Overview
32
© DEEDS – OS 1 Overview Resource Sharing & Inter-Process Interactions Issues and Problems (Deadlocks, CS, ME…) Task Orderings (Scheduling …) Algorithmic Solutions (Races, ME…) Program Level Solutions (Semaphores, Monitors)
-
Upload
heidi-farmer -
Category
Documents
-
view
22 -
download
0
description
Overview. Resource Sharing & Inter-Process Interactions Issues and Problems (Deadlocks, CS, ME…) Task Orderings (Scheduling …) Algorithmic Solutions (Races, ME…) Program Level Solutions (Semaphores, Monitors). Deadlocks Starvation. How to allocate a resource to have progress… - PowerPoint PPT Presentation
Transcript of Overview

© DEEDS – OS 1
Overview
Resource Sharing & Inter-Process Interactions Issues and Problems (Deadlocks, CS, ME…) Task Orderings (Scheduling …) Algorithmic Solutions (Races, ME…) Program Level Solutions (Semaphores, Monitors)

© DEEDS – OS 2
Deadlocks Starvation
How to allocate a resource to have progress… – Let’s get a task running!!! E.g. shortest job first
Works great for multiple short jobs in a system May cause a long job to be postponed indefinitely with shorter ones jumping ahead
… even though this is “waiting” and not blocked
Alternates?– First-come, first-serve (FIFO) policy, Round Robin Slotting– Shortest job first, highest priority first, earliest deadline first, random …
Resource Allocation: Efficient? Fair? Optimal?
© DEEDS – OS 3
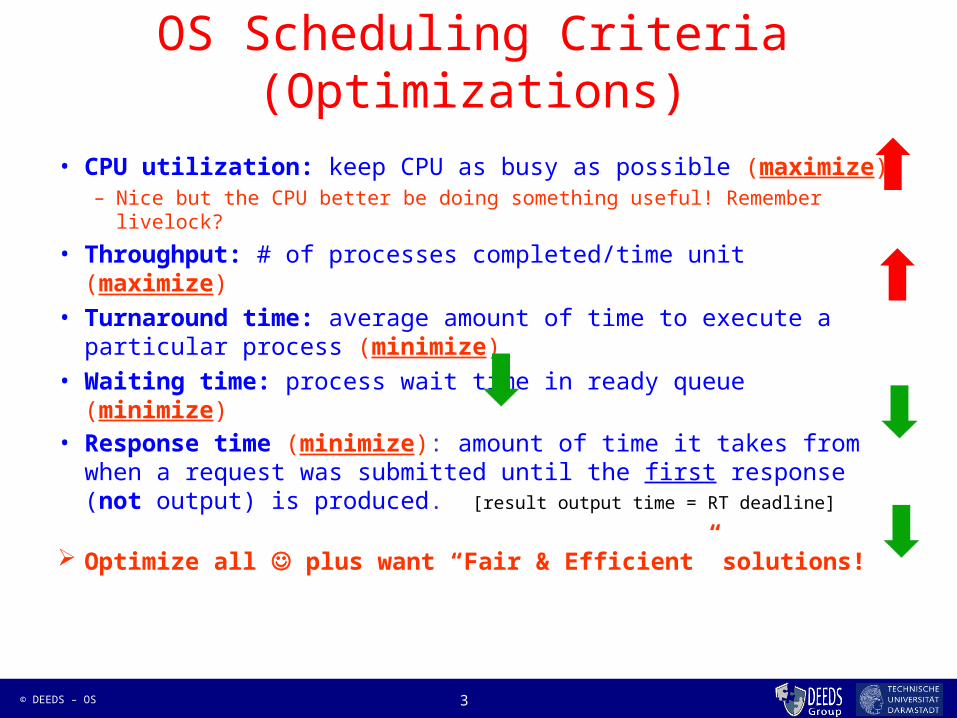
OS Scheduling Criteria (Optimizations)
• CPU utilization: keep CPU as busy as possible (maximize)– Nice but the CPU better be doing something useful! Remember livelock?
• Throughput: # of processes completed/time unit (maximize)
• Turnaround time: average amount of time to execute a particular process (minimize)
• Waiting time: process wait time in ready queue (minimize)• Response time (minimize): amount of time it takes from when
a request was submitted until the first response (not output) is produced. [result output time = RT deadline]
Optimize all plus want “Fair & Efficient” solutions!
© DEEDS – OS 4
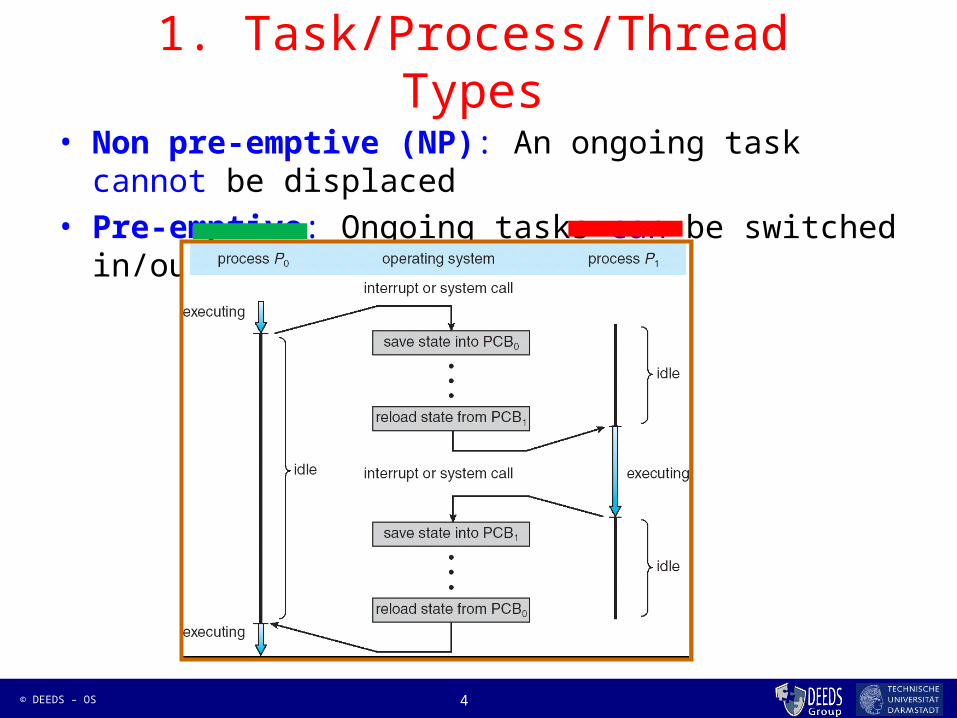
1. Task/Process/Thread Types
• Non pre-emptive (NP): An ongoing task cannot be displaced
• Pre-emptive: Ongoing tasks can be switched in/out as needed
© DEEDS – OS 5
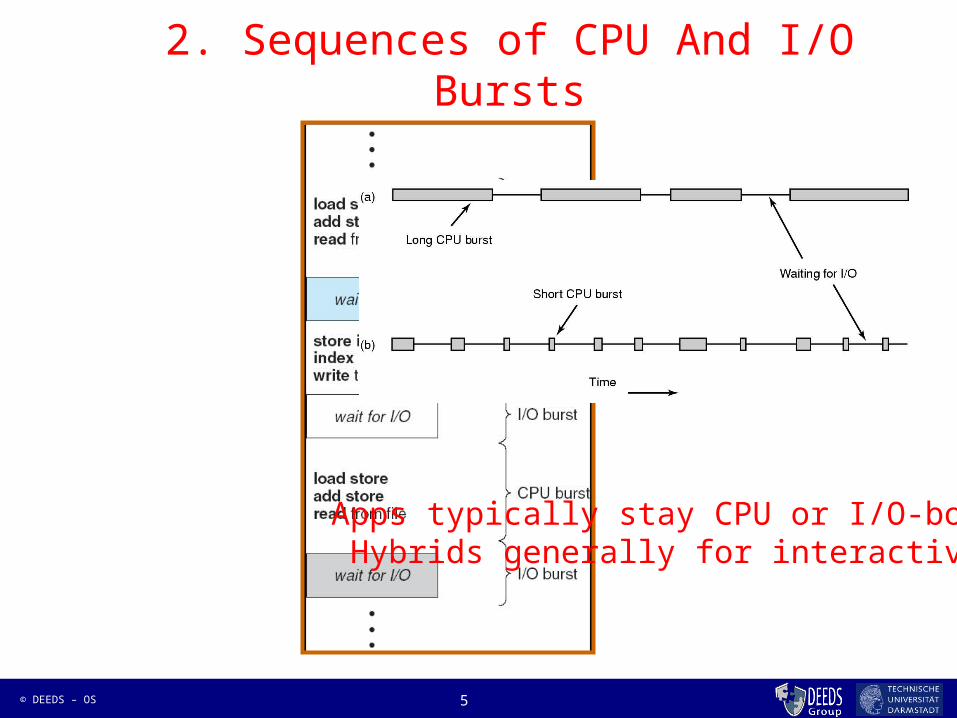
2. Sequences of CPU And I/O Bursts
Apps typically stay CPU or I/O-bound – Hybrids generally for interactive apps
© DEEDS – OS 6
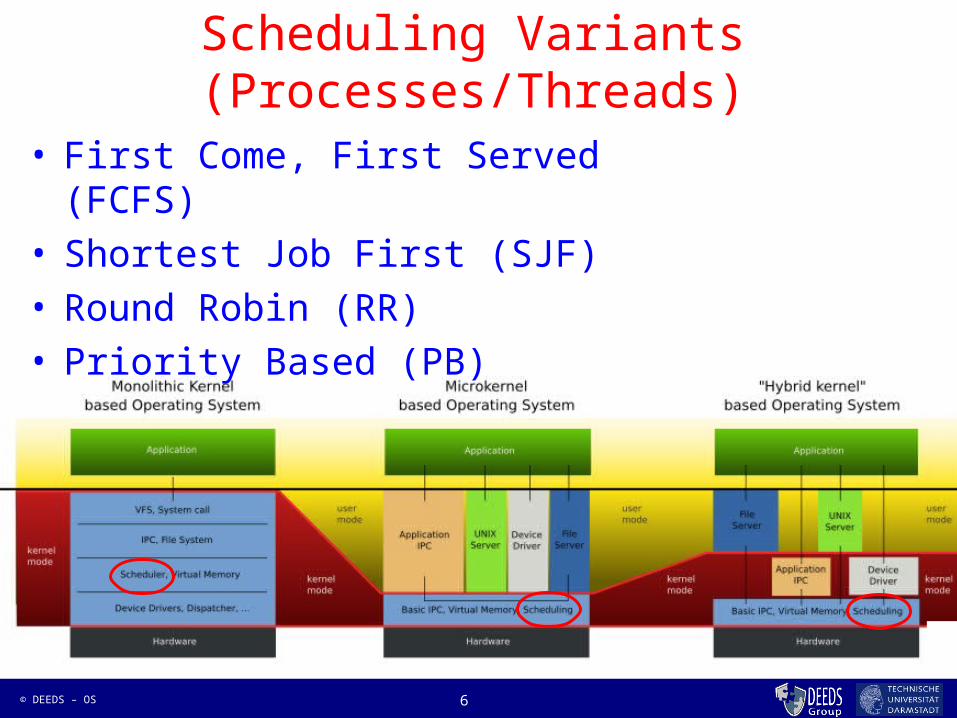
Scheduling Variants (Processes/Threads)
• First Come, First Served (FCFS)• Shortest Job First (SJF)• Round Robin (RR)• Priority Based (PB)
© DEEDS – OS 7
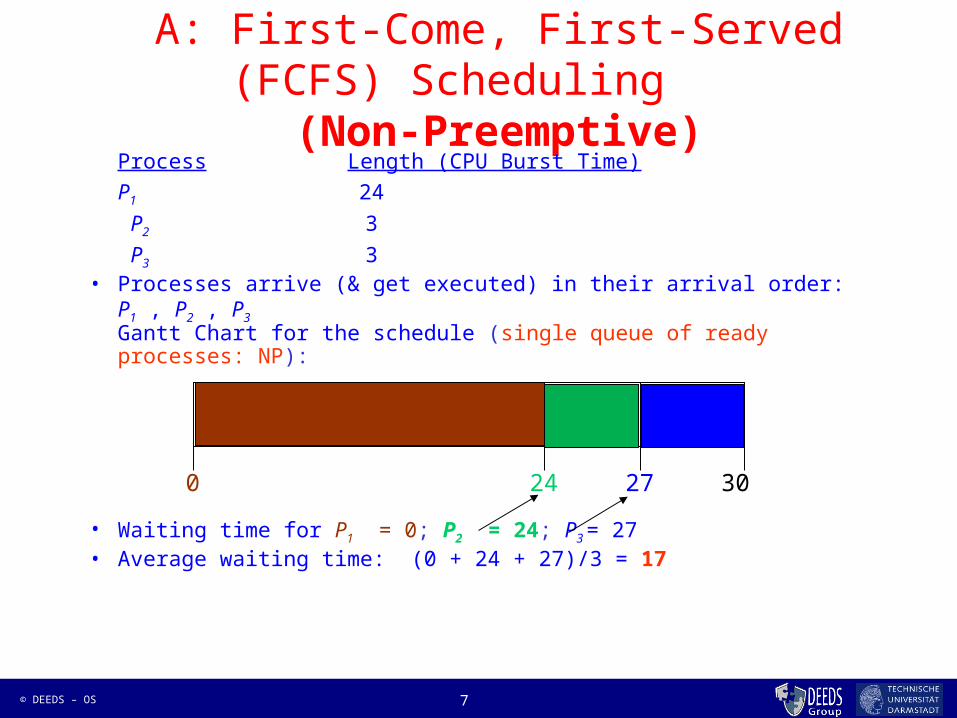
A: First-Come, First-Served (FCFS) Scheduling
(Non-Preemptive)Process Length (CPU Burst Time)
P1 24
P2 3
P3 3
• Processes arrive (& get executed) in their arrival order: P1 , P2 , P3
Gantt Chart for the schedule (single queue of ready processes: NP):
• Waiting time for P1 = 0; P2 = 24; P3 = 27• Average waiting time: (0 + 24 + 27)/3 = 17
P1 P2 P3
24 27 300
© DEEDS – OS 8
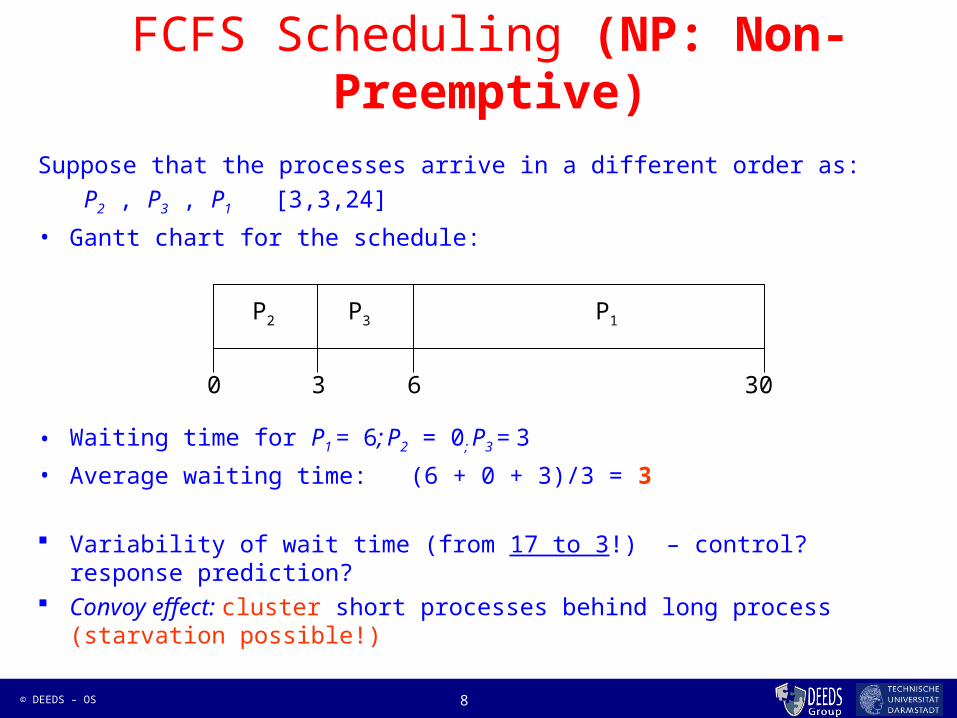
FCFS Scheduling (NP: Non-Preemptive)
Suppose that the processes arrive in a different order as:
P2 , P3 , P1 [3,3,24]
• Gantt chart for the schedule:
• Waiting time for P1 = 6; P2 = 0; P3 = 3
• Average waiting time: (6 + 0 + 3)/3 = 3
Variability of wait time (from 17 to 3!) – control? response prediction? Convoy effect: cluster short processes behind long process (starvation
possible!)
P1P3P2
63 300
© DEEDS – OS 9
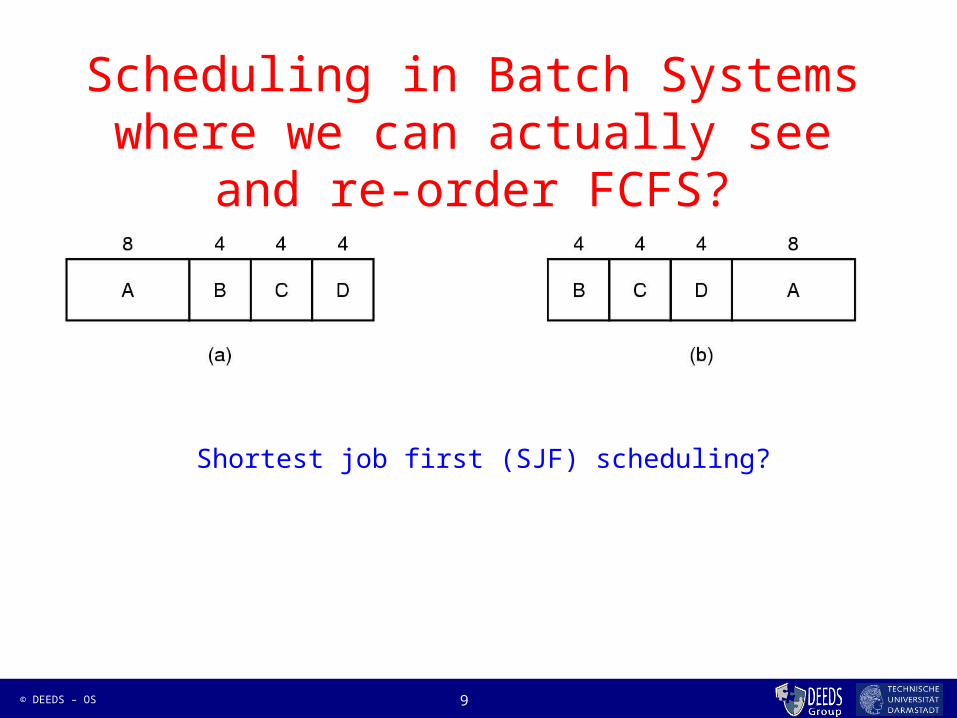
Scheduling in Batch Systems where we can actually see and re-order FCFS?
Shortest job first (SJF) scheduling?
© DEEDS – OS 10
B: Shortest-Job-First (SJF) Scheduling
• Associate with each process the length of its next CPU burst
• Use these lengths to schedule the process with the shortest time
Options: non-preemptive – once CPU given to the process it cannot be preempted
until it completes its CPU burst
– preemptive – if a new process arrives with CPU burst length less than remaining time of current executing process, preempt.
Variation: Shortest-Remaining-Time-First (SRTF)

© DEEDS – OS 11
Process Arrival Time Burst Time
P1 0.00 7
P2 0.0+ 4
P3 0.0+ 1
P4 0.0+ 4
• SJF (non-preemptive) P1, then P3 then P2, P4 (FCFS across equals)
• Average waiting time = (0 + 8 + 7 + 12)/4 = 6.75 (fixed arrival)
• Av. waiting = (0 + [8-2] + [7-4] + [12-5])/4 = 4.00 (staggered arrival)
Example of Non-Preemptive SJF
P1 P3 P2
73 160
P4
8 12
0.0
2.0
4.0
5.0

© DEEDS – OS 12
Shortest-Job-First (SJF) Scheduling
• Associate with each process the length of its next CPU burst
• Use these lengths to schedule the process with the shortest time
Options: – non-preemptive – once CPU given to the process it cannot be preempted
until it completes its CPU burst preemptive – if a new process arrives with CPU burst length less than
remaining time of current executing process, preempt. Variation: Shortest-Remaining-Time-First (SRTF)
© DEEDS – OS 13
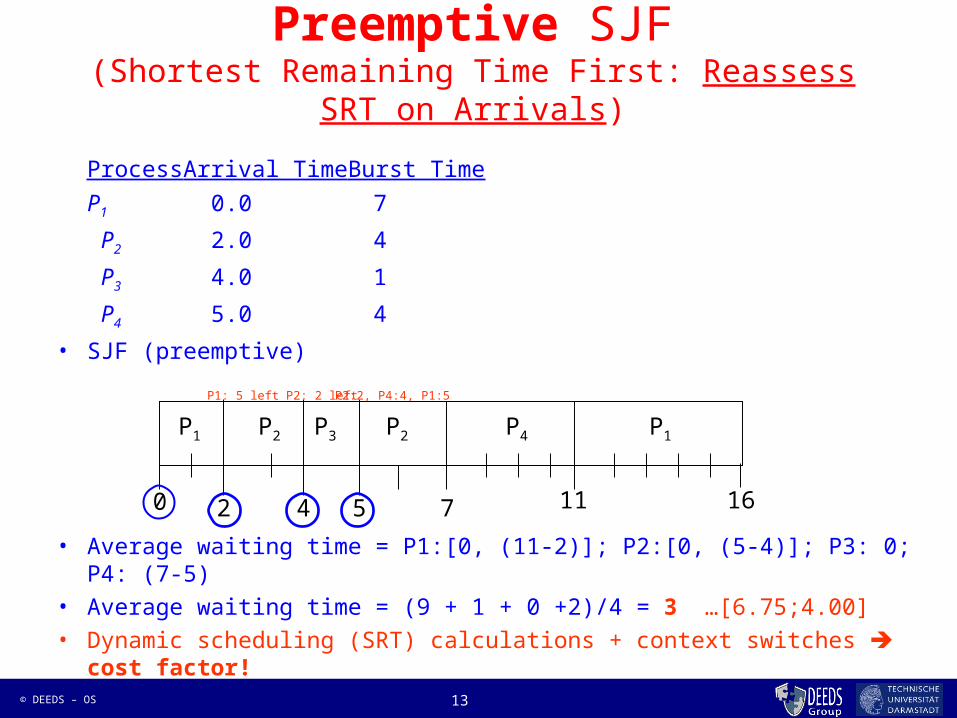
Preemptive SJF(Shortest Remaining Time First: Reassess SRT on Arrivals)
Process Arrival Time Burst Time
P1 0.0 7
P2 2.0 4
P3 4.0 1
P4 5.0 4
• SJF (preemptive)
• Average waiting time = P1:[0, (11-2)]; P2:[0, (5-4)]; P3: 0; P4: (7-5)
• Average waiting time = (9 + 1 + 0 +2)/4 = 3 …[6.75;4.00]
• Dynamic scheduling (SRT) calculations + context switches cost factor!
P1 P3P2
42 110
P4
5 7
P2 P1
16
P1: 5 left P2: 2 left P2:2, P4:4, P1:5
© DEEDS – OS 14
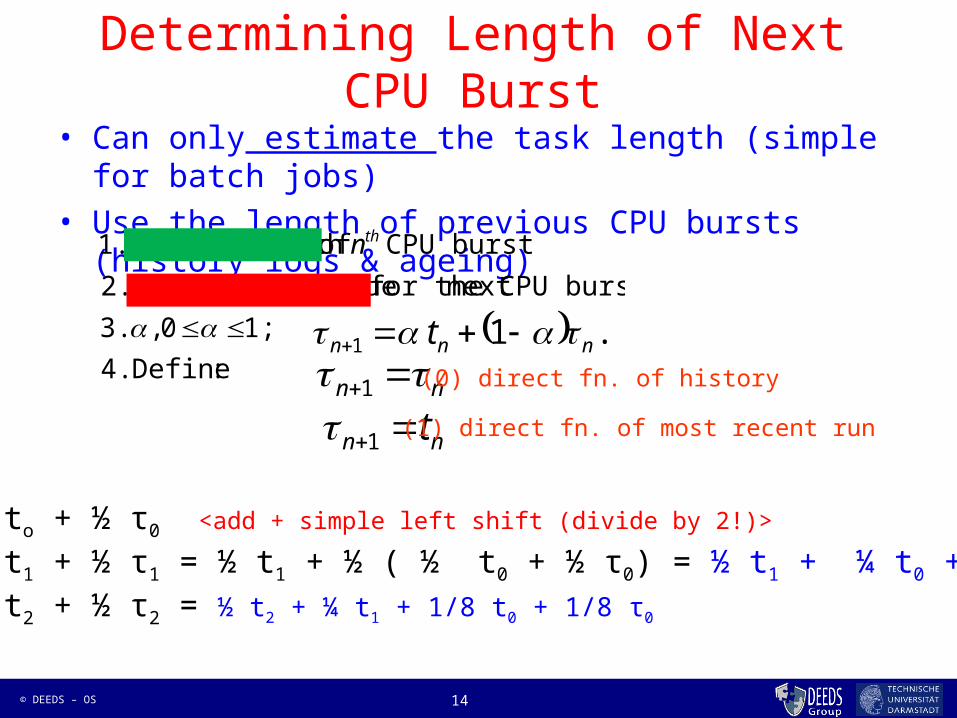
Determining Length of Next CPU Burst
• Can only estimate the task length (simple for batch jobs)
• Use the length of previous CPU bursts (history logs & ageing)
nn 1:Define 4.
1;0 , 3.
burst CPUnext for the valuepredicted 2.
burst CPU oflength actual 1.
1
n
thn nt
.1 1 nnn t
nn t1(0) direct fn. of history
(1) direct fn. of most recent run
τ1 = ½ to + ½ τ0 <add + simple left shift (divide by 2!)>
τ2 = ½ t1 + ½ τ1 = ½ t1 + ½ ( ½ t0 + ½ τ0) = ½ t1 + ¼ t0 + ¼ τ0
τ3 = ½ t2 + ½ τ2 = ½ t2 + ¼ t1 + 1/8 t0 + 1/8 τ0
© DEEDS – OS 15
Shortest-Job-First (SJF) Scheduling
• Associate with each process the length of its next CPU burst
• Use these lengths to schedule the process with the shortest time
Options: – non-preemptive – once CPU given to the process it cannot be preempted until completes
its CPU burst
– preemptive – if a new process arrives with CPU burst length less than remaining time of current executing process, preempt. Shortest-Remaining-Time-First (SRTF)
• SJF is optimal – gives minimum average waiting time for a given set of processes
• SJF can still lead to starvation: if new short jobs keep coming in and getting considered in the “shortest” ranking, a “long” job can potentially starve!
© DEEDS – OS 16
Variations
• SJF EDF (Earliest Deadline First)
© DEEDS – OS 17
Onwards to Preemptive Scheduling
© DEEDS – OS 18
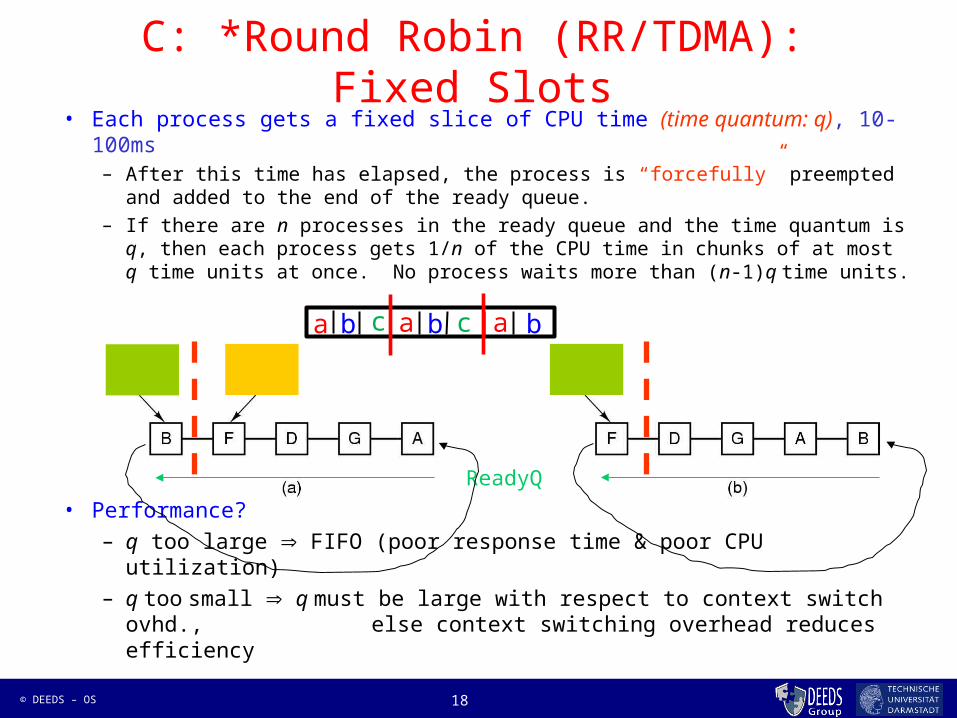
C: *Round Robin (RR/TDMA): Fixed Slots• Each process gets a fixed slice of CPU time (time quantum: q), 10-100ms
– After this time has elapsed, the process is “forcefully” preempted and added to the end of the ready queue.
– If there are n processes in the ready queue and the time quantum is q, then each process gets 1/n of the CPU time in chunks of at most q time units at once. No process waits more than (n-1)q time units.
• Performance?
– q too large FIFO (poor response time & poor CPU utilization)
– q too small q must be large with respect to context switch ovhd., else context switching overhead reduces efficiency
ReadyQ
a a a bbb cc
© DEEDS – OS 19
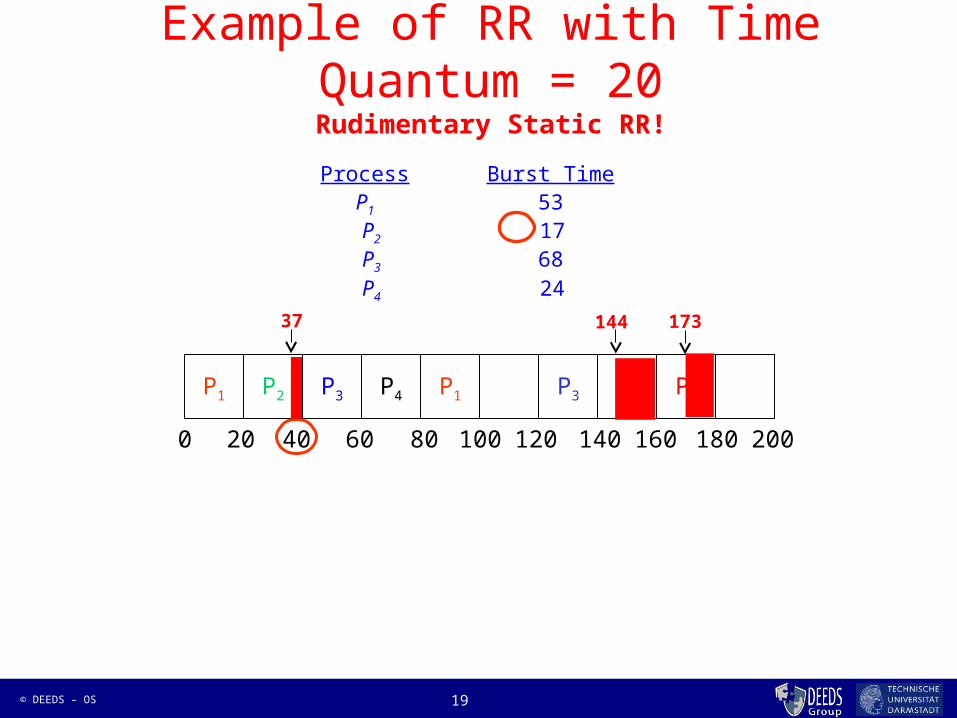
Example of RR with Time Quantum = 20Rudimentary Static RR!
Process Burst TimeP1 53 P2 17 P3 68 P4 24
P1 P2 P3 P4 P1 P3 P4 P1
0 20 40 60 80 100 120 140 160 180 200
37 144 173

© DEEDS – OS 20
Better Dynamic RR with Quantum = 20Dynamic Q: if a process finishes in less than 20, then the next slot starts earlier!
Process Burst TimeP1 53 P2 17 P3 68 P4 24
• Typically, higher average turnaround than SJF, but better response– Turnaround time – amount of time to execute a particular process (minimize)– Response time (min) – amount of time it takes from request submission until first response
• Scheduling is static though calculating/estimation “right” length of quantum is crucial!!!
• Possible to have quanta of varying lengths!!! (dynamic scheduling costs ~ SJF)
P1 P2 P3 P4 P1 P3 P4 P1 P3 P3
0 20 37 57 77 97 117 121 134 154 162
© DEEDS – OS 21
D: *Priority Scheduling (RR All tasks have same priority)
• A priority number (integer) is associated with each process• The CPU is allocated to process with the highest priority
(For Unix BSD: smallest integer highest priority)
– Preemptive (priority and order changes possible at runtime)
– Non-preemptive (initial execution order chosen by static priorities)
SJF is a priority scheduling where priority is the predicted next CPU burst time
• Problem Starvation: low priority processes may never execute
• Solution Aging: as time progresses increase priority of process
© DEEDS – OS 22
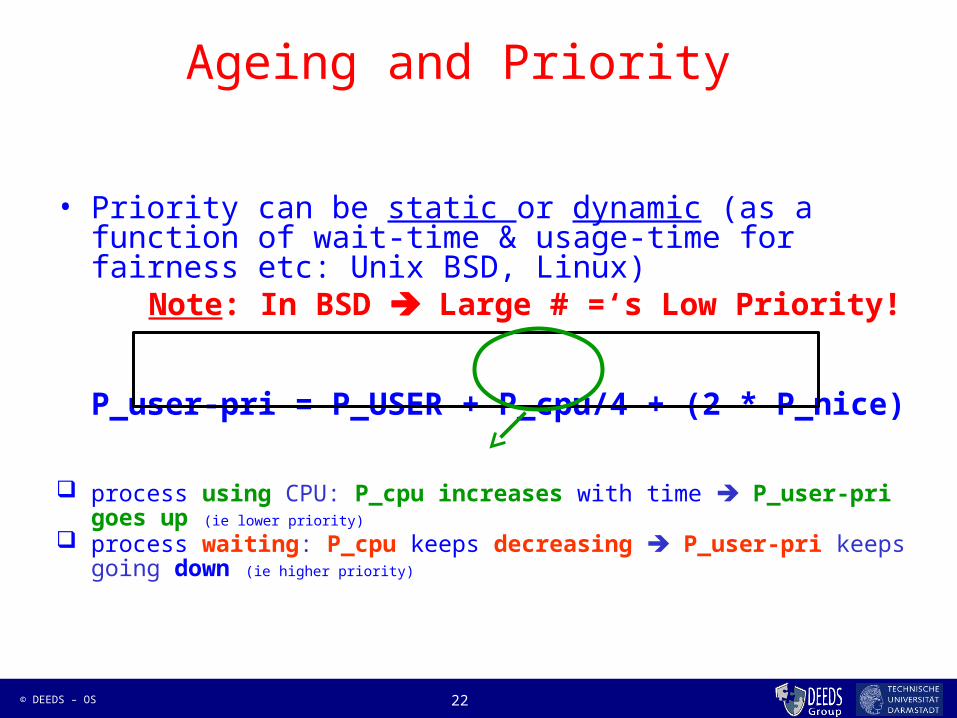
Ageing and Priority
• Priority can be static or dynamic (as a function of wait-time & usage-time for fairness etc: Unix BSD, Linux)
Note: In BSD Large # =‘s Low Priority!
P_user-pri = P_USER + P_cpu/4 + (2 * P_nice)
process using CPU: P_cpu increases with time P_user-pri goes up (ie lower priority)
process waiting: P_cpu keeps decreasing P_user-pri keeps going down (ie higher priority)
© DEEDS – OS 23
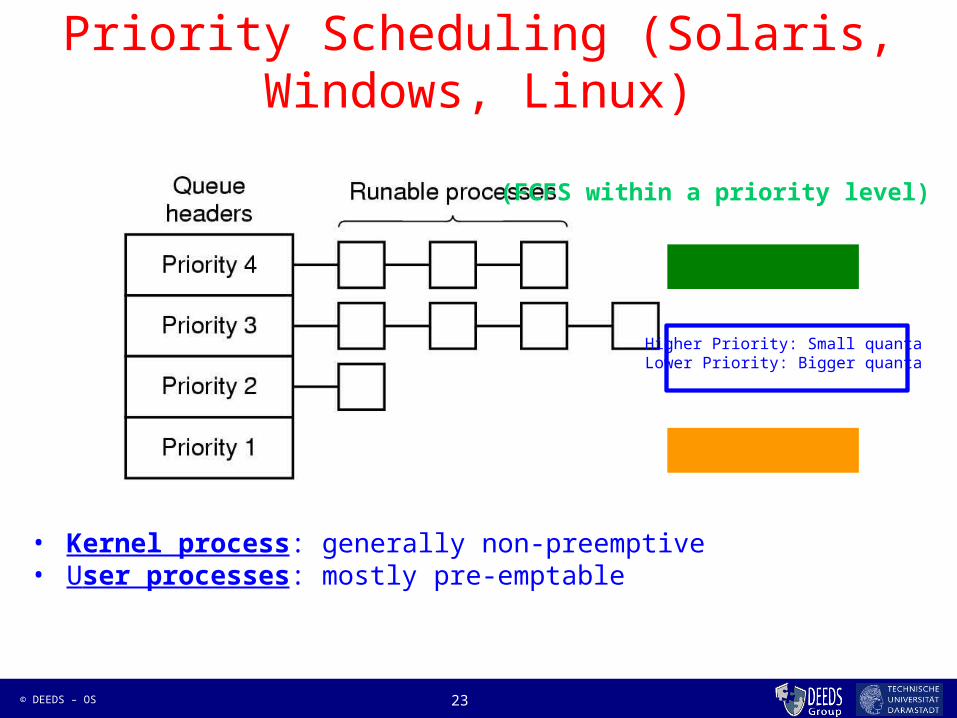
Priority Scheduling (Solaris, Windows, Linux)
• Kernel process: generally non-preemptive • User processes: mostly pre-emptable
(FCFS within a priority level)
Higher Priority: Small quantaLower Priority: Bigger quanta
© DEEDS – OS 24
Which Scheduling Policy to Use?
• OS schedulers implement *all* policies• The nature of specific applications (computing, I/O,
multimedia etc) and the mixture of applications (at kernel- level, at user-level) determines the specific scheduling policy or groups of policies to use!
• Kernel and user-level schedulers can be the same or more generally discrete at each level.
24
© DEEDS – OS 25
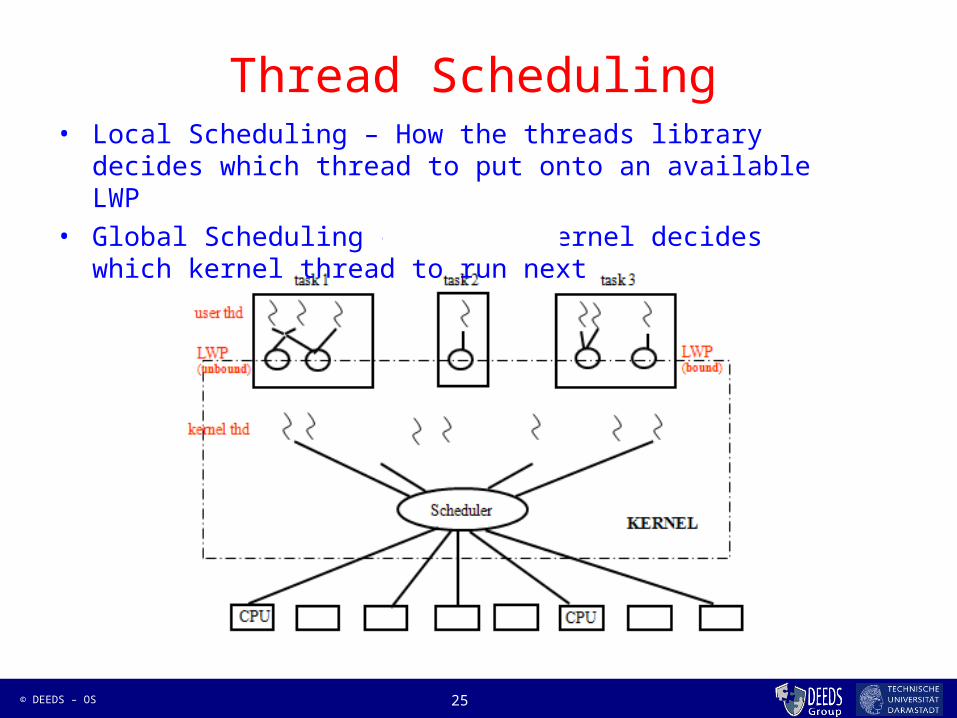
Thread Scheduling• Local Scheduling – How the threads library decides which thread to
put onto an available LWP
• Global Scheduling – How the kernel decides which kernel thread to run next
© DEEDS – OS 26
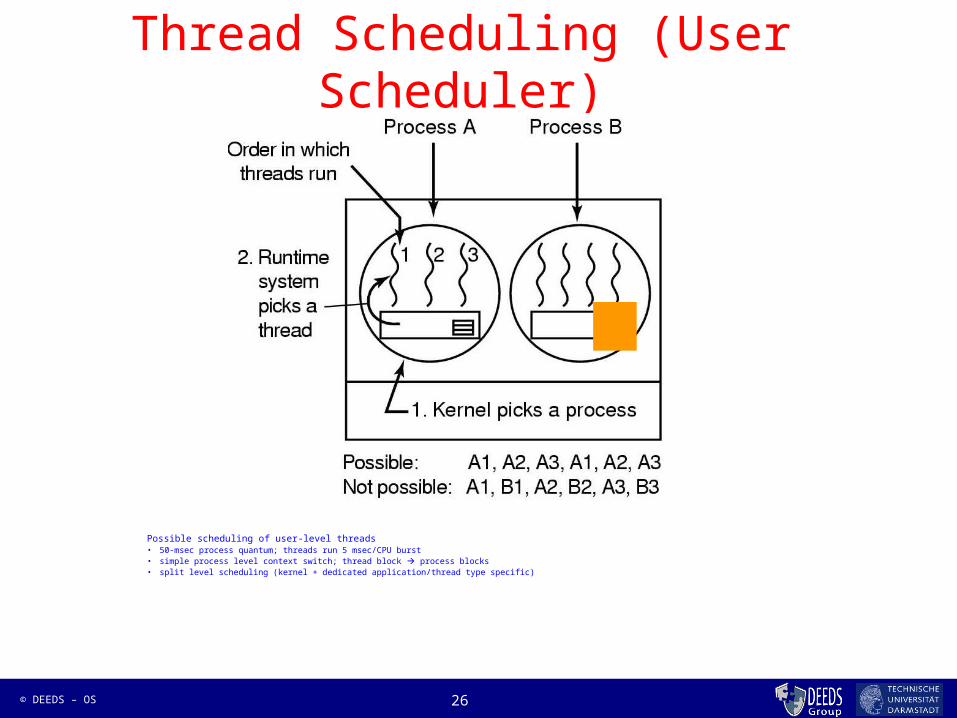
Thread Scheduling (User Scheduler)
Possible scheduling of user-level threads• 50-msec process quantum; threads run 5 msec/CPU burst• simple process level context switch; thread block process blocks• split level scheduling (kernel + dedicated application/thread type specific)
© DEEDS – OS 27
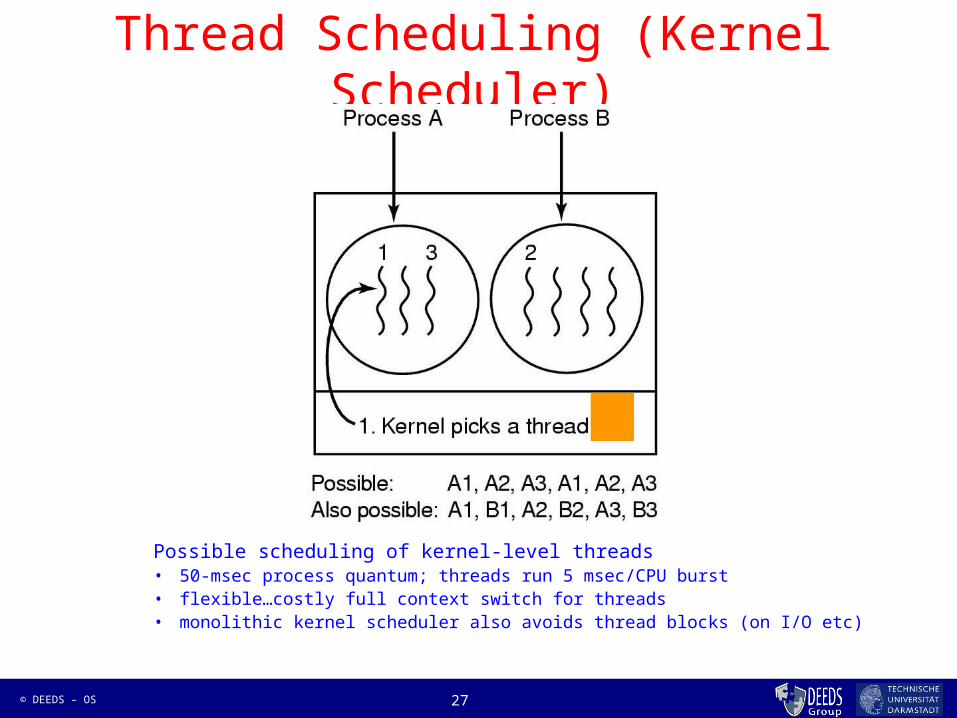
Thread Scheduling (Kernel Scheduler)
Possible scheduling of kernel-level threads• 50-msec process quantum; threads run 5 msec/CPU burst• flexible…costly full context switch for threads• monolithic kernel scheduler also avoids thread blocks (on I/O etc)
© DEEDS – OS 28
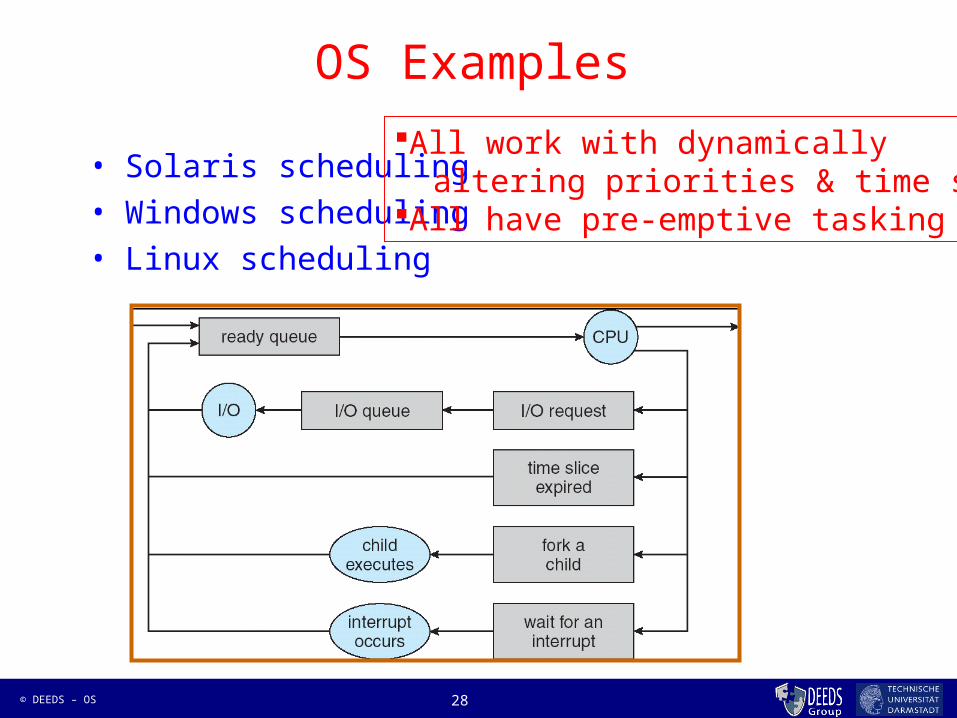
OS Examples
• Solaris scheduling
• Windows scheduling
• Linux scheduling
All work with dynamically altering priorities & time slicesAll have pre-emptive tasking
© DEEDS – OS 29
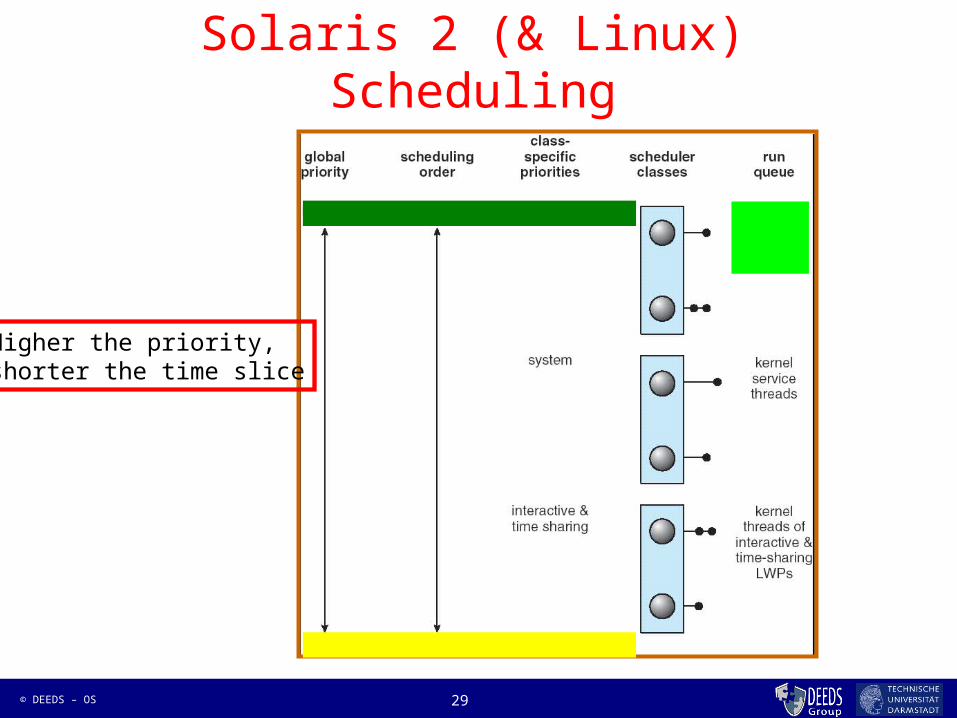
Solaris 2 (& Linux) Scheduling
Higher the priority,shorter the time slice

© DEEDS – OS 30
Solaris Dispatch Table
* Lowest priority 0 (diff. from BSD) is given largest quantum TQE: new (reduced) priority for tasks that have used quanta without blocking (CPU Intensive Tasks) ; Solaris 9+ : No TQE (fixed priority & CPU shares) RFS: (raised) priority of awakened tasks (responsiveness for I/O Tasks)
TQE RFS
(msec)
New dynamically altered priorities…and time slots
CPU-tasks mid-priority,Interactive: higher priority
© DEEDS – OS 31
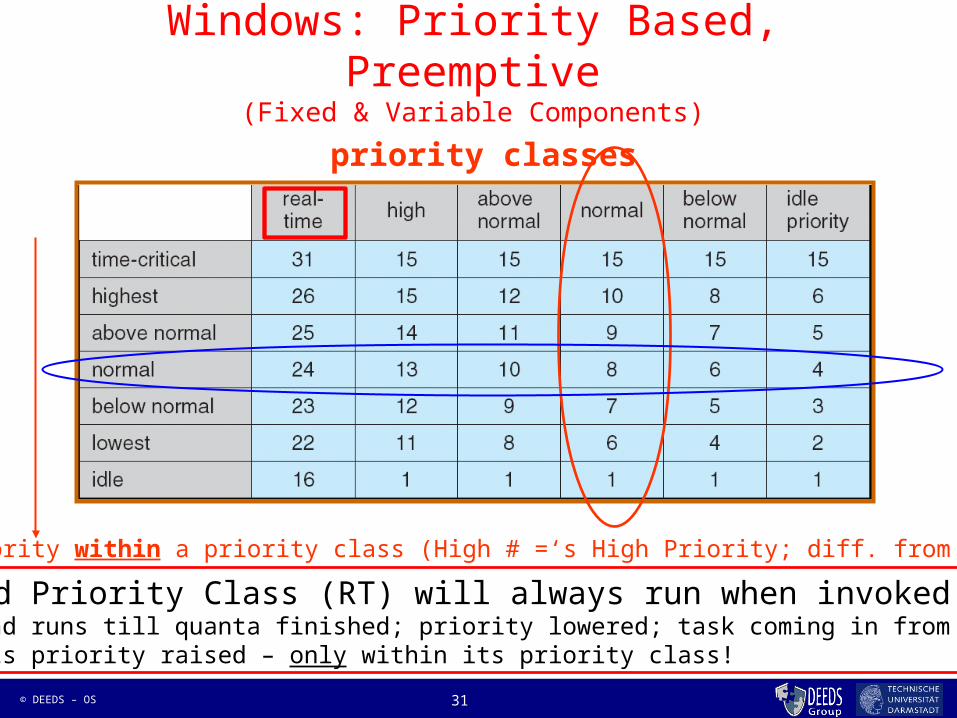
Windows: Priority Based, Preemptive(Fixed & Variable Components)
priority classes
relative priority within a priority class (High # =‘s High Priority; diff. from BSD)
Fixed Priority Class (RT) will always run when invoked-Thread runs till quanta finished; priority lowered; task coming in from “wait” gets priority raised – only within its priority class!

© DEEDS – OS 32
Linux Scheduling (0=highest)
Two algorithms: time-sharing and real-time• Time-sharing
– Prioritized credit-based – process with most credits is scheduled next
– Credit subtracted when timer interrupt occurs– When credit = 0, another process chosen– When all processes have credit = 0, re-crediting occurs
• Based on factors including priority and history
• Real-time– Soft real-time– Two classes
• FCFS and RR• Highest priority process always runs first