Online Control of Spray Cooling Using...
13
ANNUAL REPORT 2008 UIUC, August 6, 2008 Bryan Petrus BG Thomas Joseph Bentsman Department of Mechanical Science and Engineering University of Illinois at Urbana-Champaign Online Control of Spray Cooling Using Cononline University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 2 Acknowledgements • Continuous Casting Consortium Members • Nucor Decatur – Terri Morris, Rob Oldroyd, Kris Sledge, Ron O’Malley, Alan Hable • National Science Foundation – GOALI DMI 05-00453 (Online) • Other CCC grad students – Huan Li, Sami Vapalahti, Xiaoxu Zhou
Transcript of Online Control of Spray Cooling Using...

ANNUAL REPORT 2008UIUC, August 6, 2008
Bryan PetrusBG Thomas
Joseph Bentsman
Department of Mechanical Science and Engineering
University of Illinois at Urbana-Champaign
Online Control of Spray Cooling Using
Cononline
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 2
Acknowledgements
• Continuous Casting Consortium Members• Nucor Decatur
– Terri Morris, Rob Oldroyd, Kris Sledge, Ron O’Malley, Alan Hable
• National Science Foundation– GOALI DMI 05-00453 (Online)
• Other CCC grad students– Huan Li, Sami Vapalahti, Xiaoxu Zhou

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 3
Overview
• Cononline Overview– Consensor: “software sensor”
– Concontroller: PI controller bank
– Monitor
• Real-time simulations– Startup
– Tailout
– Setpoint change
• Future research
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 4
Project Motivation: Approaches to Cooling Spray Control
1) Manual control:– Operator sets of water flow rates– Difficult at high casting speeds when response times must be
short
2) Casting-speed-based control:– Set water flow rates according to casting speed– Results in non-optimal cooling during transient conditions
3) Conventional feedback control:– Limited measurement opportunities– Pyrometers etc. can be unreliable in spray zones
4) Software-sensor-based control:– Create “software sensor,” an accurate, real-time computational
model to base control on

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 5
Overview
Software Sensor
(CON1D subroutine)
CasterController
Surface temperature setpoint
Parameters (updatedevery heat
from level 2)
Parameters (updated at calibration through
input file)
e.g. caster and mold geometry
Water flow rate command
Measurements (updated every second),
e.g. mold heat removal rate, casting speed
e.g. steel composition
Slab temperature, shell thickness
Monitor
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 6
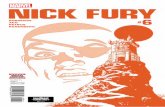
Computer Architecture
Controller Computer
(Slackware Linux)
CommServer
shared memoryCommServer
ConcontrollerAXServer
Model Computer
(CENT OS Linux)
shared memory CommClient
Consensor
Monitor Computer
(Windows)Monitor
TCP/IP connection
Shared memory connection
Level 2CommClient
Current control logic

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 7
Consensor Overview: CON1D
• Fundamentally based transient finite-difference model:
• CON1D predicts:– shell thickness– temperature distribution– heat flux profiles
• Suitable for real-time model– Can simulate entire caster
in < 1 second– “Restart mode”: Can stop
simulation at arbitrary point, continue later
Center-line view of caster
I shaped domain
(along centerline of slab)22
*2 steel
steel steel steel
kT T TCp k
t x T x
∂ ⎛ ⎞= + ⎜ ⎟∂ ⎝ ⎠
∂∂ ∂ρ∂ ∂ ∂
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 8
Consensor Overview
• Multiple “slices”– Each second, simulate
each slice for 1 second– 200 slice simulation for 1
second each takes ~ same time as 1 slice through entire caster: < 0.5 seconds
• Consensor– stores and manages 200
CON1D slices– Interpolates between
slices to estimate full shell & temperature profile
Center-line view of caster
I shaped domain: “slice”

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 9
Concontroller Overview:Spray Zones
Zone 1
Zone 2
Zone 6
(Inner/Outer)
Zone 4
Zone 7
(Inner/Outer)
Zone 5
(Inner/Outer)
Zone 3
4 x 1 + 3 x 2 = 10 controllers
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 10
Concontroller Overview
• Zone-based PI control: 10 individual PI controllers, one for each spray zone
• Controller Algorithm: At each second of time:
1. Obtain surface temperature profile from CONONLINE.
2. For all 10 zones: i. Compute the zone-based surface temperature average Tavg for
current zone. And form the tracking error Terr = Tavg – Tsp
ii. Use Terr to compute the water flow rate command = Nominal_flow + Δflow(t),
3. Send all water flow rate commands to Consensor, Caster, and Monitor
0( ) ( ) ( )
t
p err i errflow t k T t k T s dsΔ = + ∫

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 11
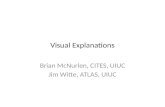
Setpoint Methodologies
1. Speed-based spray flow setpoints – current Nucor spray practices
2. Temperature setpoints(zone-averages) based on steady states for flows in (1)
3. Vary (2) based on casting conditions• Casting speed• Mold exit temperature
(mold heat flux, superheat)
4. Operator-chosen temperature setpoints
0 5000 10000 15000800
850
900
950
1000
1050
1100
1150
1200
Distance from meniscus(mm)T
empe
ratu
re (
o C )
Three types of setpoints
Real
FilteredZone-based averaged
Pattern 1 Pattern 2 Pattern 3 Pattern 4
(i/min) (in/min) (in/min) (in/min)
(gal/min) (gal/min) (gal/min) (gal/min)
Zone 1, Speed 1 0 0 0 0
Zone 1, Flow Rate 1 0 0 0 0
Zone 1, Speed 2 15.7 15.7 15.7 15.7
Zone 1, Flow Rate 2 26 24 26 23
Zone 1, Speed 3 31.5 31.5 31.5 31.5
Zone 1, Flow Rate 3 26 24 26 23
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 12
Monitor Overview:Profile Screen

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 13
Monitor Overview
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 14
Monitor Overview:Parameter Screen

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 15
Real-time Simulations
• Caster data recorded at Nucor Decatur– thanks to Terri Morris, Rob Oldroyd, and Alan Hable
• Simulations run in real-time at UIUC– HP DL380 G5 servers, Intel Xeon processors
• Situations:1. Casting startup
2. Slab tailout
3. Change in temperature setpoints
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 16
Startup
• Simulating recorded caster data at Nucor Decatur
• 0.03 % Carbon steel
• Played at 3x speed
Cast Length
01000200030004000
5000600070008000
0 50 100 150 200 250
Time (s)
Cas
t L
eng
th (
mm
)
Cast Speed
0
0.5
1
1.5
2
2.5
3
0 50 100 150 200 250
Time (s)
Ca
st
Sp
ee
d (
m/m
in)
Mold Heat Removal (BF1)
0
0.5
1
1.5
2
2.5
0 50 100 150 200 250
Time (s)
Hea
t F
lux
(MW
/m^2
)

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 17
Startup
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 18
Startup – With PI Control

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 19
Tailout
• Simulating recorded caster data at Nucor Decatur
• 0.05 % Carbon steel
• Played at 3x speed
Meniscus to Strand Tail Distance
02000400060008000
10000120001400016000
0 100 200 300 400
Time (s)
Dis
tan
ce (
mm
)
Cast Speed
0
1
2
3
4
5
6
0 100 200 300 400
Time (s)
Ca
st
Sp
ee
d (
m/m
in)
Mold Heat Removal (BF1)
0
0.5
1
1.5
2
2.5
0 100 200 300 400
Time (s)
Hea
t F
lux
(MW
/m^2
)
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 20
Tailout

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 21
Tailout – With PI Control
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 22
Temperature Setpoint Change
• Casting conditions based on initial state in previous tailout simulation– 0.05 % Carbon steel– 3.0 m/min casting speed– 26 °C superheat
• Setpoint in 4th zone changed by operator– Initial value: 1071 °C (1960 °F)– Changed to: 1000 °C (1832 °F)
• Played at 3x speed

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 23
PI Control – Operator Changes Setpoint
University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 24
Advanced Control Development
• Anti-windup– Actuator saturation can lead
to windup of integral controller
– Simple anti-windup scheme added
• Optimal control law development– In progress– Control laws have been
designed for 1-D heat equation with spatially varying parameters
• Metallurgical length (ML) control– In progress
Saturation uactualuideal
Σ
Anti-windup
00.2
0.40.6
0.81
0
0.5
1
1.5
2
-2
-1.5
-1
-0.5
0
0.5
timex
e(x,
t) =
v -
u
Control Law PerformanceReference
Model
Feedback law Plant
Parameter adaptation algorithm
Reference input r
v, vx, vxx, (vt)
Control input f
u
u, (ut)

University of Illinois at Urbana-Champaign • Metals Processing Simulation Lab • Bryan Petrus, BG Thomas, & Joseph Bentsman 25
Future Research
• Software sensor– Make model robust to casting conditions and data errors
– Improve accuracy of model by adding physical behavior• More accurate heat transfer coefficients (Sami, Xiaoxu’s
research)
• Possible hysteresis effects during spray changes
• Intelligent metallurgical length control– Temperature tracking does not guarantee shell profile
– Need to balance temperature tracking versus metallurgical length control
• System “envelope” to describe safe temperature setpoints?
• Moving boundary control, optimal, or predictive controller design?