ON NON-LINEAR OSCILLATIONS WITH SLOWLY V AR · PDF fileConsider the oscillations of two...
9
Journal of Sound and Vibration (1978) 61(2),293-301 ON NON-LINEAR OSCILLATIONS WITH SLOWLY VARYING SYSTEM PARAMETERS S. C. SINHA Department of Mechanical Engineering, Kansas State University, Manhattan, Kansas 66506, U.S.A. AND c. C. CHOU Safety LaboratoriesDepartment,FordMotor Company,Dearborn,Michigan48121, U.S.A. (Received 14 March 1978, and in revisedform 12 .July 1978) The paper deals with an approximate analysis of non-linear oscillation problems with slowly varying system parameters. From the differential equations for amplitude and phase, set up by the method of variation of parameters, the approximate solutions are obtained by using the generalized averaging method of Sinha and Srinivasan based on ultraspherical polynomial expansions. The Bogoliubov-Mitropolsky results are given by a particular set of these polynomials. Problems of a single degree of freedom system as well as mono- frequency oscillations in systems with multiple degrees of freedom are considered. The approach has been illustrated by an example and the results are compared with the numeri- cal solutions. A close agreement is found. 1. INTRODUCTION Recently Sinha and Srinivasan [1,2] introduced the idea of a generalized averaging tech- nique for quasi-linear oscillatory systems by the use of ultraspherical polynomials. In a manner similar to that when the approach of Krylov-Bogoliubov [3] is used, the corres- ponding linear problem reduced to the case of an undamped simple harmonic oscillator. Later, the method was extended by Anderson [4, 5] to include the effect of a viscous damping term in the corresponding linear equation of motion. More recently Rangacharyulu, Srinivasan and Dasarathy [6] and Srirangarajan and Srinivasan [7] have further extended the method to study coupled non-linear systems and third order non-linear systems, respectively. Srirangarajan and Srinivasan [8] have also applied the method to arbitrary pulse excitation of second order systems. However, all these studies deal only with those systems where the system parameters, e.g., mass, stiffness, friction coefficient, etc., remain constant during the motion. Non-linear systems with slowly varying parameters have been studied by Bogoliubov and Mitropolsky [9] and Mitropolsky [10]. The purpose of the present investigation is to extend the Sinha and Srinivasan averaging method to quasi- linear oscillation problems with slowly varying system parameters. Problems of free oscillation and step response of systems with a single degree of freedom as well as mono- frequency oscillations in systems with multiple degrees of freedom are considered. The method has been illustrated through an example and the approximate analytical results are compared with numerical solutions. 2. APPROXIMATE ANALYSIS 2.1. PROBLEMS OF SINGLE DEGREE OF FREEDOM SYSTEMS 2.1.1. Free oscillation Many problems of non-linear oscillations of systems with a single degree of freedom and 293 0022-460X/78/220293 +09 $02.00/0 @ 1978 Academic Press Inc. (London) Limited
Transcript of ON NON-LINEAR OSCILLATIONS WITH SLOWLY V AR · PDF fileConsider the oscillations of two...

Journal of Sound and Vibration (1978) 61(2),293-301
ON NON-LINEAR OSCILLATIONS WITH SLOWLY VARYINGSYSTEM PARAMETERS
S. C. SINHA
Department of Mechanical Engineering, Kansas State University, Manhattan, Kansas 66506, U.S.A.
AND
c. C. CHOU
Safety LaboratoriesDepartment,FordMotor Company,Dearborn,Michigan48121,U.S.A.
(Received 14 March 1978, and in revisedform 12 .July 1978)
The paper deals with an approximate analysis of non-linear oscillation problems withslowly varying system parameters. From the differential equations for amplitude and phase,set up by the method of variation of parameters, the approximate solutions are obtainedby using the generalized averaging method of Sinha and Srinivasan based on ultrasphericalpolynomial expansions. The Bogoliubov-Mitropolsky results are given by a particular setof these polynomials. Problems of a single degree of freedom system as well as mono-frequency oscillations in systems with multiple degrees of freedom are considered. Theapproach has been illustrated by an example and the results are compared with the numeri-cal solutions. A close agreement is found.
1. INTRODUCTION
Recently Sinha and Srinivasan [1,2] introduced the idea of a generalized averaging tech-nique for quasi-linear oscillatory systems by the use of ultraspherical polynomials. In amanner similar to that when the approach of Krylov-Bogoliubov [3] is used, the corres-ponding linear problem reduced to the case of an undamped simple harmonic oscillator.Later, the method was extended by Anderson [4, 5] to include the effect of a viscousdamping term in the corresponding linear equation of motion. More recently Rangacharyulu,Srinivasan and Dasarathy [6] and Srirangarajan and Srinivasan [7] have further extendedthe method to study coupled non-linear systems and third order non-linear systems,respectively. Srirangarajan and Srinivasan [8] have also applied the method to arbitrarypulse excitation of second order systems. However, all these studies deal only with thosesystems where the system parameters, e.g., mass, stiffness, friction coefficient, etc., remainconstant during the motion. Non-linear systems with slowly varying parameters have beenstudied by Bogoliubov and Mitropolsky [9] and Mitropolsky [10]. The purpose of thepresent investigation is to extend the Sinha and Srinivasan averaging method to quasi-linear oscillation problems with slowly varying system parameters. Problems of freeoscillation and step response of systems with a single degree of freedom as well as mono-frequency oscillations in systems with multiple degrees of freedom are considered. Themethod has been illustrated through an example and the approximate analytical resultsare compared with numerical solutions.
2. APPROXIMATE ANALYSIS
2.1. PROBLEMS OF SINGLE DEGREE OF FREEDOM SYSTEMS
2.1.1. Free oscillation
Many problems of non-linear oscillations of systems with a single degree of freedom and293
0022-460X/78/220293 +09 $02.00/0 @ 1978 Academic Press Inc. (London) Limited

294 s. C. SINHA AND C. C. CHOU
slowly varying system parameters can be reduced to
d
[dX
] (dX
)dt m(r) dt + k(r)x = ef " x, dt ' (1)
where f(" x, dx/dt) is a non-linear function of " x and dx/dt, e is the small positive non-linearity parameter, m(,) is the variable mass, k(,) is the variable stiffness, and, is the"slowing time" defined by, = et. It is assumed that m(,), k(,) andf(" x dx/dt) are sufficientlysmooth with respect to , for all finite values of, and m(,) > 0, k(,) > O.
With e = 0 and considering, as a constant, equation (1) admits the solution
x = a cos 1jI,dx/dt = -aw(,) sin 1jI, (2,3)
where w(,) is the "normal frequency" of the system defined by w(,) = [k(,)/m(,)]1!2,IjI = w(,)t + e, and a and e are arbitrary constants (in this limiting case when, is consideredconstant and e = 0).
Now with a and e considered as new unknown functions of time t and with, = et, theequations for amplitude and phase can be written as [10]
da e
{d[m(,)W(,)]. 2. ..
}-
d = - ( ) a d sm IjI+ f("a cos 1jI,-awsmljl)smljl ,t m(,)w, ,de ~ d[m(r)W(')] . 1 .
}d- = - d smljlcosljl+ -f("acosljl,-awsmljl)cosljl .t m(,)w(,), a
Expanding the functions of IjIon the right-hand sides of equations (4) and (5) in ultra-spherical polynomials in the interval [0, 2n] and retaining the constant terms only [1, 2],gives
da e d[m(,)w(,)]
}dt = - 2m(,)w(,) a(l - C1) d, + 2F1("a, A) ,
de dljl e-
d= -
d - w(,) = -( )
F2("a, A),t t am(,)w,
(4)
(5)
(6)
(7)
where A corresponds to the set of polynomials used in the expansion, F1( ), Fi ) are thegeneralizedaverage valuesoff( ) sinljland f( ) cosljl,respectively,and
C1 = r(A + 1)J.i2n)/(n)A. (8)
Equations (6) and (7) can be integrated to obtain a(t) and ljI(t)for the first order approxi-mate solution given by equation (2) for every A > - 1/2. The Bogoliubov-Mitropolskyresults corresponding to equations (6) and (7) are [10, 11]
da e d[m(,)w(,)] 1 r21t . .
}dt = -2m(,)w(,) a d, +~Jo j("a,ljI)smljldljl,de e 1
1
21t
-d
= -( ) ( )
_2 f(" a, 1jI)cosljldljl.
t am,w, no
As reported in previous investigations [1, 2, 4, 5], for A = 1/2 the generalized averagedequations (6) and (7) reduced to equations (9) and (10), respectively.
(9)
(10)
2.1.2. Step response
The problem of step response of non-linear systems with slowly varying system para-meters can be written as
d
[dX
] (dX
)dt m(,) dt + k(,)x + ef x, dt = Pu(t),(11)

ON NON-LINEAR OSCILLATIONS 295
where u(t) is the Heaviside step function defined by
{Oift~O
}u(t) = .
1 ift > 0(12)
The system is assumed to be at rest initially: that is,
x = dx/dt = 0 at t = O. (13)
The solution of equation (11) can be assumed in the form [2]
x = aoCr) + a cos 1jJ, (14)
where IjJis defined as before and aoCr)is the "slowly varying mean amplitude" determinedby the real root of the following algebraic equation:
k(-r)ao + [;f(ao,O)- P = O. (15)
With, once again, a and IjJtaken as new unknown functions of time t, the equations foramplitude and phase are given by
_da = 1{
w d[m(-r)w(-r)] sinljJdt m(T)w(T) d-r
+ [;f(ao + a cosljJ, -aw sinljJ)+ aom(-r)w2(-r)- P } sin 1jJ,
dB = 1{
w d[m(-r)w(-r)] sin IjJdt am(-r)w(-r) d-r
+ [;f(ao + a cos 1jJ,- aw sin 1jJ)+ aom(-r)w2(-r)- p} cos 1jJ. (17)
By following the procedure outlined before, the approximate equations for amplitudeand phase are obtained:
(16)
da = [; d[m(-r)w(-r)]
}dt 2m(-r)w(-r)a(1 - C1) d-r + 2G1(ao'a, A) ,(18)
dB 1
dt = am(-r)w(-r)[aom(-r)w2(-r)- P]C3 + [;G2(ao'a, A)},(19)
where
C3 = r(A + 1) J).(n)/(n/2)A, (20)
C1 is given by equation (8) and G1( ), G2( ) are the generalized average values of f( )sin IjJand f( ) cos IjJin equations (16)and {17),respectively.
The Bogoliubov-Mitropolsky results can be obtained from equations (18) and (19) bysetting C1 and C3 to zero and replacing G1( ) and G2( ) by (1/2n)J~1tf(ao,a,ljJ)sinljJand(1/21t)J~1tf(ao'a, 1jJ)cos 1jJ,respectively. It is interesting to note, from equation (19), that, ingeneral, the frequency of oscillation explicitly depends on the magnitude of step P. However,for the Bogoliubov-Mitropolsky result C3 is zero and thus P does not appear explicitlyin the frequency equation.
2.2. MONOFREQUENCY OSCILLATIONS OF SYSTEMS OF MULTIPLE DEGREES OF FREEDOM
The equations of motion for free vibrations of a system with N degrees of freedom and

296 S. C. SINHA AND C. C. CHOU
slowly varying parameters can be expressed as
d
{
N
}
N
dt .2: mij(-r:)xi + ,I kJr)xi = 8/i1:, Xl' . . ., XN' Xl' . . . , XN' 8), j = 1,2,..., N,z= 1 ,= 1(21)
where Xi = dx/dt.The corresponding unperturbed system is given by
N N
I mJ1:)xi+ I kii1:)xi= 0, j = 1,2,..., N.i= 1 i= 1
(22)
This system is obtained by setting 8 = 0 in equation (21) and treating 1: as a constantparameter.
By using a similar approach as in the case of a single degree of freedom, it is possible toconstruct approximate solutions of equation (21) in the neighbourhood of the normal modevibrations of equation (22), given by
X:k) = </J~k)a COS(Wkt + Ok)' i, k = 1,2,.. . , N,
where Wk(k = 1, 2, . . . , N) are the normal frequencies determined by
det l-m..w2 + k..1
= o.ZJ ZJ
</J~k)(i, k = 1,2, . . . , N) are normal functions obtained from the system of following equa-tions:
(23)
(24)
N
I (-mijw~ + ki)</J:k)= 0, U,k = 1,2,..., N),i= 1
(25)
and have the orthogonality propertiesN N
I mij</J:k)</JY) = 0, I kij</J~k)</Jjl) = 0, (k -# 1).i.j=l i,j=l
(26)
a and Okare real constants in equation (23).Then with a and Oktaken as unknown functions of t, the first approximation equations
can be written as [10]
da = 8{a d[ml(1:)wl(1:)]sin2 t/J+ £ ~(1)(1:,a, t/J)</Jjl)(1:)sin t/J},dt ml(1:)wl(1:) d1: j=l
dt/J 8
{d[ml(1:)Wl(1:)]sin,l,cos,I,+!; j.(l)(1:,a,t/J)</J(l)(1:)Cost/J
},-wW- 0/ 0/ ~ J J(it - 1 ml(1:)w 1(1:) d1: a j= 1
(28)
(27)
where
~(1)(1:, a, t/J) = ..0[1:, </Jil)(1:)acos t/J,..., </J~)(1:)acos t/J,
- </Jil)(1:)awl (1:) sin t/J, . .., - </J~)(1:)awl(1:) sin t/J, 8], (29)
N
ml(1:)= I mii1:)</J:l)(1:)</Jjl)(1:),t/J= Wl(1:)t+ °1, (30,31)i '= 1
Averaging the right-ha~d sides of equations (27)and (28) through an expansion in ultra-spherical polynomials leads to
da
dt~
{a(1 C )d[ml(1:)wl(1:)]
}2ml(1:)wl(1:) - 1 d1: + 2Hl(1:,a,2) ,(32)

ON NON-LINEAR OSCILLATIONS 297
dl/; 3-d = WlC) - () (\H ir, a, A),t ml T Wl T
(33)
where H 1( ) and H 2( ) are, respectively, the generalized average values ofN N
" P1)(T, a, l/;)qP)(T)sin I/;and" f(l)(T, a, l/;)qP)(T)cos 1/;.L.,J J L,J Jj=l j=l
Equations (32) and (33) are the approximate amplitude and phase equations of oscillationsclose to the normal oscillations with frequency Wl(T).
As discussed earlier, the Bogoliubov-Mitropolsky results, similar to equations (9) and(10),can easily be obtained from equations (32)and (33).A similar analysis can be made foroscillations close to the normal oscillations with any other frequency Wk(T).It is to be notedthat all such problems reduce in practice to a single degree of freedom problem with the
"modified mass" ml (T)and the non-linear function of !pJ( ) given by equations (30) and(29), respectively. The approach is illustrated through the following example.
3. ILLUSTRATIVE EXAMPLE
Consider the oscillations of two identical simple pendulums, each of mass m and variablelength I(r).These pendulums are statically coupled by a linear spring of stiffness k attachedto their centers of mass. If one of the pendulums oscillates in a viscous medium, then theequations of motion can easily be obtained as
d I dll ]d .
dtlmI2(T)d/ + 2ndt[I(T)IIIJ+ kF(T)[111- 112J+ mgl(T) sm 'll = 0,d
[ dll ].
dt ml2er)dt2 + kI2(T)[112- II1J+ mgl(T)sm '12= 0,
(34)
(35)
where 'll and '12are the angular displacements, 2n is the friction coefficient andg is the accel-eration due to gravity.
For small motions, sin ''It and sin '1zcan be replaced by the first two terms of their powerseries expansions and equations (34) and (35) then can be written as
d
[ dll ] mgl(T) dll dl(T)dt mI2(T)~ + mgl(T)111+ kI2(T)[111- 112J= --y- II~- 2nl(T)~ - 2end{ 'll'
(36)
d
[ dl1
Jmgl(T)
dt mI2(T)d: + mgl(T)112+ kI2(T)[112- I11J = ~'I~' (37)
Assuming the amplitude and damping to be small, one can write 'll = Jf. Xl' '12 = )8 X2
and n = enl' and transform equations (36)and (37)as
:t [mI2(T) d;/] + mgl(T)xl + kI2(T)[Xl - X2J = 3!1(T,xl' X2' Xl' X2' 3),
d r 2 )dX2 ] 2
[ J. .
dt Lml (T (it + mgl(T)x2 + ki (T) X2 - Xl = 3!2(T,Xl' X2' Xl' X2' 3),
(38)
(39)
where
- mgl(T) 3 dXl. dl(r)!1() - ~Xl - 2nll(T)d"t - 2enl~XI' !2( ) = mgl(T) 36 X2' (40,41)

298 s. C. SINHA AND C. C. CHOU
Equations (38) and (39) represent a special case of the general set of equations given byequation (21). The equations of the unperturbed system similar to equation (22) are
m1Z(T)x\+ [mg1(T)+ k1Z(T)]X1- k1Z(T)xz= 0,
m1Z(T)xz+ [mg1(T)+ kZZ(T)]Xz- k1Z(T)X1 = O.
(42)
(43)
The two "normal frequencies" for this system can easily be obtained from equation (24) as
o)~(T) = g/l(T) and o)~(T) = g/l(T) + 2k/m. (44)
To investigate small oscillations close to the oscillations with "normal frequency" 0)1'one needs to find the normal functions 1>i1)and 1>~1).From equation (25) the normal func-tions can be taken as
1>i1) = 1>~1) = 1. (45)
With the results of equation (45)and the specificformsoff1( ) andfz( ) givenby equations(40)and (41),equations (27}-(29)yield
I ~(l)(T, a, 1/I)1>?)(T)sin 1/1= a3 mg~(T) (i sin 21/1 + t sin 41/1)j = 1
+ an11(T)0)1(T)(1 - cos 21/1)- alm1 d1(T)sin 21/1,dTz mg1(T)
I ~(l)(T, a, 1/I)1»l)(T)cos 1/1= a3 ~ (t + t cos 21/1 + t cos 41/1)j = 1
(46)
. d1(T)+ an11(T)0)1(T)sm21/1 - a3n1 ~(1 + cos21/1).
m1(T)can be obtained from equations (30) and (45) as
m1(T) = 2mZZ(T). (48)
Now one can write the amplitude and the phase equations from equations (32) and (33) as
da
{n1 /(T)
}dt = -w(1 - C1) 2m1(T)+ 41(T) , (49)
dl/l
{
3az
(3 C1 Cz
)}z
dt = O)l(T) 1 - 6 "8 + 2 + 8 + 0(3 ), (50)
(47)
where
1'(T)= d1(T)/dt, O)l(T)= )g/l(T), Cz = r(Je + 1)J,/4n)/(2n)A
and C1 is given by equation (8).Integrating equation (49) with the initial value a = ao at t = 0 gives
[l(O)
]
f(l-Cl)
[-3(1 - C)n it dt
]a = a - exp 1 1 -.
0 l(T) 2m ol(T)
(51)
(52)
Substituting this value of a in equation (50) and integrating gives
,I, = (t ( ) [1 - ~(l. C1 Cz){Z
.[1(0)
J3(1 -Cd
(- 3(1 - C1)n1 rdt)}]
d'I' Jo 0)1T 6 8 + 2 + 8 ao l(T) exp m Jo l(T) t.
(53)
If 1(T)varies according to the linear relation 1(T) = 10+ 11T,where 10is the length at t = 0,

ON NON-LINEAR OSCILLATIONS 299
equations (52) and (53) yield the following expressions for amplitude and phase:
- ( 10 )!i + (nt/Zm/j)](1 - c,)
a - ao 1 1 '0 + IT
(54)
ft
( 9 )I/Z
{
8
(C ~ ( 1
)If + (nl/ml,)](1 - C,)
}ijJ = 1 - - i + ~ + Z a~ 0 dt. (55)
.' 0 10+ IIT 6 2 8 10+ liT
For A = 1/2, CI and Cz are zero and the Bogoliubov-Mitropolsky results [9,10] canbe obtained from above equations as
a = ao( 10 )!i + (n1fZml,)], t/J= rt (9
)I/Z
{I - ea~
(10
)!t + (nl/ml')]
}dt.
10 + liT Jo 10 + liT 16 10 + liT
(56,57)
It should be noted that evaluation of t/J requires the substitution T = 8t in equations (55)and (57).
If leT)is taken as a constant (= 1),the amplitude and the phase equations for pendulumswith constant length can readily be obtained from equations (52) and (53) as
a = ao exp[ -~(1 - CI)t],
t/J= wit + {8,)a~/12~(1- CI)}{exp[ -2~(1 - CI)t] - I} + t/Jo'
(58)
(59)
where
,) = (i + ~CI + tcz)' WI = (g/l)I/Z, ~ = (wl/2m1)
and t/J0 is the initial phase. The corresponding results of Mitropolsky [10] can be obtainedby setting CI and Cz equal to zero in equations (58)and (59).A similar analysis can be madefor oscillations close to the second normal mode when the systemsvibrates with Wz =g/l(T) + 2k/m.
For a numerical comparison ofresults, consider a single degree of freedom system whichcan be obtained from equation (38)with k == O.Thus
d
[dX
] [mgl(T) dx dl(T) ]dt mlZ(T)dt + mgl(T)x= 8 ~X3 - 2nll(T)dt - 2wI dtX . (60)
By following the procedure described in section 2.1 and taking leT)= 10+ liT, the amplitudeand the phase equations can be shown to be
- [ 10 ]B- + (nl/ml,)](1 - c,)
a - ao 1 1 '0 + IT
(61)
- it
f9
J..
I/Z
{~ (1 CI Cz )Z
f10
J
,t + (Znllmll)](1 - Cl)
}t/J - 1 1 1 - 6 8 + 2+
8 ao 1 1 dt. (62)0 - 0 + IT - 0 + IT
As one would expect, these equations are similar to equations (54) and (55) except for thedifference in the damping factor appearing in the amplitude equations.
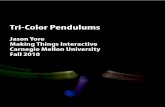
The approximate response obtained from equations (61) and (62) are compared withRunge-Kutta numerical solutions of equation (60) in Figures 1 and 2 for the followingtypical values of parameters: 10= 15.24 X lO-z m, 1111= 15.24 x 10-2 mis, nl/m =0,05 mis, 8 = 0'1, 9 = 9.81 m/s2, x(O) = 0,75 rad and x(O) = O.
Figure 1 shows the response of a pendulum with linearly decreasing length (II < 0),while in Figure 2, the response for a pendulum with linearly increasing length (II > 0)is shown. It is observed that the ultraspherical polynomials yield good approximations to

300
~ 0'50"E'"E'"u0a.'"i:S 0'00
-0'50
S. C. SINHA AND C. C. CHOU
,.50
1.00
\ +
\+\
+ ;+V
I~1+
\ ', J\J
-1'000'20 0.40 0'800.60 ,.00 1.20 1.40 "60
Figure 1. Time-displacement curve for a pendulum with I{,) = 10- 11" -, Numerical results; ii, A = 0,5;+, A= 10.0.
the numerical solutions. In particular, the response with A = 1/2 (Legendre polynomials)is indistinguishable from the numerical solutions. However, as the solution depends on A,the present approach can yield more accurate results than the Bogoliubov-Mitropolskymethod for systems with large non-linearity. Since C1 is always less than unity [11],for n1 > 0, II < 0 and Indml11< 3/4, the amplitude increases as indicated by equation(61) and Figure 1. However, if n1 and II are positive, the amplitude of vibration decreasesas shown in Figure 2. Similar results can be obtained for the frequency of vibration.
~ 0'50"E'"E'"u0a.'"i:S 0.00
-0'50
-1,00
"50
'-00
~
\+
\ /<6-\ I\ I~
+\ J+~\ ;+
'4..6+fl
0'20 0.40 0.60 0-80 1-00 1-20 1-40 1'60
Figure 2. Time-displacement curve for a pendulum with I{,) = 10+11" -, Numerical results; ii, A= 0,5;+, A = 10.0.

ON NON-LINEAR OSCILLA nONS 301
4. RESULTS AND DISCUSSIONS
The generalized averaging technique, based on ultraspherical polynomial expansion,has been extended to study the response of non-linear systems with slowly varying systemparameters. Problems of free oscillation of systems with a single degree of freedom as wellas monofrequency oscillations of systems with multiple degrees of freedom are considered.The Bogliubov-Mitropolsky results can be obtained as a special case ifthe averaging processis carried out by the use of Legendre polynomials. Approximate solutions for the step re-sponse of non-linear systems with slowly varying parameters have also been presented.The analysis includes results which can be obtained by the Bogoliubov-Mitropolskytechnique. The approach presented here can be extended to study the step response ofsystems with multiple degrees of freedom, along the lines suggested by Rangacharyulu,et al. [6J.
Also, as suggested by Anderson [4, 5J, one could include the linear damping term in theunperturbed equations of motion to obtain more accurate results when viscous or quasi-linear damping forces are present in the system.
ACKNOWLEDGMENT
Authors would like to thank one of the referees whose valuable suggestions led to the finalversion of the manuscript.
REFERENCES
1. S. C. SINHAand P. SRINIVASAN1971 .Tournaiof Sound and Vibration 18, 55-60. Application ofultraspherical polynomials to non-linear autonomous systems.
2. S. C. SINHAand P. SRINIVASAN1972 .Tournaiof Soundand Vibration22.211-219.Anapproximateanalysis of non-linear, non-conservative systems subjected to step function excitation.
3. N. KRYLOVand N. BOGOLIUBOV1947 Introduction to Non-linear Mechanics. Princeton, NewJersey: Princeton University Press. See pp. 8-14.
4. G. L. ANDERSON1973 .Tournaiof Sound and Vibration 29, 463-474. An approximate analysis ofnon-linear, non-conservative systems using orthogonal polynomials.
5. G. L. ANDERSON1974 .Tournai of Sound and Vibration 32, 101-108. Application of ultras ph erica 1polynomials to non-linear, non-conservative systems subjected to step function excitation.
6. M. A. V. RANGACHARYULU,P. SRINIVASANand B. V. DASARATHY1974 .Tournaiof Sound andVibration 37, 359-366. Approximate analysis of coupled non-linear, non-conservative systemssubjected to step-function excitation.
7. H. R. SRIRANGARAJANand P. SRINIVASAN1973.Tournaiof Soundand Vibration 29, 215-226.The transient response of certain third-order non-linear systems.
8. H. R. SRIRANGARAJANand P. SRINIVASAN1976.Tournaiof Soundand Vibration 44, 369-377.The pulse response of non-linear systems.
9. N. N. BOGOLIUBOVand Yu. A. MITROPOLSKY1961 Asymptotic Methods in the Theory of Non-linear Oscillations. New York: Gordon and Breach, Science Publishers, Delhi: Hindustan Pub-lishing Corporation (Translated from Russian).
10. Yu. A. MITROPOLSKY1965 Problems of the Asymptotic Theory of Nonstationary Vibrations.Jerusalem: Israel Program for Scientific Translations, New York: Daniel Darey and Co., Inc.(Translated from Russian).
11. E. JAHNKEand F. EMDE1945 Tables of Functions. New York: Dover Publications. See pp. 128-190.
F