
Numerical Analysis: Solving Nonlinear Equations …na191/wiki.files/NA191_lec...Numerical Analysis:...
29
Numerical Analysis: Solving Nonlinear Equations (part I) Computer Science, Ben-Gurion University (slides based mostly on Prof. Ben-Shahar’s notes) 2018/2019, Fall Semester BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 1 / 29
Transcript of Numerical Analysis: Solving Nonlinear Equations …na191/wiki.files/NA191_lec...Numerical Analysis:...

Numerical Analysis:Solving Nonlinear Equations
(part I)
Computer Science, Ben-Gurion University
(slides based mostly on Prof. Ben-Shahar’s notes)
2018/2019, Fall Semester
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 1 / 29

1 Introduction
2 The Bisection Method
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 2 / 29

Introduction
Introduction
Our next topic for the several next lectures is solving nonlinear equations:
f : R→ R f(x) = 0 x =?
if x satisfies f(x) = 0, then it’s called a root of f .
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 3 / 29

Introduction
Introduction
The seemingly-more general cases of solving
f : R→ R f(x) = b x =?
can be rewritten in the original form above by defining a new function:
fnew : R→ R fnew : x 7→ f(x)− b fnew(x) = 0 x =?
Note:
fnew(x) = 0 ⇐⇒ f(x) = b
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 4 / 29

Introduction
Introduction
Likewise,
f : R→ R g : R→ R f(x) = g(x) x =?
can be handled via
fnew : R→ R fnew : x 7→ f(x)− g(x) fnew(x) = 0 x =?
Note:
fnew(x) = 0 ⇐⇒ f(x) = g(x)
Thus, WLOG, we will focus attention on solving f(x) = 0.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 5 / 29

Introduction
The linear case
If f has the formf(x) = ax+ b
(that is, f is affine), where a and b are known real numbers, then we saythe equation is linear, and the solution to
f(x) = 0
is given (assuming a 6= 0), of course, by
x = − ba.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 6 / 29

Introduction
Some Nonlinear Equations are Easy
Sometimes we know how solve nonlinear equations.
Examples:
x3 − 8 = 0⇒ x = 2 (one solution)
ax2 + bx+ c = 0⇒ x =−b±
√b2 − 4ac
2a(at most two solutions)
sin(x) = 0⇒ x = kπ, k ∈ Z (∞-many solutions)
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 7 / 29

Introduction
Nonlinear Equations
In general, however, if the equation is nonlinear we usually don’t knowhow to solve it analytically.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 8 / 29
Introduction
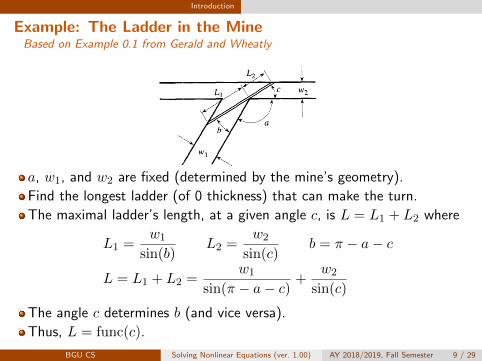
Example: The Ladder in the MineBased on Example 0.1 from Gerald and Wheatly
a, w1, and w2 are fixed (determined by the mine’s geometry).
Find the longest ladder (of 0 thickness) that can make the turn.
The maximal ladder’s length, at a given angle c, is L = L1 + L2 where
L1 =w1
sin(b)L2 =
w2
sin(c)b = π − a− c
L = L1 + L2 =w1
sin(π − a− c)+
w2
sin(c)
The angle c determines b (and vice versa).
Thus, L = func(c).
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 9 / 29

Introduction
Example: The Ladder in the MineBased on Example 0.1 from Gerald and Wheatly
L(c) =w1
sin(π − a− c)+
w2
sin(c)
The longest ladder that can pass is
mincL(c) .
Yes, minimum, not maximum. It’s the bottleneck that matters.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 10 / 29

Introduction
Example: The Ladder in the MineBased on Example 0.1 from Gerald and Wheatly
mincL(c) = min
c
w1
sin(π − a− c)+
w2
sin(c)
From calculus, we know that c , argminc L(c) satisfies
dL
dc
∣∣∣∣c
= 0 .
Thus, we need to solve, for the unknown c, the following equation:
w1cos(π − a− c)sin2(π − a− c)
− w2cos(c)
sin2(c)= 0
Equivalently:
−w1cos(a+ c)
sin2(a+ c)− w2
cos(c)
sin2(c)= 0
How can we solve this?BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 11 / 29

Introduction
Nonlinear Equations
Sometimes, in fact, even if a solution exists, an analytical form for itdoesn’t exist.
For example, the Abel-Ruffini theorem (also known as Abel’simpossibility theorem) states that this is the case for polynomials ofdegree higher than 4.
The theorem is named after Paolo Ruffini, who made an incomplete proof in1799,and Niels Henrik Abel, who provided a proof in 1824.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 12 / 29

Introduction
Finding the Square Root of a Number
Another example we mentioned earlier: how can find the square root of anumber using only the 4 arithmetics operations (addition, subtraction,multiplication, and division) and the operation of comparison?
Example
x ∈ R≥0 x2 − 5 = 0 x =?
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 13 / 29

Introduction
Our discussion so far motivates the need for non-analytical methods,based on simple operations, as means to solving
f : R→ R f(x) = 0 x =?
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 14 / 29

Introduction
Trial and Error
One possible approach is trial and error.
Its disadvantage is that very little can be said, in general, about the itsexpected performance in terms of how fast it will find an approximatedsolution.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 15 / 29

Introduction
Requirements from Numerical Methods
So we want methods that not only approximate a root but also lendthemselves to some useful analysis.
More generally (than the context of solving nonlinear equations), hereare our requirements from numerical methods:
SpeedReliabilityEase to useEasy to analysis
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 16 / 29

The Bisection Method
The Bisection Method
Sometimes, if a certain property (or certain properties) hold for f in acertain domain (e.g., some interval), it guarantees the existence of rootin that domain.
The Bisection method is an example for a method that exploits such arelation, together with iterations, to find the root of a function.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 17 / 29

The Bisection Method
The Bisection Method
The Bisection method (AKA “interval halving” or “binary search”), is aparticular case of the so-called Bracketing methods.
Bracketing methods determine successively smaller intervals (brackets)that contain a root.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 18 / 29

The Bisection Method
The bisection method utilizes the Intermediate Value Theorem.
Theorem (intermediate value)
Let f ∈ C([a, b]).If L ∈ R is a number between f(a) and f(b), that is,
min(f(a), f(b)) < L < max(f(a), f(b)) ,
then there exists c ∈ (a, b) such that f(c) = L.
C([a, b]) is the set of all continuous functions from [a, b] to R.BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 19 / 29

The Bisection Method
A Useful Variant in Our Context
Particularly (taking L = 0):
f ∈ C([a, b]) and f(a) · f(b) < 0⇒ ∃c ∈ (a, b) such that f(c) = 0 .
In other words if f(a) and f(b) have opposite signs, then f must vanishat some c ∈ (a, b).
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 20 / 29

The Bisection Method
Definition (limit of a function at a point)
Let a function f be defined in an open interval containing x0, exceptpossibly at x0 itself. Then f has limit L at x = x0, denoted
limx→x0
f(x) = L ,
if ∀ε > 0 ∃δ such that
|x− x0| < δ ⇒ |f(x)− L| < ε .
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 21 / 29

The Bisection Method
Definition (continuity of a function at a point)
Let f be defined over the open interval (a, b) and let x0 ∈ (a, b). Thefunction f is said to be continuous at x = x0 if
limx→x0
f(x) = f(x0) .
Definition (continuity of a function over an open interval)
A function f is called called continuous over the open interval (a, b) if it iscontinuous at every x ∈ (a, b).
The definitions can be extended to the cases of [a, b), (a, b], or [a, b] usingone-sided limits at the relevant endpoints.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 22 / 29

The Bisection Method
Notation
Cn([a, b]) , {f |f : [a, b]→ R, f and its first n derivatives are continuous}
Thus, C0([a, b]) is simply C([a, b]) (defined in a previous slide).
Example
f : x 7→ x4/3 is in C1([−1, 1]) but not in C2([−1, 1]), since
f ′ =4
3x1/3 f ′′ =
4
9x−2/3 =
4
9
1
x2/3
so f ′′ is discontinuous at x = 0.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 23 / 29

The Bisection Method
The variant of the intermediate value theorem suggests the followingalgorithm.
Input: [a, b] (a bracket) such that f(a) · f(b) < 0; δ > 0 (a tolerance value)Output: z such that |z − z| < δ where z is a root of f (i.e., f(z) = 0)
1 repeat2 z ← 1
2(a+ b)
3 if f(a) · f(z) < 0 then4 b← z5 else6 a← z
7 until |b− a| < 2δ;8 z ← 1
2(a+ b)
Algorithm 1: The Bisection Method
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 24 / 29

The Bisection Method
Example
Figure: WikipediaBGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 25 / 29

The Bisection Method
Example (Multiple Roots)
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 26 / 29

The Bisection Method
Properties of the Bisection Method
Always works (assuming f is continuous): i.e., convergence to a trueroot is guaranteed:
limn→∞
z = z
Why? Since the approximation error after n iterations satisfies
E(n) <
∣∣∣∣b− a2n
∣∣∣∣(so E(n)→ 0)
The number of iterations required for a given approximation accuracy, δ,is known beforehand:
b− a2n≤ δ ⇒ n ≥ log2
(b− aδ
)BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 27 / 29

The Bisection Method
Properties of the Bisection Method (Continued)
Convergence is relatively slow (i.e., a relative large number of iterationsis needed) – we will discuss this topic later on
E(n) might not be a monotonic decreasing function of n.
A big advantage: it is fairly easy to find a good initial guess.– as we will see, in other methods convergence is guaranteed to happenonly when the initial guess is close to the root. This requirement isunnecessary in the bisection method.
Multiple roots for which the function doesn’t change sign will be missed.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 28 / 29

The Bisection Method
Version Log
24/10/2018, ver 1.00.
BGU CS Solving Nonlinear Equations (ver. 1.00) AY 2018/2019, Fall Semester 29 / 29


















