Part I Word - report-1.docx Author Chao Liu Created Date 4/12/2013 7:26:42 PM ...
5
Part I Algorithm Figure 1. The illustration for an electrical field In Fig.1, a planar electromagnetic wave is linearly polarized. The transverse electrical field wave is accompanied by a magnetic field wave, as illustrated in Figure 1. Figure 2. Pixel intensity as a function of the angle of the polarizer before the camera. In Fig.2, Y is pixel value captured by polarizer-attached camera. is the angle of the polarizer before the camera. A is the amplitude of the sinusoid curve; B is initial phase; C is mean value of curve. They are related as: = 2 + + (1) After expanding the sinusoid function, we have: Y = a sin(2) + b sin(2) + C (2) where a = A cos(B) , b=A sin(B) (3) Hence, we have: A= ! + ! , B=a tan ! ! (4) Hence, for all pixels we have: y ! y ! y ! ⋮ y ! = sin2θ ! cos2θ ! 1 ⋮ ⋱ ⋮ sin2θ ! cos2θ ! 1 a b c (5) In this project, we take images of samples for ranging from 0 to 180 degrees with an increment of 10 degrees, so n=19. A metric of how reflected light is partially polarized is given by the expression: Ratio = Partial polarization = ! !"# !! !"# ! !"# !! !"# (6)
Transcript of Part I Word - report-1.docx Author Chao Liu Created Date 4/12/2013 7:26:42 PM ...

Part I
Algorithm
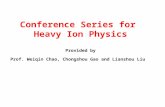
Figure 1. The illustration for an electrical field
In Fig.1, a planar electromagnetic wave is linearly polarized. The transverse electrical field wave is accompanied by a magnetic field wave, as illustrated in Figure 1.
Figure 2. Pixel intensity as a function of the angle of the polarizer before the camera.
In Fig.2, Y is pixel value captured by polarizer-attached camera. 𝜃 is the angle of the polarizer before the camera. A is the amplitude of the sinusoid curve; B is initial phase; C is mean value of curve. They are related as:
𝑌 = 𝐴 𝑠𝑖𝑛 2𝜃 + 𝐵 + 𝐶 (1) After expanding the sinusoid function, we have:
Y = a sin(2𝜃) + b sin(2𝜃) + C (2) where
a = A cos(B) , b=A sin(B) (3) Hence, we have:
A= 𝑎! + 𝑏!, B=a tan!! (4)
Hence, for all pixels we have: y!y!y!⋮y!
=sin2θ! cos2θ! 1⋮ ⋱ ⋮
sin2θ! cos2θ! 1
abc
(5)
In this project, we take images of samples for 𝜃 ranging from 0 to 180 degrees with an increment of 10 degrees, so n=19. A metric of how reflected light is partially polarized is given by the expression:
Ratio = Partial polarization = !!"#!!!"#!!"#!!!"#
(6)

where I!"# = A, I!"# = C. As indicated in [1], this ratio can be used to distinguish between dielectric and non-‐dielectric materials. In our experiment, we use this ratio as the feature to distinguish between aluminum (dielectric material) and plastic (non-‐dielectric material).
Part II Experiment Setup 1.Instruments: Test samples; Pointgray CCD camera; rotatable polarizer; directional light source with polarizer.
Figure. 3 Figure.4
Fig.3 shows the illustration of our experiment setup. The polarized directional light is reflected by the sample before passing through the rotatable polarizer B. The Pointgray CCD camera captures the HDR images. The degree by which the polarizer rotates ranges from 0 to 180, with an increment of 10 degrees. Fig.4 is the picture show the experiment setup. 2. Training set For obtaining appropriate threshold, we took images of samples from Aluminum and Plastic plates. The training set includes: Aluminum: AL2024_1, AL2024_2, AL2024_3, AL2024_4; Plastic: PL0001, PL1043, PL1027, PL2017. For each sample, we take 19 images, each one the images correspond to one 𝜃 value.
Figure.5 The samples in the training set.

After getting intensity values, we estimate the A map, B map, C map and the ratio map using Eq. (1) ~ Eq. (6) The ratio histogram for the training samples in three-‐color channels is shown in Fig.6 (Red is Aluminum, Green is plastics). Then we manually choose the thresholds for three-‐color channels.
Figure.6 Histograms of the Polarization Fresnel’s Ratio for aluminum and plastic in three color channels.
For red channel, we choose threshold to be 3.821. For red channel, we choose threshold to be 4.383. For red channel, we choose threshold to be 3.67.
Part III Experiment I: aluminum scraps vs. plastic surfaces
Test sample: Red/Gray Aluminum & Red/Gray Plastic We have tested with thresholds of R, G and B channels and found that red channel has better performance. This is because test samples are red. We also test with different number of images, i.e. different number of polarizer directions. The results are shown in Fig.7. As shown, the method achieves relative high accuracy even with four images.
Figure.7 (a)~(b). Capture images of samples with/without polarizer before the camera. (c) Ground truth classification map.
(d)~(i) classification map with 3, 4, 5, 6, 12,19 selected polarizer angles with accuracy below each image. The classification
maps are estimated in the R channel.

Figure.8 Classification accuracies vs. # of polarizer directions. (a) The overall classification accuracy. (b) The classification
accuracies for two classes. Green: plastic; red: aluminum.
The accuracies for different # of polarizer directions are shown in Figure.8. Experiment II. Cylindrical aluminum vs. cylindrical plastic
To estimate the effects of the surface normal variation, we test with two cylindrical samples shown
in Figure 9.
Figure 9. (a) Cylindrical samples of aluminum and plastic. (b) Ground truth classification
The A, B, C and the ratio maps for the cylinder samples are shown in Fig.10. For the ratio map,
the image range is clamped so that the maximal value is 10.
Figure.10 A,B,C and the ratio maps.

Figure 11. (a) Ground truth (b) Classification with trained threshold; (c). Segmentation using k-‐means algorithm. (d).
Classification with optimal threshold that is selected manually from Fig. 10 (d)
We observe that the surface normal affects performance a lot. However, as indicated by Fig.11(d), even with large surface normal variation, we can still select a threshold to distinguish between two classes of materials. Fig.11 (c) demonstrates that even with large surface normal variation, we can get a fairly accurate results by using a threshold manually selected based on Fig.11(d) Reference: [1] L. B. Wolff, “Polarization-‐based material classification from specular reflection,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 12, no. 11, pp. 1059–1071, 1990.