
Pathloss Modeling and Estimation for V2V Wireless ... · Pathloss Modeling and Estimation for V2V...
30
Pathloss Modeling and Estimation for V2V Wireless Communications Carl Gustafson Department of Electrical and Information Technology, Lund University, Sweden - with contributions from Taimoor Abbas, David Bolin and Fredrik Tufvesson 1 / 17
Transcript of Pathloss Modeling and Estimation for V2V Wireless ... · Pathloss Modeling and Estimation for V2V...

Pathloss Modeling and Estimation
for V2V Wireless Communications
Carl Gustafson
Department of Electrical and Information Technology,
Lund University,
Sweden
-
with contributions from
Taimoor Abbas, David Bolin and Fredrik Tufvesson
1 / 17

Introduction
In this talk, I will discuss the pathloss concept, applied tovehicle-to-vehicle (V2V) wireless communications.
I Pathloss - What is it?I Pathloss Models - How should we model pathloss for V2V
scenarios?I Censored and Truncated Data - What happens when there are
missing samples in the measurement data?I Estimation and Results
IEEE VTS Workshop, Halmstad, 2015-11-11 2/17

Introduction
In this talk, I will discuss the pathloss concept, applied tovehicle-to-vehicle (V2V) wireless communications.
I Pathloss - What is it?
I Pathloss Models - How should we model pathloss for V2Vscenarios?
I Censored and Truncated Data - What happens when there aremissing samples in the measurement data?
I Estimation and Results
IEEE VTS Workshop, Halmstad, 2015-11-11 2/17

Introduction
In this talk, I will discuss the pathloss concept, applied tovehicle-to-vehicle (V2V) wireless communications.
I Pathloss - What is it?I Pathloss Models - How should we model pathloss for V2V
scenarios?
I Censored and Truncated Data - What happens when there aremissing samples in the measurement data?
I Estimation and Results
IEEE VTS Workshop, Halmstad, 2015-11-11 2/17
Introduction
In this talk, I will discuss the pathloss concept, applied tovehicle-to-vehicle (V2V) wireless communications.
I Pathloss - What is it?I Pathloss Models - How should we model pathloss for V2V
scenarios?I Censored and Truncated Data - What happens when there are
missing samples in the measurement data?
I Estimation and Results
IEEE VTS Workshop, Halmstad, 2015-11-11 2/17

Introduction
In this talk, I will discuss the pathloss concept, applied tovehicle-to-vehicle (V2V) wireless communications.
I Pathloss - What is it?I Pathloss Models - How should we model pathloss for V2V
scenarios?I Censored and Truncated Data - What happens when there are
missing samples in the measurement data?I Estimation and Results
IEEE VTS Workshop, Halmstad, 2015-11-11 2/17

What is Pathloss?
I In free space, the attenuation in received power due to theexpansion of the radio wave in space, between two isotropicantennas, is given by:
FSPL =
✓4⇡d
�
◆2
= 20 log10
✓4⇡d
�
◆[dB].
I FSPL / d
2, i.e., in free space, the pathloss exponent is n = 2.
I However, a realistic user will experience a multi-pathenvironment, with small-scale and large-scale fading.
Txy
x
z
2
1
3
4
L
Rx
y
x
z
2
13
4
L
IEEE VTS Workshop, Halmstad, 2015-11-11 3/17

What is Pathloss?
I In free space, the attenuation in received power due to theexpansion of the radio wave in space, between two isotropicantennas, is given by:
FSPL =
✓4⇡d
�
◆2
= 20 log10
✓4⇡d
�
◆[dB].
I FSPL / d
2, i.e., in free space, the pathloss exponent is n = 2.I However, a realistic user will experience a multi-path
environment, with small-scale and large-scale fading.
Txy
x
z
2
1
3
4
L
Rx
y
x
z
2
13
4
L
IEEE VTS Workshop, Halmstad, 2015-11-11 3/17

What is Pathloss?
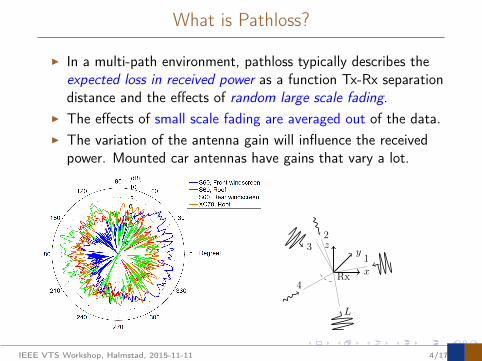
I In a multi-path environment, pathloss typically describes theexpected loss in received power as a function Tx-Rx separationdistance and the effects of random large scale fading.
I The effects of small scale fading are averaged out of the data.I The variation of the antenna gain will influence the received
power. Mounted car antennas have gains that vary a lot.
Rx
y
x
z
2
13
4
L
IEEE VTS Workshop, Halmstad, 2015-11-11 4/17

What is Pathloss?
I In a multi-path environment, pathloss typically describes theexpected loss in received power as a function Tx-Rx separationdistance and the effects of random large scale fading.
I The effects of small scale fading are averaged out of the data.
I The variation of the antenna gain will influence the receivedpower. Mounted car antennas have gains that vary a lot.
Rx
y
x
z
2
13
4
L
IEEE VTS Workshop, Halmstad, 2015-11-11 4/17
What is Pathloss?
I In a multi-path environment, pathloss typically describes theexpected loss in received power as a function Tx-Rx separationdistance and the effects of random large scale fading.
I The effects of small scale fading are averaged out of the data.I The variation of the antenna gain will influence the received
power. Mounted car antennas have gains that vary a lot.
Rx
y
x
z
2
13
4
L
IEEE VTS Workshop, Halmstad, 2015-11-11 4/17

Pathloss Models for V2V
A number of pathloss models have been developed for a variety ofwireless communication systems. A common model for (some) V2Vscenarios is the log-distance power law model:
PL(d) = PL(d0) + 10nlog10
✓d
d0
◆
| {z }Mean pathloss, µ(d)
+ �|{z}Large-scale fading
, d � d0, (1)
I Parameters to be estimated for this model:
1. PL exponent: n
2. Pathloss at the reference distance d0: PL(d0)
3. Large-scale fading about the mean power: � ⇠ N (0,�
2)
IEEE VTS Workshop, Halmstad, 2015-11-11 5/17

Pathloss Models for V2V
A number of pathloss models have been developed for a variety ofwireless communication systems. A common model for (some) V2Vscenarios is the log-distance power law model:
PL(d) = PL(d0) + 10nlog10
✓d
d0
◆
| {z }Mean pathloss, µ(d)
+ �|{z}Large-scale fading
, d � d0, (1)
I Parameters to be estimated for this model:
1. PL exponent: n
2. Pathloss at the reference distance d0: PL(d0)
3. Large-scale fading about the mean power: � ⇠ N (0,�
2)
IEEE VTS Workshop, Halmstad, 2015-11-11 5/17

Example - Synthetic Pathloss Data
PL(d) = PL(d0) + 10nlog10
✓d
d0
◆
| {z }Mean pathloss, µ(d)
+ �|{z}Large-scale fading
, d � d0, (2)
10
010
110
210
3
40
60
80
100
120
µ̂(d) + 2�
µ̂(d) - 2�
Distance [m]
Pat
hlos
s[d
B]
µ(d)
IEEE VTS Workshop, Halmstad, 2015-11-11 6/17
What happens if there are missing samples?
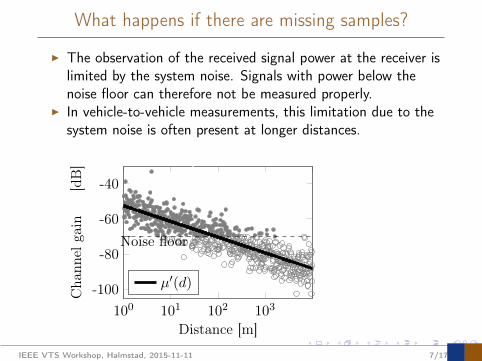
I The observation of the received signal power at the receiver islimited by the system noise. Signals with power below thenoise floor can therefore not be measured properly.
I In vehicle-to-vehicle measurements, this limitation due to thesystem noise is often present at longer distances.
10
010
110
210
3
-40
-60
-80
-100
�PL(d0)
µ
0(dl)
dl
N (µ
0(dl),�
2)
Noise floor
Distance [m]
Cha
nnel
gain
[dB
]
µ
0(d)
IEEE VTS Workshop, Halmstad, 2015-11-11 7/17

What happens if there are missing samples?
I The observation of the received signal power at the receiver islimited by the system noise. Signals with power below thenoise floor can therefore not be measured properly.
I In vehicle-to-vehicle measurements, this limitation due to thesystem noise is often present at longer distances.
10
010
110
210
3
-40
-60
-80
-100
�PL(d0)
dl
µ
0(dl)
N (µ
0(dl),�
2)
Noise floor
Distance [m]
Cha
nnel
gain
[dB
]
µ
0(d)
IEEE VTS Workshop, Halmstad, 2015-11-11 7/17

Censored and Truncated Samples
IY is censored when we observe X for all observations, but weonly know the true value of Y for a restricted range ofobservations.
IY is truncated when we only observe X for observations whereY is within a restricted range, i.e., there is no additionalinformation outside this range.
In pathloss measurements, the samples can be modeled as beingcensored, since we observe X (i.e. d) for all observations [1].[1] C. Gustafson, T. Abbas, D. Bolin and F. Tufvesson, "Statistical Modeling and Estimation
of Censored Pathloss Data" IEEE Wireless Comm. Letters, 2015.
IEEE VTS Workshop, Halmstad, 2015-11-11 8/17
Estimation - Ordinary Least Squares
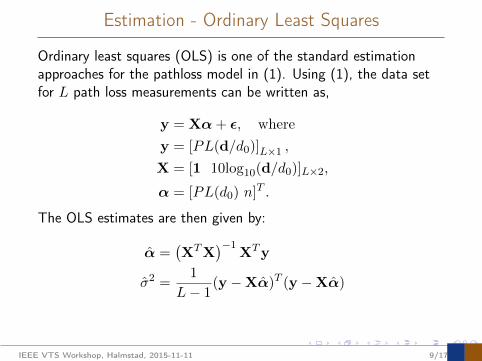
Ordinary least squares (OLS) is one of the standard estimationapproaches for the pathloss model in (1). Using (1), the data setfor L path loss measurements can be written as,
y = X↵+ ✏, where
y = [PL(d/d0)]L⇥1 ,
X = [1 10log10(d/d0)]L⇥2,
↵ = [PL(d0) n]T.
The OLS estimates are then given by:
ˆ↵ =
�X
TX
��1X
Ty
�̂
2=
1
L� 1
(y �X
ˆ↵)
T(y �X
ˆ↵)
I OLS estimation does not consider censored samples!
IEEE VTS Workshop, Halmstad, 2015-11-11 9/17
Estimation - Ordinary Least Squares
Ordinary least squares (OLS) is one of the standard estimationapproaches for the pathloss model in (1). Using (1), the data setfor L path loss measurements can be written as,
y = X↵+ ✏, where
y = [PL(d/d0)]L⇥1 ,
X = [1 10log10(d/d0)]L⇥2,
↵ = [PL(d0) n]T.
The OLS estimates are then given by:
ˆ↵ =
�X
TX
��1X
Ty
�̂
2=
1
L� 1
(y �X
ˆ↵)
T(y �X
ˆ↵)
I OLS estimation does not consider censored samples!IEEE VTS Workshop, Halmstad, 2015-11-11 9/17

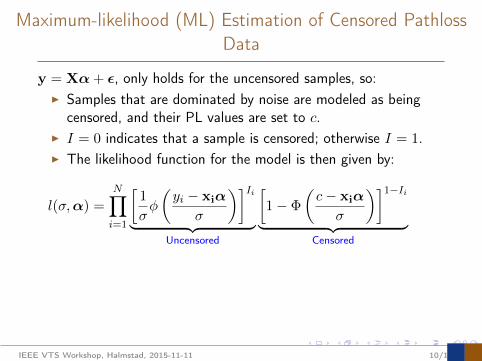
Maximum-likelihood (ML) Estimation of Censored PathlossData
y = X↵+ ✏, only holds for the uncensored samples, so:I Samples that are dominated by noise are modeled as being
censored, and their PL values are set to c.I
I = 0 indicates that a sample is censored; otherwise I = 1.I The likelihood function for the model is then given by:
l(�,↵) =
NY
i=1
1
�
�
✓yi � xi↵
�
◆�Ii
| {z }Uncensored
1� �
✓c� xi↵
�
◆�1�Ii
| {z }Censored
Using the log-likelihood, the parameters � and ↵ are estimatedusing
[�̂,
ˆ↵] = argmin
�,↵{�L(�,↵)}. (3)
IEEE VTS Workshop, Halmstad, 2015-11-11 10/17
Maximum-likelihood (ML) Estimation of Censored PathlossData
y = X↵+ ✏, only holds for the uncensored samples, so:I Samples that are dominated by noise are modeled as being
censored, and their PL values are set to c.I
I = 0 indicates that a sample is censored; otherwise I = 1.I The likelihood function for the model is then given by:
l(�,↵) =
NY
i=1
1
�
�
✓yi � xi↵
�
◆�Ii
| {z }Uncensored
1� �
✓c� xi↵
�
◆�1�Ii
| {z }Censored
Using the log-likelihood, the parameters � and ↵ are estimatedusing
[�̂,
ˆ↵] = argmin
�,↵{�L(�,↵)}. (3)
IEEE VTS Workshop, Halmstad, 2015-11-11 10/17

Maximum-likelihood (ML) Estimation of Censored PathlossData
y = X↵+ ✏, only holds for the uncensored samples, so:I Samples that are dominated by noise are modeled as being
censored, and their PL values are set to c.I
I = 0 indicates that a sample is censored; otherwise I = 1.I The likelihood function for the model is then given by:
l(�,↵) =
NY
i=1
1
�
�
✓yi � xi↵
�
◆�Ii
| {z }Uncensored
1� �
✓c� xi↵
�
◆�1�Ii
| {z }Censored
Using the log-likelihood, the parameters � and ↵ are estimatedusing
[�̂,
ˆ↵] = argmin
�,↵{�L(�,↵)}. (3)
IEEE VTS Workshop, Halmstad, 2015-11-11 10/17

Estimation of Synthetic Censored Data
10
010
110
210
3
40
60
80
100
120
µ̂(d) + 2�
µ̂(d) - 2�
Distance [m]
Pat
hlos
s[d
B]
CensoredUncensoredML: µ̂(d)OLS: µ̂(d)
n̂ �̂
True 2 4ML 2.0 4.0
OLS 1.7 3.5
OLS is biased and inconsistent. It underestimates n and �.IEEE VTS Workshop, Halmstad, 2015-11-11 11/17
Estimation of Measured V2V Data that is Censored
10
110
210
3
60
80
100
120
µ̂(d) + 2�
µ̂(d) - 2�
Distance [m]
Pat
hlos
s[d
B]
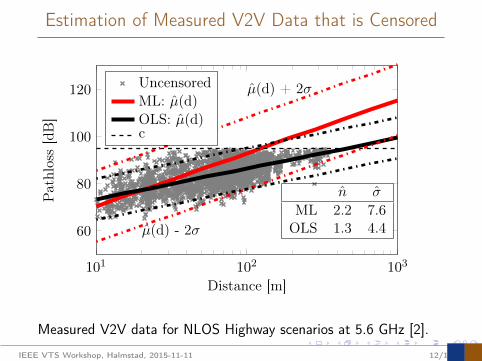
UncensoredML: µ̂(d)OLS: µ̂(d)c
n̂ �̂
ML 2.2 7.6OLS 1.3 4.4
Measured V2V data for NLOS Highway scenarios at 5.6 GHz [2].
IEEE VTS Workshop, Halmstad, 2015-11-11 12/17

ML Framework for other Pathloss Models
I The presented ML method was developed based on thelog-distance power law model.
I It assumes that the LS fading is Gaussian, with zero mean anda variance that is independent of distance.
I However, the proposed ML framework can easily be extendedto include other pathloss models.
I The ML method is unbiased and consistent, given that theunderlying model is correct.
I In many V2V scenarios, such as highway and rural, thepathloss exhibits a clear two-ray behavior.
I For these cases, a proper two-ray pathloss model needs to beused instead.
I Currently, we are working on an estimator based on such amodel.
IEEE VTS Workshop, Halmstad, 2015-11-11 13/17

ML Framework for other Pathloss Models
I The presented ML method was developed based on thelog-distance power law model.
I It assumes that the LS fading is Gaussian, with zero mean anda variance that is independent of distance.
I However, the proposed ML framework can easily be extendedto include other pathloss models.
I The ML method is unbiased and consistent, given that theunderlying model is correct.
I In many V2V scenarios, such as highway and rural, thepathloss exhibits a clear two-ray behavior.
I For these cases, a proper two-ray pathloss model needs to beused instead.
I Currently, we are working on an estimator based on such amodel.
IEEE VTS Workshop, Halmstad, 2015-11-11 13/17
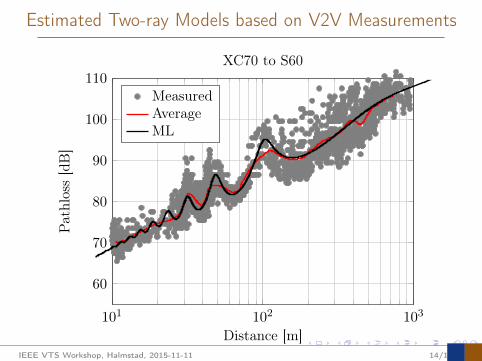
Estimated Two-ray Models based on V2V Measurements
10
110
210
3
60
70
80
90
100
110
Distance [m]
Pat
hlos
s[d
B]
XC70 to S60
MeasuredAverageML
IEEE VTS Workshop, Halmstad, 2015-11-11 14/17

Conclusions and Future Work
I We have shown, that if the effects of the noise floor are nottaken into account, the pathloss estimates will be biased.
I This can be solved by applying a ML estimator that takescensored samples into account.
I The approach can be extended to include other effects andalso works for different types of pathloss models.
I We will finalize the two-ray estimator.I Based on the results, Mikaels results for the convoy
measurements will be updated.
IEEE VTS Workshop, Halmstad, 2015-11-11 15/17

References
[1] C. Gustafson, T. Abbas, D. Bolin and F. Tufvesson, "StatisticalModeling and Estimation of Censored Pathloss Data" IEEE Wireless
Comm. Letters, 2015.[2] T. Abbas, K. Sjöberg, J. Karedal, and F. Tufvesson, "Ameasurement based shadow fading model for vehicle-to-vehiclenetwork simulations," International Journal of Antennas and
Propagation, 2015.[3] M. Nilsson, D. Vlastaras, T. Abbas, B. Bergqvist and F.Tufvesson, "On Multilink Shadowing Effects in Measured V2VChannels on Highway", EuCAP, 2015.[4] C. Gustafson, T. Abbas, D. Bolin, F. Tufvesson, "TobitMaximum-likelihood estimation of Censored Pathloss Data", LundUniversity, 2015.Code is available in [4], athttp://lup.lub.lu.se/luur/download?func=downloadFile&recordOId=7456326&fileOId=7456327
IEEE VTS Workshop, Halmstad, 2015-11-11 16/17

Thank You!
Questions?
IEEE VTS Workshop, Halmstad, 2015-11-11 17/17



![Statistical Modeling and Estimation of Censored Pathloss Data … · pathloss data is acknowledged in [6], however, the authors do not give any detailed information on how to solve](https://static.fdocuments.in/doc/165x107/614a968912c9616cbc698363/statistical-modeling-and-estimation-of-censored-pathloss-data-pathloss-data-is-acknowledged.jpg)














