PERSUASION MEETS DELEGATION · 2020-05-21 · persuasion, and vice versa. For instance, persuasion...
35
PERSUASION MEETS DELEGATION Anton Kolotilin and Andriy Zapechelnyuk Abstract. A principal can restrict an agent’s information (the persuasion prob- lem) or restrict an agent’s discretion (the delegation problem). We show that these problems are generally equivalent — solving one solves the other. We use tools from the persuasion literature to generalize and extend many results in the delega- tion literature, as well as to address novel delegation problems, such as monopoly regulation with a participation constraint. JEL Classification: D82, D83, L43 Keywords: persuasion, delegation, regulation Date : 7th February 2019. Kolotilin : School of Economics, UNSW Business School, Sydney, NSW 2052, Australia. E-mail: [email protected]. Zapechelnyuk : School of Economics and Finance, University of St Andrews, Castlecli↵e, the Scores, St Andrews KY16 9AR, UK. E-mail: [email protected]. We are grateful to Tymofiy Mylovanov, with whom we are working on related projects. We thank Ricardo Alonso, Kyle Bagwell, Benjamin Brooks, Deniz Dizdar, Piotr Dworczak, Alexander Frankel, Drew Fudenberg, Gabriele Gratton, Yingni Guo, Emir Kamenica, Navin Kartik, Ming Li, Hongyi Li, Carlos Oyarzun, Alessandro Pavan, Eric Rasmusen, Philip Reny, Joel Sobel, and Thomas Tr¨ oger for helpful comments and suggestions. We also thank participants at various seminars and conferences. Part of this research was carried out while Anton Kolotilin was visiting MIT Sloan School of Management, whose hospitality and support is greatly appreciated. Anton Kolotilin also gratefully acknowledges support from the Australian Research Council Discovery Early Career Research Award DE160100964. Andriy Zapechelnyuk gratefully acknowledges support from the Economic and Social Research Council Grant ES/N01829X/1. 1
Transcript of PERSUASION MEETS DELEGATION · 2020-05-21 · persuasion, and vice versa. For instance, persuasion...

PERSUASION MEETS DELEGATION
Anton Kolotilin and Andriy Zapechelnyuk
Abstract. A principal can restrict an agent’s information (the persuasion prob-lem) or restrict an agent’s discretion (the delegation problem). We show that theseproblems are generally equivalent — solving one solves the other. We use toolsfrom the persuasion literature to generalize and extend many results in the delega-tion literature, as well as to address novel delegation problems, such as monopolyregulation with a participation constraint.
JEL Classification: D82, D83, L43
Keywords: persuasion, delegation, regulation
Date: 7th February 2019.
Kolotilin: School of Economics, UNSW Business School, Sydney, NSW 2052, Australia. E-mail:[email protected] : School of Economics and Finance, University of St Andrews, Castlecli↵e, the Scores,St Andrews KY16 9AR, UK. E-mail: [email protected].
We are grateful to Tymofiy Mylovanov, with whom we are working on related projects. Wethank Ricardo Alonso, Kyle Bagwell, Benjamin Brooks, Deniz Dizdar, Piotr Dworczak, AlexanderFrankel, Drew Fudenberg, Gabriele Gratton, Yingni Guo, Emir Kamenica, Navin Kartik, MingLi, Hongyi Li, Carlos Oyarzun, Alessandro Pavan, Eric Rasmusen, Philip Reny, Joel Sobel, andThomas Troger for helpful comments and suggestions. We also thank participants at variousseminars and conferences. Part of this research was carried out while Anton Kolotilin was visitingMIT Sloan School of Management, whose hospitality and support is greatly appreciated. AntonKolotilin also gratefully acknowledges support from the Australian Research Council DiscoveryEarly Career Research Award DE160100964. Andriy Zapechelnyuk gratefully acknowledges supportfrom the Economic and Social Research Council Grant ES/N01829X/1.
1

2 KOLOTILIN AND ZAPECHELNYUK
1. Introduction
There are two ways to influence decision making: delegation and persuasion. Thedelegation literature, initiated by Holmstrom (1984), studies the design of decisionrules. The persuasion literature, set in motion by Kamenica and Gentzkow (2011),studies the design of information disclosure rules.
The delegation problem has been used to design organizational decision processes(Dessein, 2002), monopoly regulation policies (Alonso and Matouschek, 2008), andinternational trade agreements (Amador and Bagwell, 2013). The persuasion prob-lem has been used to design school grading policies (Ostrovsky and Schwarz, 2010),internet advertising strategies (Rayo and Segal, 2010), and forensic tests (Kamenicaand Gentzkow, 2011).
This paper shows that, under general assumptions, the delegation and persuasionproblems are equivalent, thereby bridging the two strands of literature. The implica-tion is that the existing insights and results in one problem can be used to understandand solve the other problem.
Both delegation and persuasion problems have a principal and an agent whose payo↵sdepend on an agent’s decision and a state of the world. The sets of decisions and statesare intervals of the real line. The agent’s payo↵ function satisfies standard single-peakedness and sorting conditions. In a delegation problem, the agent privately knowsthe state and the principal commits to a set of decisions from which the agent chooses.In a persuasion problem, the principal designs the agent’s information structure andthe agent freely chooses a decision. The principal’s tradeo↵ is that giving morediscretion to the agent in the delegation problem and disclosing more information tothe agent in the persuasion problem allows for better use of information about thestate, but limits control over the biased agent’s decision.
We consider balanced delegation and monotone persuasion problems. In the balanceddelegation problem, the principal may not be able to exclude certain indispensable de-cisions of the agent. This problem nests the standard delegation problem and includes,in particular, a novel delegation problem with an agent’s participation constraint.
In the monotone persuasion problem, the principal chooses a monotone partitionalinformation structure that either reveals the state or pools it with adjacent states.This problem incorporates constraints faced by information designers in practice. Forexample, a non-monotone grading policy that gives better grades to worse performingstudents will be perceived as unfair and will be manipulated by strategic students.Moreover, in many special cases, optimal information structures are monotone parti-tions.
The main result of the paper is that the balanced delegation and monotone persuasionproblems are strategically equivalent. For each primitive of one problem we explicitlyconstruct an equivalent primitive of the other problem. This construction equatesthe marginal payo↵s and swaps the roles of decisions and states in the two problems.

PERSUASION MEETS DELEGATION 3
Intuitively, decisions in the delegation problem play the role of states in the persua-sion problem because the principal controls decisions in the delegation problem and(information about) states in the persuasion problem. It is worth noting that thisequivalence result is fundamentally di↵erent from the revelation principle. Specific-ally, the sets of implementable (and, therefore, optimal) decision outcomes generallydi↵er in the delegation and persuasion problems with the same payo↵ functions.
To prove the equivalence result, we show that the balanced delegation and monotonepersuasion problems are equivalent to the following discriminatory disclosure prob-lem. The principal’s and agent’s payo↵s depend on an agent’s binary action, a stateof the world, and an agent’s private type. The sets of states and types are intervals ofthe real line. The agent’s payo↵ function is single-crossing in the state and type. Theprincipal designs a menu of cuto↵ tests, where a cuto↵ test discloses whether the stateis below or above a cuto↵. The agent selects a test from the menu and chooses betweeninaction and action depending on his private type and the information revealed bythe test.
To see why the discriminatory disclosure problem is equivalent to the balanced deleg-ation problem, observe that the agent’s essential decision is the selection of a cuto↵test from the menu. Because the agent’s payo↵ function is single-crossing in thestate, the agent optimally chooses inaction/action if the selected test discloses thatthe state is below/above the cuto↵. Thus, this problem can be interpreted as a del-egation problem in which a delegation set is identified with a menu of cuto↵s, andthe agent’s decision with his selection of a cuto↵ from the menu.
To see why the discriminatory disclosure problem is equivalent to the monotone per-suasion problem, observe that each menu of cuto↵ tests defines a monotone partitionof the state space. Because the agent’s payo↵ function is single-crossing in the state,the agent’s optimal choice between inaction and action is the same whether he ob-serves the partition element that contains the state or the result of the optimallyselected cuto↵ test. Moreover, because the agent’s payo↵ function is single-crossingin his type, the agent optimally chooses inaction/action if his type is below/above athreshold. Thus, this problem can be interpreted as a persuasion problem in which amonotone partition is identified with a menu of cuto↵s, and the agent’s decision witha threshold type.
We use our equivalence result to solve a monopoly regulation problem in which awelfare-maximizing regulator (principal) restricts the set of prices available to a mono-polist (agent) who privately knows his cost. This problem was first studied by Baronand Myerson (1982) as a mechanism design problem with transfers. Alonso andMatouschek (2008) pointed out that transfers between the regulator and monopolistare often forbidden, and thus, the monopoly regulation problem can be formulatedas a delegation problem. Alonso and Matouschek (2008) omitted the monopolist’sparticipation constraint, so under their optimal regulation policy, the monopolistsometimes operates at a loss. Amador and Bagwell (2016) characterized the optimalregulation policy taking the participation constraint into account.

4 KOLOTILIN AND ZAPECHELNYUK
The monopoly regulation problem, with and without the participation constraint,can be formulated as a balanced delegation problem. We provide an elegant methodof solving this problem, by recasting it as a monotone persuasion problem and usinga single result from the persuasion literature. When the demand function is linearand the cost distribution is unimodal, the optimal regulation policy takes a simpleform that is often used in practice. The regulator imposes a price cap and allowsthe monopolist to choose any price not exceeding the cap. The optimal price cap ishigher when the participation constraint is present; so the monopolist is given morediscretion when he has an option to exit.
The literature has focused on linear delegation and linear persuasion in which themarginal payo↵s are linear in the decision and the state, respectively. We showthe equivalence of linear balanced delegation and linear monotone persuasion. Wetranslate a linear delegation problem to the equivalent linear persuasion problemand solve it using methods in Kolotilin (2018) and Dworczak and Martini (2019).Specifically, we provide conditions under which a candidate delegation set is optimal.For an interval delegation set, these conditions coincide with those in Alonso andMatouschek (2008), Amador and Bagwell (2013), and Amador, Bagwell, and Frankel(2018), but we impose weaker regularity assumptions. For a two-interval delegationset, our conditions are novel and imply special cases in Melumad and Shibano (1991)and Alonso and Matouschek (2008).
Our equivalence result can also be used to translate the existing results in nonlin-ear delegation problems to equivalent nonlinear persuasion problems, and vice versa.Nonlinear delegation is considered in Holmstrom (1984), Alonso and Matouschek(2008), Amador and Bagwell (2013), and Amador, Bagwell, and Frankel (2018). Non-linear persuasion is considered in Rayo and Segal (2010), Kamenica and Gentzkow(2011), Kolotilin (2018), Dworczak and Martini (2019), and Guo and Shmaya (2019).
The rest of the paper is organized as follows. In Section 2, we define the balanceddelegation and monotone persuasion problems. In Section 3, we present and prove theequivalence result. In Section 4, we apply the equivalence result to solve a monopolyregulation problem. In Section 5, we address the linear delegation problem usingtools from the persuasion literature. In Section 6, we present the equivalence resultunder weaker assumptions. In Section 7, we make concluding remarks. The appendixcontains omitted proofs.
2. Two Problems
2.1. Primitives. There are a principal (she) and an agent (he). The agent’s payo↵U(✓, x) and principal’s payo↵ V (✓, x) depend on a decision x 2 [0, 1] and a state✓ 2 [0, 1]. The state is uniformly distributed. We assume that the marginal payo↵sare continuous, and the agent’s payo↵ is supermodular and concave in the decision,1
1We relax these assumptions in Section 6.

PERSUASION MEETS DELEGATION 5
(A1)@
@xU(✓, x) and @
@xV (✓, x) are well defined and continuous in ✓ and x;
(A2)@
@xU(✓, x) is strictly increasing in ✓ and strictly decreasing in x.
A pair (U, V ) is called a primitive of the problem. Let P be the set of all primitivesthat satisfy assumptions (A1) and (A2).
We now describe two problems. In a delegation problem, the agent is fully informedand the principal restricts the agent’s discretion. In a persuasion problem, the agenthas full discretion and the principal restricts the agent’s information.
In both problems, the principal chooses a closed subset ⇧ of [0, 1] that contains theelements 0 and 1. Let
⇧ = {⇧ ⇢ [0, 1] : ⇧ is closed and {0, 1} ⇢ ⇧}.
In the delegation problem, ⇧ describes a set of decisions from which the agent chooses.In the persuasion problem, ⇧ describes a partition of states that the agent observes.
2.2. Balanced Delegation Problem. Consider a primitive (UD, VD) 2 P , where weuse subscript D to refer to the delegation problem. The principal chooses a delegationset ⇧ 2 ⇧. The agent privately observes the state ✓ and chooses a decision x 2 ⇧that maximizes his payo↵,
x⇤D(✓,⇧) = argmax
x2⇧UD(✓, x). (1a)
The principal’s objective is to maximize her expected payo↵,
max⇧2⇧
E⇥VD(✓, x
⇤D(✓,⇧))
⇤. (1b)
By (A2), x⇤D(✓,⇧) is single-valued for almost all ✓, so E
⇥VD(✓, x⇤
D(✓,⇧))
⇤is well defined.
The balanced delegation problem requires delegation sets to include the extreme de-cisions. On the one hand, this requirement can be made non-binding by defining theagent’s and principal’s payo↵s on a su�ciently large interval of decisions so that theextreme decisions are never chosen (Appendix A.3). On the other hand, this require-ment allows to include indispensable decisions of the agent, such as a participationdecision (Sections 4 and 5.3).
2.3. Monotone Persuasion Problem. Consider a primitive (UP , VP ) 2 P , wherewe use subscript P to refer to the persuasion problem. The principal chooses amonotone partitional information structure that partitions the state space into convexsets: separating elements and pooling intervals. A monotone partition is describedby a set ⇧ 2 ⇧ of boundary points of these partition elements. Let
⇡(✓) = sup{✓0 2 ⇧ : ✓0 ✓} and ⇡(✓) = inf{✓0 2 ⇧ : ✓0 > ✓}

6 KOLOTILIN AND ZAPECHELNYUK
for ✓ 2 [0, 1), and ⇡(1) = ⇡(1) = 1. The partition element µ⇧(✓) that contains✓ 2 [0, 1] is given by
µ⇧(✓) =
({✓}, if ⇡(✓) = ⇡(✓),
[⇡(✓), ⇡(✓)), if ⇡(✓) < ⇡(✓).
For example, ⇧ = {0, 1} is the uninformative partition that pools all states,2 and⇧ = [0, 1] is the fully informative partition that separates all states.
The agent observes the partition element µ⇧(✓) that contains the state ✓ and choosesa decision x 2 [0, 1] that maximizes his expected payo↵ given the posterior beliefabout ✓,
x⇤P(✓,⇧) 2 argmax
x2[0,1]E⇥UP (✓
0, x)
��✓0 2 µ⇧(✓)⇤. (2a)
The principal’s objective is to maximize her expected payo↵,
max⇧2⇧
E⇥VP (✓, x
⇤P(✓,⇧))
⇤. (2b)
By (A2), x⇤P(✓,⇧) is single-valued for all ✓, so E
⇥VP (✓, x⇤
P(✓,⇧))
⇤is well defined.
The monotone persuasion problem requires information structures to be monotonepartitions. On the one hand, this requirement is without loss of generality in manyspecial cases, where optimal information structures are monotone partitions (Sec-tion 5). On the other hand, this requirement may reflect incentive and legal con-straints faced by information designers. Monotone partitional information structuresare widespread and include, for example, school grades, tiered certification, creditand consumer ratings.
2.4. Persuasion versus Delegation. We now show that implementable outcomesdi↵er in the persuasion and delegation problems with the same primitive (U, V ) 2 P .
In the persuasion problem with U(✓, x) = �(✓�x)2, consider a monotone partition ⇧0
that reveals whether the state is above or below 1/3. Since ✓ is uniformly distributedon [0, 1], the induced decision of the agent is
x⇤P(✓,⇧0) =
(16 , if ✓ 2
�0, 13
�,
23 , if ✓ 2
�13 , 1
�,
where 1/6 is the midpoint between 0 and 1/3, and 2/3 is the midpoint between 1/3and 1.
This outcome cannot be implemented in the delegation problem with the same prim-itive U(✓, x) = �(✓� x)2. To see this, consider a delegation set ⇧00 that permits onlytwo decisions, 1/6 and 2/3. The induced decision of the agent is
x⇤D(✓,⇧00) =
(16 , if ✓ 2
�0, 5
12
�,
23 , if ✓ 2
�512 , 1
�,
2Formally, state ✓ = 1 is separated, but this is immaterial, because this event has zero probability.

PERSUASION MEETS DELEGATION 7
where 5/12 is the midpoint between 1/6 and 2/3. Thus, the induced decisions inthe persuasion and delegation problems di↵er on the interval of intermediate statesbetween 1/3 and 5/12.3
Note that the outcome x⇤P(·,⇧0) is the first best for the principal whose payo↵ V (✓, x)
is maximized at x = 1/6 for states below 1/3 and is maximized at x = 2/3 forstates above 1/3. This first best is not implementable in the delegation problemwith the same primitive. Conversely, the outcome x
⇤D(·,⇧00) is the first best for the
principal whose payo↵ V (✓, x) is maximized at x = 1/6 for states below 5/12 and ismaximized at x = 2/3 for states above 5/12. This first best is not implementable inthe persuasion problem with the same primitive.4
3. Equivalence
3.1. Main Result. We use von Neumann and Morgenstern’s (1944) notion of stra-tegic equivalence. Primitives (UD, VD) 2 P and (UP , VP ) 2 P of the balanced delega-tion and monotone persuasion problems are equivalent if there exist ↵ > 0 and � 2 Rsuch that
E⇥VD(✓, x
⇤D(✓,⇧))
⇤= ↵E
⇥VP (✓, x
⇤P(✓,⇧))
⇤+ � for all ⇧ 2 ⇧.
That is, if (UD, VD) and (UP , VP ) are equivalent, then, in both problems, the prin-cipal gets the same expected payo↵, up to an a�ne transformation, for each ⇧;consequently, the principal’s optimal solution is also the same.
Theorem 1. For each (UD, VD) 2 P, an equivalent (UP , VP ) 2 P is given by
UP (✓, x) = �Z
x
0
@UD(t, s)
@s
����s=✓
dt and VP (✓, x) = �Z
x
0
@VD(t, s)
@s
����s=✓
dt. (3a)
Conversely, for each (UP , VP ) 2 P, an equivalent (UD, VD) 2 P is given by
UD(✓, x) =
Z 1
x
@UP (s, t)
@t
����t=✓
ds and VD(✓, x) =
Z 1
x
@VP (s, t)
@t
����t=✓
ds. (3b)
Theorem 1 explicitly connects the two problems. In fact, we prove a stronger resultthan Theorem 1. We show that if primitives (UD, VD) 2 P and (UP , VP ) 2 P satisfy
@UD(✓D, x)
@x
����x=✓P
= � @UP (✓P , x)
@x
����x=✓D
and@VD(✓D, x)
@x
����x=✓P
= � @VP (✓P , x)
@x
����x=✓D
for all ✓D, ✓P 2 [0, 1], then, in both problems, not only the principal but also the agentgets the same ex-ante expected payo↵, up to a constant, for each ⇧. This connectionequates the marginal payo↵s from a decision and swaps the roles of decisions and
3Since the outcome x⇤P(·,⇧0) cannot be implemented in the delegation problem, it cannot be
implemented in the balanced delegation problem.4Similarly, if the principal’s payo↵ V (✓, x) is maximized at decision 0 for states below 1/2 and is
maximized at decision 1 for states above 1/2, then the first best is implementable by the balanceddelegation set {0, 1}, but is not implementable by any monotone partition.

8 KOLOTILIN AND ZAPECHELNYUK
states in the two problems. In particular, the agent’s payo↵ is supermodular in oneproblem whenever it is concave in the decision in an equivalent problem.
The rest of this section proves the equivalence of the balanced delegation and mono-tone persuasion problems, by showing that they are equivalent to a discriminatorydisclosure problem. In this problem, the agent is privately informed and has a binaryaction. The principal designs a menu of cuto↵ tests, where a cuto↵ test discloseswhether the state is below or above a cuto↵. The agent selects a test from the menuand then chooses an action.
3.2. Discriminatory Disclosure Problem. The agent chooses between actionsa = 0 and a = 1. The agent’s payo↵ u(s, t) and principal’s payo↵ v(s, t) from a = 1depend on a state s 2 [0, 1] and an agent’s private type t 2 [0, 1]; the payo↵s froma = 0 are normalized to zero. The state and type are independently and uniformlydistributed. We assume that:
(A01) u(s, t) and v(s, t) are continuous in s and t;
(A02) u(s, t) is strictly increasing in s and strictly decreasing in t.
A pair (u, v) that satisfies assumptions (A01) and (A0
2) is a primitive of this problem.
The principal designs a menu ⇧ 2 ⇧ of cuto↵ tests. Each cuto↵ test y 2 ⇧ discloseswhether the state s is at least y. The agent knows his private type t, selects a cuto↵test y from the menu ⇧, observes the result of the selected test, and then choosesbetween a = 0 and a = 1.
3.3. Equivalence to Balanced Delegation. Consider a discriminatory disclosureproblem with a primitive (u, v). A menu of cuto↵s ⇧ can be interpreted as a delegationset, and the agent’s selection of a cuto↵ y 2 ⇧ as an agent’s decision. Indeed, by(A0
2), the agent gets a higher payo↵ from a = 1 when the state s is higher; so eitherhe optimally chooses a = 1 whenever s � y, or makes a choice irrespective of thetest result. But ignoring the test result is the same as selecting an uninformative testy 2 {0, 1} ⇢ ⇧, and then choosing a = 1 whenever s � y. Therefore, without loss ofgenerality, after observing the result of the selected test, s � y or s < y, the agentchooses a = 1 if s � y and a = 0 if s < y.
Thus, the agent selects a test y 2 ⇧ that maximizes his expected payo↵,
y⇤(t,⇧) = argmax
y2⇧
Z 1
y
u(s, t)ds. (4a)
The principal’s objective is to maximize her expected payo↵,
max⇧2⇧
EZ 1
y⇤(t,⇧)
v(s, t)ds
�. (4b)
By (A02), y
⇤(t,⇧) is single-valued for almost all t, so E⇥ R 1
y⇤(t,⇧) v(s, t)ds⇤is well defined.

PERSUASION MEETS DELEGATION 9
The discriminatory disclosure problem (4a)–(4b) is a balanced delegation problem(1a)–(1b) with
UD(✓, x) =
Z 1
x
u(s, t)|t=✓
ds and VD(✓, x) =
Z 1
x
v(s, t)|t=✓
ds.
Conversely, for (UD, VD) 2 P , define (UD, VD) 2 P by
UD(✓, x) = UD(✓, x)� UD(✓, 1) and VD(✓, x) = VD(✓, x)� VD(✓, 1).
Note that, for each ⇧, the principal gets the same expected payo↵ in the balanceddelegation problem with (UD, VD) and (UD, VD), up to a constant, E[VD(✓, 1)].
The balanced delegation problem (1a)–(1b) with primitive (UD, VD) is a discriminat-ory disclosure problem (4a)–(4b) with
u(s, t) = �@UD(t, s)
@sand v(s, t) = �@VD(t, s)
@s.
Finally, (UD, VD) satisfies (A1)–(A2) if and only if (u, v) satisfies (A01)–(A
02).
3.4. Equivalence to Monotone Persuasion. Consider a discriminatory disclosureproblem with a primitive (u, v). A menu ⇧ 2 ⇧ defines a monotone partition of [0, 1].The agent’s optimal choice between a = 0 and a = 1 is the same whether he observesthe partition element µ⇧(s) or the result of the optimally selected cuto↵ test y 2 ⇧.Indeed, by (A0
2), the agent gets a higher payo↵ from a = 1 when a partition elementis higher; so he optimally chooses a = 1 whenever the partition element is at leasty 2 ⇧. Therefore, the agent behaves as if he observes the partition element µ⇧(s)that contains the state s.
Furthermore, by (A02), the agent gets a higher expected payo↵ from a = 1 when
his type t is lower; so he optimally chooses a = 1 whenever t z for some z 2[0, 1]. Therefore, without loss of generality, after observing µ⇧(s), the agent choosesa threshold type z 2 [0, 1], and then a = 1 if t z and a = 0 if t > z.
Thus, the agent chooses a threshold type z 2 [0, 1] that maximizes his expected payo↵
z⇤(s,⇧) = argmax
z2[0,1]EZ
z
0
u(s0, t)dt
���� s0 2 µ⇧(s)
�. (5a)
The principal’s objective is to maximize her expected payo↵,
max⇧2⇧
E"Z
z⇤(s,⇧)
0
v(s, t)dt
#. (5b)
By (A02), z
⇤(s,⇧) is single-valued for all s, so E⇥ R
z⇤(s,⇧)
0 v(s, t)dt⇤is well defined.
The discriminatory disclosure problem (5a)–(5b) is a monotone persuasion problem(2a)–(2b) with
UP (✓, x) =
Zx
0
u(s, t)|s=✓
dt and VP (✓, x) =
Zx
0
v(s, t)|s=✓
dt.

10 KOLOTILIN AND ZAPECHELNYUK
Conversely, for (UP , VP ) 2 P , define (UP , VP ) 2 P by
UP (✓, x) = UP (✓, x)� UP (✓, 0) and VP (✓, x) = VP (✓, x)� VP (✓, 0).
Note that, for each ⇧, the principal gets the same expected payo↵ in the monotonepersuasion problem with (UP , VP ) and (UP , VP ), up to a constant, E[VP (✓, 0)].
The monotone persuasion problem (2a)–(2b) with primitive (UP , VP ) is a discrimin-atory disclosure problem (5a)–(5b) with
u(s, t) =@UP (s, t)
@tand v(s, t) =
@VP (s, t)
@t.
Finally, (UP , VP ) satisfies (A1)–(A2) if and only if (u, v) satisfies (A01)–(A
02).
4. Application to Monopoly Regulation
We consider the classical problem of monopoly regulation as in Baron and Myerson(1982). The monopolist privately knows his cost and chooses a price to maximizeprofit. The welfare-maximizing regulator can restrict the set of prices the monopol-ist can choose from, for example, by imposing a price cap. Following Alonso andMatouschek (2008), we assume that the demand function is linear and the marginalcost has a unimodal distribution. Importantly, unlike in Baron and Myerson (1982),transfers between the monopolist and regulator are prohibited.
We study two versions of this problem: (i) with the monopolist’s participation con-straint, as in Baron and Myerson (1982) and Amador and Bagwell (2016), and (ii)without any participation constraint, as in Alonso and Matouschek (2008). We for-mulate both versions as balanced delegation problems. We then find the equivalentmonotone persuasion problems and solve them using a single result from the per-suasion literature. We show that, in both versions, the welfare-maximizing regulatorimposes a price cap, which is higher when the participation constraint is present.
4.1. Setup. The demand function is q = 1 � x where x is the price and q is thequantity demanded at this price. The cost of producing quantity q is �q. The marginalcost � 2 [0, 1] has a distribution F that admits a strictly positive, continuous, andunimodal density f .
The monopolist’s (agent’s) payo↵ is the profit
UD(�, x) = (x� �)(1� x).
The regulator’s (principal’s) payo↵ is the sum of the profit and consumer surplus,
VD(�, x) = UD(�, x) +12(1� x)2.
The regulator chooses a set of prices ⇧ ⇢ [0, 1] available to the monopolist. Themonopolist privately observes the marginal cost � and chooses a price x from ⇧ tomaximize profit UD(�, x).

PERSUASION MEETS DELEGATION 11
We first assume that the monopolist cannot be forced to operate at a loss. Formally,the monopolist can always choose to produce zero quantity, which is the same assetting price x = 1; so 1 2 ⇧.
Notice that selling at zero price gives a lower profit than not producing at all, re-gardless of the value of the marginal cost. Thus, allowing the price x = 0 does nota↵ect the monopolist’s behavior; so, without loss of generality, 0 2 ⇧. To sum up,the regulator chooses a closed set of prices ⇧ ⇢ [0, 1] that contains 0 and 1; so ⇧ 2 ⇧.
To interpret this problem as a balanced delegation problem defined in Section 2.2,we change the variable ✓ = F (�), so that ✓ is uniformly distributed on [0, 1]. Themonopolist’s and regulator’s payo↵s are now given by
UD(✓, x) = (x� F�1(✓))(1� x) and VD(✓, x) = UD(✓, x) +
12(1� x)2. (6)
4.2. Analysis. By Theorem 1, an equivalent primitive (UP , VP ) of the monotonepersuasion problem is given by5
UP (✓, x) = �Z
x
0
(1 + F�1(t)� 2✓)dt =
ZF
�1(x)
0
(2✓ � 1� �)f(�)d�,
VP (✓, x) = �Z
x
0
(F�1(t)� ✓)dt =
ZF
�1(x)
0
(✓ � �)f(�)d�,
where the set of decisions is [0, 1], the set of states is [0, 1], and the state is uniformlydistributed. In this problem, the payo↵s are linear in the state; so only the posteriormean state matters. Under this assumption on the payo↵s, optimal informationstructures are characterized in the literature (Section 5.1). We now illustrate howtools from this literature can address the monopoly regulation problem.
Let m⇧(✓) = E[✓0|✓0 2 µ⇧(✓)] be the posterior mean state induced by a partitionelement µ⇧(✓) of a monotone partition ⇧. Since UP is linear in ✓, the agent’s optimaldecision depends on µ⇧(✓) only through m⇧(✓); so x
⇤P(✓,⇧) = x
⇤(m⇧(✓)) with
x⇤(m) = argmax
x2[0,1]
ZF
�1(x)
0
(2m� 1� �)f(�)d� = F (2m� 1),
where, by convention, F (2m�1) = 0 if 2m�1 0 and F (2m�1) = 1 if 2m�1 � 1.
Since VP is linear in ✓, the principal’s expected payo↵ given µ⇧(✓) is a function ⌫ thatdepends on µ⇧(✓) only through m⇧(✓):
⌫(m) =
ZF
�1(x⇤(m))
0
(m� �)f(�)d� =
Z 2m�1
0
(m� �)f(�)d�. (7)
Thus, the principal’s objective is to maximize the expectation of ⌫,
max⇧2⇧
E⇥⌫(m⇧(✓))
⇤.
5In Appendix A.1, we provide an interpretation of this persuasion problem.

12 KOLOTILIN AND ZAPECHELNYUK
1✓⇤
⌫(m)
separating pooling
1+✓⇤
2 ✓⇤⇤
⌫(m)
separating pooling
2+✓⇤⇤
21
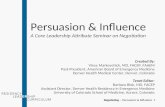
(a) With Participation Constraint (b) Without Participation Constraint
Figure 1. Optimal Monotone Partitions
The curvature of ⌫ determines the form of the optimal monotone partition. Becausethe density f is unimodal, ⌫ is S-shaped (see Figure 1(a)). Thus, the optimal mono-tone partition is an upper-censorship: the states below a cuto↵ ✓
⇤ are separated, andthe states above ✓⇤ are pooled and induce the posterior mean state equal to (1+✓
⇤)/2.
Proposition 1. Let �m 2 (0, 1) be the mode of the density f . The set ⇧⇤ = [0, ✓⇤][{1}is optimal, where ✓
⇤ 2 (�m, (1 + �m)/2) is the unique solution to
⌫
✓1 + ✓
⇤
2
◆� ⌫ (✓⇤) =
✓1 + ✓
⇤
2� ✓
⇤◆⌫0✓1 + ✓
⇤
2
◆. (8)
Since upper censorship ⇧⇤ = [0, ✓⇤] [ {1} is optimal in the monotone persuasionproblem, the same delegation set is optimal in the monopoly regulation problem.That is, the regulator imposes the price cap ✓
⇤, thus implementing the price function
x⇤(�) =
8><
>:
1+�
2 , if � < 2✓⇤ � 1,
✓⇤, if 2� 2 (✓⇤ � 1, ✓⇤),
1, if � > ✓⇤.
In words, the monopolist chooses not to participate if his marginal cost � is abovethe price cap ✓
⇤. The participating monopolist chooses his preferred price (1 + �)/2if it is below the cap, and he chooses the cap otherwise.
4.3. Analysis without Participation Constraint. We now assume that the reg-ulator can force the monopolist to operate even when making a loss. That is, the

PERSUASION MEETS DELEGATION 13
regulator can choose any set of prices, without an additional constraint to include theprice x = 1.
To interpret this problem as a balanced delegation problem defined in Section 2.2,we observe that when the price x is su�ciently high or su�ciently low, both themonopolist and regulator prefer intermediate prices. Thus, the requirement to includesu�ciently extreme prices into the delegation set is not binding.
Specifically, consider UD and VD given by (6) and defined on the domain of prices [0, 2].The regulator chooses a closed delegation set ⇧ ⇢ [0, 2]. Observe that, regardless ofthe marginal cost � 2 [0, 1], the regulator’s payo↵ is negative if x > 1 and zeroif x = 1. Therefore, an optimal delegation set ⇧⇤ must contain a price x0 2 [0, 1].Moreover, the monopolist prefers x0 to 0 and to any price x � 2. Therefore, ⇧⇤[{0, 2}implements the same price function as ⇧⇤.
We thus obtain a balanced delegation problem, up to rescaling of the monopolist’s de-cision. Using Theorem 1, we find the equivalent primitive of the monotone persuasionproblem.
For comparability, it is convenient to rescale the state in the monotone persuasionproblem, so that it is uniformly distributed on [0, 2]. Analogously to Section 4.2,the principal’s objective now is to choose a monotone partition ⇧ ⇢ [0, 2] such that{0, 2} 2 ⇧ to maximize the expectation of ⌫ given by (7) defined on [0, 2]. Because⌫ is still S-shaped (see Figure 1(b)), the optimal monotone partition is an upper-censorship: the states below a cuto↵ ✓
⇤⇤ are separated, and the states above ✓⇤⇤ are
pooled and induce the posterior mean state equal to (2 + ✓⇤⇤)/2.
Proposition 10. Let �m 2 (0, 1) be the mode of the density f . The set ⇧⇤⇤ =
[0, ✓⇤⇤] [ {2} is optimal, where ✓⇤⇤ 2 (0, (1 + �m)/2) is the unique solution to
⌫
✓2 + ✓
⇤⇤
2
◆� ⌫ (✓⇤⇤) =
✓2 + ✓
⇤⇤
2� ✓
⇤⇤◆⌫0✓2 + ✓
⇤⇤
2
◆. (9)
Proposition 10 implies that [0, ✓⇤⇤] is the optimal delegation set in the monopoly reg-ulation problem without the participation constraint. That is, the regulator imposesthe price cap ✓
⇤⇤, thus implementing the price function
x⇤⇤(�) =
(1+�
2 , if � < 2✓⇤⇤ � 1,
✓⇤⇤, if � > 2✓⇤⇤ � 1.
In words, the monopolist chooses his preferred price (1 + �)/2 if it is below the pricecap, and he chooses the cap otherwise.
4.4. Discussion. The optimal regulation policy takes the form of a price cap, re-gardless of whether the monopolist’s participation constraint is present. However,

14 KOLOTILIN AND ZAPECHELNYUK
the optimal price cap is higher when the participation constraint is present, as fol-lows from Propositions 1 and 10. Indeed, since ⌫ is concave on [(1 + �m)/2, 2] and
1 + �m
2<
1 + ✓⇤
2< 1 <
2 + ✓⇤⇤
2< 2,
the slope of ⌫ is higher at (1 + ✓⇤)/2 than at (2 + ✓
⇤⇤)/2; so (8) and (9) imply that✓⇤> ✓
⇤⇤ (see Figures 1(a) and 1(b)).
We now build the intuition for why the optimal price cap is higher when the parti-cipation constraint is present. The first-order condition (8) for the optimal price cap✓⇤ can be written as
Z✓⇤
2✓⇤�1
(✓⇤ � �)f(�)d� =1
2(1� ✓
⇤)2f(✓⇤), (80)
where the left-hand side and right-hand side correspond to the regulator’s marginalgain and marginal loss of decreasing the price cap by d✓. The gain is that themonopolist with the cost � 2 (2✓⇤ � 1, ✓⇤) now chooses the decreased price cap✓⇤ � d✓, which is closer to his cost �. The loss is that the monopolist with the cost� 2 (✓⇤ � d✓, ✓⇤) now chooses to exit.
Instead, if the regulator does not take into account that the monopolist with the costhigher than the price cap exits, then the first-order condition (9) for the price cap ✓
⇤⇤
can be written asZ
✓⇤⇤
2✓⇤⇤�1
(✓⇤⇤ � �)f(�)d� =
Z 1
✓⇤⇤(� � ✓
⇤⇤)f(�)d�. (90)
The regulator’s marginal gain here is the same. But the marginal loss is that themonopolist with the cost � 2 (✓⇤⇤, 1) chooses the decreased price cap ✓
⇤⇤ � d✓, whichis further from his cost �.
Intuitively, the marginal loss in (80) is higher than in (90), because all surplus is lostif the monopolist exits, but only a part of surplus is lost if the monopolist sets theprice further away from his cost.6 This suggests that the regulator should give morediscretion to the monopolist when she is concerned that the monopolist can exit.
5. Linear Delegation and Linear Persuasion
5.1. Setup. Consider a primitive (UD, VD) 2 P of the balanced delegation problemthat satisfies
@UD(✓, x)
@x= b(✓)� c(x) and
@VD(✓, x)
@x= d(✓)� c(x), (10)
6The right-hand side of (80) can be expressed asR 1✓⇤(� � ✓⇤)f(✓⇤)d�. This marginal loss is higher
than in (90), because f(✓⇤) > f(�) for � > ✓⇤ > �m by the unimodality of f .

PERSUASION MEETS DELEGATION 15
where b, c, and d are continuous, and b and c are strictly increasing. By Theorem 1,for each (UD, VD) 2 P that satisfies (10), an equivalent primitive (UP , VP ) 2 P of themonotone persuasion problem satisfies
@UP (✓, x)
@x= c(✓)� b(x) and
@VP (✓, x)
@x= c(✓)� d(x). (11)
Conversely, for each (UP , VP ) 2 P that satisfies (11), an equivalent primitive (UD, VD) 2P of the balanced delegation problem satisfies (10).
We call (UD, VD) and (UP , VP ) that satisfy (10) and (11) linear, because the marginalpayo↵s from a decision are linear, respectively, in a transformation of the decision,c(x), and in a transformation of the state, c(✓).
Linear delegation (albeit without the inclusion of the extreme decisions) has beenstudied by Holmstrom (1984), Melumad and Shibano (1991), Martimort and Semenov(2006), Alonso and Matouschek (2008), Goltsman, Horner, Pavlov, and Squintani(2009), Kovac and Mylovanov (2009), Amador and Bagwell (2013), and Amador,Bagwell, and Frankel (2018).7
Linear persuasion (albeit without the restriction to monotone partitions) has beenstudied by Kamenica and Gentzkow (2011), Gentzkow and Kamenica (2016), Kolo-tilin, Mylovanov, Zapechelnyuk, and Li (2017), Kolotilin (2018), and Dworczak andMartini (2019).8
It is convenient to represent a linear monotone persuasion problem as
max⇧2⇧
E⇥⌫(m⇧(✓))
⇤, (12)
for some function ⌫, where m⇧(✓) = E[c(✓0)|✓0 2 µ⇧(✓)]. We can derive ⌫ from(UP , VP ) as follows. Since UP is linear in c(✓), the agent’s optimal decision dependson µ⇧(✓) only through m⇧(✓); so x
⇤P(✓,⇧) = x
⇤(m⇧(✓)). Moreover, since VP is linearin c(✓), the principal’s expected payo↵ is a function ⌫ that depends on µ⇧(✓) onlythrough m⇧(✓),
⌫(m) = VP (m, x⇤(m)).
Conversely, for each function ⌫, a monotone persuasion problem reduces to (12) if(UP , VP ) satisfies (11) with b(x) = x, c(✓) = ✓, and d(x) = �⌫
0(x).
7Amador and Bagwell (2016) study linear delegation with a participation constraint. Despitethe same assumptions on the payo↵s, linear delegation is conceptually di↵erent from veto-baseddelegation of Krishna and Morgan (2001), Dessein (2002), and Mylovanov (2008) and from limited-commitment delegation of Kolotilin, Li, and Li (2013).
8Dworczak and Martini (2019) and Kolotilin and Li (2019) study linear monotone persuasion.Dworczak and Martini (2019) provide conditions under which monotone partitions are optimalamong all information structures. Kolotilin and Li (2019) characterize optimal monotone parti-tions when they di↵er from optimal information structures.

16 KOLOTILIN AND ZAPECHELNYUK
5.2. Optimal Linear Delegation. We now generalize and extend the existing res-ults in the literature on linear delegation, using the tools from the literature on linearpersuasion (Kolotilin, 2018, and Dworczak and Martini, 2019).
We consider a linear delegation problem where the agent’s and principal’s payo↵s aregiven by (10), the set of states is a compact interval, and the set of decisions is the realline. Without loss of generality, we rescale the state and decision so that b(✓) = ✓,where the state ✓ 2 [0, 1] has a distribution F that admits a strictly positive andcontinuous density f . For the problem to be well defined, we assume that there existthe agent’s and principal’s preferred decisions for each state. Specifically, we assumethat there exist x0
, x00 2 R such that c(x0) ✓ c(x00) and c(x0) d(✓) c(x00) for
all ✓.
In this problem, the principal chooses a compact subset ⇧ ⇢ R to maximize herexpected payo↵,
max⇧2⇧(R)
E⇥VD(✓, x
⇤D(✓,⇧))
⇤,
where ⇧(R) is the set of all compact subsets of R. As we show in Appendix A.3,this problem can be formulated as a balanced delegation problem with a su�cientlylarge compact set of decisions [y, y]. Notice that the decision is rescaled so that theprincipal chooses ⇧ 2 ⇧([y, y]) where
⇧([y, y]) = {⇧ ⇢ [y, y] : ⇧ is closed and {y, y} ⇢ ⇧}. (13)
By Theorem 1, an equivalent primitive (UP , VP ) of the monotone persuasion problemis given by
UP (✓, x) =
ZF
�1(x)
0
(c(✓)� t)f(t)dt and VP (✓, x) =
ZF
�1(x)
0
(c(✓)� d(t))f(t)dt,
where the set of decisions is [0, 1], the set of states is [y, y], and the state is uniformlydistributed. Notice that the state is rescaled so that the principal chooses a monotonepartition ⇧ 2 ⇧([y, y]).
Since UP is linear in c(✓), the agent’s optimal decision depends on µ⇧(✓) only through
m⇧(✓) = E[c(✓0)|✓0 2 µ⇧(✓)] =
8<
:{c(✓)}, if ⇡(✓) = ⇡(✓),R⇡(✓)⇡(✓) c(✓0)d✓0
⇡(✓)�⇡(✓) , if ⇡(✓) < ⇡(✓),
where ⇡(✓) and ⇡(✓) are defined in Section 2.3; so x⇤P(✓,⇧) = x
⇤(m⇧(✓)) with
x⇤(m) = argmax
x2[0,1]
ZF
�1(x)
0
(m� t)f(t)dt = F (m),
where, by convention, F (m) = 0 if m 0 and F (m) = 1 if m � 1.

PERSUASION MEETS DELEGATION 17
1c(x⇤)
0
⌫(m)p⇧⇤(m)
1c(x⇤H)0
⌫(m)
p⇧⇤(m)
c(x⇤L) c(x⇤
L)0
⌫(m)
p⇧⇤(m)
c(x⇤H) 1m⇤
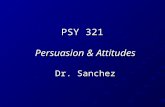
(a) Part 1 (b) Part 2 (c) Part 3
Figure 2. Three Parts in Proposition 2
Since VP is linear in c(✓), the principal’s expected payo↵ given µ⇧(✓) is a function ⌫
that depends on µ⇧(✓) only through m⇧(✓),
⌫(m) =
ZF
�1(x⇤(m))
0
(m� d(t))f(t)dt =
Zm
0
(m� d(t))f(t)dt. (14)
The next theorem verifies whether a candidate delegation set is optimal.
Theorem 2. ⇧⇤ 2 ⇧([y, y]) is optimal if p⇧⇤(m) is convex and p⇧⇤(m) � ⌫(m) forall m 2 c([y, y]), where, for all s 2 [y, y],
p⇧⇤(c(s)) = ⌫(m⇧⇤(s)) + ⌫0(m⇧⇤(s))(c(s)�m⇧⇤(s)).
Proof. Consider any ⇧ 2 ⇧([y, y]). The theorem follows from
E[⌫(m⇧⇤(s))]� E[⌫(m⇧(s))] = E[p⇧⇤(c(s))]� E[⌫(m⇧(s))]
� E[p⇧⇤(c(s))]� E[p⇧⇤(m⇧(s))]
= E[E[p⇧⇤(c(s0))]� p⇧⇤(m⇧(s))|s0 2 µ⇧(s)]] � 0,
where the first equality holds by definition of p⇧⇤ , the first inequality holds by p⇧⇤ �⌫, the second equality holds by the law of iterated expectations, and the secondinequality holds by Jensen’s inequality applied to convex p⇧⇤ . ⇤
Using Theorem 2, we find su�cient conditions under which one- or two-interval del-egation sets are optimal (see Figure 2).

18 KOLOTILIN AND ZAPECHELNYUK
Proposition 2.
1. A delegation set {x⇤} is optimal if
⌫(m) 0 for all m c(x⇤),
⌫(m) ⌫(1) +m� 1 for all m � c(x⇤),
⌫(1) + c(x⇤)� 1 = 0.
2. A delegation set [x⇤L, x
⇤H] with x
⇤L< x
⇤H
is optimal if
⌫(m) is convex on [c(x⇤L), c(x⇤
H)],
⌫(m) 0 for all m c(x⇤L) with equality at m = c(x⇤
L),
⌫(m) ⌫(1) +m� 1 for all m � c(x⇤H) with equality at m = c(x⇤
H),
⌫0(0+) � 0 if c(x⇤
L) = 0 and ⌫
0(1�) 1 if c(x⇤H) = 1.
3. A delegation set (�1, x⇤L] [ [x⇤
H,1) with x
⇤L< x
⇤H
is optimal if 9
⌫(m) is convex on (�1, c(x⇤L)] and on [c(x⇤
H),1),
⌫(m) ⌫(m⇤) + ⌫0(m⇤)(m�m
⇤) for all m 2 [c(x⇤L), c(x⇤
H)]
with equality at m = c(x⇤L) and m = c(x⇤
H),
⌫0(m⇤) � 0 if c(x⇤
L) = 0 and ⌫
0(m⇤) 1 if c(x⇤H) = 1.
where
m⇤ =
1
x⇤H� x
⇤L
Zx⇤H
x⇤L
c(s)ds.
The literature on linear delegation has focused on characterizing su�cient conditionsfor interval delegation to be optimal. The conditions in Amador and Bagwell (2013,Proposition 1) coincide with those in Proposition 2 (part 2), but we impose weakerregularity assumptions on the primitives. Amador and Bagwell (2013, Proposition 2)show that these conditions are also necessary.10
The su�cient conditions in Amador, Bagwell, and Frankel (2018, Proposition 1) fordegenerate interval delegation to be optimal coincide with those in Proposition 2 (part1), but again we impose weaker regularity assumptions on the primitives. Alonso andMatouschek (2008, Proposition 1) show that these conditions are also necessary.11
9The set of the agent’s preferred decisions is [c�1(0), c�1(1)]. Thus, delegation set (�1, x⇤L] [
[x⇤H,1) implements the same outcome as set [y⇤
L, x⇤
L] [ [x⇤
H, y⇤
H] does where y⇤
L= min{x⇤
L, c�1(0)}
and y⇤H
= max{x⇤H, c�1(1)}.
10Alonso and Matouschek (2008, Propositions 3, 6, 7) also show the necessity and su�ciency ofthese conditions but only for quadratic payo↵s (c(x) = x).
11They show the necessity only for quadratic payo↵s (c(x) = x), but we can use their argument toshow the necessity for non-quadratic payo↵s. To this end, suppose first that there exists m0 < c(x⇤)
such that ⌫(m0) > 0 and let x0 < x⇤ be such thatRx⇤
x0 c(s)ds = (x⇤�x0)m0. The principal’s expectedpayo↵ is larger by (x⇤ � x0)⌫(m0) > 0 for delegation set {x0, x⇤} than for {x⇤}. The case in whichthere exists m0 > c(x⇤) such that ⌫(m0) > ⌫(1) +m0 � 1 is similar and omitted.

PERSUASION MEETS DELEGATION 19
The su�cient conditions in Proposition 2 (part 3) for two-interval delegation to beoptimal are novel. This result implies Melumad and Shibano (1991, Proposition 4)and Alonso and Matouschek (2008, Result 6).
Using Proposition 2, we now characterize optimal delegation sets in prominent cases.
Proposition 3.
1 (convex). If ⌫(m) is convex on [0, 1], then there exist x⇤L x
⇤H
such that delegationset [x⇤
L, x
⇤H] is optimal.
2 (concave). If ⌫(m) is concave on [0, 1], then there exist x⇤L x
⇤Hsuch that delegation
set {x⇤L, x
⇤H} is optimal.
3 (convex-concave). If ⌫(m) is convex on [0, m] and concave on [m, 1] for some0 < m < 1, then there exist x⇤
L x
⇤M
x⇤H
such that delegation set [x⇤L, x
⇤M] [ {x⇤
H}
is optimal.
4 (concave-convex). If ⌫(m) is concave on [0, m] and convex on [m, 1] for some0 < m < 1, then there exist x⇤
L x
⇤M
x⇤H
such that delegation set {x⇤L} [ [x⇤
M, x
⇤H]
is optimal.
Amador, Bagwell, and Frankel (2018, Proposition 2) coincides with Proposition 3(part 1), but again we impose weaker regularity assumptions on the primitives. Mar-timort and Semenov (2006) assume that d(x) = x+ � and f(✓)� �f
0(✓) � 0, so that⌫ is convex on [0, 1].
Parts 2–4 in Proposition 3 are novel. Melumad and Shibano (1991) assume uniformdensity f(✓) = 1 and constant slope d
0(x) = k > 0, so that ⌫ is convex on [0, 1] ifk < 2 and concave on [0, 1] if k > 2. In the monopoly regulation problem of Section 4,⌫ is convex-concave on [0, 1] because f is unimodal, but ⌫ would be concave-convexon [0, 1] if f was uniantimodal.
Finally, we comment on the limits of the tools from the persuasion literature for thedelegation problem. The persuasion literature studies optimal information structureswithout the restriction to monotone partitions. Under the conditions in Theorem 2,the set ⇧ is optimal among all information structures. These conditions are not ne-cessary, because ⇧ may be optimal among monotone partitions, but not among allinformation structures. However, as shown by Dworczak and Martini (2019, The-orem 3), these conditions become necessary if ⌫ is a�ne-closed (intuitively, if it hasat most one interior peak). Even when optimal information structures are not mono-tone partitions, it may be possible to characterize optimal monotone partitions usingtools from Kolotilin and Li (2019).
5.3. Optimal Linear Delegation with Participation Constraint. We now con-sider a linear delegation problem from Section 5.2 with the only di↵erence that theset of decisions is [x0,1) and the decision x0 must always be permitted by the prin-cipal. We assume that c(x0) 0 and that there exists x00
> x0 such that ✓ c(x00)

20 KOLOTILIN AND ZAPECHELNYUK
and d(✓) c(x00) for all ✓ 2 [0, 1]. As follows from Appendix A.3, this problem canbe formulated as a balanced delegation problem with a su�ciently large compact setof decisions [x0, y]. That is, the principal chooses ⇧ 2 ⇧([x0, y]) to maximize theexpectation of ⌫ given by (14). Thus, Theorem 2 continues to hold with y = x0.
As an illustration, we use Theorem 2 to find su�cient conditions under which anoptimal delegation set takes the form of a floor on the decisions.
Proposition 20. A delegation set {x0} [ [x⇤
,1) with x⇤ � x0 is optimal if
⌫(m) is convex on [c(x⇤),1),
⌫(m) ⌫(m⇤) + ⌫0(m⇤)(m�m
⇤) for all m 2 [c(x0), c(x⇤)] with equality at m = c(x⇤),
⌫0(0+) � 0 if c(x⇤) = 0 and ⌫
0(1�) 1 if c(x⇤) = 1,
where
m⇤ =
(c(x0), if x⇤ = x0,
1x⇤�x0
Rx⇤
x0c(s)ds, if x⇤
> x0.
Proposition 20 can be used to derive conditions for a price cap (equivalently, a quantityfloor) to be optimal in a monopoly regulation problem of Section 4 with more generalprimitives specified as follows. The inverse demand function is P (q). The marginalcost � 2 [�, �], with 0 � < � < 1, has a strictly positive and continuous density.The regulator’s payo↵ is a weighted sum, with weights � 2 (0, 1) and 1 � �, of theprofit and consumer surplus,
V (�, q) = �(P (q)� �)q + (1� �)
✓Zq
0
P (s)ds� P (q)q
◆.
We assume that the monopolist can always choose to produce zero quantity (exit).
The regulator’s problem reduces to a balanced delegation problem in which the reg-ulator chooses a set of quantities ⇧ 2 ⇧([0, q]), where P (q) �, available to themonopolist. Up to rescaling of the state and decision, all assumptions imposed inthis section are satisfied in each of the following three cases:
1. P (q) = A� B ln q with A 2 R and B > 0;
2. P (q) = A� BqC with A > 0, B > 0, and C > 0;
3. P (q) = A� BqC with A < �, B < 0, and C 2 (�1, 0).
For each of these cases, Proposition 20 gives su�cient conditions on the cost distribu-tion, demand parameters, and payo↵ weights for price-cap regulation to be optimal.These conditions can be compared with those in Amador and Bagwell (2016) whoconsider a similar setting but focus on delegation sets under which the monopolistnever chooses to exit.

PERSUASION MEETS DELEGATION 21
6. General Equivalence
We now generalize Theorem 1. We assume that the marginal payo↵s are integrableand single crossing, rather than continuous and monotone. We then discuss how thisresult can be used to deal with arbitrary distributions of the state, which may haveatoms and zero density.
6.1. Primitives. We first define single crossing properties. A function �(yi, y�i)satisfies
(i) upcrossing in yi if, for each y�i,
�(y0i, y�i) � (>) 0 =) �(y00
i, y�i) � (>) 0 whenever y00
i> y
0i;
(ii) aggregate upcrossing in yi if, for each distribution H of y�i,Z
�(y0i, y�i)dH(y�i) � (>) 0 =)
Z�(y00
i, y�i)dH(y�i) � (>) 0 whenever y00
i> y
0i;
(iii) downcrossing (aggregate downcrossing) in yi if ��(yi, y�i) satisfies upcrossing(aggregate upcrossing) in yi.
12
The agent’s payo↵ U(✓, x) and the principal’s payo↵ V (✓, x) depend on a decisionx 2 [0, 1] and a state ✓ 2 [0, 1]. The state is uniformly distributed. We assume that
(A1) U(✓, x) and V (✓, x) are absolutely continuous in x; @
@xU(✓, x) and @
@xV (✓, x) are
integrable in ✓.
In addition, for the balanced delegation problem, we assume that
(AD
2 )@
@xU(✓, x) satisfies downcrossing in x and aggregate upcrossing in ✓;
for the monotone persuasion problem, we assume that
(AP
2 )@
@xU(✓, x) satisfies upcrossing in ✓ and aggregate downcrossing in x.
The balanced delegation and monotone persuasion problems are defined as in Section2. But, unlike in Section 2, the agent’s optimal correspondences x⇤
D(✓,⇧) and x
⇤P(✓,⇧)
may not be single-valued. Depending on which optimal decisions are selected by theagent, the principal can obtain di↵erent expected payo↵s. Denote by
E⇥VD(✓, x
⇤D(✓,⇧))
⇤and E
⇥VP (✓, x
⇤P(✓,⇧))
⇤
the sets of the principal’s expected payo↵s resulting from all integrable selections fromthe correspondences x⇤
D(✓,⇧) and x
⇤P(✓,⇧) (Aumann, 1965).
12Quah and Strulovici (2012) characterize conditions for aggregate single crossing. In particular,�(yi, y�i) satisfies aggregate single crossing in yi if �(yi, y�i) is monotone in yi.

22 KOLOTILIN AND ZAPECHELNYUK
6.2. Equivalence. Let PD be the set of all primitives (UD, VD) that satisfy assump-tions (A1) and (AD
2 ), and let PP be the set of all primitives (UP , VP ) that satisfyassumptions (A1) and (AP
2 ).
Primitives (UD, VD) 2 PD and (UP , VP ) 2 PP are equivalent if there exist ↵ > 0 and� 2 R such that
E⇥VD(✓, x
⇤D(✓,⇧))
⇤= ↵E
⇥VP (✓, x
⇤P(✓,⇧))
⇤+ � for all ⇧ 2 ⇧.
That is, if (UD, VD) and (UP , VP ) are equivalent, then, in both problems, the principalgets the same sets of expected payo↵s, up to an a�ne transformation, for each ⇧.
Theorem 10. For each (UD, VD) 2 PD, an equivalent (UP , VP ) 2 PP is given by (3a).
Conversely, for each (UP , VP ) 2 PP , an equivalent (UD, VD) 2 PD is given by (3b).
The principal’s set of expected payo↵s is a singleton for each ⇧ (and thus the prin-cipal’s maximization problem is well defined) if the optimal correspondence is single-valued for almost all ✓. This property holds in the delegation problem if @
@xUD(✓, x)
satisfies strict aggregate upcrossing in ✓. Similarly, this property holds in the persua-sion problem if @
@xUP (✓, x) satisfies strict aggregate downcrossing in x.
Alternatively, the principal’s maximization problem can be defined by specifying aselection rule from the agent’s optimal correspondence, such as the max rule (wherethe agent chooses the principal’s most preferred decision) or the min rule (where theagent chooses the principal’s least preferred decision).
6.3. General Distributions. Consider a balanced delegation or monotone persua-sion problem with the state ! 2 [!,!] that has a distribution F (possibly, with atomsand zero density). To apply Theorem 10, we redefine the state to be ✓ uniformly dis-tributed on [0, 1], and define ! = F
�1(✓), where F�1(✓) = inf{! 2 [!,!] : ✓ F (!)}is the quantile function.
With this change of variable, atoms in F translate into intervals where @
@xU(F�1(✓), x)
and @
@xV (F�1(✓), x) are constant in ✓; zero-density intervals in F translate into points
where @
@xUD(F�1(✓), x) and @
@xVD(F�1(✓), x) have simple discontinuities in ✓. This
change of variable preserves both integrability in ✓ assumed in (A1) and single-crossingin ✓ assumed in (AD
2 )/(AP
2 ).
For the case of atomless distributions with a strictly positive density, Theorem 10 canbe conveniently expressed as follows. Let UD(!D, x) and VD(!D, x) satisfy assump-tions (A1) and (AD
2 ), and let UP (!P , x) and VP (!P , x) satisfy assumptions (A1) and(AP
2 ). Suppose that !D 2 [0, 1] and !P 2 [0, 1] are distributed with strictly positivedensities fD and fP . Applying Theorem 10 to the primitives with redefined states,and changing states back to !D and !P , we obtain that (UD, VD) and (UP , VP ) are

PERSUASION MEETS DELEGATION 23
equivalent if, for all !D,!P 2 [0, 1],
@UD(!D, x)
@x
����x=!P
fD(!D) = � @UP (!P , x)
@x
����x=!D
fP (!P ),
@VD(!D, x)
@x
����x=!P
fD(!D) = � @VP (!P , x)
@x
����x=!D
fP (!P ).
To illustrate how Theorem 10 applies when F has atoms, consider the example inKamenica and Gentzkow (2011, p. 2591) in which a prosecutor (principal) persuadesa judge (agent) to convict a suspect. The suspect is innocent (! = 0) with probability0.7 and guilty (! = 1) with probability 0.3, so that the distribution of ! is
F (!) =
(0.7, if ! 2 [0, 1),
1, if ! = 1.
The prosecutor’s preferred decision is to convict the suspect irrespective of the state,whereas the judge’s preferred decision is to convict the suspect whenever his posteriorthat the suspect is guilty is at least 1/2,
VP (!, x) = x and UP (!, x) = (! � 1/2)x,
where !, x 2 [0, 1]. Substituting ! = F�1(✓) yields
VP (✓, x) = x and UP (✓, x) =
(�x/2, if ✓ 2 [0, 0.7),
x/2, if ✓ 2 [0.7, 1].
Clearly, (UP , VP ) 2 PP . By Theorem 10, an equivalent primitive (UD, VD) 2 PD ofthe balanced delegation problem is given by
VD(✓, x) = 1� x and UD(✓, x) =
((x� 0.4)/2, if x 2 [0, 0.7),
(1� x)/2, if x 2 [0.7, 1].
Assume that the agent breaks ties in favor of the principal. It is easy to see that theoptimal balanced delegation set is ⇧⇤ = {0, 0.4, 1}, so that the agent is indi↵erentbetween x = 0.4 and x = 1 and thus chooses the principal’s preferred decision,x⇤ = 0.4. The principal’s optimal expected payo↵ is 1� x
⇤ = 0.6.
Let us interpret the solution ⇧⇤ = {0, 0.4, 1} within the persuasion problem. Whenthe state ✓ belongs to the partition element [0, 0.4), the posterior is that ! = F
�1(✓) =0 with probability one, so the judge acquits the suspect. When the state ✓ belongs tothe partition element [0.4, 1), the posterior is that ! = F
�1(✓) = 0 with probability1/2, when ✓ 2 [0.4, 0.7), and ! = F
�1(✓) = 1 with probability 1/2, when ✓ 2 [0.7, 1).So, the judge is indi↵erent between convicting and acquiting, and thus convicts thesuspect. The prosecutor’s expected payo↵ is 0.6, and ⇧⇤ is the optimal informationstructure derived in Kamenica and Gentzkow (2011, p. 2591).

24 KOLOTILIN AND ZAPECHELNYUK
7. Concluding Remarks
We have shown the equivalence of balanced delegation and monotone persuasion,with the upshot that insights in delegation can be used for better understanding ofpersuasion, and vice versa. For instance, persuasion as the design of a distributionof posterior beliefs is notoriously hard to explain to a non-specialized audience. Theconnection to delegation can thus be instrumental in relaying technical results fromthe persuasion literature to practitioners and policy makers.
We have used the tools from the literature on linear persuasion to obtain new res-ults on linear delegation. Amador and Bagwell (2013) have developed a Lagrangianmethod to derive su�cient conditions for the optimality of interval delegation in anonlinear delegation problem. This method may be useful for deriving conditions forthe optimality of interval persuasion in an equivalent nonlinear persuasion problem.
The classical delegation and persuasion problems have numerous extensions, which in-clude a privately informed principal, competing principals, multiple agents, repeatedinteractions, and multidimensional state and decision spaces. We hope that our equi-valence result will be a starting point for studying the connection between delegationand persuasion in these extensions.
It may be interesting to compare the values of delegation and persuasion in a givenproblem. This comparison can be made by recasting the persuasion problem as anequivalent delegation problem and then directly comparing the solutions and valuesof these two delegation problems.
Naturally, a principal may wish to influence an agent’s decision by a combination ofpersuasion and delegation instruments. How to optimally control both informationand decisions of the agent, how these instruments interact, and whether they aresubstitutes or complements are important questions that are left for future research.
Appendix
A.1. Interpretation of Persuasion Problem. In Section 4, we have expressedthe monopoly regulation problem as a balanced delegation problem and derived anequivalent monotone persuasion problem. The primitive of this problem, up to amultiplicative constant, is
UP (✓, x) =1
2
Zx
0
(2✓ � 1� F�1(�))d� and VP (✓, x) =
Zx
0
(✓ � F�1(�))d�. (15)
We now provide an interpretation of this problem.
A producer (agent) chooses a quantity x to produce. He faces uncertainty about anexogenous price ✓ that is uniformly distributed on [0, 1]. The producer’s payo↵ is
UP (✓, x) = ✓x� C(x), (16)

PERSUASION MEETS DELEGATION 25
where C(x) is the producer’s cost function. A government agency (principal) candisclose information about the price to the producer. The agency’s payo↵ is
VD(✓, x) = ✓x�D(x), (17)
where isD(x) is the social cost function. The di↵erence, C(x)�D(x), is the producer’sexternality. The agency chooses ⇧ 2 ⇧. The producer observes the partition elementµ⇧(✓) that contains the price ✓ and chooses a quantity x that maximizes his expectedpayo↵ given the posterior belief about the price.
Observe that the payo↵s (16)–(17) are the same as (15) if
C(x) =
Zx
0
1 + F�1(�)
2d� and D(x) =
Zx
0
F�1(�)d�.
Both cost functions C and D are convex, since F�1 is increasing. Notice that C(x)�D(x) > 0 for all x > 0. So, in this problem, we have a positive externality, where thesocial cost is smaller than the producer’s cost.
A.2. Proof of Propositions 1 and 10. The derivative of ⌫(m) is
⌫0(m) = 2(1�m)f(2m� 1) +
Z 2m�1
0
f(�)d�.
First, we show that ⌫(m) is S-shaped (that is, ⌫ 0 is single-peaked with an interiorpeak) when the density f is unimodal.
Lemma 1. Let �m 2 (0, 1) be the mode of the density f . Then, ⌫(m) is convex on(�1, (1 + �m)/2] (strictly so on [1/2, (1 + �m)/2]) and concave on [(1 + �m)/2,1)(strictly so on [(1 + �m)/2, 1]).
Proof. For any m1,m2,
⌫0(m2)� ⌫
0(m1) = 2(1�m2)[f(2m2 � 1)� f(2m1 � 1)]
+
Z 2m2�1
2m1�1
[f(�)� f(2m1 � 1)]d�.
Thus, if m1 < m2 (1 + �m)/2, then ⌫0(m2) � ⌫
0(m1), because f(2m � 1) isincreasing for m 2 (�1, (1+�m)/2]. Moreover, if 1/2 m1 < m2 (1+�m)/2, then⌫0(m2) > ⌫
0(m1), because f(2m � 1) is strictly increasing for m 2 [1/2, (1 + �m)/2].Similarly, if (1 + �m)/2 m1 < m2, then ⌫
0(m2) ⌫0(m1), because f(2m � 1) is
decreasing for m 2 [(1 + �m)/2,1). Moreover, if (1 + �m)/2 m1 < m2 1, then⌫0(m2) < ⌫
0(m1), because f(2m� 1) is strictly decreasing for m 2 [(1+ �m)/2, 1]. ⇤
Propositions 1 and 10 are special cases of Lemma 2.

26 KOLOTILIN AND ZAPECHELNYUK
Lemma 2. Let �m 2 (0, 1) be the mode of the density f , and let ✓ be uniformlydistributed on [0, ✓] with ✓ � 1. The set ⇧? = [0, ✓?] [ {✓} is optimal, where ✓
? 2�max
�0, 1 + �m � ✓
, (1 + �m)/2
�is the unique solution to
⌫
✓✓ + ✓
?
2
◆� ⌫ (✓?) =
✓✓ + ✓
?
2� ✓
?
◆⌫0✓✓ + ✓
?
2
◆. (18)
Proof. It is straightforward to show (see Figures 1(a) and 1(b)) that there exists aunique solution ✓
? to (18) with
1� E[✓] ✓?<
1 + �m
2<
✓ + ✓?
2.
We now use Theorem 2 in Section 5 to verify that ⇧? is optimal. For ⇧? = [0, ✓?][{✓},we have
p⇧?(m) =
(⌫(m), if m < ✓
?,
⌫
⇣✓+✓
?
2
⌘+⇣m� ✓+✓
?
2
⌘⌫0⇣
✓+✓?
2
⌘, if m � ✓
?.
Figures 1(a) and 1(b) show p⇧? as a dashed red curve. It is straightforward to verifythat p⇧?(m) is convex and p⇧?(m) � ⌫(m) for all m 2 [0, ✓]. Thus, ⇧? is optimal byTheorem 2. ⇤
A.3. Standard Delegation. Consider a delegation problem in which the set ofstates is ⇥ = [✓, ✓] and the set of decisions is the real line. The principal chooses⇧ 2 ⇧(R), where ⇧(R) is the set of all compact subsets of R. Payo↵s UD and VD
satisfy assumptions (A1) and (AD
2 ). In addition, we assume that
(A3) sup✓2⇥
UD(✓, x) ! �1 and sup✓2⇥
VD(✓, x) ! �1 as x ! ±1.
Note that (A1), (AD
2 ), and (A3) are satisfied in the linear delegation problem inSection 5.
We now show that this problem can be formulated as a balanced delegation problem,up to rescaling of the decision, in which the principal chooses ⇧ 2 ⇧([y, y]) given by(13) for a su�ciently large compact set [y, y].
Lemma 3. There exists an interval [x, x] such that, for each y < x and each y > x,
max⇧2⇧([y,y])
E⇥VD(✓, x
⇤D(✓,⇧))
⇤= max
⇧2⇧(R)E⇥VD(✓, x
⇤D(✓,⇧))
⇤.
Proof. Consider z0 2 R. Let V0 be the principal’s expected payo↵ if ⇧ = {z0},V0 = E[VD(✓, z0)].
Let
Z =
⇢x 2 R : sup
✓2⇥VD(✓, x) � V0
�.

PERSUASION MEETS DELEGATION 27
Note that Z is nonempty because z0 2 Z, and it is bounded by (A3). Let z = inf Zand z = supZ. Clearly, for each ⇧ 2 ⇧(R),
⇧ \ [z, z] = ? =) E⇥VD(✓, x
⇤D(✓,⇧))
⇤< V0,
so an optimal ⇧⇤ 2 ⇧(R) must have a nonempty intersection with [z, z].
Next, we say that y 2 R is dominated by [z, z] if the agent strictly prefers any decisionin [z, z] to y,
minz2[z,z]
UD(✓, z)� UD(✓, y) > 0 for all ✓ 2 ⇥.
By (A1) and (AD
2 , downcrossing in x),
minz2[z,z]
UD(✓, z) = min{UD(✓, z), UD(✓, z)}. (19)
By (A1) and (AD
2 , aggregate upcrossing in ✓),
UD(✓, z)� UD(✓, y) =
Zz
y
@
@xUD(✓, x)dx > 0 for all ✓ 2 [✓, ✓]
if and only if(UD(✓, z)� UD(✓, y) > 0 if z > y,
UD(✓, z)� UD(✓, y) > 0 if z < y.(20)
Let X be the set of all x 2 R that are not dominated by [z, z]. If x 2 [z, z], then,trivially, x 2 X. If x < z, then, by (19) and (20),
x 2 X () UD(✓, x) � min{UD(✓, z), UD(✓, z)}.
If x > z, then, by (19) and (20),
x 2 X () UD(✓, x) � min{UD(✓, z), UD(✓, z)}.
Thus, [z, z] ⇢ X and, by (A3), X is bounded.
So, we have obtained that (i) if ⇧⇤ is optimal, then it has a nonempty intersection with[z, z], and (ii) any decision x 62 X is dominated by [z, z]. Given that ⇧⇤ \ [z, z] 6= ?,adding or removing any decisions outside of X does not a↵ect the agent’s behavior,
x⇤D(✓,⇧⇤) = x
⇤D(✓,⇧⇤ [ Y ) = x
⇤D(✓,⇧⇤\Y ) for all ✓ and Y ⇢ R\X.
Hence, for each y < minX and each y > maxX,
E⇥VD(✓, x
⇤D(✓,⇧⇤))
⇤= E
⇥VD(✓, x
⇤D(✓,⇧⇤ \ [y, y] [ {y, y}))
⇤. ⇤

28 KOLOTILIN AND ZAPECHELNYUK
A.4. Proof of Proposition 2.
1. For ⇧⇤ = {x⇤, y, y}, we have
p⇧⇤(m) =
(⌫(m⇤
L) + ⌫
0(m⇤L)(m�m
⇤L), if m < c(x⇤),
⌫(m⇤H) + ⌫
0(m⇤H)(m�m
⇤H), if m � c(x⇤),
where
m⇤L= E[c(s)|s < x
⇤] and m⇤H= E[c(s)|s � x
⇤].
As shown in Appendix A.3, y is su�ciently small and y is su�ciently large, such that
m⇤L=
Rx⇤
yc(s)ds
x⇤ � y=
Rx0
yc(s)ds+
Rx⇤
x0 c(s)ds
x0 � y + x⇤ � x0 < 0,
m⇤H=
Ry
x⇤ c(s)ds
y � x⇤ =
Rx00
x⇤ c(s)ds+R
y
x00 c(s)ds
x00 � x⇤ + y � x00 > 1,
where the first inequality holds because c(x) < 0 for x < x0 and y ⌧ x
0 and thesecond inequality holds because c(x) > 1 for x > x
00 and y � x00.
Thus, taking into account (14), we have
p⇧⇤(m) =
(0, if m < c(x⇤),
⌫(1) +m� 1, if m � c(x⇤).
Figure 2(a) shows p⇧⇤ as a dashed red curve. The conditions imply that p⇧⇤ is convexand p⇧⇤ � ⌫; so ⇧⇤ is optimal by Theorem 2.
2. For ⇧⇤ = [x⇤L, x
⇤H] [ {y, y}, we have
p⇧⇤(m) =
8><
>:
⌫(m⇤L) + ⌫
0(m⇤L)(m�m
⇤L), if m < c(x⇤
L),
⌫(m), if m 2 [c(x⇤L), c(x⇤
H)),
⌫(m⇤H) + ⌫
0(m⇤H)(m�m
⇤H), if m � c(x⇤
H),
where
m⇤L= E[c(s)|s < x
⇤L] and m
⇤H= E[c(s)|s � x
⇤H].
As shown in Appendix A.3, y is su�ciently small and y is su�ciently large, such that
m⇤L=
Rx⇤L
yc(s)ds
x⇤L� y
=
Rx0
yc(s)ds+
Rx⇤L
x0 c(s)ds
x0 � y + x⇤L� x0 < 0,
m⇤H=
Ry
x⇤H
c(s)ds
y � x⇤H
=
Rx00
x⇤H
c(s)ds+R
y
x00 c(s)ds
x00 � x⇤H+ y � x00 > 1,
where the first inequality holds because c(x) < 0 for x < x0 and y ⌧ x
0 and thesecond inequality holds because c(x) > 1 for x > x
00 and y � x00.

PERSUASION MEETS DELEGATION 29
Thus, taking into account (14), we have
p⇧⇤(m) =
8><
>:
0, if m < c(x⇤L),
⌫(m), if m 2 [c(x⇤L), c(x⇤
H)),
⌫(1) +m� 1, if m � c(x⇤L).
Figure 2(b) shows p⇧⇤ as a dashed red curve. The conditions imply that p⇧⇤ is convexand p⇧⇤ � ⌫; so ⇧⇤ is optimal by Theorem 2. In particular, if c(x⇤
L) 2 (0, 1), then
p⇧⇤(m) is convex at m = c(x⇤L) because ⌫(m) is di↵erentiable at all m 2 (0, 1), by
(14). Moreover, if c(x⇤L) = 0, then p⇧⇤(m) is convex at m = 0 because ⌫(m) is convex
at m = 0, by the last line in the conditions. By the same argument, p⇧⇤(m) is convexat m = c(x⇤
H).
3. For ⇧⇤ = [y, x⇤L] [ [x⇤
H, y], we have
p⇧⇤(m) =
8><
>:
⌫(m), if m < c(x⇤L),
⌫(m⇤) + ⌫0(m⇤)(m�m
⇤), if m 2 [c(x⇤L), c(x⇤
H)),
⌫(m), if m � c(x⇤H).
Figure 2(c) shows p⇧⇤ as a dashed red curve. The conditions imply that p⇧⇤ is convexand p⇧⇤ � ⌫; so ⇧⇤ is optimal by Theorem 2. As in part 2, the last line in theconditions verifies that p⇧⇤(m) is convex at m = c(x⇤
L) and at m = c(x⇤
H) if ⌫(m) is
not di↵erentiable at these points.
A.5. Proof of Proposition 3. The proof is straightforward but tedious. We onlysummarize possible cases. The reader may refer to the corresponding figures forguidance.
1. There are 4 cases (see Figure 3).
(a) If ⌫ 0(0+) � 0 and ⌫0(1�) 1, then ⇧⇤ = [y, y].
(b) If ⌫ 0(0+) � 0 and ⌫0(1�) > 1, then ⇧⇤ = [y, x⇤
H] [ {y} with c(x⇤
H) 1.
(c) If ⌫ 0(0+) < 0 and ⌫0(1�) 1, then ⇧⇤ = [x⇤
L, y] [ {y} with c(x⇤
L) � 0.
(d) If ⌫ 0(0+) < 0 and ⌫0(1�) > 1, then ⇧⇤ = [x⇤
L, x
⇤H] [ {y, y} with 0 c(x⇤
L)
c(x⇤H) 1.
2. There are 3 cases (see Figure 4).
(a) If ⌫ 0(0+) > 0 and ⌫0(1�) < 1, then ⇧⇤ = {x⇤
L, x
⇤H, y, y} with c(x⇤
L) 0 and
c(x⇤H) � 1.
(b) If ⌫ 0(0+) 0, then ⇧⇤ = {x⇤H, y, y} with c(x⇤
H) � 1.
(c) If ⌫ 0(1�) � 1, then ⇧⇤ = {x⇤L, y, y} with c(x⇤
L) 0.
3. There are 4 cases (see Figure 5).
(a) If ⌫ 0(0+) � 0 and ⌫0(1�) � 1, then ⇧⇤ = [y, x⇤
M] [ {y} with c(x⇤
M) m.

30 KOLOTILIN AND ZAPECHELNYUK
10
⌫(m)
p⇧⇤(m)
1c(x⇤H)0
⌫(m)
p⇧⇤(m)
(a) (b)
1c(x⇤L)0
⌫(m)p⇧⇤(m)
1c(x⇤H)0
⌫(m)
p⇧⇤(m)
c(x⇤L)
(c) (d)
Figure 3. Four Cases in Proposition 3 (Part 1)
0 1c(x⇤L) c(x⇤
H)
0 1c(x⇤
H) 0 1c(x⇤
L)
(a) (b) (c)
Figure 4. Three Cases in Proposition 3 (Part 2)

PERSUASION MEETS DELEGATION 31
0 1c(x⇤M) 0 1c(x⇤
M) c(x⇤
H)
(a) (b)
0 1c(x⇤L) c(x⇤
M) 0 1c(x⇤
L) c(x⇤
H)c(x⇤
M)
(c) (d)
Figure 5. Four Cases in Proposition 3 (Part 3)
(b) If ⌫ 0(0+) � 0 and ⌫0(1�) < 1, then ⇧⇤ = [y, x⇤
M] [ {x⇤
H, y} with c(x⇤
M) m and
c(x⇤H) � 1.
(c) If ⌫ 0(0+) < 0 and ⌫0(1�) � 1, then ⇧⇤ = [x⇤
L, x
⇤M] [ {y, y} with 0 c(x⇤
L)
c(x⇤M) m.
(d) If ⌫ 0(0+) < 0 and ⌫0(1�) < 1, then ⇧⇤ = [x⇤
L, x
⇤M] [ {x⇤
H, y, y} with 0 c(x⇤
L)
c(x⇤M) m and c(x⇤
H) � 1.
4. There are 4 cases analogous to those in part 3.
(a) If ⌫ 0(0+) 0 and ⌫0(1�) � 1, then ⇧⇤ = [x⇤
M, y] [ {y} with c(x⇤
M) � m.
(b) If ⌫ 0(0+) > 0 and ⌫0(1�) � 1, then ⇧⇤ = [x⇤
M, y] [ {x⇤
L, y} with c(x⇤
M) � m and
c(x⇤L) 0.
(c) If ⌫ 0(0+) 0 and ⌫0(1�) > 1, then ⇧⇤ = [x⇤
M, x
⇤H] [ {y, y} with 1 � c(x⇤
H) �
c(x⇤M) � m.

32 KOLOTILIN AND ZAPECHELNYUK
(d) If ⌫ 0(0+) > 0 and ⌫0(1�) < 1, then ⇧⇤ = [x⇤
M, x
⇤H] [ {x⇤
L, y, y} with 1 � c(x⇤
H) �
c(x⇤M) � m and c(x⇤
L) 0.
A.6. Proof of Proposition 20. For ⇧⇤ = {x0} [ [x⇤
, y], we have
p⇧⇤(m) =
(⌫(m⇤) + ⌫
0(m⇤)(m�m⇤), if m 2 [c(x0), c(x⇤)),
⌫(m), if m � c(x⇤).
The conditions imply that p⇧⇤ is convex and p⇧⇤ � ⌫; so ⇧⇤ is optimal by Theorem 2.As in Proposition 2, the last line in the conditions verifies that p⇧⇤(m) is convex atm = c(x⇤) if ⌫(m) is not di↵erentiable at this point.
A.7. Proof of Theorem 10. Consider (UD, VD) 2 PD and (UP , VP ) 2 PP that satisfy
@UD(t, x)
@x
����x=s
= � @UP (s, x)
@x
����x=t
and@VD(t, x)
@x
����x=s
= � @VP (s, x)
@x
����x=t
(21)
for all s, t 2 [0, 1]. It su�ces to prove that there exists a constant � 2 R such that
E⇥VD(✓, x
⇤D(✓,⇧))
⇤= E
⇥VP (✓, x
⇤P(✓,⇧))
⇤+ � for all ⇧ 2 ⇧.
Consider ⇧ 2 ⇧ and let s be uniformly distributed on [0, 1]. Define
u⇧(s, t) = E@UP (s0, t)
@t
���� s0 2 µ⇧(s)
�= E
�@UD(t, s0)
@s0
���� s0 2 µ⇧(s)
�,
v⇧(s, t) = E@VP (s0, t)
@t
���� s0 2 µ⇧(s)
�= E
�@VD(t, s0)
@s0
���� s0 2 µ⇧(s)
�.
Note that u⇧(s, t) is integrable in s and t by (A1) and satisfies upcrossing in s anddowncrossing in t by (AD
2 )/(AP
2 ).
First, consider the balanced delegation problem. By (21), we have, for s 2 ⇧,
UD(t, s) = UD(t, 1)�Z 1
s
@UD(t, x)
@x
����x=s0
ds0 = UD(t, 1) +
Z 1
s
u⇧(s0, t)ds0,
VD(t, s) = VD(t, 1)�Z 1
s
@VD(t, x)
@x
����x=s0
ds0 = VD(t, 1) +
Z 1
s
v⇧(s0, t)ds0.
Since u⇧(s, t) satisfies upcrossing in s, we have
s 2 y⇤(t,⇧) = argmax
y2⇧
Z 1
y
u⇧(s, t)ds
if and only if for all s0, s00 2 ⇧ such that s0 s s00 we have u⇧(s0, t) 0 u⇧(s00, t).

PERSUASION MEETS DELEGATION 33
The principal’s expected payo↵ is
E⇥VD(t, x
⇤D(t,⇧))
⇤= E[VD(t, 1)] + E[VD(t, y
⇤(t,⇧))]
= E[VD(t, 1)] +
Z 1
0
Z 1
y⇤(t,⇧)
v⇧(s, t)dsdt.
Define
J⇧ = {(s, t) 2 [0, 1]2 : u⇧(s, t) � 0} and J+⇧ = {(s, t) 2 [0, 1]2 : u⇧(s, t) > 0},
J⇧ = {J ⇢ [0, 1]2 : J+⇧ ⇢ J ⇢ J⇧, and J is Lebesgue measurable}.
Using Aumann (1965, Theorem 1), we have
E⇥VD(t, x
⇤D(t,⇧))
⇤= E[VD(t, 1)] +
⇢Z
(s,t)2Jv⇧(s, t)dsdt : J 2 J⇧
�.
Next, consider the monotone persuasion problem. By (21), we have
E⇥UP (s
0, t)
��s0 2 µ⇧(s)⇤= E
⇥UP (s
0, 0)
��s0 2 µ⇧(s)⇤+
Zt
0
E@UP (s0, t)
@t
���� s0 2 µ⇧(s)
�dt0
= E⇥UP (s
0, 0)
��s0 2 µ⇧(s)⇤+
Zt
0
u⇧(s, t0)dt0
and
E⇥VP (s
0, t)
��s0 2 µ⇧(s)⇤= E
⇥VP (s
0, 0)
��s0 2 µ⇧(s)⇤+
Zt
0
E@VP (s0, t)
@t
���� s0 2 µ⇧(s)
�dt0
= E⇥VP (s
0, 0)
��s0 2 µ⇧(s)⇤+
Zt
0
v⇧(s, t0)dt0.
Since u⇧(s, t) satisfies downcrossing in t, we have
t 2 z⇤(s,⇧) = argmax
z2[0,1]
Zz
0
u⇧(s, t)dt
if and only if for all t0, t00 2 [0, 1] such that t0 t t00 we have u⇧(s, t0) � 0 � u⇧(s, t00).
The principal’s expected payo↵ is
E[VP (s, x⇤P(s,⇧))] = E
⇥VP (s, 0)
⇤+ E[VP (s, z
⇤(s,⇧))]
= E[VP (s, 0)] +
Z 1
0
Zz⇤(s,⇧)
0
v⇧(s, t0)dt0ds
= E[VP (s, 0)] +
⇢Z
(s,t)2Jv⇧(s, t)dsdt : J 2 J⇧
�.
We thus have shown that E⇥VD(✓, x⇤
D(✓,⇧))
⇤= E[VP (✓, x⇤
P(✓,⇧))]+� for each ⇧ 2 ⇧,
where � = E[VD(t, 1)]� E[VP (s, 0)].

34 KOLOTILIN AND ZAPECHELNYUK
Finally, it is straightforward to verify that if (UD, VD) 2 PD and (UP , VP ) is givenby (3a), then (UP , VP ) satisfies (A1) and (AP
2 ), and thus it is in PP . Conversely, if(UP , VP ) 2 PP and (UD, VD) is given by (3b), then (UD, VD) satisfies (A1) and (AD
2 ),and thus it is in PD.
References
Alonso, R., and N. Matouschek (2008): “Optimal Delegation,” Review of Eco-nomic Studies, 75, 259–293.
Amador, M., and K. Bagwell (2013): “The Theory of Optimal Delegation withan Application to Tari↵ Caps,” Econometrica, 81(4), 1541–1599.
(2016): “Regulating a Monopolist with Uncertain Costs without Transfers,”Working Paper, Stanford University.
Amador, M., K. Bagwell, and A. Frankel (2018): “A Note on Interval Del-egation,” Economic Theory Bulletin, 6, 239–249.
Aumann, R. J. (1965): “Integrals of Set-Valued Functions,” Journal of Mathemat-ical Analysis and Applications, 12, 1–12.
Baron, D. P., and R. B. Myerson (1982): “Regulating a Monopolist with Un-known Costs,” Econometrica, 50, 911–930.
Dessein, W. (2002): “Authority and Communication in Organizations,” Review ofEconomic Studies, 69, 811–838.
Dworczak, P., and G. Martini (2019): “The Simple Economics of Optimal Per-suasion,” Journal of Political Economy, forthcoming.
Gentzkow, M., and E. Kamenica (2016): “A Rothschild-Stiglitz Approach toBayesian Persuasion,” American Economic Review, Papers & Proceedings, 106,597–601.
Goltsman, M., J. Horner, G. Pavlov, and F. Squintani (2009): “Mediation,Arbitration and Negotiation,” Journal of Economic Theory, 144, 1397–1420.
Guo, Y., and E. Shmaya (2019): “The Interval Structure of Optimal Disclosure,”Econometrica, forthcoming.
Holmstrom, B. (1984): “On the Theory of Delegation,” in Bayesian Models inEconomic Theory, ed. by M. Boyer, and R. Kihlstrom, pp. 115–141. New York:North-Holland.
Kamenica, E., and M. Gentzkow (2011): “Bayesian Persuasion,” American Eco-nomic Review, 101, 2590–2615.
Kolotilin, A. (2018): “Optimal Information Disclosure: A Linear ProgrammingApproach,” Theoretical Economics, 13, 607–636.
Kolotilin, A., and H. Li (2019): “Relational Communication,” Working Paper,UNSW Sydney.
Kolotilin, A., H. Li, and W. Li (2013): “Optimal Limited Authority for Prin-cipal,” Journal of Economic Theory, 148, 2344–2382.
Kolotilin, A., T. Mylovanov, A. Zapechelnyuk, and M. Li (2017): “Per-suasion of a Privately Informed Receiver,” Econometrica, 85, 1949–1964.

PERSUASION MEETS DELEGATION 35
Kovac, E., and T. Mylovanov (2009): “Stochastic Mechanisms in Settingswithout Monetary Transfers: The Regular Case,” Journal of Economic Theory,144, 1373–1395.
Krishna, V., and J. Morgan (2001): “Asymmetric Information and LegislativeRules: Some Amendments,” American Political Science Review, 95, 435–452.
Martimort, D., and A. Semenov (2006): “Continuity in Mechanism Designwithout Transfers,” Economics Letters, 93(2), 182–189.
Melumad, N. D., and T. Shibano (1991): “Communication in Settings with NoTransfers,” RAND Journal of Economics, 22, 173–198.
Mylovanov, T. (2008): “Veto-Based Delegation,” Journal of Economic Theory,138, 297–307.
Ostrovsky, M., and M. Schwarz (2010): “Information Disclosure and Unravelingin Matching Markets,” American Economic Journal: Microeconomics, 2, 34–63.
Quah, J., and B. Strulovici (2012): “Aggregating the Single Crossing Property,”Econometrica, 80, 2333–2348.
Rayo, L., and I. Segal (2010): “Optimal Information Disclosure,” Journal ofPolitical Economy, 118, 949–987.
von Neumann, J., and O. Morgenstern (1944): Theory of Games and EconomicBehavior. Princeton University Press.