OPTIMISATION OF LANE-CHANGING DISTRIBUTIONS FOR A … · 2018-01-29 · OPTIMISATION OF...
102
OPTIMISATION OF LANE-CHANGING DISTRIBUTIONS FOR A FREEWAY WEAVING SEGMENT A THESIS SUBMITTED TO THE SCIENCE AND ENGINEERING FACULTY OF QUEENSLAND UNIVERSITY OF TECHNOLOGY IN FULFILMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ENGINEERING (RESEARCH) David Sulejic Bachelor of Engineering (Civil) Principal Supervisor: Professor Edward Chung Associate Supervisor: Dr Nasser R. Sabar School of Civil Engineering and Built Environment Science and Engineering Faculty Queensland University of Technology 2018
Transcript of OPTIMISATION OF LANE-CHANGING DISTRIBUTIONS FOR A … · 2018-01-29 · OPTIMISATION OF...

OPTIMISATION OF LANE-CHANGING DISTRIBUTIONS
FOR A FREEWAY WEAVING SEGMENT
A THESIS SUBMITTED TO
THE SCIENCE AND ENGINEERING FACULTY
OF QUEENSLAND UNIVERSITY OF TECHNOLOGY
IN FULFILMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF ENGINEERING (RESEARCH)
David SulejicBachelor of Engineering (Civil)
Principal Supervisor: Professor Edward Chung
Associate Supervisor: Dr Nasser R. Sabar
School of Civil Engineering and Built Environment
Science and Engineering Faculty
Queensland University of Technology
2018


Copyright in Relation to This Thesis
c© Copyright 2018 by David Sulejic. All rights reserved.
Statement of Original Authorship
The work contained in this thesis has not been previously submitted to meet requirements for an
award at this or any other higher education institution. To the best of my knowledge and belief,
the thesis contains no material previously published or written by another person except where
due reference is made.
Signature:
Date:
i
11/01/2018
QUT Verified Signature

ii

This thesis is dedicated with love to my dearest family and my
beloved wife, Lisa.
iii

iv

Abstract
Empirical studies have observed a lane-changing concentration problem in freeway weaving
segments which can cause flow break down and congestion. This research focuses on the
lane-changing concentration problem in weaving segments. A cooperative intelligent transport
system advisory has been shown to alleviate such a problem. The advisory aims to distribute
the lane-changing along the weaving segment. Unlike previous methods in the literature, where
weaving vehicles are assigned according to fixed distributions, this thesis proposes an algo-
rithm to optimise the lane-changing distributions. The proposed optimisation algorithm was
developed based on particle swarm optimisation.
The research applies a microscopic simulation in Aimsun to evaluate the optimised lane-
changing distribution for a one-sided freeway weaving segment. The simulation results show
that the proposed particle swarm optimisation algorithm can be used as a successful optimisa-
tion method for the lane-changing distributions.
The proposed C-ITS advisory, using the optimised lane-changing distributions, effectively
distributes lane changes along the freeway weaving segment to improve the performance. The
evaluation revealed that the proposed strategy has the potential to reduce delay, to increase
traffic speed and smooth traffic flow dynamics.
v

vi

Keywords
particle swarm optimisation, cooperative intelligent transport systems, freeway weaving seg-
ment, lane-changing advisory, traffic simulation, Aimsun.
vii

viii

Acknowledgments
The author would like to acknowledge the Department of Transport and Main Roads, Queens-
land, for providing the support to perform this research under the Study and Research Assisted
Scheme.
I would like to express my sincere gratitude to my principal supervisor, Professor Edward
Chung, for giving me the opportunity to complete the master’s degree. Thank you for your
continuous support and mentorship in my academic studies and professional career. I would
like to thank my associate supervisor, Dr Rui Jiang, for his guidance and instruction during the
first half of my graduate studies. I would also like to thank my associate supervisor, Dr Nasser
Sabar, for his guidance and expertise in completing my studies; your knowledge and support
has been valuable to me.
Professional editor Jennifer Beale provided copy-editing and proofreading services, accord-
ing to the guidelines laid out in the university-endorsed national ‘Guidelines for editing research
theses’.
ix

x

Table of Contents
Abstract v
Keywords vii
Acknowledgments ix
Nomenclature xv
List of Figures xviii
List of Tables xix
1 Introduction 1
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Research problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Research objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Research Significance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Literature Review 7
2.1 Weaving segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Weaving segment definition . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2 Factors influencing weaving capacity . . . . . . . . . . . . . . . . . . 8
2.1.3 Driving behaviour at weaving segments . . . . . . . . . . . . . . . . . 10
xi

2.1.4 Weaving segment management techniques . . . . . . . . . . . . . . . . 12
2.2 Cooperative intelligent transport systems . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Connected vehicles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2 C-ITS applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Heuristic optimisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.1 Particle swarm optimisation . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.2 Particle swarm optimisation: traffic and transportation engineering ap-
plications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 Methodology 23
3.1 Research design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Basic concept and assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3 Proposed optimisation algorithm . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3.1 Proposed PSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3.2 Solution representation . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.3 Co-evolutionary optimisation . . . . . . . . . . . . . . . . . . . . . . 31
3.3.4 Initialisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.5 Objective function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.6 Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3.7 Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3.8 Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3.9 Termination criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4 Case Study 39
4.1 Simulation test bed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Performance indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
xii

4.3 Evaluation of the proposed PSO algorithm . . . . . . . . . . . . . . . . . . . . 42
4.4 Simulation results and discussion . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.4.1 Performance evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.4.2 Impact of different OD demands . . . . . . . . . . . . . . . . . . . . . 47
4.4.3 Sensitivity analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4.4 Application domain analysis . . . . . . . . . . . . . . . . . . . . . . . 57
4.4.5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 Conclusions 63
5.1 Research findings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2 Recommendations for future work . . . . . . . . . . . . . . . . . . . . . . . . 64
A Sensitivity tests – traffic demand 67
B Lane-changing distribution 69
References 78
xiii

xiv

List of Abbreviations
API Application programming interface
C-ITS Cooperative intelligent transport systems
DSRC Dedicated short range communications
FF Freeway to freeway
FR Freeway to ramp
LC Lane-changing
O–D Origin–destination
PSO Particle swarm optimisation
RF Ramp to freeway
RM Ramp metering
RSU Roadside unit
RR Ramp to ramp
V2I Vehicle to infrastructure communication
V2V Vehicle to vehicle communication
xv

xvi

List of Figures
2.1 Formation of a weaving segment . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 One-sided ramp weave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Weaving management scenario: longitudinal solid pavement line marking (Al-
Jameel, 2013) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1 Research methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 One-sided weaving segment . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 The process chart for the lane-changing advisory application . . . . . . . . . . 27
3.4 In-vehicle visual display unit (Transport for NSW, 2015) . . . . . . . . . . . . 29
3.5 Solution representation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.6 Co-evolutionary optimisation method . . . . . . . . . . . . . . . . . . . . . . 32
3.7 PSO cycle process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.8 The flowchart of PSO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1 M60 Motorway test bed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.2 Proposed PSO results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.3 Speed profile on critical weaving lanes . . . . . . . . . . . . . . . . . . . . . . 46
4.4 Contour speeds of lane 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.5 Contour speeds of auxiliary lane . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.6 Average delay results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.7 Auxiliary lane speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.8 Lane 3 speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
xvii

4.9 Lane-changing distributions (Base case) . . . . . . . . . . . . . . . . . . . . . 56
4.10 Lane-changing distributions (Optimised case) . . . . . . . . . . . . . . . . . . 56
4.11 Density across all lanes (Test 311) . . . . . . . . . . . . . . . . . . . . . . . . 60
xviii

List of Tables
3.1 Notations of parameters and variables . . . . . . . . . . . . . . . . . . . . . . 30
4.1 Weaving segment parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Proposed PSO test runs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3 Fitness values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4 Average delay comparison between base case and optimised case . . . . . . . . 45
4.5 Different demand setting (veh/h) . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.6 Traffic demand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.7 Lane-changing distribution (Base case) . . . . . . . . . . . . . . . . . . . . . . 57
4.8 Lane-changing distribution (optimised case) . . . . . . . . . . . . . . . . . . . 58
A.1 Sensitivity tests – traffic demand . . . . . . . . . . . . . . . . . . . . . . . . . 67
B.1 Lane-changing advisory distributions . . . . . . . . . . . . . . . . . . . . . . . 69
B.2 Number of lane changes – Base case . . . . . . . . . . . . . . . . . . . . . . . 70
B.3 Number of lane changes – Optimised case . . . . . . . . . . . . . . . . . . . . 71
xix

xx

Chapter 1
Introduction
1.1 Background
Traffic congestion has become a significant problem in major world cities with the increase in
travel demand and private vehicle usage, as well as constrained roadway infrastructure capacity.
According to the Australian Government Bureau of Infrastructure, Transport and Regional
Economics (BITRE) (2015), the avoidable cost of congestion for Australian capital cities was
estimated to be around $16.5 billion for the 2015 financial year and is projected to rise to around
$30 billion by 2030.
A freeway network is a core component of a transportation system, as it provides an un-
hindered, high-speed, high-capacity flow of traffic. Freeway networks regularly experience
congestion due to peaks in traffic demand and incidents. Typically, traffic congestion leads to an
underutilisation of existing infrastructure assets, thus contributing to an accelerated increase in
congestion that results in excess delays, reduced safety and increased environmental pollution.
The traditional approach of continuously expanding infrastructure supply to meet the in-
creasing transportation demand of developed cities is becoming more difficult due to environ-
mental concerns, limited physical capacity and tightening fiscal constraints. Responsible road
authorities are beginning to realise that expensive freeway infrastructure, intended to deliver a
nominal capacity, is significantly underutilised due to congestion, usually, at times, maximum
capacity is most needed. This can be attributed to the lack of efficient, comprehensive traffic
control systems (Papageorgiou et al., 2003).
1

2 CHAPTER 1. INTRODUCTION
The solution to traffic congestion, therefore, requires the optimal use of existing infras-
tructure by traffic control systems. Intelligent transportation systems (ITS) have a variety of
traffic control applications for effective freeway management such as ramp metering, variable
speed limits and variable message signs. In particular, rapid developments in cooperative intelli-
gent transport systems (C-ITS), based on vehicle-to-vehicle (V2V) and vehicle-to-infrastructure
(V2I) communication technologies, have enabled new control strategies for the improvement of
traffic safety and efficiency.
Recent advancements in the field of C-ITS have enabled connected vehicles to send and
receive real-time information (Weiß, 2011). Vehicle to vehicle (V2V) and vehicle to roadside
infrastructure (V2I) communications have been extensively tested in real-world applications. In
recent field trials, C-ITS applications have been shown to provide traffic safety, efficiency and
environmental benefits (Green et al., 2014).
C-ITS provides a platform for active traffic flow management (Alexander et al., 2011).
C-ITS connectivity can provide detailed individual vehicular data including speed, accelera-
tion/deceleration, position and so on and a capability to relay personalised messages to drivers,
that is, information customised for each individual driver, such as speed adjustment or lane-
change advisories (Park and Smith, 2012). C-ITS allows better control than that of traditional
traffic control applications, such as ramp metering and variable speed limits, which depend on
passive point sensors that collect aggregated data and general advisory traveller information
tools (Park and Smith, 2012). C-ITS applications will benefit in supporting traffic control
operations and can be implemented to control and guide individual vehicles.
Several communications platforms such as the 3G or 4G mobile phone network and ded-
icated short-range communications (DSRC) can be used to carry communications between
vehicles and roadside units (Wall et al., 2014). Infrastructure-to-vehicle communications can
enable variable speed limits and advisories provided directly to drivers (Shladover, 2017). For
this study, the individual driver advisory for the lane-changing is not considered a time-critical
or safety-critical application, as such, it does not need the very low latency of DSRC; 3G or 4G
communications would suffice.
Traffic control is a complex subject, and its parameters are uncertain, non-linear and dy-
namic. Complex traffic problems call for the development of modern systems that merge
knowledge, techniques, and methodologies from various scientific areas (Teodorovic, 2008).

1.2. RESEARCH PROBLEM 3
The development of various algorithms, inspired by nature and designed for many real-life
problems, could be fundamental in solving traffic engineering problems, such as urban traffic
congestion.
1.2 Research problem
Traffic congestion, a major problem, reduces efficiency on the highway network by 20% to
50% (Chen et al., 2001). A major cause of congestion is the inefficient operation of highways
during periods of high demand. Congestion on freeways often occurs at specific locations such
as on-ramps, lane drops, crests, sags and sharp bends (Scarinci and Heydecker, 2014). Freeway
weaving segments are a frequent source of traffic bottleneck congestion, whose complex traffic
patterns and capacity variations present significant operational problems on freeways (Kwon,
2003). Increasing the operational efficiency at vulnerable locations of the highway network is a
practical method to reduce traffic congestion.
Weaving segments, a common design for freeways, are formed when merge segments are
closely followed by diverge segments (TRB, 2010). The Highway Capacity Manual (TRB,
2010, ch. 12) defines weaving as “the crossing of two or more traffic streams travelling in the
same direction along a significant length of freeway without the aid of traffic control devices.”
Weaving segments require intense lane-changing (LC) manoeuvres for drivers to access the lane
appropriate for their desired exit. They involve complex vehicle interactions, which presents
safety and operational problems. The traffic in a weaving segment is subject to more LC
turbulence than that normally present on basic freeway segments (TRB, 2010). Empirical
studies have shown that drivers tend to perform lane changes soon after they enter the weaving
segment, especially under capacity conditions (Cassidy and May, 1991). This behaviour, known
as the LC concentration problem, causes a bottleneck around the merge gore area which can lead
to congestion.
A C-ITS advisory, using V2I communications, is a potential application that can solve
the LC concentration problem in a freeway weaving segment by distributing LC along the
weaving segment to better utilise the existing roadway infrastructure. Recent efforts have
been made to model driving behaviours in a connected vehicle environment (Talebpour et al.,
2015). For instance, Mai et al. (2016) used a C-ITS-based LC advisory to improve the LC

4 CHAPTER 1. INTRODUCTION
concentration problem on weaving segments by distributing the LC over the segment length.
Their concept proposed an advisory that relies on V2I communications, independent from V2V
communications. Hence, the control strategy seeks to change LC behaviour while avoiding the
complexities of anticipated vehicle dynamics (acceleration, speed, deceleration). The proposed
strategy has the potential to improve average delay by up to 46%. In the study, the advisory
assumed a predefined set of LC advisory distributions; however, the LC distributions were not
optimised to improve the traffic performance of the weaving segment.
The proposed work closely follows the work done by Mai et al. (2016), mainly, the basic
concept and assumptions of the C-ITS advisory control strategy and the case study. In their
study, three combinations of the lane-changing distributions were tested. For each combination,
the advisory distributed lane-changes based on the percentages assigned to each section (total
of four sections). Their study focussed on the feasibility and effectiveness of the lane-changing
application, rather than seeking the optimal solution for the advisory distribution. In this study,
the C-ITS advisory distributes lane-changing into eight sections of the weaving segment to
achieve better utilisation. The main contribution of this study is to develop an algorithm to
optimise the lane-changing distributions at a freeway weaving segment. The methodology is
based on a C-ITS advisory control strategy.
1.3 Research objectives
This research proposed that an optimisation algorithm, based on particle swarm optimisation
(PSO), be implemented to improve the LC advisory distribution. The proposed method was
evaluated for a basic, one-sided ramp freeway weaving segment with a short-length weaving
configuration of 400 m between merging and diverging segments. Traffic simulation was used
to evaluate the traffic performance of the weaving segment.
This research aims to:
1. Present an improved C-ITS-based advisory strategy for weaving vehicles (section 3.2)
2. Propose an optimisation algorithm to improve the LC-advisory distribution for weaving
vehicles (section 3.3)
3. Present the results of the proposed PSO algorithm (section 4.3)

1.4. RESEARCH SIGNIFICANCE 5
4. Present the analysis of the LC distributions based on traffic simulation (section 4.4).
The major objective of this research is to develop a modified PSO algorithm to distribute
LC along a freeway weaving segment to improve traffic performance.
1.4 Research Significance
The significance of this research is its contribution to the field of traffic engineering optimisa-
tion. The research will focus on a C-ITS-based advisory strategy for freeway weaving segments.
Traffic simulation will be used as the method of evaluation. The research is expected to have
both a scientific and practical significance.
• Scientific significance: to the best of the author’s knowledge, this research is the first
attempt to develop an optimisation algorithm to improve the LC distribution at a freeway
weaving segment
• Practical significance: the optimised LC advisory distributions can provide useful insight
for road operators to implement and improve traffic control strategies at existing one-sided
ramp weaves; particularly, with the emergence and adoption of C-ITS-based technologies.
1.5 Thesis Outline
The thesis is outlined as follows:
Chapter 2 reviews the existing literature on freeway weaving segments, C-ITS and heuristic
optimisation.
Chapter 3 details the research methodology, presents the advisory control concept and its
assumptions and proposes an optimisation algorithm.
Chapter 4 describes the case study and tested scenarios.
Chapter 5 summarises the main findings of the research and recommends future works.

6 CHAPTER 1. INTRODUCTION

Chapter 2
Literature Review
This chapter provides the theoretical and methodological contributions underlying the study.
The chapter firstly reviews the freeway weaving segment: factors influencing freeway weaving
capacity, empirical research on the lane-changing concentration problem and weaving manage-
ment techniques. The chapter then briefly introduces cooperative intelligent transport systems
and C-ITS applications, followed by an overview of heuristic optimisation algorithms and their
application in traffic optimisation problems.
2.1 Weaving segments
2.1.1 Weaving segment definition
The Highway Capacity Manual 2010 (TRB, 2010) defines weaving as:
“the crossing of two or more traffic streams travelling in the same direction along a signifi-
cant length of highway without the aid of traffic control devices (except for guide signs). Thus,
weaving segments are formed when merge segments are closely followed by diverge segments.”
The weaving segment is subject to significant LC activity, as drivers manoeuvre from their
arrival leg to the desired departure leg. Hence, traffic in a weaving segment is subject to LC
turbulence more than that normally present on basic freeway segments (TRB, 2010).
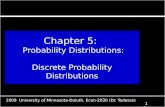
Figure 2.1 displays the general formation of a weaving segment. Drivers entering on Leg A
and exiting on Leg D must cross the path of vehicles entering on Leg B and exiting on Leg C.
Flows A–D and B–C are, therefore, referred to as weaving movements. Flows A–C and BD,
7

8 CHAPTER 2. LITERATURE REVIEW
referred to as non-weaving movements, do not have to cross the path of any other flow. The
movements are defined as follows:
• A–C: Freeway-to-freeway (FF)
• A–D: Freeway-to-ramp (FR)
• B–D: Ramp-to-ramp (RR)
• B–C: Ramp-to-freeway (RF).
Figure 2.1: Formation of a weaving segment
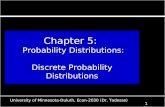
The configuration of a weaving segment affects its operating characteristics. This research
focuses only on a one-sided ramp-weave configuration (figure 2.2), whereby no weaving ma-
noeuvres require more than two lane changes to be completed successfully, and all weaving
drivers must execute a lane change across the lane line separating the auxiliary lane from the
left lane of the mainline.
Figure 2.2: One-sided ramp weave
2.1.2 Factors influencing weaving capacity
Capacity is typically expressed as the maximum flow rate of vehicles that can reasonably be
expected to travel through a given facility. Numerous factors affect the capacity of freeway

2.1. WEAVING SEGMENTS 9
weaving segments: number of lanes in the weaving segment, length of weaving segment,
traffic composition, driver characteristics, lane widths, geometric configuration, volume ratio
and weaving ratio (Shoraka and Puan, 2010). This section outlines some of these factors.
Volume ratio
Volume ratio (VR) is the ratio of the weaving demand flow rate to the total demand flow rate in
the weaving segment, V R = V(AD+BC)/Vtotal.
Weaving ratio
The weaving ratio (R) is defined as the ratio of the smaller weaving demand flow rate to the total
weaving demand flow rate in the weaving segment, R = VAD/V(AD+BC) or VBC/V(AD+BC).
Weaving segment length
The weaving segment length is the distance between points in the respective gore areas where
the right edge of the ramp-travelled lane and the left edge of the freeway-travelled lane meet
(TRB, 2010).
The weaving segment length influences LC intensity. For any given demand situation,
longer segments allow weaving vehicles more time and space to find an acceptable gap to
execute lane changes. Consequently, this reduces the density of lane changing and, therefore,
the turbulence.
However, the simulation study by Vermijs (1998) showed that although the weaving length
helps increase weaving capacity, it has minimal effect on the capacity beyond a certain length.
It showed that a weaving segment length more than 400 m does not help to increase weaving
capacity.
Zhang and Rakha (2008) also demonstrated by simulation results that as the weaving seg-
ment length increases, its impact on the weaving segment capacity decreases.
The empirical comparison by He and Menendez (2016a) between longer and shorter weav-
ing segments concluded that the length of the weaving segment has limited influence on the
capacity and operation of the freeway weaving segment.

10 CHAPTER 2. LITERATURE REVIEW
Weaving segment width
“The width of a weaving segment is measured as the number of continuous lanes with the
segment, that is, the number of continuous lanes between the entry and exit gore areas” (TRB,
2010, ch. 12).
Additional lanes provide more space for weaving and non-weaving vehicles; however, they
encourage additional optional LC activity. Thus, while reducing overall densities, additional
lanes can increase LC and intensity.
Traffic flow composition
Traffic flow composition affects weaving capacity. Heavy vehicles, such as trucks, buses and
recreational vehicles, often occupy more space and require more time to execute a lane change
due to their limited manoeuvrability, compared with passenger cars (Vermijs, 1998).
2.1.3 Driving behaviour at weaving segments
This subsection briefly reviews the literature related to driver behaviour in weaving segments
that cause a LC concentration problem. The problem has been observed in several empirical
studies.
Early research by Cassidy and May (1991) analysed the traffic flow behaviour in the in-
dividual lanes of a weaving segment. Their research showed that a high concentration of LC
manoeuvres occurred near the weaving entrance. The majority of lane changes were made
before a reference point, 76 m from the merge gore of a 445 m section. Their analysis suggested
that, as the weaving flow increased, weaving vehicles become more anxious to change lanes
over shorter travelled distances. They suggested that this increased feeling of pressure may
encourage motorists to perform lane-change manoeuvres as soon as possible. Hence, this
behaviour may result in increased turbulence in the weaving area: decreasing weaving area
capacity and becoming more vulnerable to congestion.
Research by Kwon et al. (2000) showed similar weaving behaviour for a short, one-sided
weaving section of 129 m. They observed that “most merging and diverging vehicles complete
their lane changes before they reach approximately the middle point of the weaving zone” (p.

2.1. WEAVING SEGMENTS 11
136). They found that as the weaving flow began to increase, the diverging vehicles began to
change to the auxiliary lane as soon as they entered the weaving zone.
Denny and Williams (2005) conducted a pilot study on a freeway weaving segment in
Houston. They observed from field studies that weaving manoeuvres were not uniformly
distributed along the weaving segment at capacity. In fact, their observations showed that about
85% of the manoeuvres took place in the first 120-150 m of a 400 m segment.
Lee (2008), who investigated the traffic behaviour in freeway weaving bottlenecks, found
that a high concentration of diverging manoeuvres near the on-ramp triggered bottlenecks,
resulting in vehicle slow-downs. Lee, (p. 59) concluded that “it is not only the amount of
lane changes that influence weaving bottleneck discharge flows, but also the concentrations of
these manoeuvres”.
Al-Jameel (2013) has recently investigated driver behaviour in weaving segments as part of
an empirical study. In that study, investigation of LC locations within a 400 m weaving segment
found that 80% of merging vehicles and up to 90% of diverging vehicles performed lane changes
in the first 100 m of the section. Observations found that the location of the bottleneck would
start at about 70 m and would oscillate between this location and the entrance point of the merge
segment, propagating congestion upstream from the entrance area.
In a recent empirical study to compare longer and shorter weaving sections, He and Menen-
dez (2016b) found that 70% of the total lane changes happen within the first 19% of the 570 m
weaving section length. They found that this, which caused the speed to be lower at the merge
location due to the intense lane change activities, was the likely cause of the weaving section
bottleneck.
The C-ITS strategy proposed by Mai et al. (2016) used an LC advisory to distribute lane-
changes along an entire weaving segment. Their study showed that such an advisory could
potentially reduce delay significantly.
According to the literature, the LC concentration problem can be observed to occur in
weaving segments, particularly when the weaving flow increases. This behaviour can lead to
congestion, reducing the weaving capacity. The problem can be alleviated by distributing lane
changes along the entire weaving segment. This can be achieved by using a C-ITS advisory to
better distribute lane changes along the weaving segment.

12 CHAPTER 2. LITERATURE REVIEW
2.1.4 Weaving segment management techniques
The bottleneck that is formed by the LC concentration of weaving vehicles is a problem: better
management of the existing infrastructure is an effective solution.
Techniques for alleviating the LC concentration close to the merge gore areas have been
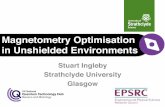
proposed in the literature. Al-Jameel (2013) proposed a management scenario to shift the
diverging vehicles to a certain distance downstream of the entrance point. The management
scenario, as depicted in figure 2.3, used a solid line marking to prevent diverging vehicles from
making a lane change early, while a parallel broken line permitted merging vehicles to change
lanes. Different solid line lengths were tested and 150 m (for a 500 m weaving length) provided
the best case for maximum throughput (from 7050 veh/h to 7400 veh/h).
Zhao et al. (2016) proposed a control method, combining lane assignment and on-ramp
Figure 2.3: Weaving management scenario: longitudinal solid pavement line marking (Al-Jameel, 2013)

2.2. COOPERATIVE INTELLIGENT TRANSPORT SYSTEMS 13
signal control, for improving traffic performance in a weaving segment. Furthermore, an op-
timisation model, based on a mixed-integer-non-linear program was formulated to select the
control strategies. The results showed capacity improvement for the weaving segment. This
study proposes an optimisation algorithm for the LC advisory distributions.
Mai et al. (2016) proposed a weaving management scenario based on C-ITS to distribute
lane-changes along an entire weaving segment. Their study demonstrated that the C-ITS-based
advisory could improve the LC concentration problem and alleviate bottlenecks. This study
adopts and refines the C-ITS-based advisory proposed by Mai et al. (2016).
2.2 Cooperative intelligent transport systems
Cooperative intelligent transport systems (C-ITS) is a platform that can be applied to vehicles
and roadside infrastructure to enable direct two-way communication. C-ITS enables real-time
information sharing between vehicles and roadside infrastructure, as well as with wireless
consumer devices (Austroads, 2012a). Austroads (2012a) define ‘cooperative’ in C-ITS as the
provision of connectivity through wireless communication:
• Vehicle to vehicle (V2V)
• Vehicle to infrastructure (V2I) and vice versa (I2V)
• Vehicle to other entities with wireless communications (V2X); for example, pedestrians
and cyclists.
The critical concept of C-ITS is to provide a platform within the vehicle that will expand
on available cellular based connectivity and provide dedicated short-range communications
(DSRC) connectivity (Austroads, 2015). DSRC is assigned a 5.9 GHz bandwidth for transport
applications. Using 5.9 GHz DSRC communications, a vehicle can link with a roadside unit
(RSU) to send and receive information. For example, a RSU can forward personalised messages
to targeted groups of vehicles for more refined traffic management.
Recent developments in C-ITS applications aim to deliver environmental, efficiency and
safety benefits to road users (Green et al., 2014). C-ITS allows the exchange of real-time
information between vehicles and infrastructure; therefore, producing richer traffic data at a

14 CHAPTER 2. LITERATURE REVIEW
finer resolution. This has implications for traffic control. V2I communications enable an
additional layer of benefits that can enhance traffic management and relieve congestion.
2.2.1 Connected vehicles
Automated vehicles have attracted keen media attention because of their many potential bene-
fits. The Society of Automation Engineers (SAE) (United States Department of Transportation,
2017) have identified five levels of vehicle automation: driver assistance, partial automation,
conditional automation, high automation and full automation. At each level progression, the
vehicle is capable of performing more driving functions than the previous level, depending
on the driving conditions. Automation is a tool for solving transportation problems, such as
alleviating congestion, reducing emissions and improving safety.
Regardless of the various predictions, ambitious or conservative, concerning the timeline
for the introduction of vehicle automation, it is crucial for the vehicles to be connected. C-
ITS-enabled vehicles, also known as connected vehicles, can ‘talk’ and ‘listen’ as well as ‘see’
by using 5.9 GHz DSRC communications. They communicate individual vehicle data directly
rather than sensing indirectly; providing faster, richer and more accurate information.
The author believes the introduction of level 5 automation is unlikely, based on technological
feasibility, in the near future. Therefore, a C-ITS-based advisory has been implemented in this
study.
2.2.2 C-ITS applications
Key themes in the development of C-ITS applications are those that provide safety, efficiency
and environmental outcomes. This section summarises these applications.
Safety
Road safety is an essential issue for road authorities and the broader community. The cost of
road crashes on the road is significant, in terms of death, injury and cost. The annual economic
cost of road crashes in Australia is estimated at $27 billion per annum (Bureau of Infrastructure,

2.2. COOPERATIVE INTELLIGENT TRANSPORT SYSTEMS 15
Transport and Regional Economics (BITRE), 2015). Austroads (2012b) estimates that, hypo-
thetically, with full penetration of C-ITS technology in vehicles, serious casualty crashes could
be reduced by 25% to 35%. Hence, C-ITS applications for safety can provide significant cost
savings to the economy and can help reduce road crashes and fatalities.
C-ITS applications, with their increased connectivity between road users and their envi-
ronment, offer capabilities beyond that of sensor-based applications. C-ITS enables vehicles
to monitor and be warned of potentially dangerous situations and hazardous conditions on the
road (Austroads, 2013). C-ITS will become more integrated with wireless technologies, which
will increase the safety of the interactions between vehicles and bicycles, pedestrians and trains.
Safety alerts and warnings can be communicated to the driver using the onboard equipment.
Kanazawa et al. (2010) provided an overview of field operations tests of C-ITS technologies
used on Japan’s next-generation roadways (SmartWay). The ‘forward obstacle information
provision’ application was tested to prevent sharp braking and rear-end collisions at a site where
a vertical crest approaching an intersection reduced the visibility of stopped vehicles. The
application used both roadside sensors, to detect stopped vehicles, and V2I communication to
relay information, through an onboard unit, to alert approaching vehicles.
Efficiency
The transport system currently faces challenges, with increasing traffic demand and more con-
gestion. Forecasts estimate that congestion will considerably increase in the future. According
to a report by The Department of Infrastructure and Regional Development (2015), “the cost
of congestion in our capital cities, estimated at $13.7 billion in 2011, is expected to increase
to around $53.3 billion in 2031, or around 290 per cent, in the absence of additional capacity
and/or demand management.” C-ITS has the potential to enable capacity improvements.
ITS applications are deployed to alleviate and manage the impact of congestion on the
transport network. Conventional ITS devices, such as variable message signs, variable speed
limits, and ramp metering, rely on aggregated, flow-level traffic control. Conversely, C-ITS
provides rich traffic information, including speed, acceleration, location and direction of C-
ITS-enabled vehicles. Hence, C-ITS can be implemented to control traffic at a more refined
level. C-ITS-enabled vehicles may cooperate with the infrastructure to increase connectivity
and provide control at an individual level. This level of control can result in a reduction of

16 CHAPTER 2. LITERATURE REVIEW
flow break down and delays. Tientrakool et al. (2011) estimates that if all of the vehicles use
sensors alone, the increase in highway capacity is about 43%; however, if all of the vehicles use
both sensors and V2V communication, the increase is about 273%. C-ITS applications, used to
inform road users of real-time traffic information, may better utilise the network and improve
the efficiency.
A ‘merging assistance’ application, tested in Japan, provided vehicles in the main lane with
information on the existence of merging vehicles (Kanazawa et al., 2010). Weiß (2011) provides
an overview of C-ITS applications, tested in Europe, covering three categories: traffic efficiency,
driver assistance/safety and commercial services. Traffic efficiency applications include alerting
drivers to changed traffic situations, traffic flow information, and traffic management.
Environmental
Emissions from transport pollute the environment affecting air quality, particularly in urban
areas. In recent decades, the automobile industry has increased their attention to more “eco-
friendly” vehicles (such as electric and hybrid vehicles) that produce fewer emissions than petrol
vehicles. Their efforts have improved the environmental credentials of passenger cars; however,
increasing transport demand will only perpetuate the emissions produced by the transport sector.
According to the Bureau of Infrastructure, Transport and Regional Economics (BITRE) (2009),
the passenger car fleet, in 2020, will remain the single most significant contributor to transport
sector emissions (around 47 percent of domestic transport output). Hence, there is a demand
for C-ITS applications with positive environmental outcomes.
Efficiency applications are closely related to environmental applications. C-ITS applications
that improve traffic flow and reduce delays will reduce overall network emissions. For example,
V2I applications, that coordinate vehicle speed with signal phasing, have been modelled to
deliver fuel savings and reduce emissions. C-ITS applications that enable road users to make
informed decisions and that provide advisory control will result in higher network efficiency,
reducing congestion and, hence, overall emissions.

2.3. HEURISTIC OPTIMISATION 17
2.3 Heuristic optimisation
This section provides a general overview of heuristic optimisation and how it is used to solve
traffic optimisation problems.
The primary task in an optimisation problem is to find the optimal solution by using some
optimisation technique. Applications of heuristic search algorithms inspired by natural phe-
nomena are rapidly growing in diverse scientific fields to solve tough optimisation problems.
Researchers have successfully applied heuristic algorithms to a wide variety of civil engineering
optimisation problems because heuristic algorithms are not problem-specific, do not require
the objective function to be continuous or differentiable (unlike gradient-based optimisation
algorithms like the quasi-Newton method), can incorporate constraints, can search vast spaces
of candidate solutions (Gopalakrishnan et al., 2013). Heuristic algorithms find quality solutions
to tough optimisation problems in a reasonable amount of time, but there is no guarantee that
optimal solutions are reached (Yang, 2010).Heuristic algorithms are characterised by some
balance between exploration (global search) and exploitation (local search).
Heuristic algorithms are preferred for problems that require good quality solutions which
are easily attained, rather than the best solutions. A heuristic algorithm is suited specifically
for the lane-changing concentration problem because the C-ITS advisory only requires a good
quality solution to improve the fitness function. This is more important than the guarantee of
an optimal solution because of the relatively high cost in computational effort, to attain the best
solution, compared to the marginal improvement in the fitness function.
Many modern heuristic algorithms that have been developed for computer science research:
for example simulated annealing, tabu search, genetic algorithms, ant colony optimisation, bee
algorithms, differential evolution, particle swarm optimisation, harmony search, big bang-big
crunch, the firefly algorithm, cuckoo search and bat-inspired algorithms.
Nature-inspired algorithms are based on the behaviour of so-called swarm intelligence,
which forms the foundation of heuristics (Yang, 2014). This research focuses on using swarm
intelligence models, mainly PSO, to solve the optimisation problem.

18 CHAPTER 2. LITERATURE REVIEW
2.3.1 Particle swarm optimisation
PSO, a heuristic algorithm, has become one of the most widely used algorithms based on swarm
intelligence due to its simplicity and flexibility (Yang, 2014). It is a stochastic search and
optimisation technique that has been applied to many problem domains which are difficult to
solve by conventional methods.
The PSO concept, originally introduced by Eberhart and Kennedy (1995), was inspired by
the social behaviour of bird flocking or fish schooling. In PSO, a problem is optimised by
iteratively trying to improve a potential solution with respect to an objective function. It solves
a problem by having a swarm of particles, or population of potential solutions, which are flown
in a high-dimensional search space. Each particle has an adaptable velocity, according to which
it flies through the solution space. The movement of the particle is updated according to its own
best position in history, and to the current global best position, which is found by the swarm,
at the same time it tends to move randomly. When a particle finds a location better than any
previously found, it updates that location as the new current best for the particle. The swarm of
particles is expected to fly toward an optimal solution through the feasible solution space.
The original PSO algorithm has two variants: global best, gbest, and local best, lbest, PSO.
The global variant, widely used in literature, is used in this research (Gopalakrishnan et al.,
2013). Hence, the following describes the global best PSO algorithm.
Consider aD-dimensional search space, where the ith particle of a swarm can be represented
by a D-dimensional vector, Xi = (xi1, xi2, . . . , xiD)T . The velocity of the particle can be
represented by a D-dimensional velocity vector Vi = (vi1, vi2, . . . , viD)T . The particle, xi, has
a memory of its previously visited personal best position, denoted as yi = (yi1, yi2, . . . , yiD)T .
The social information is the best position found by the swarm, referred to as y. Let t denote
discrete time steps or the iteration number. Each particle updates its position based on its own
best experience, the best swarm overall experience, and its previous velocity vector, according
to equations 2.1 and 2.2 (Eberhart and Kennedy, 1995).
vt+1ij = ωvtij + c1r
t1j(y
tij − xtij) + c2r
t2j(y
tj − xtij) (2.1)
xt+1ij = vt+1
ij + xtij (2.2)

2.3. HEURISTIC OPTIMISATION 19
where j = 1, 2, . . . , D; i = 1, 2, . . . , ns and ns is the size of the swarm. The stochastic nature
of the algorithm is determined by rt1j , rt2j ∼ U(0, 1), which are random values, sampled from
a uniform distribution in the range [0, 1]. These random numbers are scaled by acceleration
coefficients c1 and c2, called cognitive and social parameters, respectively, where 0 ≤ c1, c2 ≤ 2.
The performance of each particle is measured by the objective function, which is related to the
problem under consideration. The inertia weight ω was added by Shi and Eberhart (1998)
to improve the convergence rate. Gopalakrishnan et al. (2013) added a maximum velocity
parameter, vmax, to improve the efficiency of the PSO in the region of the optimum by allowing
a finer step-size velocity.
The termination criterion for the PSO can be one of the following: a fixed number of
iterations, the maximum number of iterations without improvement, and the minimum error
requirement in the objective function.
The swarm behaviour in basic PSO is influenced by the number of particles, the inertia
weight, the maximum velocity, and the acceleration coefficients to modify the velocity. These
parameters are considered for the speed, convergence and efficiency of the algorithm. The
influence of the previous velocity on the current velocity, which affects the trade-off between
exploration (global search) and exploitation (local search), can be controlled by the inertia
weight, ω. A larger inertia weight facilitates the exploration; a smaller inertia weight tends
to facilitate the exploitation of the current search area. Hence, a suitable selection of the inertia
weight achieves the right balance between exploration and exploitation (Shi and Eberhart,
1998).
There are several key advantages of PSO over other optimisation techniques: derivative-
free algorithm unlike many conventional techniques, only a few parameters to adjust, ability
to handle objective functions with stochastic nature, ease of implementation, does not require
a decent initial solution to start its iteration process (AlRashidi and El-Hawary, 2009). Since
its original development, PSO has been modified into many different variants (Gopalakrishnan
et al., 2013). As a heuristic algorithm, PSO does not guarantee to find the optimum solution;
therefore, the practitioner may need to modify the algorithm to work efficiently for a given
problem.

20 CHAPTER 2. LITERATURE REVIEW
2.3.2 Particle swarm optimisation: traffic and transportation engineering applications
Swarm intelligence techniques, including PSO, have been successfully applied for transporta-
tion and traffic engineering applications, including transportation network design, traffic flow
forecasting, traffic control, traffic accident forecasting and vehicle routing problem (Teodorovic,
2008; Gopalakrishnan et al., 2013).
Srinivasan and Seow (2003) proposed a new approach to automatic incident detection on
traffic highways using PSO. Their research used PSO to train a neural network in place of back-
propagation. The simulation results show that PSO performed better than the back-propagation
algorithm.
The vehicle routing problem with time windows accounts for a significant portion of the
work of many distribution and transportation systems. Zhu et al. (2006) developed an algorithm,
based on the principles of PSO, for the vehicle routing problem. The authors tested the proposed
approach on a few numerical experiments and compared the results with the results obtained
by the genetic algorithm approach. The PSO algorithm discovered optimal solutions in 82% of
cases, while the genetic algorithm discovered optimal solutions in 36% of cases. The simulated
results indicated that the PSO algorithm could efficiently and quickly achieve a resolution to the
vehicle routing problem.
Traffic flow forecasting is a key problem in the real-time adaptive control of urban traffic.
Zhao et al. (2006) proposed the radial basic function and neural network based forecasting
model for two adjacent intersections. They used PSO algorithm to optimise the hidden layer
and the output layer weights of the forecasting model. The proposed approach enhanced the
training speed and accuracy of the traffic flow forecast.
Chen and Xu (2006) proposed a PSO algorithm for solving the traffic optimisation prob-
lem by optimising the average delay and the average number of stops for adjacent junctions.
The simulation results showed that the delay per vehicle could be substantially reduced under
constant traffic demands and time-varying traffic demands.
Dong et al. (2006) proposed a chaos-PSO algorithm, which is a modified PSO algorithm
to allow chaotic searching, used to optimise the signal timing for urban area traffic control.
The experimental results for traffic networks consisting of nine intersections showed that signal
timing optimisation based on chaos-PSO could reduce average delay per vehicle by 41.6%.

2.4. SUMMARY 21
Wang et al. (2007) used a modified PSO for optimal coordination of the traffic signals in a
simulated artery system.
Peng et al. (2009) introduced isolation niches embedded in PSO for traffic lights control.
The proposed algorithm was used to optimise the time of green and red lights to make the
average waiting time for vehicles shorter. The simulation results showed that it was a valid
method.
Lianyu et al. (2009) proposed a method based on a quantum-behaved PSO algorithm to
obtain optimal origin–destination (OD) matrix calculation used in urban traffic management
and control.
Kachroudi and Bhouri (2009) proposed an urban traffic control strategy that uses traffic
lights to regulate private vehicle traffic and the progression of public transport vehicles. The
authors used a modified PSO algorithm to optimise the multi-modal traffic responsive strategy
on a large virtual urban network.
Cao et al. (2010) proposed a two-direction green wave control algorithm of the traffic signal
based on PSO. The PSO optimised the signal split and the phase offset. The simulation result,
using traffic data collected from Liansheng Road and Dongguan City, showed the method
significantly reduced average delay and average queue length.
Lertworawanich (2012) proposed a PSO algorithm for the sequential highway network re-
covery problems. The study used a model to determine the optimal highway network restoration
sequence after disasters.
These results from research have shown that the PSO is a promising technique capable of
solving complex traffic and transportation problems. As there have been few studies relating
to the use of PSO in freeway traffic control, this research aims to use PSO algorithm in the
lane-changing optimisation problem in a freeway weaving segment.
2.4 Summary
The literature review revealed that a bottleneck problem in freeway weaving segments, caused
by the lane-changing concentration of merging and diverging vehicles. Hence, the entire weav-
ing segment length is not effectively utilised.

22 CHAPTER 2. LITERATURE REVIEW
A C-ITS-based LC advisory for weaving segments was proposed by Mai et al. (2016) using
V2I communications. The LC advisory was shown to alleviate the lane-changing concentration
problem effectively by distributing lane changes along the weaving segment length. However,
the study did not investigate how to optimise the LC distribution. An appropriate optimisation
technique must be implemented to satisfy the constraints of the problem. PSO has been used
extensively in literature to optimise diverse problem sets with various constraints.
In short, although the C-ITS lane changing advisory for weaving segments has been shown
to improve the LC concentration problem, no optimisation technique has been applied to the LC
distribution. The heuristic PSO algorithm provides an opportunity to optimise the LC advisory
distribution.

Chapter 3
Methodology
3.1 Research design
This chapter describes the research methodology used to achieve the aims and objectives stated
in chapter 1 based on the information gleaned from the literature review in chapter 2. The
research methodology involves both the basic concept and assumptions of the C-ITS-based LC
advisory (section 3.2) and the proposed PSO algorithm used in this study (section 3.3). The
overall research design, in the following four steps, is shown in figure 3.1.
Step 1: Literature review (Chapter 2)
The first stage of the literature review focused on weaving segments: the factors influ-
encing their capacity, the driver behaviour and the traffic management techniques at these
segments. The second stage of the literature review gave an overview of C-ITS and its
applications. The third section focussed on heuristic algorithms and on the application of
PSO in traffic engineering problems. Briefly, the literature review:
• Provided evidence of a lane-changing concentration problem causing bottlenecks at
freeway weaving segments
• Provided an overview of C-ITS and an example of how a LC advisory, based on V2I
communications, could alleviate the weaving lane-changing concentration problem,
and
• Provided examples of heuristic optimisation in traffic engineering applications.
23

24 CHAPTER 3. METHODOLOGY
Chapter 2: Literature Review
Cooperative IntelligentTransport Systems:
Investigate how C-ITS canprovide advisory traffic
control at weaving segments
Weaving segments:Investigate lane-changing
concentration problem andtraffic control limitations
at weaving segments
Heuristic optimisation:Identify opportunity toimplement an algorithm
to optimise lane-changingadvisory distribution
Chapter 3: Methodology
Propose an algorithm, based on particle swarmoptimisation, to optimise the distribution
for the C-ITS-based lane-changing advisory
Chapter 4: Case Study
Microscopic traffic simulation platform with Aimsun:
1. Model test site
2. Simulate C-ITS advisory traffic control
3. PSO interface with simulation
4. Evaluate optimisation results
Python code withPSO-Aimsunconnection
CompareObjective function
Chapter 5: Conclusion
Summarise thefindings by answeringthe research questions
and recommendfuture works
Figure 3.1: Research methodology
Step 2: Methodology and proposed algorithm (Chapter 3)
The methodology firstly involved a C-ITS-based LC advisory in distributing lane chang-
ing along the weaving segment (see section 3.2), and secondly, involved an algorithm,
based on PSO, to optimise the LC advisory distribution (see 3.3).
Step 3: Case Study (Chapter 4)
A case study was designed to implement and evaluate the proposed strategy. The C-
ITS advisory was implemented in a microscopic traffic simulation software, Aimsun by
using an application programming interface (API) that connected with external Python

3.2. BASIC CONCEPT AND ASSUMPTIONS 25
scripts. The proposed PSO algorithm, coded in Python, was executed in an integrated
development environment.
The objective function was examined and chosen based on current literature revealed in
the review. The results were used to evaluate different tests; these tests were compared
with the base case (no intervention) and the optimised case. Chapter 4 presents the details
of this step. The evaluation of this case study revealed outcomes relevant for answering
the research questions.
Step 4: Conclusion and recommendations for future work (Chapter 5)
The final step of the research design was to present the research findings discovered in
answering the research questions. This step also identified and explained the research
limitations and gave recommendations for further research work (see chapter 5).
3.2 Basic concept and assumptions
In this research, a C-ITS advisory was considered (see figure 3.2). This strategy aimed to
distribute weaving vehicles over the existing infrastructure by advising them, via V2I commu-
nications, from which point they could start to change lanes. Hence, the strategy sought to
alleviate the LC concentration problem, caused by excessive LC activity close to the merge
gore, in a freeway weaving segment (see 3.2(b) in figure 3.2).
The C-ITS advisory relied on the following assumptions:
• The communication signal strength was 100% guaranteed.
• All vehicles were assumed to be equipped with 5.9 GHz DSRC.
• DSRC connectivity was available (commonly used for C-ITS projects (Green et al., 2014)).
• Each vehicle complies with the guidance provided by the advisory.
• Each vehicle is tracked by a RSU to identify its lane.
• Each vehicle’s origin and destination are known; thus, a weaving vehicle could be identi-
fied.
• Traffic is composed of cars only and does not consider the impact of heavy vehicles.

26 CHAPTER 3. METHODOLOGY
(a) Weaving segment configuration
(b) Lane-changing concentration problem zone
(c) Weaving segment divided into eight sections
Figure 3.2: One-sided weaving segment
The five steps applying the advisory control strategy (see figure 3.3) are discussed in further
detail below.
Step 1: Data Collection
In this step, the OD information of each vehicle was collected via V2I communications.
Assuming an RSU located upstream of the weaving segment, vehicles equipped with
C-ITS capability would send their OD path information.
Step 2: Vehicle movement group classification
The vehicles were classified into weaving and non-weaving groups based on their OD
information. For the non-weaving group, no further actions were required so they pro-
ceeded as usual.
Step 3: Weaving group classification

3.2. BASIC CONCEPT AND ASSUMPTIONS 27
Obtain vehicle OD information
Weaving vehicle?
Do nothingClassify
weaving vehicle
No Yes
Merging or diverging?
Mergingvehicle group
Divergingvehicle group
RF FR
Assign section 1 Assign section 2Assign
section . . .Assign section j
distribution %
Lane-changingfrom section 1
Lane-changingfrom section 2
Lane-changingfrom section . . .
Lane-changingfrom section j
Step 1:Collect data
Step 2:Classifyvehiclemovementgroup
Step 3:Classifyweaving group
Step 4: Assignsections forweavingvehicles
Step 5: Sendlane-changingadvisory
Figure 3.3: The process chart for the lane-changing advisory application
The weaving vehicles were classified into merging and diverging subgroups, based on
their OD information, to allocate separate LC distributions. Movements of merging and
diverging are referred to as ramp-to-freeway and freeway-to-ramp movements, respec-
tively.
Step 4: Assignment of sections for weaving vehicles
A section was assigned to each weaving vehicle, from which point they were permitted to
start to perform a lane change. In this study, the weaving segment was divided into eight
sections to simulate C-ITS control at a detailed level (see figure 3.2(c)). Considering the
simulation step of 0.8 seconds, eight sections with lengths of 50 m would be suitable for
a vehicle travelling at a speed of 100 km/h. For example, at 100 km/h, a vehicle travels a
distance of approximately 28 m/s or 22 m per simulation step. Hence, the length of each

28 CHAPTER 3. METHODOLOGY
section ensured vehicles would be captured during a simulation time step. It also ensured
that the distance travelled did not exceed the section length over a simulation time step.
As part of step 4, the LC distributions were used separately for the RF and FR vehicle
groups. Hence, a weaving vehicle is assigned section j, where j ∈ n sections, according
to the LC distribution of its weaving group, RF and FR respectively.
Step 5: Lane-changing advisory sent
Each vehicle was sent a LC advisory to indicate where they were permitted to commence
their lane change. The strategy was assumed to provide advisory control; thus, LC was
not forced. Instead, the C-ITS application advised drivers when to commence LC based
on their location. For example, vehicles assigned to section one were permitted to change
lanes when they entered the weaving segment with a suitable gap, whereas a vehicle
assigned to section five was advised not to change lanes until the fifth section in the
weaving segment. The advisory restricted the LC until the vehicle reached its assigned
section, at which point the Aimsun LC model governed the LC characteristics of the
vehicle (Barcelo, 2010).
The individual weaving vehicles received LC guidance in the form of an audio and
visual alert, as is commonly implemented in real-world C-ITS applications, such as those
reviewed by Kanazawa et al. (2010) in Japan. Figure 3.4, for example, shows an in-
vehicle visual display unit for C-ITS applications. The LC advisory application, for
example, would display two different messages, as appropriate:
• ‘Distance until lane change’ (countdown of the distance until the assigned section)
• ‘Seek gap and perform lane change’ (alerting the driver to commence a lane change
where a suitable gap is found)
The purpose of the advisory was to distribute lane changes along the weaving segment
length to better utilise the infrastructure. This was achieved by optimising the LC distributions
for RF and FR vehicles in step 4. The actual LC behaviour may differ in a real-world scenario.

3.3. PROPOSED OPTIMISATION ALGORITHM 29
Figure 3.4: In-vehicle visual display unit (Transport for NSW, 2015)
3.3 Proposed optimisation algorithm
In a previous study by Mai et al. (2016), the distribution percentage was fixed, and optimal
solutions were not explored using sophisticated optimisation techniques. This study involves
particle swarm optimisation to seek optimal solutions for the LC advisory distribution.
A methodology for the optimisation of the LC advisory distribution is proposed in this
section. The proposed algorithm is discussed in further detail below.
Table 3.1 summarises the notations used in this section.
The basic PSO algorithm (summarised in algorithm 1) needed to be modified to handle
the constraints in the optimisation problem. Accordingly, section 3.3.1 provides the proposed
extension to the basic PSO.
3.3.1 Proposed PSO
The PSO algorithm was modified to generate solutions for the LC advisory distribution. Genetic
algorithms were attempted for this problem, but the crossover and mutation functions proved
difficult when dealing with the given constraints. Conversely, PSO could iteratively improve
each decision variable in the potential solution while remaining within the feasible search space.
Hence, a PSO algorithm was proposed for this problem because the fitness evaluations could be
used to guide the search directly (Paquet and Engelbrecht, 2003). Because the problem could be
defined as a continuous optimisation problem with constraints, PSO was a suitable algorithm.

30 CHAPTER 3. METHODOLOGY
Table 3.1: Notations of parameters and variables
PSO parametersf(x) Function to minimiseS Total number of particles in the swarmD Number of dimensions in a particlei Index for particle in swarm, Sj Index for dimension in particle, xixi Particle representing a potential solution, xi ∈ <n
xlb Lower bound limit for xijxub Upper bound limit for xijω Inertia weight, ω = 0.7
φp Cognition parameter, φp = 1.4
φg Social parameter, φg = 1.4
vi(t) Velocity vector, vi ∈ <n
vc Velocity clamping, vc = 0.2
Objective FunctionS Minimum detector speedM Missed turns penalty factor
Algorithm 1: The pseudocode of basic particle swarm optimisationInput: PSO parametersResult: The best particle found by the algorithm.
1 for each particle i = 1, . . . , ns do2 Initialise particle’s position and velocity3 end4 while maximum iterations or stopping criteria is not met do5 for each particle i = 1, . . . , ns do6 Calculate fitness value7 if the fitness value is better than the best fitness value (pbest) in history then8 pbest = fitness value9 end
10 end11 Choose the particle with best fitness value of all the particles as the gbest12 for each particle i = 1, . . . , ns do13 Calculate particle velocity according to equation 2.114 Update particle position according to equation 2.215 end16 end
The proposed PSO, for a constrained optimisation problem, has been adapted to search
within the feasible solution space. Constraints, in heuristic algorithms, may cause the search
to compromise on the optimal solution by just seeking a feasible solution Coello and Montes

3.3. PROPOSED OPTIMISATION ALGORITHM 31
(2002). So the PSO algorithm needs a mechanism to deal with the constraints of the problem
while maintaining its focus on optimisation.
PSO proved to be a useful algorithm to optimise unconstrained functions; however, if some
constraints were added to the objective function, the problem became more complicated (Paquet
and Engelbrecht, 2003). A modified PSO algorithm was developed specifically to include the
constraints in the optimisation problem. The following sections outline the modifications to the
basic PSO.
3.3.2 Solution representation
To optimise the LC-advisory distribution, the potential solution must be encoded in a suitable
form, such as a one-dimensional array jointly comprising the RF and FR LC advisory distribu-
tions. Figure 3.5 depicts a simple potential solution.
RF FR
xRF1 xRF2 xRF3 xRF4 xRF5 xRF6 xRF7 xRF8 xFR1 xFR2 xFR3 xFR4 xFR5 xFR6 xFR7 xFR8
Figure 3.5: Solution representation
3.3.3 Co-evolutionary optimisation
A decomposition approach was implemented to improve the potential solution iteratively. The
proposed PSO improved the potential solutions by improving the lane-changing advisory dis-
tribution made up of the RF and FR distributions.
Figure 3.6 provides an example of the steps for this co-evolutionary optimisation approach.
Assume there is a swarm size of ten particles, each with 16 decision variables, each column
representing one dimension (one decision variable); the swarm of solutions (particles) will be a
matrix of D × S (16× 10), as shown in step 1. In the matrix, each row represents one solution
(particle), the columns represent the set of decision variables. The initial population is randomly
generated within the predefined constraints.
The set of decision variables is divided into the RF and FR subset arrays in step 2; these are
denoted by the yellow and green colour, respectively. The size of each subset is D/2 (16/2 =
8), that is, each subset contains 8 decision variables represented by columns and ten particles
(solutions) represented by rows.

32 CHAPTER 3. METHODOLOGY
Decision variables 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Ind
ivid
ual
s
1
2
3
4
5
6
7
8
9
10
Global decision
variable index
Local decision
variable index
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
Ind
ivid
ua
ls
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
PSO PSO
Fitness Individual Fitness Individual
Solution vector
STEP
1
STEP
2
STEP
3
STEP
4
Figure 3.6: Co-evolutionary optimisation method

3.3. PROPOSED OPTIMISATION ALGORITHM 33
The solution vector, created in step 3, is used for the fitness calculation process. The solution
vector contains two parts selected from the created subsets, as shown in step 3. In this example,
the RF distribution is selected from the first subset array; the FR distribution is selected from
the second subset. Each part represents the best solution in its subset. For example, after an
iteration, the best solution in the first subset is Individual 5 (highlighted by a black colour),
which is used to represent the first part of the solution vector, and Individual 2 from the second
subset is used to represent the second part of the solution. Every particle (individual) in a
subset is evaluated by combining it with all the best individuals in the solution vector. That
is, the solution vector is fed into the objective function for fitness calculation. This is the co-
evolutionary process for the PSO algorithm. For example, to calculate the fitness values of all
particles in the first swarm, each particle from the first subset is sent to be used as the first
part, combined with the second part of the FR subset, and then it is sent to the fitness function
to calculate the fitness value of this particle. The same process is repeated for the RF subset.
The parts – the best individuals in each subset of the solution vector – are updated during the
optimisation process.
The optimisation process (PSO) is called in step 4 to solve each subset separately. Each PSO
operates on each subset of solutions and, during the optimisation process of PSO, the fitness
value of the newly generated solution are calculated by sending it into the solution vector. The
same process is repeated for the second subset.
Figure 3.7 shows the PSO cycle used to solve the two subsets (denoted as Swarm 1 and
Swarm 2). In the first cycle, the PSO process for Swarm 1 is executed, while the representative
(global best) from Swarm 2 is sent to form the second part of the solution vector. During the
first cycle, the PSO sends each particle into the solution vector and obtains the fitness value.
The first cycle will terminate after all particles in Swarm 1 have been evaluated. The search
then executes the second cycle to optimise Swarm 2 and uses the representative (global best)
from Swarm 1 in the solution vector. Once the second cycle terminates, the search repeats the
cyclical process. The process iteratively improves the search for the best solution by updating
the current best particle of each swarm.

34 CHAPTER 3. METHODOLOGY
PSO
Population
Swarm 1
PSO
Population
Swarm 2
Solution vectorCycle 1
particle
fitness
representative
PSO
Population
Swarm 1
PSO
Population
Swarm 2
Solution vector Cycle 2
particle
fitness
representative
Figure 3.7: PSO cycle process
3.3.4 Initialisation
The potential solutions were randomly initialised within the feasible domain. The particle’s
position was initialised using equation 3.1; it was then transformed within the feasible domain
using equation 3.2.
xij = xlb + rij × (xub − xlb), ∀j = 1, . . . , nx, ∀i = 1, . . . , ns (3.1)
where rij ∼ U(0, 1) and xij is the position of x for j in nx dimensions and i in ns particles. The
random variable, rij , is uniformly distributed between 0 and 1. The lower and upper bounds of
position xij are xlb and xub, respectively.
x′ij =xij∑nx
j=1 xij, ∀j = 1, . . . , nx, ∀i = 1, . . . , ns (3.2)
where x′ij is the transformed position, within the feasible space, of x for j in n dimensions and i
in S particles. For all j in n dimensions, the position is divided by the sum of values in particle
i. This post-processing method was used to initialise positions within the feasible domain.
3.3.5 Objective function
The problem can be defined as a constrained numerical optimisation problem that seeks to
find x, which minimises f(x). This section describes the objective function formulation. The
proposed PSO algorithm inputs the LC advisory distribution, x, into Aimsun, which outputs

3.3. PROPOSED OPTIMISATION ALGORITHM 35
the fitness evaluation (see figure 3.8). The problem will be optimised by iteratively trying to
improve a potential solution for the objective function.
Start
Initise PSOparameters
Generaterandom swarm
of particles
Evaluate thefitness of
all particles
Aimsun R©
Input: x
Output: f(x)
Record personalbest fitness ofall particles
Find globalbest particle
Termination criteria met?
Stop
Yes
Update thevelocity ofparticles
Update theposition of
particles
No
Figure 3.8: The flowchart of PSO
In this work, the objective function consisted of two parts: speed and missed turns. The
speed was measured in the conflict area of the weaving segment, where most of the turbulence
typically occurred due to merging and diverging traffic streams. In this study, the auxiliary
lane and lane 3 experienced the most LC turbulence between merging and diverging vehicles;
consequently, speed along these lanes was used as an indicator of traffic flow dynamics, how
smoothly vehicles drove through the segment. The speed was measured by detectors that were
spaced at 10-m intervals. This study used 1-minute aggregation for all detector measurements.

36 CHAPTER 3. METHODOLOGY
The detector with the minimum speed measurement would represent the point where speed
drop was most significant. Denny and Williams (2005) found that the speed would be the
lowest close to the merge gore areas where the maximum interaction between merging and
diverging vehicles occurred because of the bottleneck formation. Hence, regarding the objective
function, it was pertinent to increase the minimum speed and to reduce speed drop caused by a
LC concentration. The minimum speed, measured at a detector, would be substituted into the
objective function.
Missed turns occurred when a weaving vehicle was unable to perform its required lane
change before the end of the segment; thus, missing its desired turn or exit leg. This tended
to occur when vehicles were assigned a section close to the end of the diverging point, and no
suitable gap was found to change lanes. This is undesirable for drivers and should be avoided.
Hence, in this study, missed turns have been penalised by a factor, M , shown in equation 3.4.
The LC distribution was optimised based on the objective function, summarised in equation
3.3. The free-flow speeds for the freeway and on/off ramps were 100 km/h and 80 km/h,
respectively.
min f(x) =1
S+M (3.3)
where f(x) is the objective function for a given LC distribution, xi, S is the value derived from
the speed detector measurements, and M is the penalty factor for the number of missed turns.
M is a weighted penalty factor that is expressed as:
M = N +m2 (3.4)
where N is a user-defined constant and m is the number of missed turns. The number of missed
turns, m, is defined as the number of vehicles that are unable to find a gap in time to proceed
to their desired exit. The factor has been squared to increasingly penalise this undesirable
outcome.
The proposed PSO was used to improve the LC concentration problem by optimising the
LC advisory distribution.

3.3. PROPOSED OPTIMISATION ALGORITHM 37
3.3.6 Constraints
The optimisation problem includes both boundary and summation constraints. These set of
constraints is imposed by conditions that the variable, x, must satisfy to find a feasible solution.
These constraints are presented in equations 3.5 and 3.6.
nx∑j=1
xij = X, ∀i = 1, . . . , ns (3.5)
where X is the value for feasible solutions, as defined by the linear constraint on the LC-
advisory distribution.
xlb ≤ xij ≤ xub, ∀j = 1, . . . , nx, ∀i = 1, . . . , ns (3.6)
where xlb and xub are the lower and upper bound values, respectively.
3.3.7 Velocity
The basic PSO algorithm updated the position of its particles with a velocity equation that was
unconstrained. A constraint handling mechanism was used to guarantee a feasible solution.
The basic velocity equation was implemented, then a constraint-preserving method was
applied to ensure that the particle’s position satisfied the constraints. In this process, where
decision variables have violated the boundary constraint, the violation was discretely distributed
across dimensions which may satisfy the boundary constraint.
Velocity clamping was also implemented to control the exploration of particles within the
boundary constraints. If a particle’s velocity exceeded the specified maximum velocity, the
particle’s velocity was set to the maximum velocity (Engelbrecht, 2007).
3.3.8 Position
Based on the calculated velocity, the updated position remains within the feasible domain. The
positions of all particles are updated using equation 2.2.

38 CHAPTER 3. METHODOLOGY
3.3.9 Termination criteria
Iterations of the algorithm are executed until a stopping condition is satisfied. In this work, the
criterion was set to a maximum of 50 iterations.
3.4 Summary
This chapter presented the methodology used in the study. The case study and simulation results
are presented in chapter 4.

Chapter 4
Case Study
This chapter covers the microscopic traffic simulation set-up, including the network configu-
ration and simulation settings; the performance indicators used for evaluation; and finally, the
results and discussions.
4.1 Simulation test bed
Traffic simulation has been used to evaluate the application of the C-ITS lane-changing advisory
and the implementation of the optimisation algorithm.
The model was built using a commercially available microscopic traffic simulation software,
AIMSUN (advanced interactive microscopic for urban and non-urban network), which was
developed by Transportation Simulation Systems (TSS) in Spain (Barcelo, 2010). Aimsun con-
tains a microscopic simulator and offers an API with its microsimulation software. This study
used the API, which enables Aimsun to interface with external applications, the development
language Python, and version 8.1.5 of Aimsun.
The simulation period is 15 minutes, with a 10-minute warm-up period. Each test scenario
runs 20 replications to capture the stochastic variation in traffic flow. The average of the 20
simulation runs was used for output analysis.
An empirical study, by (Al-Jameel, 2013), examined the characteristics of driver behaviour
in weaving segments using field data extracted from video recordings of seven motorway weav-
ing sites. This study used the existing network based on the M60 Motorway (Manchester City,
UK). This segment was coded in a previous study by Mai et al. (2016).
39

40 CHAPTER 4. CASE STUDY
(a) M60 Motorway aerial image
(b) M60 Aimsun network
Figure 4.1: M60 Motorway test bed
The network, a short weaving segment with a length of 400 m, has a width of four continu-
ous lanes: three freeway-to-freeway lanes and a one-lane, left-side on-ramp, followed closely by
a one-lane, left-side off-ramp. The two ramps are connected by a continuous freeway auxiliary
lane. The configuration, defined as a one-sided weaving segment, requires no more than two
completed lane changes. The speeds are coded as 100km/h and 80km/h for the freeway and
ramp sections, respectively. The geometry of the weaving segment is shown in figure 4.1
(considering left-hand side traffic direction).
The demand data for the weaving segment were taken from study by Al-Jameel (2013). The
model, which considered only cars in its traffic composition, had the following demand flow
rates:
• FF demand flow: 5300 veh/h
• RF demand flow: 900 veh/h
• FR demand flow: 900 veh/h
• RR demand flow: 100 veh/h
The model calibration and validation processes were undertaken in a previous study by Mai
et al. (2016). In their study, they calibrated the lane-changing model by adjusting the ‘distance
to zone’ parameters, which represented the lane-changing motivation characteristics. Their
model, which uses the observed data from an empirical study by Al-Jameel (2013), calibrates
and validates the high lane-changing concentration problem to represent weaving behaviour
accurately. Hence, their model can be used reasonably for a comprehensive analysis of different
test scenarios. Table 4.1 lists the parameters describing the weaving segment.

4.2. PERFORMANCE INDICATORS 41
Table 4.1: Weaving segment parameters
vFF = freeway-to-freeway flow rate in the weaving segment(veh/h)
vRF = ramp-to-freeway flow rate in the weaving segment (veh/h)vFR = freeway-to-ramp flow rate in the weaving segment (veh/h)vRR = ramp-to-ramp flow rate in the weaving segment (veh/h)vW = weaving demand flow rate in the weaving segment
(veh/h), vW = vRF + vFR
vW = weaving demand flow rate in the weaving segment(veh/h), vNW = vFF + vRR
v = total demand flow rate in the weaving segmnet (veh/h),v = vW + vNW
N = number of lanes within the weaving segment, N = 4
L = length of the weaving segment (m), L = 400
RF-ratio = ramp-to-freeway volume ratio, vRF /vW
4.2 Performance indicators
Performance indicators, or measures of effectiveness, need to be carefully chosen to evaluate
the weaving segment. Average speed is commonly used as an operational indicator; however,
Cassidy and May (1991) found that it does not reliably reflect operational quality in a weaving
segment. Cassidy et al. (1989) observed that speed appears to be insensitive to low and moderate
conditions. Denny and Williams (2005) found that the speed would be the lowest close to the
merge gore areas, where the maximum interaction between merging and diverging vehicles oc-
curred because of the bottleneck formation. The speed would increase once the vehicles moved
through the bottleneck location. Hence, speed will not be used as an operational performance
indicator in this research. Instead, speed will show the traffic flow dynamics, how smoothly
drivers travel through the weaving segment and whether the LC concentration problem has
been alleviated.
Detectors, spaced at 10m intervals, collected speed measurements. This research used 1-
minute aggregation for all detector measurements. The detector speed measurements can be
used to show the speed profile along the weaving segment and to plot the speed contours.
Two performance indicators were used to evaluate the weaving segment and to compare the
optimised case and the base case: average vehicular delay and time savings.
Aimsun recorded the average delay, calculated as the difference between the actual travel

42 CHAPTER 4. CASE STUDY
time and the free-flow travel time. The free-flow travel times of the mainline vehicles (FF and
FR) and the on-ramp vehicles (RF and RR) were calculated at speeds of 100 km/h and 80 km/h
for the freeway lanes and ramps, respectively. For mainline vehicles, the actual travel time was
recorded from 500 m upstream of the merge gore to downstream of the weaving segment. For
on-ramp vehicles, the travel time is recorded from 130 m from the merge gore to downstream
of the weaving segment. The unit of average delay time was measured in seconds per vehicle
(s/veh). The time saving (s/veh) was used, as another performance indicator, to indicate the
travel time savings achieved by the advisory control strategy.
4.3 Evaluation of the proposed PSO algorithm
This section gives an example that demonstrates the performance of the proposed PSO.
The proposed PSO has been modified to handle the constraints of the problem; however,
the input parameters are the same as those of the basic PSO. The proposed PSO follows the
methods defined in section 3.3.
In all experiments, the inertia weight, ω, was set to 0.7, while the values of φp and φg were
set to 1.4. When comparing the inertia weights and constriction factors in PSO, Eberhart and
Shi (2000) found that these values gave acceptable results. The velocity clamping (vc) used was
0.2 (higher values were tested; however, this value provided the best results).
The objective function was defined in section 3.3.5. Function evaluations were performed
by passing the potential solution, x, into Aimsun and obtaining a fitness value, f(x). The test
example minimises equation 3.3, subject to the constraints in equation 3.5.
Table 4.2 lists the swarm sizes tested to evaluate the performance proposed PSO.
Table 4.2: Proposed PSO test runs
Run Number of particles
Run A 10Run B 20
Figure 4.2 shows the best fitness values (averaged over five simulations). The results show
how the proposed PSO algorithm converges near a local minima. Run A converges after
approximately 40 iterations, whereas Run B converges after 30 iterations.

4.3. EVALUATION OF THE PROPOSED PSO ALGORITHM 43
Figure 4.2: Proposed PSO results
Table 4.3 shows the best fitness values at the final iteration (over five simulations). The table
also shows the maximum and minimum fitness values at the final iteration, over five simulations.
In this example, the results show that the swarm size has a marginal difference to the final fitness
value. Hence, to save on computational time, a swarm size of ten was used for all simulation
runs.
Table 4.3: Fitness values
Proposed PSO Run A Run B
Average 67.31 66.14Maximum 71.15 73.26Minimum 63.18 59.79Standard Deviation 2.78 5.33
The test example was also used to evaluate the effect of the penalty factor. Initially, the
penalty factor was set to zero, meaning that missed turns were not punished in the objective
function. The results were as expected, showing that the best LC advisory distribution did not
advise vehicles in time to allow them to execute their desired lane change; an average of 25

44 CHAPTER 4. CASE STUDY
vehicles missed their exit. When the penalty factor was applied to the objective function, there
were no missed turns for the best LC advisory distribution. The penalty factor is therefore
imperative to the objective function, to avoid vehicles missing their exits. In this study, the
sensitivity for the penalty factor was not investigated.
The results demonstrate that the proposed PSO algorithm can be reasonably used to optimise
the LC advisory distribution.
4.4 Simulation results and discussion
In this section, the performance of the advisory control strategy was evaluated based on the
simulation results. The proposed PSO algorithm found the best LC-advisory distributions. The
PSO code was executed using Spyder (The Scientific PYthon Development EnviRonment) on
an Intel R© CoreTM i7 2.50 GHz processor with 8.0 GB RAM, running on Windows 10, 64-
bit Operating System. The computing times for each PSO experiment was approximately six
hours. There was no focussed attempt to improve the efficiency of the algorithm for this study.
The best LC advisory distribution, obtained from the proposed PSO algorithm, will be
compared with the base case, with no control strategy. To test the strategy, the results are
evaluated between the following two cases:
• Base case: no control
• Optimised case: C-ITS advisory control strategy (optimised LC advisory distribution)
The base case assumes no control strategy. The LC behaviour is governed by Aimsun’s
LC model using the calibrated LC parameters. The base case was used as a benchmark for
comparison.
The advisory control strategy divides the 400-m weaving segment into eight equal 50-m
sections. The RF and FR vehicles are assigned a section, from which they can begin a lane
change. In the optimised case, the best LC advisory distribution, found by the proposed PSO
algorithm, is applied to the C-ITS advisory control strategy.

4.4. SIMULATION RESULTS AND DISCUSSION 45
4.4.1 Performance evaluation
The test bed, described in Section 4.1, was used as an example to evaluate the performance of
the proposed PSO algorithm in optimising the LC advisory distribution. Section 4.1 summarised
the traffic demand used for the test case.
Table 4.4 shows a comparison between the average delay time per vehicle (s/veh) in the
base case and the optimised case. The optimised case shows a substantial delay improvement
of 30% and 34% for the FF and FR movements, respectively. The delay improvement was 8%
and 1% for the RF and RR movement, respectively. On average, for all movements per vehicle,
delay significantly improved by 28%.
Table 4.4: Average delay comparison between base case and optimised case
Movement FF FR RF RR Average
Traffic volume (veh) 5300 900 900 100Expected travel time (s/veh) 52.9 47.1 43.0 37.1Delay in base case (s/veh) 12.8 16.5 9.8 5.2 8.8Delay in optimised case (s/veh) 8.9 10.8 9.0 5.1 6.3Improvement from base case (%) 30 34 8 1 28Significance∗ 0.000 0.000 0.000 0.787
*The delay difference is significant at the 0.05 level
The t-test was performed to examine whether the delays for the base case and the optimised
case were statistically different. The t-test showed that the optimised LC advisory significantly
reduced delay for the FF, FR and RF movements in the weaving segment. The difference in
delay for the RR movement was not significant.
The average speed over distance was used to show the location of speed drop caused by the
LC concentration problem. Figures 4.3(a) and 4.3(b) shows the speed over the auxiliary lane and
lane 3 distances, respectively. As clearly demonstrated in both graphs, the speed profile from
the optimised case shows a considerable reduction in speed drop near the merge gore, which
implies that lane changing was effectively distributed along the weaving segment. The base
case speed profile shows that speed increases after the speed drop, as vehicles move through
the bottleneck location. It is more desirable, with respect to the operational performance, to
have a smoother speed curve. Regarding traffic safety, crashes are more likely to occur during
high deceleration (high-speed drop) and less likely to occur during constant speed (Lee et al.,
2006). A higher speed difference increases the crash risk, as drivers may have a rear-end crash

46 CHAPTER 4. CASE STUDY
if distracted or unable to react in time (Wang et al., 2015). Hence, a smoother traffic speed
dynamic, which was achieved by the optimised case, is more desirable.
(a) Speed on auxiliary lane
(b) Speed on lane 3
Figure 4.3: Speed profile on critical weaving lanes
It can be observed from the simulation analyses that the advisory control strategy, which
uses the best LC advisory distribution found by the proposed PSO algorithm, improves the
minimum speed at the bottleneck location. This indicates that the proposed algorithm and
objective function can be used to optimise the LC advisory distribution and, hence, to improve
the operational performance of the weaving segment.

4.4. SIMULATION RESULTS AND DISCUSSION 47
4.4.2 Impact of different OD demands
This section investigates the impact of different OD demands on the LC distributions. The
criteria for OD demand selection, for each scenario, were that the:
• maximum weaving flow of either RF or FR does not exceed 1260 veh/h
• maximum number of passenger cars in the weaving segment is 2200 veh/h/lane.
The tests were conducted using five different OD demands, as shown in table 4.5. The five
OD demands have different RF-ratios, where the FF , RR and total weaving volumes remained
the same as in section 4.4. The level of service (LOS) in each scenario was E, according to
HCM 2010, chapter 12 (TRB, 2010), which indicates that the weaving segment is approaching
congestion – where the demand flow rate exceeds the capacity of the segment. HCM 2010
(TRB, 2010) does not distinguish LOS for different RF-ratios.
Table 4.5: Different demand setting (veh/h)
Test vRF vFR vFF Total weaving vRR RF ratio
A 540 1260 5300 1800 100 0.3B 720 1080 0.4C 900 900 0.5D 1080 720 0.6E 1260 540 0.7
The proposed algorithm was used to optimise the LC advisory distribution for the different
OD demands. PSO, considered a heuristic algorithm, does not guarantee a unique solution for
the optimal LC advisory distribution. However, the optimised LC advisory distribution aims
to change the behaviour of the weaving vehicles to alleviate the LC concentration problem by
better utilising existing infrastructure and thereby improving the operational performance of the
weaving segment.
Figures 4.4 and 4.5 show the performance improvement in lane 3 and the auxiliary lane,
respectively. These figures consist of sub-figures, in which the RF-ratio increases from bottom
to top, and the base case and optimised case are shown on the left and right, respectively. For
each sub-figure, the horizontal and vertical axes represent the distance (m), from the merge gore,
and time (min), respectively. The shading illustrates the average speed measured over time and

48 CHAPTER 4. CASE STUDY
distance; the darker shade represents slower speeds and the lighter shade, faster speeds. The
following observations have been made from figures 4.4 and 4.5:
1. Overall, the optimised case, in each scenario, has a lighter shade in the contour plots,
which represents faster speeds along the weaving segment in lane 3 and auxiliary lane,
relative to the respective base case.
2. The bottleneck location in the base case, represented by the dark band concentrated near
the merge gore, is alleviated in the optimised case. In all optimised cases, the speed is
more smoothly distributed across the weaving segment.
3. The gradient of the contours are less steep in the optimised cases than that in the base
cases, where the contours are concentrated near the merge gore.
4. In the base case, the speed decrease near the merge gore, caused by the lane changing
concentration problem, progressively becomes more severe as the RF-ratio increases.
5. The optimised cases perform better in smoothing the speed over the weaving segment.
The contour plots demonstrate that the optimised LC advisory considerably improves
how smoothly drivers travel through the weaving segment.

4.4. SIMULATION RESULTS AND DISCUSSION 49
0.7
0.6
0.5
0.4
0.3
RF-
ratio
Base case Optimised case
Figure 4.4: Contour speeds of lane 3

50 CHAPTER 4. CASE STUDY
0.7
0.6
0.5
0.4
0.3
RF-
ratio
Base case Optimised case
Figure 4.5: Contour speeds of auxiliary lane

4.4. SIMULATION RESULTS AND DISCUSSION 51
Figure 4.6 shows a bar chart that compares the average delay, for all vehicles, between
the base case and the optimised case. The line graph, on the same figure, shows the delay
improvement for each scenario. The base case (cross-hatched) indicates that the minimum
average delay was 8.8 s/veh, with an RF-ratio of 0.4. The maximum average delay was 13.7
s/veh, with an RF ratio of 0.7, where the RF movement is greatest at 1260 veh/h. As the
RF-ratio increases from 0.5 to 0.7, the average vehicular delay significantly increases. This
indicates that as the RF demand flow rate increases, in proportion to the total weaving flow, the
LC concentration problem is exacerbated. Since the LC activity tends to be concentrated close
to the merge gore, the heavier RF movement will change lanes into a congested lane 3, adding
to further congestion; whereas, the heavier FR movement, the RF-ratio of 0.3, will change lanes
into the auxiliary lane, where the lane volume is comparatively less. This behaviour, explained
by Lee et al. (2006), shows that FR vehicles are more likely to diverge close to the merge gore
area if the RF ratio is low. Hence, the delay caused by the LC concentration problem is not as
substantial as in the higher RF-ratios.
The average delay results for the optimised case are more stable than those for the base
case, across all RF-ratios. The delay improvement, in the optimised case from the base case,
increases with the RF ratio. The maximum delay improvement was 55.3% when the RF-ratio
was 0.7. The results will be further explained for the application domain analysis in Section
4.4.4.
Figure 4.6: Average delay results

52 CHAPTER 4. CASE STUDY
4.4.3 Sensitivity analysis
This section investigates the impact of various traffic patterns on the weaving segment operation.
Further sensitivity analyses were conducted to identify the improvement in the capacity of the
advisory control strategy. The tests considered 27 scenarios: three levels across three variables.
Firstly, three levels for the RF-ratio, namely 0.3, 0.5, and 0.7; three levels for the FF volume
(vFF ), namely, 5300, 4100, and 3250 veh/h; and, thirdly, three levels for the weaving volume
(vW ), namely, 1800, 1200, and 600 veh/h. Table 4.6 defines the levels and variables selected for
the sensitivity tests. Here, the tests will be identified according to the level of each variable. For
example, Test ID 321 has the following traffic pattern properties: RF-ratio = 0.7, vFF = 4110
veh/h, and vW = 1800 veh/h.
Table 4.6: Traffic demand
Level RF −ratio∗ vFF† (veh/h) vW
‡ (veh/h)
1 0.3 5300 18002 0.5 4110 12003 0.7 3250 600
* First, † second and ‡ third variable
Figures 4.7 and 4.8 show the speed over distance on the critical weaving lanes, the auxiliary
lane and lane 3, respectively. The graphs are clustered by weaving volumes (vW ), level 3 (low),
2 (medium) and 1 (high), from top to bottom. The graphs show a comparison between the base
case (left) and optimised case (right). The following observations can be made from figures 4.7
and 4.8:
1. Overall, the optimised LC advisory distribution (optimised case) improves the speed
profile along the critical weaving lanes. The improvement is more pronounced when
the weaving volume is high. Noticeably, the intense speed drop in the base case (high
vW ) is dissipated substantially in the optimised case.
2. Speed drop tends to occur because of a high density of LC at the start of the weaving
length; consequently, it is intensified by greater weaving volumes. Although improve-
ments can be observed for all tests, the advisory control strategy obtain better results
when the weaving volume is high.
The speed profiles are not intended to measure the operational effectiveness. The optimised

4.4. SIMULATION RESULTS AND DISCUSSION 53
cases show that the LC concentration problem has been alleviated successfully; achieving
smoother speed distributions. A throughput analysis did not reveal any improvement.

54 CHAPTER 4. CASE STUDY
(a) Base case – speed auxiliary lane low vW (b) Optimised case – speed auxiliary lane low vW
(c) Base case – speed auxiliary lane medium vW (d) Optimised case – speed auxiliary lane medium vW
(e) Base case – speed auxiliary lane high vW (f) Optimised case – speed auxiliary lane high vW
Figure 4.7: Auxiliary lane speed

4.4. SIMULATION RESULTS AND DISCUSSION 55
(a) Base case – speed lane 3 low vW (b) Optimised case – speed lane 3 low vW
(c) Base case – speed lane 3 medium vW (d) Optimised case – speed lane 3 medium vW
(e) Base case – speed lane 3 high vW (f) Optimised case – speed lane 3 high vW
Figure 4.8: Lane 3 speed

56 CHAPTER 4. CASE STUDY
Figures 4.9 and 4.10 shows the cumulative LC distributions, for all tests, for the base case
and optimised case, respectively. Figures 4.9(a) and 4.9(b) shows the cumulative LC distribution
for FR and RF vehicles in the base case, respectively. Similarly, Figures 4.10(a) and 4.10(b)
shows the cumulative LC distribution for FR and RF vehicles in the optimised case, respectively.
(a) FR Lane-changing distribution (b) RF Lane-changing distribution
Figure 4.9: Lane-changing distributions (Base case)
(a) FR Lane-changing distribution (b) RF Lane-changing distribution
Figure 4.10: Lane-changing distributions (Optimised case)
The following observations can be made about the cumulative LC distribution of weaving
vehicles over the weaving segment length:
• For all test scenarios, in the base case, a majority (over 80%) of lane changes occur
in the first 100m section of the available 400m weaving length. This causes the LC
concentration problem (described in section 2).

4.4. SIMULATION RESULTS AND DISCUSSION 57
• In the optimised case, the cumulative LC distribution for FR vehicles shows a distinctive
curve, which is more distributed along the weaving length.
4.4.4 Application domain analysis
This section identifies the application domain of the optimised LC-advisory distribution. All
the model parameters are kept the same as in section 4.4.3. The LC-advisory distribution was
optimised for each scenario. The executed lane changes of weaving vehicles will be analysed
for the optimised LC advisory to observe what effect the strategy has on drivers. Before this
analysis, the number of lane changes, per section, is examined for the base case (see in table
4.7).
Table 4.7: Lane-changing distribution (Base case)
RF-
ratio
0.7RF 882 302 50 13 0 0 0 0FR 378 124 27 5 0 0 0 0Total 1260 427 77 18 0 0 0 0
0.6RF 594 400 54 11 0 0 11 0FR 432 223 43 7 0 0 0 0Total 1026 623 97 18 0 0 11 0
0.5RF 378 432 72 9 0 9 0 0FR 495 324 63 9 9 0 0 0Total 873 756 135 18 9 9 0 0
0.4RF 230 403 72 7 0 0 0 0FR 626 356 76 11 0 0 0 0Total 857 760 148 18 0 0 0 0
0.3RF 162 308 59 5 0 0 0 0FR 806 340 76 13 13 0 0 0Total 968 648 135 18 13 0 0 0
1 2 3 4 5 6 7 8Section
From the LC distributions in the base cases, the following observations have been made:
1. The majority of lane changes occur in the first two sections (0-100 m) of the weaving
segment.
2. The dominant weaving demand flow movement dominates the number of lane changes in
the first segment (0-50 m).
3. The last five sections (150-400 m) of the weaving segment are severely underutilised in
all scenarios.
In contrast to the base case, the optimised LC advisory aims to change the LC behaviour of
weaving vehicles to achieve better utilisation and to improve the performance of the weaving

58 CHAPTER 4. CASE STUDY
segment. The simulation records the executed number of lane changes for the optimised LC
advisory (see table 4.8). The number of lane changes per section is recorded for RF and FR
vehicles.
Table 4.8: Lane-changing distribution (optimised case)R
F-ra
tio
0.7RF 88 139 340 239 63 113 202 76FR 235 207 72 18 5 2 1 1Total 323 345 412 257 68 116 203 76
0.6RF 108 184 43 119 140 184 227 76FR 301 226 53 34 29 30 31 16Total 409 410 97 153 170 213 257 91
0.5RF 13 68 88 135 230 233 107 26FR 271 216 146 108 81 54 20 4Total 284 285 235 242 311 287 127 30
0.4RF 126 246 119 57 63 69 29 12FR 393 204 108 56 105 84 60 72Total 519 449 227 113 167 153 89 83
0.3RF 59 146 92 65 49 54 54 22FR 542 202 76 113 88 101 88 50Total 601 347 167 178 137 155 142 72
1 2 3 4 5 6 7 8Section
From the LC distributions in the optimised cases, the following observations were made:
1. The number of lane changes for weaving vehicles are distributed across all sections of
the weaving segment. This indicates that the entire length is being better utilised for LC
activity, compared to the base case where it is concentrated in the first two sections.
2. The maximum number of lane changes in a section is considerably lower than that in
the base case. This indicates that the LC concentration problem has been alleviated;
consequently, LC has been distributed across all sections to avoid high LC density in any
given section.
3. Under congested conditions, the volume per lane on the weaving segment is at or close
to capacity. Hence, distributing vehicles across lanes at the weaving segment will create
gaps for LC. Within the first two sections, in most scenarios, the number of lane changes
by FR movements is greater than the RF movement. This indicates that FR vehicles in the
congested freeway lane tend to, as soon as possible, change lanes to the less congested
auxiliary lane; consequently, reducing the volume in lane 3, which creates greater gap
acceptance to facilitate LC for RF vehicles. Priority tends to be given to the FR movement
in the first section as there are more gaps in the auxiliary lane to change lanes, thereby,

4.4. SIMULATION RESULTS AND DISCUSSION 59
decreasing the volume in lane 3, which creates gaps for the RF movement to change lanes
further downstream.
4. In most scenarios, a proportionally high number of lane changes are loaded within the
first two sections (0-100 m), then gradually distributed across the remaining sections; the
lowest number of lane changes occurred within the final section to avoid missed exits due
to overcrowding.
Figure 4.11 shows a comparison of the density across all lanes between the base case, figure
4.11(a), and the optimised case, 4.11(b). Test ID 311, high ramp flow scenario, was used for
this illustration.
The density plot for the base case reveals the impact of the high LC density near the merge,
causing a bottleneck. The bottleneck propagates congestion further upstream on the freeway
mainline. Conversely, the optimised case shows that LC was effectively distributed along
the entire weaving segment length; a uniform density across all lanes can be observed, both
on the upstream and the downstream sections. This demonstrates that the C-ITS advisory
can efficiently smooth out transient disturbances caused by the LC concentration problem;
producing smooth traffic flow dynamics.

60 CHAPTER 4. CASE STUDY
(a) Density across all lanes (Base case)
(b) Density across all lanes (Optimised case)
Figure 4.11: Density across all lanes (Test 311)

4.4. SIMULATION RESULTS AND DISCUSSION 61
4.4.5 Discussion
In practice, freeway traffic control measures are implemented to reduce traffic congestion on
the freeway. Ramp metering (RM), a typical traffic control measure in freeway networks, is
designed to relieve or even prevent mainline congestion by regulating the upstream input flow
via traffic lights at freeway on-ramps (Zhao et al., 2016). A review of road traffic control
strategies, by Papageorgiou et al. (2003), explained that RM control strategies make use of
traffic measurements in the vicinity of a ramp to calculate suitable RM values. A common
RM control strategy (ALINEA) controls the ramp flow based on the desired occupancy mea-
surement downstream of the ramp. The strategy aims to prevent congestion on the freeway by
dynamically controlling green or red-phase duration (ramp flow) while stabilising the traffic
flow at a high throughput level.
RM strategies are effective at preventing disruption to mainline traffic flow by regulating
high ramp flows; however, ramp vehicles often suffer considerable delays when on-ramp queues
become excessive. RM can often cause delays for ramp vehicles to maintain flow capacity on
the downstream freeway section. For example, say an on-ramp demand flow is 700 veh/h, at a
metering rate of 600 veh/h/lane, the average delay will be 4.3 minutes per vehicle.
Another problem with RM strategies is once on-ramp queues become excessive, interference
with the arterial road network may occur (Papageorgiou and Kotsialos, 2000). Papageorgiou
et al. (2003) explains that when this occurs, an override of the regulator’s decisions can occur,
allowing more vehicles to enter the freeway and the ramp queue to diminish; often this will
result in congestion on the freeway.
The C-ITS advisory redistributes the LC along the weaving segment, hence, reducing the
LC density concentrated near the merge gore. The advisory can improve traffic flow dynamics
on the mainline without penalising on-ramp vehicle flow. Future research may investigate how
the advisory can be implemented with a RM strategy to increase throughput and reduce ramp
vehicle delay. The C-ITS advisory reduces the density occurring downstream of the ramp,
which may delay the activation of the RM strategy. The C-ITS advisory also facilitates a higher
flow of ramp vehicles; therefore, this may reduce ramp vehicle delays and queue lengths during
RM operation. Future research could explore the potential of combining the C-ITS advisory
and the RM strategies in improving freeway ramp management.

62 CHAPTER 4. CASE STUDY
C-ITS applications generate significant volumes of data, which raises questions of whether
such data could be linked to individuals and how C-ITS applications fit within current privacy
regimes in Australia dealing with the collection, use and disposal of personal information
(National Transport Commission, 2012). Driver distraction is another issue for C-ITS and the
use of in-vehicle display units. C-ITS will provide more information to drivers to empower
them to make better driving decisions, however, the challenge is to achieve this without over-
loading the drivers cognitive load (National Transport Commission, 2012). Road authorities and
governments must consider the impact of these issues and their implication on the regulatory
framework.
4.5 Summary
In this chapter, the proposed PSO was evaluated in optimising the LC advisory distribution. The
proposed PSO used a co-evolutionary approach to improve both the RF and the FR advisory
distributions. The LC advisory, which used the resulting distributions, managed the mandatory
lane changes of the weaving vehicles, while the non-weaving vehicles travelled as normal. The
weaving segment performance was then evaluated using the optimised LC advisory distribution.
The traffic simulation analysis revealed that the optimised LC distribution does not substan-
tially affect the operational effectiveness between the test scenarios; however, it does affect the
traffic flow dynamics in the critical weaving area. The research findings are summarised in
chapter 5.

Chapter 5
Conclusions
5.1 Research findings
In this study, a PSO algorithm was proposed for a C-ITS advisory on a freeway weaving
segment. Empirical research has observed that a LC concentration problem occurs in weaving
segments close to capacity. The distribution of lane changes was found to be concentrated
near the entrance, at times as soon as vehicles enter the segment. This behaviour leads to
congestion and reduces the weaving segment capacity. An advisory control strategy was shown
to alleviate the problem by distributing lane changes along the entire segment according to fixed
distributions. Unlike previous methods, this work proposed an optimisation algorithm, based
on PSO, to improve the LC advisory distribution for weaving vehicles. The speed over a short
section of the weaving segment, within the critical weaving area, was used as the objective
function. Traffic simulation was used to evaluate the performance of the weaving segment
using a C-ITS advisory and to compare it with the base case, with no control strategy. These
conclusions were made from the results:
1. The proposed PSO algorithm can be successfully used to improve the performance of
the weaving segment by optimising the LC advisory distribution, given the constraints of
the problem. The PSO algorithm was modified to satisfy the boundary and summation
constraints implicit in the solution representation.
2. The evaluation of the simulation tests revealed that the optimised LC advisory signif-
icantly improved the traffic performance of the weaving segment. The performance
indicators, speed and delay, were improved as a result of the optimised LC advisory,
63

64 CHAPTER 5. CONCLUSIONS
with speed producing a smoother profile than that of the base case.
3. The sensitivity analyses revealed that the optimised LC advisory has greater improvement
with higher RF-ratios. The delay improvement was most significant when the RF-ratio
was 0.7, with the improvement at 55.3%.
4. The optimised LC advisory was shown to effectively distribute the LC of weaving vehi-
cles across the entire length of the weaving segment. Priority tends to be given to the FR
movement in the first section as there are more gaps in the auxiliary lane to change lanes.
This decreases the volume in lane 3, which creates gaps for the RF movement to change
lanes further downstream.
Although field tests would provide more accurate outcomes, the evaluation of traffic simu-
lation shows improved performance for a weaving segment when optimising the LC advisory
distribution. This study concludes that the proposed PSO algorithm can be used to optimise the
LC advisory on a freeway weaving segment, resulting in better LC distributions.
5.2 Recommendations for future work
It is recommended that future research work investigate the following:
• Improving the effectiveness of the proposed PSO algorithm; testing its parameters and
design to improve the quality of the search.
• Investigating the effectiveness of different performance measures (objective functions)
for the weaving segment (for example, maximising traffic safety or throughput capacity).
• Testing, more comprehensively, the assumptions made in the case study, such as pene-
tration and compliance rates, to evaluate the practical implications of the C-ITS advisory
control strategy. For instance, the DSRC connection, assumed to be entirely reliable,
is influenced by many factors, such as measurement discrepancies and communication
delays.
• Investigating the C-ITS advisory with different traffic control strategies, such as ramp
metering, to improve weaving segment traffic performance.

5.2. RECOMMENDATIONS FOR FUTURE WORK 65
• Investigating the impacts of different penetration rates and V2V connectivity will provide
a more thorough analysis of the strategy.

66 CHAPTER 5. CONCLUSIONS

Appendix A
Sensitivity tests – traffic demand
Table A.1: Sensitivity tests – traffic demand
Test ID RF-ratio vFF vRR vFR vRF vW v111 1260 540 1800 7200112 5300 100 840 360 1200 6600113 420 180 600 6000121 1260 540 1800 6010122 0.3 4110 100 840 360 1200 5410123 420 180 600 4810131 1260 540 1800 5150132 3250 100 840 360 1200 4550133 420 180 600 3950211 900 900 1800 7200212 5300 100 600 600 1200 6600213 300 300 600 6000221 900 900 1800 6010222 0.5 4110 100 600 600 1200 5410223 300 300 600 4810231 900 900 1800 5150232 3250 100 600 600 1200 4550233 300 300 600 3950311 540 1260 1800 7200312 5300 100 360 840 1200 6600313 180 420 600 6000321 540 1260 1800 6010322 0.7 4110 100 360 840 1200 5410323 180 420 600 4810331 540 1260 1800 5150332 3250 100 360 840 1200 4550333 180 420 600 3950
67

68 APPENDIX A. SENSITIVITY TESTS – TRAFFIC DEMAND

Appendix B
Lane-changing distribution
Table B.1: Lane-changing advisory distributions
Test ID RF lane-changing advisory distribution FR lane-changing advisory distribution
111 40% 12% 12% 17% 0% 20% 0% 0% 67% 0% 0% 33% 0% 0% 0% 0%112 14% 0% 35% 44% 0% 7% 0% 0% 79% 19% 2% 0% 0% 0% 0% 0%113 1% 0% 26% 0% 73% 0% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%121 39% 0% 21% 14% 26% 0% 0% 0% 78% 19% 3% 0% 0% 0% 0% 0%122 18% 8% 35% 0% 30% 9% 0% 0% 69% 20% 8% 3% 0% 0% 0% 0%123 10% 0% 55% 0% 0% 35% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%131 40% 21% 17% 12% 10% 0% 0% 0% 50% 28% 22% 0% 0% 0% 0% 0%132 8% 33% 0% 30% 0% 28% 0% 0% 97% 0% 3% 0% 0% 0% 0% 0%133 0% 0% 60% 25% 14% 0% 0% 1% 99% 0% 0% 1% 0% 0% 0% 0%211 4% 17% 3% 24% 35% 18% 0% 0% 58% 31% 10% 0% 0% 0% 0% 0%212 49% 0% 0% 26% 25% 0% 0% 0% 82% 0% 17% 0% 0% 0% 0% 0%213 0% 28% 31% 30% 5% 5% 1% 0% 84% 16% 0% 0% 0% 0% 0% 0%221 40% 18% 25% 5% 11% 0% 0% 0% 67% 33% 1% 0% 0% 0% 0% 0%222 28% 18% 40% 13% 0% 0% 0% 0% 97% 0% 3% 0% 0% 0% 0% 0%223 0% 17% 43% 0% 7% 32% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%231 23% 17% 16% 20% 12% 13% 0% 0% 69% 6% 20% 4% 0% 0% 0% 0%232 4% 39% 0% 0% 56% 0% 0% 0% 89% 3% 9% 0% 0% 0% 0% 0%233 4% 38% 15% 0% 43% 0% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%311 21% 0% 47% 0% 0% 31% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%312 0% 44% 0% 43% 0% 13% 0% 0% 99% 1% 0% 0% 0% 0% 0% 0%313 14% 10% 30% 21% 14% 10% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%321 17% 32% 0% 37% 14% 0% 0% 0% 96% 0% 4% 0% 0% 0% 0% 0%322 3% 26% 22% 11% 24% 14% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%323 31% 0% 5% 6% 29% 29% 0% 0% 76% 24% 0% 0% 0% 0% 0% 0%331 21% 0% 38% 41% 0% 0% 0% 0% 100% 0% 0% 0% 0% 0% 0% 0%332 7% 18% 34% 9% 17% 14% 0% 0% 94% 0% 5% 0% 0% 0% 0% 0%333 20% 0% 45% 0% 3% 0% 32% 0% 82% 6% 13% 0% 0% 0% 0% 0%
Section 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
69

70 APPENDIX B. LANE-CHANGING DISTRIBUTION
Table B.2: Number of lane changes – Base case
Test ID RF number of lane changes FR number of lane changes
111 175 329 62 4 2 2 2 2 845 355 93 17 7 3 2 0112 109 219 61 5 2 0 1 1 615 179 59 20 9 4 2 0113 57 84 37 3 1 0 1 0 351 55 26 12 5 2 0 0121 170 330 74 4 4 2 3 2 827 352 105 27 10 6 3 0122 107 195 67 6 1 1 2 1 609 161 60 22 8 3 2 0123 61 89 42 3 0 0 0 1 341 62 24 11 5 2 1 0131 159 313 87 9 2 2 1 2 843 335 107 32 10 4 2 2132 113 194 70 4 1 1 1 1 623 166 56 19 10 2 1 1133 65 81 41 3 0 0 0 0 336 56 25 10 4 1 0 0211 394 492 83 8 5 5 4 6 520 350 69 11 6 2 2 1212 174 362 94 9 2 3 3 3 394 179 44 15 5 2 1 0213 90 153 69 6 1 1 0 1 225 55 19 8 4 1 0 0221 304 515 119 10 5 3 3 4 497 343 80 19 7 2 1 1222 180 318 122 8 1 2 2 3 395 168 46 15 5 3 1 0223 101 141 76 8 1 1 1 1 227 49 17 7 4 2 0 0231 275 517 152 15 4 4 2 4 471 349 96 18 7 2 1 1232 180 305 128 12 3 1 2 2 403 173 56 14 6 2 1 0233 111 134 69 7 1 1 0 1 227 54 17 7 2 1 0 0311 942 315 48 12 5 4 7 6 403 130 29 8 3 1 1 0312 247 476 148 14 5 3 4 4 194 130 36 8 3 1 0 0313 112 217 108 11 2 2 1 2 129 36 16 3 3 1 0 0321 367 682 239 49 10 6 5 7 219 243 88 17 6 1 0 0322 232 454 172 19 4 4 3 3 204 131 40 11 2 1 0 0323 126 189 101 11 3 1 1 2 134 37 11 6 2 1 0 0331 327 691 289 41 8 6 4 7 173 256 105 15 4 1 1 0332 243 414 205 19 4 3 3 6 199 128 47 6 3 1 1 0333 153 182 105 10 1 2 1 2 125 37 11 5 2 1 0 0
Section 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8

71
Table B.3: Number of lane changes – Optimised case
Test ID RF number of lane changes FR number of lane changes
111 62 148 98 70 57 59 56 28 558 215 79 118 95 104 84 58112 15 30 64 124 102 42 15 6 488 172 81 58 47 27 10 3113 2 1 22 19 52 50 32 3 354 44 28 17 5 2 1 0121 62 117 101 91 122 68 19 6 656 292 138 95 80 43 15 7122 20 42 84 55 72 66 29 8 422 143 81 73 67 43 26 9123 6 8 57 38 16 32 23 15 345 54 26 12 5 1 1 0131 64 157 145 96 67 36 8 3 428 251 187 152 143 105 47 19132 11 73 52 83 36 74 32 22 626 132 66 27 15 9 3 2133 0 0 61 61 46 16 5 0 340 48 25 12 4 2 2 0211 12 84 92 139 260 257 113 31 281 225 152 116 96 58 20 5212 82 166 52 74 131 107 30 6 334 130 71 30 32 24 12 6213 2 33 73 96 68 30 10 7 192 50 24 21 14 7 3 1221 100 268 265 153 101 47 19 7 339 274 122 91 73 36 13 2222 49 133 214 147 70 15 3 4 409 131 51 22 12 7 2 0223 1 22 74 61 39 59 46 26 238 37 15 8 5 2 0 0231 62 181 188 174 147 131 64 22 359 188 128 80 69 63 39 15232 10 116 90 48 179 122 56 9 399 115 64 28 21 18 7 4233 5 65 61 37 81 49 23 3 241 39 18 7 2 1 0 0311 94 147 347 254 78 129 214 82 261 206 76 22 9 1 0 1312 3 130 179 212 185 103 59 27 222 82 47 13 6 3 1 0313 19 46 84 91 93 71 36 13 135 27 17 5 2 1 0 0321 59 307 243 287 272 149 34 10 224 214 87 19 20 7 3 1322 10 101 190 151 156 148 96 31 242 82 45 15 5 1 0 0323 43 58 42 23 61 96 79 28 108 38 14 13 11 5 2 0331 82 145 339 455 257 77 10 8 245 200 78 25 5 3 1 0332 19 92 229 170 154 124 75 32 228 79 42 16 8 6 3 2333 47 34 114 68 49 9 66 53 109 27 13 11 9 8 4 1
Section 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8

72 APPENDIX B. LANE-CHANGING DISTRIBUTION

References
Al-Jameel, H. (2013). Characteristics of the driver behaviour in weaving sections: empirical
study. In International Journal of Engineering Research and Technology, volume 2. ESRSA
Publications.
Alexander, P., Haley, D., and Grant, A. (2011). Cooperative intelligent transport systems: 5.9-
ghz field trials. Proceedings of the IEEE, 99(7):1213–1235.
AlRashidi, M. R. and El-Hawary, M. E. (2009). A survey of particle swarm optimization
applications in electric power systems. IEEE Transactions on Evolutionary Computation,
13(4):913–918.
Austroads (2012a). Cooperative ITS Strategic Plan. Research Report AP-R413-12, Austroads
Ltd, Sydney NSW.
Austroads (2012b). Evaluation of the Potential Safety Benefits of Collision Avoidance
Technologies Through Vehicle to Vehicle Dedicated Short Range Communications (DSRC)
in Australia. Research Report AP-R375/11, Austroads Ltd, Sydney NSW.
Austroads (2013). Vehicle Positioning for C-ITS in Australia (Background Document).
Research Report AP-R431-13, Austroads Ltd, Sydney NSW.
Austroads (2015). Cooperative Intelligent Transport Systems (C-ITS) Standards Assessment.
Research Report AP-R474-15, Austroads Ltd, Sydney NSW.
Barcelo, J. (2010). Fundamentals of traffic simulation, volume 145. Springer.
Bureau of Infrastructure, Transport and Regional Economics (BITRE) (2009). Greenhouse Gas
Emissions From Australian Transport: Base Case Projections to 2020. Working paper 73,
Canberra ACT.
73

74 REFERENCES
Bureau of Infrastructure, Transport and Regional Economics (BITRE) (2015). Traffic and
congestion cost trends for Australian capital cities. Information sheet 74, Canberra ACT.
Cao, C. T., Cui, F., and Guo, G. Q. (2010). Two-direction green wave control of traffic signal
based on particle swarm optimization. In Applied Mechanics and Materials, volume 26,
pages 507–511. Trans Tech Publ.
Cassidy, M., Skabardonis, A., and May, A. D. (1989). Operation of major freeway weaving
sections: recent empirical evidence. Transportation Research Record, (1225).
Cassidy, M. J. and May, A. D. (1991). Proposed analytical technique for estimating capacity
and level of service of major freeway weaving sections. Transportation Research Record,
1320:99–109.
Chen, C., Jia, Z., and Varaiya, P. (2001). Causes and cures of highway congestion. IEEE control
systems, 21(6):26–32.
Chen, J. and Xu, L. (2006). Road-junction traffic signal timing optimization by an adaptive
particle swarm algorithm. In Control, Automation, Robotics and Vision, 2006. ICARCV’06.
9th International Conference on, pages 1–7. IEEE.
Coello, C. A. C. and Montes, E. M. (2002). Constraint-handling in genetic algorithms through
the use of dominance-based tournament selection. Advanced Engineering Informatics,
16(3):193–203.
Denny, R. and Williams, J. (2005). Capacity and quality of service of weaving zones. Final
Report, NCHRP Project, pages 3–55.
Dong, C., Liu, Z., and Liu, X. (2006). Chaos-particle swarm optimization algorithm and its
application to urban traffic control. International Journal of Computer Science and Network
Security, 6(1 B):97–101.
Eberhart, R. C. and Kennedy, J. (1995). A new optimizer using particle swarm theory. In
Proceedings of the sixth international symposium on micro machine and human science,
volume 1, pages 39–43. New York, NY.
Eberhart, R. C. and Shi, Y. (2000). Comparing inertia weights and constriction factors in particle
swarm optimization. In Evolutionary Computation, 2000. Proceedings of the 2000 Congress
on, volume 1, pages 84–88. IEEE.

REFERENCES 75
Engelbrecht, A. P. (2007). Computational intelligence: an introduction. John Wiley & Sons.
Gopalakrishnan, K., Gandomi, A., Yang, X., and Talatahari, S. (2013). Particle swarm
optimization in civil infrastructure systems: state-of-the-art review. In Metaheuristic
applications in structures and infrastructures, pages 49–76. Elsevier London (UK).
Green, D., Bennett, P., Han, C., Faber, F., Ballingall, S., et al. (2014). Cooperative intelligent
transport systems (C-ITS) - an overview of the ARRB/Austroads C-ITS work program 2010-
2013. Road & Transport Research: A Journal of Australian and New Zealand Research and
Practice, 23(2):15.
He, H. and Menendez, M. (2016a). Distribution and impacts of lane changes at a freeway
weaving section: an empirical study. In Transportation Research Board 95th Annual Meeting,
number 16-4923.
He, H. and Menendez, M. (2016b). Empirical comparison between longer and shorter weaving
sections in Switzerland. Swiss Transport Research Conference (STRC).
Kachroudi, S. and Bhouri, N. (2009). A multimodal traffic responsive strategy using particle
swarm optimization. IFAC Proceedings Volumes, 42(15):531–537.
Kanazawa, F., Kanoshima, H., Sakai, K., and Suzuki, K. (2010). Field operational tests of
smartway in japan. IATSS research, 34(1):31–34.
Kwon, E. (2003). Dynamic estimation of freeway weaving capacity for traffic management and
operations, phase ii. Technical report.
Kwon, E., Lau, R., and Aswegan, J. (2000). Maximum possible weaving volume for effective
operations of ramp-weave areas: online estimation. Transportation Research Record:
Journal of the Transportation Research Board, (1727):132–141.
Lee, C., Hellinga, B., and Saccomanno, F. (2006). Evaluation of variable speed limits to
improve traffic safety. Transportation research part C: emerging technologies, 14(3):213–
228.
Lee, J. H. (2008). Observations on Traffic Behavior in Freeway Weaving Bottlenecks: Empirical
Study and Theoretical Modeling. ProQuest.

76 REFERENCES
Lertworawanich, P. (2012). Highway network restoration after the great flood in thailand.
Natural hazards, 64(1):873–886.
Lianyu, W., Jianfu, D., et al. (2009). Research on od matrix calculation based on quantum
behaved particle swarm optimization algorithm. Journal of Software Engineering and
Applications, 2(05):344.
Mai, T., Jiang, R., and Chung, E. (2016). A Cooperative Intelligent Transport Systems (C-ITS)-
based lane-changing advisory for weaving sections. Journal of Advanced Transportation.
National Transport Commission (2012). Cooperative ITS Regulatory Policy Issues. Discussion
paper, Melbourne VIC.
Papageorgiou, M., Diakaki, C., Dinopoulou, V., Kotsialos, A., and Wang, Y. (2003). Review of
road traffic control strategies. Proceedings of the IEEE, 91(12):2043–2067.
Papageorgiou, M. and Kotsialos, A. (2000). Freeway ramp metering: An overview. In
Intelligent Transportation Systems, 2000. Proceedings. 2000 IEEE, pages 228–239. IEEE.
Paquet, U. and Engelbrecht, A. P. (2003). A new particle swarm optimiser for linearly
constrained optimisation. In Evolutionary Computation, 2003. CEC’03. The 2003 Congress
on, volume 1, pages 227–233. IEEE.
Park, H. and Smith, B. L. (2012). Investigating benefits of intellidrive in freeway operations:
Lane changing advisory case study. Journal of Transportation Engineering, 138(9):1113–
1122.
Peng, L., Wang, M.-h., Du, J.-p., and Luo, G. (2009). Isolation niches particle swarm
optimization applied to traffic lights controlling. In Decision and Control, 2009 held jointly
with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th
IEEE Conference on, pages 3318–3322. IEEE.
Scarinci, R. and Heydecker, B. (2014). Control concepts for facilitating motorway on-ramp
merging using intelligent vehicles. Transport reviews, 34(6):775–797.
Shi, Y. and Eberhart, R. (1998). A modified particle swarm optimizer. In Evolutionary
Computation Proceedings, 1998. IEEE World Congress on Computational Intelligence., The
1998 IEEE International Conference on, pages 69–73. IEEE.

REFERENCES 77
Shladover, S. E. (2017). Connected and automated vehicle systems: Introduction and overview.
Journal of Intelligent Transportation Systems, (just-accepted):00–00.
Shoraka, M. and Puan, O. C. (2010). Review of evaluating existing capacity of weaving
segments. International Journal of Civil and Structural Engineering, 1(3):683.
Srinivasan, D. and Seow, T. H. (2003). Particle swarm inspired evolutionary algorithm (ps-ea)
for multiobjective optimization problems. In Evolutionary Computation, 2003. CEC’03. The
2003 Congress on, volume 4, pages 2292–2297. IEEE.
Talebpour, A., Mahmassani, H. S., and Hamdar, S. H. (2015). Modeling lane-changing behavior
in a connected environment: A game theory approach. Transportation Research Part C:
Emerging Technologies, 59:216–232.
Teodorovic, D. (2008). Swarm intelligence systems for transportation engineering: Principles
and applications. Transportation Research Part C, 6(16):651–667.
The Department of Infrastructure and Regional Development (2015). Australian Infrastructure
Audit, Our Infrastructure Challenges.
Tientrakool, P., Ho, Y.-C., and Maxemchuk, N. F. (2011). Highway capacity benefits from
using vehicle-to-vehicle communication and sensors for collision avoidance. In Vehicular
Technology Conference (VTC Fall), 2011 IEEE, pages 1–5. IEEE.
Transport for NSW (2015). Cooperative Intelligent Transport Systems. [Online; accessed
March 28, 2016].
TRB (2010). Highway Capacity Manual 2010. Transportation Research Board.
United States Department of Transportation (2017). Automated Vehicles for Safety. [Online;
accessed September 25, 2017].
Vermijs, R. (1998). New dutch capacity standards for freeway weaving sections based on micro
simulation. In Third International Symposium on Highway Capacity, number Volume 2.
Wall, J. P., Tyler, P., et al. (2014). The citi project-australia’s first cooperative intelligent
transport system test facility for safety applications. Journal of the Australasian College
of Road Safety, 25(2):64.

78 REFERENCES
Wang, L., Abdel-Aty, M., Shi, Q., and Park, J. (2015). Real-time crash prediction for
expressway weaving segments. Transportation Research Part C: Emerging Technologies,
61:1–10.
Wang, Z., Luo, D., Huang, Z., and Zhang, H. (2007). Optimal coordination of artery system
based on modified particle swarm algorithm. Syst Eng Theor Pract, 10:165–171.
Weiß, C. (2011). V2X communication in Europe – From research projects towards
standardization and field testing of vehicle communication technology. Computer Networks,
55(14):3103–3119.
Yang, X.-S. (2010). Nature-inspired metaheuristic algorithms. Luniver press.
Yang, X.-S. (2014). Nature-inspired optimization algorithms. Elsevier.
Zhang, Y. and Rakha, H. (2008). Systematic analysis of capacity of weaving sections. Al-Qadi,
Sayed, Alnuaimi & Masad (eds.), Efficient Transportation and Pavement Systems, pages 151–
164.
Zhao, J., Jia, L., Chen, Y., and Wang, X. (2006). Urban traffic flow forecasting model of double
rbf neural network based on pso. In Intelligent Systems Design and Applications, 2006.
ISDA’06. Sixth International Conference on, volume 1, pages 892–896. IEEE.
Zhao, J., Ma, W., Liu, Y., and Han, K. (2016). Optimal operation of freeway weaving segment
with combination of lane assignment and on-ramp signal control. Transportmetrica A:
Transport Science, 12(5):413–435.
Zhu, Q., Qian, L., Li, Y., and Zhu, S. (2006). An improved particle swarm optimization
algorithm for vehicle routing problem with time windows. In Evolutionary Computation,
2006. CEC 2006. IEEE Congress On, pages 1386–1390. IEEE.