Schaum's Outline of Calculus, 5th ed. (Schaum's Outline Series)
Upload
marny-mccoyCategory
view
21download
2description

Outline
• Deep Space One and Remote Agent• Model-based Execution• OpSat and the ITMS• Model-based Reactive Planning• Space Robotics

Modes Controlled Through Interactions
drivercomputer buscontrol
remoteterminal
driverremote
terminal
How do we open a valve?

Modes Controlled Through Interactions
drivercomputer buscontrol
remoteterminal
driverremote
terminal
MRMI
Command
Configuration goals
Model
goal statecurrent state
ReactivePlanner

computer buscontrol
remoteterminal
remoteterminal
driver
driver
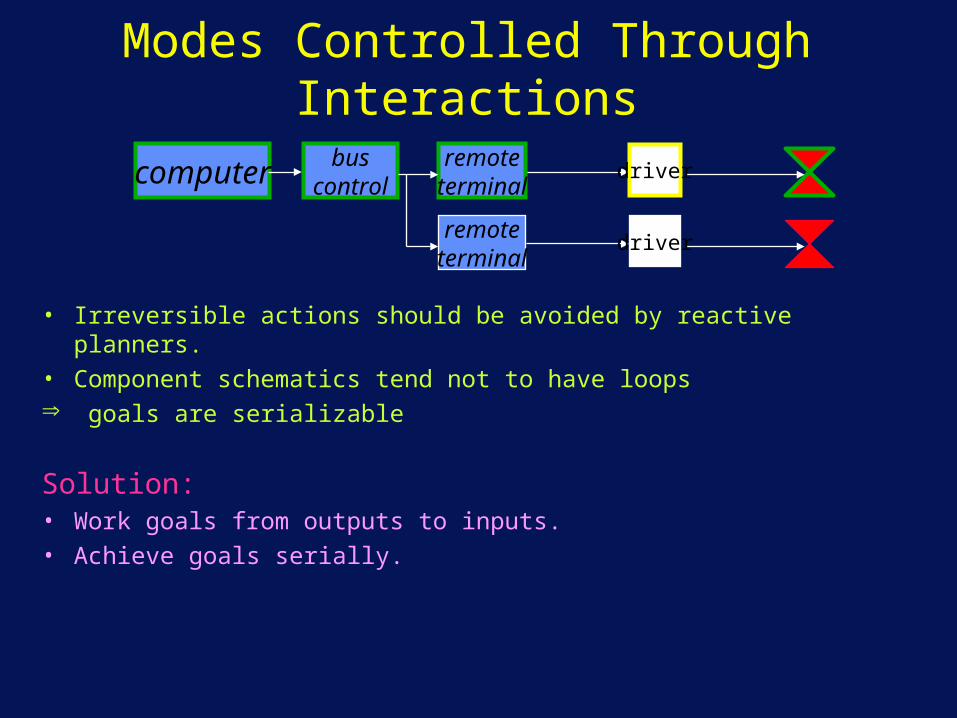
Modes Controlled Through Interactions
• Irreversible actions should be avoided by reactive planners.
• Component schematics tend not to have loops goals are serializable
Solution:• Work goals from outputs to inputs.
• Achieve goals serially.

computer buscontrol
remoteterminal
remoteterminal
driver
driver
Modes Controlled Through Interactions
• Irreversible actions should be avoided by reactive planners.
• Component schematics tend not to have loops goals are serializable
Solution:• Work goals from outputs to inputs.
• Achieve goals serially.
computer buscontrol
remoteterminal
remoteterminal
driver
driver
Modes Controlled Through Interactions
• Irreversible actions should be avoided by reactive planners.
• Component schematics tend not to have loops goals are serializable
Solution:• Work goals from outputs to inputs.
• Achieve goals serially.
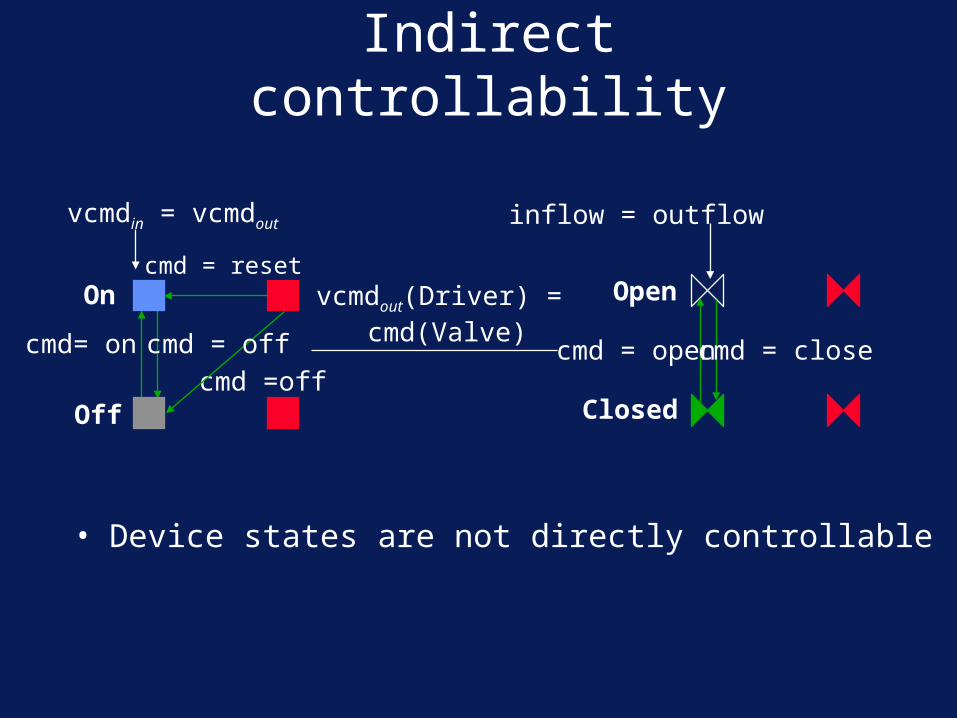
Indirect controllability
inflow = outflow
Closed
Open
cmd = open cmd = closecmd =off
On
Off
cmd= on cmd = off
cmd = reset
vcmdin = vcmdout
vcmdout(Driver) = cmd(Valve)
• Device states are not directly controllable

Compilation
driver = oncmd= open
driver = oncmd = close
inflow = outflow
Closed
Open
cmd =off
On
Off
cmd= on cmd = off
cmd= reset
vcmdin = vcmdout
vcmdout(Driver) = cmd(Valve)
• Remove intermediate variables using implicate generation
– becomes a STRIPS-like problem
– implicate generation done using conflict directed best first search
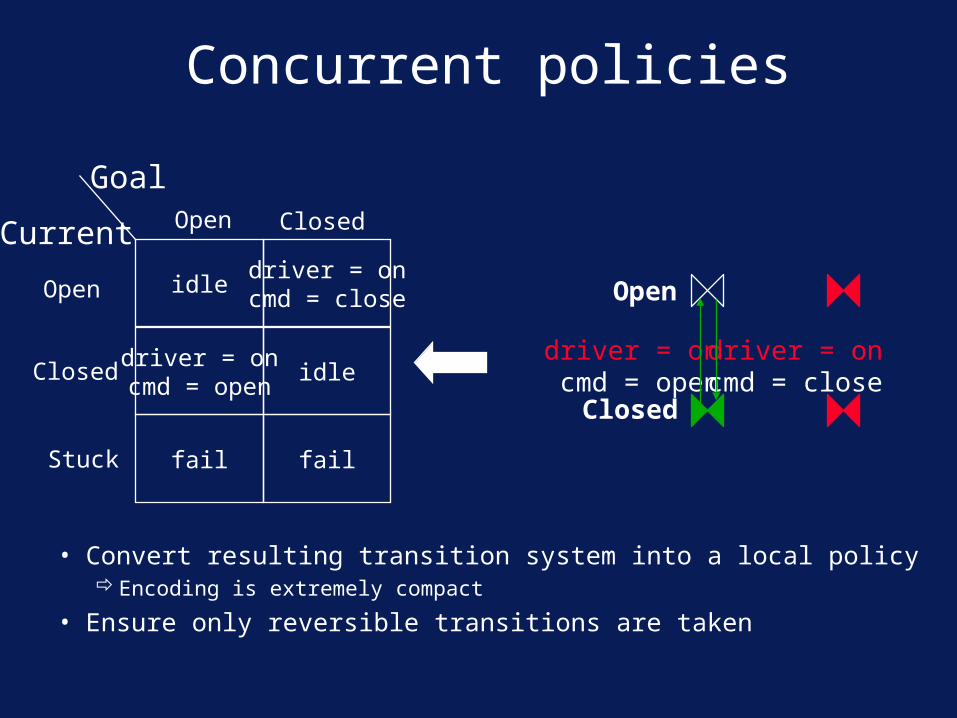
Concurrent policies
driver = on
cmd = opendriver = oncmd = close
Closed
Open
fail
Goal
fail
driver = oncmd = open
idle
idledriver = oncmd = close
Current
Open
Closed
Stuck
Open Closed
• Convert resulting transition system into a local policyEncoding is extremely compact
• Ensure only reversible transitions are taken

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
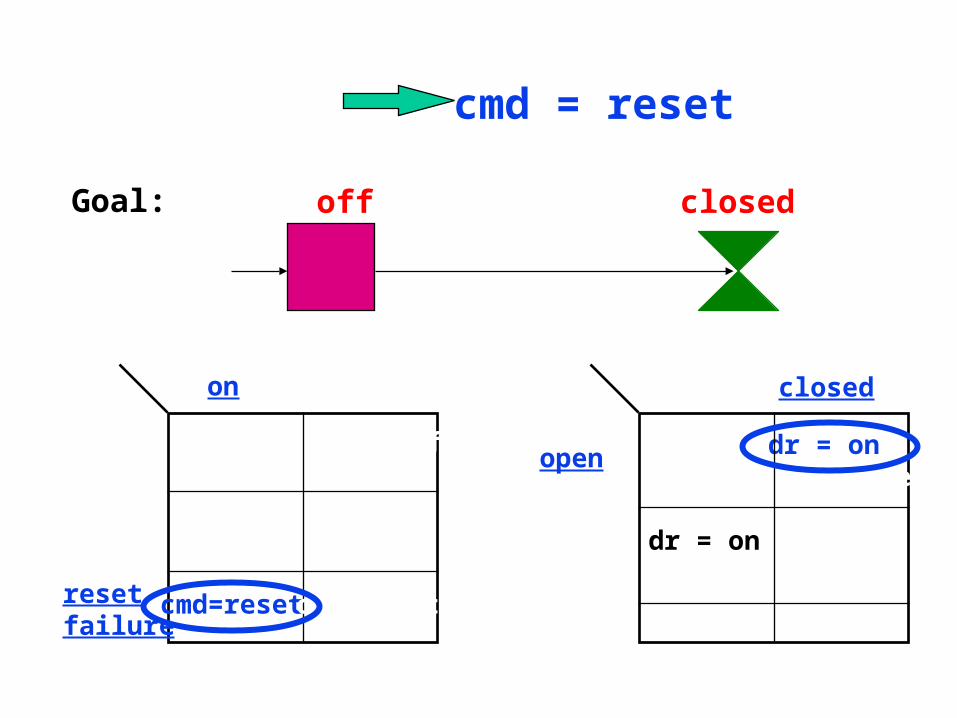
off
Cmd
closedGoal:

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
cmd = on

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
cmd = on

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
cmd = close

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
Driver Fails!cmd = close
Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
cmd = reset

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
cmd = close

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
cmd = off

Goal
Currentopen closed
open
closed
stuck fail fail
idle
idledr = oncmd=open
dr = oncmd=close
GoalCurrent on off
on
off
resetfailure
cmd=reset
idle
idlecmd = on
cmd = off
cmd=reset
off
Cmd
closedGoal:
Success!cmd = off
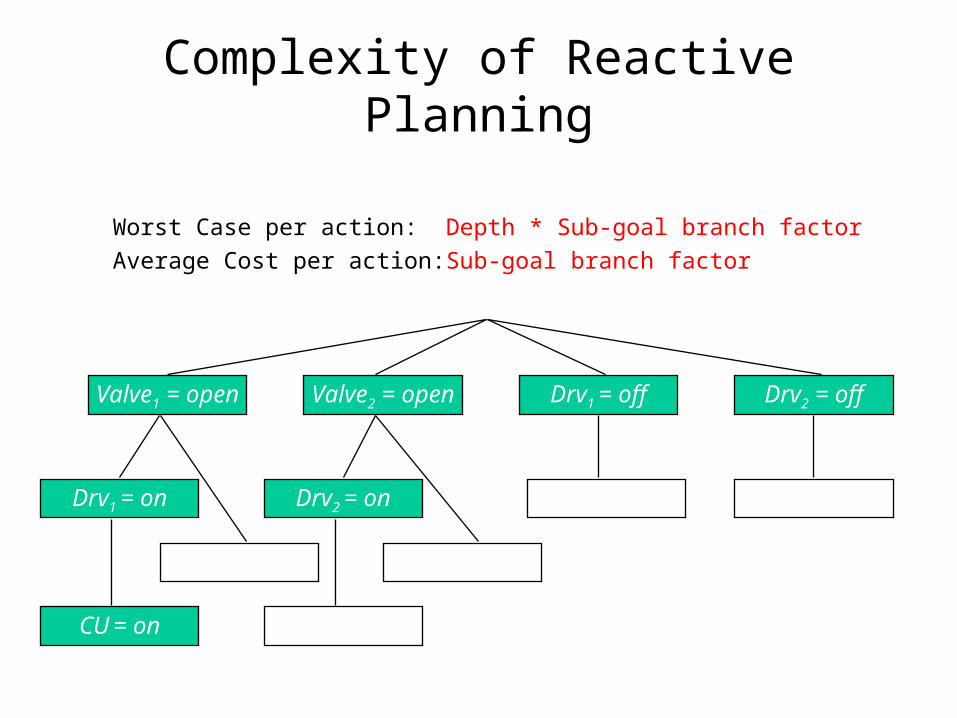
Complexity of Reactive Planning
• Worst Case per action: Depth * Sub-goal branch factor
• Average Cost per action: Sub-goal branch factor
Valve1 = open Valve2 = open Drv1 = off Drv2 = off
Drv1 = on
CU = on
CU = on
Drv2 = on
CU = on
CU = on
CU = on CU = on

Complexity Analysis Details
• Average Cost per action: Subgoal branch factor– Avg cost = compute time / plan length
– Each edge of the goal/subgoal tree is traversed twice.Compute time = 2 * E * B.
– Each node of the goal / subgoal tree generates one action.plan length = N
– Avg cost = O(E/N)
– In the worst case E < = 2 * N.
– Average Cost per action = O(B* N/N) = O(B)
Subgoals

Outline
• Deep Space One and Remote Agent• Model-based Execution• OpSat and the ITMS• Model-based Reactive Planning• Space Robotics

Current Livingstone Testbeds

QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
TechSat21 &Gflops TestbedMIT SSL
Spheres MIT SSL
PortableSatellite Assistant Ames

Conclusions
• Space is opening its doorway to a new generation of agile, highly independent explorers.
• To survive decades of operation they must orchestrate complex regulatory and immune
systems.
• Model-based autonomy supports rapid prototyping through model-based programming
and executives.
• A model-based executive is a kind of stochastic optimal controller that makes extensive
use of deduction to observe and control on the fly.
• The core is OPSAT, a real-time, combinatorial optimization algorithm with logical
feasibility constraints.
• Fast, model-based reactive planning is achieved through knowledge compilation and by
exploiting structural and safety constraints.


![Outline Product Liability Riina Spr2009 Outline[1]](https://static.fdocuments.in/doc/165x107/54fbf0ed4a795937538b4ab9/outline-product-liability-riina-spr2009-outline1.jpg)