Ordinary Differential Equationshomepages.math.uic.edu/~jan/mcs507f12/solvingodes.pdf · Jan...
38
Ordinary Differential Equations 1 An Oscillating Pendulum applying the forward Euler method using odeint in odepack of scipy.integrate 2 Celestial Mechanics simulating the n-body problem using odeint in odepack of scipy.integrate 3 The Tractrix Problem setting up the differential equations using odeint in odepack of scipy.integrate MCS 507 Lecture 24 Mathematical, Statistical and Scientific Software Jan Verschelde, 22 October 2012 Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 1 / 38
Transcript of Ordinary Differential Equationshomepages.math.uic.edu/~jan/mcs507f12/solvingodes.pdf · Jan...
Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
MCS 507 Lecture 24Mathematical, Statistical and Scientific Software
Jan Verschelde, 22 October 2012
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 1 / 38
Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 2 / 38
a simple pendulum
Imagine a sphere attached to a massless rodoscilating back and forth due to gravity:
θ′′(t) + α sin(θ(t)) = 0,
where
t is time, starting at 0;
θ is the angle of deviation the rod makesfrom its (vertical) position at rest;
α = g/L, where g is the gravitational constantand L is the length of the rod.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 3 / 38
using sympy
For small angles, θ ≈ 0: sin(θ) ≈ θ.
>>> from sympy import *>>> L, t, g = var(’L, t, g’)>>> theta = Function(’theta’)>>> eq = L*Derivative(theta(t),t,2) + g*t>>> dsolve(eq,theta(t))theta(t) == C1 + C2*t - g*t**3/(6*L)
Using more terms in a series approximation for sin(θ),we obtain more accurate solutions.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 4 / 38
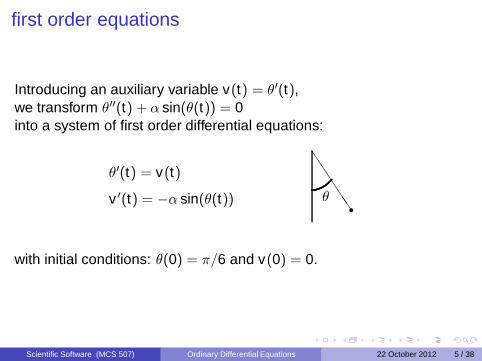
first order equations
Introducing an auxiliary variable v(t) = θ′(t),we transform θ′′(t) + α sin(θ(t)) = 0into a system of first order differential equations:
JJJJJ
θr
θ′(t) = v(t)
v ′(t) = −α sin(θ(t))
with initial conditions: θ(0) = π/6 and v(0) = 0.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 5 / 38
forward Euler method
We use the definition θ′(t) = limh→0
θ(t + h) − θ(t)h
to discretize the time domain with step size ∆t .
At t = tk , we approximate θ(tk ) ≈ θk andθ(tk+1) ≈ θk+1 for and tk+1 = tk + ∆t .
So θ′(t) = v(t) is approximated byθk+1 − θk
∆t= vk .
Then we compute θk+1 = θk + ∆tvk .
Similarly, v ′(t) = −α sin(θ(t))is approximated by vk+1 = vk − α∆t sin(θk ).
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 6 / 38
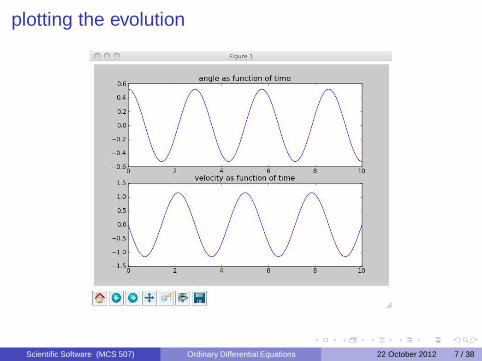
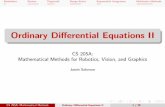
plotting the evolution
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 7 / 38
programming the Euler method
import scipy as spimport matplotlib.pyplot as plt
def pendulum(T,n,theta0,v0,alpha):"""Return the motion (theta, v, t) ofa pendulum, governed by the ODE:theta’’(t) + alpha*sin(theta(t)) = 0,where the parameters are
T : time t ranges from 0 to T,n : the number of time steps,theta0 : angle at t = 0,v0 : velocity at t = 0,alpha : value for the parameter.
"""
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 8 / 38
the code in pendulum
dt = T/float(n)t = sp.linspace(0,T,n+1)v = sp.zeros(n+1)theta = sp.zeros(n+1)v[0] = v0theta[0] = theta0for k in range(n):
theta[k+1] = theta[k] + dt*v[k]v[k+1] = v[k] - alpha*dt*sp.sin(theta[k+1])
return theta, v, t
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 9 / 38
the constants
def test_values():"""Returns values for the input data:T, n, theta0, v0, and alpha."""theta0 = sp.pi/6n = 1000T = 10v0 = 0alpha = 5return T, n, theta0, v0, alpha
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 10 / 38
the function main
def main():"""Defines the test values and computesthe trajectory of the pendulum."""T,n,p0,v0,a = test_values()theta,v,t = pendulum(T,n,p0,v0,a)f = plt.figure()f.add_subplot(211)plt.plot(t,theta)plt.title(’angle as function of time’)f.add_subplot(212)plt.plot(t,v,label=’velocity(t)’)plt.title(’velocity as function of time’)plt.show()
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 11 / 38
Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 12 / 38
calling ODEPACK
do from scipy.integrate.odepack import odeintthen help(odeint) shows
odeint(func, y0, t, ...)Solve a system of ordinary differential equationsusing lsoda from the FORTRAN library odepack.
Solves the initial value problem for stiff ornon-stiff systems of first order ode-s::
dy/dt = func(y,t0,...)
where y can be a vector.
ODEPACK is a FORTRAN77 library which implements AlanHindmarsh’s solvers for ordinary differential equations, available atwww.netlib.org/odepack.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 13 / 38
defining the right hand side
import scipy as spimport matplotlib.pyplot as pltfrom scipy.integrate.odepack import odeint
def f(y,t):"""Is the right hand side of theODE dy/dt = f(y,t)."""r = sp.array([0,0],float)r[0] = y[1]r[1] = -5.0*sp.sin(y[0])return r
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 14 / 38
the function main
def main():"""Computes the motion of a pendulum,governed by the ODE:theta’’(t) + alpha*sin(theta(t)) = 0,"""T = 10; n = 1000theta0 = sp.pi/6; v0 = 0tspan = sp.linspace(0,T,n+1)initc = sp.array([theta0,v0])y = odeint(f,initc,tspan)theta = y[:,0]v = y[:,1]
then plot (tspan,theta) and (tspan,v).
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 15 / 38

Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 16 / 38
differential equations
Consider three bodies with masses m1, m2, m3
with positions (x1(t), y1(t)), (x2(t), y2(t)), (x3(t), y3(t)).For the first body:
d2x1(t)dt2 = −
m2(x1(t) − x2(t))(
(x1(t) − x2(t))2 + (y1(t) − y2(t))2)3/2
−m3(x1(t) − x3(t))
(
(x1(t) − x3(t))2 + (y1(t) − y3(t))2)3/2
d2y1(t)dt2 = . . .
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 17 / 38
setting up the problem
With u1(t) and v1(t), the velocities of x1(t) and y1(t):
dx1(t)dt
= u1(t)
du1(t)dt
= . . .
dy1(t)dt
= v1(t)
dv1(t)dt
= . . .
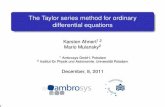
Adding the equations for the other two bodies,we get 12 first order differential equations.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 18 / 38
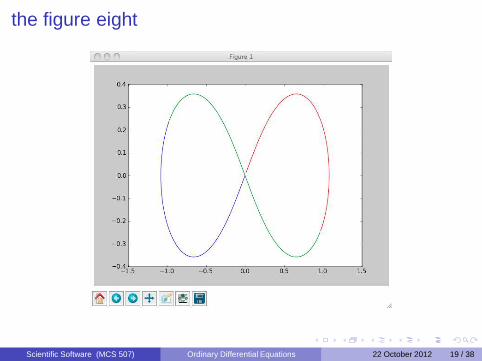
the figure eight
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 19 / 38
Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 20 / 38
defining the system
import scipy as spimport matplotlib.pyplot as pltfrom scipy.integrate.odepack import odeint
def f(z,t):"""z is a vector with 12 entriesordered in blocks of 4:x[k](t),x’[k](t),y[k](t),y’[k](t)for k = 1,2,3."""L = [0 for k in xrange(12)]r = sp.array(L,float)
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 21 / 38
relabeling
# take three equal massesm = [1, 1, 1]# relabel input vector zx1 = z[0]; u1 = z[1]; y1 = z[2]; v1 = z[3]x2 = z[4]; u2 = z[5]; y2 = z[6]; v2 = z[7]x3 = z[8]; u3 = z[9]; y3 = z[10]; v3 = z[11]# u and v are first derivatives of x and yr[0] = u1; r[2] = v1r[4] = u2; r[6] = v2r[8] = u3; r[10] = v3
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 22 / 38
computing distances
# compute squared distancesdx12 = x1 - x2; sdx12 = dx12**2dx13 = x1 - x3; sdx13 = dx13**2dx23 = x2 - x3; sdx23 = dx23**2dy12 = y1 - y2; sdy12 = dy12**2dy13 = y1 - y3; sdy13 = dy13**2dy23 = y2 - y3; sdy23 = dy23**2# denominatorsd12 = (sdx12 + sdy12)**1.5d13 = (sdx13 + sdy13)**1.5d23 = (sdx23 + sdy23)**1.5
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 23 / 38
assigning the result
# righthandside for second orderr[1] = - m[1]*dx12/d12 - m[2]*dx13/d13;r[3] = - m[1]*dy12/d12 - m[2]*dy13/d13;r[5] = - m[0]*(-dx12)/d12 - m[2]*dx23/d23;r[7] = - m[0]*(-dy12)/d12 - m[2]*dy23/d23;r[9] = - m[0]*(-dx13)/d13 - m[1]*(-dx23)/d23;r[11] = - m[0]*(-dy13)/d13 - m[1]*(-dy23)/d23;return r
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 24 / 38
the function main
def main():"""Plots the trajectories of 3 equal massesforming a figure 8."""# initial positionsip1 = [0.97000436, -0.24308753]ip2 = [-ip1[0], -ip1[1]]; ip3 = [0, 0]# initial velocitiesiv3 = [-0.93240737, -0.86473146]iv2 = [-iv3[0]/2, -iv3[1]/2]; iv1 = iv2# input for initial righthandside vectorinitz = [ip1[0], iv1[0], ip1[1], iv1[1], \
ip2[0], iv2[0], ip2[1], iv2[1], \ip3[0], iv3[0], ip3[1], iv3[1]]
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 25 / 38
solving the problem
T = 2*sp.pi/3; n = 1000tspan = sp.linspace(0,T,n+1)z = odeint(f,initz,tspan)# extracting the trajectoriesx1 = z[:,0]; y1 = z[:,2]x2 = z[:,4]; y2 = z[:,6]x3 = z[:,8]; y3 = z[:,10];# plotting the trajectoriesfig = plt.figure()plt.plot(x1,y1,’r’,x2,y2,’g’,x3,y3,’b’)plt.show()
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 26 / 38
an animation
def animate(z,nbframes):"""Makes an animation of the trajectoriescomputed by odeint in z, using nbframes."""x1 = z[:,0]; x2 = z[:,4]; x3 = z[:,8]y1 = z[:,2]; y2 = z[:,6]; y3 = z[:,10]n = len(x1); deltaframe = n/nbframes; frame = deltaframeplt.ion(); fig = plt.figure()ax = fig.add_subplot(111)ax.set_xlim(-1.5,1.5); ax.set_ylim(-0.5,0.5)for i in range(nbframes):
s1x = x1[1:frame]; s1y = y1[1:frame]s2x = x2[1:frame]; s2y = y2[1:frame]s3x = x3[1:frame]; s3y = y3[1:frame]ax.plot(s1x,s1y,’r’,s2x,s2y,’g’,s3x,s3y,’b’)fig.canvas.draw(); plt.pause(1)frame = frame + deltaframe
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 27 / 38
Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 28 / 38
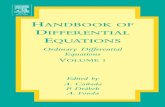
the tractrix problem
A tractor is connected to a trailer bya rigid bar of unit length.
The tractor moves in a circle.
The path of the trailer is the solution ofa system of ordinary differential equations.
Generalization: trailer is predator, tractor is prey.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 29 / 38
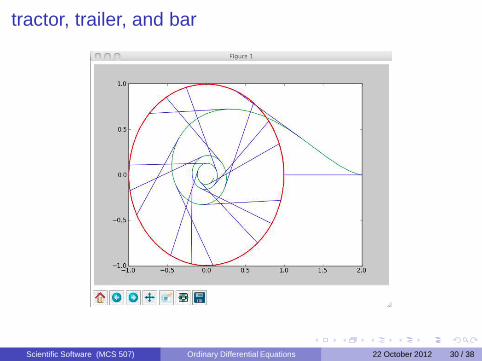
tractor, trailer, and bar
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 30 / 38
the model
Given are (x1(t), x2(t)) defining the path of the tractorand L is the length of the rigid bar.
Wanted: (y1(t), y2(t)), the path of the trailer.
The velocity vector of the trailer is parallelto the direction of the bar:
(
y ′
1y ′
2
)
= λ
(
y1 − x1
y2 − x2
)
, λ > 0.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 31 / 38
the ODE system
The velocity vector of the trailer is the projection of the velocity vectorof the tractor onto the direction of the bar:
u =(y1 − x1, y2 − x2)
||(y1 − x1, y2 − x2)||and v = (x ′
1, x ′
2),
we compute the projection of the velocity vector as (vT u)u.
Then the system of first-order equation that defines the path of thetrailer is given by
(
y ′
1y ′
2
)
= (vT u)u.
with u the normalized vector of the direction of the barand v the velocity vector of the tractor.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 32 / 38

Ordinary Differential Equations
1 An Oscillating Pendulumapplying the forward Euler methodusing odeint in odepack of scipy.integrate
2 Celestial Mechanicssimulating the n-body problemusing odeint in odepack of scipy.integrate
3 The Tractrix Problemsetting up the differential equationsusing odeint in odepack of scipy.integrate
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 33 / 38

the tractor
import scipy as spimport numpy as npimport matplotlib.pyplot as pltfrom scipy.integrate.odepack import odeint
def tractor(t):"""Returns the position (x,y)and velocity vector (u,v)for the tractor at time t."""x = sp.cos(t); y = sp.sin(t)u = -sp.sin(t); v = sp.cos(t)return x,y,u,v
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 34 / 38
the trailer
def trailer(y,t):"""Defines the right hand side ofthe system for the trailer."""r = np.array([0,0],float)x1, x2, x1v, x2v = tractor(t)r[0] = y[0] - x1r[1] = y[1] - x2r = r/np.linalg.norm(r)d = x1v*r[0] + x2v*r[1]r = d*rreturn r
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 35 / 38
solving the IVPdef main():
"""Defines the setup for the systemfor the trailer and solves it."""T = 20; n = 100tspan = sp.linspace(0,T,n+1)initc = sp.array([2,0])path = odeint(trailer,initc,tspan)x = path[:,0]; y = path[:,1]x1, x2, x1v, x2v = tractor(tspan)fig = plt.figure()plt.plot(x1,x2,’r’,x,y,’g’)for i in xrange(0,n,6):
plt.plot(sp.array([x1[i],x[i]]), \sp.array([x2[i],y[i]]),’b’)
plt.show()
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 36 / 38
Summary + Exercises
Appendices C, D, and E of the book are on differential equations.SciPy.integrate exports odeint() of odepack.
A.C. Hindmarsh: ODEPACK, A Systematized Collection of ODESolvers. In IMACS Transactions on Scientific Computation, Volume 1,pages 55-64, 1983, edited by R.S. Stepleman.
1 Extend the model for the n-body problem so it works for anynumber of bodies.
2 Instead of odeint() for the planar 3-body problem, write code forthe forward Euler method. For which value(s) of the step size doyou get the figure eight?
3 Make an animation of the trajectories of tractor, trailer, and themoving bar.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 37 / 38
more exercises
4 Solving y ′ = s(t)w where s(t) is the speed and w the normalizeddirection vector of a predator chasing a prey gives in y thecoordinates of the predator. Set up a model for a prey to move in astraight line and let s(t) be a large enough constant so the preygets caught. Plot the trajectories of prey and predator.
5 Read the documentation about solving ODEs in Sage and useSage to plot the trajectories either for the figure eight planar3-body or the tractrix problem.
Scientific Software (MCS 507) Ordinary Differential Equations 22 October 2012 38 / 38