PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY

of 79
Transcript of PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
1/79
DAVID W. TAYLOR NAVAL SHIPRESEARCH AND DEVELOPMENT CENTER
u Bethesda, Maryland 20084
PERFORMANCE PREDICTIONS FORPLANING CRAFT IN A SEAWAYI-.0
BYE. NADINE RUBBLE
*1 * APPROVED FOR PUBLtC RELEASE: DISTRIBUTION UNLIMITED
SHIP PERFORMANCE DEPARTMENT REPORT
I SEPTEMBER_1980 DTNSRDC/SPD-0840-02'- - -. ~.-- - ~ --. .c.
o 9:
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
2/79
MAJOR DTNSRDC ORGANIZATIONAL COMPONE TS
DTNSRDCCOMMANDER 0TECHNICAL DIRECTOR01
OFFICER-IN-CHARGE O F I E I N C A GCARDEROCK I ANNAPOLIS05 0SYSTEMSDEV ELOPMENT
DEPARTMENT 1
SHIP PERFORMANCE ____ ___[ AVIATION ANDDEPARTMENT 1j SURFACE EFFECTSis DEPARTMENT____ ___ ___ ______ .116
STRUCTURES COMPUTATION,DEPARTMENT MATHEMATICS AND_____ ______7LOGISTICS DEPARTMENT4 __ __ _17_ _ 18
PROPULSION ANDSHIP ACOUSTICSAUIARSYTM19ATMN DEPARTMENT19______________ 27
*SHIP MATERIALS CENTRALENGINEERING - - -INSTRUMENTATIONDEPARTMENT DPRMN28I 29
, A4w"
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
3/79
qECU,]Yyr C1LAS5IFICA~tIQN OIF THIS PAGE~ (ghmn nalm EIntcredIREPOT DCUMNTATONGEREAD INSTRUCTIONSREPOT DCUMNTATONGEBEFORE COMPLETING FORM)~)- ~2. GOVT ACCESSION NO . 3. RECIPIE1NT'S CATALOG NUMBER
7PORMANCE ~ePNFOR PLANING CRAFT IN ATL p 'SEAWAY ~,b~ J ~IA 19. CONTRACT OR GRANT NIUM11ERII1()
E. NDNE/ijUBBLE q///zMESS10. PROG11RA'M KMET PrO7Ed, TA K
David WH`.mTayy31o~r fNaval Ship R&D Center AE OKUI UBRBethesda, MD 20084 ...... Work Unit 1-1500-104Work Unit 1-1524-712Ii. CONTROLLING OFFICE NAME AND ADDRESS / i IORT DATIE
Naval Sea Systesa Command (PMS 300) _______Washington, DC 20362 13. NUMBER OF AEIs. MONITORING AGENCY NAME 6 AODRESS(Ifi ifferent from Controlling offi ce) is. SECURITY CLASS. (of thtis report)
Naval Se a Systems Command Detachment Norfolk UnclassifiedU.S. Naval Station Ila. DCAS I A9ATIowN*DOOAO-N*Norfolk, VA 23511 SHDLI6. DISTRIBUTION STATEMENT (of this0 Report)APPROVED FOR PUBLIC RELEASE: DISTRIBUTION UNLIMITED
* ~17. DISTRIBUTION STATFMKNT (of the abstract entered In Block 20, It different troomReport)
ISI.UPPLEMENTARY NOTES
IS. KE Y WUPDS (Continuo an roverme aide It necessary OldiuUntiy by block 111,1106r)[' Planing Crafts Resistance, Propulsion, Propeller Cavitation, AccelerationsIC0 AUSTRPAC (Continue an a..,.. side t necessary and Identify by block number)Ar~rocedure for the prediction of powering requirements and vertical accerationsat the preliminary design stage is presented for planing hulls with propellerson inclined shafts. Envelope, of operatl.ng speed versus wave height are devel-oped based on (1) maximum speed in seaway due to limits of the prime moversand/or propellers and (2) uman endurance limits due to vertical accelerations.Complete documentation of the computer program is provided in the appendix.Sample computations and plots are presentrni for a typical planing craft.DD ', 1473 EDITION 01 NOV65 ISOBSOLETE Ucasfe
SECURITY CLASSItFICATION OF THIS FRAaI (%In Date kntffed)
IJA
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
4/79
TABLE OF CONTENTS PageLIST OF FIGURES iiABSTRACTADMINISTRATIVE INFORMATION 1INTRODUCTION 1PROCEDURE A6 o 2
THRUST REQUIREMENTS 2PROPELLER CHARACTERISTICS B2POWER REQUIREMENTS D 3ENGINE TORQUE-RPM LIMITS3MAXIMUM SPEED I st a 4HABITABILITY LIMITS 4PROPELLER SELECTION 5
COMMENTS 6REFERENCES 10APPENDIX A - DOCUMENTATION OF SUBPROGRAMS 11
PROGRAM PHPRILM - EXECUTIVE ROUTINE 12SUBROUTINE PRCHAR - PROPELLER CHARACTERISTICS 28
SUBROUTINE OWKTQ - OPEN-WATER CHARACTERISTICS 30SUBROUTINE CAVKTQ - CAVITATION CHARACTERISTICS 31FUNCTION TQMAX - CAVITATION KT, KQ 35SUBROUTINE PRINTP - PROPELLER PERFORMANCE INTERPOLATION 36SUBROUTINE TPLOT - THRUST VS SPEED PLOTS 39SUBROUTINE HPLOT - WAVE HEIGHT VS SPEED PLOTS 41SUBROUTINE PRCOEF - PROPULSION COEFFICIENTS 43SUBROUTINE PHRES - BARE HULL RESISTANCE, SERIES 62-65 44SUBROUTINE SAVIT - RESISTANCE & TRIM, SAVITSKY 47
ii i_
ft ,l. :.,., ,:.._ -- ,,i-.,.,' "i, b,''~l i,i'O li~li, .,j,,.
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
5/79
TABLE OF CONTENTS (continued)Page
FUNCTION CIDSF - SCHOENHERR FRICTIONAL RESISTANCE 51FUNCTION SIMUN - NUMERICAL I' EGRATION 52SUBROUTINE DISCOT - DOUBLE INTERPOLATION 53FUNCTION MINP 54-SINGLE INTERPOLATION ROUTINESFUNCTION YINTE 55FUNCTION YINTX I 56
APPENDIX B - SAMPLE INPUT AND OUTPUT 57
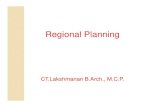
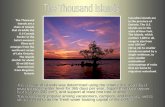
LIST OF FIGURES1 - Propeller Characteristics in Open-Water and CavitatingEnvironment 72 - Thrust Curves for Planing Craft with Twin Propallers andDiesel Engines 83 - Operating Limits for Planing Craft in Seaway 9
ii
F------------------------------------- - .iI i*-*..- kU*
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
6/79
NOTATIONa Average 1/10 highest vertical acceleration at 90Z LOAaBOW forward of transom
aCG Average 1/10 highest vertical acceleration at center ofgrayvityE X Maximum breadth over chinesD Propeller diameterEAR Propeller expanded area ratioF V Speed-displacement coefficientg Acceleration of gravityKI/ 3 Significant wave heightJ Propeller advance coefficientKT Propeller thrust coefficientKQ Propeller torque coefficient
QLO A Overall length of hullLp Projected chine length of hullL /VSlenderness ratiom Gear ratio9n Rate of revolution per second; rp."N Rate of revolution per minute; rpm
Brake powerPD Power delivered at propeller
" S Shaft power
Q Torque
,wii
', -. ... . "
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
7/79
NOT AT ION(continued)Qc Propeller torque load coefficientRa Resistance of appendaged hull in calm waterRa w Added resistance in rough waterRb Resistance of bare hull in calm waterR Total resistancetT ThrustV Ship speedVA Speed of advance of propellerZ Number of propeller blades1-t Thrust deduction factorI-w Thrust wake factor7 Displaced volumeA Displacementna Appendage drag factorn Propulsive efficiencyno Propeller open-water efficiencyr1R Relative rotative efficiencyP Water densitya Cavitation number based on advance velocitya0.7R Cavitation number based on resultant water velocity at0.7 radius of propellerT Trim angleT Propeller thrust load coefficient
ivw
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
8/79
ABSTRACTA procedure fo r the prediction of powering
requirements and vertical accelerations at thepreliminary design stage is presented forplaning hulls with propellers on inclined shafts.Envelopes of operating speed versus wave heightare developed based on (1 ) maximum speed inseaway due to limits of the prime movers and/orpropellers and (2) human endurance l imits due tovertical accelerations. Complete documentationof the computer program is provided in theappendix. Sample computations and plots arepresented for a typical planing craft.
ADMINISTRATIVE INMORMATIONThis project was authorized and partially funded by the Naval Sea
Systems Command Detachment Norfolk (NAVSEADET Norfolk) Work RequestN64281 80 WR 0 0062 under Work Unit 1-1524-712. Development of theprogram was also partially funded by the David W. Taylor Naval Ship R&DCenter (DTNSRDC) 8hip Performance and Hydromechanics Program undev.Work Unit 1-1500-104.
INTRODUCTIONNAVSEADET Norfolk requested DTNSRDC to develop a computer routine
to predict the operational limits of planing craft in a seaway based onstate-of-the-art technology.
The computer program predicts the resistance, thrust requirements,and vertical acceleration of a planing hull fo r a matrix of speeds andsignificant wave heights. It also estimates the maximum thrust, as afunction of speed, which can be developed with pre-selected prime movers,reduction gears, and propellers on inclined shafts. Speed, wave-heightenvelopes are then established based on the power limits of the propulsionsystem and the endurance limits of the crew due to accelerations. Thisprogram labeled PHPRLM is completely documented in Appendix A, withsample input and output in Appendix B. A similar program for a waterjetpropulsion system is documented in Reference 1. Both programs augment2the planing hull feasibility model program PHFMOPT and should eventuallybe incorporated into the master program.'References are listed on page 10.
....f 'I,/
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
9/79
PROCEDURETHRUST REQUIREMENTS
The calm-water, bare-hull resistance Rb is generally derived fromthe synthesized Series 62-65 resistance curves presented in Figure 9 ofReference 2. However, if more precise data are available, e.g., modelexperiments of the exact hull or a similar form, this resistance datacan be input directly fo r the matrix of speeds considered. Resistanceof the appendaged hull Ra is approximated using appendage drag factors naeither from Reference 3 or direct input if other data is available;Ra - Rb/na. Added resistance in rough water Ra w is predicted from anempirical equation recently developed by a regression analysis of planinghull rough-water experimental data. 4
0.5 (/1/3)-2.5R /A - 1.3 (Hl,/EJ)B FnV(~V~3 2aw/ 1H/3/ PX) FnPV V
Where Fv* V/(g Vl/)The total resistance for the hull then is Rt - R + Raw Thrust deductiont a awfactors l-t from either Reference 3 or direct input are used to calculatethe thrust requirement T - Rt/(l-t).PROPELLER CHARACTERISTICS
Propeller open-water characteristics are derived as a function ofpitch ratio P/D, expanded area ratio EAR, and number of blades Z withcoefficients developed from the Wageningen B-Screw Series. 5 Thrust andtorque coefficients KT and K. fo r flat face, segmental section propellersQ6such as the Gawn-Burrill Series tend to be slightly higher than th eB-Screw airfoil section propellers. This difference can essentiallybe taken into account by varying the EA R and/or P/D used in the open-water equations. If ctual open-water data are available for theselected propeller, these data can be input to the program.
The propeller characteristics in a cavitating environment areVderived from the maximum thrust and torque load coefficients Tc and Qcdeveloped as a function of cavitation number at 0.7 radius O0.7R forseveral propeller series in Reference 7. Options are available in theprogram fo r tabulating ai4/or plotting (see Figure 1) the propeller 1T
2
tl-J X " '
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
10/79
and K. as a function of advance coefficient J for the open-water conditionas well as the transition and fully cavitating regions at several cavitationnumbers a . These "transition" curves do not exactly match the shape ofexperimental cavitation data since they represent only 80 percent of themaximum thrust and torque lines developed in Reference 7 and are not fairedinto the point of KT or KQ breakdown. The 80 percent criteria is based onfull-scale trial data which indicates actual thrust and torque in thetransition region to be less than the maximums derived from the propellerseries data -- see Figures 5 and 6 of Reference 7. For Gawn-Burrill typepropellers, the 10 percent back cavitation line shown in Figure 23 ofReference 6 is used as a design criteria for adequate blade area. Thetabulated output is marked with the letter C to represent thrust whichexceed the 10 percent cavitation criteria or with a * when 80 percentof maximum thrust is attained. The thrust at which 10 percent back cavitationoccurs is represented by a dash line on the thrust-speed curves shown inFigure 2.POWER REQUIREMENTS
After the thrust requirements are computed for the matrix of speedsan d wave heights desired, J, KT, and then K are interpolated from thepropeiler characteristic curves as functions of thrust loading /2 andCorresponding propeller rpm N, torque Q, delivored horsepower PD'
propulsive efficiency propeller effic-iency r, etc. are then calculated.Thrust wake factor 1-w from either Reference 3 or input are used, with therelative rotative efficiency r assumed to be one, i.e., torque wake equalto thrust wake (torque required in open water is equal to that requiredbehind the ship).ENGINE TORQUE-RPM LIMITS
Engine characteristics are input as an array of engine rpm versusbrake power PB values covering the operational range of the engines.Gear loss and shaft loss constants, generally about 2 percent each, areused to estimate the corresponding shaft power P. and the power deliveredat the propeller PD' For a given gear ratio m the corresponding propeller
3
................................,... ... . .*** .. .,....
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
11/79
rpm and torque limits are then established. If the gear ratio is not input,the program will compute an optimum for maximum speed in a specified sea state.
m engine rpm at max4 .mum power of enginesopt propeller rpm required in specified sea, at max, engine power
The available thrust at the torque limits of the prime movers is derivedafter interpolation of the propeller data to obtain J, KX, then VIT asfunctions of torque loading K /J2 and a . Similarly the thrust at maximumrpm is obtained after interpolation for KT as functions of J and aA sample illustration of thrust requirements and thrust limits due tomaximum rpm and torque of the prime movers is shown in Figure 2 for atypical planing hull with diesel engines. Diesel engines generallyoperate with nearly constant torque whereas gas turbines have nearlyconstant rpm. The upper bound of the rpm limit curve correspondsto the "transition" region of the propeller characteristic curves andrepresents the maximum thrust which can be developed by the propellersunless operating in the supercavitating regime, at low JVs.IMAXIMUM SPEED
The maximum speed attainable in a given sea state is represented bythe intersection of the thrust requirement curve and the thrust limitcurve due to either engine torque or rpm restriction, whichever occursfirst. With an optimum gear ratio, maximum speed for a specified sea stateis attained at maximum power of the prime movers, i.e., intersection oftorque limit and rpm limit curves. The maximum speed is derived for eachwave height. Figure 3 shows a sample graph of wave height vs maximum speed.The computations and plots can be made for I to 4 different gear ratios foreach case, one of which can be the optimum mg derived in the program.
HlABITABILITY LIMITSAverage 1/10 highest vertical accelerations at the center of gravity
aCG and at the bow aBOW (90% of the overall length forward of thetransom) are estimated for the matrix of speeds and wave heights with8empirical equations recently derived from experimental data.
4I',
I I-I I.I.I I*I i I*I I i i
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
12/79
aCG- 7.0 (H1/3/BPX) (1 + T/2)0.25 -1.25 F
0.500.75 0.7510.5 (H /Bx (1 + r/2)050 -075 FaBOW - 1/3 PX' (/PX) nVTh e accelerations at any location between the CG and the bow, such as thehelmsman's station, can then be approximated by linear interpolation.These data are interpolated to obtain speed, wave-height envelopes foraverage 1/10 highest vertical accelerations of 1.0 g, representing theendurance limit of the crew for 4 to 8 hours, and 1.5 g, representingthe endurance limit for 1 o 2 hours. Sample speed, wave-height envelopesare shown in Figure 3.PROPELLER SELECTION
The program can be run with any number of propeller sets to aidein the selection of optimum parameters. P/D, EAR, and Z must be inputfor each set. Propeller diameter D may either be input or selected bythe following method. Design speed and wave height are input and thecorresponding thrust requirement is computed. A design power, no texceeding the maximum power of the prime movers, is also input. A minimum2diameter Dmin is computed from the thrust loading KT/J corresponding tothe 10 percent back cavitation criteria from Reference 6. A maximumdiameter D is computed from KT/j2 at peak open-water efficiency. ThemaxTpower and rpm requirements at design speed are also computed for severalD's in 5-inch increments from D to D . D is selected as the optimummin max, mindiameter if the power required with Dmin does not exceed the design power.Optimum diameter is interpolated from the 5-inch increment array of D'rif design power falls between the power requirements for Dmin and D x.When design power exceeds the requirements for both D i and Dmax, Dmais selected as the diameter except for the following case. When Din isactually greater than Da, indicating more than 10 percent cavitationat peak efficiency, Dmin is the diameter selected. The optimum diametaris always rounded up to the next full inch.
q5
Jd.. . ... s
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
13/79
No selection process fo r P/D or EAR is built into this programsince many different factors may influence a particular design. However,numerous zets of parameters can be run for each case at minimal costfor use in the development of design charts. In the diameter selectionroutine, diameters corj'espondin to even increments of 100 rpm areinterpolated from the array of 5-inch increment ditmeters. These valuescan be used for plctting contours of rpm on the propeller design chartsto aide in the selection ot a propeller to match specific engine and/orgear ratio requirements.
COMMENTSThis programn. together with the planing hull feasibility model
program PHFMOPT, is quita useful for making timely preliminary designstudies for planing craft. It can also be used for displacement shipssince the program has options for input of the resistance and propulsioncoefficients, but thia progr&m does not take into account any differencein thrust and torque wake.
Some means of predicting roll at the preliminary design stage isalso desirable for enhancement of th,'.s program. A low-speed rollcriteria needs to be established for completely defining the speed,wave-height envelope.
1kII
1*6I
.V .t. ,. .
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
14/79
/D 1 00 EAR 0.-70 IPROF I.6.3
25.00
00.0
IN.b K 0
L' 0 0.0.40 0.O 0'.0o0 I'm.'0 l'.A0 1.60
Figur I rplejhrceitc noe ae n aiaigIvrrmn07
.. ...
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
15/79
C3 Q3
H1-F
ENGINE LORaT 07MI 3ROELE13 1.
(z C3liTLO 1
O t .4 LR AI-tP(Um
UU
41300 6.10.0 1
ENIN 1ORQ00 000T 242b00GV KNOTS)a0' 0 ' 0 4.0 ' o W00 I a 120 0 " G
V /0CFiue2 Trs1uvsfrPaigCat3ihTi rplesadDee nie
138
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
16/79
CURVE 1 -- 1.0 G- 45,0 9"TWD O TRANSOMCURVE 2 -- lb G -- 45,0 FT FWO TRANSOMCURVE 3..- POWER flItT -- 2.46 GEAR RATIOCURVE 4..- POWER LIMIT -- 2.00 OGEA RATIO4, 3.
0
9.
i! oi:I V (KNOTS )
V M./SEC,'Figure 3 -Opertitng Limits fo r Planing Craft in BSewy
JL .' " .. . . . .............:
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
17/79
REFERENCES1. Hubble, E. N., "Performance Predictions for Four Proposed Designs
of a 28-ft Survey Launch," DTNSRDC Report SPD-0902-O (Jul 1979).2. Hubble, E. N., "Program PHFMOPT, Planing Hull Feasibility Model,
User's Manual," DTNSRDC Report SPD-0840-OI (Revised Aug 1979).3. Blount, D. L. and D. L. Fox, "Small Craft Power Predictions,"
Marine Technology, Vol. 13, No. 1 (Jan 1976).4. Hoggard, M. M., "Examining Added Drag of Planing Craft Operating
in a Seaway," Paper presented to Hampton Road Section, SNAME (Nov 1979).5. Oosterveld, M.W.C. and P. Van Oossanen, "Further Computer
Anmalyzed Data of the Wageningen B-Screw Series," International ShipbuildingProgress Vol. 22 (Jul 1975).
6. Gawn, R.W.L. and L. C. Burrill, "Effect of Cavitation on thePerformance of a Series of 16 Inch Model Propellers, Trans. INA, Vol. 99(1I97).
7. Blount, D. L. and D. L. Fox, " Design Considerations for PropellersIin a Cavitating Environment," Marine Technology (Apr 1978).8. Hoggard, M. M. and M. P. Jones, "Examining Pitch, Heave, an d
Accelerations of Planing Craft Operating in a Seaway," Paper presentedat High-Speed Surface Craft Exhibition and Conference, Brighton (Jun 1980).iiiIIq
1
; 10 //
- ,..
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
18/79
APPEND IX A*DOCUMENTATION OF SUBPROGRAMS FOR PHPRILt
I...
I.I
!i
. .. _ ,. .... . . .. ] .-'., . '" "' :'11I;" : -- - . ,,,..!:;:,,!:.I...,,: ',:. ,, [ " - ' , ,"" ' ''-" :""#"' '" " ' :.t.
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
19/79
NAME: PROGRAM PHPRLMPURPOSE: (1) Predict the resistance, thrust requirements, and
vertical accelerations of a planing hull fo r a matrix ofspeeds and significant wave heights.(2 ) Determine maximum speed obtainable at each waveheight with pre-seleoted prime mover(s) and propeller(s).(3) Determine wave heights versus speed correspondingto human acceleration endurance limits of 1.0 g and 1.5 g
SUBPROGRAMS: PRCOEF, PHRES, SAVIT, PRQLAR, PRINTP, HPLOT,TPLOT, MINP, YINTE, YINTZ, CALCOMP Routines PLOT & PLOT$j INPUT: Via Punched Cards Card Columns
NCASES Number of cases--repeat following 1 1-4set of cards fo r each case
TITLE Identification fo r hull design 2 1-80XLOA Overall length of hull (LOA) in ft 3 1-8PL Projected chine length of hull (Lp) 3 9-16in ftBPX Maximum beam over chines (B ) in ft 3 17-24PxHT Draft at transom (TA) in ft 3 25-32DLBS Displacement at rest ( A) in lb 3 33-40BETAM Deadrise angle at midships (0m) in deg 3 41-48XLCG Distance of center of gravity forward 3 49-56
of transom (0n) in ftVCOG Distance of center of gravity above 3 57-64
baseline (KG) in ftXACC Distance. forward of transom in ft 3 65-72at which accelerations are to becomputed, in addition to CG andbo w locationsFTRIM Fixed trim angle ( T ) in deg 3 73-80
If not input, program will useSavitsky prediction of trim ateach speed
PEMAX Maximum brake horsepower of each 4 1-8prime mover (P )max
12
,~~~~~~~~~..a. -......... -:...... ' .u.. H,+,,: _. ' "...%. . .,,t,....,
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
20/79
PROGRAM PHPRLMCard Columns
REMAX Maximum revolutions per minute (rpm) 4 9-16of ;rime mover No.,), correspondingto max
GL Gear loss ratio (K) brake 4 17-24horsepower/shaf t hrsepoverSL Shaft losa ratio (K ) - shaft 4 25-32horsepower/hp 2 developed at propRHO Water density (p) in lb x sec2/ft 4 5 1-8VIS5 Kinematic viscosity of water (V) 5 9-16in ft2/sac x 105GA Acceleration of gravity (g) in ft/sec 2 5 17-24DC? Correlation allowance resistance 5 25-32predictions, generally zeroSD? Standard deviation factor fo r 5 33-40resistance data. Use zero fo r mean
Series 62-65 curvesNV Number of speeds -- maximum of 20 6 1-4NW H Number of wave heights, including zero 6 5-8
-- maximum of 5NP R Number of prime movers 6 9-12number of propellers (n pr)NE Number of points input from engine 6 13-16characteristics curve -- maximum of 10IPROP Control for type of propellers 8 17-201 fo r Gawn-Burrill type"(flat face, segmental sections)
2 fo r Newton-Rader type3 for Wageningen B - Screw type(airfoil sections)IPM Control for type of prime movers 6 21-241 fo r diesel engines2 fo r gas turbines
* 13
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
21/79
PROGRAM PHPRLMCard Columns
IPLOT Control for graphical output, i.e., 6 25-28CALCOMP plots0 for no plots1 for plots of thrust vs speed andspeed-wave height envelopes2 for plots of propeller characteristicsin addition to plots aboveIPC Control for propulsion coefficient, 6 29-321 if thrust deduction factor (l-t),
thrust wake factor (l-w), ardappendage drag factor (na) areestimated by Subroutine PRCOEF2 if l-t, l-w, and va are input
IRES Control for bare hull resistance data 6 33-361 if resistance is estimated bySubroutine PHRES based onSeries 62-65 data2 if resistance is inputIOW Control for propeller open-water 6 37-40
characteristics1 if computed by Subroutine OWKTQbased on Wageningen B-screwcoefficients2 if points from open-water curvesare input
NJ Number of points input from each open- 6 41-44water curve, if IOW = 2. Maximum of 60.
IPRT Control for amount of printed output 6 45-48'1 0 for complete output (pages 1-10)1 to omit engine characteristics andpropeller characteristics (pages 2,4,5)
VK T Array of ship speeds (VK) in knots, 7 1-8in ascending order. Maximum of 20 . 9-16Do not include zero speed.10 speeds per card. Use 2 cards if NV>10
14
_ t
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
22/79
PROGRAM PHPRLMCard Columns
H1 3 Array of significant wave heights (H1 / 3 ) 8 1-8in ft, in ascending order. Maximum of 5. 9.16First wave height must be zero.
PE Array of operating horsepower values fo r 9 1-8each prime mover (Pe), in asoending 9-16order. Maximum of 10.
RE Array of rpm values for prime mover 10 1-8(Ne), corresponding to Pe values on 9-16card 9
TDF Array of 1-t values corresponding to 11 1-8speeds on Card(s) 7. Use 2 cards if 9-16NVA>10. Omit Card(s) 1r if IPs 1
TWF Array of -w values at each speed 12e8resOmitard(s) 12 in PC i 9-16
ADF Array of la values at each speed 13 1-8Omit Card(s) 13 if IPC = E 9-16
RBH Array of bare hull resistance (Rb) 14 1-8in lb at each speed. Appxndaged 9-16resistance may be input ifa is setto 1.0. Omit Card(s) 14 if IRES a 1
JT Array of propeller advance coefficients 15 1-8(J) in ascending order. Maximum of 60. 971610 points per oard.Omit Card(s) 15 if fOW 1
KTO Array of propeller thrusts coefficients 16 1-8(KT) in open-water corresponding to 9716input J's. Omit Card(s) 16 if IOW = 1SKQO Array of propellor torque coefficient 17 1-8"A (KQ) in open-water corresponding to 9-16. input J's. Omit Card(s) 17 if 1OW a 1
NGR, Number of gear ratios considered 18 1-4-- maximum of 4NPROPS Number of sets of propellers considered 18 5-8GR Array of gear ratios (m_) 19 1-8SIf m = 0.0 is input, pfogram 9-16
willgcompute optimum value of r.
15
OR 43
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
23/79
PROGRAM PHPRLMCard Columns
DIN Propeller diameter (D) in inches 20 1-8PD Propeller pitch/diameter ratio (P/D) 20 9-16EAR Propeller expanded area ratio (EAR) 20 17-24Z Number of blades per propeller 20 25-32PEDES Brake power of each prime mover 20 33-40used for sizing propellerX1 Index of ship speed, from Card 7, 20 41-48for sizing propellerXJ Index of wave height, from Card 8, 20 49-56for sizing propeller and for
calculating optimum mIf DIN > 0, do not input PEDES and XXIf DIN a 0, rogvam will calculate adiameter based on above speed, waveheight, and powerValues of P/D, EAR, and Z must be input,
Note; Repeat Card 20 for each se t of propellers considered,Then repeat Cards 2 through 20 for each case,
I1
16
.................. ....... .......... ........ A . .,,..
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
24/79
PROGRAM PHPRLM1OUTPUT:Page 1 -- Echo of Input DataPage 2 -- Characteristics of Prime Movers (Not Printed if IPRT > 0)
MAX.BHP Pemax = Maximum brake horsepower of each primemover, input from Card 4MAX.RPM N1emax 2 Maximum rpm of prime mover, from Card 4GEAR RATIO m - rpm of prime mover/propeller rpmfrom Card 4BHP/SHP KI = gear loss ratio, input from Card 4SHP/DHP K2 shaft loss ratio, input from Card 4
npr number of prime movers a number ofpropellers input from Card 4BHP PER Pr'ENGINE points from engine charaoteristic curve,
IEIEP N input from Cards 9 and 10, ENGINE RPM Net
TOTAL DH P PD' total delivered horsepower at propellersPe npr /K1 /K2
PROP. RP M N' propeller rpm a Ne/ mgQ-FT.LB Q' Maximum developed torque in ft-lb33000 PD' / (2 it N')
Page 3 -- Propulsion Coefficients and ResistanceLOA-FT LOA X overall ship length in ft , input from Card 3LP-FT Lp = projected chine length in ft , from Card 3BPX-FT Bpx 2 maximum beam over chines in ft, from Card 3HT-FT TA = draft at transom in ft, from Card 3DISPL-LB A = displacement at rest in lb, from Card 3BETA-DEQ 8 m a deadrise at midships in deg, from Card 3
17
__- , __________________
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
25/79
PROGRAM PHPRLMLCG-FT AO CCO from transom in ft, from Card 3VCG-FT KG CO from baseline in ft , from Card 3XACC-FT Xaca = distance from transom in ft, at whichaccelerations are computed, from Card 3C-LOAD CA = beam loading coefficient
2 /A/( P & Bp 3 /1/3 PXPXLP/V13 L /V Xn slenderness ratio
LP/BPX L/B C length-beam ratio, based on projected chinelength and maximum chine beamD-IN Din propeller diameter in inches, from Card 4P/D P/D propeller pitch ratio, from Card 4EAR EA R = propeller expanded area ratio, from Card 4NPR npr a number of propellers, from Card 4V-KT VK ship speed in knots, input from Card 7V-LOA VK/r =speed-length ratio based on overall lengthFNV Fn V speed-dis laoIo nt coefficientV ,( g ,93SIVMA a = cavitation number1-T 1-t a thrust deduction factor1-W 1-w = thrust wake factor = torque wake factor"E A na = appendage drag factor
1-t, 1-W, na generated from Subroutine PRCOEF if IPC =11-t, 1-w, na input from Cards 11, 12, 13 if IPC a 2K RB/W Rb/W a resistance-weight ratio fo r bare hull instill water
Rb generated from Subroutine PHRES if IRES a 1Rb input from Card 14 if IRES = 2W weight of craft = displacement at rest A
RA/W Ra/W a risistance-weight ratio fo r appendaged hull"in still water(Rb/W) / na18
',P,' I" a"p.qilll ll ' '-:
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
26/79
PROGRAM PHPRLMEHPB EHPb = effective horsepower of bare hullRb V / 550,EHPA EHPa M effective horsepower of appendaged hull"- Ra V / 550
Page 4 -- Propeller Open-Water Characteristics (not printed if IPRT >0)IPROP Indicator for propeller type, from Card 61 for Gawn-Burrill type2 for Newton-Rader type
3 for Wageningen B-screw typeD-IN Din - Propeller diameter in inches, from Card 20D-FT D M Propeller diameter in ft - Din/12P/D P/D - Propeller pitch ratio, from Card 20EAR E.A.R = Propeller expanded area ratio, from Card 20BLADEC Z Number of blades per propeller, from Card 20
DEPTH-FT ho depth of center of propeller belowwaterline in ft = TA + 0.75 DSIGMA/VSQ O/VA2 - constant for cavitation numberS (PA + pH-
PA atmospheric pressure = 2116 lb/ft 2PV = vapor pressure = 36 lb/ft 2PH = static pressure = p g ho
AP-SQFT Ap Projected area of propeller in sq. ft('TD 2 /4) (EAR) (1.067 - 0.229 P/D)VA speed of advance = (l-w) VV ship speed in ft/seo
* .J J - propeller advance coefficient VA/(nD)n = propeller revolutions per second (rps)
KT KT s propeller thrust coefficient = T/(p n2 D)
T= thrust per iropeller in 2
19Ai ______________________* -' T '-1 "Vi+
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
27/79
PROGRAM PHPRLMKQ KQ propeller torque coefficient = Q/(p n2 D )
Q torque per propeller ii ft-lbTables of open-water KT and KQ values generated fromSubroutine OWKTQ if IOW = 1 or input from Cards 15-17 ifIO W = 2.
EP -0propeller open-water efficiency0 (J/2w) (KT/KQ)KT/J2 K /J 2 propeller thrust loading - T/(P D2 VA2TAKQ/J 2 KQ/J 2 W propeller torque loading - Q/(p D3 VA )
3 2 3KQ/J3 KQ/J3 propeller power loading - Qn/(p D VA )TC - thrust load coefficient - T/(Ap V0 .7 p/2)
" YKr/[. (Ap/D 2 ) (J2 + 4.84)].1 2QC Q - torque load coefficient - Q/(Ap VO.7R p/ 2 )
.K0/[ (Ai/D) (2 0 + 4.84)]cavitation number based on velocity at 0.7R0.7R cavitation number based on advance velocity2 2S 2/(J + 4.84)
EPMAX n0 maximum propeller efficiencymax
Page 5 - Propeller Cavitation Characteristics (Not Printed if IPRTXO)IPROP, D-IN, etc. - Same as Page 4Tl, T2, Ql, etc. - Constants from Subroutine CAVKTQSIGMA a cavitation number 2
S (PA + pH - / (1/2 pVA)J J - advance coefficient - VA/(nD)KT KT thrust coefficient - T/4) . 2 D4 )KQ KQ a torque coefficient Q/(p n2 D5 )
Tables of and K at various r's generated* from Subroutine CAVKTQ
20
' Id ,. . L . *' .; I' ... - .
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
28/79
..... "VI]n N
PROGRAM PHPRLMPage 6 -Propeller Sizing (Not Printed if Diameter is Input)VA (FPS) V speed of advance In ft/secA a V (1-w) where V is design ship speedP/D P/D = propeller pitch ratioEAR EA R U propeller expanded area ratioNPR n pr number of propellers - number of prime moversBLADES Z = number of blades per propellerDIN D n a propeller diameter in inchesMIN. DIAM D a minimum diameter based on 10% back cavitationtnin criteria from Gawan-Burrill propeller seriesMAX. DIAM D a Lmaximum diametev based on maximum propellermax open-water efficiencyOPT. DIAM D p - optimum diameter selectedDFT D - propeller diameter in ftSIGMA aY - cavitation number based on VA
22JT - advance coefficient at KT/J2KCT KT = thrust coefficient at JTICQ KQ W torque coef ficient atJEP no propeller efficiency at JT
*after n0 indicates operation at J above peak efficiencyPC TiD W propulsive coefficientT-LB T 0 total thrust requirement in b, t design speed
and wave heightC after T iridicates more than 10% back cavitation*after T indicates max~mum thrust due to cavitation
Q-FT.LB Q 0 total torque in ft-lbRPM N 0 propeller rpmDHPI P = total power developed at propellers
21
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
29/79
PROGRAM PHPRLMPage 7 - Powering Requirements and AccelerationsWOA-FT, LP-FT, etc - Same as Page 3V-KT VK : Ship speed in knots, input from Card 7H13-FT H1 /3 signifioant wave height in ft, from Card 8RW/W Rt/W total resistance-weight ratio in seaway
(Ra/W) * (Raw/W)Raw/W - added resistance-weight ratio in waves
'1.3HI3 /Bpx)0'5 (LpVll/3)"2.5 FnV (Reference 4)T total thrust requirements in lb
R /(1.t)KT/JSQ KT/J 2 thrust loading per propeller
T/(npr PVA D )"JT JT propeller advance coefficient corresponding
"to KT/J2
KT KT propeller- thrust coefficient at JTKQ KQ - propeller torque coefficient at JTEP - propeller efficiency at J
0 after n indicates operation beyond peak eff iciencyi .e. ,high JJT, KT, KQ , n0 generated fromSubroutine PRINTP as function of KT/J 2and a
n = propeller rps = V / (JT D)_-LB T a total thrust in lb KTpn 2 D4 npr
oheck; T z RT / (-t)4 C after T indicates more than 10 percent back cavitation
* after T indicates that thrust required exceedsmaximum thrust limit of propeller due tocavitation -- unless the propeller canoperate in the fully cavitating range, ie.,high rpm, low JT.
Q-FT.LB Q total torque in ft-lb = KQ Pn2 D5 npr' after Q indicates that torque required exceedstorque limit of the prime movers at the
required rpm
22
J"- -"" ' : : = ' ': t ' ' '11 ' L:L ' '' ' '-- '" '" { ' . ld " " " -' . -tpd ' . ,:r..................... i..i','
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
30/79
PROGRAM PHPRLMRPM N upropel~ ler rpm 60 n
*after N indiuates that. rpm required exceeds rp mlimit of the prime movers
DHP PD2total horsepower developed at propellersa2rT Q n / 550FE total effective horsepower
RT V / 550PC T1D propulsive coef'fioient EPcheck: n 2 71H n
TIH 2hull ef'ficienoy x (1-t) /(1-w)N = relative rotative efficiency a 1.0 sincetorque wake assumed equal to thrust wake
TR~IM T trim angle in degfix~ed trim angle, if' nput from Card 3otherwise trim generated by Subroutine SAVITCG ACC a G 2 averatge 1/10 highest vertical accelerationsat the center of gravity in g 3
-7.0 (H A ~) (1 + T/2)0 2 (LE/7 /3)-1.25 FBOW ACC a =O verage 1/10 highest vertical accelerationBOWat 90% of LO forward of transom in g's
0 10.5 (H /3/BX) (1+ T/2) 0 (Lp/BpX) 07 5F 0
X ACC a N average 1/10 highest vertical accelerationsat location X cc in g'sa (+B(a aC) (X -LCG)/(0.9 L -LCC BO CG acc OA
Equations for aC and a from Reference 8.
232
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
31/79
PROGRAM PHPRLMPage 8 - 10 Percent Back Cavitation (Gawn-Burrill Propellers)
V-KT VK ship speed in knots, from Card 7SIGMA a cavitation numberT-LB T - total thrust in lb at which 10% back
cavitation occurs*r ,94 4r 0.88c O,7R
Q-FT.LB, RPM, DHP a corresponding values of torque, rpm~deliveredpowerJ, KT, KQ, EP a corresponding propeller characteristics
Page 8 - Maximum Speed with Optimum Gear Ratio (Input m. - 0)V-KT VK ship speed in knots attainable in specified
max sea with maximum powerH13-FT H 3 a significant wave height in ft for computingoptimum gear ratioDHP PD a maximum power delivered at propellersm axRPM-P N M propeller rpm required at VK and H1 /3ma xOPT.GEAR m - optimum gear ratioRATIO gopt W engine rpm at maximum power
propeller rpm required at VKma and H1 / 3max
I.24
'A.....,.. -
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
32/79
PROGRAM PHPRLM
Page 9 -- Thrust at Maximum RP M of Prime MoversGEARRATIO m - gear ratio, input from Card 19 or optimumg m computed by programRP M Nmax u maximum rpm of propellers
= Nmax /nmax = Maximum rps of propellers * Nmax/ 6 0
V-KT VK = Ship speed in knots, input from Card 7SIGMA a cavitation number
Jmax - propeller advance ooeffioient at max. rpm= VA / (nmax D)KT KT x propeller thrust coefficient at JmaxKQ KQ a propeller torque coefficient at JmaxEP n0 2 propeller efficiency at Jmax
KT, K, no generated from SubroutinePRINTP as function of Jmax and aT-LB Tmax = maximum thrust in lb available at Nmax= KT Pnfax D4 npr
C after T indicates more than 10% back cavitationmax*after T indicates limit due to cavitationI. max
Q-P'T.LB =maorque in ft-lb at Nma*aftor indicates that torque limit of
' prime movers is exceededDHP P power delivered at propellers - 2n Qmax nmax/55C
25
,!
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
33/79
PROGRAM PHPRLM
Page 9 -- Thrust at Torque Limits of Prime MoversDH P PD' 2developed horsepower calculated f'rom input
points f'or engineRP M N' = propeller rpm characteristics-- Seeoutput Page 2Q-FT.LB Q' = developed torque J
n'f = propeller rps z N'/60V-KT VK' ship speed in knots at whichK9 z Q'/( Pn'D5 npr) matches3 = V '/(n'D) from propeller curvesobtained by iteration and interpolationSIGMA a' = Cavitation number at VK'S' = propeller advance coefficient at n'
= VA,/(n'D)KT KT = propeller thrust coefficient at J'KQ KQ 2 propeller torque coefficient at J'EP no = propeller efficiency at J'
KT , KQ , no generated from Subroutine PRINTPas function V' nd cfT-LB T' = thrust in lb available= KTP(n')2 D4 nprQ-FT.LB Q' = torque in ft-lb check = KQ n) 2 D5 np ,DH P PD' = developed horsepower check = 27TQ' n'/550
' Page 9 -- Speed-Power LimitsH13=FT H1/ 3 = significant wave height in ft, input fromCard 8V-KT V ship speed in knots at which thrust required
KVmax at H1/3 (output page 6) reaches the thrustlimit of the prime movers (output page 7)due to either rpm or torque restriction,whichever is lower
26
Ai -.. .
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
34/79
PROGRAM PHPRLMT-LB T total thrust in lb at VKmax
C after T indicates more than 10%back cavitation* after T indicates thrust limit due to cavitation
Q-FT.LB Q - total torque in ft-lb at VSafter Q indicates torque limit of prime movers
RP M N % propeller rpm at VKmaxI fter N indicates rpm limit of prime moversDH P ID total developed horsepower at VKmax
Page .O - Habitability LimitsV-KT VK a ship speed in knots, Input from Card 7IOG L.Og = average 1/10 higiiest vertical accelerationsrepresenting the endurance limit of the crewfor a maximum of 4 to 8 hours1.5G l.5g a average 1/10 highest vertical aooelo.rationsrepresenting the endurance limit of the crewfor I to 2 hoursH13-FT HI/ 3 significant wave height in ft. correspondingto habitability limit of 1.0 g (or l.5g) --interpolated from accelerations at locationXaoc on output Page 6
Note: acceleration predicators areconsidered not valid for H1/3 > 0.75 BpX
:1
27
IMMUNE
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
35/79
NAME: SUBROUTINE PRCHARPURPOSE: Generate propeller open-water and cavitation
characteristics. Select suitable propellerdiameter, if no t InputCALLING SEQUENCE: CALL PRCHARSUBPROGRAMS CALLED: OWKTQ, CAVKTQ, PRINTP, YINT2INPUT:
DIN Din - propeller diameter in inches, from Card 20If not input, a suitable diameter will beselected by this routine.PD P/D propeller pitch ratio, from Card 20EAR EAR 0 expanded area ratio, from Card 20Z Z N number of blades, from Card 20VADES VA design speed of advance in ft/sec derivedfrom design ship speed, indexed from Card 20TDES T * totsl thrust in lb required at design speed
and wave height, indexed from Card 20PDES P - total design power at propellers derived fromdesign brake power input on Card 20PRN nr - number of propellers, from Card 6
PROPELLER OPEN-WATER CHARACTERISTICS: See Subroutina OWKTQPROPELLER CAVITATION CHARACTERISTICS: Sea Subroutine CAVKTQ
'
*|.
i!I
. . .. " w..
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
36/79
SELECTION OF PROPELLER DIAMETER: (When D is not input)DMIN Dmin minimum diameter in inches based on 10Z backcavitation criteria for adequate blade area
of Gawn-Burrill type propellers
12 T / Cn 1p VA0 (V /,J2)]2 .94f 0,88where KT/J2 is derived from 0.494 0,88STC 0,7Rrepresenting the Gawn-Burrill 10X cavitationline
DMAX D maximum diameter in inches based on maximummax propeller efficiencysame equation as above, with K%/J2 at pointof maximum 0
DIAM D array of diameters in increments of 5 inchesfrom D n to DmaxDHP P - array of power requirements fo r above diametersRPM N array of propeller rpm requirements forabove diameters
DIV D optimum diameter selected, rounded up toopt next full inchDopt - Dmin if power required < design powerD is interpolated from D array if design power isopt between requirements f~r Dmin and Dmax1maxSD opt Dmax or DMin, whichever is larger, if bothpower requirements exceed design power
I29
. 29.r g
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
37/79
NAE SUBROUTINE OWKTQPURPOSE: Calculate propeller open-water characteristics asfunction of pitch ratio, expanded area ratio, and number
of blades from coefficients derived from WageningenB-Scraw Series.REFERENCE: Oosterveld and Van Oossanan, "Recent Development inMarine Propeller Hydrodynamics," Proceedings of theNetherlands Ship Model Basin 40th Anniversary (1972),and "Further Computer Analyzed Data of the WageningenB-Screw Series", International Shipbuilding Progress,Vol. 22 (July 1975).CALLING SEQUENCE: CALL OWKTQINPUT:
PD P/D - propeller pitch/diameter ratioEAR EA R - propeller expanded area ratioZ Z = number of propeller blades
OUTPUT:N nj - number of J values generated -- max of 60JT J - array of propeller advance coefficients inascending order from (J-O.) to (J at K--O.)in increments of 0.025 if P/D_t.2KT KT - array of open-water thrust coefficients"- f (P/D, EAR, Z, J)KQ K - array of open-water torque coefficients- f (P/D, EAR, Z, J)
K- and K developed from equations in above references.For GawngBurrill type propellers (IPROP-l) the equationsare modified to produce slightly higher % aiL Kthan the Wageningen B-Screw Series. T
30
ow
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
38/79
NAME, SUBROUTINE CAVKTQPURPOSE: Calculate propeller characteristics in cavitationregime as function of pitch ratio, expanded arearatio and cavitation number. Generate CALCOMP plotsof KT and KQ versus J.REFERENCE: Blount and Fox, "Design Considerations forPropellers in a Cavitating Environment," Marine
Technology (Apr 1978)CALLING SEQUENCE: CALL CAVKTQ
SUBPROGRAMS CALLED:TQMAX, CALCOMP RoutinesINPUT:
IPROP Control for type of propellers= 1 for Gawn-Burrill type(flat face, segmental sections)
= 2 fo r Newton-Rader typesS3 fo r Wageningen B-Screw (airfoil sections)PD P/D a propeller pitch/diameter ratio
EAR EAR a propeller expanded area ratioNJ nj a number of J values input from open-watercurves -- max. of 60JT 3 = array of propeller advance coefficientsKTO KTo a corresponding array of propelleropen-water thrust coefficientsKQ O KQo = corresponding array of propeller
open-water torque coefficientsNS ns number of cavitation numbers -- max. of 8
,4: -- at which propeller characteristics areto be computed and printed from thisroutine (if ns = 0 only the constantsare computed)
SIGMA 0 array of cavitation numbers
IPLOT Control of CALCOMP plots:2 fo r plots of KT and KQ vs J at each a
(no plots done if IPLOT < 2)
31
".... . ..- " . . . . ., ,,
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
39/79
SUBROUTINE CAVKTQGENERAL NOTATION FOR PROPELLERS:
V A = propeller speed of advancen = rate of revolutionD = propeller diameterT a thrustQ torqueP x water densityPo a pressure at center of propeller pAPH-PVJ a advance coefficient VA / (n D)KT = thrust coefficient T / (p n2 D4 )KQ v torque ooefficient a Q / (p n2 D5 )KT/J 2 = thrust loading = T / (pD 2VA )KQ/J 2 = torque loading = Q/(p D3 VA )KQ/J 3 = power loading v Q n/ ( pD2 VA3)
M cavitation number based on advance velocity" Po / (1/2 PVA 2)VO.7R 2 velocity at 0.7 radius of propeller=VA2 + (0.7r nD)2 = VA 2(J2*4. 8J),/,j200.7R cavitation number based on VO.7R
Po/(lt2PVO.7R2 ) =aJ 2 /(J 2+4.84)Ap projected area of propeller
(rrD 2 /4) EA R (1.067-0.229 P/D)TO thrust load coefficient
* T / (1/2 p Ap VO.7R 2)KT / 1l/2 (Ap/D 2 ) (j2+4.84)j
Q0 torque load coefficient= Q ,'(1/2 P Ap VO.72R 2)
KQ / [1/2 (Ap/D 2 ) (J2+..84)]
32
."I
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
40/79
SUBROUTINE CAVKTQMAXIMUM THRUST AND TORQUE LOADS:
Blount and Fox (see reference) give equations formaximum thrust and torque load ooeffioients in acavitating environment based on regression ofexperimental data for the three propeller series usedherein.TOm z maximum thrust load coefficient= a ao.7 b (transition region)= Tox(fUlly oavitating region)QOm = maximum torque load coeffiiientM 0 O. 7 Rd (transition region)a Qox (fully cavitating region)
OUTPUT: IPROPTi a = 1.2 1a = 0.703 + 0.25 P/D 2a = 1.27 3T2 b = 1.0 1b = 0.65 + 0.1 P/D 2b = 1.0 3Q1 0 0.200 P/D 1
0 .240 P/D - 0.12 2o 0.247 P/D - 0.0167 3Q2 d = 0.70 + 0.31 EA R 0 ' 9 1d a 0.50 + 0.165 P/D Pd 1.04 3TCX TOx 0.0725 P/D - 0.0340 EA R 1
TOx= 0,0833 P/D - 0.0142 EA R 2Tax = O.0 3rQCXox = [0.0185 (P/D)2 - 0.0166 P/D + O.005941S~/EARII3
x 0.0335 P/D - 0.094 EA R 1/ 2 2Qcx a 0.0 3SRMAX k =0.8Sinus full-scale trial data (see Figures 5 and 6 of
reference) indicates actual thrust and torque in thetransition region less than the maximums derived fromthe propeller series data, the factor k is applied toTO and O,, in the transition region. Th e factork is not applied to To, and Q.
33k% I'
wq-
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
41/79
SUBROUTINE CAVKTQAPD2 Ap/D 2 /2 = Constant for calculation of TO and Q.j J advance coefficient from input arrayOPEN WATER KTo= input values of open-waterKT KQ - 0Qo thrust and torque coefficientsSIGMA a cavitation number from input arrayKT KT thrust coefficient as f (J, a)KTo or KTm, whichever is smaller
KT m TO m (1/2 Ap/D 2 ) (j 2 +4.8'1)"Tom - (k a CO. 7 Rb ) or (Tox),whinhever is greater
"LC 1.tharacter Identifler for propelleccavitationC indicates more than 10% back cavitationfor Gawn props: >0.494 O.7 RO8 8* indicates thrust limit due to cavitationKT " KTJT T
KQ KQ = torque coefficient as f (J, a )= KQo or KQm, whichever is smaller= QQm (1/2 Ap/D 2 ) (j 2 + 4.84)
i.cm =(k o cO. 7 Rd) or (QOx),whichever is greaterKT m and KQ, generated by Function TQMAX
,.. , CALCOMP PLOTS: If IPLOT=2, open-water KT and KQ as well as KT andKQ representing the transition region and fully"CO O cavitating region at ca:ho are plotted as a function
of J.. 34
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
42/79
NAME: FUNCTION TQMAXPURPOSE: Calculate maximum thrust or torque ooefficient in a
cavitating environment as function of cavitationnumber and advance coefficientCALLING SEQUENCE: X TQMAX (SIGMA, JT, ITQ)INPUT:
SIGMA U = cavitation numberJT J = advance coefficientITQ i = 1 if maximum thrust coefficient requiredi = 2 if maximum torque oooffioient required
Variables: a, b, c, d, Tc, QCx, k, 1/2 Ap/D 2generated by Subroutine CAVKTQ
OUTPUT:TQMAX K or K depo.nding on value of iTm Qm
Tcn = maximum thrust load ooefficientSk a a b. or TC if greaterKT = cm (1/2 Ap/D 2 ) (J 2 +4.84)I ~M QC M = maximum tyrque load coefficientzfi k c 0 .7R , or Qc if greaterItQcm (1/2 Ap/D 2 ) (JP,4.84)QM
i,
35
'W7*l4 *W
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
43/79
NAME: SUBROUTINE PRINTPPURPOSE: Interpolate for propeller performance at specifiedvalue of (1) dvance coefficient J, (2) thrust
loading KT/J 2 , (3) tor uk loading, KQ/J 2, or(4) power loading KQ/J5.CALLING SEQUENCE: CALL PRINTP (IP, PCOEF, SIGMA)SUBPROGRAMS: TOMAX, YINTEINPUT:IP Option 1, 2, 3, or 4
PCOEF input propeller coefficient,dependent on value of IPJT = advance coefficient, input if IPuIKT/J2 a thrust loading, input if IP=2KQ/J 2 V torque loading, input if IPz3KQ/j 3 = power loading, input if IP:4
SIGMA a cavitation numberNJ nj number of J values defining propellercharacteristicsJT J array of advance ooeffioient, inascending orderKT KT o array of open-water thurstcoefficientsKQ KQo array of open-water torque0coefficients
PERFORMANCE AT SPECIFIC J:JTP JT input advance coefficientKTP KT thrust coefficient at JT= opeh-wator thrust coefficient,interpolated from input array of
KT versus J, or maximum thrustooifficient in cavitating regimeKT calculated by FunctionPrqAX, whichever is smaller.KQ P KQ torque coefficient at JTopen-water value interpolated from
KQ vs J, or maximum cavitationva~ue KQ calculated from TQMAX,whicheve" is smaller36
I' "11
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
44/79
V ...... ... ....
I.'.
, SUBROUTINE PRINTPIPERFORMANCE AT SPECIFIC LOADING:
PLOD ln(KT/j 2 ) if IP=2 natural log ofln(KQ/j 2 ) if IP=3 input loadingIn(Kq/j3) if IP=4 coefficientXLOG ln(KT /J 2 ) if IP=2 array of natural logsln(K /Jo2 if IP=3 of open-water leading3n(N/J it IP=4 ooeffiocent at J value
from input arrayJTP JT X open-water advance coefficient interpolatedfrom array of open-water loadingcoefficients versus J at the specificloading required (logs are used because ofthe rapid change of loading coefficient atlow J's)If JTo is in non-oavitating region (KTo< KTm)KTP KT thrust and torque coefficients at JToKQP KQI interplated from arrays of KTo and KQo vs J
If JTo is in cavitating region (KTo > KTm)XLOG ln(KT /j 2 ) if IPm2 array of natural logsln(KQm /j2) if IP=3 of loading coefficientsln(KQm /J3) if IP=4 based on KT orKom as funoTion JJTP JT = advance coefficient interpolated from arraym of ' cavitation loading coefficients vs J at
the specific loading requiredKTP KT) maximum cavitation thrust and torqueKQ P KQ coefficients at JTm calculated from TQMAX
OUTPUT:JTP JT final advance coefficientKT P KT final thrust coefficient at propellerperformanceKQ P KQ final torque coefficient pointspecified byEP n0 = propeller efficienc PCOEF and
2 JT KT/(2 Tr KQ) SIGMA
37
I I I I
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
45/79
SUBROUTINE PRIMTP
TALIC T thrust load coefficientM KT (A./D2 ) (J 44 84)]
S107 a .R - cavitation number based on velocityat 0.7 radius of propeller- ~ (Z +4.84) 4.84-(0.77T) 2
XSIG7 4 94 c 0.88 - term representing 10% back cavitation line forM.R Gawn-Burrill propeller series
LT - 1 character identifier for propeller cavitation*indicates thrust limit due to cavitation:KT -KT m
C indicates more than 10% back cavitation forGawn-Burrill propellers, but less thanthrust limit cavitation> 0494 0.88T co 494 aO 7R
38Lu.IA-W- = w M
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
46/79
NAME: SUBROUTINE TPLOTPURPOSE: Generate CALCOMP plots of thrust versus speed for(1) thrust required in various sea states(2) thrust limit at maximum rpm of prime movers
(3) thrust at torque limit of prime moverswith one or more gear ratios(4) thrust at 10% back cavitation, if IPROP 1CALLING SEQUENCEs CALL TPLOTSUBPROGRAMS CALIOMP Routines, FACTOR, PLOT, AXIS) SYMBOL,NUMBER, FLINE, DASHLINPUT:i
TITLE - identification to be printed at top ofgraph 80 characters maximumV KT VK - array of ship speeds in knotsE13 H /3 a array of significant wave heights in ft.NV n - number of speeds -- maximum of 20SNWH n. - number of wave heights -- maximum of 5NE ne - number of points defining torque limits of[ prime movers -- maximum of 10NGOR ng - number of Sear ratios -- maximum of 4T T = matrix of values for thrust required as
* function of VK and H1 / 3TC Tc - array of thrust values representing 10%
back cavitaiton, if IPROP a 1TN TN w array of thrust values at maximum rpm ofN prime moversVQ V U array of speeds in knots at which torqueQ limits are definedTQ T - array of thrust values corresponding toQ torque limits of prime moversGR m - array of gear ratios
I,t
39
miTi
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
47/79
OUTPUT: SUBROUTINE TPLOTX-axes Ship speed V in knots
Ship speed V In m/secY-axes Thrust in lb
Thrust in NCurves (1) Thrust required at each wave height H1/3
(2) Thrust at engine rpm limit, for each gear ratio(3) Thrust at engine torque limit, for each gear ratio(4) Thrust representing 10% back cavitation (dash line)Intersection of Curve (1) nd the lower of curves (2)and (3) represents the maximum speed obtainable at eachwave height and gear ratio.
't.
40
min,
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
48/79
NAME SUBROUTINE HPLOTPURPOSE: Generate CALCO0P plots of significant wave height versuaspeed corresponding to
(1) endurance limit of crew for 4 to 8 hours operation(2) endurance limit of crew for 1 to 2 hours operation(3) power limit of propulsion system for 1 or moregear ratios
CALLING SEQUENCE: CALL HPLOTSUBPROGRAMS: CALCOMP Rout ins FACTOR, PLOT, AXIS, SYMBOL, NUMBER, FLINEINPUT:
TITLE a identification to be printed at top of graphmaximum of 80 charactersVK T VK = array of ship speeds in knotsH13 HI / 3 a array of significant wave heights in ftNV nV - number of speeds -- maximum of 20NWH nf - number of wave heights -- maximum of 5NGR nu - number of gear ratios -- maximum of 4HIOG H - array of significant wave heights as functionof V corresponding to average 1/10 highestvertical accelerations of 1.OgH150 Hi~b - array of signifoant wave heights as functionl.g of Vx c orrsodlnsto vertical
acceleration of 1.5gS/ VKTW V- array of maximum ship speeds in knots as
max function of H derived from intersectionof required t ust at each wave height withthrust curve at engine rpm or torque limit,whichever is lowerXACC Xace distance forward of transom in ft at whichaccelerations have been computedGR m a array of gear ratios
441
7141/
* p * '
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
49/79
OUTPUT: SUBROUTINE HPLOTX-axes Ship speed V in knotsShip speed V in r/secY-axes Significant wave height H 1 3 in ftSignificant wave height H i mCurves Wave height envelopes representing average/10 heighest vertical accelerations of(1) 1.0 g - habitability limit for 4 to 8 hours(2) 1.5 g "" habitability limit for 1 to 2 hours
(3) ) Envelopes of maxi.mum speed versus wave height(4) due to power limit of the propulsion system,etc.) fo r 1 to 4 gear ratios
4.1
42
:X i~.... ......... g::,,
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
50/79
NAME: SUBROUTINE PRCOEFPURPOSE: Estimate propulsion coefficients for planing hullwith propellers on inclined shaftsREFERENCE: Blount, D.L. and D.L. Fox, "Small Craft PowerPredictions," Western Gulf Section of the Society ofNaval Arohitects and Marine Engineers (Feb 1975)CALLING SEQUENCE: CALL PRCOEF (FNV, TDF, ADF, TWF)SUBPROGRAMS: MINP, YINTEINPUT:
FN V FnV z speed-disilacement ocefficient,V(g V 1 )1/2OUTPUT:
TDF 1-t a thrust deduotion factor""total horizontal resistanoe (RTJi total shaft-line thrust (T)
ADF a appenIdage drag factora esistance of bare hull (Rb)
resistance of appendaged hull (R.)TWF 1-w u thrust wake factor = torque wake factor
PROCEDURE: 1-t, 1-w, and na interpolated from following table ofvalues at input value of Fnv . Th e tabulated datarepresent mean values from a bandwidth of data colleotedfor numerous twin-screw planing craft and reported inabove reference.
FnV 1-t 1-w ta0.5 0.92 1.05 0.9511,0 0.92 106 0.9481.5 0.92 1.04 0.9422.0 0.92 0.99 0.9342.5 0.92 0.97 0.9253.0 0.92 0.975 0.9133.5 0.92 0.98 0.9004.0 0.92 0.975 0.885
43
I I,4*1 III.,~.d~flW., ,.Ae.~'W WII, I
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
51/79
NAME: SUBROUTINE PHRESPURPOSE: Estimate the bare-hull, smooth-water resistance of ahard-chine planing hull from synthesis of Series 62and 65 experimental dataREFERENCE: Hubble, E.N., "Resistanoe of Hard-Chine, Stepless
Planing Craft with Systematic Variation of Hull Form,Longitudinal Center of Gravity, and Loading," DTNSRDCReport 4307 (Apr 1974).Figures 9 and 10 of DTNSRDC Report SPD-0840-O0 (Dec1978, Revised Aug 1979)CALLING SEQUENCE: CALL PHRES (DLBS, FNV, SLR, DCF, SDF, RH02, VIS, RLBS)SUBPROGRAMS: DISCOT, YINTX, C1DSFINPUT:
DLBS A z ship displacement in lbFNV Fn V a speed-displaoement coefficient (V/(g/VI/3)I/2SLR Lp / V1/3 a slenderness ratioDCF 01oorrelation allowance; may be 0.0SDF SDF a 0.0 corresponds to mean resistance-woight R/Wcurves derived from Series 62 and 65 data1.645 corresponds to minimum R/W curves
can be varied to approximate R/W for apartioular hull form from model experimentsRH02 0/205 water density in lb x seo2/ft 4VIS V a water viscosity in ft 2 /seo
OUTPUT:RiU R; a bare-hull, smooth-water resistanuo in lb
a (mean R/W - 3DF x c) x AH ci a standard deviation of Series 62-65 data frommean R/WPROCEDURE:
XFNV array Tabulated values of Fn, from 0.0 to 4.0ZSLR array Tabulated values of Lp/Vl/ 3 from 4.o
44
, f', , . . . . , 0V~.h j
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
52/79
SUBROUTINE PHRES
YRWM matrix Tabulated values of mean R/W as f(FnV , Lp/VI/ 3 )for 100,000-lb planing craft derived from Series 62 and65 experimental data. See Table 1.
YWSR matrix Tabulated values of mean wetted area coefficients SiVfrom Series 62 and 65 hulls. See Table 2.SD array Tabulated values of standard deviationa as f(FnV)See Table 1.RW M R/W for 100,000-lb planing craft interpolated from YRWMmatrix of mean R/W values at input FnV and Lp/V' 1 / 3WSR S/V 2/3 interpolated from YWSR matrix at input FnVand Lp/V 1 /3
Subroutine DISCOT used for the double interpolationSD M a interpolated from SD array at input Fn7
Function YINTX used for single interpolationRWM (RIW)m corrected R/W for 100,000-lb planing craft(mean R/W interpolated) - (SDF x a)DLBM Am C displacement of 100,000-lb planing craftXL - linear ratio of actual ship to 100,000-lb2 (A/Am)1/ 3VFPSM Vm = speed of 100,000-lb craft in ft/seo
X (input Fnv) x 19.32VFPSS Vs speed of actual ship in ft/seo Vm X1/2PL M Lm = length of 100,000-lb qraft in ft= 11.6014 (input Lp/ VI/3)PLS Ls - length of actual ship in ft n LmREM Rn m = Reynolds number of 100,000-lb craft= Vm Lm/ VmRES Hns Reynolds number of actual ship = V- Le/vsCFM CF m * Sohoenherr frictional resistance coefficientfor 100,000-lb craft
45
a-. wl
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
53/79
SUBROUTINE PHE~S
CFS CF3 Sohoenherr frictional resistance coefficientfo r actual shipFunction C1DSF used to obtain Sahoenherrfrictional resistance coefficientsSM sin wetted area of 100,000-lb craft in ft2
-134.5925 S1 V2 /3SS Ss wetted area of actual ship in ft2 mS, X2RM Rm a resistance of 100,000-lb craft in lb
- (R/W)M amCM CT M total resistance coefficient of 100,000-lbCT, craft
CR CR m / Vm2Sm pm/2)CH CR aresidual resistance coefficient
CT,- Cp.,CTS CTs a total resistance coefficient of actual ship
= Cys +' R + ACFVIS Vs =kinematic viscosity for actual shipVISM V, a kinemiatic viscosity for tabulated data1.2817 x 10-5RHH2 1052 =1/2 water density for actual shipRH02M em/2 U 1/2 water density for tabulated data
a 1.9905/2RLBS Rb Cresistance of actual ship in lb
2CT5 V3 S. s/2
46
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
54/79
NAME: SUBROUTINE SAVITPURPOSE: Estimate the bare-hull, smooth-water resistance andtrim for a hard-chine planing hull using, Savitsky'sequations for prismatic planing surfacesCALLING SEQUENCE: CALL SAVIT (DISPL, LCG, yOG, VFPS, BEAM, BETA, TANB,COSB, SINB, HW, WDCST, RHO, VISO AG,DELCF, R, TD, NT, CLM, 0DB)SUBPROGRAM: CIDSFINPUT:DISPL A=ship displacement in lbLCOGr distance of center of gravity CG forward
of transom in ftVCG KG =distance of CG above baseline in ftVFPS V zspeed'in t/secBEAM B x beam inft= maximum chine beam BpXBETA 8 z deadrise angle in dogree3=de'adriss at midships $mTANB tan BCOSB 00s8SINB 33.n BHW MW =hoight of center of wind drag abovebaseline in ftWDCST CDWI horizontal wind force in b /V2RHO P =water density in b x seo2/ft4UIS v= kinematic viscosity of' water in ft2/seoAG g acceleration of gravity in t/3ec2DELCF ACF ucorrelation allowance; ma y be 0
OUTPU7:R Rb bare hull, smooth-water resistance in lb
F 47
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
55/79
SUBROUTINE SAVIT
TD T = trim angle in degreesNT Number of iterations to obtain trim angleCL M A - mean wetted langth-beam ratio Lm/BGD B - longitudinal center of pressure, distance
tforwa,'d of transom, in ftPROCEDURE:
TD trim angle of planing surface fromhorizontal in degfirst approximation of: LIt egCV CV Z speed coefficient = V/(gB) 1 /2CLM = mean wetted length-beam ratio= Lm/B = (LK + LC)/2BCLO CLo = lift coefficient for flat 3urfaee
(0.012 X + 0.0055 XS/ 2 /Cv2)CLB CL= lift coefficient for deadrise surfaceL 6 /[V2 B2 p/2]= CL.-0.00 6 5 CL0 0.6
CL, and obtained by Newton-Raphson iterationfirst approximations: CLo = 0.085; X= 1.5
XK 11 wetted keel length in ft[ 8(X+ tan $/2 IT ant
XC LC wetted chine length in ft : 2BX -LKLK- LC = (Btans )/ ( TtanT
GD B AP longitudinal center of pressure forward oftransom in ft-[] B ?[0.75 - 11(5.21 CV / 2S+ 2.39)]
CLD CLd dynamic compnoent of lift coefficient- 0.012 X1 / 2 '1i.1VM Vm mean velocity over planning surface in ft/sec
- V [1-(CLd - 0.0065 CLd 6)/(X cosTJl1/2
BE R : Reynolds number for planing surface- VmB A /v
48
.- .4: , '- .
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
56/79
SUBROUTINE SAVITCF C + AC Schoenherr frictional rusiicgnoe coeffoientas f(Rn) plus correction allowarceDFX DF viscous force due to wetted surface,parallel to the planing surface, in lb
- (CF+ACF) (0/2 (Vm 2) (B2 Xl/oso )CC K 1.5708 (1 0.1788 tan2 0oos0 -0.09646tanp sin28)CKi CKI CK tan T/sin$Al al " [in 2 T(i-2CK) + CK-ts2t(i/sln28"ein2T)Jl/2AN al IS +(aliCK1 )/(aii I
cos T + Cy tan T sin TTAN tan (4ICKI)/(1-al CK1)THETA B angle between outer sp!,:,y edge and keel inradians
- arotan(tano oos$ )DLM A,- effective increase in length-beam ratio dueto spray[tan$ (TrtanT)j- 1/( 2 tane ) /(2 oose )
Rn Reynolds number of sprayS - VB /(3cosB sill 6 ) /VCF CF- Sohoenherr frictional resistance coefficient
for spray dragDSX D= viscous force due to spray drag, parallel to
the planing surface, in lb-CS (012) V2) (B2AX / cosB )
DWX Dw component of wind drag parallel to planingsurface in lb4 - CDI,' V2/oosT
DT X DT total drag force pa"allel to planing surfacein lb= DF + DS + DW
PDBX PT 2 total pressure force perpendicular tosurface in 3b= A/cost + DT tanT
49
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
57/79
SUBROUTINE SAVITEDB ep moment arm from oenter of pressure to CO in ft
FF fF moment arm from center of viscous force toCa in ftS- (B tan 0/4)
FW fw moment: arm from center of wind drag to COin ftK - HW
RMT EtM a sum of momenta about CO In ft-lbPT OP + (DF+DS) fF + DWfW
Iterate with small ohanges in Tuntil EM O.0016NT Number of Iterations required to obtain equilibriumtrim; maximum of 15 itrrationsR R 2 net horizontal resistance force in lb
a DT 003T + PT sin*
50
0r.
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
58/79
I:NAME: FUNCTION C1DSFPURPOSE: Calculate Sohoenherr friotional resistance ocefficientCALLING SEQUENCE: CF CIDSF (XN1RE)INPUT:
XN1RE Rn Reynolds number = V L /v* OUTPUT:I C1DSF CF Sohoenherr frictional resistance coeffioient
PROCEDURE: Iteration with Newton-Raphson methodSohoenherr formula: 0.242 /- ig1091 Rn CF
51.0. S-..,~~~. . . . . . . . .~~~. .... :. - -t.'... --- m nM.i ~ E~~4.',. m U,,1 i ,.,,:.
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
59/79
NAME: FUNCTION SIMPUNPURPOSE: Numerical integration of area under ourve defined byse t of (x,y) points at either equal or unequalintervalsCALLING SEQUENCE: AREA SIMPUN (X', Y, N)INPUT:X array Table of x values-- independent variable -
x values must be in scending orderY array Table of y values--dependent variable1N Number of (x,y) %alnes
OUTPUT:SIMPUN Area under nurve f fy e'x
52
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
60/79
NAME: SUBROUTINE DISCOTPURPOSE: Single or double interpolation for continuous ordiscontinuous function using Lagrange's formulaCALLING SEQUENCE: CALL DISCOT (XA, ZA , TABX, TABY, TABZ, NC, NY, NZ,
ANS)SUBPROGRAMS CALLED: UNS, DISSER, LAGRANThese subroutines are concerned with the interpo-lation, and are not documented separatelyINPUT:
XA x value (first independent variable) for interpolatedpointZA z value (second independent variable) for interpolatedpointSome as x value for single-line function interpolationTABX array Table of x values--first independent variableTABY array Table of y values--dependent variableTABZ array Table of z values--second independent variableNC Three digit control integer with + sign
Use + sign if NX - NY/NZ w points in X arrayUse - sign if NX - NYUse 1 In hundreds position for no extrapolationabove maximum ZUse 0 In hundreds position for extrapolation
above maximum ZUse 1-7 in tens position for degree of interpolationdesired in X directionUse 1-7 in units position for degree of interpolationdesired in Z direction
NY Number of points in y arrayNZ Number of points in z array
OUTPUT:ANS y value (dependent variable) interpolated at x, z
DISCOT is a "standard" routine used at DTNSRDC.Consult User Services Branch of the Computation,Mathematics and Logistics Department for additionalinformation.
II5
! 53
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
61/79
NAME: FUNCTION MINPPURPOSE: Select index of minimum x value to be used forLagrange interpolation, from an array of x valuesgreater than requiredCALLING SEQUENCE: I -MINP (M, N, XA , X)INPUT:
M m - number of points required for interpolation ofdegree m-lN n - total number of points in x array > mXA x value to be used fo r interpolationX array Table of x values, must be in ascending order, butneed not be equally spaced
OUTPUT:MINP Index of minimum x value from the array to be used byFUNCTION YINTE for Lagrange interpolation ofdegree m-I
SAMPLE PROGRAM USING FUNCTIONS MINP AN D YINTE:DIMENSION X(1O), Y(10)N -10M -4READ (5, 10) (X(J), J-1, N), (Y(J), Jul, N), XA"I w MINP (M, N, XA , X)fA - YINTE (XA, X(I), Y(I), M)
ALTERNATE PROGRAM USING FUNCTION YINTX:DIMENSION X(1O), Y(1O)N -10M -4READ (5, 10) (X(J), Ju1, N) , (Y(J), J-1, N), XAYA - YINTX (XA, X, Y, M, N)
The result from either program is the same. In either case, only theM points closest to XA are considered in the interpolation formula. Thefirst combination should be used whenever several dependent variables areto be interpolated at some value of the independent variable, since MINPneed only be called once. FUNCTION YINTE may be used alone wheneverN=M.
54.1
,'
.,a.,,. . . . . .- .,i''",- -. .;
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
62/79
NAME: FUNCTION YINTEPURPOSE: Single interpolation of degree n-i for functionrepresented by n (x,y) points using Lagrange'sformulaCALLING SEQUENCE: YA - YINTE (XA, X, Y, N)INPUT:
XA x value (independent variable) for interpolated pointX array Table of x values--independent variable
x values can be in either ascending or descendingorder and do no t need to be equally spacedY array Table of y values--dependent variableN n * number of (x,y) values defining the function
OUTPUT:YINTE Interpolated y value (dependent variable) derivedfrom Lagrange formula of degree n-I
For example, when n - 4, cubic interpolation isperformed
Lagrange's Interpolation Formula
(x-x 1 ) (x-x 2 ) . . . (x-xn)Y" (x _Xo-1)xo-X 2 (x0,X-n) O(x-x0 (x-x) , ., (x-x)d
+ (-XO ), (X-Xn) Y2l
(x-xO (x-xI) (x-x ) . . . (x-xn+ (x 2 -x 0 ) (x 2 -xI) (x 2 -x 3 ) , . . (x 2 -xn) +2
(x-xO) (x-x 1 ) (x-x 2 ) . . (x-xnS 0 nl) 1 n2 n-l
K (
55i! sv/ !t
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
63/79
NAME: FUNCTION YINTXPURPOSE: Single interpolatiou of degree m-l fo r function
represented by n (x,y) points using Lagrange'sformula. If n > m, only the m closest points areconsidered in the interpolation formulaCALLING SEQUENCE; YA a YINTX (XA, X, Y, M, N)INPUT:
XA x value (independent variable) fo r interpolated pointX array Table of x values--independent variable x values mustbe in ascending order, bu t need not be equally spacedY array Table of y values--dependent variableM m w number of (x,y) values considered fo r th einterpolation process of degree m-3N n w otal number of (x,y) values > m
OUTPUT:YINTX Interpolated y value (dependent variable) derivedfrom Lagrange formula of degree m-1
FUNCTION YINTX may be used instead of FUNCTION MINPand FUNCTION YINTE togetherSee Sample Programs using these three functions
56
,77,. iI.I I..I. .II.
."
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
64/79
APPENDIX BSAMPLE INPUT AN~D OUTPUT FOR PHPRIM
57
W, nn
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
65/79
to.
dc z
L; 0 , 0 6 0' 0' 0A
z Iul e N 9' 0*ccC OC
14 (z 1SLAn 0 ; 00 o C eea- -j
N orIfl 4NC.-CC S 0 0 -0P:LA % 00 x e o"IC 0. 6 *
0 ~ ~ ~ ~ . OM c kJ- N N mi4hX CLUCLAJU 0 -a. iica.9 0 JJ 1 1 A .LiC*tj- L2 g 0 f0~~- 0 ~~0..kou .0 - e'000 50 0
- w' m -4 4a*z a a C 0 CLCL 30 30 1. 00. P-4.~0.. t~
t 58
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
66/79
0V 0 a
N $ 0N 0 0
o 0 N0 0 0
0~ a;NA Nn (P.
N i
og 0
maz r4
o 0 0
o (q 0
ILAwN
o - 0 0N 0 N 0
0 In1- o aF0 0 0 0 0 0
u O to to 0Ato 0 Nnto in-a - -
N z~c- 00 0 0 0 59
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
67/79
..4*p
UI a4 01 Ci* 01* *, -
w ACL i
*0 1140 - I , VV9 m 4 L - mI* n L
*Um U!
14 0 nI0 0
* 0IL 0
he* -41M 0 0 0w.uii
a 5 o i n p Q k
Ix4IA IDL 0 0 0 0
zn cc -T M N w 0 (4m A flm-.LrI4lC4lhf 4flw4(LI U
I Ix
w*I 0 0 C. 0 0 0 0 0 0 0
N 0.(q itOT UN In tonz - N-a (0 I. I IA
* r -0
.. L. . ..
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
68/79
w 0
CL C;06 (q C
* o 03 0' N m N -o c t- N to (14 t-t a. w 0- fS N ; CD WN v N CP to m'
-C -9 ClD t- too 0 - O 0 0) 0 too t, " 0 t - t ) m0 Ch
ftm
*0 0 t- M M 0 t-V V W't* ~~ ~. . . .o . . . C. .- .o .o . .
C4 0. 0 N Clty V) mD I'-0 0 M)> - - - - -.3l t
LL 3L 0 0 0l 0 0 0 0) 0 a* N a0 Cl 0Nf ri) C4 U) 0 N) 0) 0 N CN CN N C0) Im M7 m 0 a) alluJ . . . . . . .Wf 1. 0
0. c0
Z. In ~ 0 N It to- 01F 0 tNN C4* C,L 00
41 t- N' q1-') Nl0q- mLA.. 4 ) U 4 4 4 q 4 Cl C4 C4wf UU' W 0)aa a) a o) o) o) o) o o o o
0. 44 N C4 N"1OfO
a.0
C) to I L) U o U) U 7 N 0 a 0 C. C. C.C- 0 0 ) 0 ) 0 ) 0C 61
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
69/79
r.I0000000O c.)0OOOOOOOOO0 OO0 OOOO0oO.0 -------
og ~000M0R0T0N0 0000001- 0000n-t0MMMM00 1 0 00 000 000L f 00MM00
aL U 00 MM 00 t-t~- E n'r m) N N ----- - 0l' iI ,t n 1MNL 1i 04 -- 0 01C' tO~EDU) C(1) O-O alM - to--- --- -- 00000.0 . . . . . . . . . . . . . .
to 0 M - --l W V C4 4-
100 04 Clr'-0 h fl-rVinto0
c. .W0M
0 .CL -W ~ - w - - N m- i o o O O t
WO Wo EL0 00 000000-00--0NN00"M0 MA m;,q00 irti0inin n G00 o D00 E E000toU:
UICL(A u.
W 0 00 0 00 0 00 00 0 00 0 00 00 0 0 -0000cJ w
-j zO 3a. I z a0 00 111
62
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
70/79
is 0 " Da n Ga aa a00 ~~ )0000--------------- W-- - W 0 0 CU(0---oooo ooo oo o o oo00 oLoooo rNlo -003000000000000000000000000000000000"000
oU U
0 m v v v v v 0n 0n 0nn0n inn 0 0 0 0- 0 0- 0- 0 0W 0 0n0 0D0 0M 0 ( 0 0 0 0o
""00ooc0ooooooooooooo000000000000OC000CA o00
I- 0L.0 XOOO0 OO 000OaC .PO)(TaOO a 0000 ----- 0-0000NC)LA 0i-CY0"N00C ---
00 00000000000000000000000000000000 000.)0000I0
S0 .000000000000000 0 0000--0
in . . . . . . . . . *.O L
vim 00000000000000000000000000000000--0-0-000
0m OLA W000000000000000 N UC U --
I0 0 0410000ton CI0 00m00 If00000000 . 1 Cf 4U.L...O0...
41 0 0 0 0 0 0 0 -------------------------- ---- ( --
0 0 0OOOOOOOOOOOOOOOOOo0OOOOOOOO --- -- 000
.. , , 0 . . . ., . . . ... ... .... 0 , , . . 0 . . 0. 0.
0, 00L O. 00 00 0000000000000) 0000000000000000000000000000000000000000000
. .0 . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..
W - O O0 0 0 0 0O O O OO0O 0 0 0 - - - - - - -- -: :-
-j0
.~000000000000000------------------000003
W IrC NOOOOOOOOOOOOOOOOOOOOO-----OOOOOcN --------- 00 000I
.0 CY* (DUo o o o o oo o o o o o o oo o o o o o
-j 0
in Ln 000000000000000000000000000000000000000000ty IIc 0. - 4n . a . . . . . . . . ... . . . . .. .~ . . . . .. .. . .. . . .0 ..400 0
CC- 'a rr'' L 'I D "r MI n- 0 (DTL L L AAA AA A A L UL A A = O 0 m - i0 () Il InM N0 cW Ln I - 0 M D0 x 00000000000000000000------------N000-----------------000
CL I -0.~ ~ 0 I'm m m m-- - - 0S . a a. . . . . . . .. . ...a.a.a. .a. ...a. . ..0. .
.1 0A -A -, IN NILA 1A 0AA LIn L -I C4n t- 0 N In r- n' 14in t- I L 4 in 1-) 0 N)( in -0 U,4 n N 0 c-4 In r,0~0000000000- -- - N0------------NC)NCMC)V1 Z In I n(N-----------V-r---------- 00 D0 )L63
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
71/79
00
*~ OD co in 14 v r' m 0 01 0 - 1C, 1Wn In) w IN at to t- I n 010* ~U M W IN M - - 0' Ny 1--- 0 w* N*jIII I D : ) C - t n U D t D (
z
0; 0;n CA m'4 ON ( 1 m 0; -;I * -. -1 -n - - - - r- 0
r, m1o t- Nnn m, m1 t'1- m1 0o 0nz IN - INNIo c N N N -
* ~ ~ in m1 0 0 w- N In N1 01 wCL on 01 to t- 01 t- in 04 In t- t- t- to In
0.a*N Op 01 01 D1 D 01 04 0n 01) v1 0 01 01 01) M0 0 0 0 0 0 a 0 0 0 0 0 0 0
IMlCI WI
I 01 0. In In In n I I nC In In In in In In n I
.n . . . . . .
CoI 01 In 0f EN inl 0 In Iq C141 n IN In I-II 0. In41 - 10 t - -. IN on NIn I - In nn uDc n In In In In In In c in In) OD In In In'.
P* N. O4 t- 1 t11- In t r- I- 1 0 0 0 1IN. CD 0) O In l1 0 C In 01 0 CD- 0 00 In
0,~ (NI mN vN IT M (.4 mN -T mN m' m (NU.1
UJIorI) * n ) , V M I
0.Co00.1.
Ix
C6
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
72/79
OV 0 Of'D W m'atI 0 m0 N Ow cna)o 0qVmCnU1 i0Uq GOWc0 C4 C t- CO (a 104( 0 ato( Tor-r 0 O q MNi 0vqq oS. . .. . . . . . . . . .. . . . .00 N-0 0(0 N-r0 0 CVV C
* O* N q0 0-t'N(NIfl C Pmin w 0CD W M 0nt4.Wif% 0 to m mtU 00 g 0 0 0 004l 0C401(" 0110907fl 0( 197(')
S0 0 0 0 0a mO U 00000 00000 00000 00000 00000 00000 00000
S. . . .
0 0 0 0 0x00 0*: ,o .* 0, o o .. S
. .
o m0 0n it to. .
(n
LAf -l 0 0t00 0O ~0 WCIf ntr qWwr t-l M~ WOUr
Z. I 00000 0000 c00000- 0r0000- 00000O~( CN!-- 0 oO
- ft 0 r00000 0 000 t6I0000 0 4 11;
0 (400 0000 0(06 O0000 0001000N, N' C4 mmmmOD+ q V0 01+1 i ni D( D -t -t. r... .....
o t%z I
-. ~ ~ 44 I_; MC2(1(q 0; Mitt~lODO1~tt-cr M 0t-4. u in
;t G om nm n- in I -10;t 7V r, w,-C to wq 1- (3) IT N-'t U *
1f 11 0 - c 00 0)t. r%OCO O)f 0cN 5 L Or-.C'tot i 0('4n-T-T1f1i Ot-t~o Cto Lnegt-
4W 9 . . . ..0 . . . LS ". L.U.L1 V ni n
Q. in CDS LrflItDI- Cl fAt-t- (Din T-T qm4C V fnC- 4 C1 iVIT-m o innf4. .00 . . . . .
10vT O M -ttin t to Kr to M CINL 0 (-to w IT 0 O 0C 17DN to v 0OmCo
ftT WCV 0 in)I'fOIlftot t t%- O cu0C) -Co m01CYto to -t0 $UIDt.
0~~~~~~C N N' N N N-N -- NN'CCN'INC4' ('NC NN'4''CJ'Cd'dN(e'CN d'0000 0000 0000 000000 00000 00000
tof 9 C!C Ct . . . . . .... . . . . . . . . . . . . . . .0
C),n 1- 0 0 0--M O t DOw r - -% -zt -W t ot o.m . . . . . ..0
(r r- m m N 0 r~-to O t t MRoWinmtoI-nt- rC4a1L mfloutmin mcu am T m mtft V)C )mi -G oC M .to
xee0n My m ino m~Io N or-0oto MV ntot- 0incw0 -N~I ~ l 5 0.qt Di t %i Ot.. J f- N 0 000 0---- 00000C*I' 00000'(' 0 000dC0 ~
95 . .-Ofto
x 0 -. Ma 5 (A- o minO(DW a - ino 00W- i C Mi'00t - M in M Ot vi-OD0*0 000 00000 00000 00000 00000 00.-.0 00000.
7: 3C*I- 00000 00000 00000 00000 00000 00000 00000
-0 -- --11 -.(U' --1l --11 -- 0-M l-- - -ft65
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
73/79
* 8 4 f. Oit 0 .01 .. *. . *.** ~~0 444 0; :CW 0 mmo1V 0 "MIAf 0 t41P1 0 C~6 0 41010 0UNOr
-mU-0 0 0-m 0- , 00WWNWN 0W0Of000 A
0 00 - 00 -0 0 0 ;; 00;
S0000 00000 00000 00000 In n. . . . . . . . . . . .. .....N M NNN N NN N NelN N NelN NN Nr - le 4c lCOcCL
* ..... 0 41t0 0 q0 0 w t. w 0 P. w 0,0 fZ O ;C -
I .e . . . . . . . . 11. .10
06 0 M0t- Om' C4 m V I0 w M 0 N m IT-n w t- 40 :a Comm0000 00-c11M0 0 0 11q W0000 q0 T0!0 T01-00000000-- 0- ------------- --- C-1 - - - - - - - -t -1-
C0 a; ; 00;t: 000--nN00 n C t R a0)0
. . . . . . . .. ... . . .. . ... .
C4e w.0 00 t-14)4) 0 w 0;: qO It41-flIW Is0 C4 n MUWt-W 0111w
0600000 0V000; 0000m0 00000 00toAI mtna
0~~~~~~ ~ ~~ r 0 . ,7. 4mNwt O O nt - r- in-- ----m o
NO MI Jw-Mooo ooooo oooo oooo., 4m m DwI, m oo-x 17qoNm q-0 ix 01 000 0$0in to000www w 00000 wwwwo wot . . . . . . . . . .. ....... . .. . . . . .
0 ,
jnOf 1- 0 - in 0 - ooN0uM ' 10MW~u-*~*1nO 0nm N Ov vIn,-
. I C! 00e 00U000 ;"000 ;01000 00 P4"
* -0 f.0 'l t-m e .t-*?M - 1011q t- a MVO ;l e4w I14 t-0 .0 f- 0 w -00
IDO In m000 m wm0--It 0 - (1M In tMnM~'M?nmC'd(Nto N1) t m0m
- -t o* ? MI ot n oo W t-UJ 00 0 r,M111 M MM cV - 0 0 M q14 t14mM IN4. 1 . . .mev
IV1 .vev evC w m 0 IS-m
11 .If*M 0 m to111111111141114411. m04004m' -w o t-41( Il-In
C! 4* 16o 4-I- f1! I--M40 0 t000 0 000 00000 a-1lN I 1 0-10 0MI 0I110 0MO1M4 040MOV C1111M 0- -11M0n00w 001c000; ,ina
rV 00 0 00 "0 #1 ^ 0 0 0 0 0 00 0000.00000O 04000440 040000 000 0400040 000001 04001000090.. trDvY W IN#40f 0Oltv -0(i-1-.44 110; i)06 f; I*v .. o e, ev-.1I---II 044--1 00.4v- ooooeve oelWONOWe44rv A 4 4 4
SO6
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
74/79
0000000.
V, 00 04c*~ %0 wfWle C!
o 90. . . . . .0 r* I-
Ab -41 OWDS- 4O WNmqwr1
his .1 , . . . .~, . . . . . . . . .4
W6 W. .0
*ox5
hi. .-5 0v -q 5 I~~~ 5"- mt0 * nt t o40 t-t St
sosu-S U
a.t AO ;C ;u p.0 ; 00 J M iU1 M5 o-q0 in n 0 .OD. ncifwmmS
~ S~L C! ---- 0-S* 4 o00I m00mtfn o % sM"0
u'ao
a. 0000 0 0 0
31m 0; C; 944l 1-i0 ;9-50 - - - - ~- r~- Eve4C!I" 0C
It 9
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
75/79
* % woo* - 00
000;00008000000 00 00009 . . . . 99 .9 .9C0 00
*0 C
IC01eIn ot .c.3i4o ~ 0 0in M If(N t- C4 to
% 00
0. 40Ii
W,-0
oo I. mLL)NqWt
0- 0 0 cz
314 0 _5 t. U P4mqw-. 0 M I e4YI0ttD)W~OO ( -T~U~la 0u0AIOV. : w a 0r . .VI .UI. .0 2 ::co 0 C; cr;tt- 00A I-414m w : t -M;MMMMMalbS 110
12. a- 3r - 0I00002.~~~04S*** uJ0n0'w. .D . . . . . . I-
110 no 0 wIDW00W-WIDDLI . x0 a m up 1 0 -jotqoonm 0w s- (pmcot
I* >h4 .-0 0 00 .1 N N. C4000N7 4.0 am i cv w mq n om w 00lm om wCBMa91:0!1 0 O,47 q qrD~f 3 mO NWMVWVW--WW*~- VIOi4 -I Oi-fhl -U C; ~ ID U O 0;9C4C 4(
.9 0 D-OtM'3 -N('II -w o -r
N ev N C00 M M - - - -
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
76/79
2 0
a00 q ~ O~') ttiCO o
*00000000000000m Do0000mot0000. ... . .
tn NN 0aa----- ----- ----- 0 000o tS IDt.-r D0 ,(0 t
- r 0 0r~'~nii.O0DtoI f- vt-mWmo05 40C4 01~
0. .
LL 09c11. 0.. JC! 0_je T* 0 0 q
I~ fo 0 6,;m 4- a 1 AL A0 C64i 0 0I D 0 -- - - - - - - - - - -
wC 2
11. 4.0 0 0IZ -- ciWncci. 0 .0a ww;( ot m rw v m
09 3 aamf0 r0. 2 in :,. r t20 -3 -j C4 -J -- -- -IO
0 ot n a 0t pm MO t-00 t- - t- V~q O N 0 I -%C.. *t u o .j . .
* 0 CV (-0& 0
*l ci 1; 0-00 0 0 0 DU t. to 0 D0t NC
N0 N, NJ N M-- --
* 9.9
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
77/79
0SS
* 6-0th0 0
sq us91 .4145
4 U. 0mu co
an.0 .-4.4' u 2
-a. to 0 mw I Mt Drt0tco6M16W0V MMmN
to.ca oC! I4.10 Z Xow
00.L 6-0 0 0 0 0 0 0
C000000u0 00U.. 0 >zC ;C t 0 4
*i WC'0..i In 06
0 .l 7 -* qgo
CL 01 40
07
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
78/79
INITIAL DISTRIBUTIONCopies14 NAVSRA2 PM S 300T1 9411 5211 52131 52411 03D31 03D41 03F21 03 R1 03R31 3121 31241 31241
50 NAVSEADET Nbrfolk/666012 DDC
8 ABC-17
CENTER DISTRIBUTIONCopies Code
1 11 (Ellsworth)1 1103 Data Bank1 11 21 1171 11 81 151 15 21 15247 1524 (Hubble)I 1532
71
-
7/23/2019 PERFORMANCE PREDICTIONS FOR PLANING CRAFT IN A SEAWAY
79/79
DTNSRDC ISSUES THREE TYPES OF REPORTS1. DTNSRDC REPORTS, A FORMAL SERIES, CONTAIN INFORMATION OF PERMANENT TECH-NICAL VALUE. THEY CARRY A CONSECUTIVE NUMERICAL IDENTIFICATION REGARDLESS OFTHEIR CLASSIFICATION OR THE ORIGINATING DEPARTMENT.2. DEPARTMENTAL REPORTS, A SEMIFORMAL SERIES, CONTAIN INFORMATION OF A PRELIM-INARY, TEMPORARY, OR PROPRIETARY NATURE OR OF LIMITED INTEREST OR SIGNIFICANCE.THEY CARRY A DEPARTMENTAL ALPHANUMERICAL IDENTIFICATION.3. TECHNICAL MEMORANDA, AN INFORMAL SERIES, CONTAIN TECHNICAL DOCUMENTATIONOF LIMITED USE AND INTEREST. THEY ARE PRIMARILY WORKING PAPERS INTENDED FOR IN-TERNAL USE. THEY CARRY AN IDENTIFYING NUMBER WHICH INDICATES THEIR TYPE AND THENUMERICAL CODE OF THE ORIGINATING DEPARTMENT. ANY DISTRIBUTION OUTSIDE DTNSRDCMUST BE APPROVED BY TH E HEAD OF THE ORIGINATING DEPARTMENT ON A CASE-BY-CASEBASIS.