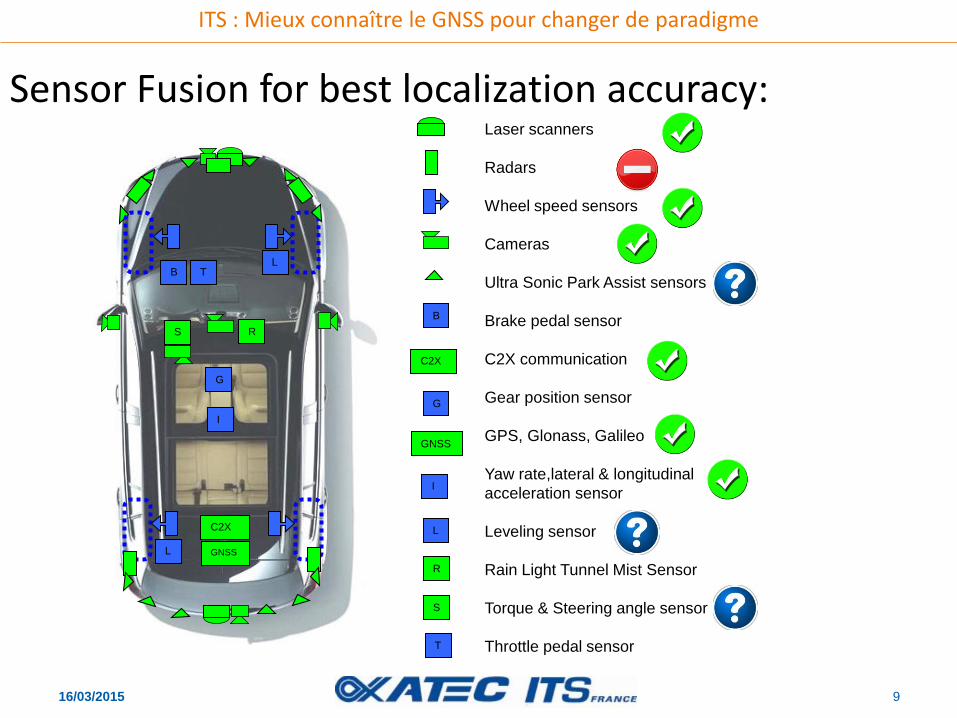
Sensor Fusion for best localization accuracy:
S
TBL
L
G
I
GNSS
R
C2X
Laser scanners
Radars
Wheel speed sensors
Cameras
Ultra Sonic Park Assist sensors
Brake pedal sensor
C2X communication
Gear position sensor
GPS, Glonass, Galileo
Yaw rate,lateral & longitudinal
acceleration sensor
Leveling sensor
Rain Light Tunnel Mist Sensor
Torque & Steering angle sensor
Throttle pedal sensor
B
G
L
T
I
GNSS
S
R
C2X

ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 10
Conclusions
Automated Driving: evolutionary process, level 3 then level 4
Fail safe approach for level 4 Automated Driving
Work in progress !

ITS : Mieux connaître le GNSS pour changer de paradigme
16/03/2015 11