Outreach - University of California, BerkeleyAutopilot for an Ultra-Light, Flying Wing Nashlie...
16
Chess Review October 4, 2006 Alexandria, VA Edited and presented by Outreach Jonathan Sprinkle UC Berkeley
Transcript of Outreach - University of California, BerkeleyAutopilot for an Ultra-Light, Flying Wing Nashlie...

Chess ReviewOctober 4, 2006Alexandria, VA
Edited and presented by
Outreach
Jonathan SprinkleUC Berkeley

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 2
Overview
• Summer Programs– SUPERB: Summer Undergraduate Program in
Engineering Research at Berkeley
– SIPHER: Summer Internship Program in Hybrid and Embedded Software Research
• Previous Summer Students (Updates)• Professional Outreach: HCSS meetings
Univer sit y of Cal i f or n ia

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 3
SUPERB 2006
• Sponsored four undergraduate students• Paired with four individual mentors• Projects reinforce CHESS Goals
CHESS-sponsored participants in the SUPERB Program.L-R (Front, Mentors) Alexandr Kurzhanskiy, Elaine Cheong, Saurabh Amin, Todd Templeton
L-R (Rear, Student Researchers) Dominique Duncan, Heather Taylor, Nandita Mitra, Nashlie Sephus
http://chess.eecs.berkeley.edu/superb/

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 4
SUPERB: Projects Overview
Highway Traffic Flow Analysis and Control Stochastic Hybrid Systems
Wireless Sensor NetworksAvionics Embedded Software
Dominique Duncan, University of Chicago
ρc
QM
Q(ρ)
ρJ
ρ
v -w
0
CTM (Cell-Transmission Model) Equation
v : free-flow speed (mph)w : backward congestion wave speed (mph)QM: maximum allowable flow (vph)ρJ : jam density (vpm)ρc: critical density (vpm)
Fundamental Diagram
ppNandita Mitra, Rutgers University
Nashlie Sephus, Mississippi State University
ON1OFF
ON 2
Action 1: No Action
OFF
ON 2
OFF ON1
ON 2
ON 1OFF
ON 2ON 2
Action 2 Action 3
Action 4 Action 5 Action 6
0.8
0.8
0.8
0.8
0.8
Action 7
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
d-c-1 d c ON(2)n -m-1n m ON(1)b-a-1 b a OFF
ON(2) ON(1) OFF
Typical Transition Matrix
ON 1
ON1OFF
ON 2
ON1OFF
ON 2
0.8
0.1
0.1 1
1
0.10.1
1
1
0.1
0.11
1
0.10.1
1
1
ON1OFF
0.1
1 1
0.1
1 1
0.10.1
1
1
1ON1OFF
ON 2
Action 1: No Action
OFF
ON 2
OFF ON1
ON 2
ON 1OFF
ON 2ON 2
Action 2 Action 3
Action 4 Action 5 Action 6
0.8
0.8
0.8
0.8
0.8
Action 7
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
d-c-1 d c ON(2)n -m-1n m ON(1)b-a-1 b a OFF
ON(2) ON(1) OFF
Typical Transition Matrix
ON 1
ON1OFF
ON 2
ON1OFF
ON 2
0.8
0.1
0.1 1
1
0.10.1
1
1
0.1
0.11
1
0.10.1
1
1
ON1OFF
0.1
1 1
0.1
1 1
0.10.1
1
1
1ON1OFF
ON 2
Action 1: No Action
OFF
ON 2
OFF ON1
ON 2
ON 1OFF
ON 2ON 2
Action 2 Action 3
Action 4 Action 5 Action 6
0.8
0.8
0.8
0.8
0.8
Action 7
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
d-c-1 d c ON(2)n -m-1n m ON(1)b-a-1 b a OFF
ON(2) ON(1) OFF
Typical Transition Matrix
ON 1
ON1OFF
ON 2
ON1OFF
ON 2
0.8
0.1
0.1 1
1
0.10.1
1
1
0.1
0.11
1
0.10.1
1
1
ON1OFF
0.1
1 1
0.1
1 1
0.10.1
1
1
1
Heather Taylor, University of Vermont

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 5
Highway Traffic Flow Analysis and Control
Dominique’s Mentor, Alex Kurzhanskiy
I-210 westbound in Pasadena, CA
Recursion equation where # cars in cell at time k+1 = # cars at time k plus inflow minus outflow
Dominique Duncan, University of Chicago, Junior, Mathematics

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 6
Tool for probabilistic safety verification of stochastic hybrid systems
Nandita MitraRutgers UniversityJunior, Electrical Engineering
ON1OFF
ON 2
Action 1: No Action
OFF
ON 2
OFF ON1
ON 2
ON 1OFF
ON 2ON 2
Action 2 Action 3
Action 4 Action 5 Action 6
0.8
0.8
0.8
0.8
0.8
Action 7
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
d-c-1 d c ON(2)n -m-1n m ON(1)b-a-1 b a OFF
ON(2) ON(1) OFF
Typical Transition Matrix
ON 1
ON1OFF
ON 2
ON1OFF
ON 2
0.8
0.1
0.1 1
1
0.10.1
1
1
0.1
0.11
1
0.10.1
1
1
ON1OFF
0.1
1 1
0.1
1 1
0.10.1
1
1
1ON1OFF
ON 2
Action 1: No Action
OFF
ON 2
OFF ON1
ON 2
ON 1OFF
ON 2ON 2
Action 2 Action 3
Action 4 Action 5 Action 6
0.8
0.8
0.8
0.8
0.8
Action 7
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
d-c-1 d c ON(2)n -m-1n m ON(1)b-a-1 b a OFF
ON(2) ON(1) OFF
Typical Transition Matrix
ON 1
ON1OFF
ON 2
ON1OFF
ON 2
0.8
0.1
0.1 1
1
0.10.1
1
1
0.1
0.11
1
0.10.1
1
1
ON1OFF
0.1
1 1
0.1
1 1
0.10.1
1
1
1ON1OFF
ON 2
Action 1: No Action
OFF
ON 2
OFF ON1
ON 2
ON 1OFF
ON 2ON 2
Action 2 Action 3
Action 4 Action 5 Action 6
0.8
0.8
0.8
0.8
0.8
Action 7
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
d-c-1 d c ON(2)n -m-1n m ON(1)b-a-1 b a OFF
ON(2) ON(1) OFF
Typical Transition Matrix
ON 1
ON1OFF
ON 2
ON1OFF
ON 2
0.8
0.1
0.1 1
1
0.10.1
1
1
0.1
0.11
1
0.10.1
1
1
ON1OFF
0.1
1 1
0.1
1 1
0.10.1
1
1
1
SHS modelTwo continuous states; Three modes: OFF, ON (R1), ON (R2); Continuous evolution in mode ON (R1)
Optimal actions for 149th
minute and three modes
Nandita’s Mentors, Alex Abate (L) and Saurabh Amin (R) continuethis research, and have a poster today explaining theory/results.

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 7
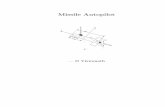
Default (L) and Optimized (R) Autopilots
Autopilot for an Ultra-Light, Flying Wing
Nashlie Sephus, Mississippi State Univ., Junior, Computer Engineering
Autopilot
Zagi
Ground Station
MATLAB 7.1.lnk
C-programming
language
Optimization
Simulator
Nashlie’s Mentor, Todd Templeton, continued the work throughthe summer and early fall, to fold in many optimizations to theopen-source platform providers (Crossbow)

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 8
Multihop Routing Simulation of TinyOS-Based Wireless Sensor Networks in Viptos
Heather Taylor, University of Vermont, Junior, Electrical & Computer Engineering
Heather’s Mentor, Elaine Cheong, is the developer of the Viptos package,and has added Heather’s code to the production tree for Ptolemy, and Viptos.

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 9
SIPHER
• Sponsored eight undergraduate students• Paired with graduate mentors• Projects reinforce ISIS Goals
ISIS-sponsored participants in the SIPHER Program.L-R (Front) Javier Lara, Ethan Jackson, Thao Nguyen, Sandeep Neema, Jessica Kane, Emily Sherrill
L-R (Middle) Brian Williams, Blake Sheridan, Paul Henderson, Darren White, John Koo, Nathan Allotey, Daniel BalasubramanianL-R (Rear) Jan Werner, Gabor Karsai, Gautam Biswas, Brian Turnbull
http://fountain.isis.vanderbilt.edu/teaching/2006-sipher

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 10
SIPHER: Projects Overview
Robotic Cars
Following Optical Waypoints
Exploration and Discovery
Hybrid Systems
Controller Design
Javier LaraMiss. State
Darren WhiteBowie State
Daniel LimbrickTexas A&M
Emily SherrillTTU Thao Nguyen
WKU
Jessica KaneVanderbilt
Nathan AlloteyBaylor
Brian TurnbullVanderbilt

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 11
Control Logic
Controlling Robots: Long distance, straightControlling Robots: Long distance, straight--line navigation of line navigation of an unreliable robot with optical waypointsan unreliable robot with optical waypoints
Lego Mindstorm Platform
Darren Lamison-WhiteBowie State UniversitySophmore, CS
Mentors: Ethan Jackson, Ryan Thibodeaux
Optical Waypoint
Javier LaraMississippi State Univ.Senior, Computer Engg.

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 12
Exploring with LEGO Robots
AlgorithmsExploreGo To Point
Track Position
Simulation
Results
Mentor Daniel Balasubramanianis a graduate of the SIPHER program.
Emily SherrillTennessee Tech, CS
Daniel LimbrickTexas A&M, Senior, EE

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 13
Deployment structure
Model-Based Autonomous Car Controller Design
Results (Figure-8 Trajectory)
Steering Control Law
System design in Simulink during design time and for automatic C-code generation and distribution onto real-time QNX computational nodes
Results include Figure 8, Straight Line, Conter-clockwise circle, and Racetrack Trajectories.
Thao NguyenWestern KY Univ.CS & CIS
Mentors:Graham Hemingway and Peter Humke
Jessica KaneVanderbilt, EE

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 14
Strategy:• Testbed Use• Data Collection• Modeling/Validation• Limited Lookahead
Control Strategy• Fault Diagnosis
Fault Diagnosis Example
Brian TurnbullVanderbiltSenior, ECE
Mentor, Jian Wu, has been working in hybridsystems research whileat Vanderbilt University.
Hybrid System Modeling, Control, and Fault Diagnosis
• Hybrid system consisting of three tanks.
• Eight valves control filling, draining, and transferring betweenthe three tanks.
• A variable speed pump can fill tanks one and two.
Nathan AlloteyBaylor UniversityJunior, ECE

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 15
SUPERB and SIPHER Alumni Report
• SUPERB
• SIPHERYear #
Students# in Grad School
Considering grad school
2003 10 2 22004 9 2 42005 8 2 42006 10 (n/a) 4
Year # Students
# in Grad School
Considering grad school
2003 6 - -2004 3 2 12005 6 2 32006 4 (n/a) 4

ITR Review, Oct. 4, 2006"Outreach", J. Sprinkle 16
Outreach: HCSS
• National Workshop on Aviation Software Systems: Design for Certifiably Dependable Systems
– October 5 & 6, 2006, Alexandria, VA– Organized with
• Claire Tomlin (UC Berkeley/Stanford), R. John Hansman (MIT), Jonathan Sprinkle (UC Berkeley)
• Current state of the art, key issues & needs, promising research approaches, educational needs & approaches
• Beyond SCADA: Networked Embedded Control for Cyber Physical Systems
– November 8 & 9, 2006, Pittsburgh, PA– Organized with
• Helen Gill (NSF) Marija Ilic (CMU), Bruce Krogh (CMU), Brad Martin (NSA), and Shankar Sastry (UC Berkeley)