
Overview of Cognitive Radio Basics and Spectrum · PDF file Overview of Cognitive Radio Basics...
41
www.cs.helsinki.fi Overview of Cognitive Radio Basics and Spectrum Sensing CN-S2013 Faculty of Science Department of Computer Science 1 Jan.29, 2013 Suzan Bayhan
Transcript of Overview of Cognitive Radio Basics and Spectrum · PDF file Overview of Cognitive Radio Basics...

www.cs.helsinki.fi
Overview of Cognitive Radio Basics and
Spectrum Sensing
CN-S2013
Faculty of Science Department of Computer Science 1
Jan.29, 2013 Suzan Bayhan

CN-S2013
§ Cognitive radio: What, why, and how § Spectrum Sensing: Basics and challenges
Summary of Today’s Class
2 Faculty of Science Department of Computer Science

CN-S2013
u Joseph Mitola III and Gerald Q. Maguire, Jr. (KTH, Sweden), Aug.1999 IEEE Personal Communications, Cognitive Radio: Making Software Radios More Personal u Simon Haykin, Feb. 2005, IEEE Journal on Selected Areas in Communications, Cognitive Radio: Brain-Empowered Wireless Communications “an intelligent wireless communication system that is aware of its environment and uses the methodology of understanding-by-building to learn from the environment and adapt to statistical variations in the input stimuli, with two primary objectives in mind: (1) highly reliable communication whenever and wherever needed; (2) efficient utilization of the radio spectrum”
Cognitive Radio: Definition and History
Faculty of Science Department of Computer Science 3

CN-S2013
Cisco Report: http://www.cisco.com/en/US/solutions/collateral/ns341/ns525/ns537/ns705/ns827/white_paper_c11-520862.html
Wireless data consumption increases (from Cisco’s report)
4
By 2012, the number of mobile-connected devices will exceed the world's population.
1/27/13 Cisco Visual Networking Index: Global Mobile Data Traffic Forecast Update, 2011–2016 [Visual Networking Index (VNI)] - Cisco Systems
www.cisco.com/en/US/solutions/collateral/ns341/ns525/ns537/ns705/ns827/white_paper_c11-520862.html 2/13
• Tablets will exceed 10 percent of global mobile data traffic in 2016.
• China will exceed 10 percent of global mobile data traffic in 2016.
Global mobile data traffic will increase 18-fold between 2011 and 2016. Mobile data traffic will grow ata compound annual growth rate (CAGR) of 78 percent from 2011 to 2016, reaching 10.8 exabytes per month
by 2016.
By the end of 2012, the number of mobile-connected devices will exceed the number of people on earth,and by 2016 there will be 1.4 mobile devices per capita. There will be over 10 billion mobile-connecteddevices in 2016, including machine-to-machine (M2M) modules-exceeding the world's population at that time
(7.3 billion).
Mobile network connection speeds will increase 9-fold by 2016. The average mobile network connectionspeed (189 kbps in 2011) will exceed 2.9 megabits per second (Mbps) in 2016.
In 2016, 4G will be 6 percent of connections, but 36 percent of total traffic. In 2016, a 4G connection willgenerate 9 times more traffic on average than a non-4G connection.
By 2016, 39 percent of all global mobile devices could potentially be capable of connecting to an IPv6mobile network. Over 4 billion devices will be IPv6-capable in 2016.
Two-thirds of the world's mobile data traffic will be video by 2016. Mobile video will increase 25-foldbetween 2011 and 2016, accounting for over 70 percent of total mobile data traffic by the end of the forecast
period.
Mobile-connected tablets will generate almost as much traffic in 2016 as the entire global mobilenetwork in 2012. The amount of mobile data traffic generated by tablets in 2016 (1.1 exabytes per month) willbe approximately equal to the total amount of global mobile data traffic in 2012 (1.3 exabytes per month).
The average smartphone will generate 2.6 GB of traffic per month in 2016, a 17-fold increase over the
2011 average of 150 MB per month. Aggregate smartphone traffic in 2016 will be 50 times greater than it istoday, with a CAGR of 119 percent.
By 2016, over 3.1 exabytes of mobile data traffic will be offloaded to the fixed network by means of dual-mode devices and femtocells each month. Without dual-mode and femtocell offload of handset and tablet
traffic, total mobile data traffic would grow at a CAGR of 84 percent between 2011 and 2016 (21-fold growth),
instead of the projected CAGR of 78 percent (18-fold growth).
The Middle East and Africa will have the strongest mobile data traffic growth of any region at 104percent CAGR. This region will be followed by Asia Pacific at 84 percent and Central and Eastern Europe at83 percent.
China will account for over 10 percent of global mobile data traffic in 2016, up from less than 5 percentin 2011.
Appendix A summarizes the details and methodology of the VNI forecast.
2011 Year in Review and Outlook for 2012
Mobile Data Traffic More Than Doubled in 2011
Global mobile data traffic more than doubled (2.3-fold growth, or 133 percent increase) in 2011, for the fourth
year in a row. It is a testament to the momentum of the mobile industry that this growth persisted despite
global economic uncertainties, the broad implementation of tiered mobile data packages, and an increase in
the amount of mobile traffic offloaded to the fixed network.
Mobile Data Traffic Will Double Again in 2012
Cisco estimates that traffic in 2012 will grow 2.1-fold (110 percent), reflecting a continuation in the tapering of
growth rates. The evolving device mix and the migration of traffic from the fixed network to the mobile network
have the potential to bring the growth rate higher, while tiered pricing and traffic offload may reduce this
effect. The current growth rates of mobile data traffic resemble those of the fixed network from 1997 through
2001, when the average yearly growth was 150 percent (Table 1). In the case of the fixed network, the growth
rate remained in the range of 150 percent for 5 years.
Table 1. Global Mobile Data Growth Today is Similar to Global Internet Growth in the Late 1990s
Global Internet Traffic Growth (Fixed) Global Mobile Data Traffic Growth
1997 178% 2009 140%
1998 124% 2010 159%
1999 128% 2011 133%
2000 195% 2012 (estimate) 110%
2001 133% 2013 (estimate) 90%
2002 103% 2014 (estimate) 78%
Source: Cisco VNI Mobile, 2012
In the long term, mobile data and fixed traffic should settle into the same growth rate, although the mobile
data growth rate is likely to remain higher than the fixed growth rate over the next decade.
Global Mobile Data Traffic, 2011 to 2016
Overall mobile data traffic is expected to grow to 10.8 exabytes per month by 2016, an 18-fold increase over
2011. Mobile data traffic will grow at a CAGR of 78 percent from 2011 to 2016 (Figure 1).
Figure 1. Cisco Forecasts 10.8 Exabytes per Month of Mobile Data Traffic by 2016

CN-S2013
u Radio spectrum: 3kHz to 300 GHz
u The use of radio spectrum for communication dates back to
How is the wireless spectrum is managed?
Faculty of Science Department of Computer Science 5
Image from http://kids.britannica.com/elementary/art-87886/Guglielmo-Marconi-is-pictured-with-his-telegraph-equipment
u 1895: Guglielmo Marconi, radio signal transmission using telegraph codes over 1,25 mile distance
u Static Spectrum Access

CN-S2013 Faculty of Science Department of Computer Science 6
Use of radio frequencies
3 kHz
R a d i o s p e c t r u m
Electromagnetic spectrum [Hz]
1023
1022
1021
1020
1019
1018
1017
1016
1015
1014
1012
1012
1011
1010
109
108
107
106
105
104
103
102
101
Not
allocated
LA PR-27 CB
TV
PMR
RHA68
FM-radio
PMR
TV Terrestrial digital audio broadcasting
Virve PMR TV and Digital TV GSM
900
GPS
Wind profiler radars
Sat. nav.
GSM1800 DECT UMTS
UMTS
RLAN WLAN Blue- Tooth
IMT-2000/UMTS expansion band
FWA RLAN WLAN
FWA
FWA
Not allocated
Fixed
Mobile
Broadcasting
Maritime mobile Aeronautical mobile
Mobile-satellite
Land mobile
Earth exploration-satellite
Fixed-satellite
Space operation
Amateur Radio astronomy
Space research
Inter-satellite
Broadcasting-satellite Meteorological-satellite
Radiolocation
Radionavigation-satellite Maritime radionavigation Aeronautical radionavigation Radionavigation
30 kHz 300 kHz 3 MHz 30 MHz
30 MHz 300 MHz 100 MHz 200 MHz
300 MHz 3 GHz 2 GHz 1 GHz
3 GHz 10 GHz 20 GHz 30 GHz
30 GHz 100 GHz 200 GHz 300 GHz
Note: The division of frequencies between services and the usageindicated in the picture only gives an overview of the frequencyutilisation. More detailed information can be obtained fromFICORA’s Regulation 4 and the annexed Frequency AllocationTable (links from this picture). FICORA, 16.2.2005
VLF LF MF HF
VHF
UHF
SHF
EHF
VLF (Very Low Frequency) VHF (Very High Frequency) LF (Low Frequency) UHF (Ultra High Frequency) MF (Medium Frequency) SHF (Super High Frequency) HF (High Frequency) EHF (Extremely High Frequency)
Use of Radio Frequencies in Finland (www.ficora.fi)

CN-S2013
u License for a large region, usually country-wide u Large chunk of licensed spectrum (expensive licenses) u Barriers to new ideas u Prohibited spectrum access by unlicensed users u ISM bands are unlicensed à WLAN bands at 2.4 GHz, 5 GHz u Temporary short range licenses
Shortcomings of current spectrum management
Faculty of Science Department of Computer Science 7

CN-S2013
u The Finnish Communications Regulatory Authority (FICORA) u International Telecommunication Union (ITU) u European Telecommunications Standards Institute (ETSI)
Radio Spectrum Use in Finland
Faculty of Science Department of Computer Science 8

CN-S2013
Ficora allocates spectrum in Finland
Faculty of Science Department of Computer Science 9
How much is this frequency? Calculate the fee for frequency! http://www.ficora.fi/en/index/luvat/taajuusmaksut/laskentakaavatjakertoimet.html You can check from this document: http://www.ficora.fi/attachments/englantiav/673vb43bJ/TJTen_20042012.pdf You can find radio spectrum regulations in Finland here: http://www.ficora.fi/en/index/palvelut/palvelutaiheittain/radiotaajuudet.html

CN-S2013
Spectrum Measurements
Faculty of Science Department of Computer Science 10
Image from RWTH http://www.inets.rwth-aachen.de/static-spectrum.html
Image from http://www.cmpe.boun.edu.tr/WiCo/doku.php?id=research#cognitive_radio
u Measurement campaigns have shown that there is plenty of unused spectrum!
u Working time vs. night time usage
u City-center to suburb usage

CN-S2013
Cognitive Radio (CR)
11 Faculty of Science Department of Computer Science
u There is a huge demand for spectrum, but there is unused spectrum à Radio spectrum is inefficiently used. § Change in ownership; a resource is owned by the one who uses it. Sharing for sustainability.
§ Static spectrum management since 1900s.
§ Imagine a world with no-lane-changing.
§ Smarter schemes: Dynamic spectrum access (DSA)

CN-S2013 Faculty of Science Department of Computer Science 12
Primary User, Secondary User
q Licensed, primary, incumbent, higher-priority user: PU
q Secondary, cognitive, unlicensed user: SU, CR
q Spectrum hole, white space, white spectrum, idle frequency/channel/band
Cognitive Radio in Brief
Basic Definitions
Time
Power Frequency
PU transmission CR
Primary User (PU),Licensed User,Incumbent User
Spectrum opportunity,white space, hole, gap
Secondary User (SU),Cognitive Radio (CR)
What: A CognitiveRadio (CR): smart radio,DSA capability,environment-aware,self-aware, adaptive
Suzan Bayhan (HIIT) Energy-E!cient Scheduling for Cellular CRNs October 2012 4 / 38

CN-S2013
u Hardware: Static, once designed at the factory, never changed u SDR: Reconfigurable radio (e.g. operation frequency, modulation type) u Multiple standards u Multiple bands
Software Defined Radio (SDR)
Faculty of Science Department of Computer Science 13
SDR is the building block of the CR.
CN-S2013
How does cognitive radio work?
Faculty of Science Department of Computer Science 14
Cognitive Radio in Brief
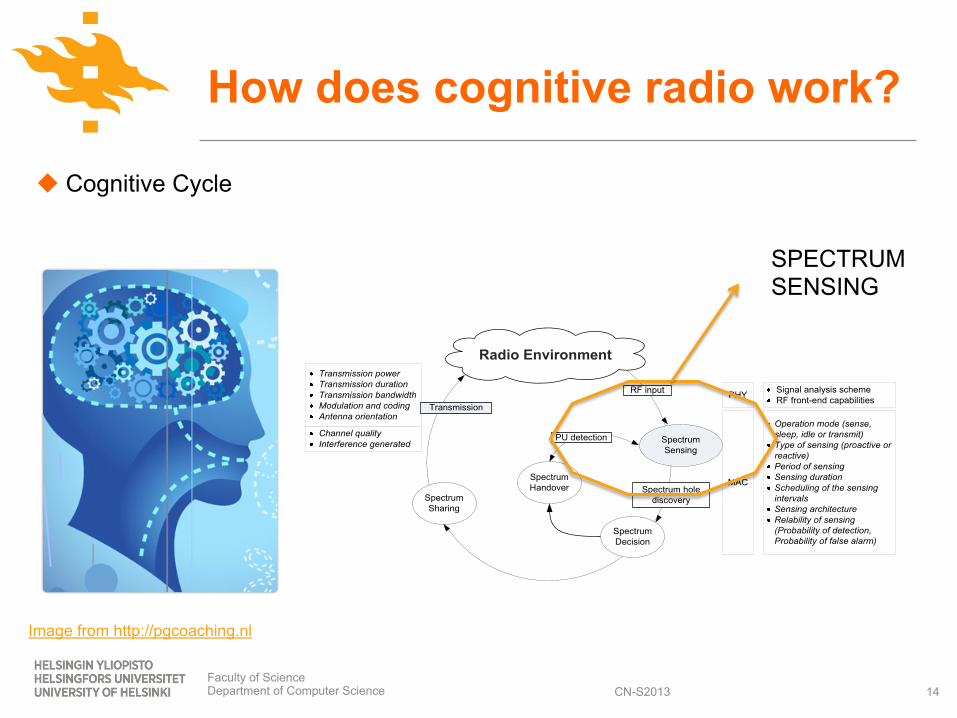
Cognitive Cycle
Spectrum Handover
Signal analysis schemeRF front-end capabilities
Transmission powerTransmission durationTransmission bandwidthModulation and codingAntenna orientation
Operation mode (sense, sleep, idle or transmit)Type of sensing (proactive or reactive)Period of sensingSensing duration Scheduling of the sensing intervalsSensing architectureRelability of sensing (Probability of detection, Probability of false alarm)
PHY
MAC
Channel qualityInterference generated
Radio Environment
Spectrum Sensing
RF input
Spectrum Decision
Spectrum Sharing
Transmission
Spectrum hole discovery
PU detection
CR: a wireless device that can switch from one frequency to another.
Suzan Bayhan (HIIT) Energy-E!cient Scheduling for Cellular CRNs October 2012 5 / 38
SPECTRUM SENSING
u Cognitive Cycle
Image from http://pgcoaching.nl
CN-S2013
Reading Material: - T. Yucek and H. Arslan A survey of spectrum sensing algorithms for cognitive radio applications, IEEE Communications Surveys and Tutorials, vol. 11, no. 1, pp. 116-130, 2009. - Ghasemi, Amir, and Elvino S. Sousa. Spectrum sensing in cognitive radio networks: requirements, challenges and design trade-offs. IEEE Communications Magazine, 46.4 (2008): 32-39.
Spectrum Sensing Reading Material
Faculty of Science Department of Computer Science 15

CN-S2013
What is spectrum sensing?
Faculty of Science Department of Computer Science 16
Time
Time 1- Sense: There is PU
2- Sense: IDLE 3- Sense: PU PU collision: Interference or harmful interference

CN-S2013
1- Sense for vacating the band if PU arrives. CR must not harm PUs 2- Sense for finding unused spectrum How to measure quality of sensing? • Probability of detection (Pd) à Higher is better • Probability of false alarm (Pf) à Lower is better
Spectrum Sensing
Faculty of Science Department of Computer Science 17

CN-S2013
Various aspects of spectrum sensing
Faculty of Science Department of Computer Science 18
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 117
Multi-Dimens ional Spectrum Sensing External Sensing
Dis tributed
Centralized
Cooperative
Local (Device-centric)
Cooperative Sensing
Geo-location + Database
Beacon
External Sensing
Internal (Collacotaed) Sensing
Approaches
Bluetooth
IEEE 802.22
IEEE 802.11k
Standards that employ sensing
Reactive/Proactive sensing
Waveform Based Sensing
Radio Identification Based Sensing
Spectral Correlation (Cyclostationarity)
Energy Detector
Matched Filtering
Enabling Algorithms
Sensing Frequency and Duration
Security
Decision Fusion
Spread Spectrum Users
Hidden Primary User Problem
Hardware Requirements
Challenges
Spectrum Sensing
Fig. 1. Various aspects of spectrum sensing for cognitive radio.
modeling of network traffic and utilization of these models forprediction of primary user behavior is studied in Section VI.Finally, sensing features of some modern wireless standardsare explained in Section VII and our conclusions are presentedin Section VIII.
II. MULTI-DIMENSIONAL SPECTRUM AWARENESS
The definition of opportunity determines the ways of mea-suring and exploiting the spectrum space. The conventionaldefinition of the spectrum opportunity, which is often definedas “a band of frequencies that are not being used by theprimary user of that band at a particular time in a particulargeographic area” [7], only exploits three dimensions of thespectrum space: frequency, time, and space. Conventionalsensing methods usually relate to sensing the spectrum in thesethree dimensions. However, there are other dimensions thatneed to be explored further for spectrum opportunity. For ex-ample, the code dimension of the spectrum space has not beenexplored well in the literature. Therefore, the conventionalspectrum sensing algorithms do not know how to deal withsignals that use spread spectrum, time or frequency hoppingcodes. As a result, these types of signals constitute a majorproblem in sensing the spectrum as discussed in Section III-C.If the code dimension is interpreted as part of the spectrumspace, this problem can be avoided and new opportunitiesfor spectrum usage can be created. Naturally, this bringsabout new challenges for detection and estimation of thisnew opportunity. Similarly, the angle dimension has not beenexploited well enough for spectrum opportunity. It is assumedthat the primary users and/or the secondary users transmitin all the directions. However, with the recent advances inmulti-antenna technologies, e.g. beamforming, multiple userscan be multiplexed into the same channel at the same timein the same geographical area. In other words, an additionaldimension of spectral space can be created as opportunity.This new dimension also creates new opportunities for spectralestimation where not only the frequency spectrum but alsothe angle of arrivals (AoAs) needs to be estimated. Pleasenote that angle dimension is different than geographical spacedimension. In angle dimension, a primary and a secondaryuser can be in the same geographical area and share thesame channel. However, geographical space dimension refersto physical separation of radios in distance.
With these new dimensions, sensing only the frequencyspectrum usage falls short. The radio space with the introduceddimensions can be defined as “a theoretical hyperspace occu-pied by radio signals, which has dimensions of location, angleof arrival, frequency, time, and possibly others” [8], [9]. Thishyperspace is called electrospace, transmission hyperspace,radio spectrum space, or simply spectrum space by various au-thors, and it can be used to describe how the radio environmentcan be shared among multiple (primary and/or secondary)systems [9]–[11]. Various dimensions of this space and corre-sponding measurement/sensing requirements are summarizedin Table I along with some representative pictures. Eachdimension has its own parameters that should be sensed for acomplete spectrum awareness as indicated in this table.
It is of crucial importance to define such an n-dimensionalspace for spectrum sensing. Spectrum sensing should includethe process of identifying occupancy in all dimensions of thespectrum space and finding spectrum holes, or more preciselyspectrum space holes. For example a certain frequency can beoccupied for a given time, but it might be empty in anothertime. Hence, temporal dimension is as important as frequencydimension. The idle periods between bursty transmissions ofwireless local area network (WLAN) signals are, for example,exploited for opportunistic usage in [12]. This example can beextended to the other dimensions of spectrum space given inTable I. As a result of this requirement, advanced spectrumsensing algorithms that offer awareness in multiple dimensionsof the spectrum space should be developed.
III. CHALLENGES
Before getting into the details of spectrum sensing tech-niques, challenges associated with the spectrum sensing forcognitive radio are given in this section.
A. Hardware RequirementsSpectrum sensing for cognitive radio applications requires
high sampling rate, high resolution analog to digital converters(ADCs) with large dynamic range, and high speed signal pro-cessors. Noise variance estimation techniques have been popu-larly used for optimal receiver designs like channel estimation,soft information generation etc., as well as for improved hand-off, power control, and channel allocation techniques [13].
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.

CN-S2013 11 April 2012 Faculty of Science Department of Computer Science 19
Sensing: PHY and MAC Layer Issues
PHY Sensing Spectrum Sensor at PHY
MAC Sensing Sensing and access strategy
CR SENSING DESIGN = SENSOR + SENSING STRATEGY + ACCESS

CN-S2013
u Energy Detector: Measures the energy received on a primary band during an observation interval and declares a white space if the measured energy is less than a properly set threshold. (2) Do not differentiate PU and CR signals (3) Low complexity u Waveform-based Sensing: (1) Preambles, midambles can be used to detect PU signals. (2) Short measurement time; Susceptible to synchronization errors u Match Filtering MF: (1) If transmitted signal is known, test using filters. (2) Dedicated circuitry for each primary licensee u Radio Identification: Identifying the transmission technologies used by PUs, channel bandwidth, coverage etc. u Cyclostationary: PU signal differentiated from noise
PHY Sensing
Faculty of Science Department of Computer Science 20
CN-S2013
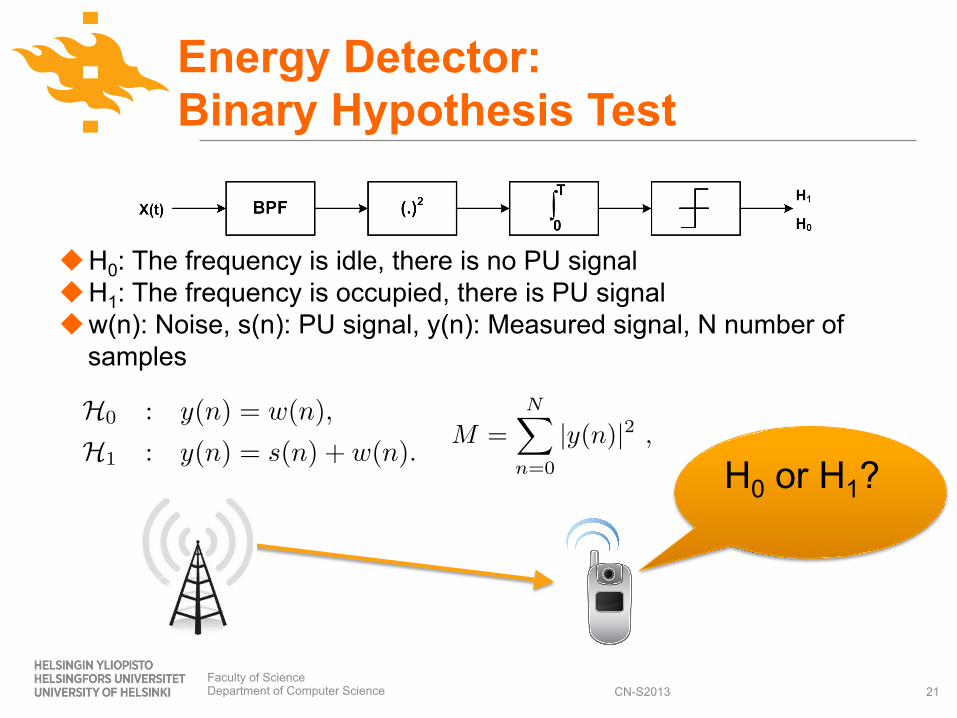
Energy Detector: Binary Hypothesis Test
Faculty of Science Department of Computer Science 21
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 121
and poor performance under low signal-to-noise ratio (SNR)values [48]. Moreover, energy detectors do not work efficientlyfor detecting spread spectrum signals [26], [59].
Let us assume that the received signal has the followingsimple form
y(n) = s(n) + w(n) (1)
where s(n) is the signal to be detected, w(n) is the additivewhite Gaussian noise (AWGN) sample, and n is the sampleindex. Note that s(n) = 0 when there is no transmission byprimary user. The decision metric for the energy detector canbe written as
M =N!
n=0
|y(n)|2 , (2)
where N is the size of the observation vector. The decisionon the occupancy of a band can be obtained by comparingthe decision metric M against a fixed threshold !E . Thisis equivalent to distinguishing between the following twohypotheses:
H0 : y(n) = w(n), (3)
H1 : y(n) = s(n) + w(n). (4)
The performance of the detection algorithm can be sum-marized with two probabilities: probability of detection PD
and probability of false alarm PF . PD is the probability ofdetecting a signal on the considered frequency when it trulyis present. Thus, a large detection probability is desired. It canbe formulated as
PD = Pr (M > !E |H1) . (5)
PF is the probability that the test incorrectly decides that theconsidered frequency is occupied when it actually is not, andit can be written as
PF = Pr (M > !E |H0) . (6)
PF should be kept as small as possible in order to preventunderutilization of transmission opportunities. The decisionthreshold !E can be selected for finding an optimum balancebetween PD and PF . However, this requires knowledge ofnoise and detected signal powers. The noise power can beestimated, but the signal power is difficult to estimate as itchanges depending on ongoing transmission characteristicsand the distance between the cognitive radio and primaryuser. In practice, the threshold is chosen to obtain a certainfalse alarm rate [65]. Hence, knowledge of noise variance issufficient for selection of a threshold.
The white noise can be modeled as a zero-mean Gaussianrandom variable with variance "2
w, i.e. w(n) = N (0, "2w).
For a simplified analysis, let us model the signal term as azero-mean Gaussian variable as well, i.e. s(n) = N (0, "2
s).The model for s(n) is more complicated as fading shouldalso be considered. Because of these assumptions, the decisionmetric (2) follows chi-square distribution with 2N degrees offreedom #2
2N and hence, it can be modeled as
M =
"!2
w2 #2
2N H0,!2
w+!2s
2 #22N H1.
(7)
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Probability of Detection (PD)
Prob
abilit
y of
Fal
se A
larm
(PF)
SNR=ï2.5 dBSNR=0 dBSNR=2.5 dB
Fig. 3. ROC curves for energy detector based spectrum sensing underdifferent SNR values.
For energy detector, the probabilities PF and PD can becalculated as [41]1
PF = 1 ! !#
LfLt,!E
"2w
$, (8)
PD = 1 ! !#
LfLt,!E
"2w + "2
s
$, (9)
where !E is the decision threshold, and ! (a, x) is the incom-plete gamma function as given in [66] (ref. Equation 6.5.1).In order to compare the performances for different thresholdvalues, receiver operating characteristic (ROC) curves can beused. ROC curves allow us to explore the relationship betweenthe sensitivity (probability of detection) and specificity (falsealarm rate) of a sensing method for a variety of differentthresholds, thus allowing the determination of an optimalthreshold. Fig. 3 shows the ROC curves for different SNRvalues. SNR is defined as the ratio of the primary user’s signalpower to noise power, i.e. SNR="2
s/"2w. The number of used
samples is set to 15 in this figure, i.e. N = 15 in (2). As thisfigure clearly shows, the performance of the threshold detectorincreases at high SNR values.
The threshold used in energy detector based sensing algo-rithms depends on the noise variance. Consequently, a smallnoise power estimation error causes significant performanceloss [67]. As a solution to this problem, noise level is estimateddynamically by separating the noise and signal subspacesusing multiple signal classification (MUSIC) algorithm [68].Noise variance is obtained as the smallest eigenvalue of theincoming signal’s autocorrelation. Then, the estimated valueis used to choose the threshold for satisfying a constant falsealarm rate. An iterative algorithm is proposed to find thedecision threshold in [62]. The threshold is found iteratively tosatisfy a given confidence level, i.e. probability of false alarm.Forward methods based on energy measurements are studiedfor unknown noise power scenarios in [54]. The proposed
1Please note that the notation used in [41] is slightly different. Moreover,the noise power is normalized before it is fed into the threshold device in [41].
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
u H0: The frequency is idle, there is no PU signal u H1: The frequency is occupied, there is PU signal u w(n): Noise, s(n): PU signal, y(n): Measured signal, N number of
samples
H0 or H1?
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 121
and poor performance under low signal-to-noise ratio (SNR)values [48]. Moreover, energy detectors do not work efficientlyfor detecting spread spectrum signals [26], [59].
Let us assume that the received signal has the followingsimple form
y(n) = s(n) + w(n) (1)
where s(n) is the signal to be detected, w(n) is the additivewhite Gaussian noise (AWGN) sample, and n is the sampleindex. Note that s(n) = 0 when there is no transmission byprimary user. The decision metric for the energy detector canbe written as
M =N!
n=0
|y(n)|2 , (2)
where N is the size of the observation vector. The decisionon the occupancy of a band can be obtained by comparingthe decision metric M against a fixed threshold !E . Thisis equivalent to distinguishing between the following twohypotheses:
H0 : y(n) = w(n), (3)
H1 : y(n) = s(n) + w(n). (4)
The performance of the detection algorithm can be sum-marized with two probabilities: probability of detection PD
and probability of false alarm PF . PD is the probability ofdetecting a signal on the considered frequency when it trulyis present. Thus, a large detection probability is desired. It canbe formulated as
PD = Pr (M > !E |H1) . (5)
PF is the probability that the test incorrectly decides that theconsidered frequency is occupied when it actually is not, andit can be written as
PF = Pr (M > !E |H0) . (6)
PF should be kept as small as possible in order to preventunderutilization of transmission opportunities. The decisionthreshold !E can be selected for finding an optimum balancebetween PD and PF . However, this requires knowledge ofnoise and detected signal powers. The noise power can beestimated, but the signal power is difficult to estimate as itchanges depending on ongoing transmission characteristicsand the distance between the cognitive radio and primaryuser. In practice, the threshold is chosen to obtain a certainfalse alarm rate [65]. Hence, knowledge of noise variance issufficient for selection of a threshold.
The white noise can be modeled as a zero-mean Gaussianrandom variable with variance "2
w, i.e. w(n) = N (0, "2w).
For a simplified analysis, let us model the signal term as azero-mean Gaussian variable as well, i.e. s(n) = N (0, "2
s).The model for s(n) is more complicated as fading shouldalso be considered. Because of these assumptions, the decisionmetric (2) follows chi-square distribution with 2N degrees offreedom #2
2N and hence, it can be modeled as
M =
"!2
w2 #2
2N H0,!2
w+!2s
2 #22N H1.
(7)
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Probability of Detection (PD)
Prob
abilit
y of
Fal
se A
larm
(PF)
SNR=ï2.5 dBSNR=0 dBSNR=2.5 dB
Fig. 3. ROC curves for energy detector based spectrum sensing underdifferent SNR values.
For energy detector, the probabilities PF and PD can becalculated as [41]1
PF = 1 ! !#
LfLt,!E
"2w
$, (8)
PD = 1 ! !#
LfLt,!E
"2w + "2
s
$, (9)
where !E is the decision threshold, and ! (a, x) is the incom-plete gamma function as given in [66] (ref. Equation 6.5.1).In order to compare the performances for different thresholdvalues, receiver operating characteristic (ROC) curves can beused. ROC curves allow us to explore the relationship betweenthe sensitivity (probability of detection) and specificity (falsealarm rate) of a sensing method for a variety of differentthresholds, thus allowing the determination of an optimalthreshold. Fig. 3 shows the ROC curves for different SNRvalues. SNR is defined as the ratio of the primary user’s signalpower to noise power, i.e. SNR="2
s/"2w. The number of used
samples is set to 15 in this figure, i.e. N = 15 in (2). As thisfigure clearly shows, the performance of the threshold detectorincreases at high SNR values.
The threshold used in energy detector based sensing algo-rithms depends on the noise variance. Consequently, a smallnoise power estimation error causes significant performanceloss [67]. As a solution to this problem, noise level is estimateddynamically by separating the noise and signal subspacesusing multiple signal classification (MUSIC) algorithm [68].Noise variance is obtained as the smallest eigenvalue of theincoming signal’s autocorrelation. Then, the estimated valueis used to choose the threshold for satisfying a constant falsealarm rate. An iterative algorithm is proposed to find thedecision threshold in [62]. The threshold is found iteratively tosatisfy a given confidence level, i.e. probability of false alarm.Forward methods based on energy measurements are studiedfor unknown noise power scenarios in [54]. The proposed
1Please note that the notation used in [41] is slightly different. Moreover,the noise power is normalized before it is fed into the threshold device in [41].
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
9
Figure 2.2. Block diagram of conventional energy detector.
2.2.1. Conventional Energy Detection in AWGN Channel
Under AWGN channel, energy received (Oi =2TW!j=1
Y 2ij) by secondary user i follows
the distribution
f(Oi|!) !
"#
$"22TW H0
"22TW (2!) H1
(2.2)
where "22TW and "2
2TW (2!) represent central and non-central chi square distributions
[10, 22, 23], TW and ! represent the time bandwidth product and SNR, respectively.
Under AWGN channel conditions, SNR value is fixed and it a!ects the separation be-
tween conditional probability distribution functions. Example probability distribution
functions with di!erent SNR values are depicted in Figure 2.3.
0 10 20 30 40 50 600
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Oi
f( O
i )
χ22TW
χ22TW(2γ); γ=1dB
χ22TW(2γ); γ=10dB
Figure 2.3. Example Oi probability distribution functions with di!erent SNR values
(TW = 5).
High SNR separates the distributions enough to decide safely and with a rea-
sonable probability of error. However, under low SNR conditions it is di"cult to

CN-S2013
Effect of Signal to Noise Ratio (SNR)
Faculty of Science Department of Computer Science 22
Decibel: 10log10(P2/P1)
Generally, sensing performance increases under increasing SNR.

CN-S2013
Comparison of Sensing Schemes
Faculty of Science Department of Computer Science 23
124 IEEE COMMUNICATIONS SURVEYS & TUTORIALS, VOL. 11, NO. 1, FIRST QUARTER 2009
Cyclostationary
RadioIdentification
MatchFilteringSensing
Waveform-based
EnergyDetector
Acc
urac
y
Complexity
Fig. 4. Main sensing methods in terms of their sensing accuracies andcomplexities.
be a priori information about the primary user’s characteristicsand primary users should transmit known patterns or pilots.
The performance of energy detector based sensing is limitedwhen two common assumptions do not hold [25]. The noisemay not be stationary and its variance may not be known.Other problems with the energy detector include basebandfilter effects and spurious tones [63]. It is stated in literaturethat cyclostationary-based methods perform worse than energydetector based sensing methods when the noise is stationary.However, in the presence of co-channel or adjacent channelinterferers, noise becomes non-stationary. Hence, energy de-tector based schemes fail while cyclostationarity-based algo-rithms are not affected [85]. On the other hand, cyclostationaryfeatures may be completely lost due to channel fading [83],[100]. It is shown in [100] that model uncertainties cause anSNR wall for cyclostationary based feature detectors simi-lar to energy detectors [92]. Furthermore, cyclostationarity-based sensing is known to be vulnerable to sampling clockoffsets [85].
While selecting a sensing method, some tradeoffs shouldbe considered. The characteristics of primary users are themain factor in selecting a method. Cyclostationary featurescontained in the waveform, existence of regularly transmittedpilots, and timing/frequency characteristics are all important.Other factors include required accuracy, sensing durationrequirements, computational complexity, and network require-ments.
Estimation of traffic in a specific geographic area can bedone locally (by one cognitive radio only) using one of thealgorithms given in this section. However, information fromdifferent cognitive radios can be combined to obtain a moreaccurate spectrum awareness. In the following section, wepresent the concept of cooperative sensing where multiple cog-nitive radios work together for performing spectrum sensingtask collaboratively.
V. COOPERATIVE SENSING
Cooperation is proposed in the literature as a solution toproblems that arise in spectrum sensing due to noise uncer-tainty, fading, and shadowing. Cooperative sensing decreasesthe probabilities of mis-detection and false alarm consider-
ably. In addition, cooperation can solve hidden primary userproblem and it can decrease sensing time [23]–[25].
The interference to primary users caused by cognitive radiodevices employing spectrum access mechanisms based on asimple listen-before-talk (LBT) scheme is investigated in [57]via analysis and computer simulations. Results show thateven simple local sensing can be used to explore the unusedspectrum without causing interference to existing users. Onthe other hand, it is shown analytically and through numericalresults that collaborative sensing provides significantly higherspectrum capacity gains than local sensing. The fact thatcognitive radio acts without any knowledge about the locationof the primary users in local sensing degrades the sensingperformance.
Challenges of cooperative sensing include developing effi-cient information sharing algorithms and increased complex-ity [101], [102]. In cooperative sensing architectures, the con-trol channel (pilot channel) can be implemented using differentmethodologies. These include a dedicated band, an unlicensedband such as ISM, and an underlay system such as ultra wideband (UWB) [103]. Depending on the system requirements,one of these methods can be selected. Control channel canbe used for sharing spectrum sensing results among cognitiveusers as well as for sharing channel allocation information.Various architectures for control channels are proposed in thecognitive radio literature [104], [105]. A time division multipleaccess (TDMA)-based protocol for exchange of sensing datais proposed in [60]. Cognitive radios are divided into clustersand scanning data is sent to the cluster head in slots of framesassigned to a particular cluster. As far as the networking isconcerned, the coordination algorithm should have reducedprotocol overhead and it should be robust to changes andfailures in the network. Moreover, the coordination algorithmshould introduce a minimum amount of delay.
Collaborative spectrum sensing is most effective whencollaborating cognitive radios observe independent fading orshadowing [25], [61]. The performance degradation due tocorrelated shadowing is investigated in [45], [106] in termsof missing the opportunities. It is found that it is moreadvantageous to have the same amount of users collaboratingover a large area than over a small area. In order to combatshadowing, beamforming and directional antennas can alsobe used [25]. In [42], it is shown that cooperating with allusers in the network does not necessarily achieve the optimumperformance and cognitive users with highest primary user’ssignal to noise ratio are chosen for collaboration. In [42],constant detection rate and constant false alarm rate are usedfor optimally selecting the users for collaborative sensing.
Cooperation can be among cognitive radios or externalsensors can be used to build a cooperative sensing network.In the former case, cooperation can be implemented in twofashions: centralized or distributed [107]. These two methodsand external sensing are discussed in the following sections.
A. Centralized SensingIn centralized sensing, a central unit collects sensing infor-
mation from cognitive devices, identifies the available spec-trum, and broadcasts this information to other cognitive radiosor directly controls the cognitive radio traffic.
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
1. Energy Detector 2. Waveform-based Sensing 3. Match Filtering 4. Radio Identification 5. Cyclostationary
CN-S2013
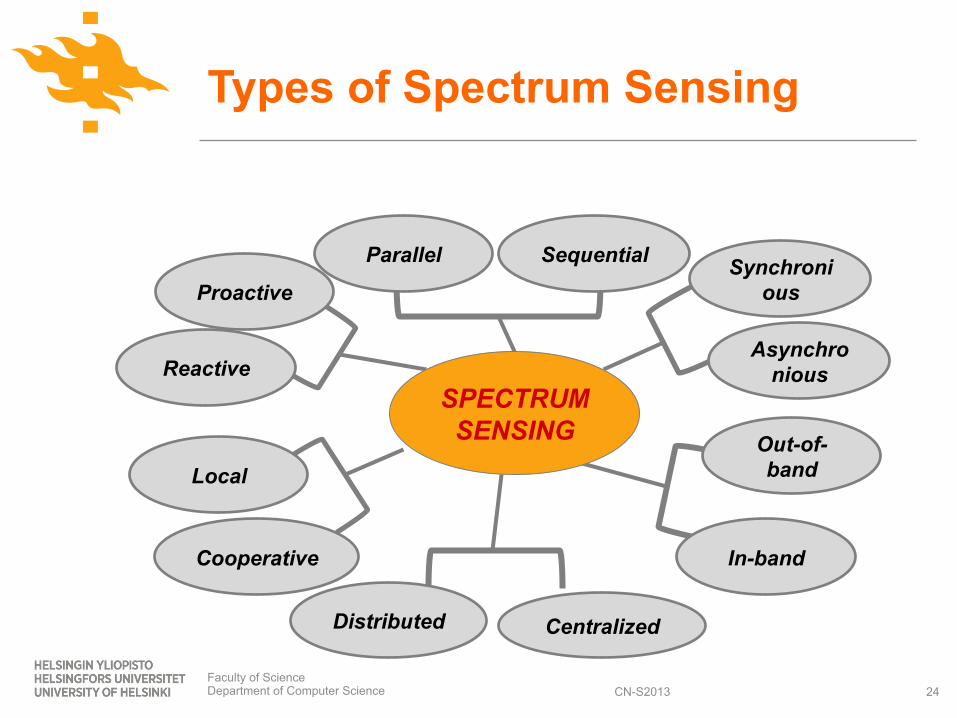
Types of Spectrum Sensing
Faculty of Science Department of Computer Science 24
Proactive
Reactive
Local
Cooperative
Distributed Centralized
In-band
Out-of-band
Synchronious
Asynchronious
Sequential Parallel
SPECTRUM SENSING

CN-S2013
Parallel
Sequential
Proactive
Reactive
Local
Cooperative
Centralized
Distributed
Synchronous
Asynchron.
In-band
Out-of-band
Sense channels 1 to N at the same time (parallel)à requires N sensing device!
If there are N frequency channels
Sequential: Sense channels one by one. Which order? May take too long to find an empty channel.
Parallel vs. Sequential Sensing

CN-S2013
Proactive
Reactive
Local
Cooperative
Centralized
Distributed
Synchronous
Asynchron.
In-band
Out-of-band
Parallel
Sequential Proactive Sensing: CR senses even if it will not transmit immediately, e.g. periodic sensing. q Trade-off collected information about the channels vs. sensing cost Reactive Sensing: CR senses only if it will transmit or receive q Energy-efficient, time to find an idle channel may be longer than Proactive Sensing.
Proactive vs. Reactive Sensing
CN-S2013
Proactive
Reactive
Local
Cooperative
Centralized
Distributed
Synchronous
Asynchron.
In-band
Out-of-band
Parallel
Sequential Local Sensing: Each CR senses itself and uses its sensing data to give a decision on channel state, i.e. idle or busy q What if hidden node or bad channel conditions?
Cooperative Sensing: CR shares its sensing data with others and utilize the sensing outcomes of others to give a decision q Robust to sensing errors due to hidden node or fading channels. q Cost of cooperation?
Cooperative vs. Non-cooperative Sensing

CN-S2013
Cooperative Sensing
Faculty of Science Department of Computer Science 28
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
u More robust to sensing errors.
u Hidden node problem
PU is hidden to the CR. CR’s transmission will result in interference at the PU receiver.
Cooperate with this user!
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.

CN-S2013
Proactive
Reactive
Local
Cooperative
Centralized
Distributed
Synchronous
Asynchron.
In-band
Out-of-band
Parallel
Sequential Centralized A Central Manager (BS or AP) collects CR sensing data and makes a decision on channel state, i.e. idle or busy q Cost of transmission sensing data? q What if the Central Manager fails? Single Point of Failure.
Distributed (Decentralized) Each CR makes decision itself.
Centralized vs. Distributed Sensing

CN-S2013
Centralized/Distributed Cooperative Sensing
Faculty of Science Department of Computer Science 30
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
Decision Fusion Center
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
Increased sensing reliability at the expense of increased communication overhead
How to communicate: Common control channels (CCC)
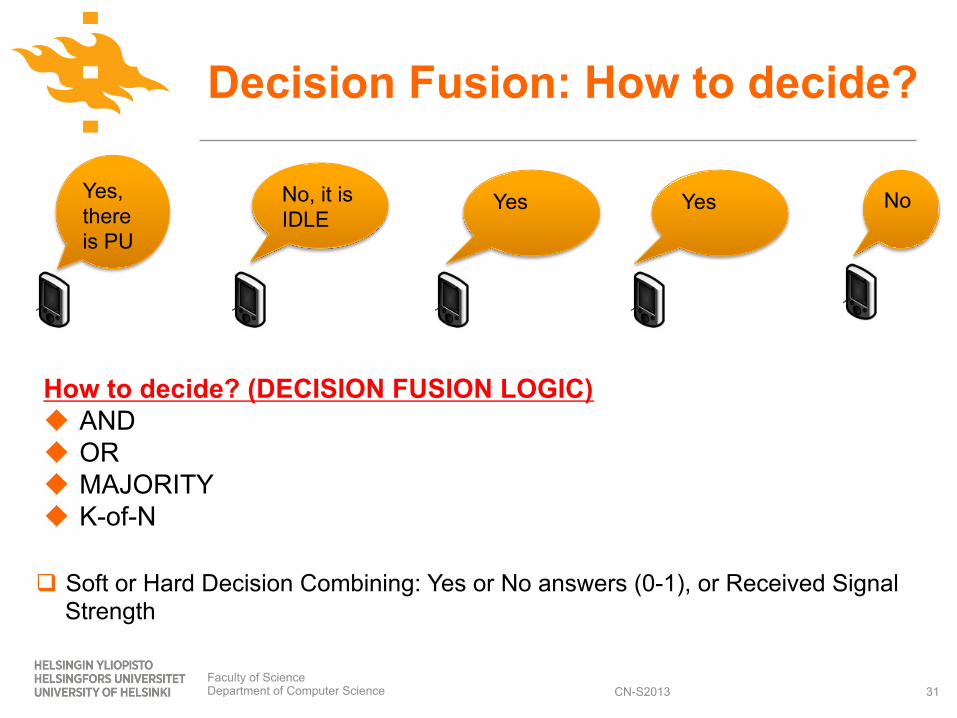
CN-S2013
Decision Fusion: How to decide?
Faculty of Science Department of Computer Science 31
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
Yes, there is PU
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
No, it is IDLE
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
Yes
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
Yes
YUCEK and ARSLAN: A SURVEY OF SPECTRUM SENSING ALGORITHMS FOR COGNITIVE RADIO APPLICATIONS 119
TABLE IICOMPARISON OF SINGLE-RADIO AND DUAL-RADIO SENSING
ALGORITHMS.
Single-Radio Double-Radio
Advantages - Simplicity- Lower cost
- Higher spectrum effi-ciency- Better sensing accuracy
Disadvantages- Lower spectrum effi-ciency- Poor sensing accuracy
- Higher cost- Higher power consump-tion- Higher complexity
in Table II. One might prefer one architecture over the otherdepending on the available resources and performance and/ordata rate requirements.
There are already available hardware and software platformsfor the cognitive radio. GNU Radio [20], Universal SoftwareRadio Peripheral (USRP) [21] and Shared Spectrum’s XGRadio [22] are some to name. Mostly energy detector basedsensing is used in these platforms because of its simplicity.However, there are not much detail in literature on the exactimplementation. Second generation hardware platforms willprobably be equipped with more sophisticated techniques.
B. Hidden Primary User ProblemThe hidden primary user problem is similar to the hidden
node problem in Carrier Sense Multiple Accessing (CSMA). Itcan be caused by many factors including severe multipath fad-ing or shadowing observed by secondary users while scanningfor primary users’ transmissions. Fig. 2 shows an illustrationof a hidden node problem where the dashed circles showthe operating ranges of the primary user and the cognitiveradio device. Here, cognitive radio device causes unwantedinterference to the primary user (receiver) as the primarytransmitter’s signal could not be detected because of thelocations of devices. Cooperative sensing is proposed in theliterature for handling hidden primary user problem [23]–[25].We elaborate on cooperative sensing in Section V.
C. Detecting Spread Spectrum Primary UsersFor commercially available devices, there are two main
types of technologies: fixed frequency and spread spectrum.The two major spread spectrum technologies are frequency-hoping spread-spectrum (FHSS) and direct-sequence spread-spectrum (DSSS). Fixed frequency devices operate at a sin-gle frequency or channel. An example to such systems isIEEE 802.11a/g based WLAN. FHSS devices change theiroperational frequencies dynamically to multiple narrowbandchannels. This is known as hopping and performed accordingto a sequence that is known by both transmitter and receiver.DSSS devices are similar to FHSS devices, however, they usea single band to spread their energy.
Primary users that use spread spectrum signaling are diffi-cult to detect as the power of the primary user is distributedover a wide frequency range even though the actual informa-tion bandwidth is much narrower [26]. This problem can bepartially avoided if the hopping pattern is known and perfectsynchronization to the signal can be achieved as discussed
Fig. 2. Illustration of hidden primary user problem in cognitive radio systems.
in Section II. However, it is not straightforward to designalgorithms that can do the estimation in code dimension.
D. Sensing Duration and FrequencyPrimary users can claim their frequency bands anytime
while cognitive radio is operating on their bands. In orderto prevent interference to and from primary license owners,cognitive radio should be able to identify the presence ofprimary users as quickly as possible and should vacate theband immediately. Hence, sensing methods should be ableto identify the presence of primary users within a certainduration. This requirement poses a limit on the performance ofsensing algorithm and creates a challenge for cognitive radiodesign.
Selection of sensing parameters brings about a tradeoffbetween the speed (sensing time) and reliability of sensing.Sensing frequency, i.e. how often cognitive radio shouldperform spectrum sensing, is a design parameter that needs tobe chosen carefully. The optimum value depends on the capa-bilities of cognitive radio itself and the temporal characteristicsof primary users in the environment [27]. If the statuses ofprimary users are known to change slowly, sensing frequencyrequirements can be relaxed. A good example for such ascenario is the detection of TV channels. The presence of a TVstation usually does not change frequently in a geographicalarea unless a new station starts broadcasting or an existingstation goes offline. In the IEEE 802.22 draft standard (seeSection VII), for example, the sensing period is selected as30 seconds. In addition to sensing frequency, the channel de-tection time, channel move time and some other timing relatedparameters are also defined in the standard [28]. Anotherfactor that affects the sensing frequency is the interferencetolerance of primary license owners. For example, when acognitive radio is exploiting opportunities in public safetybands, sensing should be done as frequently as possible inorder to prevent any interference. Furthermore, cognitive radioshould immediately vacate the band if it is needed by publicsafety units. The effect of sensing time on the performanceof secondary users is investigated in [29]. Optimum sensingdurations to search for an available channel and to monitor aused channel are obtained. The goal is to maximize the av-erage throughput of secondary users while protecting primary
Authorized licensed use limited to: ULAKBIM UASL - BOGAZICI UNIVERSITESI. Downloaded on October 21, 2009 at 09:54 from IEEE Xplore. Restrictions apply.
No
How to decide? (DECISION FUSION LOGIC) u AND u OR u MAJORITY u K-of-N
q Soft or Hard Decision Combining: Yes or No answers (0-1), or Received Signal Strength

CN-S2013
Number of Cooperating Users vs. Sensing Time
11 April 2012 Faculty of Science Department of Computer Science 32
IEEE Communications Magazine • April 2008 37
Compared to multipath fading, shadowingeffects tend to be correlated over a much largerdistance, thereby reducing the diversity gainachievable through short-range cooperation.This is depicted in Fig. 4. In fact, it has beenshown that under spatially correlated shadowing,the cooperation gain is fundamentally limited bythe distance spread of the cooperating users[11]. This limitation has practical implications interms of protocol design as having fewer userscooperate over a large distance may be moreeffective than a dense sensing network confinedto a small area.
Another challenge in the implementation ofcooperative sensing is the issue of user reliabili-ty. For instance, a single malicious user may pre-vent a cognitive radio network from accessing awhite space by sending false reports to the bandmanager. In order to deal with this issue, furtherresearch needs to be done on the design of effi-cient trust management systems in cognitiveradio networks.
DESIGN TRADE-OFFSIn this section we outline the major trade-offsinvolved in the implementation of spectrumsensing functionality in the cognitive radio net-works. The system designer should balance thesetrade-offs according to the application-specificrequirements, hardware cost and complexity, andavailable infrastructure (e.g., to coordinate sens-ing and access) among other considerations.
COOPERATION-PROCESSING TRADE-OFFAs outlined previously, with increasing the num-ber of cooperating users, a target detection sen-sitivity may be achieved by having less sensitivedetectors at the individual users. Given a certaindetector, a relaxed sensitivity requirement istranslated into a shorter sensing time and henceless local processing. This phenomenon is depict-ed in Fig. 5, where the sensing time of localenergy detectors, required to achieve an overalldetection sensitivity of –20 dB (with 99 percentaccuracy), is plotted as a function of the numberof cooperating users under independent Rayleighfading. Furthermore, communication amongusers is assumed to be error-free and the chan-nel bandwidth is set at 1 MHz.
The observation above, however, raises a nat-ural question: how much (local) processing andcooperation is needed, respectively, in order toachieve a certain performance level? In particu-lar, the cooperation overhead generally increaseswith the number of cooperating users due to theincreased volume of data that needs to be report-ed to and be (centrally) processed by the bandmanager. Therefore, there exists a trade-offbetween the local processing overhead and thecooperation overhead as they both add to thetotal sensing time. This trade-off may be bal-anced by finding the optimum levels of process-ing and cooperation, minimizing the total sensingoverhead [12].
Intuitively, the optimum number of cooperat-ing users depends on the efficiency of the under-lying cooperation protocol. For instance, asimple way to collect sensing data is for the bandmanager to poll the cognitive radios one by one.
However, the communication overhead associat-ed with this method increases linearly with thenumber of users. A more efficient technique hasbeen proposed in [13] where all sensing data iscollected simultaneously, thereby allowing ahigher cooperation level at the cost of increasedprotocol complexity. Moreover, the cooperationlevel should be adapted to the fading character-istics. In particular, as the fading becomes lesssevere (e.g., if there is a line of sight to the pri-mary user), the optimum trade-off between localprocessing and cooperation will be tilted moretoward processing. Informally speaking, this is
! Figure 4. Required sensitivity of individual cognitive radios to achieve anoverall detection sensitivity of –20 dB under Rayleigh fading vs. the number ofcooperating users.
Number of cooperating users21
–20
–18
Sens
itivi
ty r
equi
red
at e
ach
dete
ctor
(dB)
–16
–14
–12
–10
–8
–6
–4
3 4 5 6 7 8 9 10
! Figure 5. Cooperation-processing trade-off under Rayleigh fading.
Number of cooperating users21
10–2
10–1
Sens
ing
time
(ms)
100
101
102
103
3 4 5 6 7 8 9 10
GHASEMI LAYOUT 3/24/08 2:13 PM Page 37
Amir Ghasemi and Elvino S. Sousa, Spectrum Sensing in Cognitive Radio Networks: Requirements,Challenges and Design Trade-offs
u Cooperation overhead generally increases with the number of cooperating
u Optimal number of cooperating users
Single CR or 5 CRs

CN-S2013
Proactive
Reactive
Local
Cooperative
Centralized
Distributed
Synchronous
Asynchron.
In-band
Out-of-band
Parallel
Sequential Synchronous All CRs have the same sensing schedule to sense a channel. q How to synchronize? q Stop transmission and sense the medium.
Asynchronous Each CR has its own schedule to sense a channel. q If other CRs are transmitting while this CR is sensing, how to distinguish between SU and PU signal.
Synchronous vs. Asynchronous Sensing

CN-S2013
Proactive
Reactive
Local
Cooperative
Centralized
Distributed
Synchronous
Asynchron.
In-band
Out-of-band
Parallel
Sequential In-band CR senses the channel that it is already transmitting - To detect if a PU appears
Out-of-band CR senses channels other than the channel it is in q To find other spectrum holes q To find another channel to switch since a PU has already appeared.
In-band vs. Out-of-band Sensing

CN-S2013
u Hardware requirements: § High speed processing units (DSPs or FPGAs) performing
computationally demanding signal processing tasks with relatively low delay.
§ Operation in a wide spectrum range
u Sensing-Transmission Tradeoff u Security: a selfish or malicious user can modify its air interface to mimic a primary user.
Challenges of Spectrum Sensing
Faculty of Science Department of Computer Science 35

CN-S2013
u Static spectrum access is cumbersome! u CR facilitates unused spectrum to be used opportunistically. u Spectrum sensing facilitates discovery of unoccupied spectrum. u The spectrum sensing can be designed considering various
criteria at MAC and PHY layer. u The longer is the sensing duration, generally the higher is the
sensing reliability. u Cooperation increases sensing performance but has higher
overhead.
Summary
36 Faculty of Science Department of Computer Science

CN-S2013
References
Faculty of Science Department of Computer Science 37
u T. Yucek and H. Arslan, A survey of spectrum sensing algorithms for cognitive radio applications, IEEE Communications Surveys and Tutorials, vol. 11, no. 1, pp. 116-130, 2009.
u Ghasemi, Amir, and Elvino S. Sousa. Spectrum sensing in cognitive radio
networks: requirements, challenges and design trade-offs. IEEE Communications Magazine, 46.4 (2008): 32-39.

CN-S2013
Questions?
Faculty of Science Department of Computer Science 38

CN-S2013
Self-Study: Make sure you know all the terms below
11 April 2012 Faculty of Science Department of Computer Science 39
u Primary User u Secondary User u Cognitive Radio u Spectrum Hole u Spectrum Sensing u Harmful Interference u SNR u Cooperative Sensing u Dynamic Spectrum Access u Static Spectrum Access u Spectrum Underutilization u Sensing-transmission trade-off u Decision fusion logic

CN-S2013
Presentation Schedule
Faculty of Science Department of Computer Science 40
Feb 5
Feb 12 Presentation 1: Cognitive Networks (CN)
Feb 19 Presentation 2: Routing in CR Ad Hoc Networks (RA)
Feb 26 No class
March 12 Presentation 3: Cognitive Capabilities in Non-Cognitive Networks (CC)
March 19 Presentation 4: Economics of Cognitive Radio (EC)
March 26 Presentation 5: Radio Environment Maps (REM)
April 2 Presentation 6: Security Issues in CRNs (SEC)
April 9 Presentation 7: Machine Learning for CR (ML)
April 16 Presentation 8: Distributed Spectrum Access (DA)
April 23 Presentation 9: Energy efficiency (EE) and Closing Remarks
!

CN-S2013
Next week
q 2-Minute Madness Session: In two minutes present your topic’s basic idea, questions, etc! Only 2 minutes.
Faculty of Science Department of Computer Science 41















![Spectrum Inference in Cognitive Radio Networks: Algorithms and … · 2019. 12. 16. · 2016 [24] A survey on measurement-based spectrum occupancy modeling for cognitive radios. Spectrum](https://static.fdocuments.in/doc/165x107/5fce0778c537f8132675114b/spectrum-inference-in-cognitive-radio-networks-algorithms-and-2019-12-16-2016.jpg)

