NOVEL GUIDANCE AND NONLINEAR CONTROL SOLUTIONS IN...
46
© 2018 Collins Aerospace, a United Technologies company. All rights reserved. This document does not contain any export controlled technical data. NOVEL GUIDANCE AND NONLINEAR CONTROL SOLUTIONS IN PRECISION GUIDED PROJECTILES RICHARD A. HULL TECHNICAL FELLOW COLLINS AEROSPACE JULY 9, 2019
Transcript of NOVEL GUIDANCE AND NONLINEAR CONTROL SOLUTIONS IN...

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data.
NOVEL GUIDANCE AND
NONLINEAR CONTROL
SOLUTIONS IN
PRECISION GUIDED
PROJECTILES
R I C H A R D A . H U L L
T E C H N I C A L F E L L O W
C O L L I N S A E R O S P A C E
J U L Y 9 , 2 0 1 9

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 2
I. Introduction to Precision Guided Projectiles
SGP 5” Projectile Flight Test Video
Flight Profile Timeline Quiz
Guidance, Navigation, Control Block Diagram
Guidance, Navigation and Control Issues
II. Guidance Law – GENEX
III. Nonlinear Robust Control Law Design
Background – Dynamic Inversion, Feedback Linearization, Back-stepping, Robust Recursive
IV. Nonlinear Recursive Pitch-Yaw Autopilot Design for a Guided Projectile
Nonlinear Recursive Pitch-Yaw Controller Design
Aerodynamic Functions for Hypothetical Projectile
Pitch-Yaw Controller Equations
Mass Properties for Hypothetical Projectile
MATLAB Simulation Results for Hypothetical Pitch-Yaw Projectile Controller
V. Conclusions
OUTLINE:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 3
5- inch Mu l t i Serv ice S tandard Gu ided Pro jec t i le
•Video Courtesy of BAE Systems
https://www.bing.com/videos/search?q=Navy+5+inch+guided+projectile+video&view=detail&mid=E674
46D3A21E0F0E9D7FE67446D3A21E0F0E9D7F&FORM=VIRE

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 4
SYSTEM BLOCK DIAGRAM
Guidance
Law
GPS
Receiver
Navigation
Filter
Inertial
Sensors
Autopilot Airframe/
Propulsion
Projectile
Motion
Target
Location Control
Augmentation
System
Nav
Solution
IMU output
Actuator
Deflections Steering
Commands
Actuator
Commands
Guidance, Navigation and Control
Antenna

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 5
GUIDANCE ISSUES:
Minimum Control Effort Optimal Control Problem with:
• Final Position (Miss Distance) Constraint
• Terminal Angle of Fall (Velocity Unit Vector) Constraint
• Control Action Constraint (Normal to Velocity Vector)
• Nonlinear Dynamics (True Optimal Solution is TPBV Problem)
• May be Final Time (Time on Target) Constraint
Several Well Known Sub-Optimal Solutions
• Modifications to Biased Proportional Nav
• Explicit Guidance
• Generalized Explicit Guidance (GENEX)
• Not well suited to Guided Projectiles of “Limited Maneuver Capability”

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 6
NAVIGATION ISSUES:
• Electronics Must Be Densely Packaged and Low Cost!
• Inertial Sensors Must Survive High “G” Gun Launch
Environment (~10,000 g’s)
• GPS Must Acquire Quickly, In-Flight, On A Rapidly Moving,
Spinning Projectile
• Navigation Filter Must Initialize and Self-Orient In Mid-Flight
• What to Do if GPS is Unavailable

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 7
CONTROL ISSUES:
• Ballistic Portion of Flight Must Avoid Roll Resonance Issues
• Airframe Control Capture at Canard Deployment
• Airframe May Become Unstable at Canard Deploy
• IMU Sensors May Be Saturated at Canard Deploy
• High Roll Rate
• Deployment Shock
• Large Flight Envelope of Mach and Dynamic Pressure
• Rapidly Changing Flight Envelope
• Winds and Variations in Atmospheric Properties Cause Significant Uncertainties in Gain Scheduled Parameters (No Air Data Probes)
• Highly Nonlinear and Uncertain Aerodynamics
• Canard “Vortex Shedding” Interactions with Tails
• Uncertain Tail “Clocking” Relative to Canards

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 8
EXPLICIT GUIDANCE
Solution to a Time Varying Linear Optimal Control Problem of the form:
ft
dtu
J0
2
2 minimize
Subject to the following state constraints:
Which yields the optimal control:
21226
1xTx
Tu
Note – we often augment this with an acceleration term
to include known effects of gravity and drag.
Where we define:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 9
GENERALIZED EXPLICIT GUIDANCE (GENEX) “Generalized Vector Explicit Guidance”, Ernest J. Ohlmeyer and Craig A. Phillips, AIAA Journal of
Guidance, Control and Dynamics, Vol. 29, No. 2, March-April 2006
Solution to a Time Varying Linear Optimal Control Problem of the form:
ft
ndt
T
uJ
0
2
2 minimize
Subject to the following state constraints:
Which yields the optimal control:
)2)(1(
)3)(2(
:where
1
2
1
22112
nnk
nnk
TxkxkT
u
Where we define:
Family of functions, parameterized by scalar n
Higher n allows greater penalty weight on control
usage as T → 0
Note that n = 0 results in k1 = 6 and k2 = -2 reducing to
the standard explicit guidance gains

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 10
GENEX wi th Grav i t y Term (NEW) :
Note on Updated Derivation of Generalize Explicit Guidance to Include Gravity Acceleration Term from
Ernie Ohlmeyer, May 2016
Solution to a Time Varying Linear Optimal Control Problem of the form:
ft
ndt
T
uJ
0
2
2 minimize
Subject to the following state constraints:
Which yields the optimal control:
Where we define:
Family of functions, parameterized by scalar n
Higher n allows greater penalty weight on control
usage as T → 0
gkTxkxkT
u 322112
1
2
)1)(2(
)2)(1(
)3)(2( :where
3
2
1
nnk
nnk
nnk
Setting k3 = 0 recovers original GENEX

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 11
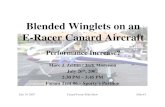
EXAMPLE TRAJECTORIES USING GENEX
GENEX Guidance from Apogee
V0 = 1000 m/s
Launch Elevation = 50 deg
Final Gamma = -80 deg
Target Range = 50 km
0 10 20 30 40 50 60-2
0
2
4
6
8
10
12
14GENEX Guided Projectile
Ground Range - km
Altit
ude
- k
m
N = 0.5
N = 1.0
N = 1.5
N = 2.0
N = 2.5
0 50 100 150 200 2500
1
2
3GENEX Guided Projectile
Mach
0 50 100 150 200 250-100
-50
0
50
gam
ma
- d
eg
0 50 100 150 200 2500
5
10
15
20
25
Alp
ha
T -
de
g
0 50 100 150 200 2500
2
4
6
time
guid
ance
cm
ds
mag
- ge
es
N = 0.5
N = 1.0
N = 1.5
N = 2.0
N = 2.5

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 12
RECURSIVE CONTROL DESIGN:
“Recursivist” – one who views the world
as a giant opportunity to apply the
rigorous methods of recursive nonlinear
control design, one layer at a time!
See also “Integrator Backsteppinger”,“Dynamic
Inversionist” and “Feedback Linearizationist”

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 13
DYNAMIC INVERSION
Given a nonlinear system “affine” w.r.t. the control input:
If g(x) is invertible the control:
Will cause the system to track the desired dynamics :
Note that we are not actually inverting the dynamics of the
entire system, only the algebraic input connection matrix!

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 14
DYNAMIC INVERSION
The primary restrictions on Dynamic Inversion are:
1. The system must be scalar or square – that is it must
have the same number of inputs as states, and
2. The matrix g(x) must be non-singular over the entire
region of interest.
Invertibility of g(x) also insures stability of the zero dynamics, so that
the system is minimum phase.
In fact, it is a stronger condition, which guarantees that the system
can be decoupled into n independently controllable subsystems by the
n control inputs.
This condition is somewhat rare in real systems!

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 15
FEEDBACK L INEARIZATION
• Not Conventional (Jacobi) Linearization
• Systematic Method for finding a state transformation that maps the
system to an “equivalent” linear system.
• Design Control for the Linear System
• Map the Control back to the original nonlinear system.
x u
z(x)z
Linearization loop
v)u(x,u zkvT0
Pole-Placement loop z

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 16
FEEDBACK L INEARIZATION
Feedback Linearization involves a transformation of state variables in order to
make the control design and stability analysis of the system easier.
Nonlinear
System
Linear
System
State
Transformation
Control
Design
Stable Linear
System Inverse State
Transformation
Stable
Nonlinear
System
But, in order to guarantee “equivalence” of dynamics and transference of stability
properties between the linear and nonlinear systems, we must rely on concepts from set
theory, and differential geometry.

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 17
FEEDBACK L INEARIZATION - COMMENTS
Input-Output Feedback Linearization is more desirable for the control
of missiles and aircraft, in which output tracking (command following)
is of interest.
Exact Output Tracking is not possible for non-minimum phase
systems, which are equivalent to systems with less than full
relative degree (r < n), and unstable zero dynamics.
The machinery of State Feedback Linearization could be used to
find an alternative output for non-minimum phase acceleration
tracking – however the transformations are fairly intractable .
Tail Control of Aircraft and Missiles exhibits minimum phase
response in alpha and beta, but non-minimum phase
characteristics in normal accelerations.

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 18
INTEGRATOR BACKSTEPPING
)(xf
)(xg + u x
Given:
Design a stabilizing “fictitious: control for the output
subsystem:
)()()( xxgxf
)(xg + u x
+
)(x
)(x

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 19
INTEGRATOR BACKSTEPPING
Then “backstep” that control through the integrator of the previous
subsystem:
)()()( xxgxf
)(xg + u x
+ z
It can be seen that a change of variable is
equivalent to adding zero to the original subsystem:
)(xz
Resulting in an equivalent subsystem:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 20
RECURSIVE DESIGN
By recursive application of Integrator Backstepping, we
can extend the results to higher order systems provided
they have the strict feedback cascaded form:
At each step we define a
new state variable:
Until the control design
equation “pops” out:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 21
RECURSIVE DESIGN
Also at each step, we recursively accumulate the terms
of the Lyapunov function:
22
2
2
12
1
2
1
2
1nzzzV
For which it can be shown:
Advantages of Recursive Backstepping Design
over Feedback Linearization
1. Transformation is simple (no PDE’s to solve)
2. No need to cancel “beneficial” nonlinearities
3. No need to cancel “weak” nonlinearities
4. Can add robust stabilizing terms to overcome uncertainties

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 22
ROBUST RECURSIVE DESIGN
Model the system with uncertainties:
Which meet the Generalized Matching Conditions
iizf )(
Bound the uncertainty that appears in the equations:
Add a robust fictitious control term to the
Such as:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 23
DYNAMIC RECURSIVE DESIGN
Dynamic Recursive Design extends the Recursive Process to
systems which do not meet the strict feedback cascaded form:
By differentiating u (n-r) times to
create additional state variables, such
that:
Until the control design that
“pops” out is a derivative of u:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 24
6-DOF RIGID BODY EQUATIONS OF MOTION
Bω BΘ
Bv IX
z
y
x
B
v
v
v
v
r
q
p
Bω
),,(
BΘ
z
y
x
Ix
Y
P
R
u
Bf
BM
Bα
u
Recursive Design for Pitch/Yaw Acceleration Control
z
y

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 25
6-DOF RIGID BODY EQUATIONS OF MOTION
12 state equations in body coordinates:
Bf
BM
External body forces
External body moments
BJ Moment of Inertia Matrix
mass m
Using the Euler Rate equations:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 26
6-DOF RIGID BODY EQUATIONS OF MOTION
pz
yy
rx
z
y
x
ypz
ypy
rypx
B
qMF
qMF
qMF
qMF
qMF
qMF
qMF
qMF
qMF
i
i
i
BT
BT
BT
,,,,
,,,,
,,,,
,,,
,,,
,,,
,,,,,
,,,,,
,,,,,,
f
coscoscossinsin
sinsincoscossinsinsinsincoscossincos
cossincossinsincossinsinsincoscoscos1 T
BIBI TT
The external body forces are computed as functions of:
T
11 sintan
T
y
z
x
v
v
v
v
222
zyxT vvvv
Body Tail + Canard Control Increments
pressure dynmaic
Number,Mach
Slip Side of Angle
Attack of Angle
:where
q
M

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 27
Recursive Design for Coupled Pitch/Yaw Controller
Where represent robust fictitious control terms to
overcome bounded uncertainties.
Dyy
Dzz
1 aa
aaz
First, Define Output Error States:
feedback onaccelerati yaw a
feedback onaccelerati pitch a
onaccelerati yaw desired a
onaccelerati pitch desired a
y
z
Dy
Dz
21,
Then, recursively define the state transformations:
Reference: Dynamic Robust Recursive Control: Theory and Applications, Ph.D.
Dissertation, Richard A. Hull, University of Central Florida, Orlando Florida, 1996.

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 28
Recursive Design for Coupled Pitch/Yaw Controller
The Design Equation (without robust terms) is:
Where:
and define the body normal accelerations to be:
Where Fz and Fy are the aerodynamic forces normal to the body x axis.
We write the Recursive Design Equation for an acceleration controller:
Assume that are known parameters, mvmq ,,,,
Choosing the desired dynamics to map to a stable linear system:
y
z
y
z
Bm F
F1
a
aa
21,kkDesign gains:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 29
Recursive Design for Coupled Pitch/Yaw Controller

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 30
Recursive Design for Coupled Pitch/Yaw Controller
Using just the pitch and yaw dynamic equations and assuming p = 0, we
can compute the rate of change in alpha and beta:
Then, assuming small angle approximations for alpha and beta:

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 31
Recursive Design for Coupled Pitch/Yaw Controller
Using approximations for the time derivatives of alpha and beta:
We will solve for the control input to give the required body angular accelerations …

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 32
Recursive Design for Coupled Pitch/Yaw Controller
Recalling the recursive design equation,
and using the pitch-yaw acceleration and body rate vectors:
We can substitute the preceding results into the design equation
Where we have defined
r
qB
Y
Z
B ωa ,a
a
yy
zz
FF
FF
F

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 33
Recursive Design for Coupled Pitch/Yaw Controller
Now, provided F is invertible, we can solve the recursive design
equation, for the required body angular accelerations:
Equating to the body moment equations:
We can solve for the body moments required to give the desired
body acceleration response:
Then, we “invert” the aerodynamic moment equations to find the
pitch and yaw control input deflections that will give the required
body moments above.

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
Convent ions fo r Aerodynamic Def in i t ions
Body Axes
X
Y
Z
Body Rates
& Moments X
Y
Z
Body Velocities,
& Forces
X
Y
Z
sBody ForceF,F,F
nts Body MomeNM,L,
Velocities Body wv,u,
s Body Rate,,
n, DeflectioCanard
Slip Side of Angle
Attack of Angle
:where
zyx
rqp
Pitch Plane
Stability
Axes X
Y
Z
Yaw Plane
Stability Axes
X
Y
Z
p, L
r, N
q, M
u, Fx
v, Fy
w, Fz
V
V

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 35
Hypothe t i ca l Pro jec t i le Aerodynamics Mode l
Define aerodynamic forces and moments in the pitch and yaw axes in
terms of alpha, beta, and the pitch and yaw control deflections as:
Moment YawingAero ),,(
Moment PitchingAero ),,(
axisbody y along ForceAero ),,(
axis zbody along ForceAero ),,(
Ynrefref
Pmrefref
YYrefy
PZrefz
ClSqn
ClSqm
CSqF
CSqF
YYn
PPm
YYY
PPZ
C
C
C
C
700.015.051.0195.000215.),,(
700.015.051.0195.000215.),,(
034.00055.017.00945.000103.),,(
034.00055.017.00945.000103.),,(
3
3
23
23
Where:
Assume aerodynamic coefficients are the following functions of alpha,
beta, pitch and yaw control deflections (in degrees):
length reference area, reference pressure, dynamic refref lSq
Coupled
Nonlinear
Equations
in Alpha
and Beta

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 36
Aerodynamic Force and Moment Coefficients for a Hypothetical Projectile
as Function of Alpha, Beta for Delta = 0
-40-20
020
40-50
0
50-20
-15
-10
-5
0
5
10
15
20
alpha - deg
Aero Moments Coefficients - delta = 0
beta - deg
Cm
-40 -20 0 20 40
-50
0
50-15
-10
-5
0
5
10
15
alpha - deg
Aero Force Coefficients - delta = 0
beta - deg
Cz

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 37
Aerodynamic Force and Moment Coefficients for a
Hypothetical Projectile as Function of Alpha, Beta and Delta
-25 -20 -15 -10 -5 0 5 10 15 20 25-25
-20
-15
-10
-5
0
5
10
15
20
25
Alpha -deg
Cm
Hypothetical Projectile Aero Coefficients, Beta =0
-25 -20 -15 -10 -5 0 5 10 15 20 25-6
-4
-2
0
2
4
6
Alpha -deg
Cz
delta = 20
delta = 15
delta = 10
delta = 5
delta = 0
delta = -5
delta = -10
delta = -15
delta = -20
-Cm at +alpha indicates
stable airframe
10 deg delta to trim at
15 deg alpha
Neutrally stable with zero
delta around alpha = 0
+ Alpha = - Fz
+ delta = - accel -20 deg
+20 deg
+ delta = + moment

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 38
Recursive Pitch/Yaw Controller for the Hypothetical Projectile
034.0 ,00055.0 ,017.0 ,00945.0 ,000103.0 :where
),,(
),,(
14321
1
2
432
3
1
1
2
432
3
1
baaaa
baaaaC
baaaaC
YYY
PPZ
Using the Force Coefficient Polynomials:
We can find the required “aero slopes” matrix:
180
yy
zz
refyy
zz
CC
CC
SqFF
FF
F
432
2
1
2
4
2
4432
2
1
2)(sign23 ,
, 2)(sign23
aaaaC
aC
aC
aaaaC
YY
ZZ
From the coefficient polynomials:
degrees! in are ),( because

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 39
Recursive Pitch/Yaw Controller for the Hypothetical Projectile
Using F, we compute the required body angular rates and moments:
where: are from the accelerometer and gyro feedbacks
the following parameters are estimated in real-time:
r
qB
Y
Z
B ωa ,a
a
yyyz
yzzz
JJ
JJ intetial of momentspitch/yaw
projectile of mass
projectile ofvelocity
pressure dynmaic
Slip Side of Angle andAttack of Angle ,
B
m
m
v
q
J
And are gains chosen by the designer to place the poles of the
feedback linearized system. 21,kk
Inertia Coupling Included
Ignore – pitch and yaw
components are zero if p = 0
Note – in the autopilot we have let
w_b(2) = -r , therefore reverse the
sign of the required yaw moment!

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 40
Recursive Design Applied to the Hypothetical Projectile
700.0 ,015.0 ,051.0 ,0195.0 ,000215.0 :where
),,(
),,(
14321
1432
3
1
1432
3
1
dcccc
dccccC
dccccC
YYn
PPm
Finally, we use the aerodynamic moment equations:
to solve for the pitch and yaw control deflections needed to
give the required pitch and yaw moments:
length. andarea reference known theare and and
time,-real in estimated are , , , :parameters theagain where
11
11
:are commands deflection control yaw and pitch theso
),,(
),,(
432
3
1
1
432
3
1
1
refref
R
Y
refref
Y
R
p
refref
P
Yn
Pm
refrefR
Y
R
pR
B
lS
q
ccccMlSqd
ccccMlSqd
C
ClSq
M
M
M
Note: Pitch and Yaw Control
Contributions May Not be
De-coupled in the Real World!
Note – in the autopilot we have let
w_b(2) = -r , therefore reverse the
sign of the required yaw moment!

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 41
Hypothetical Projectile Parameters
A totally fictitious configuration intended as a model to study
guidance and control issues for guided projectiles.
Model Parameters
Parameter Value Units
Diameter 140 mm
Mass 50 kg
Xcg (from nose) 1.0 m
Ixx 0.200 Kg-m^2
Iyy = Izz 18.00 Kg-m^2
Iyz = Izy 0.50 Kg-m^2
Sref (aero reference area) 0.0154 m^2
Lref (aero reference length) 1.0 m
MRC (aero model ref center) 1.0 m

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 42
MATLAB/Simulink Simulation

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 43
MATLAB/Simulink Simulation Results
Simultaneous Pitch and Yaw Step Commands
Full Coupled Nonlinear Aero Model with Inertia Coupling
Simultaneous Pitch and Yaw Step Commands
Full Coupled Nonlinear Aero Model with Inertia Coupling
0 5 10 15 20-100
-50
0
50
100
Pitch
Accel
- m
/s2
Pitch Channel
response
command
0 5 10 15 20-10
-5
0
5
10
alp
ha
- d
eg
0 5 10 15 20-100
-50
0
50
100
Pitch
Ra
te -
deg
/s
0 5 10 15 20-4
-2
0
2
4
delt
a P
itch -
deg
Time - sec
0 5 10 15 20-100
-50
0
50
100
Yaw
Acce
l -
m/s2
Yaw Channel
response
command
0 5 10 15 20-10
-5
0
5
10
beta
- d
eg
0 5 10 15 20-100
-50
0
50
100
Yaw
Ra
te -
deg
/s
0 5 10 15 20-5
0
5
delt
a Y
aw
- d
eg
Time - sec

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 44
MATLAB/Simulink Simulation Results
Simultaneous Pitch and Yaw Step Commands at Different Frequencies
Full Coupled Nonlinear Aero Model with Inertia Coupling
0 5 10 15 20-100
-50
0
50
100
Pitch
Accel
- m
/s2
Pitch Channel
response
command
0 5 10 15 20-10
-5
0
5
10
alp
ha
- d
eg
0 5 10 15 20-100
-50
0
50
100
Pitch
Ra
te -
deg
/s
0 5 10 15 20-4
-2
0
2
4
delt
a P
itch -
deg
Time - sec
0 5 10 15 20-100
-50
0
50
100
Yaw
Acce
l -
m/s2
Yaw Channel
response
command
0 5 10 15 20-10
-5
0
5
10
beta
- d
eg
0 5 10 15 20-100
-50
0
50
100
Yaw
Ra
te -
deg
/s
0 5 10 15 20-6
-4
-2
0
2
4
delt
a Y
aw
- d
eg
Time - sec

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 45
Summary and Conc lus ions
• Precision Guided Projectiles Pose Challenging Guidance, Navigation and Control
Problems
• GENEX Guidance Law Provides an Analytical Solution to the Optimal Guidance
Problem
• Nonlinear Recursive Control Design Approach Demonstrated to Get Analytical Solution
for Pitch/Yaw Autopilot for a Hypothetical Projectile with Coupled Nonlinear
Aerodynamics and Off-Diagonal Inertia Coupling Terms.
• Method requires computation of “slopes” of aerodynamic force functions, and
inverse of aero moment functions
• Good tracking control can be achieved without addition of integrators to controller
• Good method for getting quick “simulation quality” controller
• Problems may occur if aerodynamic partial derivatives matrix becomes ill-
conditioned
• Additional terms can be added to provide robustness to bounded uncertainties and
un-modelled nonlinear dynamics

© 2018 Collins Aerospace, a United Technologies company. All rights reserved.
This document does not contain any export controlled technical data. 46
REFERENCES
1. Ernest J. Ohlmeyer and Craig A. Phillips, “Generalized Vector Explicit Guidance”, AIAA Journal of Guidance, Control
and Dynamics, Vol. 29, No. 2, March-April 2006
2. Buffington, J. M., Enns, D. F., and Teel, A. R., “Control Allocation and Zero Dynamics, AIAA Guidance, Navigation, and
Control Conference, San Diego, CA, Aug. 1996.
3. Colgren, R., and Enns, D, “Dynamic Inversion Applied to the F-117A”, AIAA Modeling and Simulation Technologies
Conference, New Orleans, LA, Aug. 1997.
4. Hull, R. A., “Dynamic Robust Recursive Control Design and Its Application to a Nonlinear Missile Autopilot,” Proceedings
of the 1997 American Control Conference, Vol. I, pp. 833-837, 1997.
5. Buffington, J. M. , and Sparks, A. G., “Comparison of Dynamic Inversion and LPV Tailless Flight Control Law Designs”,
Proceedings of the American Control Conference, June, 1998.
6. Hull, R. A., Ham, C., and Johnson, R. W., Systematic Design of Attitude Control System for a Satellite in a Circular Orbit
with Guaranteed Performance and Stability, Proceedings of the 14th Annual AIAA/Utah State University Small Satellite
Conference, August, 2000.
7. McFarland, M. B. and Hogue, S. M., “ Robustness of a Nonlinear Missile Autopilot Designed Using Dynamic Inversion”,
AIAA 2000-3970.
8. Slotine, J.-J. E., and Li, W., Applied Nonlinear Control, Prentice Hall, 1991.
9. Krstic, M., Kanellakopoulos, I., Kokotivic, P., Nonlinear and Adaptive Control Design, John Wiley & Sons, 1995.
10. Qu, Z., Robust Control of Nonlinear Uncertain Systems, John Wiley & Sons, 1998.
11. Khalil, H. K., Nonlinear Systems, Third Edition, Prentice Hall, 2002.