
OPODIS 05 Reconfigurable Distributed Storage for Dynamic Networks Gregory Chockler, Seth Gilbert,...
33
OPODIS 05 Reconfigurable Distributed Storage for Dynamic Networks Gregory Chockler, Seth Gilbert, Vincent Gramoli, Peter M Musial, Alexander A Shvartsman
-
date post
19-Dec-2015 -
Category
Documents
-
view
217 -
download
0
Transcript of OPODIS 05 Reconfigurable Distributed Storage for Dynamic Networks Gregory Chockler, Seth Gilbert,...

OPODIS 05
Reconfigurable Distributed Storage for Dynamic
NetworksGregory Chockler, Seth Gilbert,
Vincent Gramoli, Peter M Musial, Alexander A Shvartsman

OPODIS 05
Goals
Reconfigurable Distributed Storage (RDS)• Atomic consistency (read/write)• Fault Tolerance
…in Dynamic and Asynchronous Systems.

OPODIS 05
Distributed Storage

OPODIS 05
Distributed Storage
Data is replicated at several network locations

OPODIS 05
Distributed Storage
Write
Read
Operation policy

OPODIS 05
…in Dynamic Networks

OPODIS 05
Distributed Storage in Dynamic Networks

OPODIS 05
Distributed Storage in Dynamic Networks
leaving nodesjoining nodes

OPODIS 05
Distributed Storage in Dynamic Networks

OPODIS 05
Distributed Storage in Dynamic Networks
…requires a reconfiguration process.

OPODIS 05
Distributed Storage in Dynamic Networks
…by achieving agreement.

OPODIS 05
Model
• Distributed– Connected set of processors– Each processor has a unique id i I– MWMR, any processor is a potential client
• Asynchronous– Asynchronous processors – Point-to-point asynchronous unreliable
channels• Dynamic
– Processors join and leave the system– Processors may crash

OPODIS 05
What is a configuration?
• Configuration <members, read-quorums, write-quorums>– members is a set of processors,– read-quorums, write-quorums two sets of quorums RQ read-quorums, WQ write-quorums
• RQ members • WQ members • RQ WQ (only for a given configuration)
• Every client maintains a set of configurations, initially containing the default one.

OPODIS 05
Single Object Operations Overview
After [ABD95]• tag = <c,i> N I, val a possible value
• val = Read()i
(<c,j>,val)=query();[prop(<c,j>,val);]
• Write(val)i (<c’,j>,val’)=query();prop(<c’++,i>,val);
1.(tag,val) query(NULL): gathers (tag,val) pairs of all processors of a RQ and returns the one with the largest tag.
2.NULL prop(tag,val): updates (tag,val) pairs at all processors of a WQ.
Write tag
Read tag

OPODIS 05
Reconfiguration Design Goals
• Sound– Totally ordered configurations
• Flexible – No dependences between configurations
• Non-intrusive– Makes possible concurrent read/write
operations
• Fast– Strengthening fault tolerance

OPODIS 05
Decoupling Reconfiguration
• Reconfiguration = Replacing Configurations– {I} Installing a new configuration– {R} Removing old configuration(s)
• If {R} ≺ {I} Operations are delayed
• If {I} ≺ {R} Stronger configuration viability assumption is required

OPODIS 05
Solution
({R} ≺ {I}) ({I} ≺ {R})
{I} // {R}
Tighter coupling between removal and installation

OPODIS 05
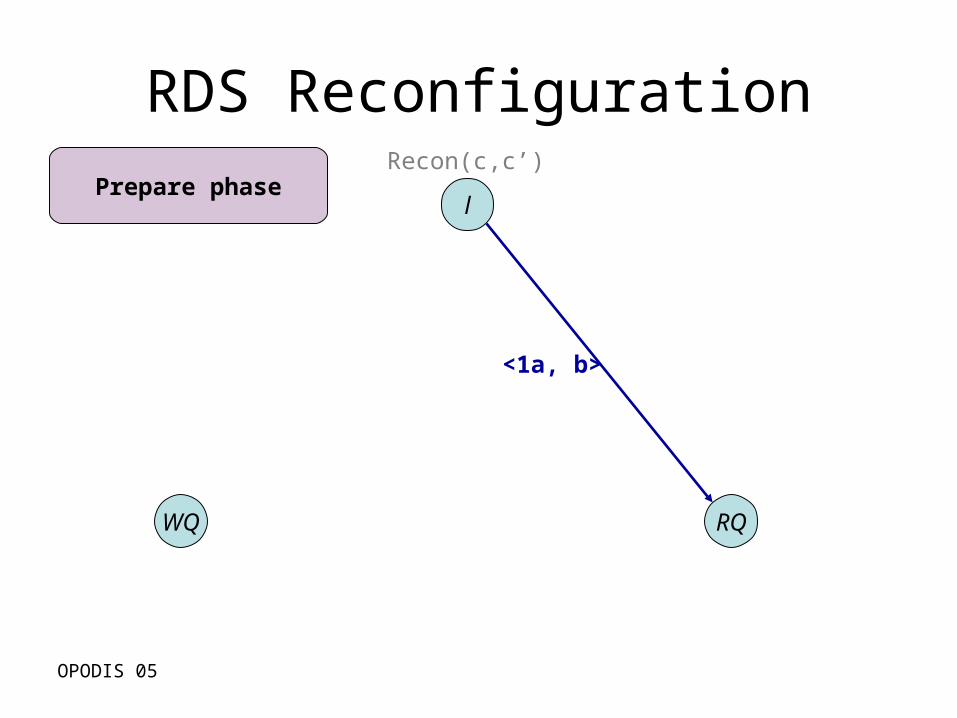
RDS Reconfiguration• Reconfiguration is based on Paxos (3 phases leader-based consensus alorithm)• l is the leader• c is the current configuration• configs is the set of active configurations• A ballot has a unique identifier b and a value v,
which is a configuration• Paxos phases:
– Prepare: l creates a new ballot and chooses/gets the value to propose.
– Propose: l proposes <b,v> and gathers votes from a majority.
– Propagate: l propagates decision

OPODIS 05
RDS Reconfiguration
l
RQWQ
Recon(c,c’)

OPODIS 05
RDS Reconfiguration
l
RQWQ
Prepare phaseRecon(c,c’) •Creates a new larger ballot b
OPODIS 05
RDS Reconfiguration
l
RQWQ
<1a, b>
Prepare phaseRecon(c,c’)

OPODIS 05
RDS Reconfiguration
l
RQWQ
<1a, b>
<1b, b, configs, <b’’, c’’>>
•Updates its ballot’s value v with the one received •Updates its configs set
Prepare phaseRecon(c,c’)

OPODIS 05
RDS Reconfiguration
l
RQWQ
<1a, b>
<1b, b, configs, <b’’, c’’>>
<2a, b, c, v>
Propose phaseRecon(c,c’)

OPODIS 05
RDS Reconfiguration
l
RQWQ
<1a, b>
<1b, b, configs, <b’’, c’’>>
<2a, b, c, v>
<2b, b, c, v, tag, val>
Recon(c,c’)
<2b, b, c, v, tag, val>
Propose phase
•Updates their tag and val•Adds v to their configs set

OPODIS 05
RDS Reconfiguration
l
RQWQ
<1a, b>
<1b, b, configs, <b’’, c’’>>
<2a, b, c, v>
<2b, b, c, v, tag, val><3a, c, v, tag, val>
<3a, c, v, tag, val>
Recon(c,c’)
<2b, b, c, v, tag, val>
Propagation phase
•Update their tag and val•Remove configuration c from their configs set
<3a, c, v, tag, val>

OPODIS 05
Proving Atomicity
• Ordering configurations
• Ordering operations
Theorem 1: The set of installed configurations in the system is totally ordered.
Theorem 2: If operation 1 precedes operation 2 then 1’s tag is not larger than 2’s tag.

OPODIS 05
Additional Assumptions
• Eventual stabilization with– Unique leader l – Message delay bound d (unkown to the algorithm) – Gossip with frequency d– Restricted reconfiguration rate– Some quorums remain alive in active configurations
ts
ts: System stabilization time
Let’s tr be the Request time
2d
tl: Algorithm stabilization time
tl

OPODIS 05
Reconfiguration Latency
Worst case scenario: Last reconfiguration was done by a different leader.
Prepare
max(tl, tr)
Propose Propagate
2d 2d d
te
te: end timeReconfiguration is complete
5d

OPODIS 05
Reconfiguration Latency
Other cases: The leader made the previous reconfiguration.
max(tl, tr)
Propose Propagate
2d d
te
te: end timeReconfiguration is complete
3d

OPODIS 05
Operation Latency
Phase latency: • 2d is sufficient for the phase round trip.• In some cases (pending reconfiguration), the phase might be delayed twice.
1st round trip
Operation latency: • Operations are bounded by 8d.• In some cases, the propagation phase of the read operation can be ignored, leading to a possible bound of 2d.
2nd round trip
2d 2d
New configuration discovered

OPODIS 05
Experimental Results
• IOA to Java code following set of rules.
• Implementation of Attiya, Bar-Noy, and Dolev algorithm « ABD » (w/o Reconfiguration) and RDS which shares parts of the ABD code.
• Using majority-based configurations.
• Measuring operation latency1. While varying configuration size2. While varying algorithm instances

OPODIS 05
Experimental Results
• Operation latency of RDS is competitive with ABD, confirming the theory.
• Reconfiguration messages contain operation information which might accelerate operations in RDS.

OPODIS 05
Conclusion
• RDS, Reconfigurable Distributed Storage.• With sound, flexible, non-intrusive and
fast reconfiguration.• It solves two problems in one:
Configuration replacement and Consensus.
• Reconfiguration is inexpensive (time).• Fault tolerance is strenghtened.• RAMBO can become more agressive: it is
exactly what we did here!
















![Transactional Contention Management as a Non-Clairvoyant Scheduling Problem Alessia Milani [Attiya et al. PODC 06] [Attiya and Milani OPODIS 09]](https://static.fdocuments.in/doc/165x107/56649ce25503460f949ada56/transactional-contention-management-as-a-non-clairvoyant-scheduling-problem.jpg)
