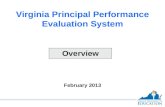
OverviewOverview Motion correction Smoothing kernel Spatial normalisation Standard template fMRI...
28
Overview Overview Motion correction Smoothing kernel Spatial normalisation Standard template MRI time-series Statistical Parametric Map General Linear Model Design matrix Parameter Estimates
-
Upload
karina-tebbetts -
Category
Documents
-
view
217 -
download
1
Transcript of OverviewOverview Motion correction Smoothing kernel Spatial normalisation Standard template fMRI...

OverviewOverviewOverviewOverview
Motioncorrection
Smoothing
kernel
Spatialnormalisation
Standardtemplate
fMRI time-series Statistical Parametric Map
General Linear Model
Design matrix
Parameter Estimates

The preprocessing sequence revistedThe preprocessing sequence revisted
RealignmentRealignment– Motion correction: Adjust for movement between Motion correction: Adjust for movement between
slicesslices
CoregistrationCoregistration– Overlay structural and functional images: Link Overlay structural and functional images: Link
functional scans to anatomical scanfunctional scans to anatomical scan
NormalisationNormalisation– Warp images to fit to a standard template brainWarp images to fit to a standard template brain
SmoothingSmoothing– To increase signal-to-noise ratioTo increase signal-to-noise ratio
Extras (optional)Extras (optional)– Slice timing correction; unwarpingSlice timing correction; unwarping

Co-registrationCo-registration
Term co-registration applies to any Term co-registration applies to any method for aligning imagesmethod for aligning images– By this token, motion correction is also co-By this token, motion correction is also co-
registrationregistration
However, term is usually used to refer to However, term is usually used to refer to alignment of images from different alignment of images from different modalities. E.g.:modalities. E.g.:– Low resolution T2* fMRI scan (EPI image) to Low resolution T2* fMRI scan (EPI image) to
high resolution, T1, structural image from the high resolution, T1, structural image from the same individualsame individual

Co-registration: Principles behind Co-registration: Principles behind this step of processingthis step of processing
When several images of the same When several images of the same participants have been acquired, it is participants have been acquired, it is useful to have them all in registeruseful to have them all in register
Image registration involves estimating a Image registration involves estimating a set of parameters describing a spatial set of parameters describing a spatial transformation that ‘best ‘ matches the transformation that ‘best ‘ matches the images togetherimages together

fMRI to structuralfMRI to structural
Matching the functional image Matching the functional image to the structural imageto the structural image– Overlaying activation on Overlaying activation on
individual anatomyindividual anatomy– Better spatial image for Better spatial image for
normalisationnormalisation
Two significant differences Two significant differences between co-registering to between co-registering to structural scans and motion structural scans and motion correctioncorrection– When co-registering to When co-registering to
structural, the images do not structural, the images do not have the same signal intensity have the same signal intensity in the same areas; they in the same areas; they cannot be subtractedcannot be subtracted
– They may not be the same They may not be the same shapeshape

Problem: Images are differentProblem: Images are different
Differences in signal intensity between the Differences in signal intensity between the imagesimages
Normalise to appropriate template (EPI to EPI; T1 to T1), then segmentNormalise to appropriate template (EPI to EPI; T1 to T1), then segment

SegmentationSegmentation
Use the gray/white estimates from the Use the gray/white estimates from the normalisation step as starting estimates of the normalisation step as starting estimates of the probability of each voxel being grey or white probability of each voxel being grey or white mattermatterEstimate the mean and variance of the Estimate the mean and variance of the gray/white matter signal intensitiesgray/white matter signal intensitiesReassign probabilities for voxels on basis ofReassign probabilities for voxels on basis of– Probability map from templateProbability map from template– Signal intensity and distributions of intensity for Signal intensity and distributions of intensity for
gray/white mattergray/white matter
Iterate until there is a good fitIterate until there is a good fit


Register segmented imagesRegister segmented images
Grey/white/CSF probability images for EPI Grey/white/CSF probability images for EPI (T2*) and T1(T2*) and T1
Combined least squares match Combined least squares match (simultaneously) of gray/white/CSF (simultaneously) of gray/white/CSF images of EPI (T2*) + T1 segmented images of EPI (T2*) + T1 segmented imagesimages

An alternative technique that relies An alternative technique that relies on mutual information theoryon mutual information theory
Different material will have different Different material will have different intensities within a scan modalityintensities within a scan modality
– E.g. air will have a consistent brightness, and E.g. air will have a consistent brightness, and this will differ from other materials (such as this will differ from other materials (such as white matter)white matter)

From Bianca de Haan’s fmri guide. http://www.sph.sc.edu/comd/rorden/fmri_guide/

SPM co-registration - problemsSPM co-registration - problems
Poor affine normalisation Poor affine normalisation bad bad segmentation etc.segmentation etc.
Image not homogeneous Image not homogeneous errors in errors in clusteringclustering
Susceptibility holes in image (e.g. sinuses) Susceptibility holes in image (e.g. sinuses) errors in clustering/segmentation errors in clustering/segmentation

The EPI scans can also be The EPI scans can also be registered to subject’s own mean registered to subject’s own mean
EPI imageEPI image
Two images from the same subject acquired Two images from the same subject acquired using the same modality generally look similarusing the same modality generally look similar
Hence, it is sufficient to find the rigid-body Hence, it is sufficient to find the rigid-body transformation parameters that minimise the transformation parameters that minimise the sum of squared differences between themsum of squared differences between them
Easier than co-registration between modalities Easier than co-registration between modalities (intensity correspondence)(intensity correspondence)– Can be spatially less preciseCan be spatially less precise– But more sensitive to detecting activity differences?But more sensitive to detecting activity differences?

The preprocessing sequence revistedThe preprocessing sequence revisted
RealignmentRealignment– Motion correction: Adjust for movement between Motion correction: Adjust for movement between
slicesslices
CoregistrationCoregistration– Overlay structural and functional images: Link Overlay structural and functional images: Link
functional scans to anatomical scanfunctional scans to anatomical scan
NormalisationNormalisation– Warp images to fit to a standard template brainWarp images to fit to a standard template brain
SmoothingSmoothing– To increase signal-to-noise ratioTo increase signal-to-noise ratio
Extras (optional)Extras (optional)– Slice timing correction; unwarpingSlice timing correction; unwarping

NormalisationNormalisation
This enables:This enables:– Signal averaging across Signal averaging across
participants:participants:• Derive group statistics -> generalise Derive group statistics -> generalise
findings to populationfindings to population• Identify commonalities and differences Identify commonalities and differences
between groups (e.g., patient vs. between groups (e.g., patient vs. healthy)healthy)
– Report results in standard co-Report results in standard co-ordinate system (e.g. Talairach and ordinate system (e.g. Talairach and Tournoux stereotactic space)Tournoux stereotactic space)
Goal:Goal: Register images from different participants Register images from different participants into roughly the same co-ordinate system (where the into roughly the same co-ordinate system (where the co-ordinate system is defined by a template image)co-ordinate system is defined by a template image)

Matthew Brett

Normalisation: MethodsNormalisation: Methods
Methods of registering images:Methods of registering images:– Label-basedLabel-based approaches: Label homologous features in source approaches: Label homologous features in source
and reference images (points, lines, surfaces) and then warp and reference images (points, lines, surfaces) and then warp (spatially transform) the images to align the landmarks (BUT: (spatially transform) the images to align the landmarks (BUT: often features identified manually [time consuming and often features identified manually [time consuming and subjective!] and few identifiable landmarks) subjective!] and few identifiable landmarks)
– Intensity-basedIntensity-based approaches: Identify a spatial transformation approaches: Identify a spatial transformation that maximises some voxel-wise similarity measure (usually by that maximises some voxel-wise similarity measure (usually by minimising the sum of squared differences between images; minimising the sum of squared differences between images; BUT: assumes correspondence in image intensity [i.e., within-BUT: assumes correspondence in image intensity [i.e., within-modality consistency], and susceptible to poor starting modality consistency], and susceptible to poor starting estimates)estimates)
– Hybrid approaches – combine intensity method with user-Hybrid approaches – combine intensity method with user-defined featuresdefined features

SPM: Spatial NormalisationSPM: Spatial Normalisation
SPM adopts a two-stage procedure to determine SPM adopts a two-stage procedure to determine a transformation that minimises the sum of a transformation that minimises the sum of squared differences between images:squared differences between images:
Step 1:Step 1: Linear transformation (12-parameter affine) Linear transformation (12-parameter affine)Step 2:Step 2: Non-linear transformation (warping) Non-linear transformation (warping)
High-dimensionality problemHigh-dimensionality problemThe affine and warping transformations are The affine and warping transformations are constrained within an empirical Bayesian constrained within an empirical Bayesian framework (i.e., using prior knowledge of the framework (i.e., using prior knowledge of the variability of head shape and size): “variability of head shape and size): “maximum a maximum a posteriori” posteriori” (MAP)(MAP) estimates of the registration estimates of the registration parametersparameters

Step 1: Affine TransformationStep 1: Affine Transformation
Determines the Determines the optimum 12-parameter optimum 12-parameter affine transformation to affine transformation to match the match the sizesize and and positionposition of the images of the images12 parameters = 3 12 parameters = 3 translations and 3 translations and 3 rotations (rigid-body) + rotations (rigid-body) + 3 shears and 3 zooms3 shears and 3 zooms
Rotation Shear
Translation Zoom

Step 2: Non-linear RegistrationStep 2: Non-linear Registration
Assumes prior approximate Assumes prior approximate registration with 12-parameter registration with 12-parameter affine stepaffine step
Modelled by linear Modelled by linear combinations of smooth combinations of smooth discrete cosine basis functions discrete cosine basis functions (3D)(3D)
Choice of basis functions Choice of basis functions depend on distribution of warps depend on distribution of warps likely to be requiredlikely to be required
For speed and simplicity, uses For speed and simplicity, uses a “small” number of a “small” number of parameters (~1000)parameters (~1000)

Matthew Brett

2-D visualisation 2-D visualisation (horizontal and vertical (horizontal and vertical deformations):deformations):
BrainBrain visualisation:visualisation:
Ashburner; HBF Chap 3
Source
Deformation field
Warped image
Template

Bayesian FrameworkBayesian Framework• Using Bayes rule, we can constrain (“regularise”) the nonlinear fit by
incorporating prior knowledge of the likely extent of deformations:
p(p|e) p(e|p) p(p) (Bayes Rule)
p(p|e) is the a posteriori probability of parameters p given errors ep(e|p) is the likelihood of observing errors e given parameters p p(p) is the a priori probability of parameters p
• For maximum a posteriori (MAP) estimate, we minimise (taking logs):
H(p|e) H(e|p) + H(p) (Gibbs potential)
H(e|p) (-log p(e|p)) is the squared difference between the images (error)H(p) -log p(p)) constrains parameters (penalises unlikely deformations) is “regularisation” hyperparameter, weighting effect of “priors”
Rik Henson

Algorithm Algorithm simultaneouslysimultaneously minimisesminimises::
– Sum of squared difference between Sum of squared difference between template and source image (update template and source image (update weighting for each base)weighting for each base)
– Squared distance between the Squared distance between the parameters and prior expectation parameters and prior expectation (i.e., deviation of the transform from (i.e., deviation of the transform from its expected value)its expected value)
Bayesian constraints applied to both:Bayesian constraints applied to both:
1) affine transformations1) affine transformations
– based on empirical prior rangesbased on empirical prior ranges
2) nonlinear deformations2) nonlinear deformations
– based on smoothness constraint based on smoothness constraint (minimising (minimising membrane energymembrane energy))
Empirically generated priors
Bayesian ConstraintsBayesian ConstraintsBayesian ConstraintsBayesian Constraints
Rik Henson

Affine Registration(2 = 472.1)
Affine Registration(2 = 472.1)
Templateimage
Templateimage
Non-linearregistration
withoutregularisation(2 = 287.3)
Non-linearregistration
withoutregularisation(2 = 287.3)
Non-linearregistration
withregularisation(2 = 302.7)
Non-linearregistration
withregularisation(2 = 302.7)
Without the Bayesian formulation, the non-linear spatial normalisation can introduce unnecessary warping into the spatially normalised images
Bayesian ConstraintsBayesian ConstraintsBayesian ConstraintsBayesian Constraints

Normalisation: CaveatsNormalisation: CaveatsConstrained to correct for only gross differences; residual variability is Constrained to correct for only gross differences; residual variability is accommodated by subsequent spatial accommodated by subsequent spatial smoothingsmoothing before analysis before analysisStructural alignment doesn’t imply functional alignmentStructural alignment doesn’t imply functional alignment– Differences in gyral anatomy and physiology between participants Differences in gyral anatomy and physiology between participants
leads to non-perfect fit. Strict mapping to template may create non-leads to non-perfect fit. Strict mapping to template may create non-existent featuresexistent features
– Brain pathology may disrupt the normalisation procedure because Brain pathology may disrupt the normalisation procedure because matching susceptible to deviations from template image (-> can use matching susceptible to deviations from template image (-> can use brain masks for lesions, etc.; weight different regions differently so they brain masks for lesions, etc.; weight different regions differently so they have varied influence on the final solution)have varied influence on the final solution)
Affine transforms not sufficient: Non-linear solutions are requiredAffine transforms not sufficient: Non-linear solutions are required– Optimally, move each voxel around until it fits. Millions of dimensions.Optimally, move each voxel around until it fits. Millions of dimensions.– Trade off dimensionality against performance (potentially enormous Trade off dimensionality against performance (potentially enormous
number of parameters needed to describe the non-linear number of parameters needed to describe the non-linear transformations that warp two images together; but much of the spatial transformations that warp two images together; but much of the spatial variability can be captured with just a few parameters)variability can be captured with just a few parameters)
Regularization: use prior information (Bayesian scheme) about what fit is Regularization: use prior information (Bayesian scheme) about what fit is most likely (unlike rigid-body transformations where constraints are most likely (unlike rigid-body transformations where constraints are explicit, when using many parameters, regularization is necessary to explicit, when using many parameters, regularization is necessary to ensure voxels remain close to their neighbours)ensure voxels remain close to their neighbours)

Normalisation: SolutionsNormalisation: Solutions
Inspect images for distortions before Inspect images for distortions before transformingtransforming
Adjust image position before normalisation Adjust image position before normalisation to reduce risk of local minima (i.e., best to reduce risk of local minima (i.e., best starting estimate)starting estimate)
Intensity differences: Consider matching to Intensity differences: Consider matching to a local templatea local template
Image abnormalities: Cost-function maskingImage abnormalities: Cost-function masking

Sources:Sources:
Ashburner and Friston’s “Spatial Ashburner and Friston’s “Spatial Normalization Using Basis Functions” Normalization Using Basis Functions” (Chapter 3, Human Brain Function, 2(Chapter 3, Human Brain Function, 2ndnd ed.; ed.; http://www.fil.ion.ucl.ac.uk/spm/doc/books/hbf2/http://www.fil.ion.ucl.ac.uk/spm/doc/books/hbf2/))
Rik Henson’s Preprocessing Slides:Rik Henson’s Preprocessing Slides:– http://www.mrc-cbu.cam.ac.uk/Imaging/Common/rikSPM-preprohttp://www.mrc-cbu.cam.ac.uk/Imaging/Common/rikSPM-prepro
c.pptc.ppt
Matthew Brett’s Spatial Processing Slides:Matthew Brett’s Spatial Processing Slides:– httphttp
://www.mrc-cbu.cam.ac.uk/Imaging/Common/Orsay/jb_spatial.p://www.mrc-cbu.cam.ac.uk/Imaging/Common/Orsay/jb_spatial.pdfdf