
Optimal Control of Unsteady Compressible Viscous Flows€¦ · Compressible Viscous Flows S. Scott...
38
Optimal Control of Unsteady Compressible Viscous Flows S. Scott Collis Department of Mechanical Engineering and Materials Science, Rice University, Houston, TX 77005-1892, USA E-mail: [email protected] Kaveh Ghayour Department of Computational and Applied Mathematics and Department of Mechanical Engineering and Materials Science, Rice University, Houston, TX 77005-1892, USA E-mail: [email protected] Matthias Heinkenschloss Department of Computational and Applied Mathematics, Rice University, Houston, TX 77005-1892, USA E-mail: [email protected] Michael Ulbrich and Stefan Ulbrich Lehrstuhl fur Angewandte Mathematik und Mathematische Statistik, Zentrum Mathematik, Technische Universitat Munchen, D–80290 Munchen, Germany E-mail: [email protected], [email protected] This paper is concerned with the formulation and numerical solution of a class of optimal boundary control problems governed by the unsteady two-dimensional compressible Navier–Stokes equations. Fundamental issues including the choice of the control space and the associated regularization term in the objective function, adjoint computations, as well as the impact of the inner product in the control space on the gradient computation are discussed. Numerical results are presented for a model problem consisting of two counter-rotating viscous vortices above an infinite wall which, due to the self-induced velocity field, propagate downward and interact with the wall. The wall boundary control is the temporal and spatial distribution of wall-normal velocity. Different objectives and different control regularizations are studied. 1. INTRODUCTION In this paper we study the optimal boundary control of flows governed by the two- dimensional unsteady compressible Navier–Stokes equations. Our research is motivated by the potential to develop novel and effective flow control strategies for inherently com- pressible phenomena including aeroacoustics and heat transfer by utilizing optimal control theory. The main purpose of this paper, however, is not the study of a specific applica- 1
Transcript of Optimal Control of Unsteady Compressible Viscous Flows€¦ · Compressible Viscous Flows S. Scott...

Optimal Control of UnsteadyCompressible Viscous Flows
S. Scott CollisDepartment of Mechanical Engineering and Materials Science,
Rice University, Houston, TX 77005-1892, USA
E-mail: [email protected]
Kaveh GhayourDepartment of Computational and Applied Mathematics and
Department of Mechanical Engineering and Materials Science,Rice University, Houston, TX 77005-1892, USA
E-mail: [email protected]
Matthias HeinkenschlossDepartment of Computational and Applied Mathematics,
Rice University, Houston, TX 77005-1892, USA
E-mail: [email protected]
Michael Ulbrich and Stefan UlbrichLehrstuhl fur Angewandte Mathematik und Mathematische Statistik,
Zentrum Mathematik, Technische Universitat Munchen, D–80290 Munchen, Germany
E-mail: [email protected], [email protected]
This paper is concerned with the formulation and numerical solution of a class
of optimal boundary control problems governed by the unsteady two-dimensional
compressible Navier–Stokes equations. Fundamental issues including the choice of
the control space and the associated regularization term in the objective function,
adjoint computations, as well as the impact of the inner product in the control space
on the gradient computation are discussed. Numerical results are presented for a
model problem consisting of two counter-rotating viscous vortices above an infinite
wall which, due to the self-induced velocity field, propagate downward and interact
with the wall. The wall boundary control is the temporal and spatial distribution of
wall-normal velocity. Different objectives and different control regularizations are
studied.
1. INTRODUCTION
In this paper we study the optimal boundary control of flows governed by the two-dimensional unsteady compressible Navier–Stokes equations. Our research is motivatedby the potential to develop novel and effective flow control strategies for inherently com-pressible phenomena including aeroacoustics and heat transfer by utilizing optimal controltheory. The main purpose of this paper, however, is not the study of a specific applica-
1

2 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
tion, but the investigation of some fundamental issues arising in the numerical solution ofoptimal control problems for unsteady compressible flows.
There has been a significant amount of research on optimal control and optimal design forproblems governed by the steady and unsteady incompressible Navier–Stokes equations aswell as on the optimization of compressible steady-state Euler equations and Navier–Stokesequations in the context of optimal design. The papers [2, 3, 9, 22, 23, 26, 27, 34] presenta sample of recent activities in the former category and the references [6, 8, 30–32, 41]illustrate activities in the latter category. To the authors’ knowledge, the present paperdocuments the first approach to the optimal boundary control of unsteady compressibleviscous flows. Our research is guided by the previous work on optimal flow control anddesign. Because different flow control and design problems were studied, past researchhas only addressed some of the features (time-dependence of the governing equations,compressibility of the flow, and control inputs that are distributed over portions of theboundary and over time) present in our problems.
One goal of this paper is the investigation of a proper mathematical formulation of theoptimal control of unsteady compressible viscous flows. Specifically we investigate theselection of the space of optimal controls as well as the related choice of the regularizationterm in the objective function. These choices are important for the mathematical well-posedness of the optimal control problems and are therefore fundamental to a numericalsolution. The choice of the control space also enters the gradient computation. Thegradient has to be computed with respect to the inner product in the control space. Inmany numerical approaches for the optimal control of partial differential equations this isignored and, after a full discretization of the problem, the gradient is simply computed withrespect to the Euclidean inner product in IRn, where n is the number of discretized controls.This can lead to artificial ill-conditioning, unsatisfactory performance of the optimizationalgorithm, and a poor quality of the computed solution. We demonstrate numerically thatan inappropriate choice of the control space and corresponding inner product can lead tocomputed controls that are highly oscillatory in space or time. A proper choice of thecontrol space and corresponding inner product prevents this, without degradation in theperformance achieved by the computed control. Since our controls are distributed overa portion of the spatial boundary and over time, we use the adjoint approach to computethe gradient of the objective function. We discuss the gradient computation for the semi-discrete and the fully discrete problems. The gradients for these problems are computedwith respect to inner products that are discretizations of the inner products identified forthe original problem. Proper inner products for the controls in our problems involvethe time derivative of the control. As a consequence, the gradient computation in thesemi-discrete problem requires the solution of a very large scale two-point boundary valueproblem. If higher order spatial and time discretizations are used, this two-point boundaryvalue is cumbersome and expensive to solve. We propose an equivalent reformulation ofthe problem that avoids this task. This problem reformulation is also applicable to otherproblems, such as [23], where the same issue arises.
This article complements and extends our recent conference papers [10, 11]. The paper[10] presents formal computations of the objective function gradient and the correspondingadjoint equations on the partial differential equation level for the compressible Navier–Stokes equations, which is not included here. The paper [11] is a predecessor of thecurrent paper that presents our initial formulation and early results. The current paperextends upon [11] by providing a more complete problem formulation with particular

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 3
attention given to the reformulation introduced for problems involving the time-derivativeof the control. In addition, the current paper supplies more extensive numerical results forthe control of wall-vortex interaction — a model problem motivated by the blade-vortexinteraction phenomena that commonly occurs for rotorcraft. Our numerical results includecontrol of heat transfer, wall shear stress, and kinetic energy all using controls defined overa subset of the wall boundary. These results provide interesting insight into the physicsand control of compressible flows while serving as a thorough suite of problems to bothdemonstrate and test the features of our optimal control formulation.
The outline of this paper is as follows. In Section 2 we begin with a discussion ofthe mathematical formulation of the optimal control problems under consideration. Inparticular, Section 2.3 emphasizes the selection of the space of optimal controls as well asthe related choice of regularization term in the objective function. The role of the adjointequation and the choice of the inner product of the control space in the gradient computationare outlined in an abstract setting in Section 3. In Section 4 we describe the finite differencemethod used for the spatial discretization and the implementation of boundary conditions.The gradient computation for the semi-discrete problem, including the aforementionedproblem reformulation is discussed in Section 5. The gradient computation of the fullydiscretized problem is described in Section 6 based on a Runge–Kutta time discretizationand a few details of the optimization method are specified in Section 7. Section 8 presentsnumerical results for three different optimal control problems and Section 9 summarizesthe major conclusions of this work.
2. PROBLEM FORMULATION2.1. The Compressible Navier–Stokes Equations
The spatial domain occupied by the fluid is Ω =x ∈ IR2 : x2 > 0
and Γ denotes its
spatial boundary. The portion of the boundary on which suction and blowing is applied isthe controlled boundary
Γc = x = (x1, 0) : x1 ∈ [a, b] .
Let
u = (ρ, v1, v2, T )T
denote the primitive flow variables,where ρ(t,x) is the density; vi(t,x) denotes the velocityin the xi-direction, i = 1, 2; v = (v1, v2)T ; and T (t,x) denotes the temperature. Thepressure p and the total energy per unit mass E are given by
p =ρT
γM2 , E =T
γ(γ − 1)M2 +12vT v,
respectively, where γ is the ratio of specific heats and M is the reference Mach number. Wewrite the conserved variables ρ, ρv1, ρv2, ρE as functions of the primitive variables,
q(u) = (ρ, ρv1, ρv2, ρE)T,

4 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
and we define the inviscid flux vectors
F1(u) =
ρv1
ρv21 + p
ρv2v1
(ρE + p)v1
, F2(u) =
ρv2
ρv1v2
ρv22 + p
(ρE + p)v2
,
and the viscous flux vectors
Gi(u) =1Re
0
τ1i
τ2i
τ1iv1 + τ2iv2 +κ
PrM2(γ − 1)Txi
,
i = 1, 2, where τij are the elements of the stress tensor
τ = µ(∇v + ∇vT ) + λ(∇ · v)I. (1)
Here µ and λ are the first and second coefficients of viscosity, κ is the thermal conductivity,Pr is the reference Prandtl number, and Re is the reference Reynolds number. For theproblems presented here, constant Prandtl number and fluid properties (viscosities andthermal conductivity) are assumed along with Stokes hypothesis for the second coefficientof viscosity, λ = −2µ/3. Constant Prandtl number and fluid properties were selectedto simplify the exposition and these assumptions are reasonable for the model problemsconsidered in Section 8 which do not involve large changes in temperature. However, forgeneral compressible flows, variable fluid properties are required and these can be easilyaccommodated in our formulation and will be included in future studies.
The two-dimensional compressible Navier–Stokes equations for the time interval [0, tf ]can now be written as
q(u)t +2∑
i=1
(Fi(u)xi − Gi(u)xi
)= 0 in (t0, tf ) × Ω (2)
with boundary conditions
B(u, g) = 0 on (t0, tf ) × Γ (3)
and initial conditions
u(t0,x) = u0(x) in Ω. (4)
The function g in the boundary conditions (3) acts as the control, which, for the problemsconsidered here, is taken to be suction and blowing in wall normal direction on Γc, and ismodeled by
v(t,x) = b(t,x) − g(t,x)n(t,x) on (t0, tf ) × Γc. (5)
Here, n is the unit outward normal and b is a given boundary velocity that satisfies thecompatibility condition v0(x) = b(t0,x) for x ∈ Γ. Due to the minus sign in (5), g > 0corresponds to blowing, whereas g < 0 means that fluid is sucked out of the domain.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 5
2.2. Review of Existence and Uniqueness Results for the CompressibleNavier–Stokes Equations
Our notation for function spaces follows [36], see also [14, 15, 39]. To the best ofour knowledge, the question of existence and uniqueness of global solutions for the fullcompressible Navier-Stokes equations (2), (4) with Ω = IRn, n = 2, 3, is still open for largeinitial data. The existence and uniqueness of global solutions with (ρ − ρ0,v, T − T0) ∈C(t0, tf ; H3(IR3)) ∩ C1(t0, tf ; H1(IR3)) for the initial value problem (2), (4) is shownin [36] if the initial data u0 are close in H3(IR3) to a constant state (ρ0, 0, 0, T0)T ,ρ0, T0 > 0. Local existence in time can be shown also for large data. An analogousglobal existence result for the initial-boundary value problem (2)–(4) is shown in [37] if Ωis the half space
x ∈ IR3 : x3 > 0
or the exterior of any bounded region with smooth
boundary and if the boundary conditions are v|(t0,tf )×Γ = 0 and either T |(t0,tf )×Γ = T0
or ∂T∂n = 0, where n denotes the outward unit normal. Similar results can be found in the
review article [44]. The global existence of weak solutions for the initial value problem (2),(4) with Ω = IRn, n = 2, is shown in [29], if ρ(t0, ·) − ρ0 is small in L2(IRn) ∩ L∞(IRn),v(t0, ·) is small in L2(IRn)∩L4(IRn), and T (t0, ·)−T0 is small in L2(IRn) with constantsρ0, T0 > 0. It is shown that v, T are Holder-continuous in space and time for t > t0,v(t, ·), T (t, ·) − T0 ∈ H1(IRn), but merely ρ(t, ·) − ρ0 ∈ L2(IRn) ∩ L∞(IRn), ρ − ρ0 ∈C(t0, tf ; H−1(IRn)). Actually, slightly weaker conditions on the initial data are needed,but these are more lengthy to state and are therefore omitted here. Similar results withslightly more restrictive conditions on the initial conditions hold for n = 3. The questionof uniqueness is left open. Other results, mostly for the barotropic case in which pressuredepends only on ρ and which decouples the energy equation from the remaining ones, canbe found in [35, 44].
2.3. The Optimal Control ProblemAbstractly, all optimal control problems treated in this paper are of the form
ming∈Gad
J(g) def= JObs(u(g)) + JReg(g), (6)
where g is the control, Gad is the set of admissible controls, u(g) is the solution of thecompressible Navier–Stokes equations, JObs is the part of the cost function that representsour flow control objective (the ‘observed part’) and JReg(g) is a regularization term,typically some weighted norm of the control. The concrete choices of the set of admissiblecontrols Gad and of the objective function J depend on the physical system we want tocontrol (e.g., how much suction and blowing can the actuators provide, what part of theflow do we want to influence), but they also need to be chosen to ensure the existence ofa solution g∗ of the optimal control problem (6). Before we discuss our choices of JObs,JReg, and Gad, we comment on the inclusion of the compressible Navier–Stokes equations(2)-(4) into our optimal control formulation.
In our formulation (6) of the optimal control problem, the solution of the compressibleNavier–Stokes equations (2)–(4) is viewed as a function of the controls. In particular,every evaluation of the objective J(g) requires the solution of (2)–(4) for the given control.Alternatively, one can include the compressible Navier–Stokes equations (2)–(4) as an

6 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
explicit constraint into the optimization problem. This leads to
min JObs(u) + JReg(g),s.t. equations (2) − (4),
g ∈ Gad.
(7)
In (7) the control g and the flow variables u are both optimization variables that arecoupled through the constraints (2)–(4). The choice of problem formulation (6) or (7)has theoretical and numerical implications that result from the fact that (7) requires thecompressible Navier–Stokes equations (2)–(4) to hold only at the solution g∗, whereas(6) requires that the compressible Navier–Stokes equations (2)–(4) is satisfied at everytrial control g and that the solution u(g) of (2)–(4) is unique. In light of the limitedexistence and uniqueness results for the compressible Navier–Stokes equations (2)–(4),which were reviewed in Section 2.2, formulation (7) seems theoretically preferable over(6). However, in our numerical experiments with instances of (6) we have not encountereddifficulties that would indicate lack of existence or uniqueness of the solution (2)–(4) inthe situations we have considered. Our primary reason to choose (6) as our optimal controlproblem formulation are the large storage requirements associated with problems of thistype. Storage requirements of gradient based algorithms for (6) are already very largeand typically need to be met using storage saving techniques. We will return to this issuein Section 7. The storage requirements for optimization algorithms which do not requirethat (2)–(4) is satisfied at each iteration, such as sequential quadratic programming (SQP)methods, are even larger. Storage savings techniques could be used here as well, but forproblems of the type considered here the additional computational work associated withsuch techniques far outweighs the possible numerical savings that arise when the nonlinearconstraints (2)–(4) are not solved in each iteration. For the same reason, the problemformulation (6) is also preferred over (7) for the numerical solution of optimal controlproblems of unsteady incompressible Navier–Stokes equations, see, e.g., [2, 23, 27, 34].We note that the situation is different when optimal control problems governed by steadyincompressible Navier–Stokes equations are solved. See, e.g., the numerical comparisonsin [4, 19].
To make the discussion concrete,we consider three specific objectives. The first objectiveis the minimization of kinetic energy in Ω0 ⊂ Ω at the final time tf ,
JObs(u(g)) =12
∫Ω0
ρ(tf ,x)‖v(tf ,x)‖22dx, (8)
the second is the minimization of heat transfer over a subset Γ0 of the bottom wall,
JObs(u(g)) =12
∫ tf
t0
∫Γ0
ω(x)(
∂
∂nT (t,x)
)2
dx, (9)
and the third objective is the minimization of shear stress over a subset Γ0 of the bottomwall,
JObs(u(g)) =12
∫ tf
t0
∫Γ0
ω(x)((n⊥)T τ(t,x)n
)2dx. (10)
In (9), (10), n = (n1, n2)T is the outward unit normal, n⊥ = (n2, −n1)T is the tangentialdirection, and ω is a non–negative weighting function.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 7
Given JObs we must choose Gad and the regularization term JReg(g) so that (6) is well-posed. As we have indicated earlier, such results are still missing for problems governed bythe compressible Navier–Stokes equations (2)–(4). Therefore our treatment of the infinitedimensional problem is formal. It is motivated by the mathematical theory of optimalcontrol of incompressible Navier–Stokes flow, especially by [17, 18, 23]. In our numericalexperiments, the space of controls is either
Gad =g : g ∈ L2((t0, tf ); H1(Γc)),
g(t,x) = 0 on (t0, tf) × ∂Γc, g(t0,x) = 0 in Γc
,
(11)
Gad =
g : g ∈ L2((t0, tf ); H1(Γc)), ∂∂tg ∈ L2((t0, tf ); L2(Γc)),
g(t,x) = 0 on (t0, tf ) × ∂Γc, g(t0,x) = 0 in Γc
,
(12)
or
Gad =
g : g ∈ L2((t0, tf ); H2(Γc)), ∂∂tg ∈ L2((t0, tf ); L2(Γc)),
g(t,x) = 0, ∇g(t,x) = 0 on (t0, tf ) × ∂Γc, g(t0,x) = 0 in Γc
.
(13)
The space (12) is used in [23] for boundary control problems governed by the incompressibleNavier–Stokes equations. The space (11) is introduced to illustrate the occurrence oftemporal oscillations when no regularization on the time derivative of the control is imposed.In several of our numerical studies, the spatial regularity enforced in (12) was insufficient.This has motivated the choice (13).
In (12), (13) ∇g denotes the gradient of g on the boundary, which in our test problemis given by ∇g = gx1 . The first two conditions in (12) are smoothness conditions on theadmissible controls in space and in time, respectively. The third condition ensures thatthere are no jumps in b + g at (t0, tf ) × ∂Γc. The fourth condition enforces compatibilitybetween the initial velocity field v0 and boundary data b + g. A similar interpretation isvalid for the conditions in (13) except that the required spatial regularity of the controls isone order higher. If our control space is (12), the regularization term JReg in (6) is chosento be
JReg(g) def=∫ tf
t0
∫Γc
(α1
2‖gt‖2
2 +α2
2‖g‖2
2 +α3
2‖∇g‖2
2
)dxdt. (14)
Otherwise, if our control space is (13), the regularization term JReg in (6) is chosen to be
JReg(g) def=∫ tf
t0
∫Γc
(α1
2‖gt‖2
2 +α2
2‖g‖2
2 +α3
2‖∇g‖2
2 +α4
2‖∆g‖2
2
)dxdt. (15)
Here α1, α2, α3, α3 ≥ 0 and ∆g is the Laplacian of g on the boundary, in our case∆g = (0, gx1x1 . We ran experiments without regularization of the derivatives of g, i.e.,with α1 = α3 = α4 = 0 and α2 > 0. In these cases the optimization algorithm producedstrongly oscillatory controls, which frequently led to a blow-up in the flow variablesgenerated by our compressible Navier–Stokes solver. Therefore we use α2, α3 > 0 inall our computations reported here, only α1, α4 ≥ 0 are allowed to be zero. If α1 = 0we do not enforce smoothness of the control in time. In particular the requirements∂∂tg ∈ L2((t0, tf ); L2(Γc)) and g(t0,x) = 0 are dropped from (12), (13). The effect of the

8 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
regularization terms on the computed controls are demonstrated in Section 8. In particular,it will be seen that the computed control can exhibit strong oscillations in time if α1 = 0.
We mention that the choice of the control space Gad also influences the gradient compu-tation as shown in the next section and in Section 5.
3. ADJOINT EQUATION AND GRADIENT FOR AN ABSTRACT PROBLEM
In this section we briefly review the gradient computation using the adjoint equationapproach. The presentation in this section is standard, but it provides a clearer discussionof the gradient computations for the semi-discrete problem in the following section.
Consider the gradient computation for an abstract functionalJ whose evaluation involvesan implicitly defined function. Let G be a Hilbert space with inner product 〈·, ·〉G and letU , C be Banach spaces. We consider an equation C(u, g) = 0, where C : U × G → C.Suppose that for every g ∈ G the equation C(u, g) = 0 has a unique solution u(g). Inour context, C(u, g) = 0 represents the compressible Navier–Stokes equations (2)–(4) ora discretization thereof. We consider the abstract problem
ming∈G
J(g) = J(u(g), g).
In our case J(u(g), g) = JObs(u(g)) + JReg(g), see (6). We assume the existence ofneighborhoods G ⊂ G, U ⊂ U of g and u = u(g), respectively, such that C is Frechet-differentiable. We use subscripts u and g to denote partial Frechet-derivatives with respectto u and g, respectively. Further, we assume that u(g) is differentiable on G. This isguaranteed by the implicit function theorem if C is continuously Frechet-differentiableon U × G and the partial derivative Cu(u, g) is continuously invertible. If J is Frechet-differentiable on U × G, then the Frechet-derivative Jg(g) of J can now be computedfrom
Jg(g)g′ = Ju(u, g)ug(g)g′ + Jg(u, g)g′. (16)
The gradient of J is defined as the vector ∇J(g) ∈ G that satisfies
Jg(g)g′ = 〈∇J(g), g′〉G ∀g′ ∈ G.
The Frechet-derivative (16) is a functional on G and therefore we write Jg(g)g′ =〈Jg(g), g′〉G∗×G , where 〈·, ·〉G∗×G denotes the duality pairing between G∗ and G. Moregenerally, given a Banach space X , X ∗ denotes the dual of X and 〈·, ·〉X ∗×X denotesthe duality pairing between X ∗ and X , i.e., 〈y,x′〉X ∗×X is simply the application of thefunctional y ∈ X ∗ to the vector x′. With this notation, the derivative (16) of J is written as
〈Jg(g), g′〉G∗×G = 〈Ju(u, g),ug(g)g′〉U∗×U + 〈Jg(u, g), g′〉G∗×G (17)
and the gradient ∇J(g) ∈ G of J is defined by
〈Jg(g), g′〉G∗×G = 〈∇J(g), g′〉G ∀g′ ∈ G, (18)
respectively. The Frechet-derivative ug(g) is given by −Cu(u, g)−1Cg(u, g).If there exists an adjoint state λ ∈ C∗ satisfying
〈Cu(u, g)∗λ,ug(g)g′〉U∗×U = 〈−Ju(u, g),ug(g)g′〉U∗×U ∀g′ ∈ G (19)

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 9
or if there even exists an adjoint state λ ∈ C∗ satisfying the adjoint equation Cu(u, g)∗λ =−Ju(u, g) in U∗, i.e.,
〈Cu(u, g)∗λ,u′〉U∗×U = 〈−Ju(u, g),u′〉U∗×U ∀u′ ∈ U , (20)
then we can use (19) and ug(g) = −Cu(u, g)−1Cg(u, g) to write
〈Ju(u, g),ug(g)g′〉U∗×U = −〈Cu(u, g)∗λ,Cg(u, g)g′〉U∗×U= 〈λ, −Cu(u, g)ug(g)g′〉C∗×C= 〈Cg(u, g)∗λ, g′〉G∗×G . (21)
Combining (17), (18), and (20), we see that the gradient ∇J(g) can be computed from
〈∇J(g), g′〉G = 〈Cg(u, g)∗λ+ Jg(u, g), g′〉G∗×G ∀g′ ∈ G, (22)
see (17) and (18). As we will see later, the computation of ∇J(g) satisfying (22) typicallyrequires the solution of a linear system.
We remark that the existence of λ satisfying (20) is ensured if Cu(u, g)∗ is onto. For ourapplication this requirement seems to be too restrictive, since the results in [36, Prop. 4.1]indicate that the solution of the linearized state equation is less regular than the state u aboutwhich the linearization is done. Therefore a more refined analysis than the one presentedhere is needed for the gradient computation on the differential equation level. However,for our purposes the previous setting is sufficient.
The gradient computation can be guided by considering the Lagrangian, which is definedby
L(u, g,λ) = J(u, g) + 〈λ,C(u, g)〉C∗×C . (23)
The adjoint equation (20) is equivalent to
〈Lu(u, g, λ),u′〉U∗×U = 0 ∀u′ ∈ U (24)
and the gradient equation (22) is given by
〈∇J(g), g′〉G = 〈Lg(u, g, λ), g′〉G∗×G ∀g′ ∈ G. (25)
The paper [10] presents a formal application of the above framework to the objectivefunction gradient and the corresponding adjoint equations for (8) governed by the com-pressible Navier–Stokes equations (2)–(4). In the following we apply the above frameworkto the semi-discrete and the fully discrete problem.

10 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
4. SPATIAL DISCRETIZATION
Numerical simulation of aeroacoustic phenomena demands high numerical accuracy(i.e. low dissipation and dispersion) to accurately resolve convective flow-features over awide range of space/time scales and amplitudes. To meet this need, most prior approacheshave utilized high-order accurate finite difference methods such as the compact schemesof Lele [33] and the dispersion relation preserving methods of Tam & Webb [42]. Typi-cally these methods utilize symmetric finite-difference stencils that result in zero inherentnumerical dissipation. While this is desirable for resolved scales, it is well known thatunresolved scales when using high-order methods can eventually corrupt a solution and/orlead to instability if not properly controlled [43]. These error modes stem from a varietyof sources including approximate boundary treatments, mesh stretching, and conflictinginitial and boundary conditions. While it is desirable to prevent these errors at their sourceif possible, for example by improving boundary treatments, most aeroacoustic simula-tions utilize some form of artificial-dissipation and/or filtering to control these numericalerrors. There are, of course, other methods used for aeroacoustic simulation includingcompact upwind differences, ENO/WENO, and discontinuous Galerkin, to name a few,and aeroacoustic simulation is an active area of research with formulations, discretizations,boundary treatments, and filtering approaches under constant development. Our study fo-cuses on the application of optimal control to aeroacoustic problems and for this purpose,we have initially chosen to use a traditional central-finite difference method with explicithigh-wavenumber damping and simple boundary treatments. Inclusion of more advanceddiscretizations, filtering, and boundary treatments in the context of optimal control areavenues for future research.
With this background, our compressible Navier–Stokes flow solver is based on a con-servative extension of the explicit finite-difference method described in [12]. The Navier–Stokes equations are formulated in a generalized coordinate system where the physical do-main is mapped to a computational space; a unit square divided into an equally spaced gridsystem. This transformation allows clustering of grid points in regions of high gradients,simplifies the implementation of the boundary conditions, and allows the code to be usedfor moderately complex geometries. While the code supports optimized finite-differenceswith up to seven point stencils, for this study spatial derivatives are approximated usingstandard fourth-order accurate central differences in the interior with third-order biased andone-sided differences used at boundaries that are designed to enhance stability when usedwith explicit time advancement methods (see [7]). The metrics associated with the gener-alized coordinate transformation are computed using the same finite difference stencils toensure discrete conservation. To suppress the growth of high-wavenumber error modes, afourth-order artificial dissipation term acting on the numerical fluxes is added to the righthand side of the discretized equations. This dissipation term is computed using fourth-order accurate finite-differences and the dissipation parameter, ε, is chosen to damp outthe error modes while avoiding excessive dissipation in the resolved scales as establishedthrough numerical experimentation. Riemann extrapolation is used on far-field boundariesas an approximate non-reflecting boundary condition. Wall boundary conditions are im-posed directly on the velocity components and temperature with density computed using aone-sided approximation of the continuity equation. We reiterate, that while this approachis adequate for the optimal control problems considered here, incorporating higher-orderdiscretizations and boundary treatments is an important area of future research.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 11
5. THE SEMI-DISCRETE PROBLEM
We consider the optimal control problem (6) with state equation (2) and (3) after adiscretization in space has been performed.
The semi-discrete states u and controls g are vector valued functions with
u : [t0, tf ] → IRnu , g : [t0, tf ] → IRng .
We do not introduce different notation, such as superscript h to denote the semi-discretizedstates, controls, etc. The meaning of these variables and functions should be clear fromthe context. We assume that the boundary conditions g(t, x) = 0, x ∈ ∂Γc, and, if (13) isused, ∇g(t, x) = 0, x ∈ ∂Γc, on the control are incorporated into the spatial discretization.The state u is the solution of the semi-discretized Navier–Stokes equations
q(u(t))t + N(u(t), g(t), t) = 0, t ∈ [t0, tf ], (26)
u(t0) = u0. (27)
The function q : IRnu → IRnu represents the discretized conserved variables and N :IRnu × IRng × IR → IRnu represents the inviscid and viscid flux terms as well as boundaryconditions.
We consider objective functions of the form
J(g) = lf (u(tf )) +∫ tf
t0
l(u(t), g(t))dt
+∫ tf
t0
α1
2gt(t)TL1gt(t) +
α2
2g(t)T L2g(t)dt.
(28)
Thus, we allow the possibility that the objective function depends on the value of the flowvariables at the final time and on the flow variables distributed in time. The final timecontribution to the objective is denoted by lf(u(tf )) and the distributed contribution isdenoted by
∫ tf
t0l(u(t), g(t))dt. This enables us to treat objective functions of the type (8)
and (9), (10) simultaneously. In the objective function (28),
lf : IRnu → IR, l : IRnu × IRng → IR,
and L1,L2 ∈ IRng×ng are symmetric matrices. The matrix L1 is such that gt(t)T L1gt(t)is a discretization of
∫Γc
‖gt(t,x)‖22dx. The matrix L2 is such that g(t)T L2g(t) is a
discretization of∫Γc
‖g(t,x)‖22 + ‖∇g(t,x)‖2
2dx or of∫Γc
‖g(t,x)‖22 + ‖∇g(t,x)‖2
2 +‖∆g(t,x)‖2
2dx, depending on whether (14) or (15) is used. The matrices L1, L2 alsoincorporate the boundary conditions g(t, x) = 0, x ∈ ∂Γc. If the control space (13)and regularization term (15) are used, L1, L2 also incorporate the boundary conditions∇g(t, x) = 0, x ∈ ∂Γc. Thus, L1 is a mass matrix on the boundary and L2 is the sumof a mass matrix and a stiffness matrix on the boundary. To simplify the presentation, wehave assumed that α2 = α3 and that α2 = α3 = α4 if α4 > 0. In our implementationwe allow all parameters α1, . . . , α4 to be different. In this section, however, distinguishingbetween α2, α3, and α4 would generate significant notational burden without providingany additional insight.

12 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
To summarize, after a discretization in space, the optimal control problem can be writtenas
min J(g) = lf (u(tf )) +∫ tf
t0
l(u(t), g(t))dt
+∫ tf
t0
α1
2gt(t)T L1gt(t) +
α2
2g(t)TL2g(t)dt
(29)
subject to the compatibility condition
g(t0) = 0 (30)
on the control (cf., (12), (13)), where u is the solution of (26), (27).The semi–discrete version of the the control spaces (11)–(13) are
Gad =g :
∫ tf
t0
g(t)T L2g(t)dt < ∞
(31)
and
Gad =g :
∫ tf
t0
gt(t)T L1gt(t) + g(t)T L2g(t)dt < ∞, (32)
where (31) corresponds to (11) and (32) corresponds to both (12) and (13) (since we do notdistinguish between α2, α3, and α4). The semi–discrete control spaces (31) and (32) areequipped with inner products
〈g1, g2〉G =∫ tf
t0
(g1)t(t)T L1(g2)t(t) + g1(t)T L2g2(t)dt (33)
and
〈g1, g2〉G =∫ tf
t0
g1(t)T L2g2(t)dt, (34)
respectively.As in Section 3, we use subscripts to denote partial derivatives. For example,Ng(u(t), g(t), t)
denotes the partial derivative of N with respect to g and ∇gl(u(t), g(t)) denotes the partialgradient of l with respect to g.
5.1. Gradient Computation for the Semidiscrete ProblemFor the numerical solution of (26)–(28) we need the gradient of the objective function
J . We apply the framework of Section 3 to the gradient computation of J . Given aninner product 〈·, ·〉G on the space G of controls, the gradient (with respect to this innerproduct) is a function denoted by (∇J(g))(t) such that the Frechet-derivative Jg of J canbe represented as
Jg(g)g′ = 〈∇J(g), g′〉G (35)
for all admissible variations g′ of the control. The choice of the inner product partly deter-mines the conditioning of the problem and it can significantly influence the performance ofgradient based optimization algorithms (see [28]). However, often little attention is paid tothe choice of the inner product for the numerical solution of optimal control problems and

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 13
in many cases the inner product is simply chosen to be 〈g1, g2〉 =∫ tf
t0g1(t)T g2(t)dt. We
discuss the gradient computation with respect to the inner products (33) and (34).
5.1.1. Case α1 > 0The Lagrangian for (26)–(28) is given by
L(u, g,λ,λ0) = lf (u(tf ), tf ) +∫ tf
t0
l(u(t), g(t))dt
+∫ tf
t0
α1
2gt(t)T L1gt(t) +
α2
2g(t)TL2g(t)dt
+∫ tf
t0
λ(t)T (q(u(t))t + N(u(t), g(t), t)) dt + λT0 (u(t0) − u0).
(36)The adjoint equations are obtained by setting the derivative of the Lagrangian (36) withrespect to u equal to zero. After integration by parts, this yields that λ is the solution ofthe adjoint equation
−M(u(t))Tλt(t) = −∇ul(u(t), g(t)) − Nu(u(t), g(t), t)Tλ(t), (37)
t ∈ [t0, tf ], where
M(u(t)) =d
duq(u(t)), (38)
with final conditions
M(u(t))Tλ(tf ) = −∇ulf(u(tf ), tf ). (39)
Furthermore, λ0 = M(u(t0))Tλ(t0).The derivative of (28) is obtained by differentiating the Lagrangian (36) with respect to
g. Thus,
Jg(g)g′ =∫ tf
t0
∇gl(u(t), g(t))T g′(t) + α1gt(t)T L1g′t(t) + α2g(t)TL2g
′(t)
+λ(t)T Ng(u(t), g(t), t)g′(t)dt,
(40)
where λ is the solution of the adjoint equation (37), (39). The right hand side in (40)corresponds to the the right hand side in (25). To compute the gradient of (28) with respectto the inner product (33) we need to determine a function k such that
Jg(g)g′ = 〈k, g′〉G =∫ tf
t0
kt(t)T L1(g′)t(t) + k(t)T L2g′(t)dt (41)
for all g′ (cf. (25)). In this case,
∇J(g) = k. (42)
It is easy to check that the solution k of
−L1ktt(t) + L2k(t) = −α1L1gtt(t) + α2L2g(t) + ∇gl(u(t), g(t))+Ng(u(t), g(t), t)Tλ(t), t ∈ [t0, tf ],
k(t0) = 0,
kt(tf ) = α1gt(tf )
(43)

14 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
satisfies (41).
5.1.2. Case α1 = 0.
If no regularization is imposed on the time derivative of the control, the adjoint equationsfor (26)–(28) are still (37) with final conditions (39) and the derivative of J is given by(40) with α1 = 0. However, the gradient of J in (28) in the inner product (34) is given by∇J(g) = k, where k satisfies
∫ tf
t0k(t)T L2g
′(t)dt =∫ tf
t0
∇gl(u(t), g(t))T g′(t) + α2g(t)T L2g′(t)
+λ(t)T Ng(u(t), g(t), t)g′(t)dt
for all g′, i.e.,
∇J(g) = L−12
[α2L2g + ∇gl(u, g) + Ng(u, g, ·)Tλ
]. (44)
5.2. Problem Reformulation5.2.1. Case α1 > 0.
The system (43) is a semi–discretization of an elliptic equation in Γc × (0, T ). Forsimple time and spatial discretizations this equation can be solved using standard iterativetechniques or sparse direct solvers (see, e.g., [23]). However, if higher order spatial andtime discretization are applied, then the solution of (43) is cumbersome. We would like toavoid it. Moreover, we need to ensure that the discretization of the objective function (28)is consistent with the time-discretization of (26). Therefore, we reformulate (26)–(28) intoan equivalent problem.
We introduce the additional variables
h(t) = gt(t)
and
w(t) =∫ t
t0
(l(u(τ), g(τ)) +
α1
2h(τ)T L1h(τ) +
α2
2g(τ)T L2g(τ)
)dτ.
Since the time derivative is applied to the conserved variables q we view the primitivevariables u as functions of the conserved variables q. Thus, we rewrite (26)–(28) as
min J(h) = lf(u(q(tf )), tf ) + w(tf ) (45)
with state equations
zt(t) = r(z(t), h(t), t), t ∈ [t0, tf ],z(t0) = z0,
(46)
where
r(z(t), h(t), t) =
l(u(q(t)), g(t)) + α12 h(t)T L1h(t) + α2
2 g(t)T L2g(t)−N(u(q(t)), g(t), t)
h(t)
(47)

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 15
and
z(t) =
w(t)q(t)g(t)
, z0 =
0q(u0)
0
. (48)
In the reformulation (45)–(48) of (26)–(28) z plays the role of the state and h plays the roleof the control. We define
f(z(tf ), tf ) = lf(u(q(tf )), tf ) + w(tf ) (49)
so that the objective (45) can be written as
min J(h) = f(z(tf ), tf ). (50)
The inner product for the new controls is given by
〈h1, h2〉 =∫ tf
t0
h1(t)T L1h2(t)dt. (51)
The Lagrangian function for (46) and (50) is given by
L(z, h,π,π0) = f(z(tf ), tf ) + πT0 (z(t0) − z0)
+∫ tf
t0
π(t)T (zt(t) − r(z(t), h(t), t)) dt. (52)
The adjoint equations are
−πt(t) = rz(z(t), h(t), t))Tπ(t), t ∈ [t0, tf ],π(tf ) = −∇zf(z(tf ), tf ).
(53)
Furthermore, π0 = π(t0).The gradient ∇J(h) satisfies
〈∇J(h), h′〉 = Lh(z, h,π,π0)h′ ∀h′, (54)
where
Lh(z, h,π,π0)h′ =∫ tf
t0
−π(t)T rh(z(t), h(t), t)h′(t)dt
(cf. (51)). Equation (54) corresponds to (25). Since the inner product is given by (51), thegradient (∇J(h)) is determined from∫ tf
t0
(∇J(h))(t)T L1h′(t)dt =
∫ tf
t0
−π(t)T rh(z(t), h(t), t)h′(t)dt ∀h′,
i.e.,
(∇J(h))(t) = −L−11 rh(z(t), h(t), t)Tπ(t). (55)

16 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
If we set π = (θ,λ,ψ)T , u(t) = u(q(t)), and use (47) and (49), then the adjoint equation(53) is
−θt(t) = 0,
−M(u(t))Tλt(t) = ∇ul(u(t), g(t))θ(t) − Nu(u(t), g(t), t)Tλ(t),−ψt(t) = α2L2g(t)θ(t) + ∇gl(u(t), g(t))θ(t) − Ng(u(t), g(t), t)Tλ(t),
(56)for t ∈ [t0, tf ] with final conditions θ(tf )
λ(tf )ψ(tf )
=
−1−M(u(t))−T ∇ulf(u(tf ), tf )
0
. (57)
Using the definition (47) of r and π = (θ,λ,ψ)T , we see that the gradient (55) is given by
(∇J(h))(t) = −L−11 (α1θ(t)L1h(t) +ψ(t)) . (58)
We conclude this subsection with a comparison of the original formulation (26)–(28)and the reformulation (45), (46). The first lemma essentially states that the linearizationsof (28) and of (45) are the same. This is no surprise, since (45), (46) is an equivalentreformulation of (26)–(28). The left hand side in equation (59) below is the linearization of(28) expressed using the gradient of J in the scalar product (33), whereas the right hand sidein (59) is the linearization of (45) expressed using the gradient of J in the scalar product(51).
Lemma 5.1. Let h = gt and 〈·, ·〉G be defined by (33). The gradients ∇J(g) and∇J(h) defined in (42) and (58), respectively, satisfy
〈∇J(g), g′〉G =∫ tf
t0
(∇J(h))(t)T L1h′(t)dt (59)
for all h′ and g′ with g′t = h′ and g′(t0) = 0.
Proof. From (56) and (57) we see that θ(t) = −1. Hence the equations for λ in (56)and (57) are identical to (37), (39). The definitions (58) of ∇J(h) and (51) of the h–innerproduct imply that
〈∇J(h), h′〉 =∫ tf
t0α1h(t)T L1h
′(t) −ψ(t)T h′(t)dt
=∫ tf
t0α1gt(t)T L1g
′t(t) −ψ(t)T g′
t(t)dt
=∫ tf
t0α1gt(t)T L1g
′t(t) +ψt(t)T g′(t)dt −
[ψ(t)T g′(t)
]tf
t=t0.
(60)
If we insert the equations for ψ in (56) and use g′(t0) = ψ(tf ) = 0, θ(t) = −1, we seethat the last equation in (60) is identical to (40). The assertion follows from Jg(g)g′ =
〈∇J(g), g′〉G , see (41)–(43).
In the reformulation (45), (46) the optimization variable is h = gt. After a timediscretization is performed, this corresponds to a scaling of the optimization variable suchas those described in [16, Sec. 7.1]. If g∗ is the solution of (26)–(28), then h∗ = (g∗)t

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 17
solves (45), (46). In this sense the reformulation does not change the solution of theproblem. However, if a gradient method or a nonlinear conjugate gradient method isused, then the iterates are not scaling invariant. In the context of the gradient method (thefirst step of a nonlinear conjugate gradient method is a gradient step) this means that ifg+ = g − γ∇J(g) is the new iterate generated by the gradient method applied to (26)–(28)and if h+ = h − γ∇J(h) is the new iterate generated by the gradient method applied to(45), (46), then h+ 6= (g+)t even if h = (g)t (see [16, Sec. 7.1] and the lemma below).The same is also true if a quasi-Newton method is used to solve the optimization problems,unless the quasi-Newton matrices are properly scaled (see [16, Sec. 8.3], [28, Appendix]).
Lemma 5.2. Let h = gt. If ∇J(g), ∇J(h) are the gradients given in (42) and (58),respectively, then
(∇J(g))t(t) = (∇J(h))(t) −∫ tf
t
L−11 L2(∇J(g))(s)ds. (61)
Proof. Let k = ∇J(g). Since k solves (43) we have
L1kt(t) = −∫ tf
t
L1kss(s)ds + L1kt(tf )
=∫ tf
t
−L2k(s) − α1L1gss(s) + α2L2g(s) + ∇gl(u(s), g(s))
+Ng(u(s), g(s), s)Tλ(s)ds + L1kt(tf )
= α1L1gt(t) +∫ tf
t
−L2k(s) + α2L2g(s) + ∇gl(u(s), g(s))
+Ng(u(s), g(s), s)Tλ(s)ds.
Using the solution component θ(t) = −1 and ψ of (56) and (57), we obtain
L1kt(t) = α1L1gt(t) −∫ tf
t
L2k(s)ds +∫ tf
t
ψs(s)ds
= α1L1gt(t) −ψ(t) −∫ tf
t
L2k(s)ds
= L1(∇J(h))(t) −∫ tf
t
L2k(s)ds
where we have used (58) to obtain the last equality. This proves the desired equation(61).
5.2.2. Case α1 = 0.
If α1 = 0 the gradient computation requires the solution of a linear system with systemmatrix L2 at every time step, see (44). In our case L2 is a band matrix and these solvescan be easily accomplished. However as in the case α1 > 0 we need to ensure that thediscretization of the objective function (28) is consistent with the time-discretization of(26). Therefore, we again reformulate (26)–(28). We define w as before and we set
r(z(t), g(t), t)) =(
l(u(q(t)), g(t)) + α22 g(t)T L2g(t)
−N(u(q(t)), g(t), t)
)(62)

18 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
and z = (w,q)T , z0 = (0,q(u0))T . In this abstract setting our control problem can againbe formulated as
min J(g) = f(z(tf ), tf ), (63)
where f is defined in (49) and where z solves
zt(t) = r(z(t), g(t), t)), t ∈ [t0, tf ],z(t0) = z0.
(64)
Thus, using the abstract notation allows us to treat both cases simultaneously. We onlyhave to substitute (62) for (47) and g for h. For example the adjoint equations for (63)–(64)are
−πt(t) = rz(z(t), g(t), t))Tπ(t), t ∈ [t0, tf ],π(tf ) = −∇zf(zNt , tf).
(65)
If we set π = (θ,λ)T , u = u(q(t)), then the adjoint equation (66) is
−θt(t) = 0,
−M(u(t))Tλt(t) = ∇ul(u(t), g(t))θ(t) − Nu(u(t), g(t), t)Tλ(t),(66)
for t ∈ [t0, tf ] with final conditions(θ(tf )λ(tf )
)=
( −1−M(u(t))−T ∇ulf(u(tf ), tf )
). (67)
In particular, θ(t) = −1.The gradient of J(g) in (63) has to satisfy
〈∇J(g), g′〉 =∫ tf
t0
−π(t)T rg(z(t), g(t), t)g′(t)dt ∀g′.
We want the gradient of J(g) with respect to the inner product (34). It is given by
(∇J(g))(t) = −L−12
( ∇gl(u(t), g(t)) + α2L2g(t)−Ng(u(t), g(t), t)
)T (θ(t)λ(t)
), (68)
where we have used the definition (62) of r. From (66) and (67) we see that θ(t) = −1.Hence (68) and (44) are equivalent. Since the reformulation for the case α1 = 0 leavesthe optimization variables unchanged, the optimization iterates for the solution of (29) and(63) are identical.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 19
6. TIME-DISCRETIZATION
For the discretization of the state equation we use a Runge–Kutta method with coefficients
c1 a11 a12 . . . a1s
......
......
cs as1 as2 . . . ass
b1 b2 . . . bs
(69)
and time steps t0 < t1 < . . . < tNt = tf . We set ∆tn = tn+1 − tn. In our computationalexperiments we use the classical fourth order explicit Runge–Kutta method. In this cases = 4 and only a21, a32, a43 6= 0. This structure, as well as the structure in the right handside (47) or (62) of the state equation is exploited in our implementation. However, for ourdiscussion of the time discretization, this is not important and therefore we treat the generalcase. More details are given in [11].
Remark. Our abstract notation allows us to treat both cases, α1 > 0 and α1 = 0,simultaneously. The notation used in this section follows (45), (46). In particular thecontrol is denoted by h. If we consider the case α1 = 0 we only have to substitute (62) for(47) and g for h.
The Runge–Kutta method introduces intermediate time locations
tni = tn + ci∆tn.
We let zn be approximations of the states at tn, n = 1, . . . , Nt, and we introduce controlshni, i = 1, . . . , s, n = 0, . . . , Nt − 1.
The discretized optimal control problem (45)–(46) is given by
min J(h) = f(zNt , tf ), (70)
where
zn+1 = zn + ∆tn
s∑i=1
bir(Zni, hni, tni) (71)
Zni = zn + ∆tn
s∑j=1
aijr(Znj , hnj, tnj), (72)
i = 1, . . . , s, n = 0, . . . , Nt − 1.In the fully discretized control problem, we view (71) and (72) as the state equations.
Thus, zn, n = 0, . . . , Nt, and Zni, i = 1, . . . , s, n = 0, . . . , Nt − 1, are the states and hni,i = 1, . . . , s, n = 0, . . . , Nt − 1, are the controls.
We point out that the discrete controls hni can, and often are poor approximations ofthe control h at tni. Actually, for some Runge–Kutta methods such as the classical RungeKutta method, tni = tnj for some i 6= j, but in general one has hni 6= hnj . In [25], Hagershows how to compute an approximation hn of the control h at tn. The ‘discrete controls’hni should be viewed as artificial variables needed to obtain good approximations of the

20 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
states and good approximations of the adjoints from which good approximations of thecontrols can be computed, see also Section 6.2 below.
6.1. The Adjoint Equation and the Gradient for the Fully Discretized ProblemThe Lagrangian function for (70)–(72) is given by
L(z, h,Z,π,Π) = f(zNt , tf ) +Nt−1∑n=0
πTn+1
[zn+1 − zn − ∆tn
s∑i=1
birni
]
+Nt−1∑n=0
s∑i=1
ΠTni
Zni − zn − ∆tn
s∑j=1
aijrnj
,
(73)
where rni = r(Zni, hni, tni)The adjoint equations are obtained by differentiating the Lagrangian function (73) with
respect to zn, n = 1, . . . , Nt, Zni, i = 1, . . . , s, n = 0, . . . , Nt − 1, and setting thederivatives to zero. This gives the adjoint equations
πn = πn+1 +s∑
i=1
Πni, (74)
n = 1, . . . , Nt − 1, and
Πni = rz(Zni, hni, tni)T ∆tn[biπn+1 +∑s
j=1 ajiΠnj ], (75)
i = 1, . . . , s, n = 0, . . . , Nt − 1, with
πNt = −∇zf(zNt , tNt). (76)
The ni-th partial derivative of J(h) in (70) is obtained by differentiating the Lagrangianfunction (73) with respect to hni. This yields
ddhni
J(h) = −rh(Zni, hni, tni)T ∆tn[biπn+1 +∑s
j=1 ajiΠnj ], (77)
i = 1, . . . , s, n = 0, . . . , Nt − 1. These partial derivatives are the components of thegradient with respect to the Euclidean inner product 〈h1, h2〉 = hT
1 h2, where hj is a
vectors of components h(j)ni , i = 1, . . . , s, n = 0, . . . , Nt − 1. This is commonly used
in practice. However, this gradient is highly mesh dependent and can lead to artificialill-conditioning in the problem. Instead, we use discrete versions of the inner products (51)and (34).
Gradient computation in the case α1 > 0:The discretized version of the inner product (51) is
〈h1, h2〉 =Nt−1∑n=0
s∑i=0
∆tnbi(h(1)ni )T L1h
(2)ni (78)
and the gradient of (70) with respect to this inner product is the vector
∇J(h) =(
1∆tnbi
L−11
d
dhniJ(h)
)n=0,...,Nt−1
i=1,...,s
, (79)

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 21
where ddhni
J(h) is given by (77). We have assumed that b1, . . . , bs 6= 0, which is the casefor the classical fourth order Runge Kutta method.
Gradient computation in the case α1 = 0:The discretized version of the inner product (34) is
〈g1, g2〉 =Nt−1∑n=0
s∑i=0
∆tnbi(g(1)ni )T L2g
(2)ni , (80)
and the gradient of (70) with respect to this inner product is the vector
∇J(g) =(
1∆tnbi
L−12
d
dhniJ(g)
)n=0,...,Nt−1
i=1,...,s
, (81)
where ddhni
J(g) is again given by (77) with h replaced by g.
6.2. Computation of Approximate Optimal ControlsAs we have pointed out earlier, the discrete ‘controls’ hni can be poor approximations
of the controls h(t) at t = tni. They are needed to compute good approximations zn,n = 1, . . . , Nt, of the states and good approximations πn, n = 1, . . . , Nt, of the adjoints.After a local minimum of the fully discretized problem (70)–(72) has been found andthe corresponding states z∗
n, n = 1, . . . , Nt, and adjoints π∗n, n = 1, . . . , Nt, have been
computed from (71), (72), (74), (75), approximations h∗n of the controls h∗(t) at t = tn
can be computed by solving the minimization problems
minhn
(π∗n)T r(z∗
n, hn, tn), n = 0, . . . , Nt − 1. (82)
Case α1 > 0:If we set π∗
n = (θ∗n,λ∗
n,ψ∗n)T and use the structure of r in (47), then the appropriate
approximation of the optimal control h∗(t) at t = tn is
h∗n = − 1
α1θ∗n
L−11 ψ∗
n, n = 0, . . . , Nt − 1. (83)
Case α1 = 0:We replace h by g, see Remark 6, and we set π∗
n = (θ∗n,λ∗
n)T . If l in (28) is independent ofg and if N(u, g, t) is linear in g, which is both the case in all our examples, then we can usethe structure of r in (62) to solve (82) explicitly. In this case the appropriate approximationof the optimal control g∗ at tn is
g∗n =
1α2θ∗
n
L−12 Ng(u∗
n, gn, tn)Tλ∗n, (84)
n = 0, . . . , Nt − 1, where u∗n = u(q∗
n). Note that because of our linearity assumption,Ng(u, g, t) does not depend on g.
In [25] it is proven that under suitable assumptions on (45)–(46) the errorsmax0≤n≤Nt ‖h∗
n − h∗(tn)‖, max0≤n≤Nt ‖z∗n − z∗(tn)‖, max0≤n≤Nt ‖π∗
n −π∗(tn)‖ areof the same order. The order of approximation depends on the order of the Runge–Kutta

22 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
method (69) applied to the optimal control problem and the regularity in time of the optimalcontrol of (45), (46). The order conditions for the Runge–Kutta method (69) applied tothe optimal control problem include the order conditions for the Runge–Kutta method (69)applied to the state equation (46). However, they also include other conditions that neednot be met if the Runge–Kutta method is just applied to solve a single state equation (46).Order conditions for Runge–Kutta methods (69) applied to the optimal control problem arelisted in [25]. They are satisfied by the explicit classical fourth order Runge–Kutta methodused in our numerical examples.
6.3. Transformation of the Adjoint Equation and the Gradient for the FullyDiscretized Problem
For theoretical and also implementation reasons it is more favorable to transform theadjoint equations (74)–(76) so that the transformed adjoint equations admit the form ofRunge–Kutta method. This transformation is well known, see, e.g., the papers [5, 24, 25],some details in our problem context are presented in [11].
We remark that if one has a Fortran or C/C++ code for the solution of (71), (72) andthe subsequent evaluation of the objective (70), and if one uses reverse mode automaticdifferentiation (AD) [1], [21, Ch. 3] to compute gradients, then the AD tool will generateand solve (74)–(76), and it will compute the partial derivatives from (77). In our case thetime discretization poses few challenges when computing adjoints. We use AD only tocompute derivative information at a fixed time t. Specifically, we use reverse mode AD toolTAMC [20] to compute products rz(Zni, hni, tni)T v or rh(Zni, hni, tni)T v for a givenvector v (cf. (75), (77)).
7. OPTIMIZATION ALGORITHM
Our numerical results are produced using a nonlinear conjugate gradient algorithm(e.g., [38]) for the solution of the discretized problem (70)–(72). However, we use the innerproducts (78) or (80) instead of the standard Euclidean inner product and our gradients arecomputed from (79) or (81), respectively. We noticed that even in the case α1 > 0 use ofthe inner product (80) instead of (78) was more effective in the nonlinear conjugate gradientmethod. The following computations use (80) and the corresponding gradient (81) in bothcases, α1 > 0 and α1 = 0. The inner product acts as a preconditioner within the nonlinearconjugate gradient algorithm. Thus, it effects the convergence behavior of the algorithms,but it does not alter the solution of the problem. The choices (78) or (80) minimizethe mesh-dependent behavior of the algorithms and avoid artificial ill-conditioning due todiscretization.
In addition to the nonlinear conjugate gradient algorithm, we have also experimentedwith the limited memory BFGS methods (e.g., [38]), and even extended the latter algorithmto handle bound constraints on the control. Those results will be presented elsewhere.
To cope with the very large size of state and control variables, we apply a simple storagemanagement technique. More sophisticated storage management techniques, which willbe considered in the future, are discussed in [2, 40].
All computations are performed in parallel using OpenMP on the SGI Origin 2000.We remark that the solution of one adjoint equation, where spatial adjoints are computedusing the AD tool TAMC [20] is about four times as expensive as the solution of one stateequation (compressible Navier–Stokes equation).

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 23
8. RESULTS
The optimal control formulation described above is now applied to the vortex-wallinteraction problem. The initial flow field is determined by the superposition of twocompressible Oseen vortices [13]. The initial vortex core radii are L∗ and the maximumazimuthal velocity v∗
θmat the edge of the viscous core of each vortex at the initial time are
the length and velocity scales chosen for the nondimensionalization of the Navier–Stokesequations. Thus, the reference Reynolds and Mach numbers are defined as
Re =ρ∗∞L∗v∗
θm
µ∗∞, M =
v∗θm√
γR∗T ∗∞,
where ρ∗∞, µ∗∞, and T ∗∞ are the density, viscosity, and temperature far from the vortices;R∗ is the gas constant; and “*” denotes dimensional quantities.
Our computational domain is [−15, 15] × [0, 15] in non-dimensional units and at timet = 0 the vortices are centered at (±2, 7.5). Although each individual Oseen vortex is asolution to the Navier–Stokes equations, the superposed field does not satisfy the equationsof motion due to the nonlinearity of the convective term and it also fails to satisfy thewall no-slip and thermal boundary conditions. Hence, the flow is advanced a number oftime steps until time t0 to let the transients associated with these incompatibilities leavethe domain through the top and sides where a non-reflecting boundary treatment is used.The resulting field at time t0 is taken as the initial condition to our problem. The Mach,Reynolds, and Prandtl numbers are M = 0.5, Re = 25, Pr = 1, respectively. As stated inthe introduction, for the demonstration problems presented here, constant Prandtl numberand fluid properties (viscosities and thermal conductivity) are assumed along with Stokeshypothesis for the second coefficient of viscosity, λ = −2µ/3.
In all cases, the control g is the wall-normal velocity which is a function of the wallcoordinate and time. Positive g represents injection (blowing) of fluid into the domainwhile negative g corresponds to suction of fluid out of the domain [cf. equation (5)]. Itis assumed that the injected/ingested fluid is always in thermal equilibrium with the solidsurface.
8.1. Optimal Control of Heat TransferThe motivation for this test case is to investigate the possibility of controlling the heat
transfer across an isothermal solid wall in a time interval of interest by applying unsteadywall-normal velocity control. This test problem demonstrates how the coupling of thermo-dynamic and kinematic flow variables through the compressible Navier–Stokes equationscan be used to effectively control one with the other.
The objective functional is given by (6) with (9). The regularization termin (6) is given by (14) or by (15). Suction/blowing is applied only onthe portion Γc = x = (x1, 0) : x1 ∈ [−11.25, 11.25] of the lower wall Γ =x = (x1, 0) : x1 ∈ [−15, 15]. Moreover, the normal derivative is only controlled overthe same part of the lower boundary, i.e., Γ0 = Γc in (9). The weighting function ω is asmooth function which is zero at x1 = ±11.25 and one on [−9, 9]. The term ω∂T/∂n inthe objective contributes to adjoint boundary conditions on Γ0 ⊂ Γ, but not outside Γ0.If the weighting were ω ≡ 1, then the adjoint boundary conditions can and usually doexhibit jumps at x = (±11.25, 0). The addition of the smooth weighting function withω(±11.25) = 0 avoids these jumps in the adjoint boundary conditions.

24 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
The lower wall is isothermal while an inviscid characteristic based far-field boundarycondition is imposed on the other boundaries. The temperature boundary condition at thelower wall is T (x, t) = Tb(x), x ∈ Γc, where Tb is a continuously differentiable functionwith Tb(x) = 1.5, x ∈ Γc and Tb(x) = 2, x = (±15, 0). This temperature profile ensurescompatibility with the far-field temperature at (±15, 0).
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
FIG. 1. Distribution of wall normal temperature gradient, ∂T/∂n, at the wall for the uncontrolled flow.
In all computations for this test case, we use a mesh with 128 grid points in the x- andy-directions. A uniform mesh is used in the x-direction while the mesh is clustered in they-direction near the wall using an algebraic stretching function in order to better capture thewall-normal temperature gradient. The resulting mesh size ∆y at the wall is 0.37 times thatof a uniform mesh, i.e., ∆y = 0.37∗15/128. The time step is ∆t = 0.025. To compute theinitial conditions, the flow equations are advanced for 600 time steps to minimize effectsresulting from the startup transient. The optimal controls are computed over 800 time steps,i.e., t0 = 15 to tf = 35. The enstrophy peak of the uncontrolled flow lies within this timewindow, see Figure 1 in [11].
In our first four runs we use the control space (12) and the regularization term (14). Thelast two runs use the control space (13) and the regularization term (15) The first two runsdo not include a regularization of the time derivative of the control, the other four do. Thecoefficients αj in the regularization term for the runs are given in Table 1.
The uncontrolled flow is given in Figure 1 which shows the wall-normal temperaturegradient ∂T/∂n = −∂T/∂x2 on the bottom wall that is proportional to the heat transferfrom the fluid to the wall, q = −κ∂T/∂n. Since n is the outward unit normal, ∂T/∂n > 0denotes heat transfer from the wall to the fluid. Since the uncontrolled wall is cool,the nominal heat transfer is from the flow to the wall as indicated in Figure 1 by thepredominately negative ∂T/∂n. Since the vortex cores are lower in temperature than theambient fluid, there is a local reduction in heat transfer near the vortex core locations whichcan be easily tracked in Figure 1.
Heat transfer results for the controlled flows are shown in Figure 2. Keep in mind thatwe only control ∂T
∂n over Γc = x = (x1, 0) : x1 ∈ [−11.25, 11.25]. In this region of the

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 25
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
a) α1 = 0, α2 = α3 = 0.5, α4 = 0.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
b) α1 = 0, α2 = α3 = 0.05, α4 = 0.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
c) α1 = α2 = α3 = 0.5, α4 = 0.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
d) α1 = α3 = 0.5, α2 = 0.05, α4 = 0.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
e) α1 = α2 = α3 = 0.5, α4 = 0.05.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
-10
0
10
X
15
20
25
30
35
time
∂T/∂n
f) α1 = α3 = 0.5, α2 = 0.05, α4 = 0.05.FIG. 2. Distribution of wall normal temperature gradient, ∂T/∂n, at the wall for flows with heat transfer
control.
wall, (∂T∂n )2 is reduced nicely by all controls. For runs (a) and (b), where no time-derivative
regularization term (α1 = 0) is enforced, (∂T∂n )2 is large for a small time near t0. Actually
in that time region for runs (a) and (b), the controlled (∂T∂n )2 is larger than in the no-control
flow. Nevertheless, the control substantially reduces the integral (9) in all cases (see Table 2below). The sudden changes in the wall-normal temperature gradient for the runs withouttime regularization are directly related to sudden changes in the controls for these flows.

26 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
-0.1
0
0.1
0.2
0.3
-10
0
10X
15
20
25
30
35
time
Control, g
a) α1 = 0, α2 = α3 = 0.5, α4 = 0
-0.1
0
0.1
0.2
0.3
-10
0
10X
15
20
25
30
35
time
Control, g
b) α1 = 0, α2 = α3 = 0.05, α4 = 0
-0.1
0
0.1
0.2
0.3
-10
0
10X
15
20
25
30
35
time
Control, g
c) α1 = α2 = α3 = 0.5, α4 = 0
-0.1
0
0.1
0.2
0.3
-10
0
10X
15
20
25
30
35
time
Control, g
d) α1 = α3 = 0.5, α2 = 0.05, α4 = 0
-0.1
0
0.1
0.2
0.3
-10
0
10X
15
20
25
30
35
time
Control, g
e) α1 = α2 = α3 = 0.5, α4 = 0.05
-0.1
0
0.1
0.2
0.3
-10
0
10X
15
20
25
30
35
time
Control, g
f) α1 = α3 = 0.5, α2 = 0.05, α4 = 0.05FIG. 3. Optimal control distributions for heat transfer control.
The computed controls are shown in plots (a)-(d) of Figure 3. Since control is onlyapplied over Γc the wall-normal velocity is zero elsewhere. We see that the structure of theoptimal controls computed using a time derivative regularization (α1 > 0) is fundamentallydifferent from those computed without time derivative regularization (α1 = 0). This followsalready from the optimality conditions ∇J(g) = 0 using (37), (43) for the case α1 > 0and (37), (44) for the case α1 = 0. The computed controls for α1 = 0 change rapidly intime near t0 and near tf and they exhibit slight oscillations elsewhere in time. This can bebetter seen in Figure 4, where a slice of the controls at x = 0 is plotted.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 27
TABLE 1
Regularization parameters used in the boundary control of wall-normal temperature.Run α1 α2 α3 α4
a 0 0.5 0.5 0b 0 0.05 0.05 0c 0.5 0.5 0.5 0d 0.5 0.05 0.5 0e 0.5 0.5 0.5 0.05f 0.5 0.05 0.5 0.05
time
Con
trol,
g
0 200 400 600 8000
0.05
0.1
0.15
0.2
0.25
0.3
Run (a)Run (b)Run (c)Run (d)Run (e)Run (f)
FIG. 4. Comparison of optimal controls at x = 0 for heat transfer control.
The controls without time regularization can exhibit large temporal derivatives that notonly may cause numerical difficulties but which would also place undue demands onthe design of physical actuators for problems of this type. A regularization of the timederivative of the controls enforces temporal smoothness. However, close inspection ofthe optimal controls computed with time regularization in runs (c) and (d) reveal slightspatial oscillations in these optimal controls. See plots (c) and (d) in Figure 3. Moreover,all optimal controls may increase sharply near the endpoints x1 = ±11.25 of the controlboundary Γc. To suppress oscillations and to avoid a sharp increase in the horizontalvelocity near the boundary points (x1, x2) = ±(11.25, 0) we switch to the control space(13) and the regularization term (15). The regularization parameters for the two additionalruns (e) and (f) are listed in Table 1. The optimal controls for these runs are shown inplots (e) and (f) of Figure 3. We see that spatial oscillations are suppressed and the spatialtransition from the no-control to the control boundary is smoother than in runs (c) and (d).The additional control regularization has little effect on the total heat transfer as can beseen in Figure 2.
Tables 2 and 3 show the values of the objective functional (6) with (9) at the initial iterate,i.e., zero control (J0) and at the final control iterate, (Jfinal), in addition to the values of the(9) and those for the individual regularization terms at the final control.
Overall, the RMS heat transfer is typically reduced by approximately 93% for thecontrolled flows. The slight additional reduction in heat transfer for the flows without timeregularization is likely due to the fact that these flows have large controls near t0, however

28 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
X
Y
-15 -10 -5 0 5 10 150
5
10
15
a) No control, t = t0.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
b) Optimal control, run (a), t = t0.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
c) No control, t = t0 + 12.5.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
d)Optimal control, run (a), t = t0 + 12.5.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
e) No control, t = tf .
X
Y
-15 -10 -5 0 5 10 150
5
10
15
f) Optimal control, run (a), t = tf .FIG. 5. Temperature contours for the uncontrolled flow and heat transfer control flow, run (a). There are 25
evenly spaced contours from 1.4 to 2.1.
TABLE 2
Objective function values for different regularization parameters.Run J0 Jfinal
12
∫ω(∂T
∂n )2
a 53.970 3.650 2.560b 53.970 2.807 2.609c 53.970 4.781 4.159d 53.970 3.435 3.055e 53.970 4.844 4.236f 53.970 3.656 3.354
the sudden jump in control at t0 not only causes oscillations in the numerical solutions, butwould also require unrealistically high actuator frequency response.
Temperature contours for the uncontrolled flow and controlled flow, run (c), are plotted inFigure 5. Figure 3 shows that in all cases fluid is primarily blown into the domain such thatthe optimal control takes the form of film cooling. Since the fluid blown into the domainis at the wall temperature T = 1.5, this creates a small layer of fluid with almost constanttemperature T = 1.5 near Γc, see Figure 5 d,f, thereby reducing ∂T
∂n . The temperaturecontour plots for the controlled flows in runs (b) to (f) are very similar to those shown inFigure 5 d,f for run (a) and are not given here.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 29
TABLE 3Values of the regularization terms at the optimal control for different regularization
parameters.Run α1
2
∫ ‖gt‖22
α22
∫ ‖g‖22
α32
∫ ‖∇g‖22
α42
∫ ‖∆g‖22
a - 1.034 0.057 -b - 0.188 0.011 -c 0.054 0.537 0.031 -d 0.202 0.101 0.077 -e 0.053 0.527 0.028 0.002f 0.156 0.089 0.056 0.004
8.2. Optimal Control of Wall Shear StressIn this test case, we try to minimize a measure of the drag force on the lower wall through
wall-normal suction or blowing. Specifically, the observation part of the objective functionis given by (10). Since n = (0, −1)T , (10) reads
JObs(u(g)) =12
∫ tf
t0
∫Γ0
ω(x)τ212dx, (85)
where τ is defined by (1). The computational domain, the control boundary Γc, the ob-servation boundary Γ0, and the weighting function ω in (85) are defined as in Section 8.1.The lower wall is adiabatic, ∂T (x, t)/∂n = 0 on x = (x1, 0), while an inviscid charac-teristic based far-field boundary condition is imposed on the other boundaries. The spatialdiscretization is identical to the one used in Section 8.1. As in Section 8.1 we advance theflow equations for 600 time steps with step size ∆t = 0.025 to obtain the initial conditionsat t0 = 15. We control from t0 = 15 to tf = 35. In [t0, tf ] = [15, 35] we use 2000 timesteps with step size ∆t = 0.0075.
In all computations reported in this section,we regularize the time derivative of the controlα1 > 0. Without this regularization the control exhibits strong temporal oscillations. Sincethis behavior is qualitative comparable with that in Section 8.1, we omit the results forα1 = 0. The regularization parameters used in the four runs reported on in this section aredisplayed in Table 4.
TABLE 4
Regularization parameters used in the boundary control of wall shear stress.Run α1 α2 α3 α4
a 0.5 0.5 0.5 0b 0.5 0.05 0.5 0c 0.5 0.5 0.5 0.05d 0.5 0.05 0.5 0.05
Temporal and spatial variations of wall shear stress on the lower wall for the uncontrolledrun are depicted in Figure 6. Associated with each vortex is an extrema in local wall shearstress and at the center of the pair, x = 0, the shear stress is zero corresponding to astagnation point.
Plots (a)-(d) of Figure 7 show the wall shear stress on the lower wall for optimal controlruns (a)-(d). Clearly, all runs are successful in reducing the magnitude of shear stress over

30 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
the controlled region Γc, but (a) and (b) exhibit non-physical high-frequency oscillationsin the spatial direction. These oscillations in the observation term emanate from the highlyoscillatory controls of plots (a) and (b) of Figure 8. In runs (c) and (d) the control isrestricted to the smoother space of (13) which suppresses these oscillations very effectivelyand also enforces zero slope at points x = ±11.25 where the transition from the controlledboundary to the uncontrolled boundary occurs.
-2
0
2
-15-10
-50
510
15
X
15
20
25
30
35
T
τ12
FIG. 6. Distribution of wall shear stress, τ12, for the uncontrolled flow.
Tables 5 and 6 show values of the objective functional at the initial iterate (J0) and at thefinal control iterate (Jfinal), as well as the observation term and individual regularizationterms at the final control iterate.
TABLE 5Objective function values for wall shear stress control with different regularization
parameters.Run J0 Jfinal
12
∫ωτ2
12
a 222.879 15.054 10.169b 222.879 10.844 8.113c 222.879 11.537 8.839d 222.879 6.997 5.547
The qualitative effect of the optimal control on the vortex trajectories is shown by densitycontours for the uncontrolled flow and controlled flow, run (d), as plotted in Figure 9. Theprimary effect of the optimal control is to inject fluid at the wall that reduces the interactionbetween the vortices and the solid wall thereby reducing shear stress.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 31
-2
-1
0
1
2
-10
0
10
X
15
20
25
30
35
time
τwall
a) α1 = α2 = α3 = 0.5, α4 = 0.
-2
-1
0
1
2
-10
0
10
X
15
20
25
30
35
time
τwall
b) α1 = α3 = 0.5, α2 = 0.05, α4 = 0.
-2
-1
0
1
2
-10
0
10
X
15
20
25
30
35
time
τwall
c) α1 = α2 = α3 = 0.5, α4 = 0.05.
-2
-1
0
1
2
-10
0
10
X
15
20
25
30
35
time
τwall
d) α1 = α3 = 0.5, α2 = 0.05, α4 = 0.05.FIG. 7. Distribution of wall shear stress for optimal control runs (a)-(d).
TABLE 6Values of the regularization terms at the optimal control for wall shear stress
control with different regularization parameters.Run α1
2
∫ ‖gt‖22
α22
∫ ‖g‖22
α32
∫ ‖∇g‖22
α42
∫ ‖∆g‖22
a 0.115 4.169 0.601 –b 0.201 1.663 0.867 –c 0.213 2.257 0.206 0.023d 0.513 0.535 0.358 0.054

32 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
-0.1
0
0.1
0.2
0.3
0.4
-10
0
10X
15
20
25
30
35
time
Control, g
a) α1 = α2 = α3 = 0.5, α4 = 0
-0.1
0
0.1
0.2
0.3
0.4
-10
0
10X
15
20
25
30
35
time
Control, g
b) α1 = α3 = 0.5, α2 = 0.05, α4 = 0
-0.1
0
0.1
0.2
0.3
0.4
-10
0
10X
15
20
25
30
35
time
Control, g
c) α1 = α2 = α3 = 0.5, α4 = 0.05
-0.1
0
0.1
0.2
0.3
0.4
-10
0
10X
15
20
25
30
35
time
Control, g
d) α1 = α3 = 0.5, α2 = 0.05, α4 = 0.05FIG. 8. Optimal control distributions for shear stress control.

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 33
X
Y
-15 -10 -5 0 5 10 150
5
10
15
a) No control, t = t0.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
b) Optimal control, run (d), t = t0.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
c) No control, t = t0 + 12.5.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
d)Optimal control, run (d), t = t0 + 12.5.
X
Y
-15 -10 -5 0 5 10 150
5
10
15
e) No control, t = tf .
X
Y
-15 -10 -5 0 5 10 150
5
10
15
f) Optimal control, run (d), t = tf .FIG. 9. Density contours for the uncontrolled flow and drag control flow, run (d). There are 25 evenly
spaced contours from 1.9 to 2.7. Arrows on the bottom wall in plots (d) and (f) represent the boundary control.

34 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
8.3. Optimal Control of Terminal Kinetic EnergyThe objective functional for this test case is given by (6) with (8) and Ω0 = [−15, 15] ×
[0, 15] (the entire computational domain). We consider two control boundaries. In the firstcase the control boundary is the entire lower wall
Γc = x = (x1, 0) : x1 ∈ [−15, 15] . (86)
In the second case, we restricted the control boundary to be
Γc = x = (x1, 0) : x1 ∈ [−11.25, 11.25] , (87)
which is exactly the same control boundary used in the previous two cases documented inSections 8.1 and 8.2.
TABLE 7
Regularization parameters used in the boundary control of terminal kinetic energy.Run α1 α2 α3 α4
a 0 0.005 0.005 0b 0.5 0.005 0.005 0c 0.05 0.005 0.005 0d 0.05 0.005 0.005 0e 0.05 0.005 0.005 0.05
We performed five runs. The first three runs, runs (a)–(c) use the control boundary (86)and the coefficients αj documented in Table 7. Detailed results for this case have beenreported in [11]. We only show the computed controls for the runs (a)–(c) in Figure 10. Inthis case no second order spatial regularization of the control was needed; judging from thenumerical solution, the control space (12) and corresponding regularization term (14) wassufficient. Relaxing the smoothness requirements on the control, however, leads to strongspatial or temporal oscillations.
The last two runs, runs (d), (e), use the control boundary (87) and the coefficients αj
documented in Table 7. In this case spatial oscillation developed when α4 = 0. This canbe seen when we compare Figures 10 b) and d). Figure 10 b) shows the computed controlwhen control boundary (86) is used and Figure 10 d) shows the computed control whencontrol boundary (87) is used. We see that spatial oscillation developed. These spatialoscillations can be suppressed if the second spatial derivative of the control is penalized,i.e., if α4 > 0. See Figure 10 e). The computed controls shown in Figures 10 b) and e) arequalitatively very similar. Table 8 shows that similar reduction in terminal kinetic energycan be achieved by all five controls.
These computations indicate that the control space (13) and corresponding regularizationterm (15) is needed because the control region is only a subset of the boundary. Sharp spatialderivatives in the boundary conditions at ∂Γc seem to lead to oscilations in the computedresults. Likely, this is connected to the fact that we use high order finite differences in ourdiscretization. One might have conjectured that in the cases reported on the Sections 8.1,8.2 the control space (13) and corresponding regularization term (15) was needed becausethe observation terms (9) and (10) are taken on the boundary and involve derivatives ofthe flow solution u. While this might be one reason to require smoother controls, the

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 35
-0.4
-0.2
0
-10
0
10X
10
20
30
40
time
Control g
a) α1 = 0, α2 = α3 = 0.005, α4 = 0.
-0.4
-0.2
0
-10
0
10X
10
20
30
40
time
Control g
b) α1 = 0.5, α2 = α3 = 0.005, α4 = 0.
-0.4
-0.2
0
-10
0
10X
10
20
30
40
time
Control g
c) α1 = 0.05, α2 = α3 = 0.005, α4 = 0.
-0.4
-0.2
0
-10
0
10X
10
20
30
40
time
Control g
d) α1 = 0.05, α2 = α3 = 0.005, α4 = 0.
-0.4
-0.2
0
-10
0
10X
10
20
30
40
time
Control g
e) α1 = 0.05, α2 = α3 = 0.005,α4 = 0.05.
FIG. 10. Optimal wall-normal velocity distributions for TKE control.
computations with the objective function (8) performed in this section indicate that other

36 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
TABLE 8
Objective function values for different regularization parameters.Run J0 Jfinal TKEfinal
a 12.43 0.24 0.20b 12.43 0.48 0.42c 12.43 0.37 0.33d 12.43 0.44 0.39e 12.43 0.44 0.39
factors, such as the discretization enter the choice of the control space and correspondingregularization term.
9. CONCLUSIONS
We have studied the mathematical formulation of optimal boundary control for flows gov-erned by the two-dimensional unsteady compressible Navier–Stokes equations includingits impact on the numerical solution of these problems and we have presented numericalresults illustrating the impact of problem formulation on three test problems. We haveprovided a careful presentation of the gradient computation using the adjoint equationapproach in an abstract setting, for the semi-discretized optimal control problem, and thefully discretized optimal control problem. The gradient computation is strongly influencedby the selection of the control space, which is also related to the choice of the regularizationterm in the objective function. In many numerical approaches for the solution of optimalcontrol problems governed by partial differential equations this dependence of the gradientcomputation on the choice of the control space is ignored. Ignoring this dependence oftenleads to computed controls that exhibit grid dependent oscillations that can degrade per-formance of the optimization algorithm. In our problems, only controls that have squareintegrable time and spatial derivatives are admissible. As a consequence, the gradient com-putation in the semi-discrete problem requires the solution of a very large-scale two-pointboundary value problem. If higher order spatial and time discretizations are used, thistwo-point boundary value is cumbersome and expensive to solve. As a remedy we haveintroduced an equivalent reformulation of the problem that avoids this task. This problemreformulation is also relevant for other applications. We have illustrated the impact of theproblem formulation on the numerical solution using three test cases involving the controlof wall-vortex interaction. All tests have shown that enforcing spatial and temporal regular-ity in the admissible controls is important to suppress artificial grid dependent oscillationsin the computed controls. We have also observed a better performance of the nonlinearconjugate gradient method if the control space is chosen appropriately and integrated intothe numerical computations as described in this paper.
In this paper we have described gradient computation using the adjoint equation approachfor the semi-discretized optimal control problem and the fully discretized optimal controlproblem. This avoids the formulation of the adjoint differential equations and their boundaryconditions. A formal derivation of the adjoint differential equations and their boundaryconditions is given in [10]. A more rigorous mathematical foundation of adjoint andgradient computations on the differential equation level is part of our future research.A comparison of discretizations of the adjoint differential equations and correspondinggradient expressions with the discrete adjoints and gradients computed as shown in this

OPTIMAL CONTROL OF UNSTEADY COMPRESSIBLE VISCOUS FLOWS 37
paper is under investigation. This work is a first step towards the on-blade control ofaeroacoustic noise generated by blade-vortex interaction. Applications of the approachdescribed in this paper to objective functions and geometries relevant for the control ofaeroacoustic noise are under way.
ACKNOWLEDGMENTThe work of S.S. Collis, K. Ghayour and M. Heinkenschloss was supported by Texas ATP grant 003604–
0001, 1999, and in part by the Los Alamos National Laboratory Computer Science Institute (LACSI) throughLANL contract number 03891-99-23, as part of the prime contract (W-7405-ENG-36) between the Department ofEnergy and the Regents of the University of California. M. Ulbrich and S. Ulbrich were supported by DFG grantsUL157/3-1 and UL158/2-1, respectively, and by CRPC grant CCR-9120008. Computations were performed onan SGI Origin 2000 which was purchased with the aid of NSF SCREMS grant 98–72009.
REFERENCES
1. Argonne National Laboratory Computational Differentiation Web Pages. http://www.mcs.anl.gov/autodiff/.
2. M. Berggren. Numerical solution of a flow-control problem: Vorticity reduction by dynamic boundary action.SIAM J. Scientific Computing, 19:829–860, 1998.
3. T. R. Bewley, P. Moin, and R. Temam. DNS–based predictive control of turbulence: an optimal benchmarkfor feedback algorithms, to appear.
4. G. Biros and O. Ghattas. Parallel Newton–Krylov methods for PDE–constrained optimization. In Proceedingsof Supercomputing ’99, Portland, Oregon, November 13–19, 1999, 1999. Electronically available fromhttp://www.cs.cmu.edu/∼oghattas/.
5. H. G. Bock. Randwertprobleme zur Parameteridentifizierung in Systemen nichtlinearer Differentialgleichun-gen. Preprint Nr. 442, Universitat Heidelberg, Institut fur Angewandte Mathematik, SFB 123, D–6900Heidelberg, Germany, 1988.
6. J. Borggaard and J. Burns. A PDE sensitivity equation method for optimal aerodynamic design. Journal ofComputational Physics, pages 366–384, 1997.
7. M. H. Carpenter, D. Gottlieb, and S. Abarbanel. Stable and accurate boundary treatments for compact,high-order finite difference schemes. Appl. Num. Math., 12(1–3):55–87, 1993.
8. E. M. Cliff, M. Heinkenschloss, and A. Shenoy. Airfoil design by an all–at–once method. InternationalJournal for Computational Fluid Mechanics, 11:3–25, 1998.
9. S. S. Collis and Y. Chang. On the use of LES with a dynamic subgrid scale model for the optimal controlof wall bounded turbulence. In D. Knight and L. Sakell, editors, Recent Advances in DNS and LES, pages99–110. Kluwer Academic Publishers, 1999.
10. S. S. Collis, K. Ghayour, M. Heinkenschloss, M. Ulbrich, and S. Ulbrich. Numerical solution of optimalcontrol problems governed by the compressible Navier–Stokes equations. In Proceedings of the InternationalConference on Optimal Control of Complex Structures. Birkhauser Verlag, 2001.
11. S. S. Collis, K. Ghayour, M. Heinkenschloss, M. Ulbrich, and S. Ulbrich. Towards adjoint–based methodsfor aeroacoustic control. In 39th Aerospace Science Meeting & Exhibit, January 8–11, 2001, Reno, Nevada,AIAA Paper 2001–0821, 2001. Electronically available from http://www.caam.rice.edu/∼heinken.
12. S. S. Collis and S. K. Lele. A computational investigation of receptivity in high-speed flow near a sweptleading-edge. Technical Report TF-71, Flow Physics and Computation Division, Department of MechanicalEngineering, Stanford University, 1997.
13. T. Colonius, S. K. Lele, and P. Moin. The free compressible viscous vortex. Journal of Fluid Mechanics,230:45–73, 1991.
14. R. Dautray and J. L. Lions. Mathematical Analysis and Numerical Methods for Science and Technology,Volume 2: Functional and Variational Methods. Springer Verlag, Berlin, Heidelberg, New York, 1988.
15. R. Dautray and J. L. Lions. Mathematical Analysis and Numerical Methods for Science and Technology,Volume 5: Evolution Problems I. Springer Verlag, Berlin, Heidelberg, New York, 1992.
16. J. E. Dennis, Jr. and R. B. Schnabel. Numerical Methods for Nonlinear Equations and UnconstrainedOptimization. SIAM, Philadelphia, 1996.
17. A. V. Fursikov. Optimal Control of Distributed Systems. Theory and Applications. Translation of MathematicalMonographs, Vol. 187. American Mathematical Society, Providence, Rhode Island, 2000.

38 S.S. COLLIS, K. GHAYOUR, M. HEINKENSCHLOSS, M. ULBRICH, AND S. ULBRICH
18. A. V. Fursikov, M. D. Gunzburger, and L. S. Hou. Boundary value problems and optimal boundary control forthe Navier–Stokes systems: The two–dimensional case. SIAM J. Control Optimization, 36:852–894, 1998.
19. O. Ghattas and J.-H. Bark. Optimal control of two– and three–dimensional Navier–Stokes flow. Journal ofComputational Physics, pages 231–244, 1997.
20. R. Giering and T. Kaminski. Recipes for adjoint code construction. ACM Transactions on MathematicalSoftware, 24:437–474, 1998.
21. A. Griewank. Evaluating Derivatives. Principles and Techniques of Algorithmic Differentiation. Frontiers inApplied Mathematics. SIAM, Philadelphia, 2000.
22. M. D. Gunzburger, L. S. Hou, and T. P. Svobotny. Optimal control and optimization of viscous, incompressibleflows. In M. D. Gunzburger and R. A. Nicolaides, editors, Incompressible Computational Fluid Dynamics,pages 109–150, Cambridge, New York, 1993. Cambridge University Press.
23. M. D. Gunzburger and S. Manservisi. The velocity tracking problem for Navier–Stokes flows with boundarycontrol. SIAM J. Control Optimization, 39:594–634, 2000.
24. W. W. Hager. Rates of convergence for discrete approximations to unconstrained control problems. SIAM J.Numer. Analysis, 13:449–472, 1976.
25. W. W. Hager. Runge-Kutta methods in optimal control and the transformed adjoint system. NumerischeMathematik, 87:247–282, 2000.
26. H. He, O. Ghattas, and J. F. Antaki. Computational strategies for shape optimization of time–dependentNavier–Stokes flows. Technical Report CMU-CML–97–102, Engineering Design Research Center, CarnegieMellon University, 1997. Electronically available from http://www.cs.cmu.edu/∼oghattas/.
27. J.-W. He, R. Glowinski, R. Metcalfe, A. Nordlander, and J. Periaux. Active control and drag optimization forflow past a circular cylinder. I. oscillatory cylinder rotation. Journal of Computational Physics, 163:83–117,2000.
28. M. Heinkenschloss and L. N. Vicente. An interface between optimization and application for the numericalsolution of optimal control problems. ACM Transactions on Mathematical Software, 25:157–190, 1999.
29. D. Hoff. Discontinuous solutions of the Navier–Stokes equations for multidimensional flows of heat–conducting fluids. Arch. Rational Mech. Anal., 139:303–354, 1997.
30. A. Jameson, L. Martinelli, and N. A. Pierce. Optimum aerodynamic design using the Navier-Stokes equations.Theoretical and Computational Fluid Dynamics, 10:213–237, 1998.
31. A. Jameson and J. Reuther. Control theory based airfoil design using the Euler equations. In AIAA Paper94-4272, 1994.
32. W. H. Jou, W. P. Huffman, D. P. Young, R. G. Melvin, M. B. Bieterman, C. L. Hilems, and F. T. Johnson.Practical considerations in aerodynamic design optimization. In Proceedings of the 12th AIAA ComputationalFluid Dynamics Conference, pages 950–960, San Diego, CA, June 19–22 1995. AIAA. AIAA Paper 95-1730.
33. S. K. Lele. Compact finite difference schemes with spectral-like resolution. J. Comp. Phys., 103(1):16–42,1992.
34. Z. Li, M. Navon, M. Y. Hussaini, and F. X. Le Dimet. Optimal control of the unsteady Navier–Stokesequations. Computaters & Fluids, 2001.
35. P. L. Lions. Mathematical Topics in Fluid Mechanics. Volume 2, Compressible Models. Oxford Lecture Seriesin Mathematics and its Applications, Vol. 10. Claredon Press, Oxford, 1998.
36. A. Matsumura and T. Nishida. The initial value problem for the equations of motion of viscous and heat-conductive gases. J. Math. Kyoto Univ., 20:67–104, 1980.
37. A. Matsumura and T. Nishida. Initial-boundary value problems for the equations of motion of compressibleviscous and heat-conductive fluids. Comm. Math. Phys., 89:445–464, 1983.
38. J. Nocedal and S. J. Wright. Numerical Optimization. Springer Verlag, Berlin, Heidelberg, New York, 1999.
39. M. Renardy and R. C. Rogers. An Introduction to Partial Differential Equations. Texts in Applied Mathematics,Vol. 13. Springer Verlag, Berlin, Heidelberg, New-York, 1993.
40. J. M. Restrepo, G. K. Leaf, and A. Griewank. Circumventing storage limitations in variational data assimilationstudies. SIAM J. Scientific Computing, 19:1586–1605, 1998.
41. Bambang Soemarwoto. The variational method for aerodynamic optimization using the Navier–Stokes equa-tions. Technical Report 97–71, ICASE, NASA Langley Research Center, Hampton VA 23681–0001, 1997.
42. C. K. W. Tam and J. C. Webb. Dispersion-relation-preserving finite difference schemes for computationalacoustics. J. Comp. Phys., 107:262–281, 1993.
43. C. K. W. Tam, J. C. Webb, and Dong Zhong. A study of the short wave components in computational acoustics.J. Comp. Acou., 1(1):1–30, 1993.
44. A. Valli. Mathematical results for compressible flows. In J. F. Rodriguez and A. Sequeira, editors, MathematicalTopics in Fluid Mechanics, Pitman Research Notes Mathematics, Vol. 274, pages 193–229, Essex, 1992.Longman Scientific and Technical.


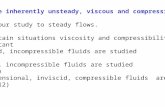






![Viscous and/or Heat Conducting Compressible Fluidsdpnm.postech.ac.kr/papers/MM-book/SERRE03.pdf · Viscous and/or Heat Conducting Compressible Fluids ... [93], or Shapiro [94]. A](https://static.fdocuments.in/doc/165x107/5b83ed847f8b9a315b8e3077/viscous-andor-heat-conducting-compressible-viscous-andor-heat-conducting-compressible.jpg)








