
Order(N) Multibody Dynamics Part 1: Spatial Notation (draft!) Michael Sherman (Sherm) Revised: 7 Aug...
22
Order(N) Multibody Dynamics Part 1: Spatial Notation (draft!) Michael Sherman (Sherm) Revised: 7 Aug 2014
-
Upload
prudence-short -
Category
Documents
-
view
220 -
download
0
Transcript of Order(N) Multibody Dynamics Part 1: Spatial Notation (draft!) Michael Sherman (Sherm) Revised: 7 Aug...

Order(N) Multibody DynamicsPart 1: Spatial Notation (draft!)
Michael Sherman (Sherm)Revised: 7 Aug 2014

O(N) Topics• O(n) intro
– How not to form matrices (think operators)– Featherstone vs. Jain
• Look at algorithms– Simple, but some mystery symbols
• Notation and basic abstractions– Spatial notation, mobilizers, work in Ground …
• Demystify symbols• Look at Simbody implementation• Write code!• (NOT YET: constraints, prescribed motion)

Structure of O(N) algorithm
Abhi Jain

Articulated body inertia P
Jain, Alg. 6.1, pg 106

Forward dynamics
Jain, Alg. 16.2, pg 126

6
Notation Motivation• Good abstractions good code• You can’t reason about spatial algorithms if
you treat translation & rotation differently• Algorithms should look line-by-line just like the
ones in the books• Debugging much easier, API smaller• We need some common notation to
communicate clearly

7
Spatial Vector
x
y
z
x
y
z
vvv
Velocity
x
y
z
x
y
z
aaa
x
y
z
x
y
z
fff
Acceleration Force
Vec<2, Vec3>
V[0] rotational
V[1] translational
NOT Plücker vectors! Abhi Jain, not Roy Featherstone

8
Spatial Inertia Matrix
mcx
–mcx
0
0
mm
m
(sym)
xx xy xz
yy yz
zz
I I II I
I
Mat<2,2, Mat33>
Equivalent to MassProperties object
9
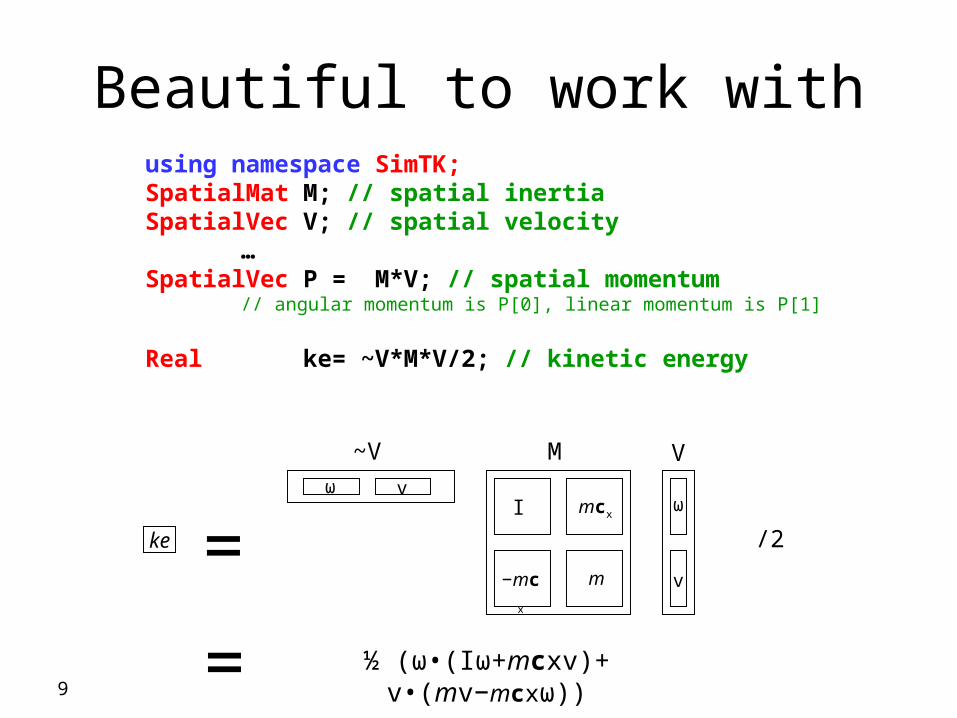
Beautiful to work withusing namespace SimTK;SpatialMat M; // spatial inertiaSpatialVec V; // spatial velocity
…SpatialVec P = M*V; // spatial momentum
// angular momentum is P[0], linear momentum is P[1]
Real ke= ~V*M*V/2; // kinetic energy
=ke
~V M V
/2
ωω
v
v
m
mcx
−mcx
I
= ½ (ω•(Iω+mcxv)+ v•(mv−mcxω))

10
Notation that works• A physical quantity
– Has a type, e.g. angular momentum– Is usually associated (“fixed to”) a body– Is measured with respect to something– Is expressed in some coordinate frame– Has units
• Many programming errors here• Good notation can almost eliminate
these problems

11
Basic notation
QiB
Type of quantity Which
instance (optional)
Fixed to which body?
• Implies several defaults– Measured in B’s frame, from B’s origin– Expressed in the B frame– Details depend on type of Q
• Code equivalent: Qi_B, v_B
BvA vector attached to body B, expressed
in B

12
Add explicit measured-in (“from”) frame
QMiB
Fixed to which body?
• New defaults– Measured in M’s frame, from M’s origin
– Expressed in the M frame
• Code equivalent: Qi_MB, w_GB
Measured with respect to which
body? G BAngular velocity of body B with respect to Ground,
expressed in GroundQFromiTo

13
Change expressed-in frame
QMiB
F
Fixed to which body?
• New defaults– Still measured in M’s frame, from M’s origin
– But expressed in the F frame
• Code equivalent: Qi_MB_F, w_PB_G
Measured with respect to which
body? PG
BAngular velocity of body
B with respect to its parent P, but expressed in
Ground
Expressed-in frame

14
Rotation matrix
~[ ] ~
~
B G
G B G B G B G B B G
B GR
xx y z y
z
(~ )
P B P F F M M B
P F F M B M
R R R R
R R R
q,u
M
F
MO
FO
mobilized body B( )F MR q
parent body P
B
P

15
For translations, specify points if not origin
BAP QpTo what point on
what body?
• New defaults– “From” frame implied by left superscript
– I.e., A frame above left, G frame above right
• Code equivalent: p_PaQb; p_GCb, p_GoCb
Measured from what point on what
body? BG CpVector from Ground
origin (implied) to body B’s mass center,
expressed in Ground
Point name conventions:O origin (implied)C mass center

16
Transforms
(0 0 0 1)
BG B G OG B R pX
Transform X_GB;Rotation& R_GB=X_GB.R();Vec3& T_GB=X_GB.p();

17
Transforms (cont.)
Transform X_PB=…;Vec3 p_BCb=…; // from B origin, in B frame impliedVec3 p_PoCb = X_PB*p_BCb; // implies P frame
B BBC CPP BX pp
q,u
M
F
MO
FO
parent body P
P
( )F MX q
( , )F MV q u
( , , )F MA q u u
Bmobilized body B
CB

18
Notational reality• Goal is correctness and clarity• Develop recognizable “cliches”• Use comments for anything unusual• Not perfectly unambiguous – this is for
humans– Ascii text is not very expressive
• Many variants possible, but we should try to be consistent
– Improvements solicited

19
A real example (as is)From MatterSubsystem.h
/// Return the angular and linear velocity of body B's frame in body A's frame,/// expressed in body A, and arranged as a SpatialVec.SpatialVec calcBodySpatialVelocityInBody(const State& s, BodyId objectBodyB, BodyId inBodyA) const{ const SpatialVec& V_GB = getBodyVelocity(s,objectBodyB); if (inBodyA == GroundId) return V_GB;
// Body A is not Ground so we'll have to compute relative velocity.
const SpatialVec& V_GA = getBodyVelocity(s,inBodyA); const Vec3 w_AB_G = V_GB[0]-V_GA[0]; // angular velocity of B in A, exp in G
// Angular velocity was easy, but linear velocity needs an wXr term. const Transform& X_GB = getBodyTransform(s,objectBodyB); const Transform& X_GA = getBodyTransform(s,inBodyA); const Vec3 p_OA_OB_G = X_GB.p() - X_GA.p(); // vector from OA to OB, exp in G
// linear velocity of OB in A, exp in G const Vec3 v_AB_G = (V_GB[1]-V_GA[1]) + w_AB_G % p_OA_OB_G;
// We're done, but the answer is expressed in Ground. Reexpress in A and return. const Rotation& R_GA = X_GA.R(); return SpatialVec(~R_GA*w_AB_G, ~R_GA*v_AB_G);}

20
Acknowledgments• Mathematical notation: Tom Kane, via
Dan Rosenthal and Paul Mitiguy • Guillermo Rodriguez & Abhi Jain (JPL)
– Spatial notation
• Charles Schwieters (NIH)– Templatized implementation in IVM
• NIH Roadmap grantU54 GM072970

21
Mobilizer kinematics
q,u
M
F
MO
FO
mobilized body B( )F MX q
parent body P
( ) O OF MF M F MRX q p
( , ) ( )F M F MV q u q u H
F M F M F M F MA V u u H H
( )q q u N
( , )F MV q u
( , , )F MA q u u define q
define u
relate q,u
Seth, et al. Nonlinear Dynamics 62, 2010

22
Discussion









![[Editors of Walter Foster, Sherm Cohen] Cartooning(BookZZ.org)](https://static.fdocuments.in/doc/165x107/563db93d550346aa9a9b65f9/editors-of-walter-foster-sherm-cohen-cartooningbookzzorg.jpg)








