Particle Gibbs algorithms - Uppsala University · 2016. 2. 23. · of the Roaly Statistical...
40
Transcript of Particle Gibbs algorithms - Uppsala University · 2016. 2. 23. · of the Roaly Statistical...

Particle Gibbs algorithmsmethodology and analysis
Fredrik Lindsten
Linköping University &
The University of Cambridge
November 18, 2015

Outline
1. Background � Particle Gibbs
2. Uniform ergodicityF. Lindsten, R. Douc, and E. Moulines, Uniform ergodicity of the Particle Gibbs sampler.Scandinavian Journal of Statistics, 42(3): 775-797, 2015.
3. Blocking strategies and stabilityS. S. Singh, F. Lindsten, and E. Moulines, Blocking Strategies and Stability of Particle GibbsSamplers. arXiv:1509.08362, 2015.
4. Particle Gibbs with Ancestor SamplingF. Lindsten, M. I. Jordan and T. B. Schön, Particle Gibbs with Ancestor sampling, Journal ofMachine Learning Research, 15: 2145-2184, 2014.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 2 / 27

Inference in state-space models
Consider a nonlinear discrete-time state-space model,
Xt | Xt−1 ∼ mθ(Xt−1, ·),Yt | Xt ∼ gθ(Xt , ·),
and X1 ∼ µ.
We observe Y1:T = (y1, . . . , yT ) and wish to estimate θ and/or X1:T .
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 3 / 27

Gibbs sampler for SSMs
Let
φT ,θ(dx1:T ) = p(x1:T | θ, y1:T )dx1:T ,
denote the joint smoothing distribution.
MCMC: Gibbs sampling for state-space models. Iterate,
Draw θ[k] ∼ p(θ | X1:T [k − 1], y1:T );
OK!
Draw X1:T [k] ∼ φT ,θ[k](·).
Hard!
One-at-a-time: Xt [k] ∼ p(xt | θ[k],Xt−1[k],Xt+1[k − 1], yt)
Particle Gibbs: Approximate φT ,θ(dx1:T ) using a particle �lter.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 4 / 27

Gibbs sampler for SSMs
Let
φT ,θ(dx1:T ) = p(x1:T | θ, y1:T )dx1:T ,
denote the joint smoothing distribution.
MCMC: Gibbs sampling for state-space models. Iterate,
Draw θ[k] ∼ p(θ | X1:T [k − 1], y1:T ); OK!
Draw X1:T [k] ∼ φT ,θ[k](·). Hard!
One-at-a-time: Xt [k] ∼ p(xt | θ[k],Xt−1[k],Xt+1[k − 1], yt)
Particle Gibbs: Approximate φT ,θ(dx1:T ) using a particle �lter.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 4 / 27

Gibbs sampler for SSMs
Let
φT ,θ(dx1:T ) = p(x1:T | θ, y1:T )dx1:T ,
denote the joint smoothing distribution.
MCMC: Gibbs sampling for state-space models. Iterate,
Draw θ[k] ∼ p(θ | X1:T [k − 1], y1:T ); OK!
Draw X1:T [k] ∼ φT ,θ[k](·). Hard!
One-at-a-time: Xt [k] ∼ p(xt | θ[k],Xt−1[k],Xt+1[k − 1], yt)
Particle Gibbs: Approximate φT ,θ(dx1:T ) using a particle �lter.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 4 / 27

The particle �lter
The particle �lter approximates φt,θ(dx1:t), t = 1, . . . , T by
φ̂Nt,θ(dx1:t) :=N∑i=1
ωit∑` ω
`t
δX i1:t(dx1:t).
Resampling: {X i1:t−1, ω
it−1}Ni=1 → {X̃ i
1:t−1, 1/N}Ni=1.
Propagation: X it ∼ qt,θ(X̃
it−1, ·) and X i
1:t = (X̃ i1:t−1,X
it ).
Weighting: ωit = Wt,θ(X̃
it−1,X
it ).
⇒ {X i1:t , ω
it}Ni=1
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 5 / 27
Weighting Resampling Propagation Weighting Resampling

The particle �lter
The particle �lter approximates φt,θ(dx1:t), t = 1, . . . , T by
φ̂Nt,θ(dx1:t) :=N∑i=1
ωit∑` ω
`t
δX i1:t(dx1:t).
Resampling: P(Ait = j | FN
t−1) = ωjt−1/
∑` ω
`t−1.
Propagation: X it ∼ qt,θ(X
Ait
t−1, ·) and X i1:t = (X
Ait
1:t−1,Xit ).
Weighting: ωit = Wt,θ(X
Ait
t−1,Xit ).
⇒ {X i1:t , ω
it}Ni=1
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 5 / 27
Weighting Resampling Propagation Weighting Resampling

MCMC using particle �lters
In MCMC we need a Markov kernel with invariant distribution φT .(From now on we drop θ from the notation.)
Conditional particle �lter (CPF)Let x ′
1:T = (x ′1, . . . , x ′
T) be a �xed reference trajectory.
At each time t, sample only N − 1 particles in the standard way.
Set the Nth particle deterministically: XNt = x
′t and AN
t = N.
C. Andrieu, A. Doucet and R. Holenstein, Particle Markov chain Monte Carlo methods. Journalof the Royal Statistical Society: Series B, 72:269-342, 2010.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 6 / 27

MCMC using particle �lters
In MCMC we need a Markov kernel with invariant distribution φT .(From now on we drop θ from the notation.)
Conditional particle �lter (CPF)Let x ′
1:T = (x ′1, . . . , x ′
T) be a �xed reference trajectory.
At each time t, sample only N − 1 particles in the standard way.
Set the Nth particle deterministically: XNt = x
′t and AN
t = N.
C. Andrieu, A. Doucet and R. Holenstein, Particle Markov chain Monte Carlo methods. Journalof the Royal Statistical Society: Series B, 72:269-342, 2010.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 6 / 27

The PG Markov kernel (I/II)
Consider the procedure:
1. Run CPF(N, x ′1:T ) targeting φT (dx1:T ),
2. Sample X?1:T with P(X?
1:T = X i1:T | FN
T ) ∝ ωiT .
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 7 / 27

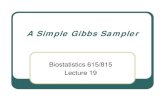
The PG Markov kernel (I/II)
Consider the procedure:
1. Run CPF(N, x ′1:T ) targeting φT (dx1:T ),
2. Sample X?1:T with P(X?
1:T = X i1:T | FN
T ) ∝ ωiT .
5 10 15 20 25 30 35 40 45 50−3
−2
−1
0
1
2
3
Time
Sta
te
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 7 / 27

The PG Markov kernel (II/II)
This procedure:
Maps x ′1:T stochastically into X?
1:T .
Implicitly de�nes a Markov kernel PN on (XT ,XT ) (the PG kernel),
PN(x′1:T ,A) = E[1A(X ?
1:T )]
PN is φT -invariant for any number of particles N ≥ 1.
What about ergodicity?
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 8 / 27

The PG Markov kernel (II/II)
This procedure:
Maps x ′1:T stochastically into X?
1:T .
Implicitly de�nes a Markov kernel PN on (XT ,XT ) (the PG kernel),
PN(x′1:T ,A) = E[1A(X ?
1:T )]
PN is φT -invariant for any number of particles N ≥ 1.
What about ergodicity?
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 8 / 27

Outline
1. Background � Particle Gibbs
2. Uniform ergodicityF. Lindsten, R. Douc, and E. Moulines, Uniform ergodicity of the Particle Gibbs sampler.Scandinavian Journal of Statistics, 42(3): 775-797, 2015.
3. Blocking strategies and stabilityS. S. Singh, F. Lindsten, and E. Moulines, Blocking Strategies and Stability of Particle GibbsSamplers. arXiv:1509.08362, 2015.
4. Particle Gibbs with Ancestor SamplingF. Lindsten, M. I. Jordan and T. B. Schön, Particle Gibbs with Ancestor sampling, Journal ofMachine Learning Research, 15: 2145-2184, 2014.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 9 / 27

Minorisation
Assume ‖Wt‖∞ <∞ and de�ne {Bt,T}Tt=1 by
Bt,T = sup0≤`≤T−t
‖Wt‖∞ supxt p(yt+1:t+` | xt)p(yt:t+` | y1:t−1)
Theorem
The PG kernel is minorised by φT :
PN(x′1:T ,A) ≥ (1− εT ,N)φT (A)
where εT ,N := 1−T∏t=1
N − 1
2Bt,T + N − 2≤ 1
N − 1
T∑t=1
(2Bt,T − 1) +O(N−2).
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 10 / 27

Proof idea
Take A ∈ XT . We can write,
PN(x′1:T ,A) =
N∑k=1
E
[ωkT1A(X
k1:T )∑N
i=1 ωiT
]≥ (N − 1)E
[ω1T1A(X
11:T )∑N
i=1 ωiT
]
≥ (N − 1)E
[E
[ω1T1A(X
11:T )
2‖WT‖∞ +∑N−1
i=2 ωiT
| FNT−1
]]
By convexity of x 7→ 1/x and Jensen's inequality:
PN(x′1:T ,A) ≥ (N − 1)E
[E[ω1T1A(X
11:T ) | FN
T−1]
2‖WT‖∞ + (N − 2)E[ω2T | FN
T−1]]
Compute the inner conditional expectations (w.r.t. X 1T and X 2
T ,respectively). Repeat for t = T − 1, t = T − 2, etc.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 11 / 27

Proof idea
Take A ∈ XT . We can write,
PN(x′1:T ,A) =
N∑k=1
E
[ωkT1A(X
k1:T )∑N
i=1 ωiT
]≥ (N − 1)E
[ω1T1A(X
11:T )∑N
i=1 ωiT
]
≥ (N − 1)E
[E
[ω1T1A(X
11:T )
2‖WT‖∞ +∑N−1
i=2 ωiT
| FNT−1
]]
By convexity of x 7→ 1/x and Jensen's inequality:
PN(x′1:T ,A) ≥ (N − 1)E
[E[ω1T1A(X
11:T ) | FN
T−1]
2‖WT‖∞ + (N − 2)E[ω2T | FN
T−1]]
Compute the inner conditional expectations (w.r.t. X 1T and X 2
T ,respectively). Repeat for t = T − 1, t = T − 2, etc.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 11 / 27

Mixing conditions
Under strong mixing conditions:
1− εT ,N ≥(1− 1
c(N−1)+1
)Tfor c ∈ (0, 1] (depending on mixing).
Stable as T →∞ if N ∼ γT .
Under (weaker) moment conditions:
(1− εT ,N)−1 bounded in probability as T →∞, provided N ∼ T 1/γ
for γ ∈ (0, 1) (depending on mixing).
Generalised to the case with a misspeci�ed model (unknown θ).
Veri�able conditions (also for non-compact state spaces).
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 12 / 27

Mixing conditions
Under strong mixing conditions:
1− εT ,N ≥(1− 1
c(N−1)+1
)Tfor c ∈ (0, 1] (depending on mixing).
Stable as T →∞ if N ∼ γT .
Under (weaker) moment conditions:
(1− εT ,N)−1 bounded in probability as T →∞, provided N ∼ T 1/γ
for γ ∈ (0, 1) (depending on mixing).
Generalised to the case with a misspeci�ed model (unknown θ).
Veri�able conditions (also for non-compact state spaces).
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 12 / 27

Gibbs sampling for state space models
Alternative Gibbs sampling strategies:
Particle Gibbs: X ?1:T ∼ PN(x1:T , ·).
Samples X1:T in one �block�.
Requires N ∝ T as T →∞ for stability (strong mixing)
⇒ O(T 2) computational cost!
One-at-a-time: X ?t ∼ p(xt | x−t , yt), t = 1, . . . , T .
Slow mixing/convergence speed!
Stable as T →∞?
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 13 / 27

Outline
1. Background � Particle Gibbs
2. Uniform ergodicityF. Lindsten, R. Douc, and E. Moulines, Uniform ergodicity of the Particle Gibbs sampler.Scandinavian Journal of Statistics, 42(3): 775-797, 2015.
3. Blocking strategies and stabilityS. S. Singh, F. Lindsten, and E. Moulines, Blocking Strategies and Stability of Particle GibbsSamplers. arXiv:1509.08362, 2015.
4. Particle Gibbs with Ancestor SamplingF. Lindsten, M. I. Jordan and T. B. Schön, Particle Gibbs with Ancestor sampling, Journal ofMachine Learning Research, 15: 2145-2184, 2014.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 14 / 27

Blocking strategy
J1 J3 J5
J2 J4
1 · · · · · · T
Intermediate strategy � blocked Particle Gibbs:
PJN(xJ+ , dx
?J ) PG kernel for p(xJ | x∂J , yJ).
Trade o�:
(1) Mixing of ideal blocked Gibbs sampler ↗ as |J| ↗ (how fast? stable?)
(2) �Mixing of PJN � =
(1− 1
c(N−1)+1
)|J|, i.e., ↘ as |J| ↗
∂J = {t ∈ Jc : t + 1 ∈ J or t − 1 ∈ J} (�boundary points for block J�)J+ = J ∪ ∂J
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 15 / 27

Stability of blocked Gibbs sampler
Theorem
Let J = {J1, . . . , Jm} be a cover of {1, . . . , T} and let P = PJ1 · · ·PJm
be the Gibbs kernel for one complete sweep. Let all blocks have common
size L and common overlap p. Then
|µPk(f )− φT (f )| ≤ 2λk−1T∑i=1
osci (f ),
where λ = αp+1 + αL−p and α ∈ [0, 1) is a constant depending on the
mixing coe�cients of the model (assuming strong mixing).
To control the rate λ we need to increase both L and p! With . 50%overlapping blocks we get λ < 1 if L > log 4
logα−1 − 1.
For left-to-right and parallel blocking the rate is ∼ λ2.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 16 / 27

Stability of blocked Particle Gibbs sampler
The blocked Particle Gibbs sampler PN can be seen as a perturbation ofthe ideal sampler.
Theorem
|µPkN(f )− φT (f )| ≤ 2λk−1N
∑Ti=1 osci (f )
λN = λ+ const.× εL,N , εL,N ≤ 1−(1− 1
c(N − 1) + 1
)L
.
λ→ 0 with increasing block size L and overlap p.
εL,N ↘ as N ↗; εL,N ↗ as L↗.
‖µPkN(f )− φT (f )‖TV ≤ 2Tλk−1N .
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 17 / 27

Outline
1. Background � Particle Gibbs
2. Uniform ergodicityF. Lindsten, R. Douc, and E. Moulines, Uniform ergodicity of the Particle Gibbs sampler.Scandinavian Journal of Statistics, 42(3): 775-797, 2015.
3. Blocking strategies and stabilityS. S. Singh, F. Lindsten, and E. Moulines, Blocking Strategies and Stability of Particle GibbsSamplers. arXiv:1509.08362, 2015.
4. Particle Gibbs with Ancestor SamplingF. Lindsten, M. I. Jordan and T. B. Schön, Particle Gibbs with Ancestor sampling, Journal ofMachine Learning Research, 15: 2145-2184, 2014.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 18 / 27

The PGAS Markov kernel (I/II)
Standard Particle Gibbs:
At time t: set XNt = x ′t and AN
t = N.
Particle Gibbs with �Ancestor Sampling� (PGAS):
At time t: set XNt = x ′t and sample
P(ANt = j | FN
t−1) =ωjt−1m(X j
t−1, x′t)∑
l ωlt−1m(X l
t−1, x′t).
Similar to the backward sampling method proposed by Whiteley,
Whiteley, N., Discussion on Particle Markov chain Monte Carlo methods. Journal of the RoyalStatistical Society: Series B, 72:306-207, 2010.
but accomplishes the same result using a forward-only implementation.
More appropriate for models with non-Markovian dynamics.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 19 / 27

The PGAS Markov kernel (II/II)
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 20 / 27

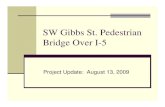
The PGAS Markov kernel (II/II)
5 10 15 20 25 30 35 40 45 50−3
−2
−1
0
1
2
3
Time
Sta
te
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 20 / 27

PGAS vs. PG
5 10 15 20 25 30 35 40 45 50−3
−2
−1
0
1
2
3
Time
Sta
te
5 10 15 20 25 30 35 40 45 50−3
−2
−1
0
1
2
3
Time
Sta
te
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 21 / 27
PGAS PG

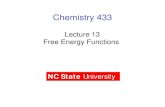
PGAS vs. PG
PGAS
0 50 100 150 200 250 300 350 4000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (t)
Updatefreq
uen
ceyof
xt
N = 5N = 20N = 100N = 1000
PG
0 50 100 150 200 250 300 350 4000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (t)
Updatefreq
uen
ceyof
xt
N = 5N = 20N = 100N = 1000
Plots of the update rate of Xt versus t, i.e. the proportion of iterations where Xt
changes value. (Simulated data from a simple stochastic volatility model.)
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 22 / 27

PGAS and blocking
Coloured regions illustrate the intervals between coalescence points.
PGAS ⇔ stochastic and adaptive blocking?
If yes, then ∃N0 such that PGAS is stable as T →∞ for N ≥ N0?
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 23 / 27

Summary
Particle Gibbs � mimics sampling from φT ,θ(dx1:T ) in a Gibbs sampler.
Uniformly ergodic under weak conditions.
• Strong mixing conditions: stable if N = γT .• (Weaker) Moment conditions: stable if N = T 1/γ .
Blocking ⇒ stable implementation for constant N.
• Find block size L and overlap p to obtain a stable ideal sampler.• Select N large enough to obtain a stable Particle Gibbs sampler.• Opens up for parallelisation!• Requires evaluation of m(xt−1, xt)!
Ancestor sampling ⇒ much improved empirical performance
• Can AS be viewed as adaptive and stochastic blocking?• Stable as T →∞ for �xed N?• Requires evaluation of m(xt−1, xt)!
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 24 / 27

Summary
Particle Gibbs � mimics sampling from φT ,θ(dx1:T ) in a Gibbs sampler.
Uniformly ergodic under weak conditions.
• Strong mixing conditions: stable if N = γT .• (Weaker) Moment conditions: stable if N = T 1/γ .
Blocking ⇒ stable implementation for constant N.
• Find block size L and overlap p to obtain a stable ideal sampler.• Select N large enough to obtain a stable Particle Gibbs sampler.• Opens up for parallelisation!• Requires evaluation of m(xt−1, xt)!
Ancestor sampling ⇒ much improved empirical performance
• Can AS be viewed as adaptive and stochastic blocking?• Stable as T →∞ for �xed N?• Requires evaluation of m(xt−1, xt)!
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 24 / 27

Summary
Particle Gibbs � mimics sampling from φT ,θ(dx1:T ) in a Gibbs sampler.
Uniformly ergodic under weak conditions.
• Strong mixing conditions: stable if N = γT .• (Weaker) Moment conditions: stable if N = T 1/γ .
Blocking ⇒ stable implementation for constant N.
• Find block size L and overlap p to obtain a stable ideal sampler.• Select N large enough to obtain a stable Particle Gibbs sampler.• Opens up for parallelisation!• Requires evaluation of m(xt−1, xt)!
Ancestor sampling ⇒ much improved empirical performance
• Can AS be viewed as adaptive and stochastic blocking?• Stable as T →∞ for �xed N?• Requires evaluation of m(xt−1, xt)!
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 24 / 27

Summary
Particle Gibbs � mimics sampling from φT ,θ(dx1:T ) in a Gibbs sampler.
Uniformly ergodic under weak conditions.
• Strong mixing conditions: stable if N = γT .• (Weaker) Moment conditions: stable if N = T 1/γ .
Blocking ⇒ stable implementation for constant N.
• Find block size L and overlap p to obtain a stable ideal sampler.• Select N large enough to obtain a stable Particle Gibbs sampler.• Opens up for parallelisation!• Requires evaluation of m(xt−1, xt)!
Ancestor sampling ⇒ much improved empirical performance
• Can AS be viewed as adaptive and stochastic blocking?• Stable as T →∞ for �xed N?• Requires evaluation of m(xt−1, xt)!
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 24 / 27

Wasserstein estimates
Def: For f : XT 7→ R, the oscillation in the i-th coordinate is
osci (f ) = supx ,z∈XT
x−i=z−i
|f (x)− f (z)|
Def: W is a Wasserstein matrix for Markov kernel P if
osci (Pf ) ≤T∑j=1
Wijoscj(f ).
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 25 / 27

Wasserstein matrix for blocked Gibbs sampler
Under strong mixing
W J =
1
...
1
α 0 · · · 0 α|J|
α2 0 · · · 0 α|J|−1
.
.
.
.
.
....
.
.
.
.
.
.
α|J| 0 · · · 0 α1
...
1
,
is a Wasserstein Matrix for the ideal Gibbs kernel updating block J,
PJ(x1:T , dx?1:T ) :
{X ?J ∼ p(xJ | x∂J , yJ)dxJ ,
X ?Jc = xJc
where α ∈ [0, 1) is a constant depending on the mixing coe�cients.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 26 / 27

Stability of blocked Gibbs sampler
Theorem
Let J = {J1, . . . , Jm} be a cover of {1, . . . , T} and let P = PJ1 · · ·PJm
be the Gibbs kernel for one complete sweep. Let ∂ =⋃
J∈J ∂J. Then, if
supi∈J∩∂
T∑j=1
W Jij ≤ λ < 1 ∀J ∈ J , (?)
it follows that |µPk(f )− φT (f )| ≤ 2λk−1T∑i=1
osci (f ).
With . 50% overlapping equally sized blocks, (?) is satis�ed if theblock size satis�es |J| > log 4
logα−1 − 1.
For left-to-right and parallel blocking the rate is ∼ λ2.
Fredrik Lindsten (LiU & Cambridge) Particle Gibbs algorithms November 18, 2015 27 / 27







![Epigenetics & Genetic Algorithms for Inverse Kinematicsvirtualpuppetry.com/epigenetic/paper.pdf · on an optimal solution. The concept of epigenetics with elitism [Gibbs 2003], variable](https://static.fdocuments.in/doc/165x107/60a831451befda0626292f6e/epigenetics-genetic-algorithms-for-inverse-kinem-on-an-optimal-solution-the.jpg)





![GIBBS ENSEMBLE TECHNIQUES - Princeton Universitykea.princeton.edu/papers/varenna94/varenna.pdf"Gibbs ensemble" method [1 ]. While the Gibbs ensemble does not necessarily provide data](https://static.fdocuments.in/doc/165x107/5f8996009d366f3056027335/gibbs-ensemble-techniques-princeton-gibbs-ensemble-method-1-while.jpg)
![Gibbs vs. Non-Gibbs in the Equilibrium Ensemble Approach ... · Gibbs vs. non-Gibbs in the equilibrium ensemble approach 527 was recently made [16,17], namely that joint distributions](https://static.fdocuments.in/doc/165x107/5e91661545a3762eae5be596/gibbs-vs-non-gibbs-in-the-equilibrium-ensemble-approach-gibbs-vs-non-gibbs.jpg)