ON - Emory University
21
Transcript of ON - Emory University

ON THE EIGENVALUES OF A CLASSOF SADDLE POINT MATRICES�MICHELE BENZIy AND VALERIA SIMONCINIzAbstra t. We study spe tral properties of a lass of blo k 2�2 matri es that arise in the solutionof saddle point problems. These matri es are obtained by a sign hange in the se ond blo k equationof the symmetri saddle point linear system. We give onditions for having a (positive) real spe trumand for ensuring diagonalizability of the matrix. In parti ular, we show that these properties hold forthe dis rete Stokes operator, and we dis uss the impli ations of our hara terization for augmentedLagrangian formulations, for Krylov subspa e solvers and for ertain types of pre onditioners.Key words. eigenvalues, eigenve tors, saddle point matri es, positive stable matri es, Stokesproblem, Krylov subspa e methods, pre onditioning.AMS subje t lassi� ations. Primary 65F10, 65N22, 65F50. Se ondary 76D07.1. Introdu tion. In this paper we investigate spe tral properties of blo k 2� 2matri es of the form M� = � A BT�B C � (1.1)where A 2 Rn�n is symmetri positive de�nite (SPD), B 2 Rm�n with m � n, andC 2 Rm�m is symmetri positive semide�nite (possibly C = O). If we de�neM+ = � A BTB �C � and J = � In OO �Im � ;we have M� = JM+. Note that M+ is symmetri , whereas M� is nonsymmetri ;however, M�J = JMT� ; (1.2)i.e., M� is J-symmetri . Consider the blo k fa torization� A BTB �C � = � In OBA�1 Im � � A OO �S � � In A�1BTO Im � ;where S = C + BA�1BT is the S hur omplement of A in M�. It follows that ifker(C) \ ker(BT ) = f0g (i.e., if C is positive de�nite on ker(BT )), the matrix M+is inde�nite with exa tly n positive and m negative eigenvalues. In ontrast, thenonsymmetri matrix M� is positive semide�nite, i.e., the symmetri part of M�,12(M� +MT�) = � A OO C � ;�Revision dated 5 De ember 2005.yDepartment of Mathemati s and Computer S ien e, Emory University, Atlanta, Georgia 30322,USA (benzi�math s.emory.edu). The work of this author was supported in part by the NationalS ien e Foundation grant DMS-0207599.zDipartimento di Matemati a, Universit�a di Bologna, Piazza di Porta S. Donato, 5, I-40127Bologna, Italy; CIRSA, Ravenna and IMATI-CNR, Pavia, Italy (valeria�dm.unibo.it).1

2 M. Benzi and V. Simon iniis positive semide�nite. Together with the assumption that ker(C) \ ker(BT ) = f0g,this in turn implies that all the eigenvalues ofM� have positive real part [6, 28℄; thus,M� is a positive stable matrix.Matri es of the form (1.1) frequently o ur in the solution of saddle point prob-lems; these in lude e.g. mixed �nite element formulations of ellipti PDEs, uiddynami s and onstrained optimization problems, and so forth; see [7℄ for an exten-sive survey. We will also onsider the ase of A symmetri positive semide�nite, whi harises in many appli ations. Although the symmetri formM+ is generally preferred,there are situations where it is of interest to onsider the nonsymmetri form M�instead. One su h reason is that the nonsymmetri form permits the use of spe ialpre onditioners whi h are not natural for the symmetri form; see [5, 6℄. Anotherreason, whi h is the main motivation for our present work, is that in some ases theeigenvalues of M� turn out to be all real (and, of ourse, positive). When M� is di-agonalizable, this implies the existen e of a nonstandard inner produ t on Rn+m withrespe t to whi h M� is symmetri positive de�nite. As we shall see, these propertiesmay always be obtained, at least in prin iple, using appropriate s alings or by meansof augmented Lagrangian te hniques. Our theory also provides a general frameworkfor the analysis of ertain pre onditioners for saddle point problems.2. Analysis of the eigenvalues. We onsider the problem� A BT�B C � � uv � = � � uv � ; or M�q = �q : (2.1)We make the general assumption that A and C are symmetri . Later we will alsorequire that A be positive de�nite and C be positive semide�nite. The spe tralproperties of the problem above have been studied in [12℄ for A = �In (� > 0) andC = O and in [28℄ for C = O. The results given here are more general and omplete;for instan e, our onditions for the reality of the spe trum do not appear to havebeen given before. In the sequel we will onsider the following two blo k equations,equivalent to (2.1), Au+BT v = �u (2.2)�Bu+ Cv = �v: (2.3)Note that the problem above an be equivalently written as� A BTB �C �� uv � = � � In OO �Im � � uv � ; or M+q = �Jq ; (2.4)a generalized eigenproblem for the symmetri pen il (M+; J). In the following, wewill say that two ve tors x; y 2 C n+m are J-orthogonal if x�Jy = 0, i.e., if they areorthogonal with respe t to the inde�nite inner produ t asso iated with J . Here andelsewhere in the paper, x� denotes the onjugate transpose of ve tor x.2.1. General results on the eigenvalues of M�. In this se tion we give somegeneral onditions for the reality of the spe trum of M�, and on the number of non-real eigenvalues, if they exist. We �rst re all a key result for our analysis. This resultis also important for an understanding of the eigenve tor stru ture of M�. Re allthat an eigenspa e of a matrix is simple if its eigenvalues are, ounting multipli ities,disjoint from the other eigenvalues of the matrix; see [31, p. 244℄.

Eigenvalues of Saddle Point Matri es 3Theorem 2.1. ([17, Thm. 2.5℄) Let �; � be eigenvalues of M� su h that � 6= ��.Then the simple invariant subspa e asso iated with � is J-orthogonal to the simpleinvariant subspa e of �.The ondition � 6= �� is satis�ed by all omplex eigenvalues with non-zero imagi-nary parts that are not onjugate of ea h other. Assuming that M� is diagonalizable,the theorem above implies that the eigenve tors of real distin t eigenvalues and ofnon-real, non- onjugate eigenvalues are all mutually J-orthogonal. Note that thetheorem above does not require M� to be diagonalizable. However, here we makethe assumption that M� is diagonalizable, in order to simplify our analysis. Thisassumptions is usually satis�ed in the appli ations we are interested in. See also thedis ussion at the end of this subse tion.Denoting [u; v℄ an eigenve tor orresponding to an eigenvalue with non-zero imag-inary part, it an be easily seen that[u�; v�℄J � uv � = 0;that is, [u; v℄ is J-neutral (or J-isotropi ). This property is equivalent to the followingequality, whi h is important for our analysis:kuk = kvk: (2.5)(Here and throughout the paper, k � k denotes the Eu lidean norm for ve tors, andthe indu ed norm for matri es.) The diagonalizability assumption ensures that eigen-ve tors orresponding to multiple real eigenvalues are not J-neutral ( f. [17, p. 36℄).We start with a simple but signi� ant result, whi h follows from letting v = 0and then u = 0 in (2.2) and (2.3).Proposition 2.2. The matrix M� has at most n�m real eigenvalues satisfyingAu = �u, Bu = 0, with orresponding eigenve tors [u; 0℄. Furthermore, if BT isrank de� ient with null spa e of dimension r, then M� has at most r real eigenvaluessatisfying Cv = �v, BT v = 0, with orresponding eigenve tors [0; v℄.We an now state a result on the number of non-real eigenvalues.Proposition 2.3. Let A;C be symmetri . Then the matrix in (2.4) has at most2m eigenvalues with non-zero imaginary part, ounting onjugates.Proof. Let [ui; vi℄ i = 1; : : : ; k, ui 2 C n , vi 2 Cm , be the eigenve tors orrespond-ing to the eigenvalues �1; : : : ; �k with non-zero imaginary part, su h that �i 6= ��j(that is, no omplex onjugates are in luded). We re all that [ui; vi℄�J [uj ; vj ℄ = 0,8i; j = 1; : : : k. Let U = [u1; : : : ; uk℄, V = [v1; : : : ; vk℄. Then U�U � V �V = 0, that isU�U = V �V .We prove the assertion by ontradi tion. Assume that k > m. Let V = QvRbe a redu ed QR fa torization of V , with Qv 2 Cm�` , R 2 C `�k , ` � m. ThenV �V = R�R = U�U . Therefore, a redu ed QR fa torization of U is given by U = QuRwith some Qu 2 C n�` having orthonormal olumns. Hen e� UV � = � QuQv �R of rank ` � m < k:This is a ontradi tion, sin e the matrix [U ;V ℄ of eigenve tors is supposed to havefull rank equal to k. Therefore, it must be k � m, that is, there are at most m non- onjugate eigenvalues with non-zero imaginary part. The same proof an be arriedout with the remaining ( onjugate) eigenpairs, ompleting the proof.

4 M. Benzi and V. Simon iniThe previous result an also be obtained as a onsequen e of Corollary S5.2 in[16, p. 378℄. Our proof, however, is more self- ontained.The following proposition states ne essary and suÆ ient onditions for � to bean eigenvalue of M� in the pra ti ally important ase C = �Im; see, e.g., [3, p. 398℄.Its proof is straighthforward and an be omitted.Proposition 2.4. Assume A is symmetri , BT has full olumn rank, and C =�Im, with � 2 R.1. If � is an eigenvalue of M� with orresponding eigenve tor x = [u; v℄, thenu 2 ker(B), and � is an eigenvalue of A asso iated with u if and only if v = 0.2. Let (�; [u; v℄) be an eigenpair of M�, u 6= 0. Then � is an eigenvalue of Aasso iated with u if and only if � = �, in whi h ase it is ne essarily v = 0and u 2 ker(B).Next, we give our main result of this se tion: onditions for having only realeigenvalues in the ase when C = �Im, with � � 0.Proposition 2.5. Assume C = �Im with � � 0. Let (�; [u; v℄) be an eigenpairof M�. Then either � = �, or � is real if and only if�u�(A+ �In)uu�u �2 � 4u�(BTB + �A)uu�u : (2.6)Proof. If � = � > 0 then � is real. For C = �Im and � 6= �, we use the equationin (2.3) to get v = �Bu=(���), and substitute v into (2.2). After rearranging terms,we obtain �2u� �(A + �In)u+ (BTB + �A)u = 0.For u 6= 0, multiplying from the left by u� yields the following quadrati equationin � with real oeÆ ients,�2u�u� �u�(A+ �In)u+ u�(BTB + �A)u = 0:The two solutions are given by� = 12 u�(A+ �In)uu�u � 12s�u�(A+ �In)uu�u �2 � 4u�(BTB + �A)uu�u :Therefore, the two roots are real if and only if (2.6) holds.The ondition in Proposition 2.5 an be rewritten asu�(A+ �In)uu�u � 4 u�(BTB + �A)uu�(A+ �In)u :Sin e u�(A+ �In)u � u�Au, we haveu�(BTB + �A)uu�(A+ �In)u � u�(BTB + �A)uu�Au = q�(A� 12BTBA� 12 + �In)qq�q ; q = A 12u:Therefore, if �min(A+�In) � 4�max(BA�1BT+�Im), the ondition of Proposition 2.5is satis�ed, sin eu�(A+ �In)uu�u � �min(A+ �In) � 4�max(BA�1BT + �Im)� 4 q�(A� 12BTBA� 12 + �In)qq�q � 4 u�(BTB + �A)uu�(A+ �In)u :

Eigenvalues of Saddle Point Matri es 5We have thus proved the following result.Corollary 2.6. Assume the same notation as in Proposition 2.5 holds. If�min(A+ �In) � 4�max(BA�1BT + �Im), then all eigenvalues of M� are real.The reality ondition in the foregoing orollary an be restated as �min(A) �4�max(BA�1BT ) + 3�; for � = 0, it an also be expressed as �min(A) � 4 kSk.We also note that the ondition is suÆ ient, but not ne essary. For instan e, thematrix M� = 24 12 0 00 3 10 �1 0 35 (2.7)has real spe trum but does not satisfy the ondition.The results of Proposition 2.5 and of Corollary 2.6 an be generalized to matri esof the form M = � A BT1�B2 C � ; (2.8)under ertain onditions on B1, B2.Corollary 2.7. Let A = AT 2 Rn�n be positive de�nite, B1; B2 2 Rm�n besu h that BT1 B2 is symmetri , and let C = �Im, � � 0. Let (�; [u; v℄) be an eigenpairof M . Then � is real if and only if�u�(A+ �In)uu�u �2 � 4 u�(BT1 B2 + �A)uu�u :Moreover, all eigenvalues are real if �min(A+ �In) � 4�max(B2A�1BT1 + �Im).Proof. The proof pro eeds as for Proposition 2.3 and for Corollary 2.6. Note thatthe hypothesis that BT1 B2 is symmetri implies that the eigenvalues of A�1BT1 B2 arereal, and therefore (applying Theorem 1.3.20 in [19℄) the eigenvalues of B2A�1BT1 arealso real.This lass of matri es in ludes the ase where B1 = B and B2 = �B, with � > 0.Note that for � < 0 the matrix M would be the produ t of two symmetri matri es,one of whi h (diagonal) positive de�nite, so that all eigenvalues would be real. As aspe ial ase onsider the parametrized family of matri esM(�) = � A BT��B ��Im � :Assuming A is SPD, we an de�ne�� � 14 �min(A)�max(BA�1BT + �Im) :Then �� > 0, and M(�) has all the eigenvalues real for � 2 (�1; ��℄. Moreover, thesymmetri ally s aled matrix � A p�BT�p�B ��Im �

6 M. Benzi and V. Simon inihas all the eigenvalues positive and real for 0 < � � ��.Our suÆ ient ondition for the reality of the spe trum an be further extendedto generalized eigenvalue problems of the type� A BTB �C � � uv � = � � K OO �H �� uv � (2.9)where K;H are real symmetri and positive de�nite. This will be useful when wedis uss appli ations to pre onditioning.Remark 2.8. For A semide�nite and singular, non-real eigenvalues should beexpe ted regardless of B (as long as B 6= O). For example, the matrixM� = 24 1 0 00 0 "0 �" 0 35has non-real eigenvalues for all " 6= 0. The situation may be di�erent if C is allowedto be nonzero. For instan e, the spe trum of the matrixM� = 24 1 0 00 0 "0 �" � 35is real for � � 2".Remark 2.9. When C = O, a purely real spe trum may also be obtained by the lassi al augmented Lagrangian approa h [13℄. In this approa h the original systemis repla ed by an equivalent one with oeÆ ient matrix� A+ �BTB BT�B O � ; (2.10)where � > 0 is a parameter. Here we assume that A is positive semide�nite, and Bhas full row rank with ker(A) \ ker(B) = f0g. Note that A + �BTB is symmetri positive de�nite for all � > 0. The ondition for the reality of the eigenvalues analways be satis�ed by taking � suÆ iently large. Indeed, the largest eigenvalue ofB(A+ �BTB)�1BT tends to zero for �!1, whilelim�!1�min(A+ �BTB) = minu2ker(B)nf0g uTAuuTu > 0 ;see [13, Prop. 2.3℄. The hoi e of an \optimal" value of � requires a deli ate balan inga t between the onditioning properties of the (1,1) blo k in (2.10) and the rate of onvergen e of iterative solvers applied to the whole system (2.10). We refer thereader to [13℄ for details; see also [18℄ for a re ent study.Remark 2.10. In [8℄, the authors show how to derive pre onditioned saddlepoint matri es with a positive real spe trum and identify a nonstandard inner produ trelative to whi h these pre onditioned matri es are self-adjoint and positive de�nite.Our results show that under ertain onditions, no pre onditioning is ne essary toobtain a positive real spe trum. Of ourse, pre onditioning is usually ne essary inpra ti e in order to a hieve rapid onvergen e of Krylov subspa e methods.

Eigenvalues of Saddle Point Matri es 7It may happen that the symmetri matrix A has multiple eigenvalues. Next, weshow that this property is partially inherited by the matrix M�.Proposition 2.11. Assume that B has full rank and that M� is diagonalizable.Let � be an eigenvalue of A with multipli ity k > m. If range(B) does not in ludean eigenve tor of A not asso iated with �, then M� has an eigenvalue � = � ofmultipli ity at most k�m with a omplete set of orthogonal eigenve tors. If range(B)in ludes an eigenve tor of A not asso iated with �, then the multipli ity of � = � maybe higher.Proof. Let A = [Q�; Q2℄diag(�Ik;)[Q�; Q2℄T be the eigenvalue de omposition ofA, with [Q�; Q2℄ orthogonal and ��I nonsingular. Let x = [u; v℄ be an eigenve torof M� satisfying Bu = 0; v = 0 and let Z be a matrix with orthonormal olumnsspanning the null spa e of B, so that u = Zd for some ve tor d. Then from (2.2) weobtain Au = �u with u = Zd. We have(�Q�QT� +Q2QT2 )u = �u(�(I �Q2QT2 ) +Q2QT2 )Zd = �ZdQ2(� �I)QT2 Zd = (�� �)ZdZTQ2(� �I)QT2 Zd = (�� �)d:The matrix ZTQ2( � �I)QT2 Z is singular, and its null spa e has dimension equalto dim(ker(QT2Z)) � n �m � (n � k) = k �m. Sin e the matrix is symmetri , the orresponding ve tors d an be taken to be orthogonal, so that u = Zd will also beorthogonal. If range(B) does not in lude an eigenve tor of A not asso iated with �,then QT2 Z has full (row) rank, so that dim(ker(QT2Z)) = k �m.The proof above shows that multiple eigenvalues equal to � may arise if there areeigenve tors of M� of the form [u; 0℄, with Bu = 0; f. Proposition 2.2. The result ofProposition 2.11 is a signi� ant generalization of Lemma 2.2 (ii) in [12℄.2.2. Bounds for the eigenvalues ofM�. In this se tion we derive some simplebounds for the eigenvalues of M�.Proposition 2.12. Assume A = AT is positive de�nite, C = CT is posi-tive semide�nite, and BT has full rank. Let (�; [u; v℄) be an eigenpair of (2.4) withk[u; v℄k = 1. Then1. If =(�) 6= 0 then kuk2 = 12 = kvk2 and<(�) = 12 �u�Auu�u + v�Cvv�v � ; (2.11)so that12(�min(A)+�min(C)) � <(�) � 12(�max(A)+�max(C)); j=(�)j � �max(B):2. If =(�) = 0 then � = u�Au+ v�Cvu�u+ v�v ; (2.12)so that either2minf�min(A); �min(C)g � � � maxf�max(A); �max(C)g ; (2.13)

8 M. Benzi and V. Simon ini( ase v 6= 0), or �min(A) � � � �max(A)( ase v = 0).The same result holds if BT is rank de� ient with C positive de�nite on ker(BT ).Proof. A straightforward appli ation of Bendixsons' Theorem [20, p. 69℄, showsthat for any eigenvalue � of M�, the following bounds on the real and imaginary partof � hold:minf�min(A); �min(C)g � <(�) � maxf�max(A); �max(C)g ; j=(�)j � �max(B):Note that these bounds hold for any A = AT , C = CT , and B. Consider now theequations in (2.2) and (2.3). We note that it annot be that u = 0, otherwise, sin eBT has full rank, the �rst equation would give v = 0, whi h annot be true. (If BT isrank de� ient, then u = 0 implies that � is a nonzero eigenvalue of C.) We an thusassume u 6= 0. For v = 0, Proposition 2.2 applies, therefore � 2 R.Let � = �1 + i�2, with �1; �2 2 R. Multiplying (2.4) from the left by (u�; v�), weobtain u�Au+ v�Cv � � = �u�BT v + v�Bu:The real part yields �1 = u�Au + v�Cv, whi h proves the result for the real partof the eigenvalue, sin e kuk2 + kvk2 = 1. In parti ular, for �2 6= 0, it also holdskuk2 = kvk2 = 12 .Remark 2.13. For C = O, omplex eigenvalues an be further bounded ( f. [28℄).The property kuk = kvk together with �Bu = �v, yieldsj�j = kBukkvk � kBk = �max(B):We note that when the eigenvalues are all real and positive, it be omes possibleto use the Chebys hev algorithm instead of a symmetri Krylov solver applied to M+or a nonsymmetri Krylov solver applied to M�. This may be advantageous on par-allel ar hite tures, sin e the Chebys hev algorithm does not require inner produ ts, a ommuni ation-intensive operation. In order to use the Chebys hev algorithm e�e -tively, estimates of the smallest and largest eigenvalues are needed: a � �min(M�),b � �max(M�) (with a > 0). Upper bounds are not diÆ ult to obtain, but lowerbounds may be more problemati . Proposition 2.12 may be useful to derive bounds;note, however, that when C = O the lower bound from part 2 of Proposition 2.12 isgenerally 0. A similar diÆ ulty arises in eigenvalues estimates for M+, see [25℄.3. Working with a de�nite inner produ t. In this se tion we dis uss on-ditions for the existen e of an inner produ t in Rn+m with respe t to whi h M� withC = O is symmetri positive de�nite and therefore, in parti ular, diagonalizable.We also dis uss the pra ti al advantages of introdu ing a proper inner produ t foranalyzing the onvergen e of Krylov subspa e linear system solvers with M�.Consider the symmetri matrixG = � A� I BTB I � :

Eigenvalues of Saddle Point Matri es 9It is immediate to verify that GM� = MT�G for any . The following result showsthat under ertain onditions G is positive de�nite, and therefore it de�nes the soughtafter inner produ t.Proposition 3.1. Let A be symmetri and positive de�nite. Let = 12�min(A).If �min(A) > 4�max(BA�1BT ), then G is positive de�nite and M� is diagonalizable.Proof. We prove the result by showing that under the given hypotheses, alleigenvalues of G are positive. Writing the eigenvalue problem Gz = �z blo kwise andusing zT = [xT ; yT ℄, we obtain(A� I)x+BT y = �x; Bx+ y = �y:If � = then � > 0. If � 6= from the se ond equation we obtain y = (� � )�1Bx.Note that it must be x 6= 0 for otherwise � = . Substituting into the �rst blo kequation and multiplying by xT we obtain the following quadrati equation in �:�2xTx� �xTAx + xTAx� 2xTx� xTBTBx = 0; (3.1)whose (real) roots are�� = 12 xTAxxTx � 12s�xTAxxTx � 2 �2 + 4xTBTBxxTx : (3.2)Clearly, �+ > 0, while�� > 0 , 12 xTAxxTx � 12s�xTAxxTx � 2 �2 + 4xTBTBxxTx > 0, �xTAxxTx �2 > �xTAxxTx � 2 �2 + 4xTBTBxxTx, xTAxxTx > 2 + xTBTBxxTx : (3.3)Dividing by xTAxxTx and setting (xTAxxTx )�1 xTBTBxxTx = xTBTBxxTAx = qTA� 12 BTBA� 12 qqT q , withq = A 12x, the ondition (3.3) above an be rewritten as > 2 xTxxTAx + qTA� 12BTBA� 12 qqT q : (3.4)We now set = 12�min(A). If �min(A) > 4�max(BA�1BT ), we have 2 xTxxTAx + qTA� 12BTBA� 12 qqT q � 14�min(A)2 1�min(A) + �max(BA�1BT )< 14�min(A) + 14�min(A) = 12�min(A) = :The ondition (3.4) is satis�ed, so that �� > 0 and all the eigenvalues of G are positive.It follows from GM� =MT�G with G symmetri positive de�nite thatG 12M�G� 12 = G� 12 (MT�G)G� 12 :Therefore M� is similar to a symmetri matrix and thus is diagonalizable.

10 M. Benzi and V. Simon iniWhen A = �I , the matrix G given above redu es to the one given in [12℄. Notethat the ondition �min(A) > 4�max(BA�1BT ) annot be relaxed, in general. Forexample, the matrix M� = � 2 1�1 0 �satis�es �min(A) = 4�max(BA�1BT ) and therefore has real positive eigenvalues (bothequal to 1). However, M� is not diagonalizable. We also stress that the ondition ofProposition 3.1 is suÆ ient but not ne essary; as an example, the matrix in (2.7) hasreal and positive eigenvalues, is diagonalizable, but it does not satisfy the ondition�min(A) > 4�max(BA�1BT ).Again, a diagonalizable matrix an always be obtained by using the augmentedLagrangian approa h with � > 0 suÆ iently large. In identally, we note that the ondition number of the matrix of eigenve tors of (2.10) tends to 1 as �!1. Indeed,the eigenve tors of (2.10) tend to those of a symmetri matrix as � ! 1, and thusbe ome orthogonal in the limit.Under the hypotheses of the previous proposition, we an estimate the onditionnumber of the positive de�nite matrixG in terms of the positive de�niteness ondition.Corollary 3.2. Let A be symmetri and positive de�nite, = 12�min(A) and�min(A) > 4�max(BA�1BT ), so that � := 12 � �max(BA�1BT ) > 0. Then,�(G) := �max(G)�min(G) � 12 �max(A)� �1 +p(1� �(A)�1)2 + 1� � �max(A)� (3.5)Proof. Let � > 0 be an eigenvalue of G and set �min = �min(A), �max = �max(A)for short. From (3.2) we obtain� � 12 xTAxxTx 0�1 +s�1� �min xTxxTAx�2 + 4xTBTBxxTAx xTxxTAx 1A� 12�max �1 +p(1� �(A)�1)2 + 1� :For the lower bound, using (3.1) and dividing by xTAx we obtain�2 xTxxTAx + = � + 2 xTxxTAx + xTBTBxxTAx�2 xTxxTAx + 12 +�12 � xTBTBxxTAx � = � + 2 xTxxTAx: (3.6)The right-hand side in (3.6) an be bounded from above as �+ 2 xTxxTAx � �+ 2=�min =�+1=4�min, while using � > 0 the left-hand side of (3.6) an be estimated from belowas �2 xTxxTAx + 12 + �12 � xTBTBxxTAx � � �2 xTxxTAx + 12 + � � 12 + �. Colle ting the twoestimates for the equality above and re alling that 1=4�min = 1=2 yields12 + � � � + 14�min; or � � �:This result provides the lower bound for �, from whi h the �nal result follows. Theapproximation in (3.5) holds for �(A) large.

Eigenvalues of Saddle Point Matri es 11Let us now assume that the onditions of Proposition 3.1 are satis�ed so thatG is SPD and M� is diagonalizable with real, positive eigenvalues. Let �; X be theeigenvalue and eigenve tor matri es of M�, respe tively. Then we haveM�X = X� , GM�X = GX� , MT�GX = GX�:Sin e G is SPD and MT�G is symmetri , with � diagonal and positive, the olumnsof X are G-orthogonal, that is it holds XTGX = D with D diagonal and positivede�nite. In parti ular, we have X�T = GXD�1.We want to hara terize the role of G in the onvergen e of Krylov subspa esolvers applied to linear systems of type M�z = b. We start by observing thatG 12XD�1XTG 12 = In, so that, for any ve tor w 2 Rn+m we havekD 12X�1wk = kD� 12XTGwk = k(D� 12XTG 12 )G 12wk = kG 12wk = kwkG: (3.7)Let rm be the residual obtained by a Krylov subspa e method in Km(M�; r0), withr0 = b � M�z0 and z0 an initial approximation. Then rm = p(M�)r0 for somepolynomial p of degree not greater than m. Sin e M� is diagonalizable, we haverm = Xp(�)X�1r0, or, equivalently,X�1rm = p(�)X�1r0 , D 12X�1rm = p(�)D 12X�1r0;with kD 12X�1rmk � kp(�)k kD 12X�1r0k. Using (3.7) we obtainkrmkG � kp(�)k kr0kG from whi h krmk � �(G) 12 kp(�)k kr0k: (3.8)Therefore, the onvergen e rate of the onsidered method an be ompletely analyzedeither in terms of the G-inner produ t, or in terms of the onditioning of an appro-priate SPD matrix G, together with the behavior of the polynomial p on the set ofthe (real) eigenvalues of M�; we refer to [1℄ for more details on the relation betweenG-inner produ t and Eu lidean inner produ t.The se ond bound in (3.8) should be ompared with the lassi al bound krmk �kXk kX�1kkp(�)k kr0k for general diagonalizableM� (see, e.g., [26℄), where the on-ditioning of the eigenve tor matrix and its estimate play a ru ial role in the sharpnessof the onvergen e bound. Thanks to (3.7) we have been able to repla e kXk kX�1kwith a more insightful quantity, the onditioning of G. If a good estimate of �min(A)is available, then the Conjugate Gradient method may be employed for solving sys-tems with M� by using the inner produ t de�ned by G (see, e.g., [2℄). Note thatmultipli ations with G do not entail signi� ant extra omputational ost, sin e G anbe written as G =M+� J (or G = J(M�� I)), and produ ts with M+ or M� arealready available during the iteration.In the absen e of a de�nite inner produ t, Theorem 2.1 still ensures that theeigenve tor matrix is J-orthogonal, that isX�JX = S; (3.9)where S is blo k diagonal with 2 � 2 blo ks. More pre isely, the 2 � 2 blo ks thatare not diagonal are asso iated with omplex onjugate eigenpairs (�; x) and (��; �x),for whi h it holds x�Jx = 0 and �x�Jx 6= 0. For real eigenvalues, the orrespondingportion of S is diagonal with nonzero diagonal elements. This is the ase also formultiple real eigenvalues, sin e we assume that M� is diagonalizable [17, p. 36℄.

12 M. Benzi and V. Simon iniSetting x = [u; v℄, kxk = 1, for real eigenvalues we de�ne the quantitysr := x�Jx = kuk2 � kvk2 2 R:If � is a non-real eigenvalue, then kuk = kvk, and we de�nes := �x�Jx = �u�u� �v�v 2 C :Therefore, the matrix S has the following stru ture,S = 2666664 S1(�1) S2(�2) . . . sr(�n+m�1) sr(�n+m) 3777775 ; Si(�i) = � 0 �s (�i)s (�i) 0 � ;where at most m diagonal blo ks S1; : : : ; Sm are asso iated with omplex eigenvalues( f. Proposition 2.3). Using (3.9), we have X�1 = S�1X�J , therefore the onditionnumber of X an be written askXk kX�1k = kXk kS�1X�Jk � kXk2kS�1k:Clearly, a possible ill- onditioning of X depends on kS�1k, but may also depend onthe dimension of the problem with kXk. Our (somewhat limited) numeri al experi-en e seemed to indi ate that the problem dimension did not play a signi� ant role.Nonetheless, a omplete spe tral analysis in the presen e of nonreal eigenvalues re-mains to be done. Finally, a short-term re urren e method su h as simpli�ed QMRmay be exploited by using either the J-symmetry or the G-symmetry of matrix M�[14℄.4. An example: the Stokes problem. In this se tion we use saddle pointsystems arising from the lassi al Stokes problem to illustrate our theory. Let � Rd(d = 2; 3) be bounded and have a suÆ iently smooth boundary �. A fundamentalproblem in uid me hani s is the so- alled generalized Stokes problem [15, 32℄:�u� ��u+r p = f in (4.1)r � u = 0 in (4.2)Bu = g on � : (4.3)Here f is a given external for e �eld (like gravity), u denotes the velo ity ve tor�eld, p is the pressure s alar �eld, and B represents some type of boundary operator(e.g., a tra e operator for Diri hlet boundary onditions). The parameter � is zerofor the steady-state Stokes problem, and proportional to 1=�t (where �t is the timestep) in the unsteady ase when the time derivative ut is treated by impli it s hemes,su h as ba kward Euler. The onstant � > 0 represents vis osity; if � = 0, we analways res ale the problem and assume that � = 1.Div-stable dis retizations of the Stokes system (su h as MAC, or mixed �niteelement methods satisfying the LBB ondition [10℄) lead to linear systems of equationsof the form � A BTB O � � up � = � f0 � ; or M+x = b : (4.4)Here A is positive de�nite and is a dire t sum of dmatri es of the form F = �Mu+� L,whereMu is a (velo ity) mass matrix (or a s aled identity for �nite di�eren e s hemes

Eigenvalues of Saddle Point Matri es 13like MAC) and L represents a dis retization of the (negative) Lapla ian. Moreover, Bis a dis rete divergen e operator and BT a dis rete gradient. Unless some additional ondition is imposed on the pressure (e.g., R p dx = 0), BT is rank de� ient witha one-dimensional null spa e ker(BT ) = spanfeg, where e is the ve tor of all ones.For unstable dis retizations a stabilization term C is added, leading to a oeÆ ientmatrix of the form M+, with C positive semide�nite, C 6= O. Let us now onsiderthe asso iated nonsymmetri matrix M�. Numeri al experiments reveal that for anumber of spatial dis retizations of the generalized Stokes problem (under a varietyof boundary onditions), the eigenvalues of M� are all real (and, of ourse, positive),provided that the vis osity � is not too small. In parti ular, the eigenvalues are allreal when � = 0 and � = 1. Furthermore,M� is diagonalizable. Indeed, the matrix Gdes ribed in se tion 3 is SPD and therefore a onjugate gradient-type method (i.e., aKrylov subspa e method based on short re urren es) exists for this problem.1 To ourknowledge, su h properties of the spe trum of M� have not been expli itly observedor proved before. Some analysis has been given in [28℄, but neither the reality of theeigenvalues nor the diagonalizability property for the dis rete Stokes problem werenoted there.The fa t that M� is diagonalizable and has all the eigenvalues positive and real an be explained by applying the general results in se tions 2.1 and 3. Considerfor instan e the ase where = [0; 1℄ � [0; 1℄. Assuming zero Diri hlet boundary onditions, the smallest eigenvalue of the (negative) Lapla ian is given by �min =2�2 � 19:74. Therefore, for a suÆ iently �ne spatial dis retization, the smallesteigenvalue of the (1,1) blo k A in M� satis�es�min(A) � �+ 2��2 � �+ (19:74)�:For the stationary Stokes problem we an take � = 0, � = 1; for a div-stable dis- retization (like MAC) we have kSk � 1 and the reality ondition (with C = O) is learly satis�ed, sin e 19:74 > 4. For unstationary problems the reality ondition willbe satis�ed subje t to ertain restri tions on �, �. It is easy to see that for a �xed �,it is kSk � ��1 and the reality ondition, for h suÆ iently small, is �+2��2 � 4��1.(In pra ti e, we found that the eigenvalues are all real even for the oarsest meshes,e.g., for h = 0:25.) The ondition is ertainly satis�ed if � � p2=� � 0:45. Also,for a �xed � the eigenvalues will be all real provided that � is large enough, i.e., forsuÆ iently small time steps. Similar on lusions apply to the ase C = �Im, � > 0and in fa t also for more general forms of the stabilization term. Under the hypothe-ses of Proposition 3.1, the onvergen e of Krylov subspa e methods applied to thenonsymmetri formulation may be fully des ribed in terms of the spe trum of M�and of G; f. (3.8) and the dis ussion around it.We also performed a few numeri al experiments aimed at verifying the bound on�(G) given in Corollary 3.2, and we found that the upper bound and its approximationare indeed pretty good estimates of the spe tral ondition number of G. The resultsare reported in the table below.1We emphasize that this possibility is more theoreti al than pra ti al, sin e it is not lear atpresent how to derive pre onditioners that are self-adjoint and positive de�nite with respe t to theG-inner produ t.

14 M. Benzi and V. Simon inigrid �(G) Bound Estimate GMRES(M�) MINRES(M+)size in (3.5) in (3.5) # its # its8 � 8 91 193 161 65 6516 � 16 337 703 584 148 14932 � 32 1291 2667 2211 352 39164 � 64 5040 10364 8587 783 852For the sake of ompleteness, in the table we also report the number of GMRESand MINRES iterations to solve with M� and M+, respe tively, for a �nal residualtoleran e of 10�6. In pra ti e, these iterations would be used with pre onditioning.Sin e we are only interested here in he king the goodness of our estimates, we donot onsider pre onditioning. The asymptoti rate of onvergen e of MINRES whenapplied to the onsidered Stokes problem with M+ is known to be 1 � h3=2 (see[35, formula (5.3)℄), where h is the mesh size and is a modest onstant. This is on�rmed by our experiments, that show a superlinear in rease in the number ofMINRES iterations. For the ase of M�, the number of iterations be omes lowerthan for MINRES when re�ning the grid. Using (3.8), we an see that the GMRESminimum residual polynomial p satis�eskp(�)k � 2�p�M � 1p�M + 1�m ;where �M = �max(M�)=�min(M�) > 1. Using (2.13), �M � �(A) = a2h�2, for somepositive onstant a, so that�p�M � 1p�M + 1� � p�(A)� 1p�(A) + 1! = a� ha+ h = 1� 2h1 + h:This last quantity represents the asymptoti rate of onvergen e for the 2-norm of theresidual in (3.8), sin e �(G)1=m ! 1 as m ! 1. Clearly, we do not advo ate usingGMRES withM� for pra ti al purposes, as sub-optimal but heaper methods shouldbe preferred; see the dis ussion in se tion 3. Nonetheless, the results above show thatfor �ne grids, working with M� may provide some advantages, sin e 1 � 2h=(1 + h)is smaller than 1 � h3=2 for 0 < h < 1. A more detailed polynomial approximationanalysis of M+ and M� for A = �In an be found in [11℄.5. Appli ations to pre onditioning. As already mentioned, the linear system(4.4) an be solved using Krylov subspa e methods for symmetri inde�nite problems,su h as MINRES or SYMMLQ [23℄. Pre onditioning, however, is mandatory for fast onvergen e. In the last several years, a number of pre onditioning te hniques havebeen developed for solving saddle point problems; see [7℄ for a survey. Among the mostpopular te hniques we mention blo k diagonal, blo k triangular, and inde�nite ( on-straint) pre onditioners. We further mention pre onditioners spe i� ally developedfor the nonsymmetri formulation� A BT�B C � � up � = � f�g � ; (5.1)see [5, 6, 28℄. In the remainder of this se tion we use our general framework to analyzespe tral properties of the pre onditioned matri es orresponding to various types ofpre onditioners.

Eigenvalues of Saddle Point Matri es 155.1. Blo k diagonal pre onditioning. Both MINRES and SYMMLQ an beused with pre onditioning, provided that the pre onditioner is symmetri positivede�nite. The pre onditioned matrix is then ongruent to the unpre onditioned one,and therefore it has the same number of positive and negative eigenvalues as the lattermatrix (Sylvester's Law of Inertia). Des riptions of SPD pre onditioners for saddlepoint problems an be found, for example, in [7, 10, 22, 24, 25℄. These pre onditionersare blo k diagonal matri es of the formP+ = " bA OO bS # ;where bA and bS are symmetri positive de�nite approximations to A and S = C +BA�1BT , respe tively. In the ase of the generalized Stokes problem, spe trallyequivalent approximations bA and bS are known that lead to asymptoti ally optimalpre onditioners, i.e., pre onditioners that result in rates of onvergen e independentof the dis retization parameter h; see, e.g., [9, 10, 21, 29℄.One an also onsider inde�nite blo k diagonal pre onditioners of the formP� = " bA OO �bS # ;in whi h ase the pre onditioned matrix may have nonreal eigenvalues. Pre ondition-ers of the form P� with bA = 1�2A (� > 0) and bS � S (a symmetri and positivede�nite approximation to S) have been studied in [12℄ for the ase C = O. If Ldenotes the Cholesky fa tor of A and Ls the Cholesky fa tor of bS, then symmetri allyapplying the pre onditioner P� and dividing through by � results in pre onditionedmatri es of the form " �In bBT� bB O # ;where bB = L�1s BL�T . The nonsymmetri matrix M� has all its eigenvalues real andpositive provided that �2 � 4�max(L�1s SL�Ts ) :We onsider two extreme ases. If Ls is the exa t Cholesky fa tor of S = BA�1BT ,a suÆ ient ondition for the eigenvalues to be all real and positive be omes simply� � 2. If, on the other hand, Ls = Im (that is, bS = Im), then we have that the ondition for real eigenvalues is �2 � 4�max(S). For div-stable dis retizations of theStokes problem (see se tion 4) we an assume �max(S) = 1 and therefore a suÆ ient ondition for a real positive spe trum is, again, � � 2. Also, � > 2 guarantees thatthe pre onditioned matrix is diagonalizable. These onditions are suÆ ient, but notne essary; in pra ti e, a real spe trum may o ur for smaller values of �. However, ourbound is quite sharp for Stokes: in [12℄, it was found that a real spe trum o urredfor � > 1:9862.It was shown in [12℄ that the hoi e of � has little e�e t on the onvergen e ofKrylov methods pre onditioned by blo k diagonal pre onditioners of the form P�. Inthe same paper it is shown that it is more eÆ ient to use MINRES with the positivede�nite pre onditioner P+ than a method like QMR or GMRES with the inde�nitepre onditioner P�.

16 M. Benzi and V. Simon ini5.2. Inexa t onstraint pre onditioning. Constraint pre onditioners are an-other important lass of pre onditioners for saddle point problems; see [7, se tion10.2℄ for a survey. In this ase MINRES or SYMMLQ should be repla ed by a Krylovmethod that an a ommodate symmetri inde�nite pre onditioning, like simpli�edQMR [14℄. In alternative, a nonsymmetri Krylov subspa e method like GMRES [27℄or Bi-CGSTAB [33℄ an always be used, but these algorithms do not exploit symmetryin the system or in the pre onditioner.Constraint pre onditioners usually take the form (for the ase C = O)PI = � bA BTB O � ;where bA is an approximation of A. This type of pre onditioner is parti ularly eÆ ientwhen A represents the dis retization of a zeroth order operator su h as the massmatrix. In this ase, simply taking bA = diag(A) yields an e�e tive approximation forthe (1,1) blo k. Here we assume the problem has been s aled so that diag(A) = In,and we let bA = In. We write the inexa t onstraint pre onditioner asPI = � In OB Im � � In OO �H �� In BTO Im � ; H � BBT ;and H symmetri and positive de�nite. (ForH = BBT we obtain the exa t onstraintpre onditioner, whi h is often too expensive to be pra ti al.) Then the eigenvalueproblem � A BTB O �� xy � = �PI � xy � an be written as� In O�B Im �� A BTB O �� In �BTO Im � � uv � = � � In OO �H �� uv � ;where � uv � = � In BTO Im �� xy �. Expli itly omputing the left-hand side matrixyields � A (In � A)BTB(In �A) �B(2In �A)BT �� uv � = � � In OO �H � � uv � ; (5.2)a generalized eigenproblem of the form (2.9) if B(2In�A)BT is a positive semide�nitematrix. Note that this last ondition an be ful�lled by s aling A so that all itseigenvalues are not larger than 2. Next, we employ the results of Proposition 2.12to obtain bounds for the eigenvalues of the pre onditioned matrix P�1I M+. To thebest of our knowledge, these appear to be the �rst quantitative spe tral bounds forP�1I M+, when PI is an inexa t onstraint pre onditioner, namely when H 6= BBT .Corollary 5.1. Let � be an eigenvalue of the pen il (M+; PI ) and let H = RTRbe the Cholesky fa torization of H. Assume that the matrix B(2In�A)BT is positivesemide�nite, and let S = R�TB(2In �A)BTR�1. Then1. If =(�) 6= 0, then j=(�)j � k(In �A)BR�1k;12(�min(A) + �min(S)) � <(�) � 12(�max(A) + �max(S))

Eigenvalues of Saddle Point Matri es 17
0 0.5 1 1.5 2 2.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
real part of eigenvalues
ima
gin
ary
pa
rt o
f e
ige
nva
lue
s
a2
a1
bounding box of nonreal eigs
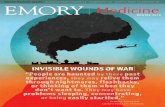
Fig. 5.1. Constraint pre onditioning. Exa t eigenvalues and bounds as in Corollary 5.1 for theele trostati problem. The bounds for real eigenvalues are a1 = 0:0042, a2 = 2:37.2. If =(�) = 0 then either2minf�min(A); �min(S)g � � � maxf�max(A); �max(S)gfor v 6= 0, or �min(A) � � � �max(A) for v = 0.Proof. The proof immediately follows from Proposition 2.12 applied to the pen ilin (5.2).We show the qualitative behavior of these bounds for a 2088�2088 linear systemstemming from mixed �nite element dis retization of the 2D ele trostati problem, forwhi h the inde�nite pre onditioner has been shown to be parti ularly e�e tive [24℄.We refer to [24℄ for a detailed des ription of the test problem. Here we approximateBBT of size 816 with RTR, where R is the upper triangular fa tor of the in ompleteCholesky fa torization of BBT omputed using the Matlab fun tion holin withdropping threshold 10�2. The exa t eigenvalues of P�1I M+ and the estimates providedby Corollary 5.1 are displayed in Figure 5.1. The large box shows the lo ation of thenonreal eigenvalues, whereas the left and right verti al bars next to the real axis,denoted by a1 and a2 respe tively, show the bounds for the real eigenvalues. Thebounds for the imaginary part is only twi e the largest imaginary part among the omplex eigenvalues. More pre isely, referring to the quantities in Corollary 5.1, wefound k(In � A)BR�1k � 1:22, while the eigenvalues of A and S are bounded as0:002 � �(A) � 2:38 and 0:13 � �(S) � 1:69.Simple algebrai manipulations of the eigenvalue problem in (5.2) provide moreinsightful information on the e�e t of using H to approximate BBT . Indeed, after

18 M. Benzi and V. Simon ini hanging sign in the se ond blo k row, we an write the left-hand matrix in (5.2) as� A (In �A)BT�B(In �A) B(2In �A)BT � = � (A� In) + In (In � A)BT�B(In �A) B(In � A)BT + BBT �= � (A� In) (In � A)BT�B(In �A) B(In �A)BT �+ � In OO BBT �= � InB � (A� In) hIn;�BT i+ � In OO BBT � :Note that in the last expression, the �rst matrix has rank at most n. By settingBBT = H + E, the eigenvalue problem (5.2) an be transformed into�� InB � (A� In) �In;�BT �+ � O OO E ��� uv � = (� � 1) � In OO H � � uv � :For H = BBT , that is E = O, we obtain the known result that 2m eigenvaluesare equal to 1, while the remaining (all real) eigenvalues satisfy Au = �u for u 6= 0with Bu = 0; see [7, 24℄ and referen es therein. For E 6= O, all eigenve tor blo ksu with Bu 6= 0 may give rise to nonreal eigenvalues, whose imaginary part an bebounded as in Corollary 5.1. In the eigenproblem above, we an also noti e that anonzero matrix E dramati ally a�e ts the null spa e of the low rank matrix, whi h orresponds to the eigenvalue � = 1 in the exa tly pre onditioned problem. This fa t an be appre iated in Figure 5.1, where most omplex eigenvalues are perturbationsof the unit eigenvalue, indu ed by the nonzero matrix E.5.3. HSS pre onditioning. Other pre onditioners have been proposed spe if-i ally for the nonsymmetri formulation (5.1); see [5, 6, 28℄. For example, the Hermi-tian / Skew-Hermitian splitting (HSS) pre onditioner [4, 6, 30℄ is de�ned as follows.Let I = In+m and let � > 0 be a real parameter. De�neP� = 12�(H + �I)(K + �I) ;whereH = 12(M� +MT�) = � A OO C � ; K = 12(M� �MT�) = � O BT�B O � :It was shown in [5℄ and, under more general assumptions, in [30℄ that all the eigen-values of the pre onditioned matrix P�1� M� are real for � suÆ iently small. In [30℄we observed (experimentally) that for the dis retized Stokes problem, the eigenvaluesof P�1� M� are a tually real for all values of � > 0. We are now in a position torigorously prove this fa t.Let (�; [u; v℄) be an eigenpair of the pre onditioned problem for C = O. It wasshown in [30℄, formula (2.4), that if � = ��=(2� �), then (�; [u; v℄) is an eigenpair ofthe problem � A+ 1�ABTB BT�B O � � uv � = � � uv � ; (5.3)and onversely. Hen e, the eigenvalues of P�1� M� are real if and only if the eigenvaluesof the matrixT = � A+ 1�ABTB BT�B O � = � AF BT�B O � ; F = In + 1�BTB

Eigenvalues of Saddle Point Matri es 19are real.Note that F is SPD and ommutes with BTB (and so do F�1 and F� 12 ). Arguingas in the proof of Proposition 2.5 (with � = 0 and A repla ed by AF ) we obtain theequation �2u� �AFu+BTBu = 0for the eigenvalue �. Performing the hange of variable w = Fu and multiplying onthe left by w� we obtain the quadrati equation�2w�F�1w � �w�Aw + w�BTBF�1w = 0 ;whi h has real oeÆ ients sin e F , A and BTBF�1 are all real symmetri . The rootswill be real provided that� w�Aww�F�1w�2 � 4w�BTBF�1ww�F�1w : (5.4)Letting z = F� 12w, we an rewrite (5.4) as z�F 12AF 12 zz�z !2 � 4z�BTBzz�z : (5.5)Condition (5.5) is equivalent toz�F 12AF 12 zz�z � 4 z�BTBzz�F 12AF 12 z = 4q�(A� 12F� 12BTBF� 12A� 12 )qq�q ; (5.6)where q = A 12F 12 z. We havez�F 12AF 12 zz�z � �min(F 12AF 12 ) = �min(AF ) = �min�A+ 1�ABTB�and q�(A� 12F� 12BTBF� 12A� 12 )qq�q � �max(A� 12F� 12BTBF� 12A� 12 )= �max(B(AF )�1BT ) = �max B�A+ 1�ABTB��1BT! :Observing that (for all � > 0) the eigenvalues of BA�1BT are bounded below bythose of B(A + 1�ABTB)�1BT and that the eigenvalues of A are bounded above bythose of A + 1�ABTB, it follows that T satis�es the ondition for the reality of theeigenvalues if M� does. In parti ular, for the Stokes problem dis ussed in se tion 4the pre onditioned matrix has only real eigenvalues, for all � > 0. We have thusproved the following result.Proposition 5.2. Assume the same notation as in Proposition 2.5 holds. If�min(A) � 4�max(BA�1BT ), then all eigenvalues of the HSS-pre onditioned matrixP�1� M� are real, for all � > 0.

20 M. Benzi and V. Simon iniBounds on the eigenvalues of P�1� M�, in luding lustering results, an be foundin [30℄. Finally, we remark that the matrix T above is symmetri with respe t to theinde�nite symmetri matrix � F OO �(I + 1�BBT ) � ;so that the theory of the previous se tions applies.6. Con lusions. In this paper we have investigated the spe tral properties ofa lass of nonsymmetri matri es M� with a spe ial 2 � 2 blo k stru ture. Su hmatri es arise in the numeri al solution of saddle point problems. We have obtainedsuÆ ient onditions for the eigenvalues of M� to be real and positive, and for thematri es to be diagonalizable. In many ases su h onditions an be satis�ed, atleast in prin iple, by appropriate s alings or by augmented Lagrangian te hniques.Positive real eigenvalues together with diagonalizability is equivalent to the existen eof a non-standard inner produ t relative to whi h M� is SPD and therefore thereexists a onjugate gradient method to solve linear systems involving M�. We havegiven an expli it expression for an SPD matrix G that generates su h inner produ t.Furthermore, we have derived eigenvalue bounds for M� and a lower bound on thespe tral ondition number of G whi h an be used to estimate the rate of onvergen eof the (non-standard) onjugate gradient iteration. Impli ations of the theory forvarious types of pre onditioners have been dis ussed. We have illustrated some of ourresults using matri es arising from the numeri al solution of the generalized Stokesproblem. An interesting open question is the derivation of G-symmetri , positivede�nite pre onditioners.A knowledgements. We gladly a knowledge helpful dis ussions with HowardElman, Eri de Sturler, Ri h Lehou q, and J�org Liesen. Thanks also to BeresfordParlett and two anonymous referees for their areful reading of the manus ript.REFERENCES[1℄ S. F. Ashby, M. J. Holst, T. A. Manteuffel, and P. E. Saylor, The role of the innerprodu t in stopping riteria for Conjugate Gradient iterations, BIT, 41 (2001), pp. 26{52.[2℄ S. F. Ashby, T. A. Manteuffel, and P. E. Saylor, A taxonomy for Conjugate Gradientmethods, SIAM J. Numer. Anal., 27 (1990), pp. 1542{1568.[3℄ O. Axelsson, Iterative Solution Methods, Cambridge University Press, Cambridge, 1994.[4℄ Z.-Z. Bai, G. H. Golub and M. K. Ng, Hermitian and skew-Hermitian splitting methods fornon-Hermitian positive de�nite linear systems, SIAM J. Matrix Anal. Appl., 24 (2003),pp. 603{626.[5℄ M. Benzi, M. J. Gander and G. H. Golub, Optimization of the Hermitian and skew-Hermitian splitting iteration for saddle-point problems, BIT, 43 (2003), pp. 881{900.[6℄ M. Benzi and G. H. Golub, A pre onditioner for generalized saddle point problems, SIAMJ. Matrix Anal. Appl., 26 (2004), pp. 20{41.[7℄ M. Benzi, G. H. Golub and J. Liesen, Numeri al solution of saddle point problems, A taNumeri a, 14 (2005), pp. 1{137.[8℄ J. H. Bramble and J. E. Pas iak, A pre onditioning te hnique for inde�nite systems resultingfrom mixed approximations of ellipti problems, Math. Comp., 50 (1988), pp. 1{17.[9℄ J. H. Bramble and J. E. Pas iak, Iterative te hniques for time-dependent Stokes problems,Comput. Math. Appl., 33 (1997), pp. 13{30.[10℄ H. C. Elman, D. J. Silvester and A. J. Wathen, Finite Elements and Fast Iterative Solvers,Numeri al Mathemati s and S ienti� Computation, Oxford University Press, Oxford, UK,2005.[11℄ B. Fis her and F. Peherstorfer, Chebyshev approximation via polynomial mappings andthe onvergen e behaviour of Krylov subspa e methods, Ele tr. Trans. Numer. Anal., 12(2001), pp. 205{215.

Eigenvalues of Saddle Point Matri es 21[12℄ B. Fis her, A. Ramage, D. J. Silvester and A. J. Wathen, Minimum residual methods foraugmented systems, BIT, 38 (1998), pp. 527{543.[13℄ M. Fortin and R. Glowinski, Augmented Lagrangian Methods: Appli ation to the Solutionof Boundary-Value Problems, Stud. Math. Appl., Vol. 15, North-Holland, Amsterdam,1983.[14℄ R. W. Freund and N. M. Na htigal, Software for simpli�ed Lan zos and QMR algorithms,Appl. Numer. Math., 19 (1994), pp. 319{341.[15℄ R. Glowinski, Numeri al Methods for Fluids (Part 3). Finite Element Methods for In om-pressible Vis ous Flow, in P. G. Ciarlet and J. L. Lions, eds., Handbook of Numeri alAnalysis, Vol. IX, North-Holland, Elsevier, Amsterdam et ., 2003.[16℄ I. Gohberg, P. Lan aster and L. Rodman, Matrix Polynomials, A ademi Press, New York,London, 1982.[17℄ I. Gohberg, P. Lan aster and L. Rodman, Matri es and Inde�nite S alar Produ ts, Oper-ator Theory: Advan es and Appli ations, Birkh�auser, Basel, 1983.[18℄ G. H. Golub and C. Greif, On solving blo k-stru tured inde�nite linear systems, SIAMJ. S i. Comput., 24 (2003), pp. 2076{2092.[19℄ R. A. Horn and C. R. Johnson, Matrix Analysis, Cambridge University Press, 1985.[20℄ A. S. Householder, The Theory of Matri es in Numeri al Analysis, Blaisdell Publishing Co.,New York, 1964. Reprinted by Dover, New York, 1975.[21℄ K.-A. Mardal and R. Winther, Uniform pre onditioners for the time dependent Stokesproblem, Numer. Math., 98 (2004), pp. 305{327.[22℄ M. F. Murphy, G. H. Golub, and A. J. Wathen, A note on pre onditioning for inde�nitelinear systems, SIAM J. S i. Comput., 21 (2000), pp. 1969{1972.[23℄ C. C. Paige and M. A. Saunders, Solution of sparse inde�nite systems of linear equations,SIAM J. Numer. Anal., 12 (1975), pp. 617{629.[24℄ I. Perugia and V. Simon ini, Blo k-diagonal and inde�nite symmetri pre onditioners formixed �nite element formulations, Numer. Linear Algebra Appl., 7 (2000), pp. 585{616.[25℄ T. Rusten and R. Winther, A pre onditioned iterative method for saddlepoint problems,SIAM J. Matrix Anal. Appl., 13 (1992), pp. 887{904.[26℄ Y. Saad, Iterative Methods for Sparse Linear Systems, Se ond Edition, SIAM, Philadelphia,PA, 2003.[27℄ Y. Saad and M. H. S hultz, GMRES: A generalized minimal residual algorithm for solvingnonsymmetri linear systems, SIAM J. S i. Stat. Comput., 7 (1986), pp. 856{869.[28℄ A. Sidi, A zero- ost pre onditioning for a lass of inde�nite linear systems, WSEASTrans. Math., 2 (2003), pp. 142{150.[29℄ D. J. Silvester and A. J. Wathen, Fast iterative solution of stabilised Stokes systems. II:Using general blo k pre onditioners. SIAM J. Numer. Anal., 31 (1994), pp. 1352{1367.[30℄ V. Simon ini and M. Benzi, Spe tral properties of the Hermitian and skew-Hermitian splittingpre onditioner for saddle point problems, SIAM J. Matrix Anal. Appl., 26 (2004), pp. 377{389.[31℄ G. W. Stewart, Matrix Algorithms. Volume II: Eigensystems, SIAM, Philadelphia, PA, 2001.[32℄ R. Temam, Navier{Stokes Equations, Revised Edition, Studies in Mathemati s and its Appli- ations, North-Holland, Amsterdam/New York/Oxford, 1984.[33℄ H. A. van der Vorst, Bi-CGSTAB: A fast and smoothly onverging variant of Bi-CG forthe solution of non-symmetri linear systems, SIAM J. S i. Stat. Comput., 12 (1992),pp. 631{644.[34℄ H. A. van der Vorst, Iterative Krylov Methods for Large Linear Systems, Cambridge Mono-graphs on Applied and Computational Mathemati s, Cambridge University Press, Cam-bridge, UK, 2003.[35℄ A. J. Wathen, B. Fis her and D. J. Silvester, The onvergen e rate of the minimal residualmethod for the Stokes problem, Numer. Math., 71 (1995), pp. 121{134.