
Online activity detection in a multiuser environment using the matrix CUSUM algorithm
17
IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002 477 Online Activity Detection in a Multiuser Environment Using the Matrix CUSUM Algorithm Taragay Oskiper, Student Member, IEEE, and H. Vincent Poor, Fellow, IEEE Abstract—Early detection of the entrance of a new user into a multiuser communication channel is considered. The matrix CUSUM (cumulative-sum) test, a multialternative quickest change detection method, is introduced and then applied to this problem. The general behavior of this algorithm is described in analytical results and simulations. Index Terms—Code division multiple access (CDMA), multial- ternative change detection, online change detection, quickest de- tection, user activity detection. I. INTRODUCTION I N a direct-sequence/code-division multiple-access (DS-CDMA) wireless communication environment, mul- tiuser detectors can give superior performance by exploiting knowledge of the signaling multiplex. However, changes in the user population due to the random access and bursty nature of such channels can result in degradation of a multiuser receiver’s performance if it does not react quickly to such changes and adapt itself to incorporate the new conditions into the detector structure. The issue of learning, in a nonsequential manner, and integrating the knowledge of a new transmitting user into a multiuser receiver is studied in [8]. Also in [5], the identification of a new user in a CDMA system by detecting the entrance of a new user and its parameters is studied using fixed sample sizes and again in a nonsequential manner. Here, we consider the online detection/isolation of a change in the received signal structure in a CDMA system, focusing on the entrance of a new user into the system. In particular, we consider the situation in which a new user enters the system at a random instant, choosing a spreading code from a finite set known to the receiver. The entry time and the type of the user (i.e., the spreading code chosen from the available set) are unknown. Furthermore, the bit stream transmitted by the new user is random, and hence unknown to the receiver. Our purpose is to detect (decide whether a change has occurred) and isolate (decide on the type of the change) as quickly as possible when such an event occurs. Manuscript received October 1, 2000; revised September 15, 2001. This work was supported by the U.S. Office of Naval Research under Grant N00014-00-1- 0141. The material in this paper was presented in part at the IEEE Sixth Inter- national Symposium on Spread Spectrum Techniques and Applications, Parsip- pany, NJ, September 6–8, 2000 and IEEE International Symposium on Infor- mation Theory, Washington, DC, June 24–29, 2001. The authors are with the Department of Electrical Engineering, Princeton University, Princeton, NJ 08544 USA (e-mail: [email protected]; [email protected]). Communicated by U. Madhow, Associate Editor for Detection and Estima- tion. Publisher Item Identifier S 0018-9448(02)00313-9. This paper is organized as follows. In Section II, we define the signal model and put the problem of interest into the multi- alternative change detection framework. In Section III, we de- scribe, based on the work of Nikiforov [10], the basic criteria involved in the design of multialternative change detection al- gorithms. Then we describe briefly Page’s CUSUM test and Nikiforov’s generalized change detection algorithm, which is a natural extension of Page’s test for the multialternative case. In Section VI, we introduce the matrix CUSUM method by modi- fying Nikiforov’s algorithm and putting it into a recursive form which makes it possible to use in an online fashion. We also show that the matrix CUSUM method preserves the asymptotic optimality of Nikiforov’s algorithm. Then, in Section VII, we apply this method to the problem of user activity detection in a CDMA system. We also introduce two suboptimal approaches that require less knowledge about the signal model than the op- timal likelihood ratio based method. Finally, we provide some simulation results and conclusions. II. SIGNAL MODEL Consider the following model [12] for the received signal in a synchronous DS-CDMA channel with active users. After chip-matched filtering and chip rate sampling, the received signal vector can be modeled as (1) where is the symbol index and , , and denote, re- spectively, the received amplitude, the bit (we assume binary antipodal symbols) at the th signaling interval, and the normalized unit energy signature waveform vector (i.e., the spreading code) of user . It is assumed that is a collec- tion of independent equiprobable random variables, that is a white Gaussian noise vector sequence with mean and covariance ,( is the identity matrix), and that is independent of . For simplicity, we have assumed a baseband model, although this can easily be gener- alized to the complex case. We can rewrite the received vector as (2) where is the diagonal matrix of user am- plitudes, i.e., and It is assumed that is a linearly independent set of vec- tors and that . 0018–9448/02$17.00 © 2002 IEEE
Transcript of Online activity detection in a multiuser environment using the matrix CUSUM algorithm
IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002 477
Online Activity Detection in a Multiuser EnvironmentUsing the Matrix CUSUM Algorithm
Taragay Oskiper, Student Member, IEEE,and H. Vincent Poor, Fellow, IEEE
Abstract—Early detection of the entrance of a new user intoa multiuser communication channel is considered. The matrixCUSUM (cumulative-sum) test, a multialternative quickest changedetection method, is introduced and then applied to this problem.The general behavior of this algorithm is described in analyticalresults and simulations.
Index Terms—Code division multiple access (CDMA), multial-ternative change detection, online change detection, quickest de-tection, user activity detection.
I. INTRODUCTION
I N a direct-sequence/code-division multiple-access(DS-CDMA) wireless communication environment, mul-
tiuser detectors can give superior performance by exploitingknowledge of the signaling multiplex. However, changes in theuser population due to the random access and bursty natureof such channels can result in degradation of a multiuserreceiver’s performance if it does not react quickly to suchchanges and adapt itself to incorporate the new conditions intothe detector structure. The issue of learning, in a nonsequentialmanner, and integrating the knowledge of a new transmittinguser into a multiuser receiver is studied in [8]. Also in [5], theidentification of a new user in a CDMA system by detectingthe entrance of a new user and its parameters is studied usingfixed sample sizes and again in a nonsequential manner.
Here, we consider the online detection/isolation of a changein the received signal structure in a CDMA system, focusingon the entrance of a new user into the system. In particular, weconsider the situation in which a new user enters the systemat a random instant, choosing a spreading code from a finiteset known to the receiver. The entry time and the type of theuser (i.e., the spreading code chosen from the available set) areunknown. Furthermore, the bit stream transmitted by the newuser is random, and hence unknown to the receiver. Our purposeis to detect (decide whether a change has occurred) and isolate(decide on the type of the change) as quickly as possible whensuch an event occurs.
Manuscript received October 1, 2000; revised September 15, 2001. This workwas supported by the U.S. Office of Naval Research under Grant N00014-00-1-0141. The material in this paper was presented in part at the IEEE Sixth Inter-national Symposium on Spread Spectrum Techniques and Applications, Parsip-pany, NJ, September 6–8, 2000 and IEEE International Symposium on Infor-mation Theory, Washington, DC, June 24–29, 2001.
The authors are with the Department of Electrical Engineering, PrincetonUniversity, Princeton, NJ 08544 USA (e-mail: [email protected];[email protected]).
Communicated by U. Madhow, Associate Editor for Detection and Estima-tion.
Publisher Item Identifier S 0018-9448(02)00313-9.
This paper is organized as follows. In Section II, we definethe signal model and put the problem of interest into the multi-alternative change detection framework. In Section III, we de-scribe, based on the work of Nikiforov [10], the basic criteriainvolved in the design of multialternative change detection al-gorithms. Then we describe briefly Page’s CUSUM test andNikiforov’s generalized change detection algorithm, which is anatural extension of Page’s test for the multialternative case. InSection VI, we introduce the matrix CUSUM method by modi-fying Nikiforov’s algorithm and putting it into a recursive formwhich makes it possible to use in an online fashion. We alsoshow that the matrix CUSUM method preserves the asymptoticoptimality of Nikiforov’s algorithm. Then, in Section VII, weapply this method to the problem of user activity detection in aCDMA system. We also introduce two suboptimal approachesthat require less knowledge about the signal model than the op-timal likelihood ratio based method. Finally, we provide somesimulation results and conclusions.
II. SIGNAL MODEL
Consider the following model [12] for the received signal ina synchronous DS-CDMA channel with active users. Afterchip-matched filtering and chip rate sampling, the receivedsignal vector can be modeled as
(1)
where is the symbol index and , , and denote, re-spectively, the received amplitude, the bit (we assume binaryantipodal symbols) at theth signaling interval, and the
normalized unit energy signature waveform vector (i.e., thespreading code) of user. It is assumed that is a collec-tion of independent equiprobable random variables, that
is a white Gaussian noise vector sequence withmeanand covariance , ( is the identity matrix), andthat is independent of . For simplicity, we haveassumed a baseband model, although this can easily be gener-alized to the complex case.
We can rewrite the received vector as
(2)
where is the diagonal matrix of user am-plitudes, i.e.,
and
It is assumed that is a linearly independent set of vec-tors and that .
0018–9448/02$17.00 © 2002 IEEE

478 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
Let and denote a set of linearly in-dependent signature waveform vectors that are also linearly in-dependent from the set . A new user entering the systemchooses a spreading code from, so that linear independenceis preserved. Here, we consider the problem of detecting suchan event and deciding which element ofhas been selected bythe new user.
We can cast the above problem as a multialternative se-quential change detection problem in the discrete-time randomprocess . A change is said to occur when a new userbecomes active. The entry time and the type (the spreadingcode of the new user) are unknown.
Let the unknown change time be denoted byand let bethe hypothesis that the spreading codeis assigned to the newuser at the change time. Hence under ,we have
(3)
We can define composite hypotheses for, each corresponding to a different change type.
Then we have a total of hypotheses about the type of change,plus the null-hypothesis which represents the no-change sit-uation ( ).
III. T HE MULTIALTERNATIVE CHANGE DETECTION/ISOLATION
PROBLEM
Unlike the classical change detection problem, where there isonly one distribution after the change, in the multialternative(also called multihypothesis) change detection case there aremultiple available distributions for the process after the changepoint, and the goal is not only to detect the change but also to de-termine the correct post-change distribution, i.e., correct isola-tion. Although there has been extensive research on the changedetection problem, the much harder problem of handling bothdetection and isolation of a change is still largely open. A prin-cipal reason behind this is the fact that criteria of optimalitythat combine detection and isolation cannot be described con-veniently due to the contradictory nature of the requirementsbehind these two issues. For instance, a short detection delay isdesirable, but one can improve upon the isolation of the changeat the cost of incurring a longer decision delay. Therefore, asopposed to making the combined detection and isolation delayas short as possible, one can think of a scheme that performsdetection first (by detecting just the occurrence of a change, notthe type of it) and then collects more data in order to improvethe accuracy of isolation. One can imagine that such an algo-rithm would have larger final detection/isolation delay but withhigher probability of correct isolation than that of a scheme thatperforms both at the same time. Here, we describe a frameworkfor multialternative change detection and isolation to addressthese issues, following closely the treatment of Nikiforov [10].After the description of Nikiforov’s approach to this problem,we will propose a new algorithm called the matrix CUSUM testbased on this framework.
Assume that we have a set of known distinct probability den-sity functions (pdfs) and we observe sequen-tially a sequence of independent random variables .The random variables are initially distributed according to themarginal probability density until a time instant after whichthe marginal density function changes tofor some
. Both the change pointand the type of change (the value of) are unknown. The purpose is to design a sequential algorithm
that detects and isolates (determines the value of) a changeas quickly as possible while keeping a low false alarm/isolationrate.
We make the following definitions. Let be the jointdistribution of the sequence of independent random variables
in which are indepen-dent and identically distributed (i.i.d.) with pdf and
are i.i.d. with probability density .Let denote expectation under . We also defineto denote the no-change, normal mode of the system, i.e.,
are i.i.d. , and to be the expecta-tion under . Similarly, for , we will use for
, and for , as a shorthand for the case where the( -type) change time , namely, are i.i.d. .
A change detection/isolation algorithm is a pair whereis a stopping time (called thealarm timeof the algorithm)
adapted to the observations, andis a decision function takingvalues in the set where means that achange of type is declared.
Now, we will describe performance indexes proposed byNikiforov for the multialternative change detection problem. Inorder to do this, we first define the sequence of alarm times
(4)
where is the alarm time of an algorithm of interest appliedto , and we let denote thedecision sequence associated with this sequence of alarm times.Then, we define the following quantity to denote the first alarmtime that declares a change of type:
(5)
False Alarm Times: Let the observations come from thenormal mode of the system ( i.i.d. with density ).In this case, is the false alarm time of type. Namely, itis the first alarm time declaring a change of typewhen in factno change has occurred.
False Isolation Times: Assume that we have an-typechange with change time . That is, the observations
are i.i.d. with density function . (Obvi-ously, we need not restrict ourselves to , since a changemight occur at any time, but this assumption is made in the falseisolation analysis to avoid uncertainties in the initial conditionsbefore change.) Then, in the case when is thefalse isolation time of type, meaning that it is the first alarmtime declaring a change of typewhereas the true change typeis .
The mean time before a false alarm or a false isolation of-type is

OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 479
where for as defined before.Then, the minimum of the mean times before a false alarm or afalse isolation is given by
(6)
Finally, the worst mean detection/isolation delay of an-typechange is defined as
(7)
and the worst mean detection/isolation delay is then given by
(8)
We have the followingminimaxdesign criterion proposed byNikiforov in [10]: minimize the worst mean detection/isolationdelay in the class of all change detection/isolation algo-rithms , such that , for a prescribed lowerbound .
IV. PAGE’S CUSUM TEST
Before continuing with the multialternative case, let us re-call briefly Page’s CUSUM test [2], [6], [11] applied to detecta single change in the distribution of independent random vari-ables observed sequentially. Suppose is a sequenceof independent random variables where arei.i.d. with probability density , and are i.i.d.with probability density where is an unknown time instant(possibly ). So in this case, we have a single post-changedistribution.
Page’s test for these hypotheses is to declare a detection thefirst time the CUSUM statistic
(9)
or the equivalent recursive form
(10)
exceeds a threshold , where and
is the log-likelihood function (or score function) which shouldsatisfy . Recall that isthe Kullback–Leibler distance between the two densities and isalways positive, while is always negative.
Thus, the stopping time of the CUSUM algorithm is givenby
(11)
or
(12)
For this algorithm we have the following well-known result ofLorden [6]:
and as (13)
This algorithm is known to be optimal in the minimax sense forthis case of a single post-change hypothesis [6], [9]. The idea
behind the CUSUM algorithm is that it stops at the first timeinstant such that, for some , the log-likelihood ratio testto decide between the hypotheses
i.i.d.
and
i.i.d.
exceeds a certain threshold. The basic operating principle of therecursive form (10) is that, before the change,so that remains close to zero; whereas after the change,starts drifting upward with a positive meanuntil it ultimately crosses the threshold.
V. NIKIFOROV’S GENERALIZED CUSUM TEST
Let us now continue with the multialternative problem and in-troduce the following change detection/isolation algorithm sug-gested by Nikiforov [10]. Define the pair by
and (14)
where, for
(15)
and
and where is a selected threshold.Interpretation : , the stopping time responsible for de-
tection of change of type, is the first time at which, forsome , every likelihood ratio test between versus
, based on the observationsexceeds a given threshold. And then, is the first time thishappens for any value of, while is the corresponding valueof .
Recall that we observe a sequence of independent randomvariables with marginal probability density , in whichthe density changes at an unknown instant, from to , forsome . Let us introduce the following hypothesesabout the observations at time :
are i.i.d with pdf (16)
and, for and
are i.i.d with pdf
are i.i.d with pdf(17)
The log-likelihood ratio between the hypotheses
, and , is given by
where for we use the notation .In Nikiforov’s generalized CUSUM test, we have stop-
ping times, , each of which is responsible

480 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
for detection of a change of the type given by its superscript,and the final stopping time is given as the minimum of thesestopping times. The idea behind this algorithm, which is a gen-eralization of Page’s CUSUM test to this multialternative case,is that we stop at the first time instantand declare a changeof type , when for some the generalized log-likelihoodratio (GLR) test between the composite hypothesis
i.i.d
and
i.i.d.
corresponding to the case where either no change or a changeother than type has occurred at time, versus the simple alter-native , exceeds a certain threshold. The GLR for thisproblem is given by
from which (15) follows.We can offer an analogous interpretation based on applica-
tion of parallel one-sided sequential hypothesis tests. The mul-tihypothesis sequential probability ratio test (MSPRT) [4] whichwas first suggested by Armitage [1], then Lorden [7], is de-scribed in the following manner. We observe sequentially ani.i.d. random sequance , with marginal probabilitydensity , for some . Hence, under hypothesis
. Then the MSPRT is given by the pair, in which is the stopping time and is the final deci-
sion, which are defined according to [1], [4], [7] as follows:
and
where
(18)
with
the log-likelihood ratio between hypothesis and .The stopping time is devised again on the following in-
tuitive idea: is the first time at which each likelihood ratiobetween versus , for exceeds a cer-tain threshold . Basically, we have likelihood ratiotests (for every versus ) running si-multaneously and stop when all of them decide in favor ofconcurrently.
Now, for the multialternative change detection scheme,choosing a common threshold value for all , we can
define the following set of MSPRTs activated at each possiblechange time :
(19)
and the final stopping time which corresponds to the first timeinstant at which any one of these MSPRTs stops, is then givenby
(20)
From (19) and (20) we obtain (15).Nikiforov’s algorithm is proved in [10] to be asymptotically
optimal with respect to the minimax criterion. Namely, as, Nikiforov’s algorithm minimizes the worst mean
detection/isolation delay in the class of all sequentialdetection/isolation algorithms that satisfy(6). The main optimality result is the following (compare with(13)):
and as (21)
where
and
VI. THE MATRIX CUSUM ALGORITHM
The main drawback of the above multialternative change de-tection algorithm is that it does not admit a recursive form so thatthe number of required operations and the amount of requiredmemory grow with time, which makes it computationally pro-hibitive for situations in which decisions must be made online.In order to overcome these problems, we modify Nikiforov’s al-gorithm and develop now a recursive procedure, which we callthe matrix CUSUM algorithm.
To develop this algorithm, we replace themax minin (15)with min max, and define
(22)
The algorithm is then given by the stopping time and the deci-sion function pair which are defined in the same way asNikiforov’s, i.e.,
and
(23)Interpretation : , the stopping time responsible for de-
tection of change type, is the first time , such that for each, the likelihood ratio test between and
based on the observations , for some , ex-ceeds a given threshold. Hence, for each change type, wehave again binary hypothesis tests between each alternative
, against and decide on typewheneverall these tests result in a decision in favor of.
OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 481
TABLE ICOMPARISON OF THEGENERALIZED CUSUM AND THE MATRIX CUSUM ALGORITHMS
In Nikiforov’s scheme all the tests are based on the same setof observations, whereas in this case each test betweenandmay use a different set of observations. Hence this approach isalso a powerful candidate for multialternative change detection(see Table I).
We recognize in (22) as a CUSUMstatistic (cf. (9) and (10)) which then gives it the followingrecursive implementation:
(24)
with
(25)
where the score function and .Now, we can clearly see that the matrix CUSUM algorithm is
simple to compute, recursive in nature, and can be implementedin a very efficient way. The algorithm operates in the followingmanner. Let be the matrix with elements
......
......
(26)
That is, the th row of consists of .Define
(27)
and
...
of 1st row ofof 2nd row of
...of th row of
(28)
At the time instant , we observe the sample and updateto according to (25). Then we compute the minimum
of each row of and store these minima in the vector. We stop at the first time instant when an ele-
ment of exceeds the threshold, and declare a change oftype . Hence, we can equivalently write
(29)
and
(30)
To further reduce the number of operations, the algorithm can beimplemented using log-likelihood ratio calculations insteadof . In order to see this, first we write
(31)
and define . Then it iseasy to see that the update of the matrixcan be performedvia
and

482 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
where is an vector of allones, is an diagonal matrix with the elementsof on its main diagonal, and the operation is appliedelement-wise.
Now, let us explain the basic principle behind this algorithm.Assume that an-type change occurs at change time. The teststatistics , defined in (27), will tend to stayclose to zero for up to the change point. Then, after thechange time, while starts drifting up with a positive mean,the rest of the test statistics will tend toremain close to zero for . In order to better understand theunderlying mechanism that is responsible for this we can makethe following observations.
First consider the before-change situation, i.e., and. From (31) and using the fact that ,
we see that
for
Hence the main diagonal of the matrix consisting of theCUSUM statistics
will be decisive in keeping the test statisticsclose to zero due to the facts that and we takethe minimum of each row of .
Next, let us examine the after-change situation, i.e.,and . This time, writing the score function as
and using the fact that , we see that
Then, for each row of the matrix other than theth row, theCUSUM statistics in theth column
will be decisive in keeping the test statisticsclose to zero or prevent them from an upward drift
after the change, due to the facts that and.
Now consider the th row of . All the CUSUM statisticsin the th row include score functions with positive mean
values , and the one withthe minimum mean score will influence the upward drift rate of
.The following two lemmas are useful in assessing the perfor-
mance of the matrix CUSUM algorithm. In particular, we seethat the matrix CUSUM algorithm also satisfies the asymptoticoptimality result of Nikiforov’s algorithm.
Lemma 1: Let the pair denote the stopping time andthe decision rule of the matrix CUSUM algorithm. Then, the
minimum of the mean times before a false alarm or a false iso-lation defined in the following sense satisfies the inequality
Proof: We recall that
(32)Now, define
(33)from which it follows that
Since each is a Page’s CUSUM stopping rule, we have(from (13)). Hence,
for (34)
Next, we will show that
for(35)
According to the definition andfrom the description in (4), we have , and , for ,is given by
(36)
where, for
(37)
and
(38)
together with
and (39)
Notice that we have [see (23)–(25)].Now, suppose the outcome is such that for some
. This means that, in the case when , we have
, and when , we have , for , and
. Then, it is easy to see that . Because, for
, we clearly have , and for the equalityoccurs if and only if for and ,which obviously corresponds to the condition under which itwill take the longest for to cross the threshold. Hence,
, from which (35) follows since . Finally,together with (34) we obtain
for
from which the lemma follows.
Lemma 2: The worst case mean detection/isolation delay ofthe stopping time in the matrix CUSUM algorithm satisfies
as
where is defined as in (21).

OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 483
Proof: Since, for each , we have
then, for the same threshold value, the test statistic for the stop-ping time will reach the threshold sooner than it does inNikiforov’s stopping time . Hence
From (19), (20), and (23) we have
and
and according to Lemma 2 of Nikiforov [10]
as (40)
We also have . This is due to the fact that,when the test statistic is zero immediately before the changetime (which is the case for , since we have ), itwill take the longest for (29) to reach the threshold.
Combining all of the above we get
and using (40) we have
as
This completes the proof of the lemma.
The above lemma is also very intuitive according to the obser-vations made before. For a change of type, the expected detec-tion delay as will be where
(the test statistic would on the average show an upward driftwith a mean ), and the worst case is the one in which thechange type is the , so that it would take thelongest to detect.
VII. A PPLICATION OF THEMATRIX CUSUM IN A
DS-CDMA CHANNEL
Having introduced the matrix CUSUM test, we can nowapply it to the problem of user activity detection in a CDMAsystem. Returning to the model of Section II, we notice that themarginal pdf of the observed sequence, , under changetype , is given by
and
This expression is not only computationally very expensive(complexity increases exponentially with the number of users
in the system), but also requires knowledge of all theparameters in the system such as the amplitudes and spreadingcodes of all the users. Thus, the likelihood-based processingneeded for direct application of the matrix CUSUM is unwieldyin this case, and we need to reformulate the problem to makeit more manageable. In order to do this, we discuss in thenext subsection a model [2] similar to that of our problem andintroduce a solution which we will then apply to our case.
A. Change Detection in a Regression Model
In reference to (3), consider the following model for:
(41)
in which is the unknown change time and we treatas a nonrandom unknown parameter sequence,
while the nonrandom vector parameter, after a-type change, is assumed to be known. We have the
following density functions for :
(42)
and
(43)
Based on the assumption thatis of full column rank and thedimension of the observation vector is greater than the di-mension of , we will design an algorithm which exploits thisredundancy in a way that results in a simple approach to thiscomplex change detection problem. To this end, in place of thelog-likelihood ratios in the matrix CUSUM algorithm(25), we use the GLR with respect to the unknown parameter
, given by
where denotes the maximum-likelihood estimate of theunknown parameter under the distribution , for
. Thus, under the assumption of Gaussian noise, is equalto the least squares estimate, which is given by
for
and

484 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
On defining as the projection matrix ontothe column space of and as the projection ontothe left null space, the orthogonal complement of the columnspace of , we have
and
Then, the solution to the problem (41) becomes equivalent tothe one for a change detection problem in the following simplermodel:
where and .
B. Likelihood-Based Method Using Orthogonal Projection
We can now follow a similar approach in order to simplifyour original problem of new-user detection in a CDMA net-work. Therefore, considering again (3), letbe anorthonormal matrix such that the column space of, denotedby , is the orthogonal complement of , the column spaceof , also called the signal subspace spanned by the existingusers. So and . Note that in order tocalculate , we need not know the individual spreading codesof the current users; it is enough to know their span. (Thiscan be estimated via subspace methods [16].) Transformationby removes the interference of the existing users and makesthe problem easier to handle while still carrying essential infor-mation about the change.
Define as the transformed observables.Similarly let , and . Then under
, we have
(44)where is a zero mean white Gaussian process with co-variance .
Note that is a sequence of independent random vec-tors such that, before a change occurs,are i.i.d. with Gaussian density , and aftera change of type are i.i.d. with Gaussianmixture pdf,
Thus, the log-likelihood ratios for andare given by
(45)
where, for
(46)
Recall that the performance of the matrix CUSUM algorithmcan be characterized by the pairwise Kullback–Leibler distances
(see Lemma 2). From the above, for and, we have
and for and , we have
Define and . Then for itfollows that
and
We will use the following inequality to obtain bounds on the’s:
(47)After some algebra we have
and

OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 485
where
Then using (47) we can bound as where
and
and the worst case mean detection/isolation delay of the matrixCUSUM algorithm is asymptotically bounded betweenand
.
C. Nonlikelihood-Based Methods
In the classical (single alternative) CUSUM test of (9)–(12)the log-likelihood ratio can be replaced by any other appropriatescore function that also has the property thatand (yielding negative pre-change drift andpositive post-change drift to the CUSUM statistic), in whichcase we get the following for the stopping time(see [2], [3]):
and as
(48)where is the (nontrivial) root of the equation. Here, we will apply a similar approach in the multialternative
case in order to achieve a low-complexity detection scheme.In the previous subsection, in order to calculate the log-likeli-
hood ratios we needed to know the new user’s amplitudewhich is not always a realistic assumption. The noise variance
and the orthogonal complement of the current signal sub-space are also needed. However, the availability of theselatter quantities is a reasonable assumption since they are char-acteristics of the subspace structurebeforethe change. In thissubsection, we will replace the score function in the matrixCUSUM by an alternative to the log-likelihood ratio in orderto develop methods that require knowledge of only the signalsubspace to work.
Recall, according to (3), the received signal model before thechange
(49)
The autocorrelation matrix of the received signal is given by
(50)
Performing eigendecomposition of, we have
(51)
where
with
and . It is easy to see that the range space ofis equal to the signal subspace , and the range spaceof is the orthogonal complement of , i.e., .
Next, in order to replace the likelihood ratios in the matrixCUSUM test, we will seek useful score statistics based on thepre-changesubspace structure, which is assumed to be the onlyinformation available.
1) A Decorrelator-Based Matrix CUSUM:Suppose wehave a change of type, in which case the received signal afterthe change is given by
(52)
The vector
(53)
has the property that the projection is decorrelatedfromthe current (pre-change) signal subspace (see Wang and Poor[16]). In particular, we have
(54)
Thus, it makes sense to use the matrix CUSUM method with thescore function replaced by the following:
(55)
and
(56)
which will make the algorithm behave like a bank of energyaccumulators each tuned to a different new user.
Let us consider the after-change situation and look at thethrow of the CUSUM matrix corresponding to the change type. Since we have , then
(57)We require that all s have positive means after thechange. This requirement is easily fulfilled. As an example,consider the case in which the signature sequences are-se-quences of length with cross-correlation coefficient(see, e.g., [14]).
The matrix is the projection onto the orthogonal com-plement of the signal subspace ; i.e.,
(58)
When the columns of the matrix are -sequences, thecross-correlation matrix can be written as
(59)

486 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
where is a vector of all ones. Since the remainingof the signature codes are available for the new users,
we have
and (60)
Using the matrix inversion lemma
together with (58) and (60), we have
Substituting yields
Thus, from (57) we get for -sequences
Note that in this case, the (asymptotic) expected detection delaywill be approximately for moderately large . It also
follows that the fewer the number of current users, the easier(quicker) it will be to detect a new user.
Next, let us consider the rows of other than theth one. Ineach row, , there exists a CUSUM termwith so that
which will be in the case of -sequences.These terms will prevent the rest of the ’s from an upwarddrift and keep them close to zero.
Now, let us investigate the behavior of the decorrelator-basedmatrix CUSUM before the change point. We need to make surethat the test statistics stay close to zero beforethe change. According to the observations in Section VI, weneed to check the CUSUM statistics on the main diagonal of
. From the definition (55), we immedi-ately see that . Thus, in orderto have , we must add a negative bias term inthe definition of . But care should be taken in the choiceof magnitude of this bias term, because it will reduce the meanvalues after the change as well, which will increase the detec-tion delay. In particular, the algorithm will fail if the bias is sohigh that the mean values after the change become negative too.We will consider this issue again in the simulation examples.
2) A Minimum Mean-Square Error (MMSE)-Based MatrixCUSUM: We can alternatively adopt an MMSE based ap-proach to design an appropriate algorithm. Again, the receivedsignal after change typeis
(61)
The MMSE detector for the new user
(62)
is found as the solution to the following optimization problem(see Wang and Poor [16]):
minimize
subject to (63)
Now, the same arguments as before apply and in the followingwe investigate again the case where-sequences are used in thesystem to illustrate the behavior of the algorithm.
Since , using the matrix inversion lemmagives
Applying the matrix inversion lemma once again toand using (59), we get after some algebra
where and . We thenhave
where
and is the signal-to-noise ratio (SNR) of user.Inserting we have
where
Since , it is easy to see that
Hence the (asymptotic) expected detection delay will be, as be-fore, approximately . This algorithm will typically per-
form better than the decorrelator based one especially when thecurrent users have low SNRs so thatis close to zero. Also, aswith the decorrelator-based algorithm, a bias is needed to assurenegative pre-change drift.
VIII. SIMULATION RESULTS
We now verify the behavior of these algorithms via simu-lation. Using a length- normalized bipolar Gold sequencewith its cyclic shifts we generate signature waveformvectors with cross-correlation values belonging to the set
. We assume the number of current activeusers is 10, and assign the first of these vectors to theset while the remaining are left for the set . Inparticular, we take
• and ;
OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 487
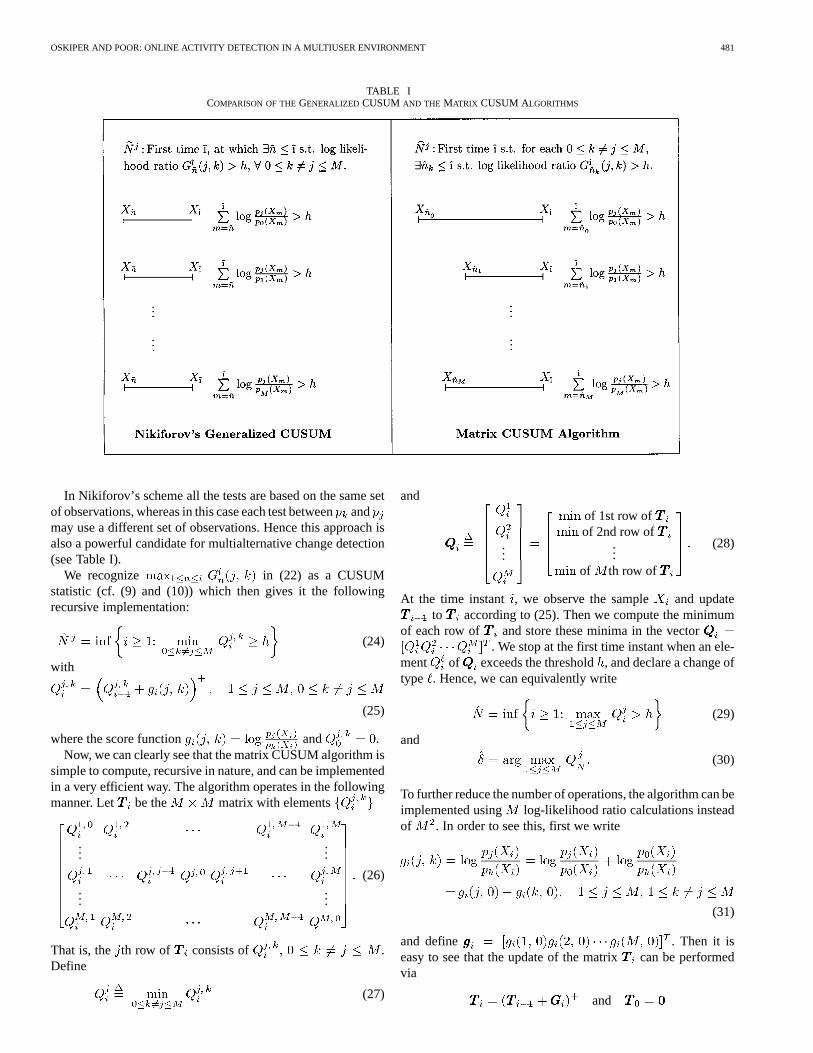
Fig. 1. Typical realization ofQ ; . . . ; Q versusi. (Likelihood ratio based matrix CUSUM.)
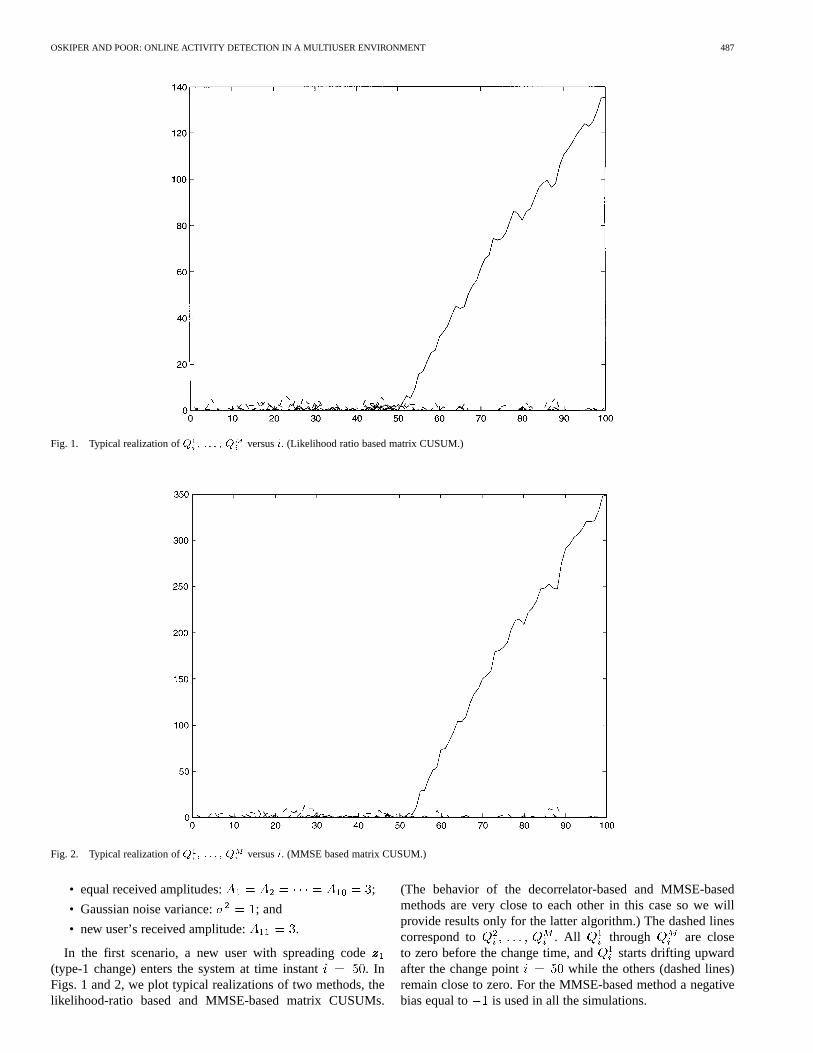
Fig. 2. Typical realization ofQ ; . . . ; Q versusi. (MMSE based matrix CUSUM.)
• equal received amplitudes: ;
• Gaussian noise variance: ; and
• new user’s received amplitude: .
In the first scenario, a new user with spreading code(type-1 change) enters the system at time instant . InFigs. 1 and 2, we plot typical realizations of two methods, thelikelihood-ratio based and MMSE-based matrix CUSUMs.
(The behavior of the decorrelator-based and MMSE-basedmethods are very close to each other in this case so we willprovide results only for the latter algorithm.) The dashed linescorrespond to . All through are closeto zero before the change time, and starts drifting upwardafter the change point while the others (dashed lines)remain close to zero. For the MMSE-based method a negativebias equal to is used in all the simulations.
488 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
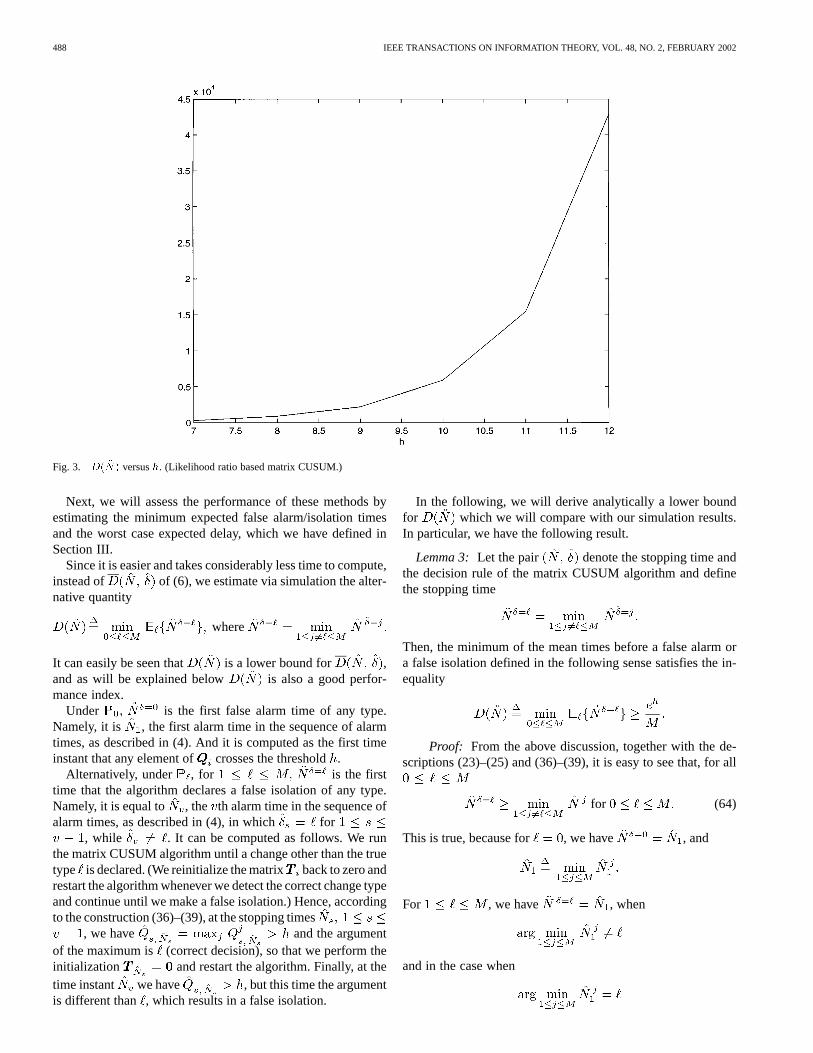
Fig. 3. D( �N) versush. (Likelihood ratio based matrix CUSUM.)
Next, we will assess the performance of these methods byestimating the minimum expected false alarm/isolation timesand the worst case expected delay, which we have defined inSection III.
Since it is easier and takes considerably less time to compute,instead of of (6), we estimate via simulation the alter-native quantity
where
It can easily be seen that is a lower bound for ,and as will be explained below is also a good perfor-mance index.
Under is the first false alarm time of any type.Namely, it is , the first alarm time in the sequence of alarmtimes, as described in (4). And it is computed as the first timeinstant that any element of crosses the threshold.
Alternatively, under , for is the firsttime that the algorithm declares a false isolation of any type.Namely, it is equal to , the th alarm time in the sequence ofalarm times, as described in (4), in which for
, while . It can be computed as follows. We runthe matrix CUSUM algorithm until a change other than the truetype is declared. (We reinitialize the matrix back to zero andrestart the algorithm whenever we detect the correct change typeand continue until we make a false isolation.) Hence, accordingto the construction (36)–(39), at the stopping times
, we have and the argumentof the maximum is (correct decision), so that we perform theinitialization and restart the algorithm. Finally, at thetime instant we have , but this time the argumentis different than , which results in a false isolation.
In the following, we will derive analytically a lower boundfor which we will compare with our simulation results.In particular, we have the following result.
Lemma 3: Let the pair denote the stopping time andthe decision rule of the matrix CUSUM algorithm and definethe stopping time
Then, the minimum of the mean times before a false alarm ora false isolation defined in the following sense satisfies the in-equality
Proof: From the above discussion, together with the de-scriptions (23)–(25) and (36)–(39), it is easy to see that, for all
for (64)
This is true, because for , we have , and
For , we have , when
and in the case when
OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 489
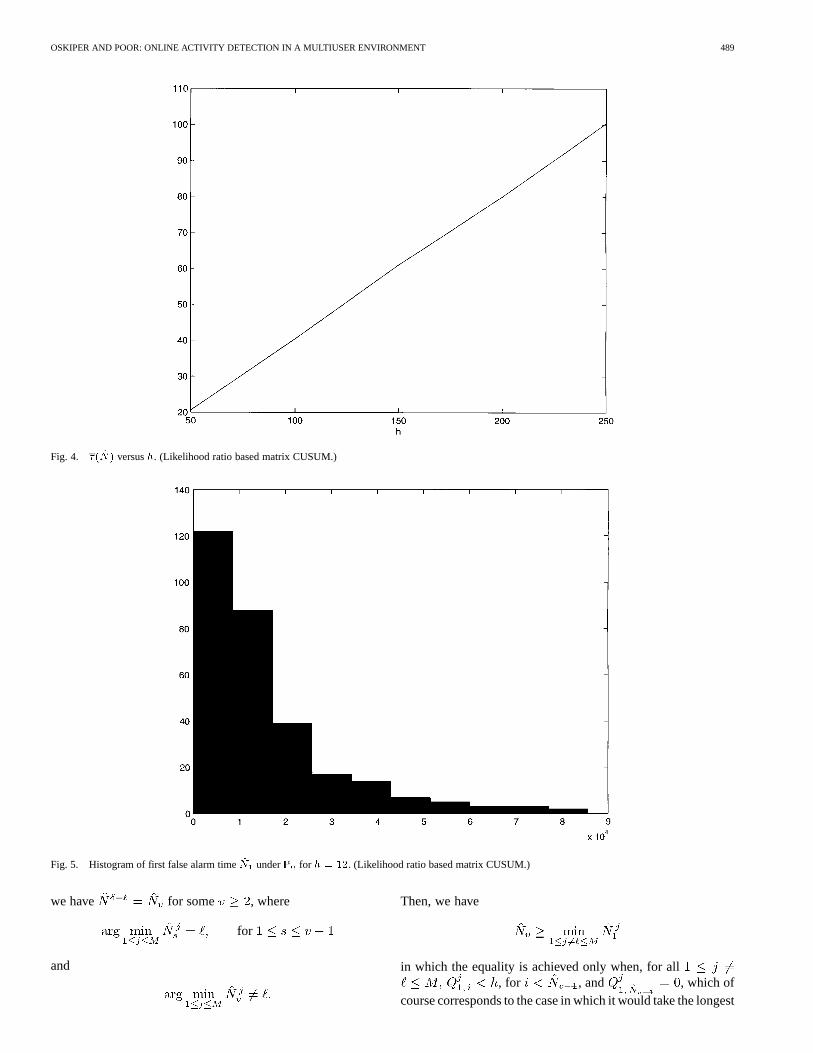
Fig. 4. �(N) versush. (Likelihood ratio based matrix CUSUM.)
Fig. 5. Histogram of first false alarm timeN under for h = 12. (Likelihood ratio based matrix CUSUM.)
we have for some , where
for
and
Then, we have
in which the equality is achieved only when, for all, for , and , which of
course corresponds to the case in which it would take the longest
490 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
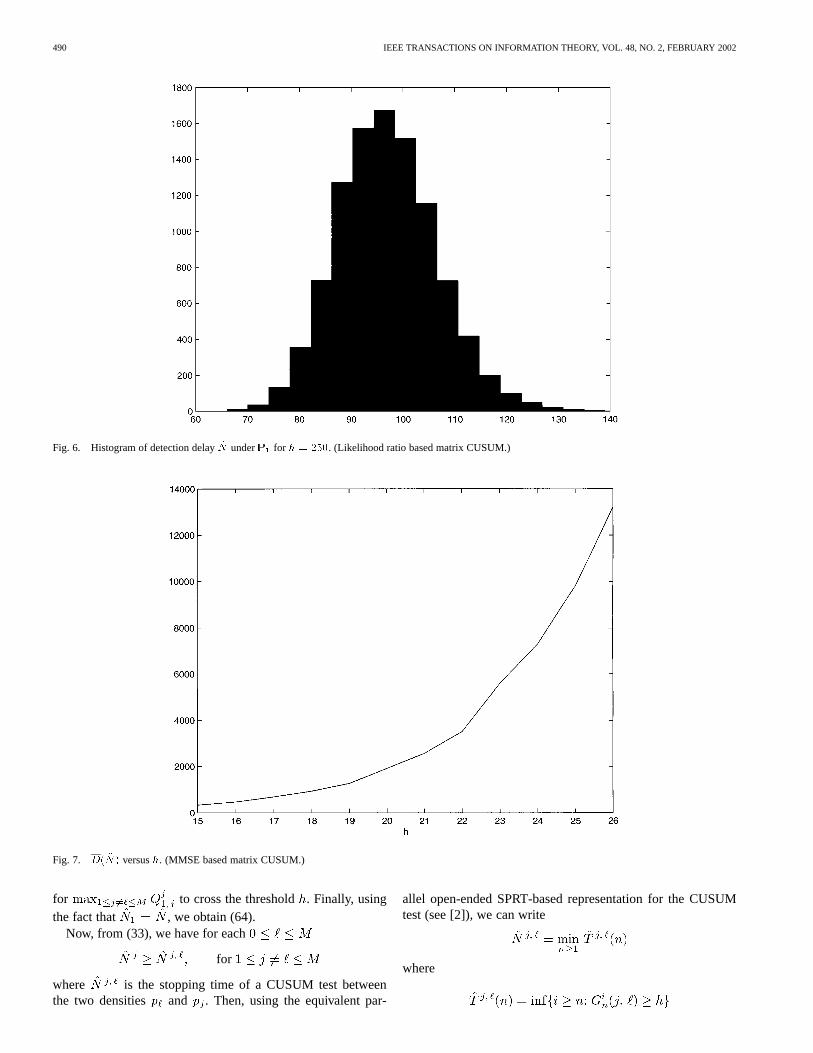
Fig. 6. Histogram of detection delayN under for h = 250. (Likelihood ratio based matrix CUSUM.)
Fig. 7. D( �N) versush. (MMSE based matrix CUSUM.)
for to cross the threshold. Finally, usingthe fact that , we obtain (64).
Now, from (33), we have for each
for
where is the stopping time of a CUSUM test betweenthe two densities and . Then, using the equivalent par-
allel open-ended SPRT-based representation for the CUSUMtest (see [2]), we can write
where
OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 491
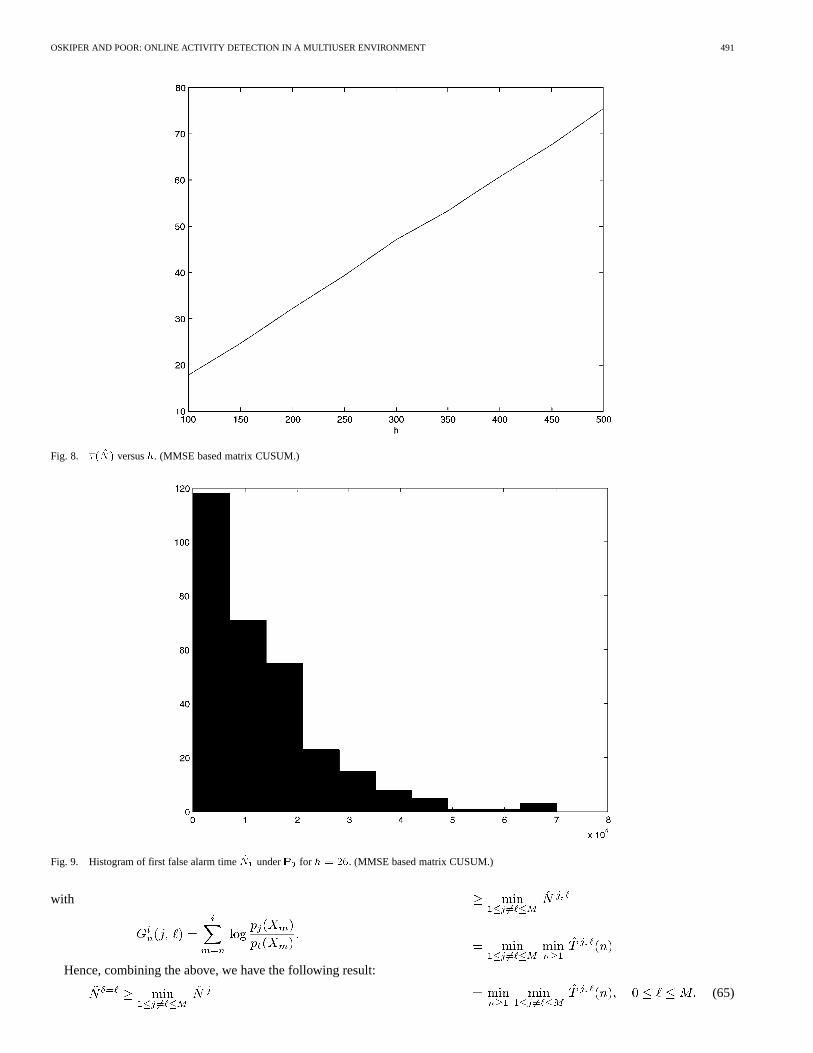
Fig. 8. �(N) versush. (MMSE based matrix CUSUM.)
Fig. 9. Histogram of first false alarm timeN under for h = 26. (MMSE based matrix CUSUM.)
with
Hence, combining the above, we have the following result:
(65)
492 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 48, NO. 2, FEBRUARY 2002
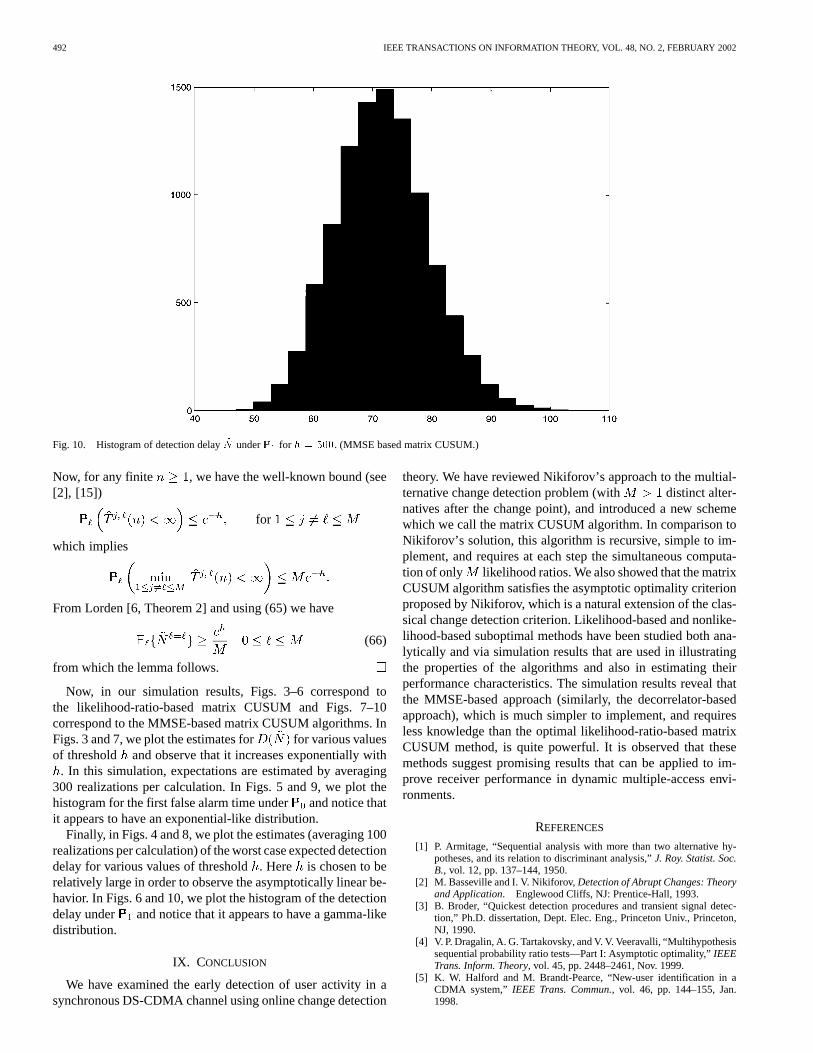
Fig. 10. Histogram of detection delayN under for h = 500. (MMSE based matrix CUSUM.)
Now, for any finite , we have the well-known bound (see[2], [15])
for
which implies
From Lorden [6, Theorem 2] and using (65) we have
(66)
from which the lemma follows.
Now, in our simulation results, Figs. 3–6 correspond tothe likelihood-ratio-based matrix CUSUM and Figs. 7–10correspond to the MMSE-based matrix CUSUM algorithms. InFigs. 3 and 7, we plot the estimates for for various valuesof threshold and observe that it increases exponentially with
. In this simulation, expectations are estimated by averaging300 realizations per calculation. In Figs. 5 and 9, we plot thehistogram for the first false alarm time under and notice thatit appears to have an exponential-like distribution.
Finally, in Figs. 4 and 8, we plot the estimates (averaging 100realizations per calculation) of the worst case expected detectiondelay for various values of threshold. Here is chosen to berelatively large in order to observe the asymptotically linear be-havior. In Figs. 6 and 10, we plot the histogram of the detectiondelay under and notice that it appears to have a gamma-likedistribution.
IX. CONCLUSION
We have examined the early detection of user activity in asynchronous DS-CDMA channel using online change detection
theory. We have reviewed Nikiforov’s approach to the multial-ternative change detection problem (with distinct alter-natives after the change point), and introduced a new schemewhich we call the matrix CUSUM algorithm. In comparison toNikiforov’s solution, this algorithm is recursive, simple to im-plement, and requires at each step the simultaneous computa-tion of only likelihood ratios. We also showed that the matrixCUSUM algorithm satisfies the asymptotic optimality criterionproposed by Nikiforov, which is a natural extension of the clas-sical change detection criterion. Likelihood-based and nonlike-lihood-based suboptimal methods have been studied both ana-lytically and via simulation results that are used in illustratingthe properties of the algorithms and also in estimating theirperformance characteristics. The simulation results reveal thatthe MMSE-based approach (similarly, the decorrelator-basedapproach), which is much simpler to implement, and requiresless knowledge than the optimal likelihood-ratio-based matrixCUSUM method, is quite powerful. It is observed that thesemethods suggest promising results that can be applied to im-prove receiver performance in dynamic multiple-access envi-ronments.
REFERENCES
[1] P. Armitage, “Sequential analysis with more than two alternative hy-potheses, and its relation to discriminant analysis,”J. Roy. Statist. Soc.B., vol. 12, pp. 137–144, 1950.
[2] M. Basseville and I. V. Nikiforov,Detection of Abrupt Changes: Theoryand Application. Englewood Cliffs, NJ: Prentice-Hall, 1993.
[3] B. Broder, “Quickest detection procedures and transient signal detec-tion,” Ph.D. dissertation, Dept. Elec. Eng., Princeton Univ., Princeton,NJ, 1990.
[4] V. P. Dragalin, A. G. Tartakovsky, and V. V. Veeravalli, “Multihypothesissequential probability ratio tests—Part I: Asymptotic optimality,”IEEETrans. Inform. Theory, vol. 45, pp. 2448–2461, Nov. 1999.
[5] K. W. Halford and M. Brandt-Pearce, “New-user identification in aCDMA system,” IEEE Trans. Commun., vol. 46, pp. 144–155, Jan.1998.
OSKIPER AND POOR: ONLINE ACTIVITY DETECTION IN A MULTIUSER ENVIRONMENT 493
[6] G. Lorden, “Procedures for reacting to a change in distribution,”Ann.Math. Statist., vol. 42, no. 6, pp. 1897–1908, 1971.
[7] , “Nearly-optimal sequential tests for finitely many parametervalues,”Ann. Statist., vol. 5, pp. 1–21, 1977.
[8] U. Mitra and H. V. Poor, “Adaptive decorrelating detectors for CDMAsystems,”Wireless Commun., vol. 2, pp. 415–440, 1996.
[9] G. Moustakides, “Optimal procedures for detecting changes in distribu-tions,” Ann. Statist., vol. 14, pp. 1379–1387, 1986.
[10] I. V. Nikiforov, “A generalized change detection problem,”IEEE Trans.Inform. Theory, vol. 41, pp. 171–187, Jan. 1995.
[11] E. S. Page, “Continuous inspection schemes,”Biometrika, vol. 41, pp.100–115, 1954.
[12] H. V. Poor and G. W. Wornell, Eds.,Wireless Communications: SignalProcessing Perspectives. Upper Saddle River, NJ: Prentice-Hall, 1998.
[13] H. V. Poor,An Introduction to Signal Detection and Estimation. NewYork: Springer- Verlag, 1994.
[14] J. G. Proakis,Digital Communications. New York: McGraw-Hill,1995.
[15] A. Wald, Sequential Analysis. New York: Wiley, 1947.[16] X. Wang and H. V. Poor, “Blind multiuser detection: A subspace ap-
proach,”IEEE Trans. Inform. Theory, vol. 44, pp. 677–690, Mar. 1998.


















